
Event-Triggered Cooperative Predictive Control for Networked Multi-Agent Systems with Random Delays and Packet Dropouts



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (i)
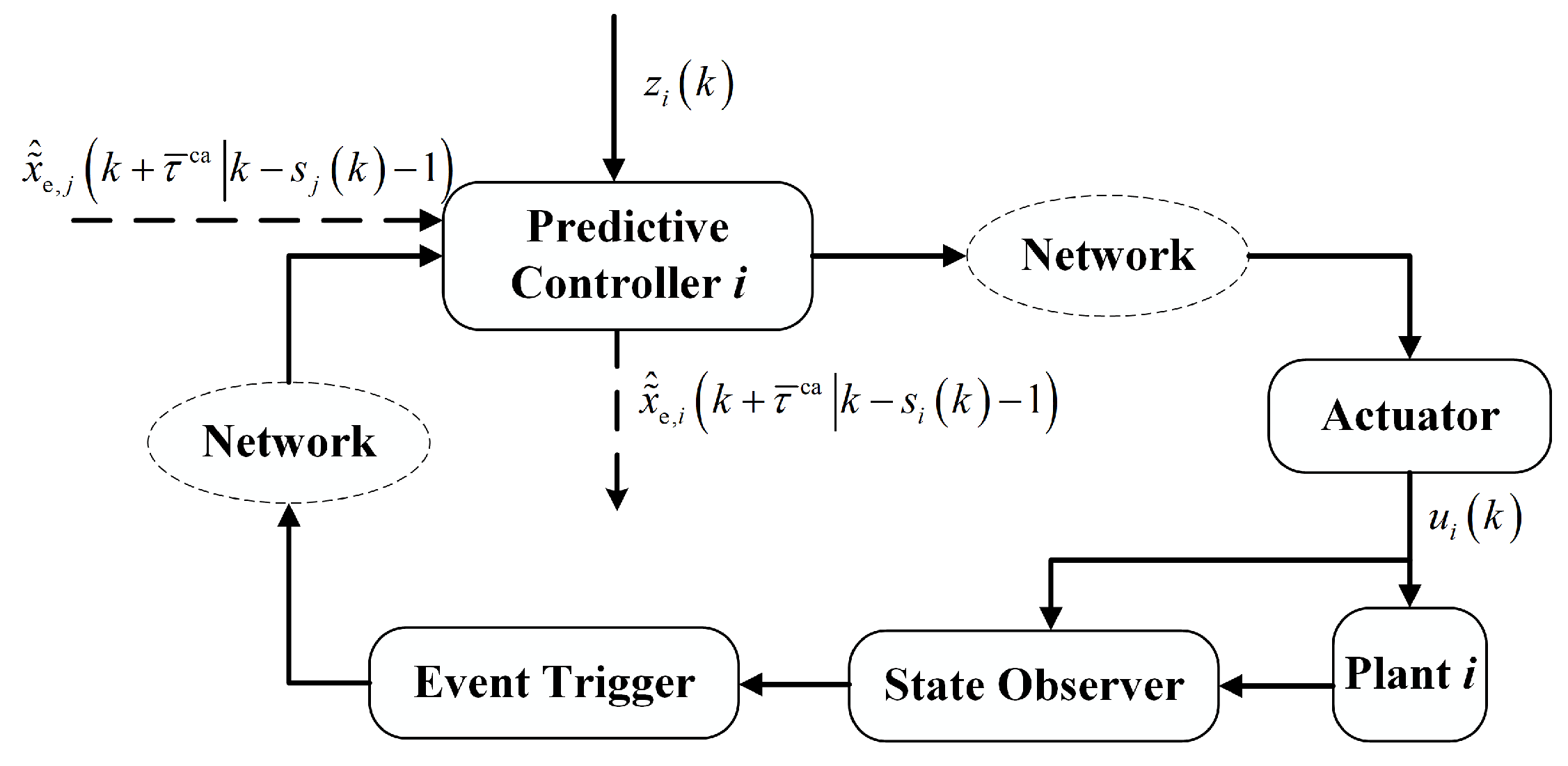
- An event-triggering transmission mechanism is introduced in the feedback channel of each agent to reduce data transmission times. Furthermore, the state observer is placed at the plant side of each agent, and thus, only a single state estimate is needed to be transmitted to the controller. The effect of the network on the state estimates is eliminated.
- (ii)
- A novel cooperative output tracking predictive control protocol with proportional and integral actions is designed, where predicted system estimate increments and output tracking errors are used, and a necessary and sufficient condition is obtained for the stability of the resulting closed-loop system.
- (iii)
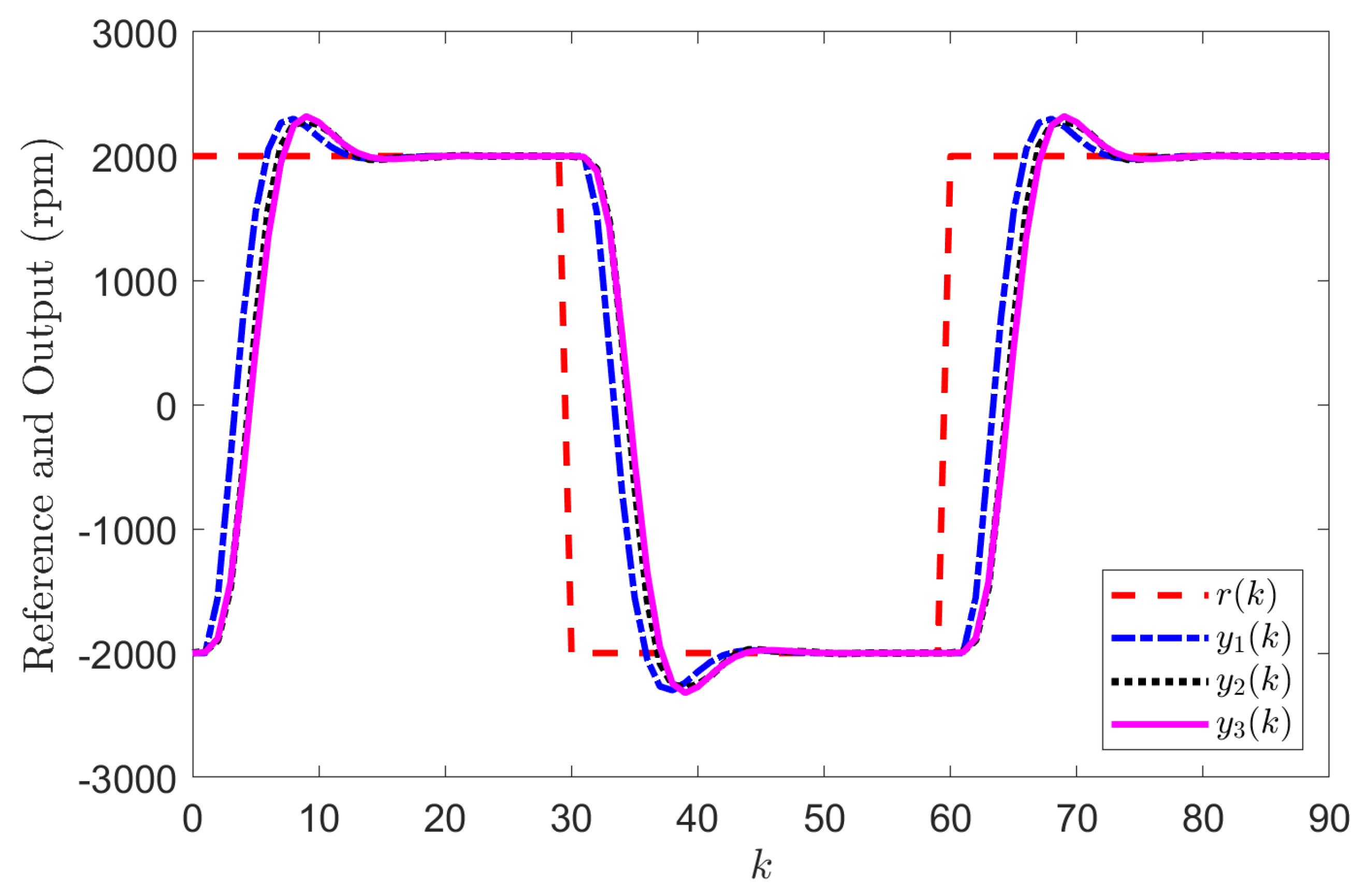
- Numerical simulation is carried out for an NMAS consisting of three DC motor systems, and four cases of simulation results are provided and compared, which illustrate the effectiveness of the proposed control scheme.
2. Control Scheme
3. Stability Analysis
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, G.-P.; Zhang, S. A survey on formation control of small satellites. Proc. IEEE 2018, 106, 440–457. [Google Scholar] [CrossRef]
- Liu, Y.; Montenbruck, J.M.; Zelazo, D.; Odelga, M.; Rajappa, S.; Bülthoff, H.H.; Allgöwer, F. A distributed control approach to formation balancing and maneuvering of multiple multirotor UAVs. IEEE Trans. Rob. 2018, 34, 870–882. [Google Scholar] [CrossRef]
- Saradagi, A.; Muralidharan, V.; Krishnan, V.; Menta, S.; Mahindrakar, A.D. Formation control and trajectory tracking of nonholonomic mobile robots. IEEE Trans. Control Syst. Technol. 2018, 26, 2250–2258. [Google Scholar] [CrossRef]
- Su, Y. Output feedback cooperative control for linear uncertain multiagent systems with nonidentical relative degrees. IEEE Trans. Autom. Control 2016, 61, 4027–4033. [Google Scholar] [CrossRef]
- Liu, T.; Huang, J. Adaptive cooperative output regulation of discrete-time linear multi-agent systems by a distributed feedback control law. IEEE Trans. Autom. Control 2018, 63, 4383–4390. [Google Scholar] [CrossRef]
- Han, T.; Zheng, W.X. Bipartite output consensus for heterogeneous multi-agent systems via output regulation approach. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 281–285. [Google Scholar] [CrossRef]
- Pang, Z.-H.; Zheng, C.-B.; Sun, J.; Han, Q.-L.; Liu, G.-P. Distance-and velocity-based collision avoidance for time-varying formation control of second-order multi-agent systems. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 1253–1257. [Google Scholar] [CrossRef]
- Hong, H.; Wang, H. Fixed-time formation control for second-order disturbed multi-agent systems under directed graph. Symmetry 2021, 13, 2295. [Google Scholar] [CrossRef]
- Liu, G.-P. Coordinated control of networked multiagent systems via distributed cloud computing using multistep state predictors. IEEE Trans. Cybern. 2022, 52, 810–820. [Google Scholar] [CrossRef] [PubMed]
- Pang, Z.-H.; Zheng, C.-B.; Li, C.; Liu, G.-P.; Han, Q.-L. Cloud-based time-varying formation predictive control of multi-agent systems with random communication constraints and quantized signals. IEEE Trans. Circuits Syst. II Express Briefs 2021. [Google Scholar] [CrossRef]
- Liu, Z.; Yan, W.; Li, H.; Small, M. Cooperative output regulation problem of multi-agent systems with stochastic packet dropout and time-varying communication delay. J. Franklin Inst. 2018, 355, 8664–8682. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, X.-M.; He, W.; Han, Q.-L.; Peng, C. Sampled-position states based consensus of networked multi-agent systems with second-order dynamics subject to communication delays. Inf. Sci. 2020, 509, 36–46. [Google Scholar] [CrossRef]
- Shariati, A.; Zhao, Q. Robust leader-following output regulation of uncertain multi-agent systems with time-varying delay. IEEE/CAA J. Autom. Sin. 2018, 5, 807–817. [Google Scholar] [CrossRef]
- Ma, L.; Wang, Y.-L.; Han, Q.-L. H∞ cluster formation control of networked multiagent systems with stochastic sampling. IEEE Trans. Cybern. 2021, 51, 5761–5772. [Google Scholar] [CrossRef]
- Liu, G.-P. Predictive control of networked multiagent systems via cloud computing. IEEE Trans. Cybern. 2017, 47, 1852–1859. [Google Scholar] [CrossRef]
- An, B.-R.; Liu, G.-P.; Tan, C. Group consensus control for networked multi-agent systems with communication delays. ISA Trans. 2018, 76, 78–87. [Google Scholar] [CrossRef] [PubMed]
- Tan, C.; Yin, X.; Liu, G.-P.; Huang, J.; Zhao, Y.-B. Prediction-based approach to output consensus of heterogeneous multi-agent systems with delays. IET Control Theory Appl. 2018, 12, 20–28. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.-Q.; Wang, Y.-L.; Wang, T.-B. Incremental predictive control-based output consensus of networked unmanned surface vehicle formation systems. Inf. Sci. 2018, 457, 166–181. [Google Scholar] [CrossRef]
- Tan, C.; Yue, L.; Li, Y.; Liu, G.-P. Group consensus control for discrete-time heterogeneous multi-agent systems with time delays. Neurocomputing 2020, 392, 70–85. [Google Scholar] [CrossRef]
- Chen, D.-L.; Liu, G.-P. A networked predictive controller for linear multi-agent systems with communication time delays. J. Frankl. Inst. 2020, 357, 9442–9446. [Google Scholar] [CrossRef]
- Yang, H.; Ju, S.; Xia, Y.; Zhang, J. Predictive cloud control for networked multiagent systems with quantized signals under doS attacks. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 1345–1353. [Google Scholar] [CrossRef]
- Pang, Z.-H.; Luo, W.-C.; Liu, G.-P.; Han, Q.-L. Observer-based incremental predictive control of networked multi-agent systems with random delays and packet dropouts. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 426–430. [Google Scholar] [CrossRef]
- Qi, W.; Zong, G.; Zheng, W. Adaptive event-triggered SMC for stochastic switching systems with semi-Markov process and application to boost converter circuit model. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 786–796. [Google Scholar] [CrossRef]
- Jin, Y.; Qi, W.; Zong, G. Finite-time synchronization of delayed semi-Markov neural networks with dynamic event-triggered scheme. Int. J. Control Autom. Syst. 2021, 19, 2297–2308. [Google Scholar] [CrossRef]
- Nowzari, C.; Garcia, E.; Cortés, J. Event-triggered communication and control of networked systems for multi-agent consensus. Automatica 2019, 105, 1–27. [Google Scholar] [CrossRef] [Green Version]
- Yi, X.; Liu, K.; Dimarogonas, D.V.; Johansson, K.H. Dynamic event-triggered and self-triggered control for multi-agent systems. IEEE Trans. Autom. Control 2019, 64, 3300–3307. [Google Scholar] [CrossRef]
- He, W.; Xu, B.; Han, Q.-L.; Qian, F. Adaptive consensus control of linear multiagent systems with dynamic event-triggered strategies. IEEE Trans. Cybern. 2020, 50, 2996–3008. [Google Scholar] [CrossRef] [PubMed]
- Hu, W.; Yang, C.; Huang, T.; Gui, W. A distributed dynamic event-triggered control approach to consensus of linear multiagent systems with directed networks. IEEE Trans. Cybern. 2020, 50, 869–874. [Google Scholar] [CrossRef]
- Pang, Z.; Bai, C.; Liu, G.; Han, Q.; Zhang, X. A novel networked predictive control method for systems with random communication constraints. J. Syst. Sci. Complex. 2021, 34, 1364–1378. [Google Scholar] [CrossRef]
- Pang, Z.-H.; Xia, C.-G.; Zhai, W.-F.; Liu, G.-P.; Han, Q.-L. Networked active fault-tolerant predictive control for systems with random communication constraints and actuator/sensor faults. IEEE Trans. Circuits Syst. II Express Briefs 2021. [Google Scholar] [CrossRef]
- Pang, Z.-H.; Fan, L.-Z.; Sun, J.; Liu, K.; Liu, G.-P. Detection of stealthy false data injection attacks against networked control systems via active data modification. Inf. Sci. 2021, 546, 192–205. [Google Scholar] [CrossRef]
- Pang, Z.-H.; Fan, L.-Z.; Dong, Z.; Han, Q.-L.; Liu, G.-P. False data injection attacks against partial sensor measurements of networked control systems. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 149–153. [Google Scholar] [CrossRef]
- Mustafa, A.; Modares, H. Attack analysis and resilient control design for discrete-time distributed multi-agent systems. IEEE Rob. Autom. Lett. 2020, 5, 369–376. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pang, Z.; Du, T.; Zheng, C.; Li, C. Event-Triggered Cooperative Predictive Control for Networked Multi-Agent Systems with Random Delays and Packet Dropouts. Symmetry 2022, 14, 541. https://doi.org/10.3390/sym14030541
Pang Z, Du T, Zheng C, Li C. Event-Triggered Cooperative Predictive Control for Networked Multi-Agent Systems with Random Delays and Packet Dropouts. Symmetry. 2022; 14(3):541. https://doi.org/10.3390/sym14030541
Chicago/Turabian StylePang, Zhonghua, Tao Du, Changbing Zheng, and Chao Li. 2022. "Event-Triggered Cooperative Predictive Control for Networked Multi-Agent Systems with Random Delays and Packet Dropouts" Symmetry 14, no. 3: 541. https://doi.org/10.3390/sym14030541
APA StylePang, Z., Du, T., Zheng, C., & Li, C. (2022). Event-Triggered Cooperative Predictive Control for Networked Multi-Agent Systems with Random Delays and Packet Dropouts. Symmetry, 14(3), 541. https://doi.org/10.3390/sym14030541