1. Introduction
Throughout the present study,
denotes an arbitrary normed field and
represents the ring of polynomials over
. The vector space
is equipped with
p-norm
for some
and with the vector norm
which are defined by
Let
be a polynomial in
of degree
. A vector
is said to be a root-vector of
f if
In 1891, Weierstrass [
1] established an iterative method for finding the root-vector of
f. The famous Weierstrass method is defined in
by the iteration:
where the Weierstrass correction
is defined as follows
Apparently, the domain of
is the set of the vectors in
with pairwise distinct components, that is, the set
Since 1960, the Weierstrass method (
1) has been rediscovered and studied by numerous authors and has became a powerful tool for constructing of new iterative methods for simultaneous finding of polynomial zeros (see, e.g., the monographs of Sendov, Andreev and Kyurkchiev [
2], Kyurkchiev [
3], Petković [
4] and references therein). In 1962, Dochev [
5] was the first who proved a theorem for local convergence of the Weierstrass method (
1). For a detailed convergence analysis and historical survey about the Weierstrass method (
1), we refer the reader to the papers [
6,
7,
8,
9,
10].
Recently, Nedzhibov [
11] established the following modification of the Weierstrass method:
where the iteration function
is defined by
where
is defined by (
2). This study deals with the convergence of the method (
4) which will be called modified Weierstrass method. Note that the domain of the iteration function
T is the set
Here and throughout the whole paper,
denotes the set of indices
, i.e.,
.
In what follows, for a given
p (
), we always define a number
q by
and for a given
n, we use the following denotations:
Note that
and
.
A local convergence analysis of the modified Weierstrass method (
4) was presented in the papers [
11,
12,
13,
14,
15,
16]. More detaily, in [
12] Nedzhibov proved the following convergence result:
Theorem 1 ([
12] (Theorem 3.6)).
Let be a monic polynomial of degree possessing only simple roots and such that . Let also be a root-vector of f and . Suppose is an initial approximation satisfyingwherethe numbers a, b are defined by (
7)
and the number θ is defined byThen the following statements hold true:- (i)
The modified Weierstrass iteration (
4)
is well defined and converges quadratically to the root-vector ξ of f. - (ii)
For all the following estimates holdwhere .
In [
13] the following theorem that enlarges the convergence domain and improves the error estimates of Theorem 1 in the case
was introduced:
Theorem 2. Let be a monic polynomial of degree possessing only simple roots and such that . Let be a root-vector of f and be an initial approximation satisfyingwhere is defined by (
9).
Then the modified Weierstrass iteration (
4)
is well defined and converges quadratically to the root-vector ξ of f with error estimateswhere . Remark 1. Actually, Theorem 2 was exposed in p-norm settings but the proof given in [13] is not correct since it is based on an incorrect inequality. Namely, the second inequality of ([13] Equation (20)) is not true for and , and , and etc. Here is the version of Theorem 2 stated in [
13].
Theorem 3 ([
13] (Theorem 2.6)).
Let be a monic polynomial of degree possessing only simple roots and such that . Let also be a root-vector of f and . Suppose is an initial approximation satisfyingwhere is defined by (
9)
and the quantities are defined by (
7).
Then the modified Weierstrass iteration (
4)
is well defined and converges quadratically to the root-vector ξ of f with error estimates (
11),
where . Under the assumptions of Theorem 2 an assessment of the asymptotic error constant of the modified Weierstrass iteration (
4) was provided in the following convergence theorem:
Theorem 4 ([
16] (Theorem 1)).
Let the assumptions of Theorem 2 are fulfilled. Then the following estimate of the asymptotic error constant holds: Very recently, based on the methods of [
17] and Theorem 2 the following convergence theorem has been obtained in [
14].
Theorem 5 ([
14] (Theorem 4)).
Let be a monic polynomial of degree . Suppose there exists a vector with distinct nonzero components such thatwhere is defined by (
9)
and . Then f has only simple zeros and the iteration (
4)
is well defined and converges quadratically to the root-vector ξ of f with error estimates (
13).
It is important to note that Theorem 1 and Theorem 2 are independent. Theorem 5 as well as the results of [
11] and [
14] are direct consequences of Theorem 2. On the other hand, in the case
, Theorem 4 generalizes and improves Theorem 1 of [
15]. In other words, the above presented theorems (Theorems 1–5) cover all existing results about the modified Weierstrass method (
4) except Theorem 1 of [
15] in the case
.
In this paper, we obtain a local convergence theorem (Theorem 7) that improves and complements all above mentioned theorems (Theorems 1–5) including Theorem 1 of [
15] in the case
. Furthermore, in
Section 4 we prove a semilocal convergence theorem (Theorem 9) that improves and complements Theorem 5. In
Section 5, we provide some numerical experiments to show the applicability of our semilocal convergence result. Finally, in
Section 6 we provide theoretical end numerical comparisons that show the superiority of the classical Weierstrass method (
1) over the modified Weierstrass method (
4) in all considered aspects.
2. Preliminaries
Recently, Proinov [
6,
17,
18,
19,
20] has developed a general convergence theory of the Picard type methods. The main role in the theory is played by a real-valued function called function of initial conditions of an iteration function
T (Definition 3). Some implementations of this theory by using different functions of initial conditions can be found in [
7,
8,
9,
21,
22,
23,
24,
25,
26,
27,
28,
29].
The main aim of this section is to recall some definitions and theorems of Proinov [
6,
19] which are crucial for the proof of our results in this paper. First of all, we equip
with a coordinate-wise (partial) ordering
defined by
Furthermore, with
J we denote an interval on
containing 0 and we assume by definition that
. We denote by
the sum of the first
k terms of the sequence
, i.e., for all
, we have
In the case
, we set
.
Definition 1 ([
19] (Definition 2.1)).
A function is called quasi-homogeneous of degree if it is such that for all and . Recall some useful properties of the quasi-homogeneous functions [
19].
A function is quasi-homogeneous of degree on an interval J if and only if is nondecreasing on J;
If and are quasi-homogeneous of degree on J, then is also quasi-homogeneous of degree r on J;
If and are quasi-homogeneous of degree and on J, then is quasi-homogeneous of degree on J.
Proposition 1 ([
6] (Example 2.2)).
Let and is a quasi-homogeneous function of degree on some interval J, then the following function:is quasi-homogeneous of the same degree r on J. Definition 2 ([
19] (Definition 2.4)).
A function is called a gauge function of order on J if it fulfills the following conditions:- (i)
φ is a quasi-homogeneous function of degree r on J;
- (ii)
for all .
A gauge function φ of order r on J is called a strict gauge function if the last inequality holds strictly on .
The following result gives a simple sufficient condition for gauge functions of order r.
Proposition 2 ([
19]).
If is a quasi-homogeneous function of degree on some interval J and is a fixed point of φ in J, then φ is a gauge function of order r on the interval . Besides, if , then φ is a strict gauge function of order r on . Definition 3 ([
19] (Definition 3.1)).
Let X be an arbitrary set and . A function is called a function of initial conditions of T (with a gauge function φ on an interval J) if there is a function such that Definition 4 ([
19] (Definition 3.2)).
Let X be an arbitrary set and . Suppose is a function of initial conditions of T (with gauge function on an interval J). Then a point is called an initial point of T if and all of the iterates are well defined and belong to D. We shall use the following proposition as a detector for initial points.
Proposition 3 ([
19] (Proposition 4.1)).
Let X be an arbitrary set, and be a function of initial conditions of T with a gauge function φ on J. Assume thatThen every point such that is an initial point of T. Definition 5 ([
6] (Definition 3.1)).
Let be a map in a cone normed space over a solid vector space and be a function of initial conditions of T with a gauge function on an interval J. Then T is called an iterated contraction with respect to E at a point (with control function ϕ) if andwhere is a nondecreasing function. To prove our main theorem, we shall use the following general local convergence result of Proinov [
6].
Theorem 6 ([
6] (Corollary 3.4)).
Let be a map in a cone normed space over a solid vector space and be a function of initial conditions of T with a strict gauge function φ of order r on some interval J. If T is an iterated contraction with respect to E at a point ξ with control function ϕ such that for all , then for every initial point of T the Picard iteration (
4)
remains in the set and converges to ξ with error estimatesfor all , where . 3. Local Convergence Analysis
Let
be a polynomial of degree
with
n simple roots in
and such that
and let
be a root-vector of
f. Afterwards, we define the function
by
and the function
by
Also, for two vectors
and
we use the denotation
for the vector in
defined by
provided that
y has only nonzero components.
In the present section, we study the convergence of the modified Weierstrass method (
4) regarding the function of initial conditions
defined by
Note that, according to (
9) and (
20) we have
and therefore
We start this section with two technical lemmas that will be used in the proofs of the forthcoming results.
Lemma 1 ([
6] (Proposition 5.5)).
Let and . Then the following inequalities hold: Lemma 2 ([
6] (Lemma 6.1)).
Let , vector ξ be with distinct components and . Then for ,where b is defined by (
7)
and is defined by (
21).
In what follows, for
, we define the functions
and
by
where
a and
b are defined by (
7) and
is the unique solution of the equation
in the interval
. The existence and uniqueness of
follow from the fact that the left hand side of (
24) is decreasing function that maps
onto
. It must also be noted that the function
is quasi-homogeneous of the first degree on the interval
, pursuant to Proposition 1 and the last two of the aforementioned properties.
The main aim of the next lemma is to show that the function
E defined by (
21) is a function of initial conditions of the modified Weierstrass iteration function
T defined by (
5) as well as that the function
T is an iterated contraction at
with respect to
E.
Lemma 3. Let be a polynomial of degree with n simple roots in and such that , be a root-vector of f and . Let be such thatwhere the functions E is defined by (
21)
and τ is the unique solution of the Equation (
24)
in the interval , where b is defined by (
7).
Then the following statements hold: - (i)
, where D is defined by (
6);
- (ii)
, where ϕ is defined by (
23);
- (iii)
, where the real function φ is defined by .
Proof. (i) We note that the first inequality of Lemma 2 and
imply that
. Let
be fixed. According to (
6), we have to prove that
From the triangle inequality and
, we get
From the definition of
, we have
Observe that from the first inequality of Lemma 2, we get
So, from (
28), using the first inequality of Lemma 1 with
and the second inequality of (
29), we get
Now, from the triangle inequality, (
27), (
30) and
, we obtain
which proves (
26).
(ii) We ought to prove that
for each
. If
for some
i, then (
31) becomes an equality. Suppose
. In this case, from (
27) and (
30), we get the following estimate:
From this and (
25), we obtain
So, from (
5), we obtain
where
is defined by
Pursuant to (
34), to complete the proof of (
31) it remains to estimate
from above. In order to do this, we use the second inequality of Lemma 1 with
, (
28) and (
29), and thus we reach the following estimate:
Hence, from (
35), using the triangle inequality and the estimates (
32), (
33) and (
36), we obtain
which together with (
34) leads to (
31) which proves (ii).
Finally, dividing both sides of (
31) by
and taking
p-norm, we get the inequality (iii) which completes the proof of the lemma. ☐
For the proposes of the main result, we define the function
by
where
a and
b are defined by (
7) and
is defined by (
23).
The following theorem is the first main convergence result of this paper.
Theorem 7. Let be a polynomial of degree possessing n simple roots in and such that , be a root-vector of f and . Suppose is an initial approximation satisfyingwhere the real function Φ
is defined by (
38).
Then the following statements hold: - (i)
The modified Weierstrass iteration (
4)
is well defined and converges quadratically to ξ. - (ii)
For all , we have the following error estimateswhere with ϕ defined by (
23).
- (iii)
If for sufficiently large k, then we have the following estimate of the asymptotic error constant:where is defined by (
9).
Proof. We shall apply Theorem 6 to the iteration function
defined by (
5), the function
defined by (
21) and the function
, where
is defined by (
23).
It is easy to verify that
with
is equivalent to
, where
is the unique solution of the Equation (
24) in the interval
. So, (
39) allows us to apply Lemma 3. Let
R be the unique solution of
in the interval
. The existence and uniqueness of
R follow from the fact that
is a continuous and strictly increasing function that maps
onto
. Since
is quasi-homogeneous of the first degree on the interval
, then the function
defined by
is quasi-homogeneous of second degree on
. Also, we have
, i.e.,
R is a fixed point of the function
in the interval
. According to Proposition 2, this means that
is a strict gauge function of order
on
. Hence, by Lemma 3 (iii), we deduce that
E is a function of initial conditions of
T. Since
, then from Lemma 3 (ii) and Definition 5 it follows that
T is an iterated contraction with respect to
E at
with control function
defined by (
23).
Further, applying Lemma 3 (i) to , we get . Let be such that . We have , inasmuch as . Since is a gauge function of order on J, then by Lemma 3 (iii), we get which means that . Thus we have both and . So, applying Lemma 3 (i) to , we conclude that . According to Proposition 3, is an initial point of T. Consequently, the conclusions (i) and (ii) of Theorem 7 follow from Theorem 6.
It remains to prove the estimate (
41). Since the function
defined by (
23) is quasi-homogeneous of the first degree on the interval
, then the function
is nondecreasing on
(see [
19] (Lemma 2.2)). So, according to Lemma 3 (ii) and the inequality (
22), we obtain
Dividing both sides of this inequality by
and taking lim sup, we get
Further, according to the definitions of
and
, we get the following limit:
Hence, taking into account that
as
, from (
42), we obtain (
41) which completes the proof of the theorem. ☐
The following corollary of Theorem 7 improves and complements Theorem 1.
Corollary 1. Let be a polynomial of degree with n simple roots in and such that . Let be a root-vector of f and . Suppose is an initial approximation satisfyingwhere are defined by (
7)
and the number h is defined byThen the iterative sequence (
4)
is well defined and converges quadratically to ξ with error estimates (
40)
and (
41).
Proof. We ought to prove that
satisfies (
39). The first inequality of (
39) is satisfied because of the inequality
. Since the function
defined by (
38) is strictly increasing on the interval
, then to prove the second inequality of (
39) it is sufficient to show that
. First, we note that
R is the unique solution of the equation
in the interval
, where
h is defined by (
44). So, applying Bernoulli’s inequality, we get
From this, we obtain the following inequality:
On the other hand,
h is the unique positive root of the equation
Therefore, we have the following identity:
From this, the definition of the function
and the inequality (
46), we get
which completes the proof. ☐
Comparison between Theorem 7 and Theorem 1. We shall prove that Corollary 1 improves Theorem 1 in the following two directions:
First, Corollary 1 gives a larger convergence domain, i.e., every vector that satisfies the initial condition (
8)
satisfies (
43)
but not vice versa. This claim follows from the inequalities (
22)
and . The last inequality is equivalent to which in turn follows from the fact that is strictly increasing for and when . Second, Corollary 1 provides better error estimates. Indeed, according to (
43)
the error estimates (
11)
follow from (
40)
because of the inequality . To prove the last inequality, we define R as the unique solution of in the interval , where the function is defined by (
23).
Recall that such R exists (see the proof of Theorem 7). Since, the function ϕ is quasi-homogeneous of the first degree on the interval , then according to the increasement of on (see [19]), the inequalities (
22), (
43)
and , we get Corollary 1 complements Theorem 1 with the estimate (
41).
In the case from Theorem 7, we obtain the following result:
Corollary 2. Let be a polynomial of degree with n simple roots in such that and be a root-vector of f. Suppose is an initial approximation satisfyingwhere the real function Φ
is defined by Then the modified Weierstrass iteration (
4)
is well defined and converges quadratically to ξ with error estimates (
40),
where with ϕ defined by (
23)
but with and . Also, for all , we have the estimate of the asymptotic error constant (
15).
Comparison between Theorem 7 and Theorem 2 and 4. First, we shall prove that Corollary 2 gives a larger convergence domain than Theorem 2. To do this, we have to show that the initial condition (
12)
implies (
48),
i.e., we have to show that and , where ν is defined by (
12)
and the function Φ is defined by (
49).
The first inequality is obvious and the second one is equivalent to the inequalitywhich holds for all . Really, putting in the last inequality, we get the inequalitywhich obviously holds for all . Second, according to (
48)
the error estimates (
13)
follow from (
40)
due to the inequality (see the anterior comparison) Theorem 7 gives a better assessment of the asymptotic error constant (
41)
than Theorem 4 owing to the inequality for all and . In what follows, we give a computer-assisted proof that Theorem 7 improves and complements even Theorem 3.
Comparison between Theorem 7 and Theorem 3. To prove that Theorem 7 gives a larger convergence domain, we ought to show that and , where the function Φ
is defined by (
38).
The first inequality is obvious. We shall prove the second one graphically. It is easy to verify that it is equivalent to the inequalitywhere a and b are defined by (
7).
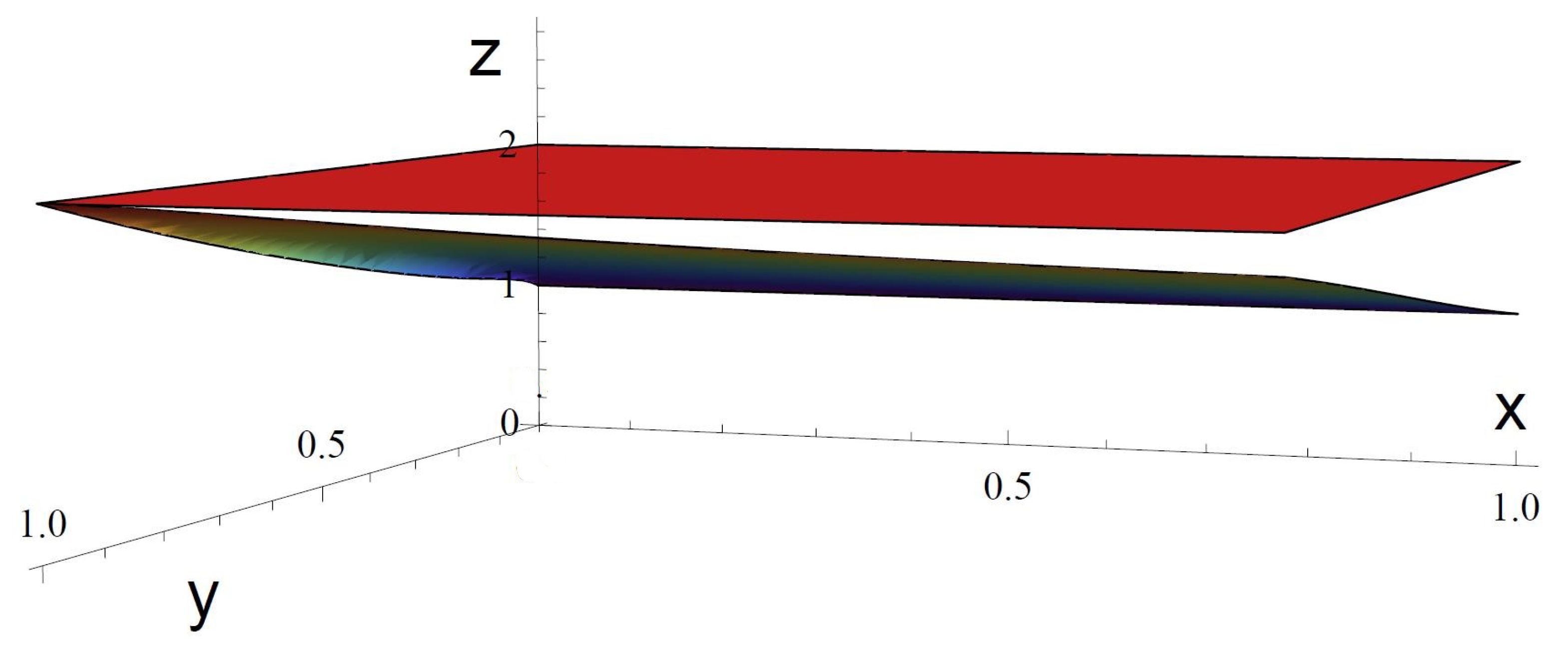
Setting and in the last inequality, we get the inequality , where the function is defined by The graph of the function is exhibited on Figure 1. One can see that the graph of G is beneath the plane for all . Hence, we have which implies and therefore the initial condition (
14)
implies (
39).
The error estimates of Theorem 3 follow immediately from (
40)
owing to the inequality (see the anterior comparison) Theorem 7 complements Theorem 3 with the assessment (
41).
4. Semilocal Convergence Analysis
Let
be a polynomial of degree
. In the present section, we establish a new semilocal convergence result for the modified Weierstrass method (
4) that generalizes and improves Theorem 5. We study the convergence of the iteration (
4) regarding the function of initial conditions
defined as follows
where
is defined by (
20) and
is Weierstrass correction defined by (
2). Observe that the domain
of
is the set
Recently, Proinov [
17] showed that from any local convergence theorem about a simultaneous method one can obtains a semilocal convergence theorem about the same method. He classified the initial conditions into three types (see [
17] (Definition 2.1)) and showed how initial conditions of the first and the second type (which are of rather theoretical importance) can be transformed into initial conditions of the third type that are of significant practical importance. Now, we note that all results of [
17] remain true if one replaces the function
d defined by (
19) with the function
defined by (
20) (see also [
17] (Remark 2.2)). This means that we can apply the results of [
17] to the functions
E and
defined by (
21) and (
51) as well. In what follows, we transform our Corollary 1 into a semilocal convergence theorem (Theorem 9) using the following version of Theorem 6.1 of Proinov [
17]:
Theorem 8. Let be a polynomial of degree , and let there exists a vector with distinct components such thatfor some and , where a and b are defined by (
7)
and is the Weierstrass correction defined by (
2).
Then f has only simple zeros and there exists a root-vector of f which satisfies For the purposes of our next result, we define a distance
between two vectors
by (see, e.g., [
10]):
where the binary relation
is defined on
as follows:
if there exists a permutation
of the indexes
such that
.
Now we are ready to state and prove the third main result of this paper. It is a theorem of significant practical importance since the initial condition and the error estimate are computationally verifiable.
Theorem 9. Let be a polynomial of degree , and let be an initial approximation with pairwise distinct nonzero components satisfyingfor some , where is the Weierstrass correction defined by (
2)
and the number R is defined by (
43).
Then the following statements hold true: - (i)
The polynomial f possess only simple zeros in .
- (ii)
The iteration (
4)
is well defined and converges quadratically to a root-vector ξ of f. - (iii)
For all such that , we have the following a posteriori error estimatewhere the function is defined by and the real function α is defined by
Proof. Since
, then from (
54) and Theorem 8 it follows that
f possess only simple zeros and there exists a root-vector
of
f such that
From this and Corollary 1 it follows that the iteration (
4) is well defined and converges quadratically to a root-vector
of
f. The estimate (
55) follows from Theorem 5.1 of [
17]. ☐
Remark 2. In the case , Theorem 9 gives a larger convergence domain than Theorem 5. Indeed, the initial condition (
16)
implies (
54)
due to the inequalities andMoreover, Theorem 9 provides a computationally verifiable error estimate unlike Theorem 5. 5. Applications
In this section, we show the applicability of our semilocal convergence result (Theorem 9). Our main aim is to show that Theorem 9 can be used for solving of two important practical problems: (i) numerical proof of the convergence of the modified Weierstrass method (
4) and (ii) numerical proof of the accuracy of approximation at any iteration. For the sake of convenience, we consider the case
.
Suppose
is a polynomial of degree
and
is an initial approximation. We apply the modified Weierstrass method (
4) for computing all the zeros of
f simultaneously. Applying Theorem 9 to
instead of
, we get the following convergence criterion:
Convergence criterion. If there exists an integer for whichwhere is defined by (
20),
is the Weierstrass correction defined by (
2)
and the number is defined bythen f has only simple zeros in and the iteration (
4)
is well-defined and is quadratically convergent to a root-vector ξ of f. Next, applying Theorem 9 (iii) to instead of , we get the following accuracy criterion:
Accuracy criterion. If for a preset accuracy there exists an integer for whichwhere the function is defined by (
19)
andwith α defined by (
56)
with , then the root-vector ξ of f is calculated with accuracy ε. Besides, the accuracy is guaranteed at the kth iteration. Henceforward, we consider the following polynomials ([
5,
9,
23,
30,
31]):
with Aberth’s initial approximation
defined by ([
32])
where
is randomly chosen from the interval (2, 1576) while
and
n are the second coefficient and the degree of the corresponding polynomial. For any of the polynomials, we calculate the smallest integer
that fulfills the convergence criterion (
57) and the smallest integer
that satisfies the accuracy criterion (
59) with accuracy
. The values of
m,
and
are given in
Table 1 with at least six decimal digits. For instance, one can see from the table that for
the convergence criterion (
57) is fulfilled at twelfth step. On the other hand, for
, at the fourteenth step the MWM is not well defined. Besides,
.
In
Table 2, we exhibit the values of
k,
,
and
. It is seen from the table that for
the accuracy criterion (
59) is satisfied for
and the roots are found with guaranteed accuracy less than
.





{kind=link}