Investigation of Snake Robot Locomotion Possibilities in a Pipe

 ,
, 
 , , ,
, , ,  , and
, and
Abstract
1. Introduction
2. Review of Snake Robot Applications in a Pipe
3. Design and Analysis of Locomotion Pattern in a Pipe
4. Simulation of Locomotion
5. Development of Experimental Snake Robot
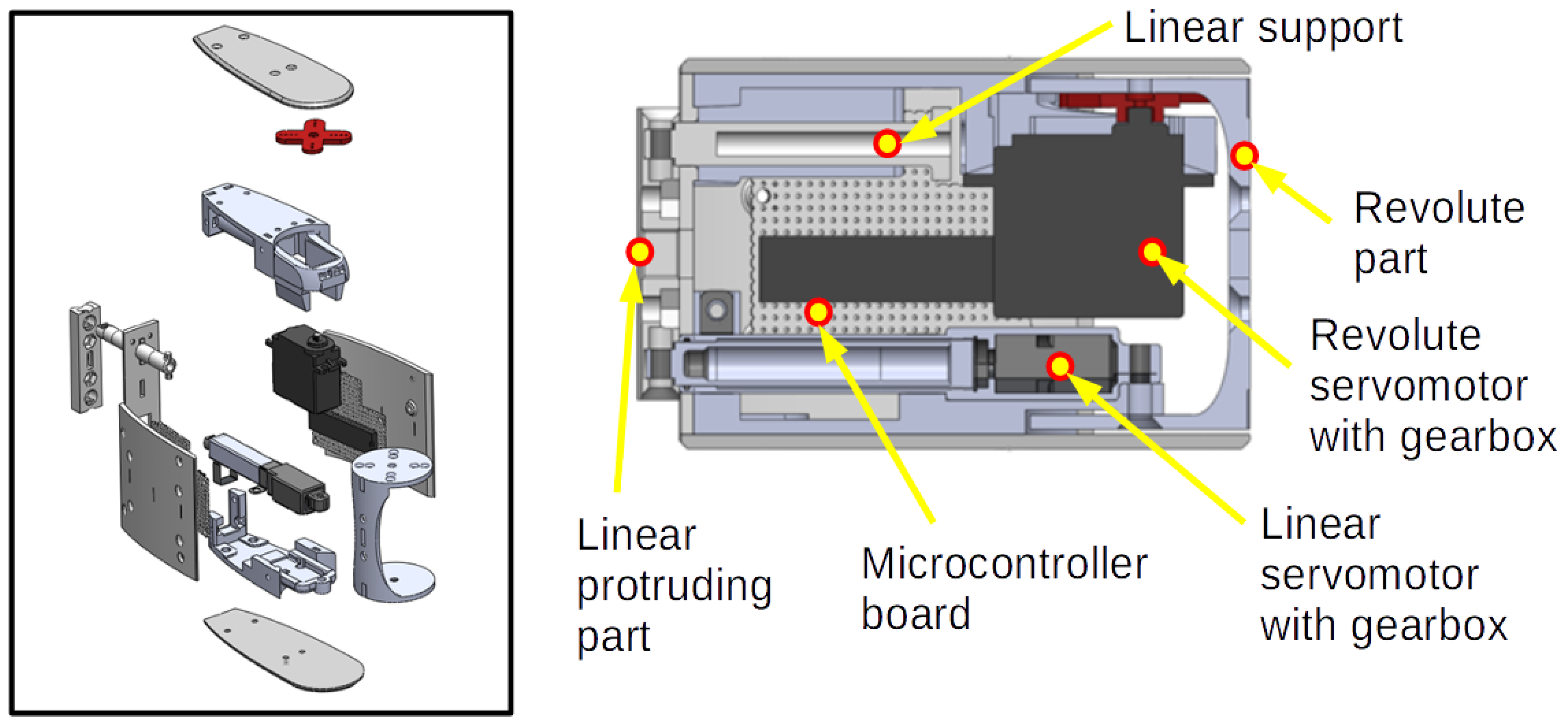
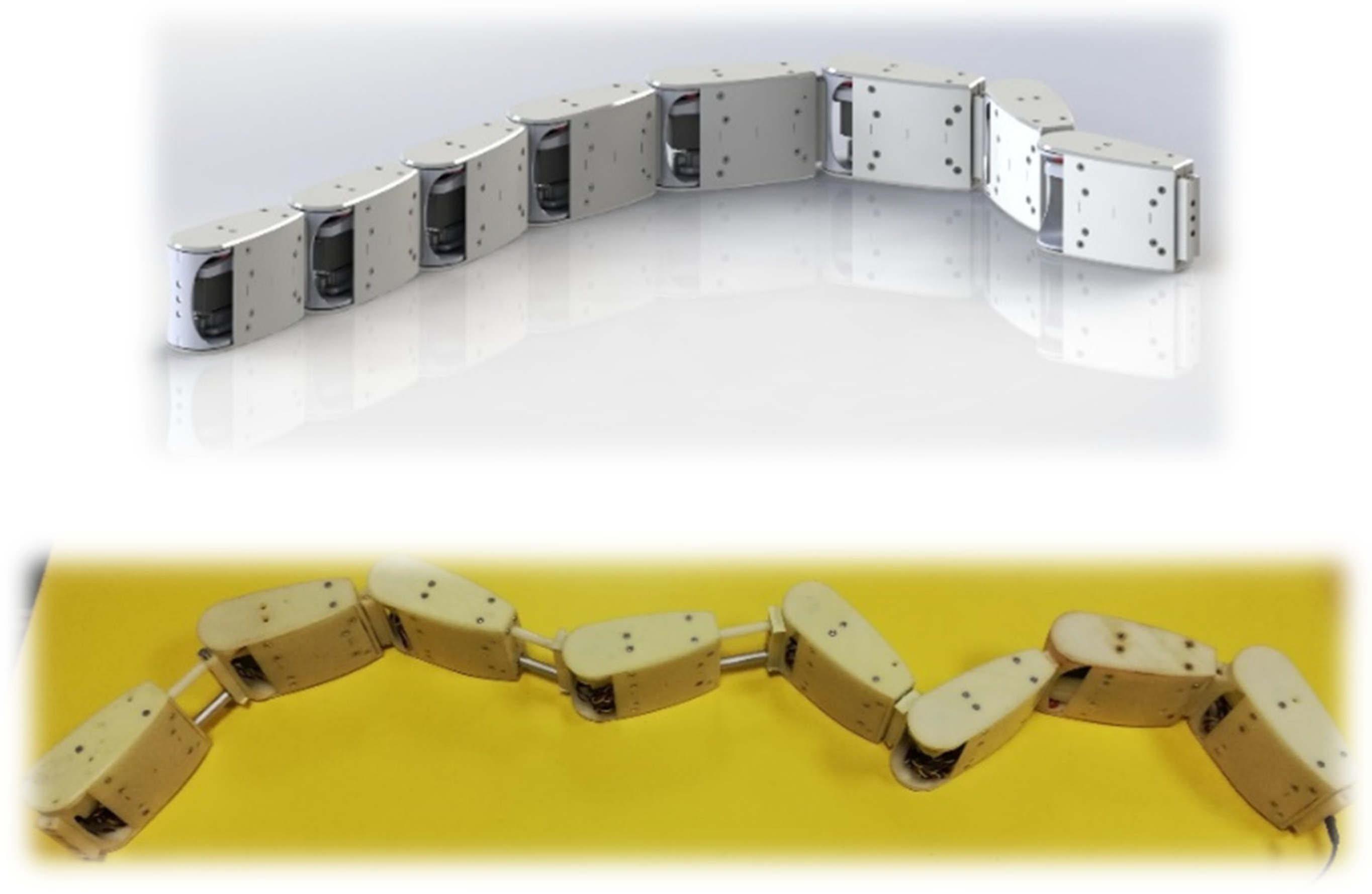
5.1. Mechanical Design of Snake Robot
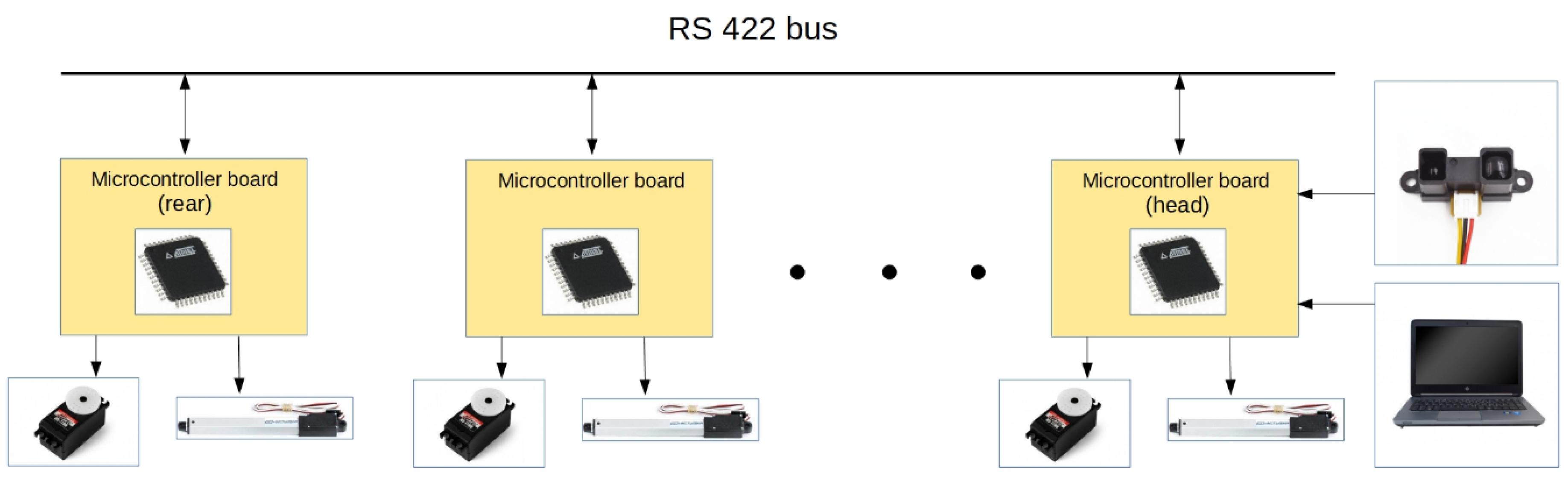
5.2. Electrical and Control System of Snake Robot
6. Experiments with Snake Robot in a Pipe
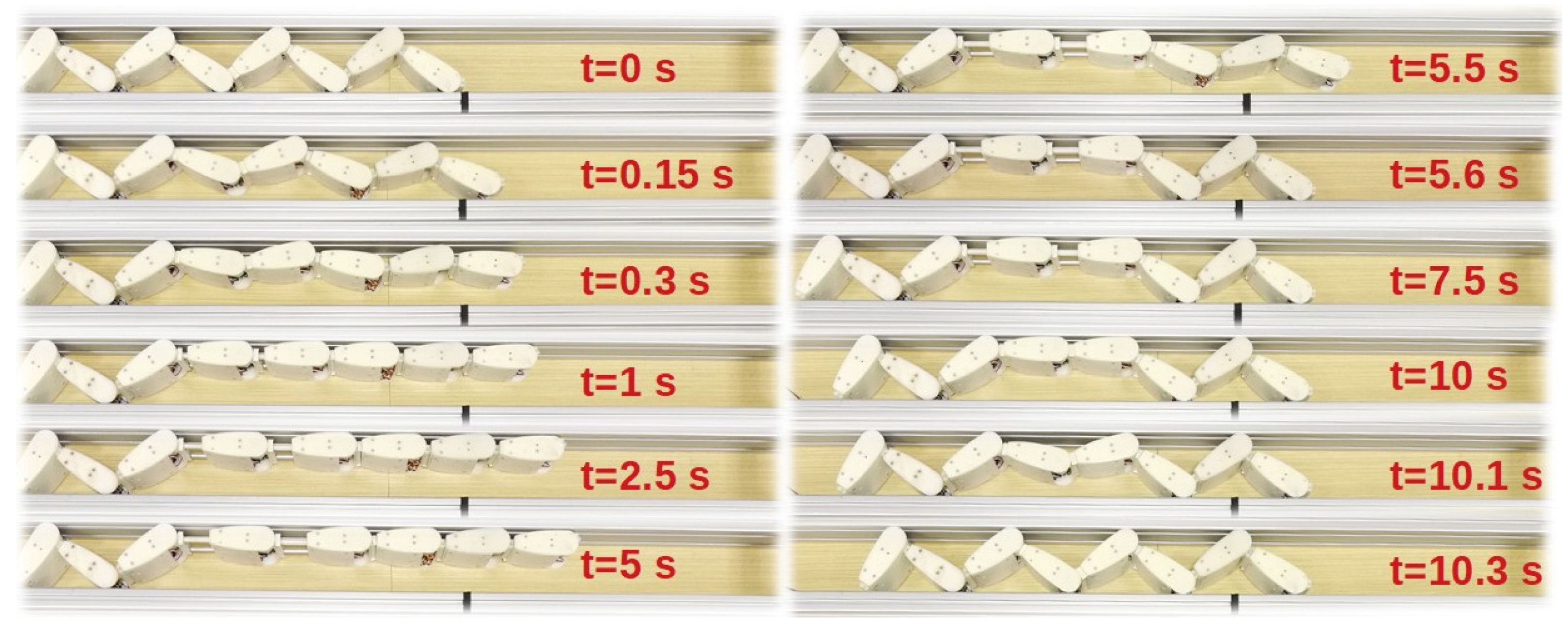
6.1. Locomotion Pattern in a Pipe
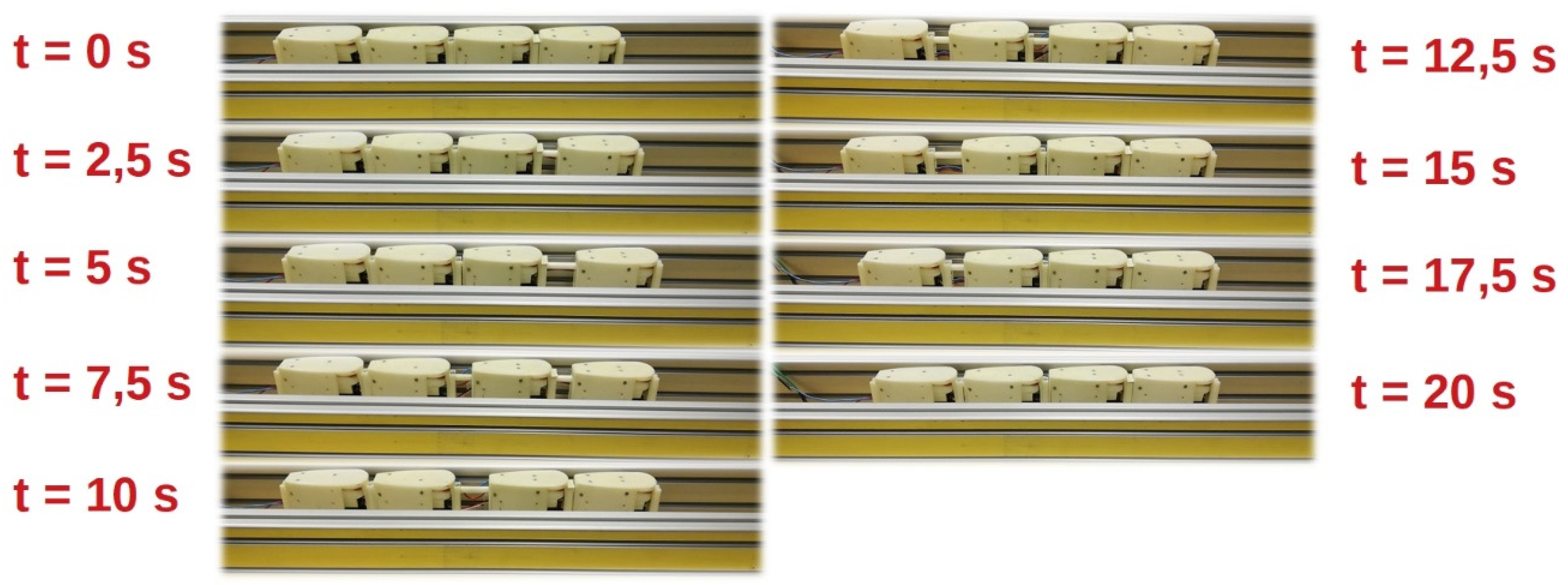
6.2. Locomotion on Different Surfaces
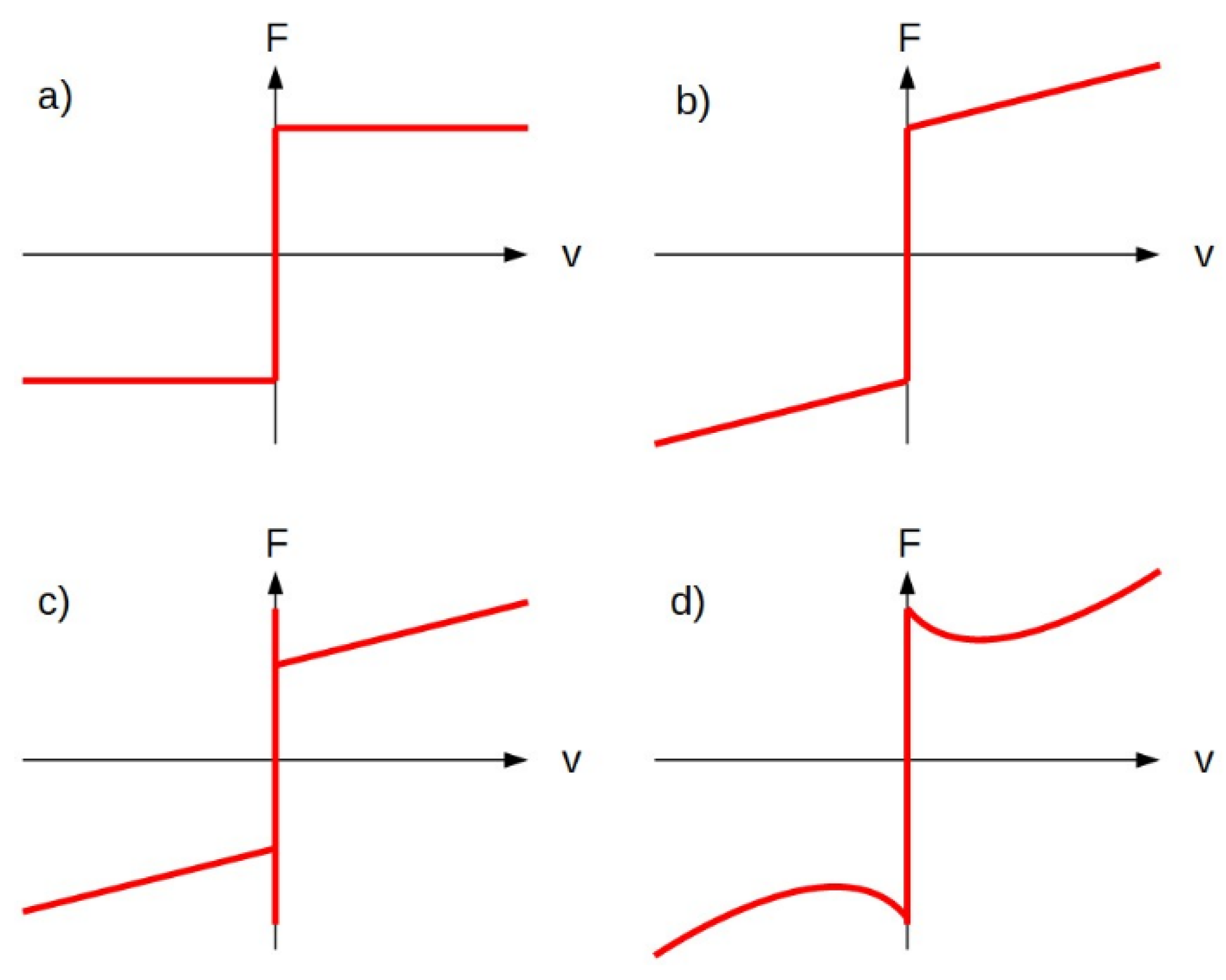
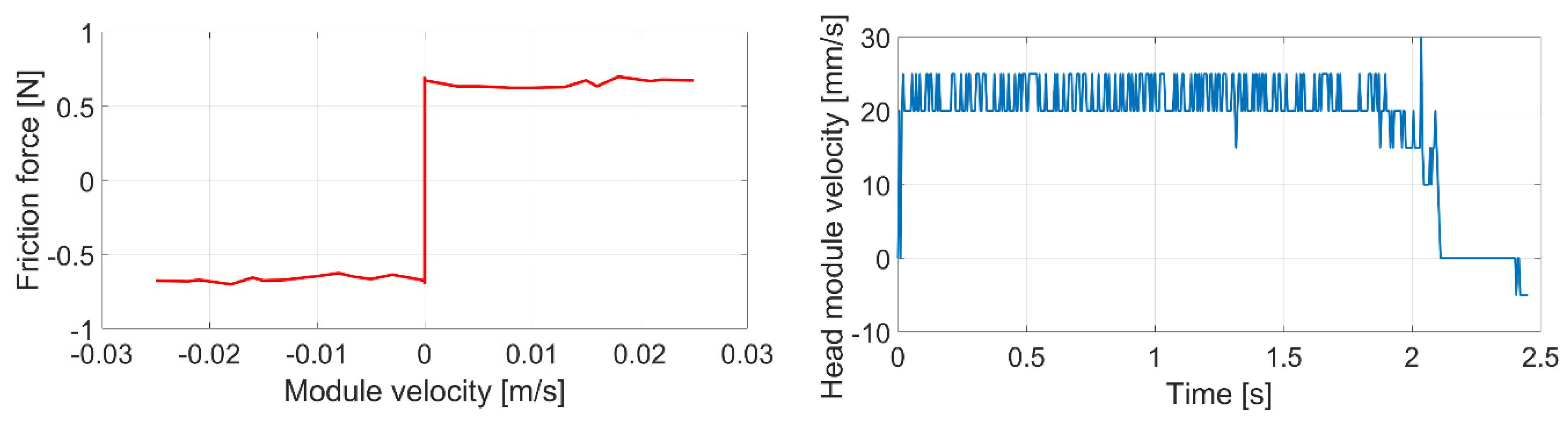
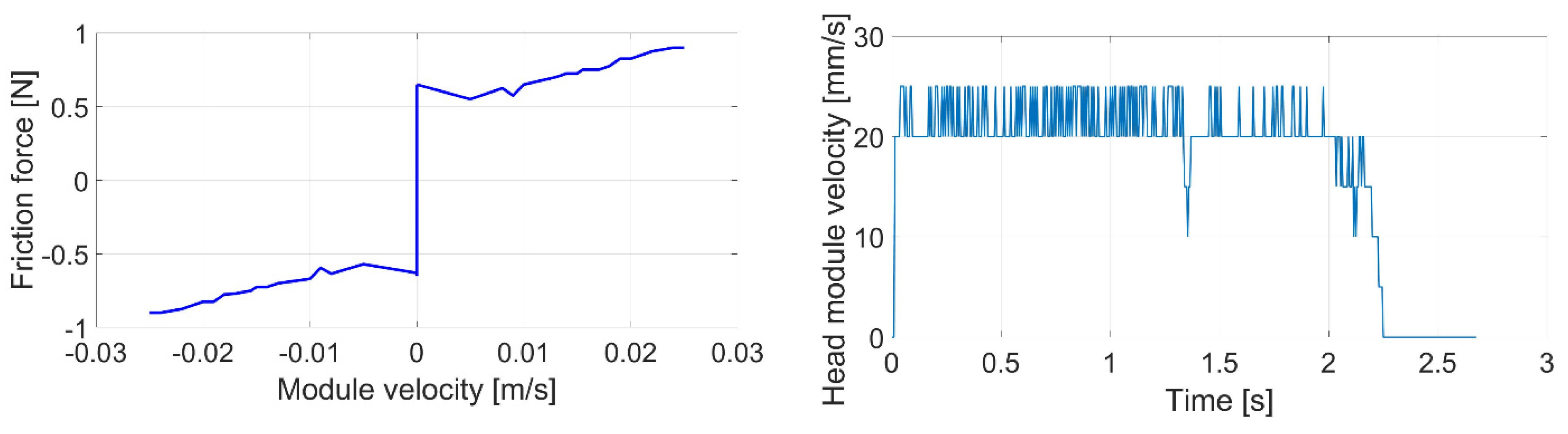
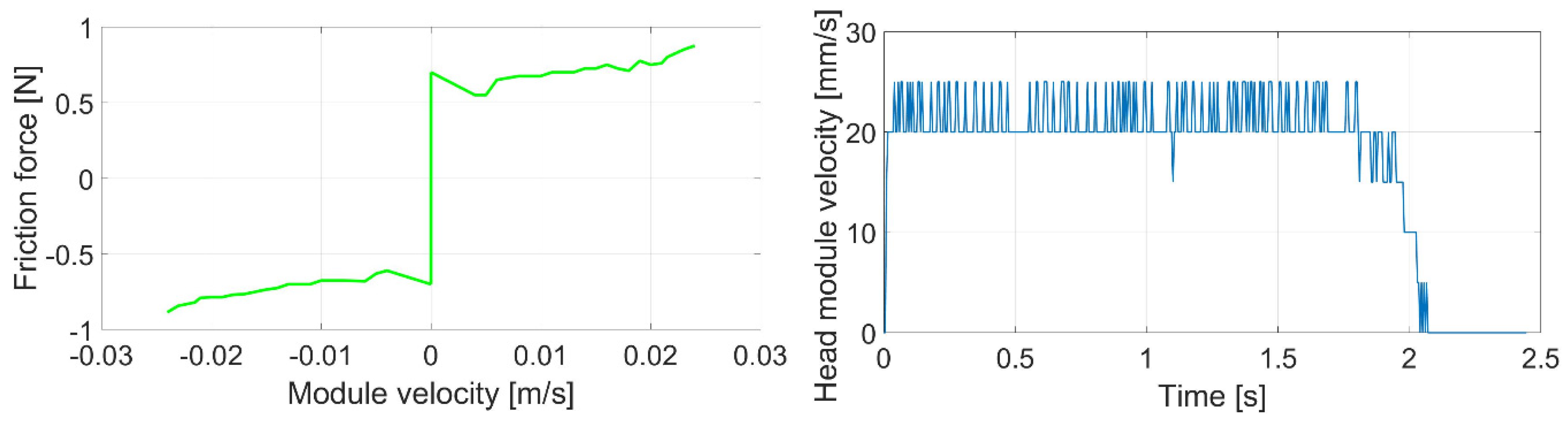
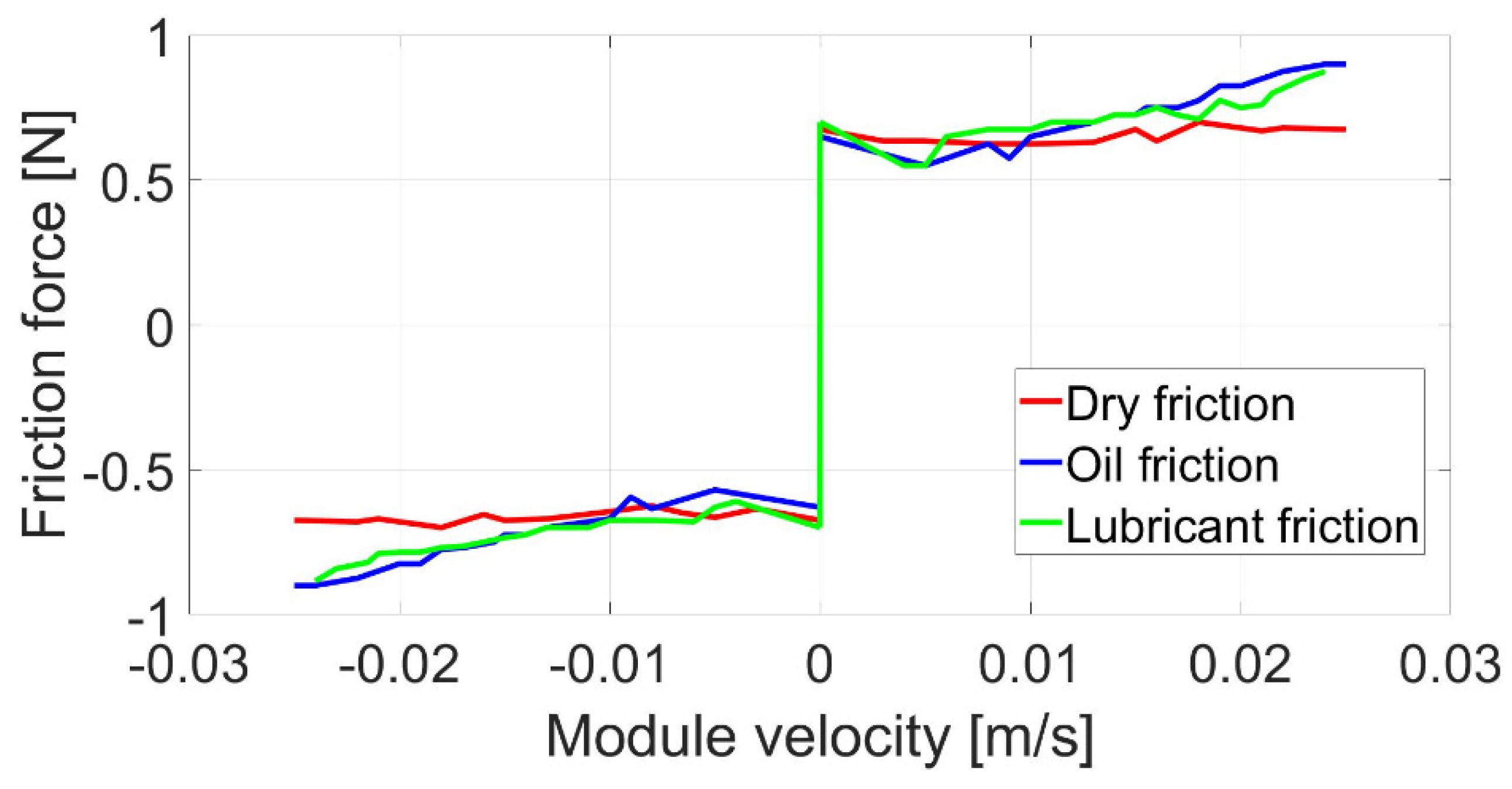
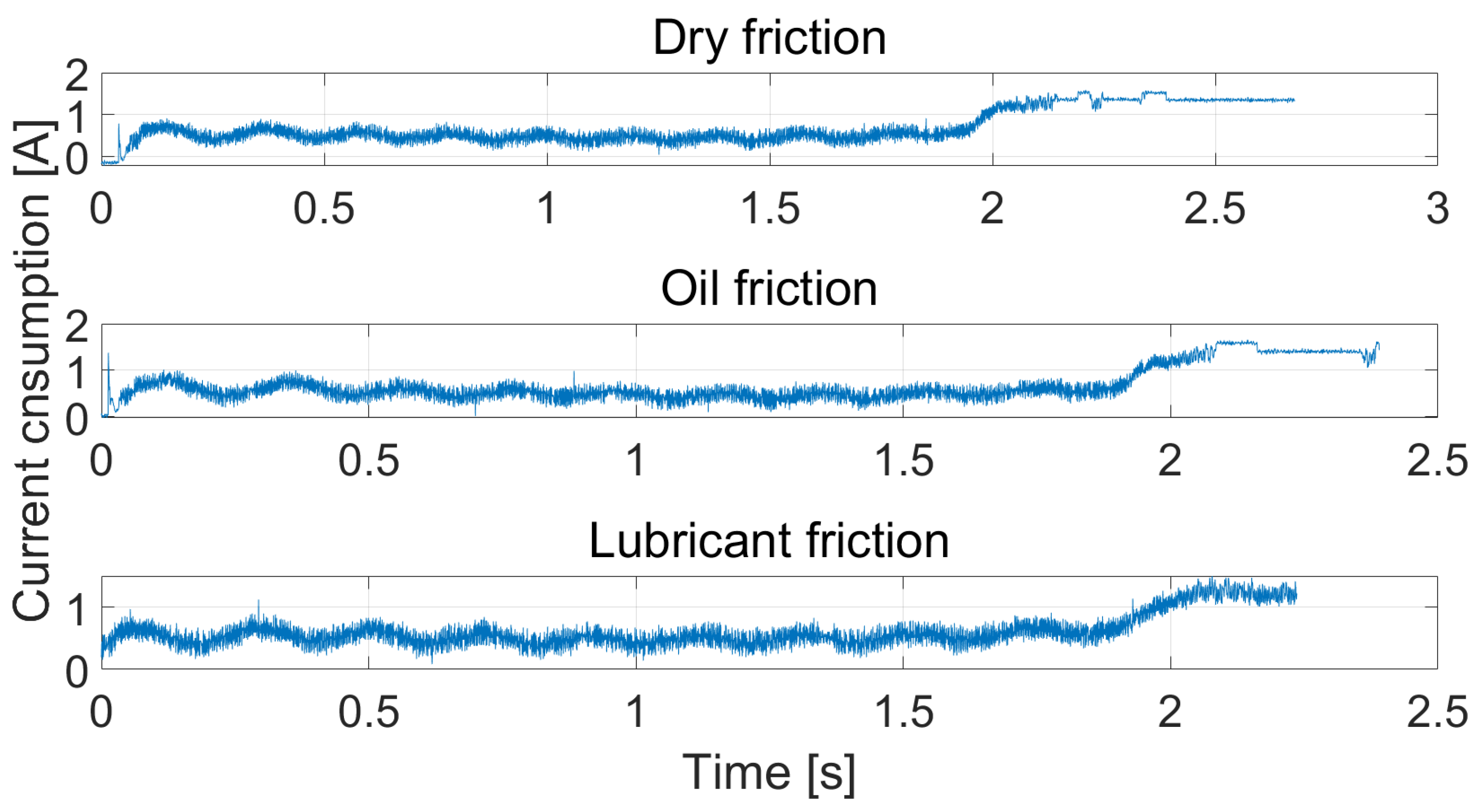
6.2.1. Friction Models
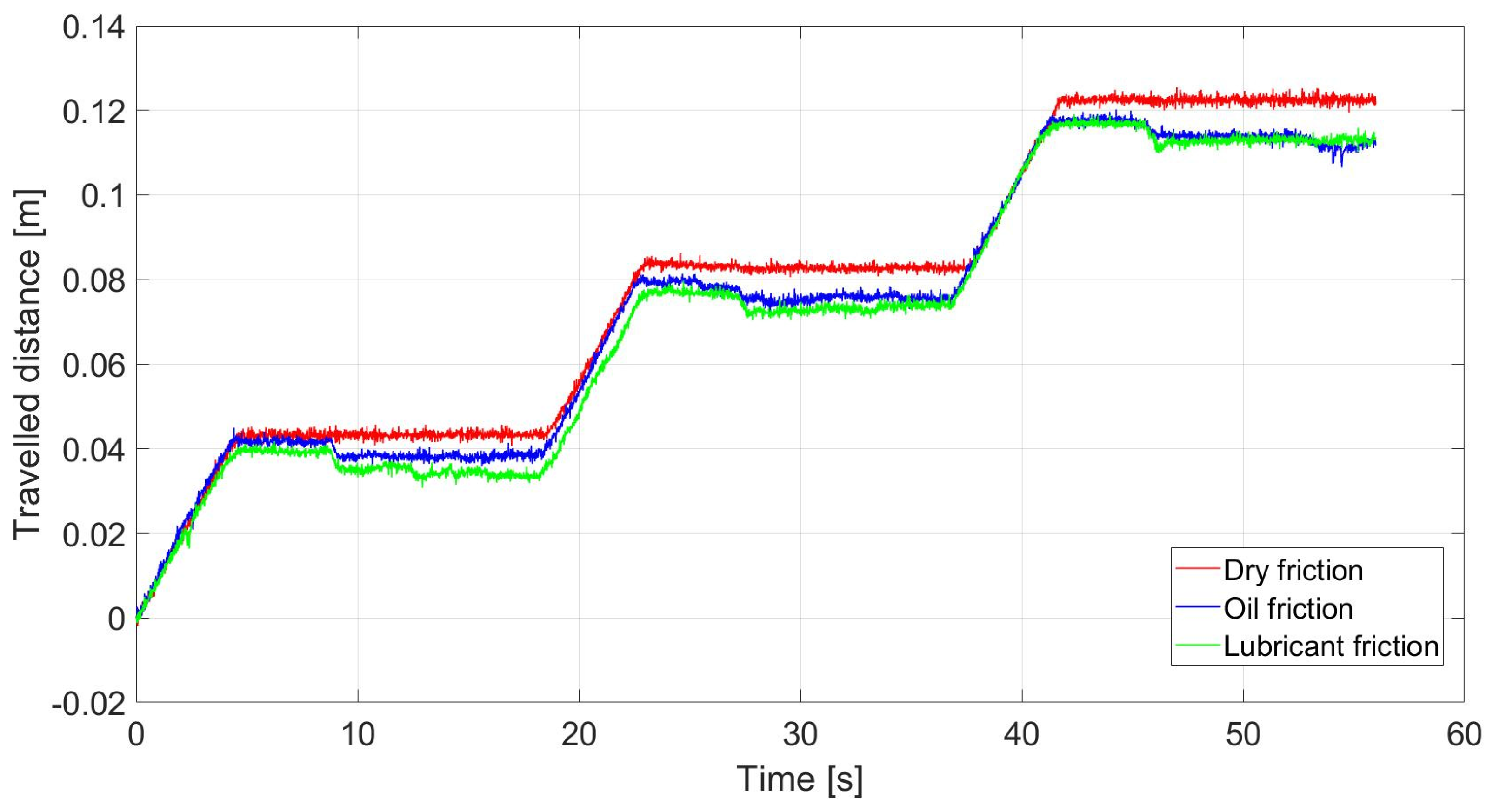
6.2.2. Testing of Locomotion on Different Kinds of Surfaces
6.3. Experimental Analysis of Stability
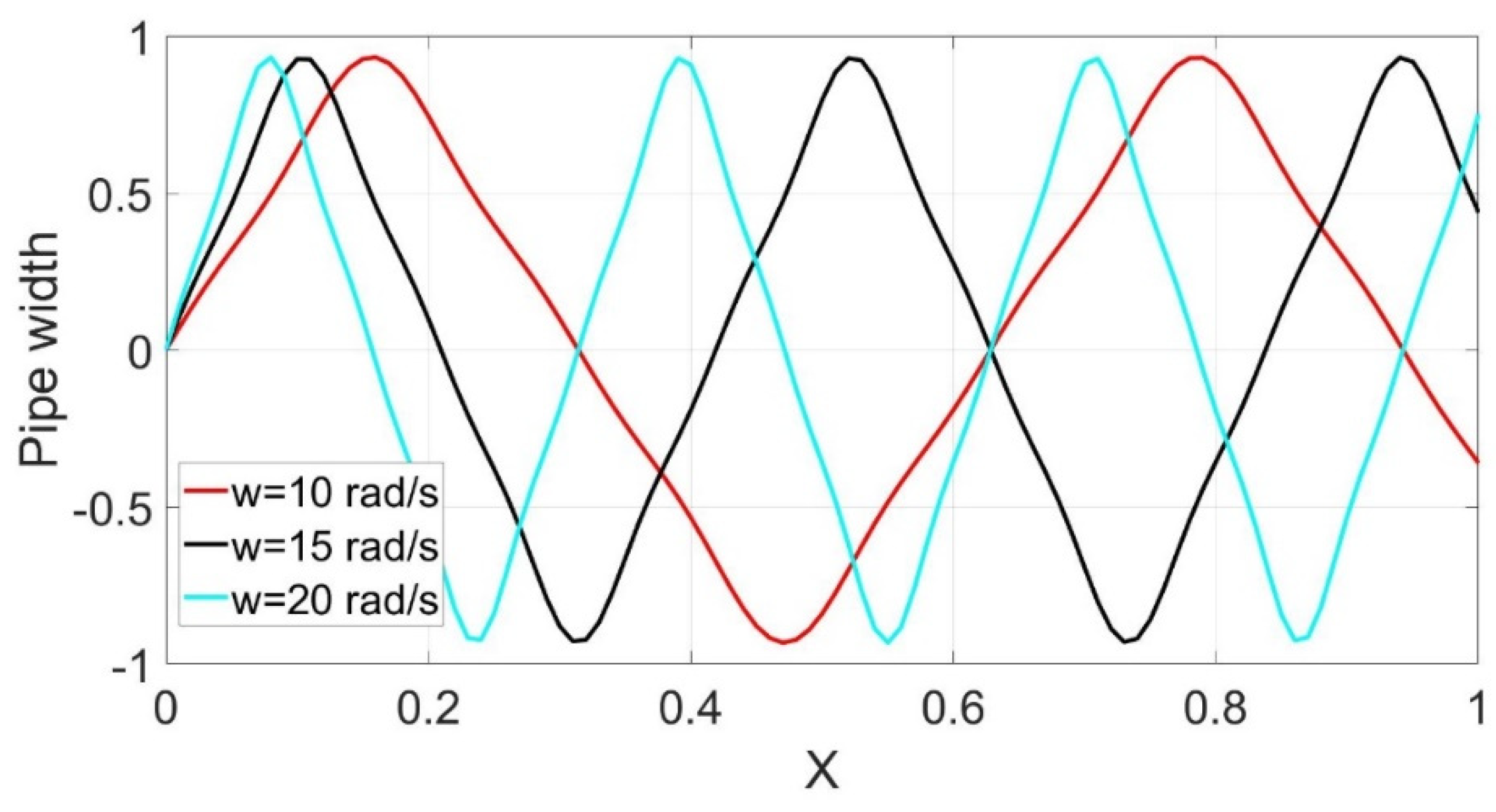
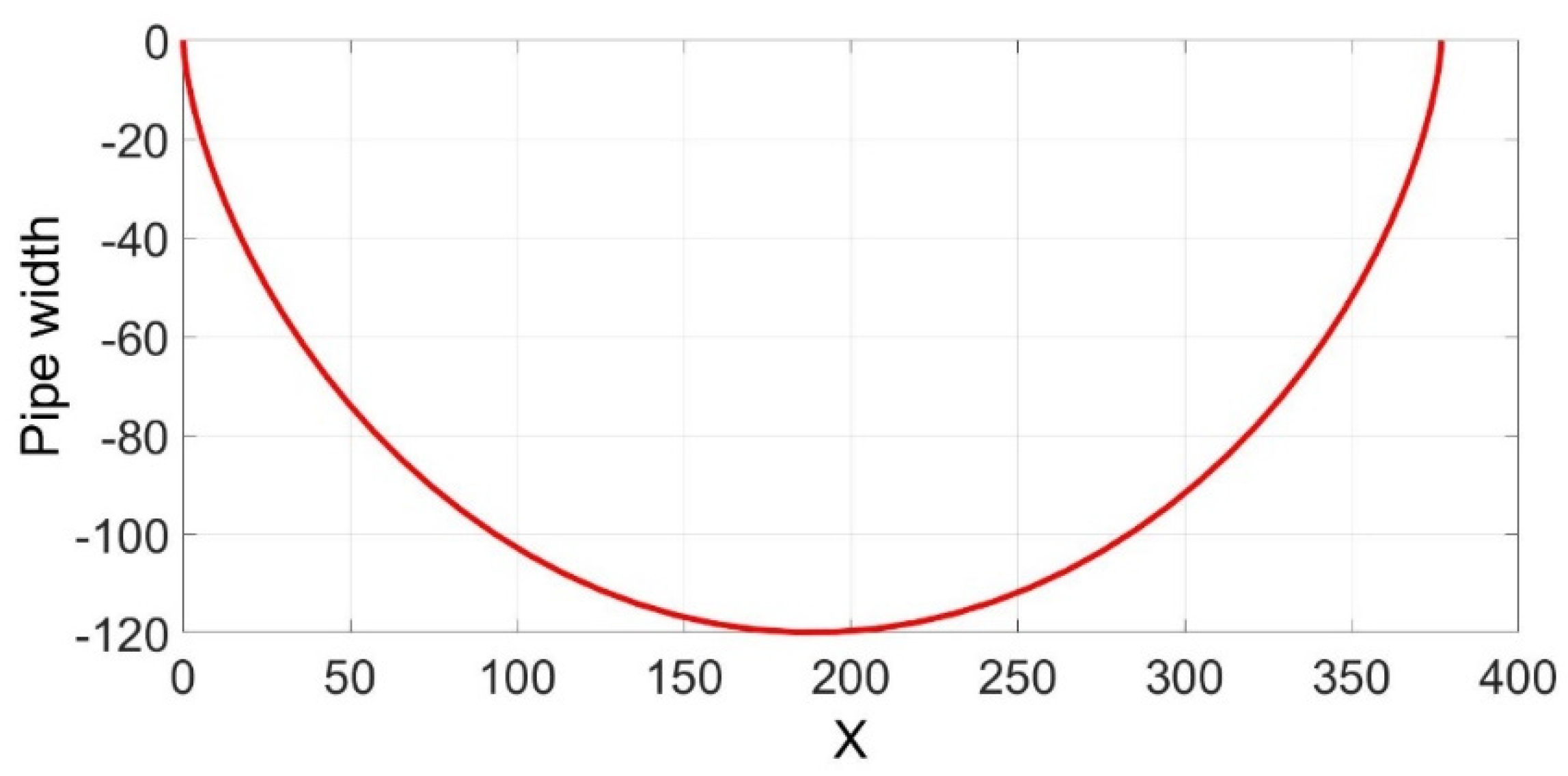
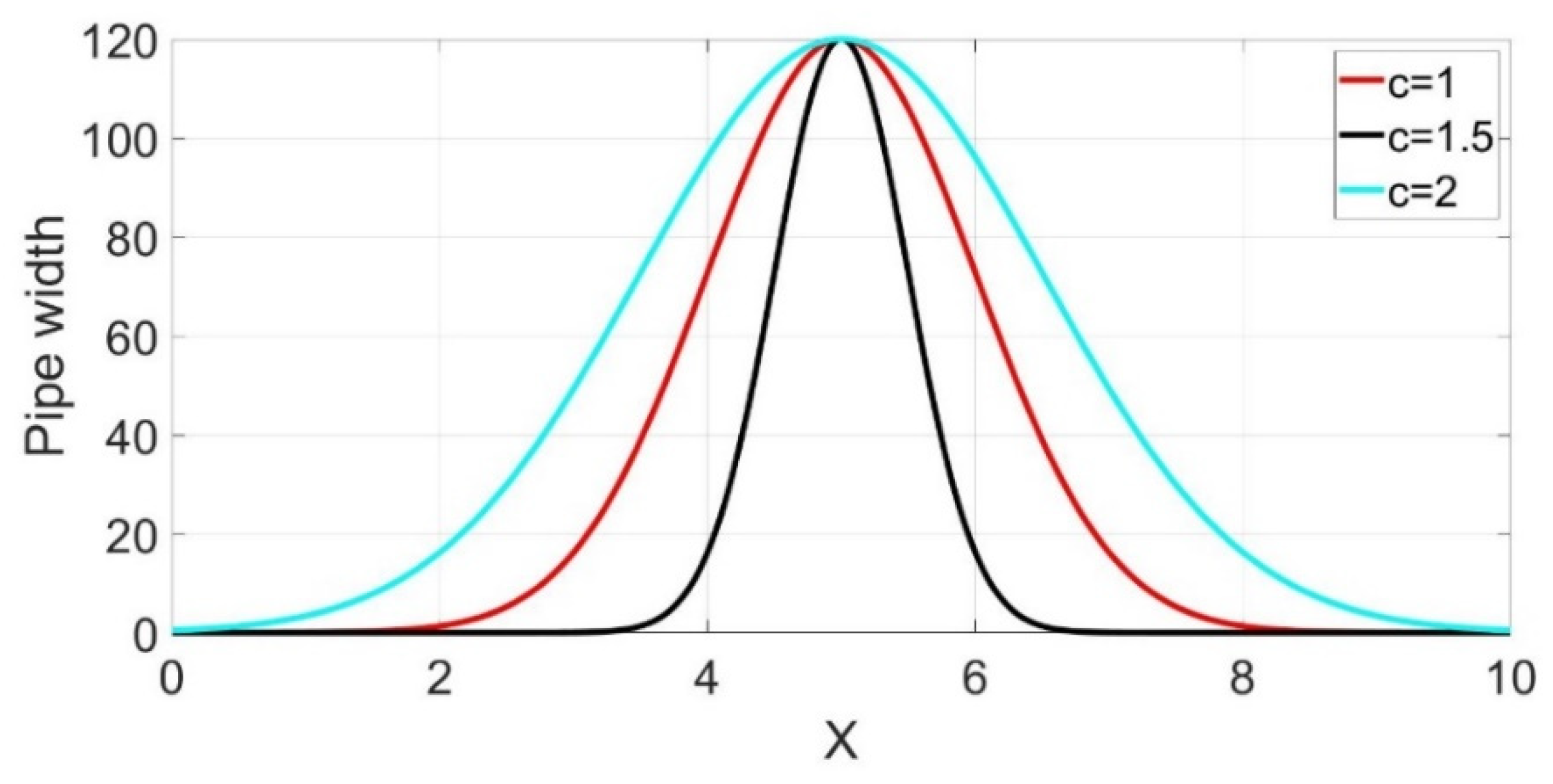
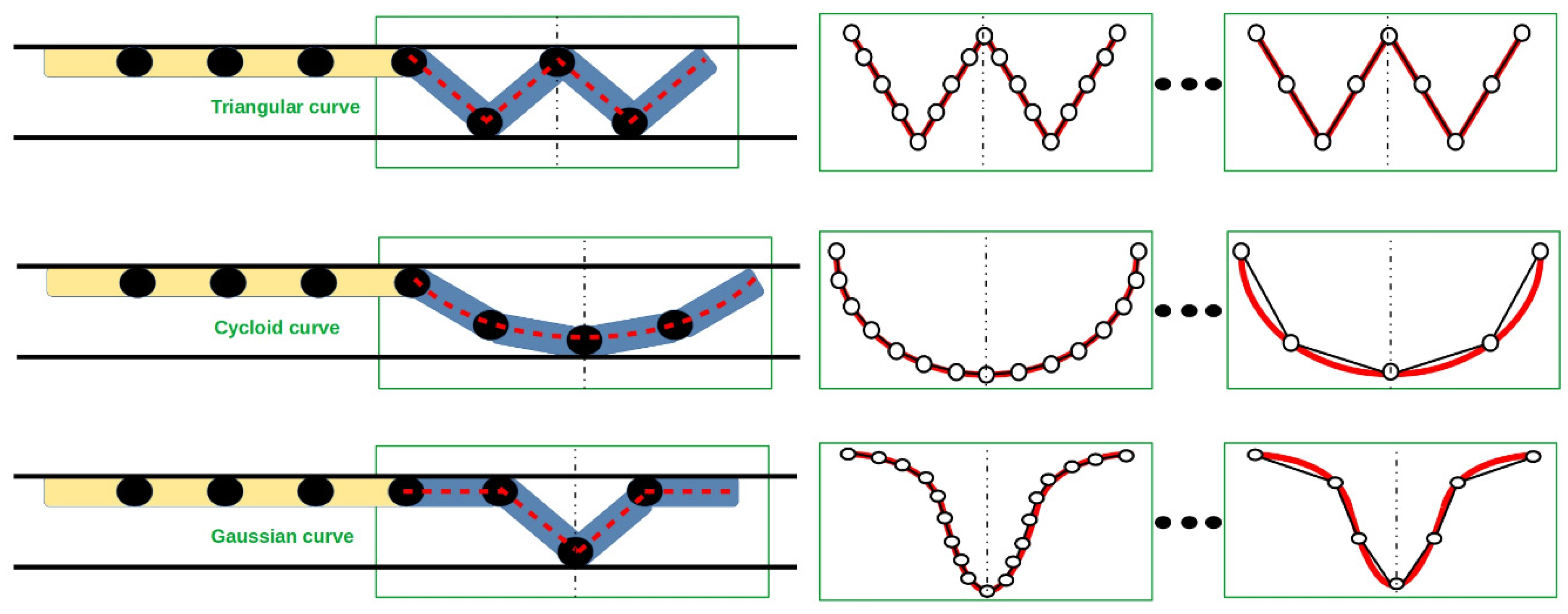
6.3.1. Mathematical Background of Symmetrical Curves
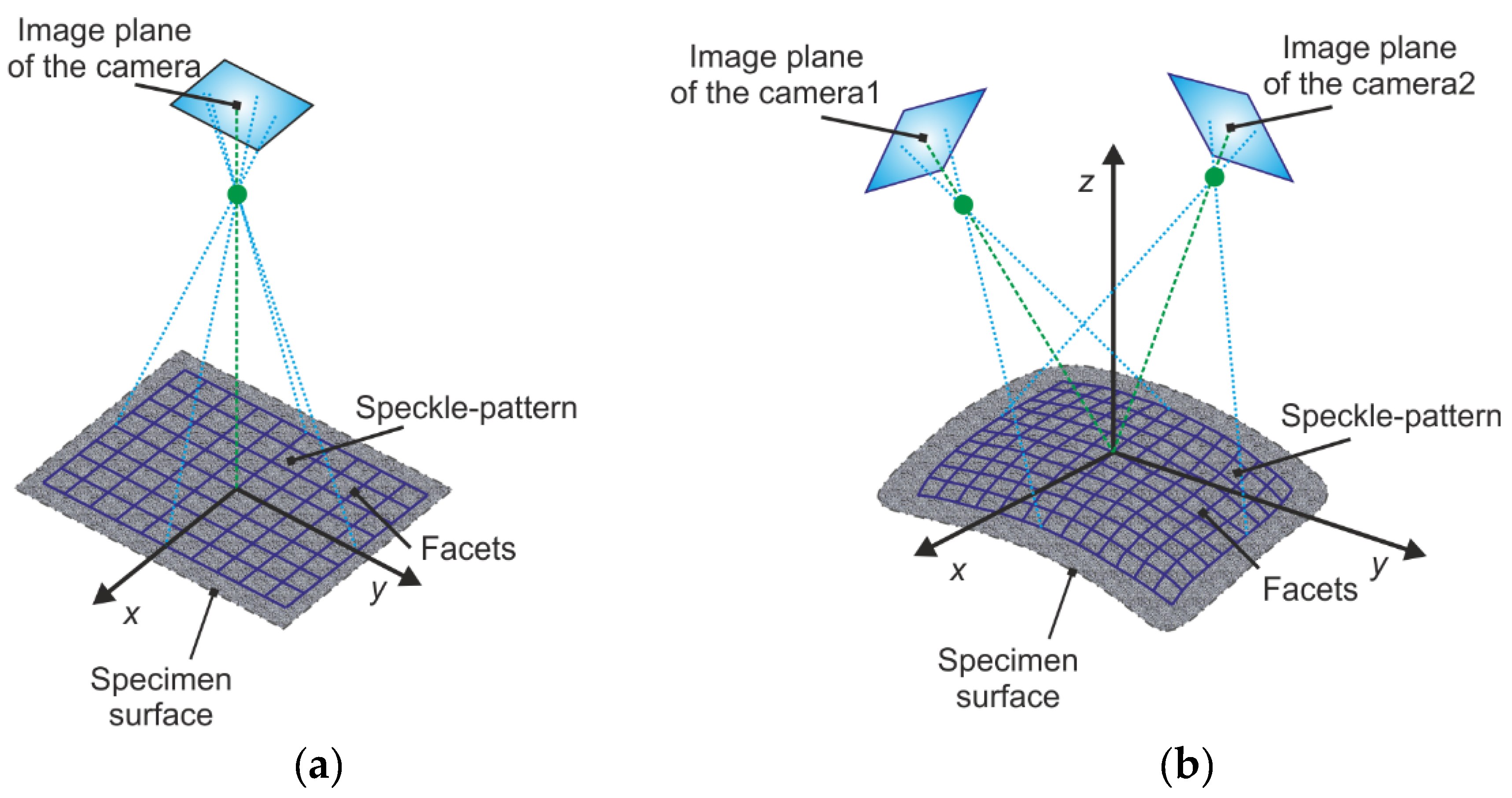
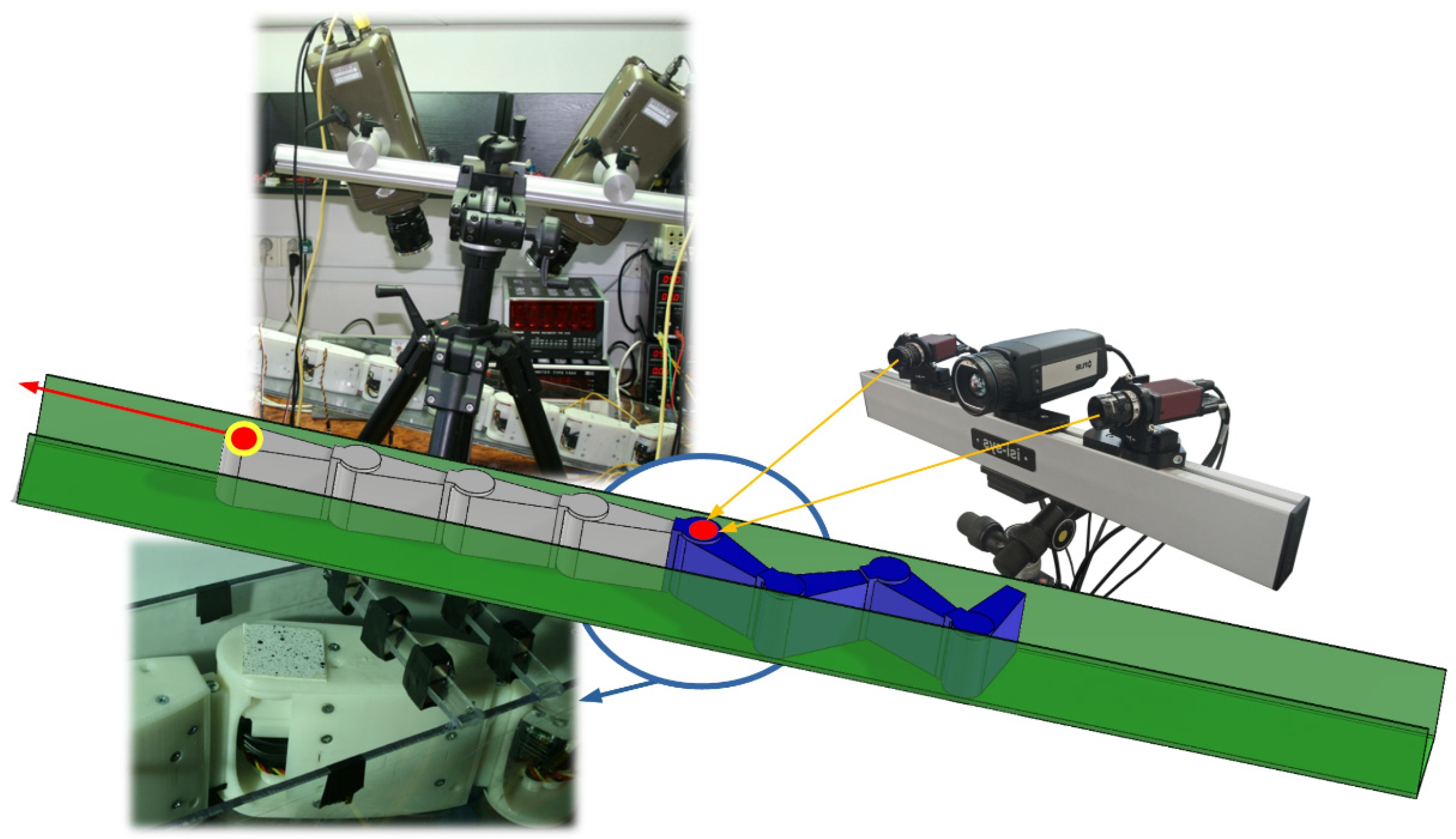
6.3.2. Digital Image Correlation Method
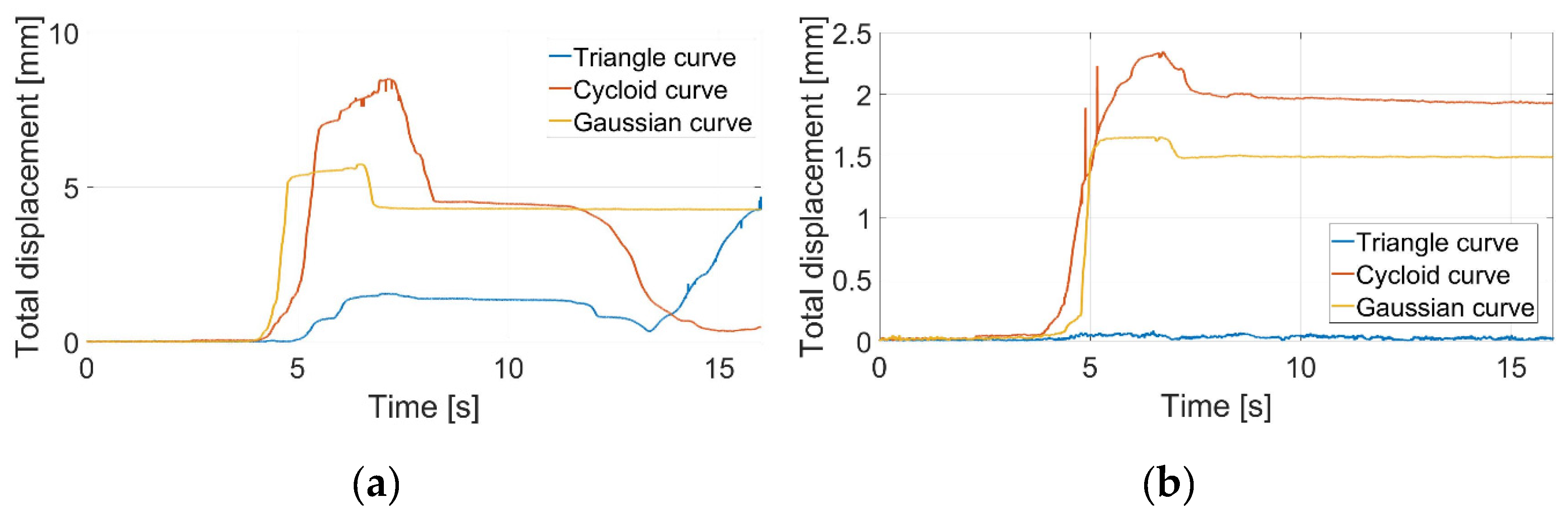
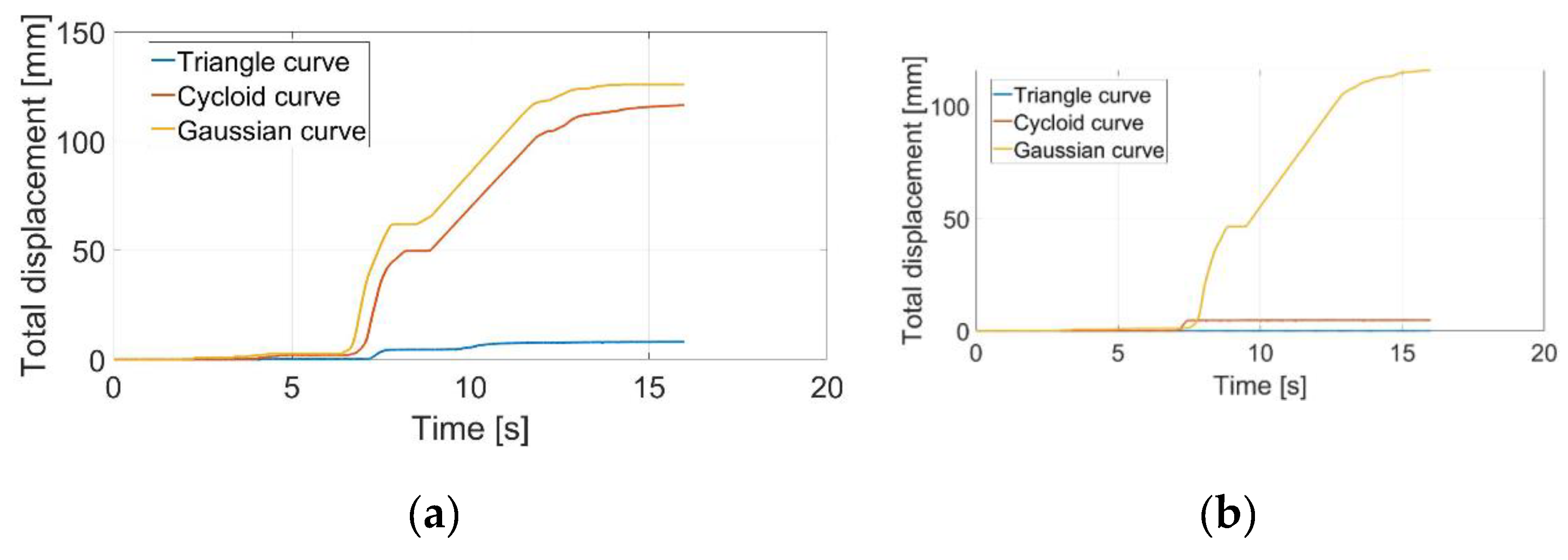
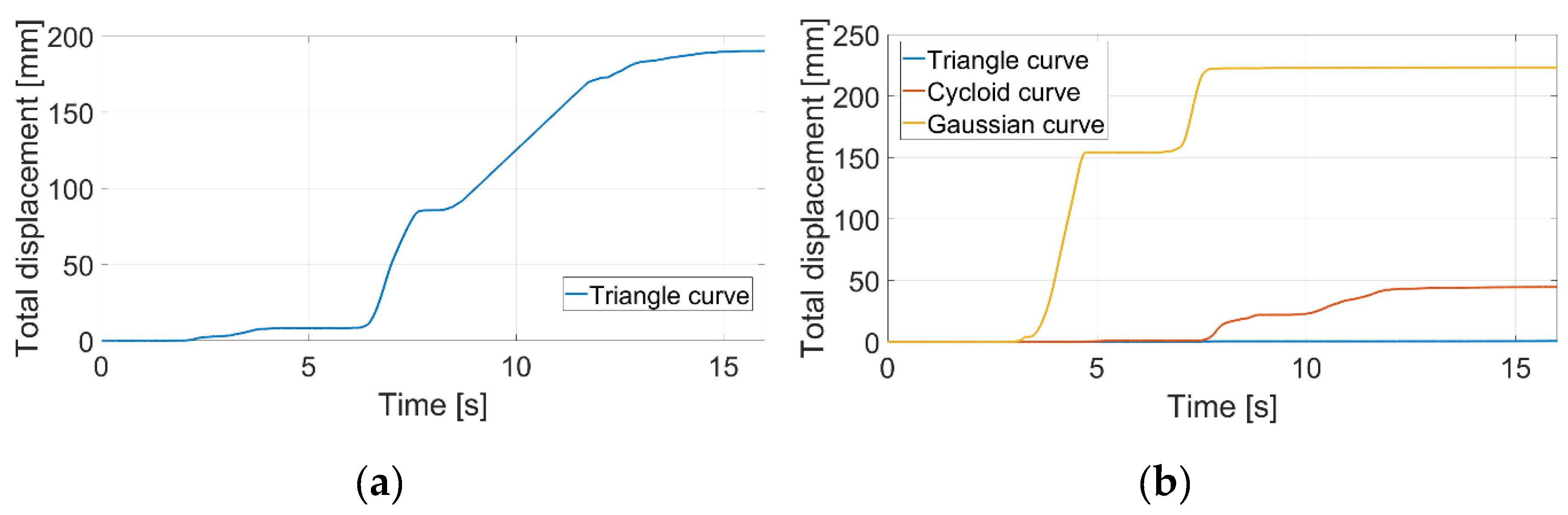
6.3.3. Measurement of Stability by DIC Method
7. Conclusions
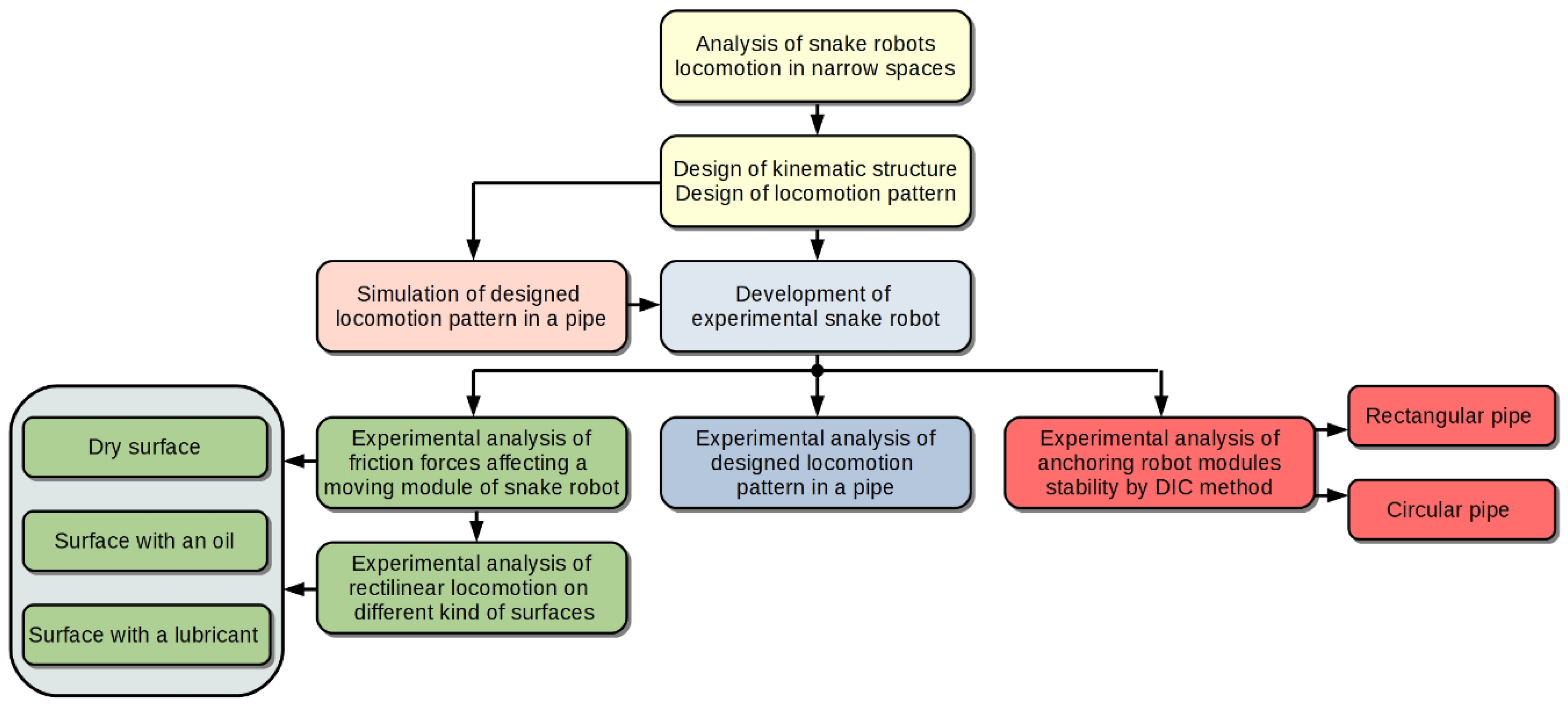
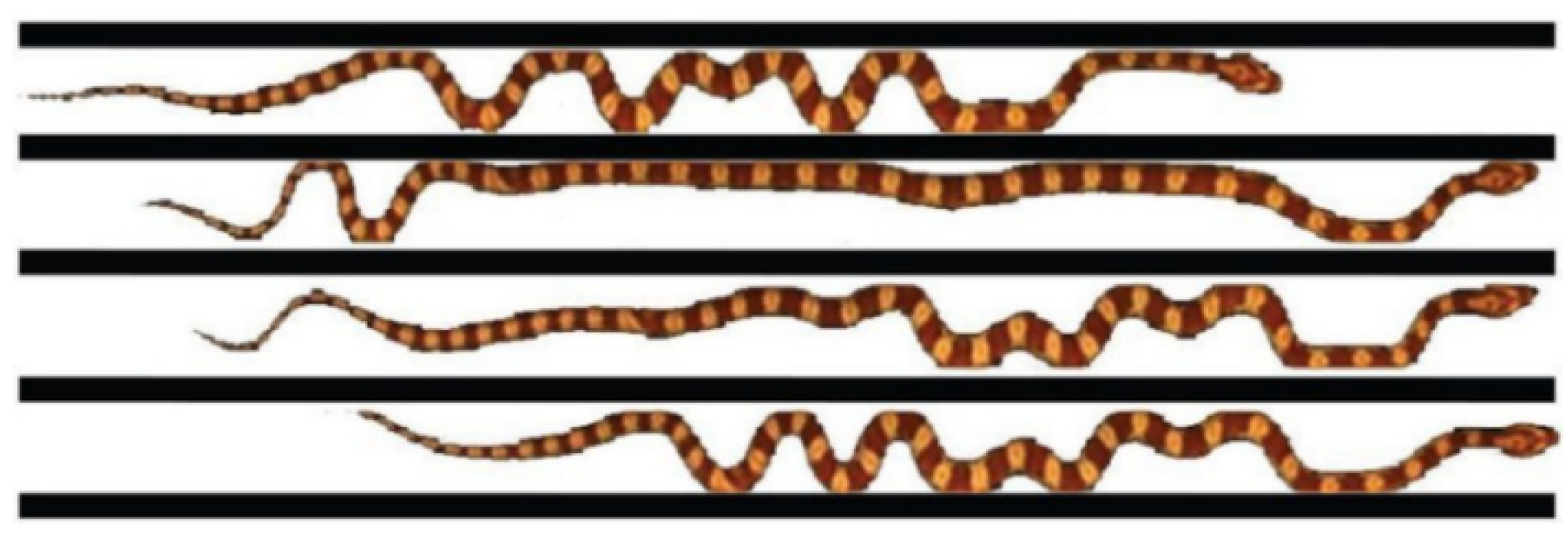
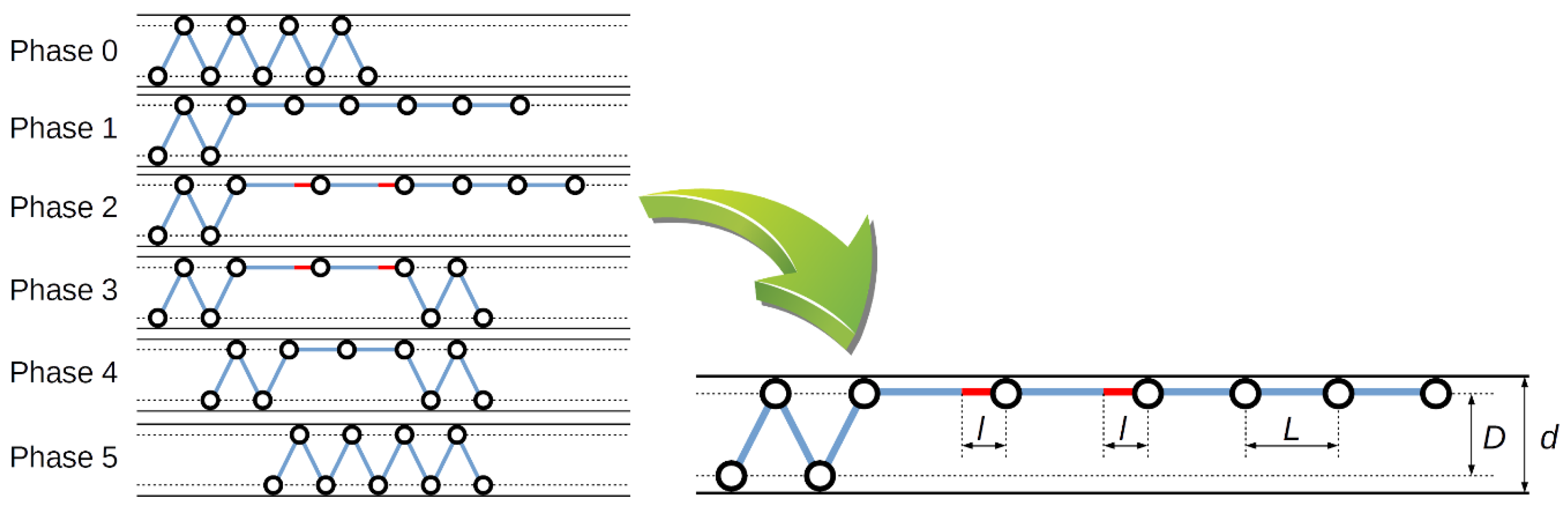
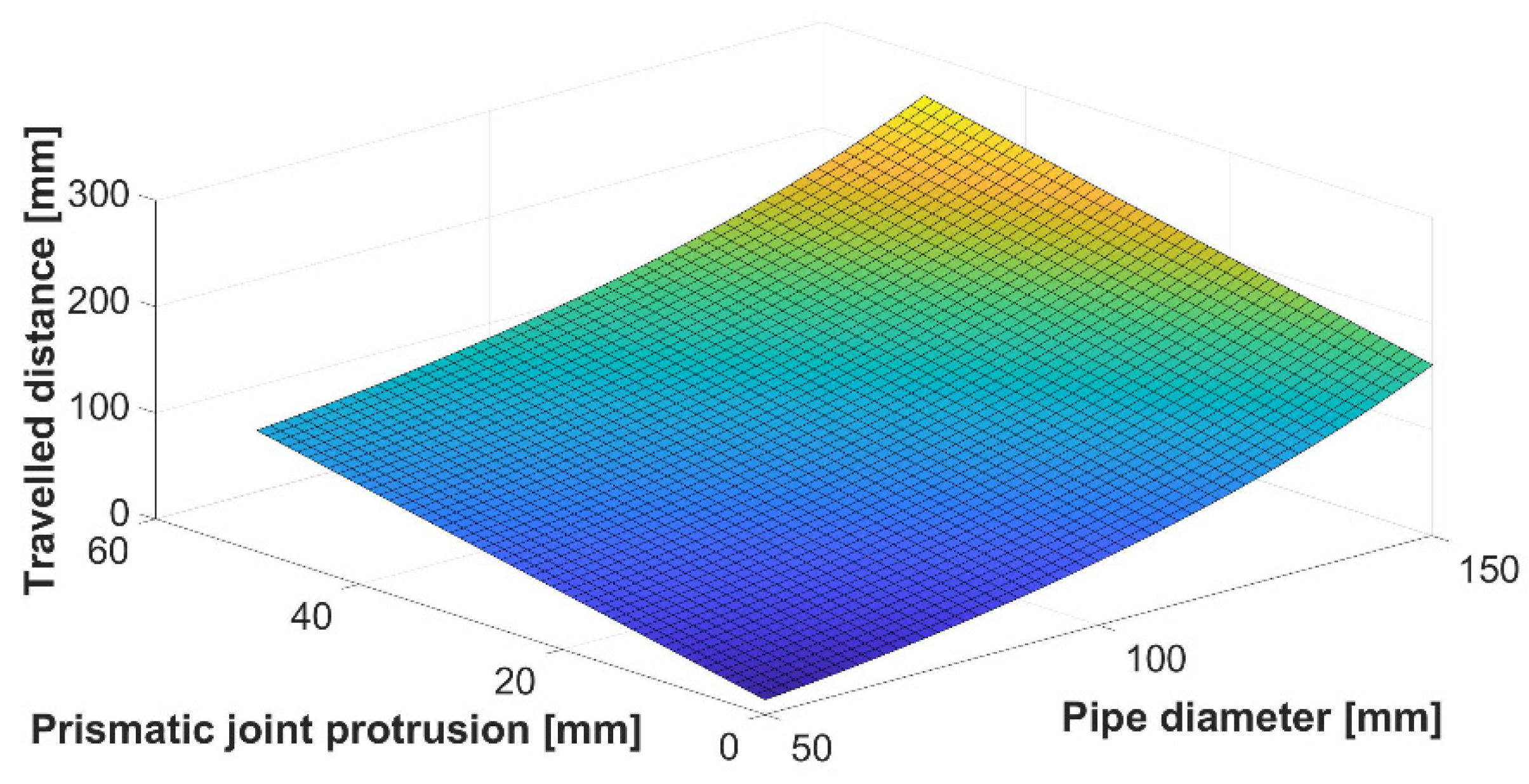
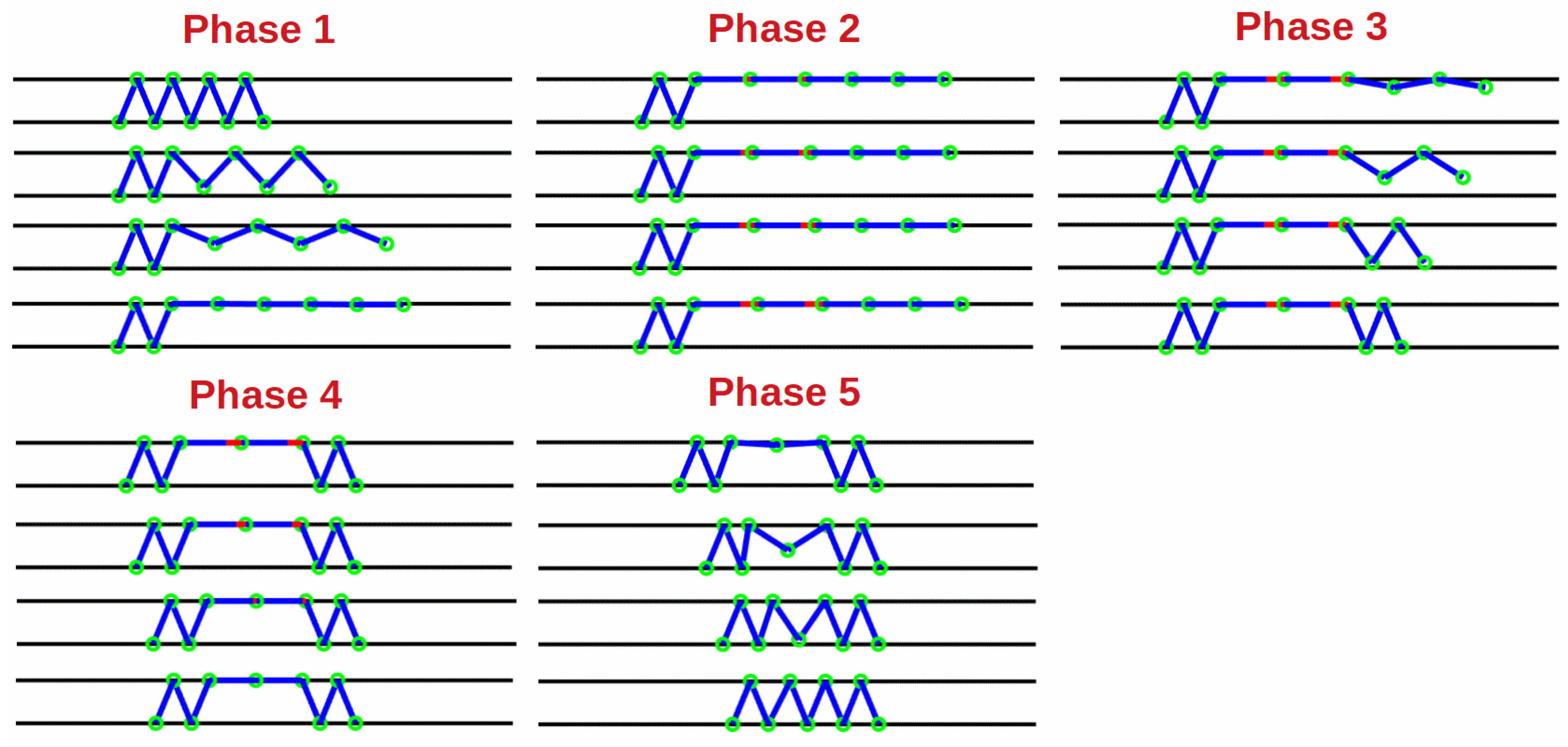
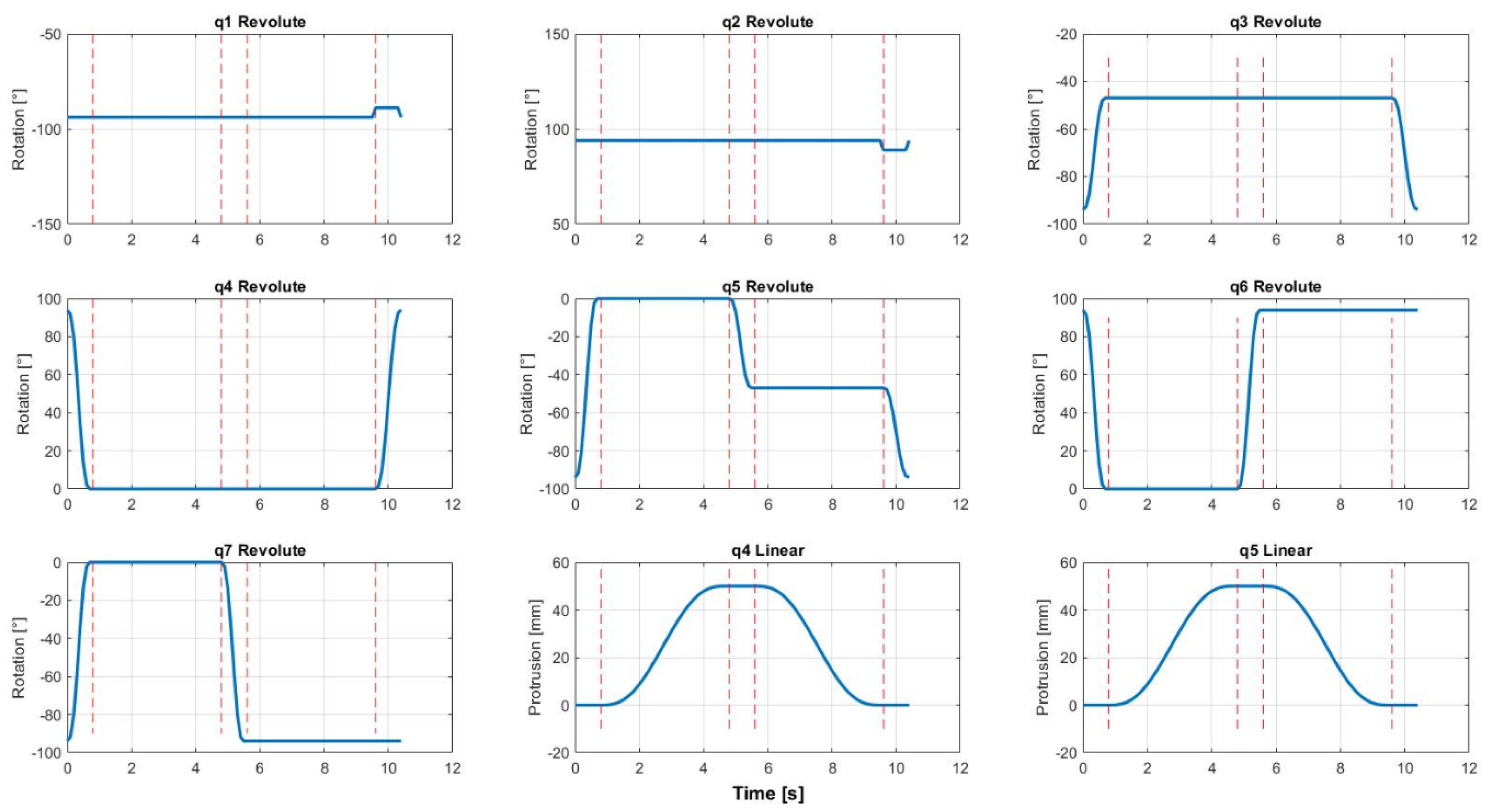
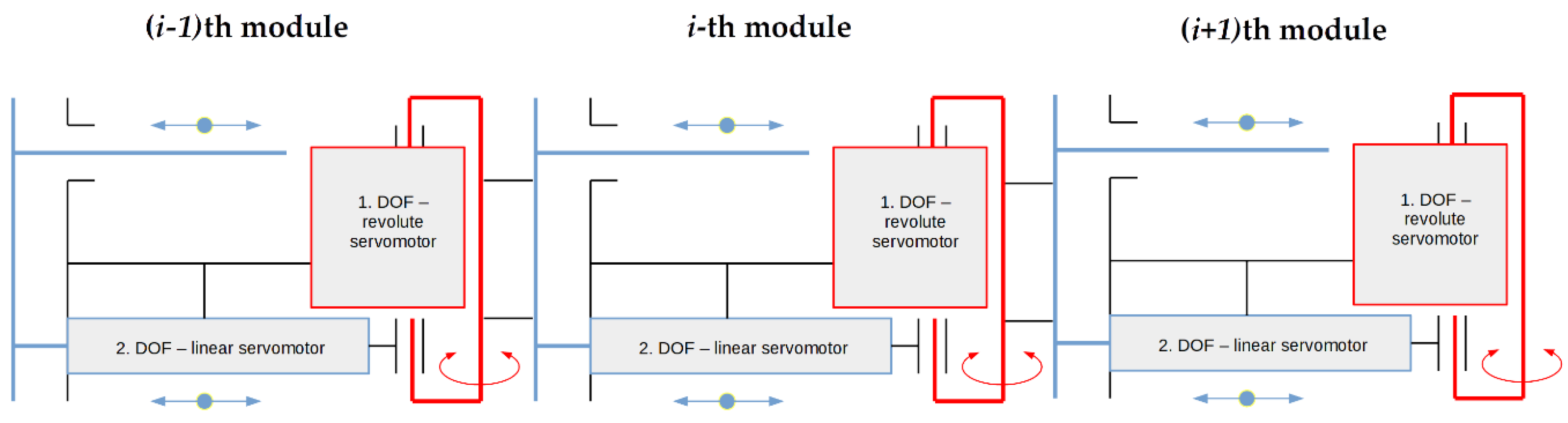
- Design of concertina locomotion based on revolute and linear joints of snake robot module. Design of mathematical model and analysis of the influence of input parameters.
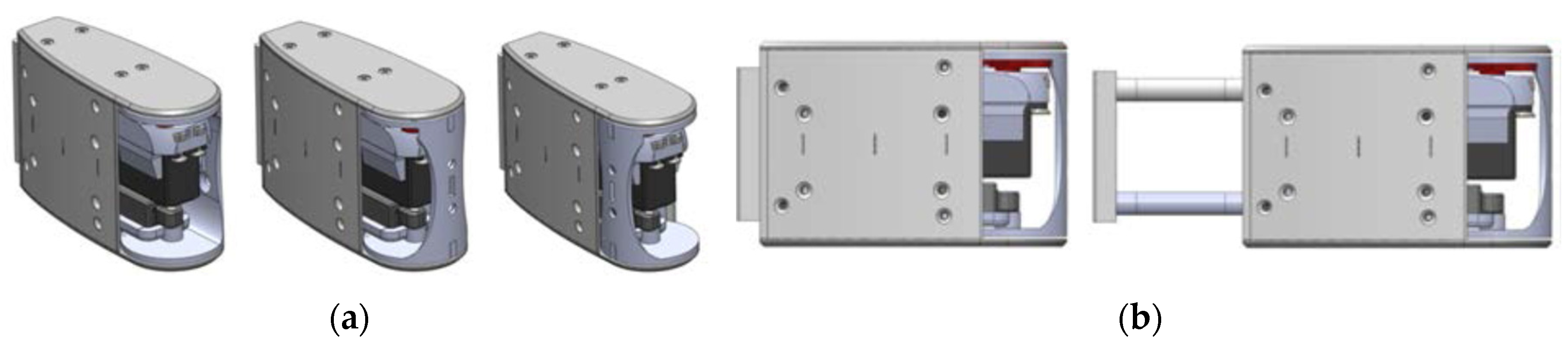
- Development of a unique experimental snake robot consisting of eight modules, each with one revolute and one linear joint.
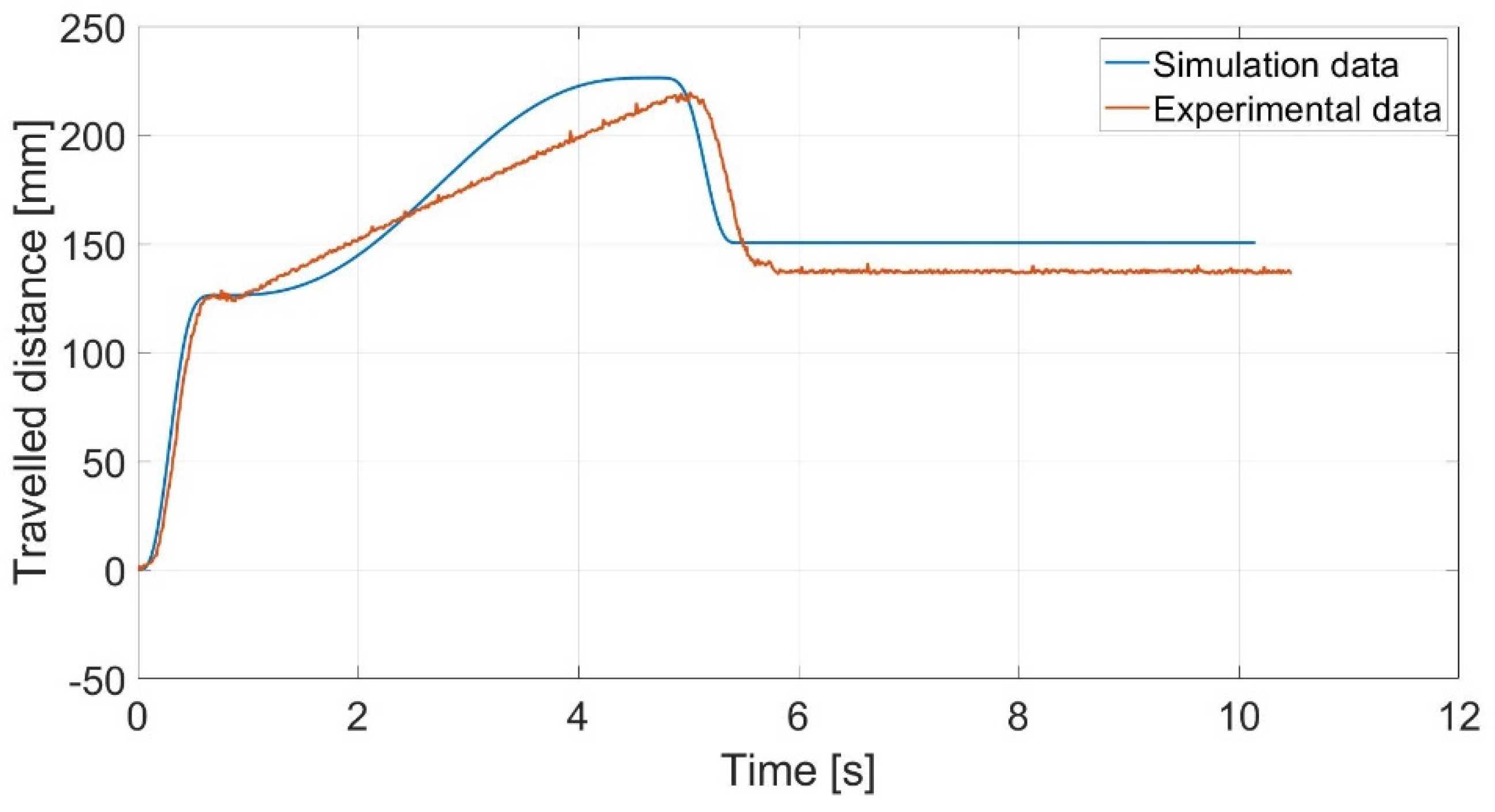
- Simulation and experimental analysis of proposed concertina locomotion.
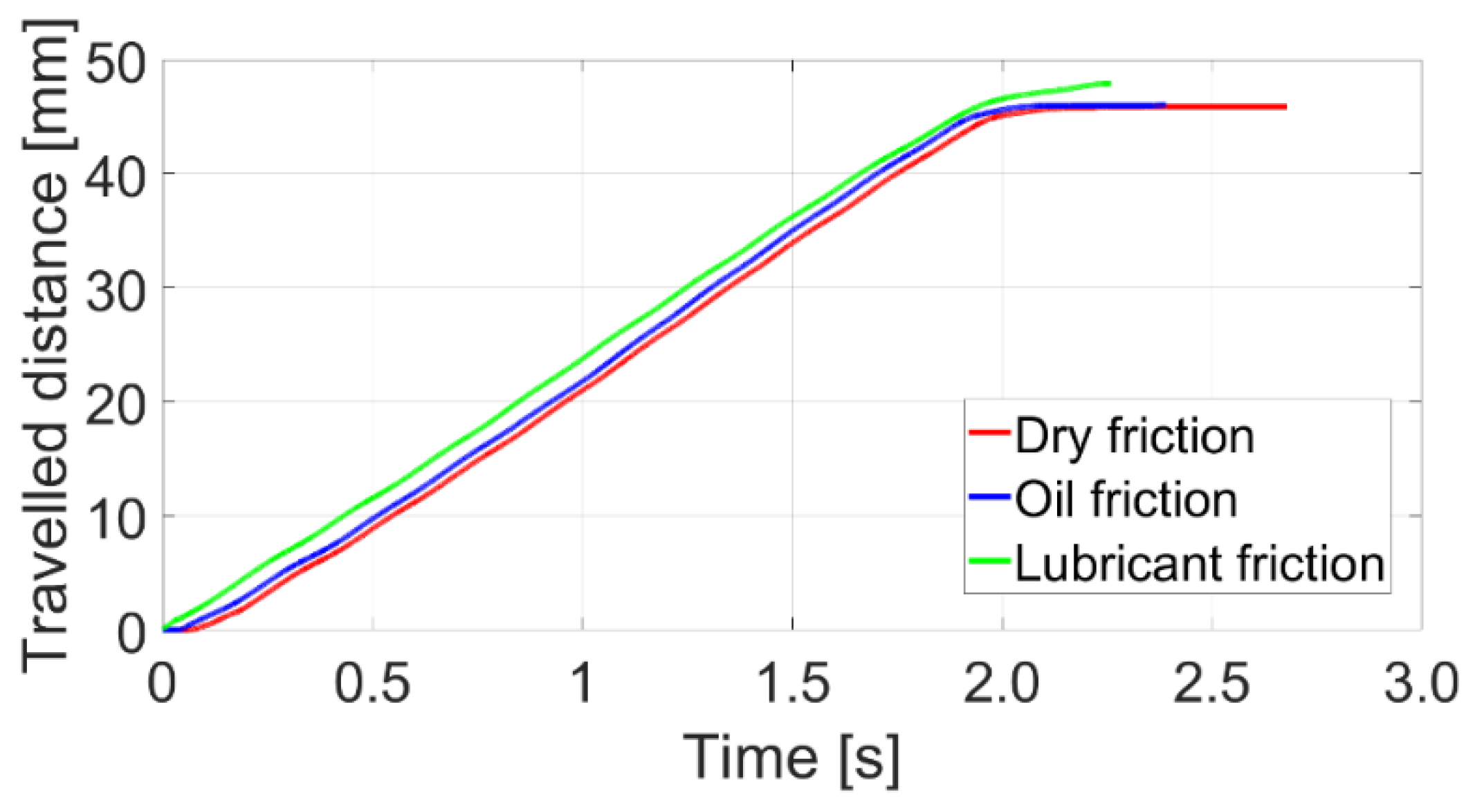
- Experimental analysis of snake robot locomotion on different types of surfaces: dry, with a layer of oil, and with a layer of lubricant. Measured friction in both directions for all cases led to almost symmetrical characteristics. The results showed that electrical current consumption for all cases was almost the same. The robot traveled its maximum possible distance with dry friction. However, with oil or lubricant on the surface, some modules slid backward, resulting in less traveled distance per three locomotion cycles.
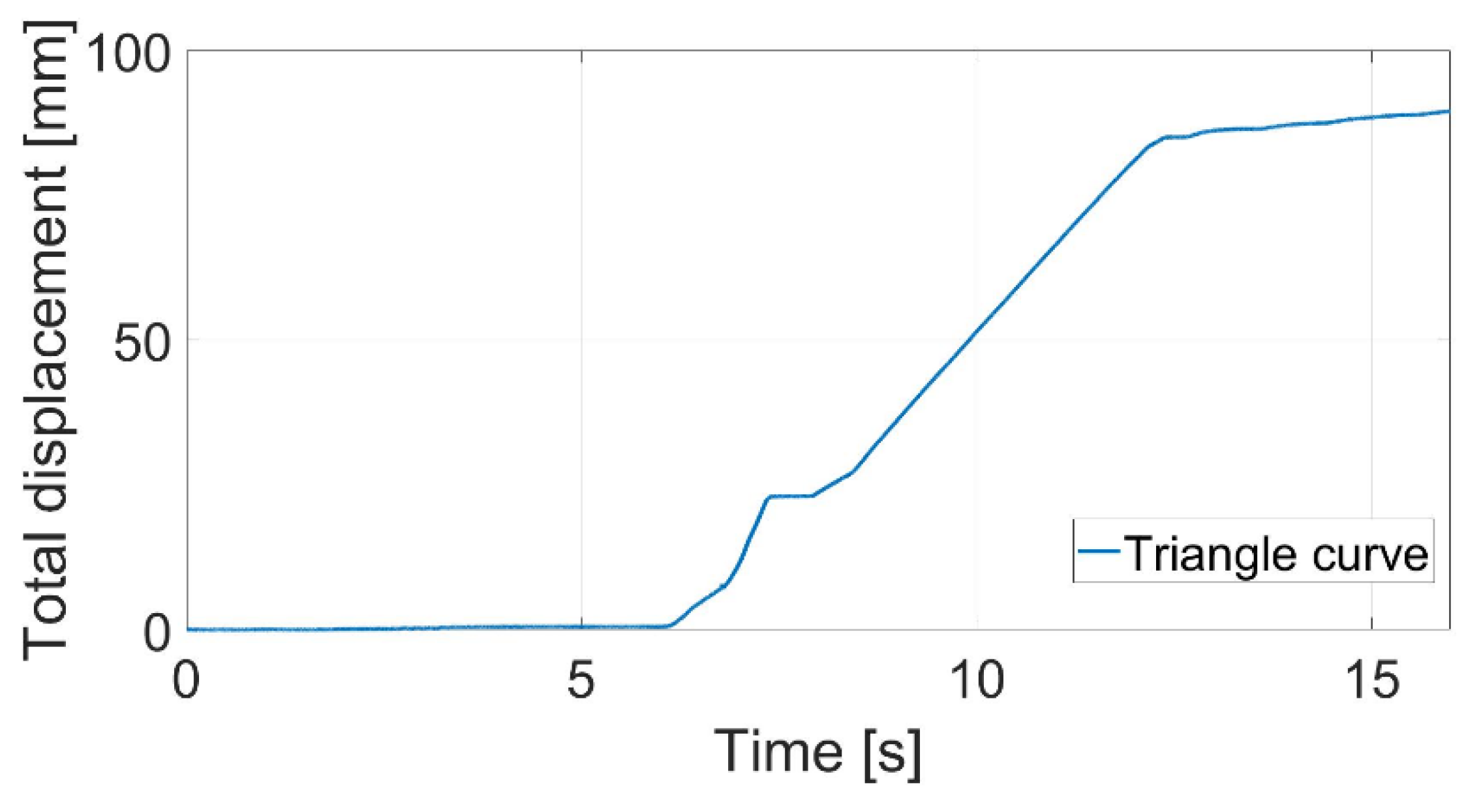
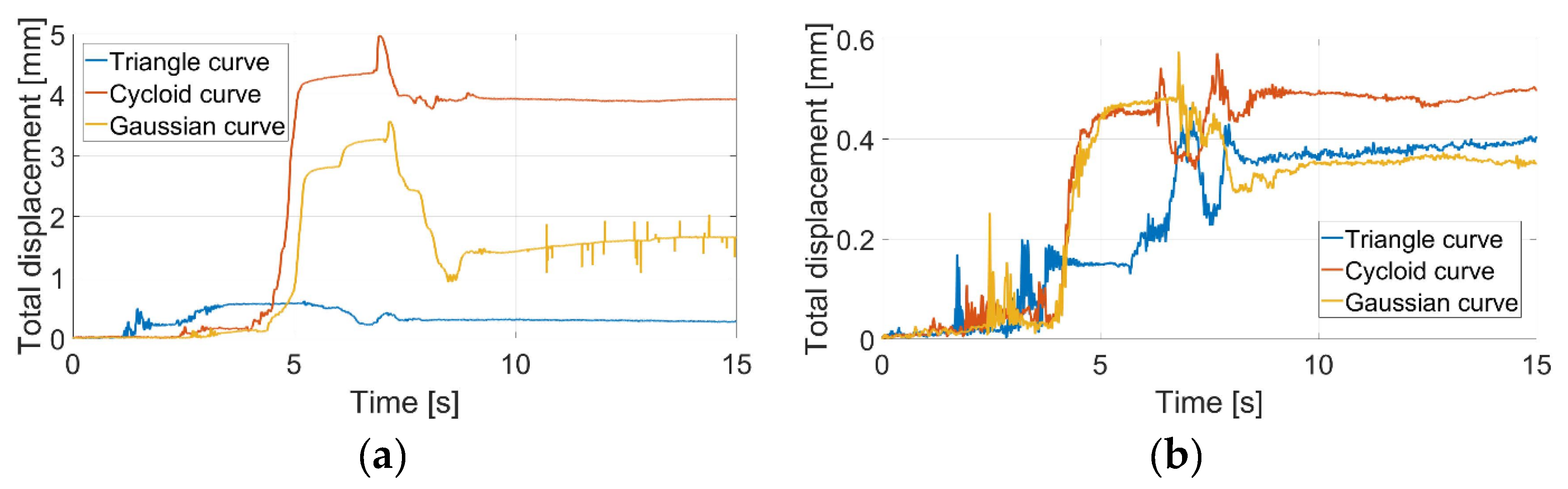
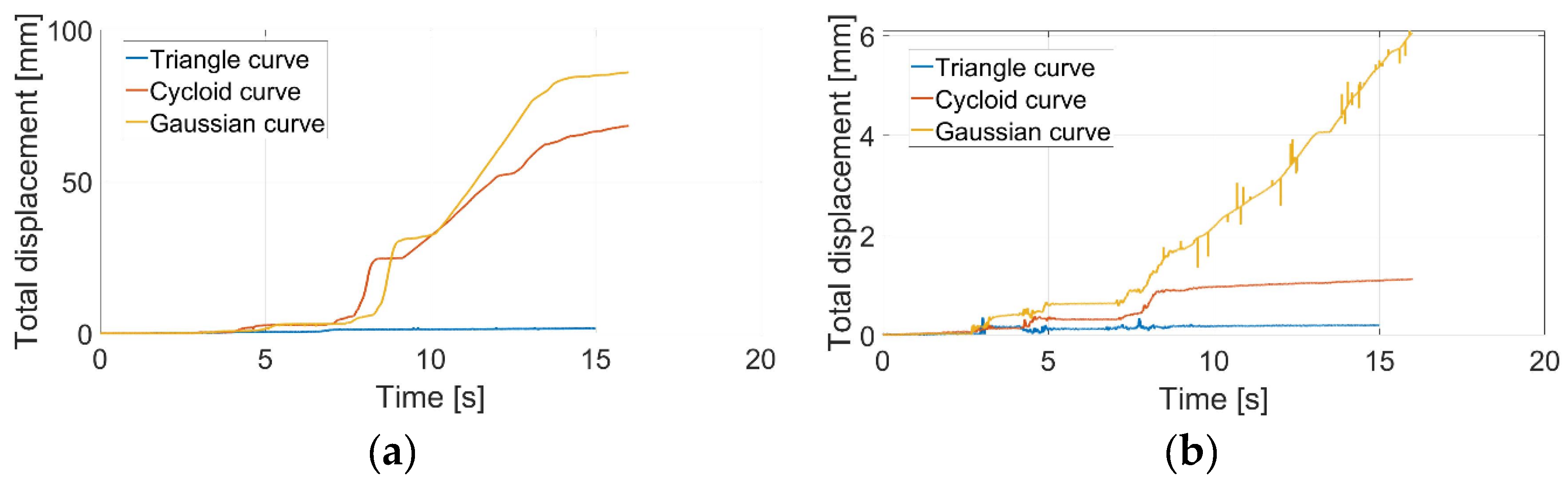
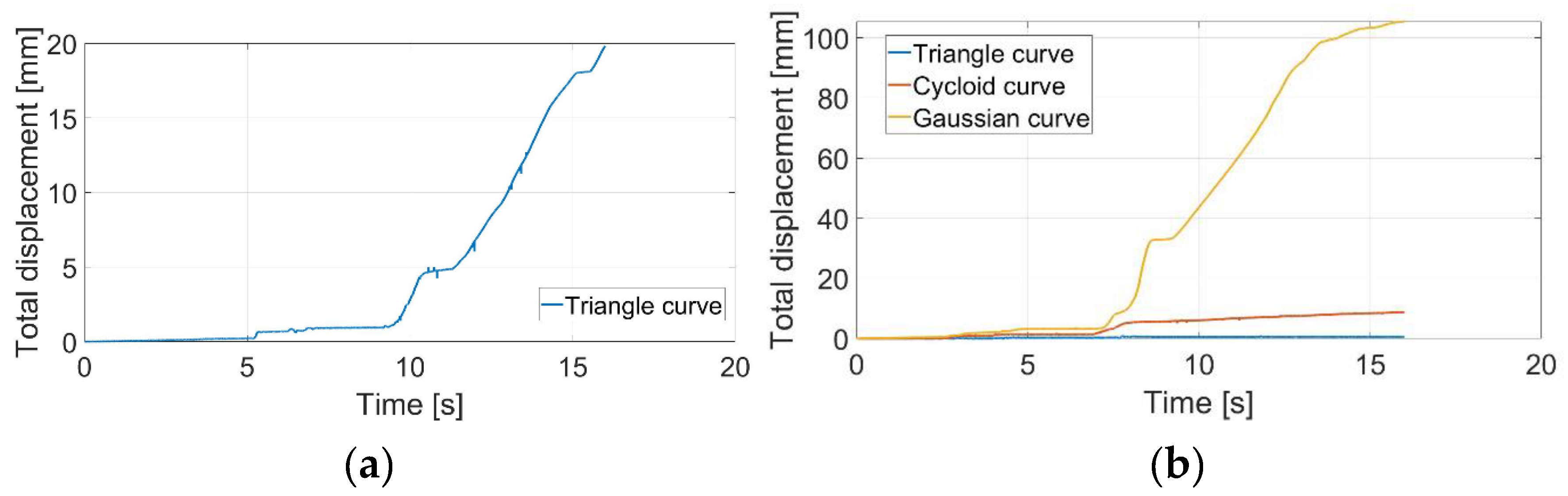
- A new approach based on anchoring of snake robot modules during locomotion in a pipe by means of symmetrical curves. Experimental analysis of their stability with changing slope of the pipe by modern DIC methodology using Q-450 Dantec Dynamics high-speed correlation system. The best solution was the use of a triangular curve. The circular pipe offered better stability for snake robot locomotion in the pipe.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lipták, T.; Virgala, I.; Frankovský, P.; Šarga, P.; Gmiterko, A.; Baločková, L. A geometric approach to modeling of four- and five-link planar snake-like robot. Int. J. Adv. Robot. Syst. 2016, 13. [Google Scholar] [CrossRef]
- Ostertag, O.; Ostertagová, E.; Kelemen, M.; Kelemenová, T.; Virgala, I.; Buša, J. Miniature Mobile Bristled In-Pipe Machine. Int. J. Adv. Robot. Syst. 2014, 11, 189. [Google Scholar] [CrossRef]
- Kelemen, M.; Virgala, I.; Lipták, T.; Ľubica, M.; Filakovský, F.; Bulej, V. A Novel Approach for a Inverse Kinematics Solution of a Redundant Manipulator. Appl. Sci. 2018, 8, 2229. [Google Scholar] [CrossRef]
- Hirose, S. Biologically Inspired Robots: Snake-Like Locomotors and Manipulators; Oxford University Press: Oxford, UK, 1993. [Google Scholar]
- Wakimoto, S.; Nakajima, J.; Takata, M.; Kanda, T.; Suzumori, K. A micro snake-like robot for small pipe inspection. In Proceedings of 2003 International Symposium on Micromechatronics and Human Science (IEEE Cat. No.03TH8717); Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2004. [Google Scholar]
- Greenfield, A.; Rizzi, A.A.; Choset, H. Dynamic Ambiguities in Frictional Rigid-body Systems with Application to Climbing via Bracing. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2006; pp. 1947–1952. [Google Scholar]
- Brunete, A.; Gambao, E.; Torres, J.; Hernando, M. A 2 DoF Servomotor-based Module for Pipe Inspection Modular Micro-robots. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2006; pp. 1329–1334. [Google Scholar]
- Barazandeh, F.; Bahr, B.; Moradi, A. How self-locking reduces actuators torque in climbing snake robots. In Proceedings of the 2007 IEEE/ASME International Conference on Advanced Intelligent Mechatronics; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2007; pp. 1–6. [Google Scholar]
- Wright, C.; Johnson, A.M.; Peck, A.; Mccord, Z.; Naaktgeboren, A.; Gianfortoni, P.; Gonzalez-Rivero, M.; Hatton, R.; Choset, H. Design of a modular snake robot. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2007; pp. 2609–2614. [Google Scholar]
- Kuwada, A.; Wakimoto, S.; Suzumori, K.; Adomi, Y. Automatic pipe negotiation control for snake-like robot. In Proceedings of the 2008 IEEE/ASME International Conference on Advanced Intelligent Mechatronics; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2008; pp. 558–563. [Google Scholar]
- Andruska, A.M.; Peterson, K.S. Control of a Snake-Like Robot in an Elastically Deformable Channel. IEEE/ASME Trans. Mechatron. 2008, 13, 219–227. [Google Scholar] [CrossRef]
- Akbarzadeh-T, M.-R.; Safehian, J.; Safehian, J.; Kalani, H. Generating Snake Robot Concertina Locomotion Using a New Dynamic Curve. Int. J. Model. Optim. 2011, 1, 134–140. [Google Scholar] [CrossRef]
- Marvi, H.; Hu, D.L. Friction enhancement in concertina locomotion of snakes. J. R. Soc. Interface 2012, 9, 3067–3080. [Google Scholar] [CrossRef] [PubMed]
- Kano, T.; Satake, F.; Date, H.; Inoue, K.; Ishiguro, A. Doing Well in Narrow Aisle! Decentralized Control Mechanism Underlying Adaptive Concertina Locomotion of Snakes. Int. Symp. Nonlinear Theory Appl. 2014, 32–35. [Google Scholar] [CrossRef]
- Trebuňa, F.; Virgala, I.; Pástor, M.; Lipták, T.; Ľubica, M. An inspection of pipe by snake robot. Int. J. Adv. Robot. Syst. 2016, 13. [Google Scholar] [CrossRef]
- Virgala, I.; Kelemen, M.; Prada, E.; Surovec, R. Motion analysis of snake robot segment. In Proceedings of the 2013 IEEE 11th International Symposium on Applied Machine Intelligence and Informatics (SAMI), Herl’any, Slovakia, 31 January–2 February 2013; pp. 145–148. [Google Scholar] [CrossRef]
- Tang, C.; Shu, X.; Meng, D.-Y.; Zhou, G. Arboreal concertina locomotion of snake robots on cylinders. Int. J. Adv. Robot. Syst. 2017, 14. [Google Scholar] [CrossRef]
- Huang, C.-W.; Huang, C.-H.; Hung, Y.-H.; Chang, C.-Y. Sensing pipes of a nuclear power mechanism using low-cost snake robot. Adv. Mech. Eng. 2018, 10. [Google Scholar] [CrossRef]
- Gray, J. The mechanism of locomotion in snakes. J. Exp. Boil. 1946, 23, 101–120. [Google Scholar]
- Virgala, I.; Kelemen, M.; Varga, M.; Kuryło, P. Analyzing, Modeling and Simulation of Humanoid Robot Hand Motion. Procedia Eng. 2014, 96, 489–499. [Google Scholar] [CrossRef]
- Bozek, P.; Ivandić, Ž.; Lozhkin, A.; Lyalin, V.; Tarasov, V. Solutions to the characteristic equation for industrial robot’s elliptic trajectories. Teh. Vjesn.-Tech. Gaz. 2016, 23, 1017–1023. [Google Scholar] [CrossRef]
- Krolczyk, G.M.; Legutko, S. Experimental Analysis by Measurement of Surface Roughness Variations in Turning Process of Duplex Stainless Steel. Metrol. Meas. Syst. 2014, 21, 759. [Google Scholar] [CrossRef]
- Huang, S.; Liang, W.; Tan, K.K. Intelligent Friction Compensation: A Review. IEEE/ASME Trans. Mechatron. 2019, 24, 1763–1774. [Google Scholar] [CrossRef]
- Virgala, I.; Frankovský, P.; Frankovský, M.K.P.; Kenderová, M. Friction Effect Analysis of a DC Motor. Am. J. Mech. Eng. 2013, 1, 1–5. [Google Scholar] [CrossRef]
- Liu, L.; Xu, W.; Yue, X.-L.; Huang, D. Stochastic Bifurcation of a Strongly Non-Linear Vibro-Impact System with Coulomb Friction under Real Noise. Symmetry 2018, 11, 4. [Google Scholar] [CrossRef]
- Yamada, S. Nanotribology of Symmetric and Asymmetric Liquid Lubricants. Symmetry 2010, 2, 320–345. [Google Scholar] [CrossRef]
- Prada, E.; Valášek, M.; Virgala, I.; Gmiterko, A.; Kelemen, M.; Hagara, M.; Lipták, T.; Erik, P. New approach of fixation possibilities investigation for snake robot in the pipe. In Proceedings of the 2015 IEEE International Conference on Mechatronics and Automation (ICMA); Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2015; pp. 1204–1210. [Google Scholar]








































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Field of view | Adjustable from several mm2 to several m2 Typical size from 70 × 50 mm2 to 400 × 300 mm2 |
| Measuring range | Displacement: ≈10–5 of field of view (100 mm field corresponds to 1 μm) |
| Exposure time | Adjustable from 300 ns |
| Resolution | Max. 1280 × 800 px up to sampling frequency of 3140 fps |
| Results form | 3D contour of analyzed object, 3D displacement |
| Control electronics | Laptop with Windows 7 and Istra4D control software, 16-bit AD/DA converter (eight channels with voltage range from ±0.05 V to ±10 V) |
| Illumination | High-power halogen lamp with natural light |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Virgala, I.; Kelemen, M.; Božek, P.; Bobovský, Z.; Hagara, M.; Prada, E.; Oščádal, P.; Varga, M. Investigation of Snake Robot Locomotion Possibilities in a Pipe. Symmetry 2020, 12, 939. https://doi.org/10.3390/sym12060939
Virgala I, Kelemen M, Božek P, Bobovský Z, Hagara M, Prada E, Oščádal P, Varga M. Investigation of Snake Robot Locomotion Possibilities in a Pipe. Symmetry. 2020; 12(6):939. https://doi.org/10.3390/sym12060939
Chicago/Turabian StyleVirgala, Ivan, Michal Kelemen, Pavol Božek, Zdenko Bobovský, Martin Hagara, Erik Prada, Petr Oščádal, and Martin Varga. 2020. "Investigation of Snake Robot Locomotion Possibilities in a Pipe" Symmetry 12, no. 6: 939. https://doi.org/10.3390/sym12060939
APA StyleVirgala, I., Kelemen, M., Božek, P., Bobovský, Z., Hagara, M., Prada, E., Oščádal, P., & Varga, M. (2020). Investigation of Snake Robot Locomotion Possibilities in a Pipe. Symmetry, 12(6), 939. https://doi.org/10.3390/sym12060939