An Optimal Fourth Order Derivative-Free Numerical Algorithm for Multiple Roots

 ,
, 
Abstract
1. Introduction
2. Development of the Scheme
3. Generalization of the Method
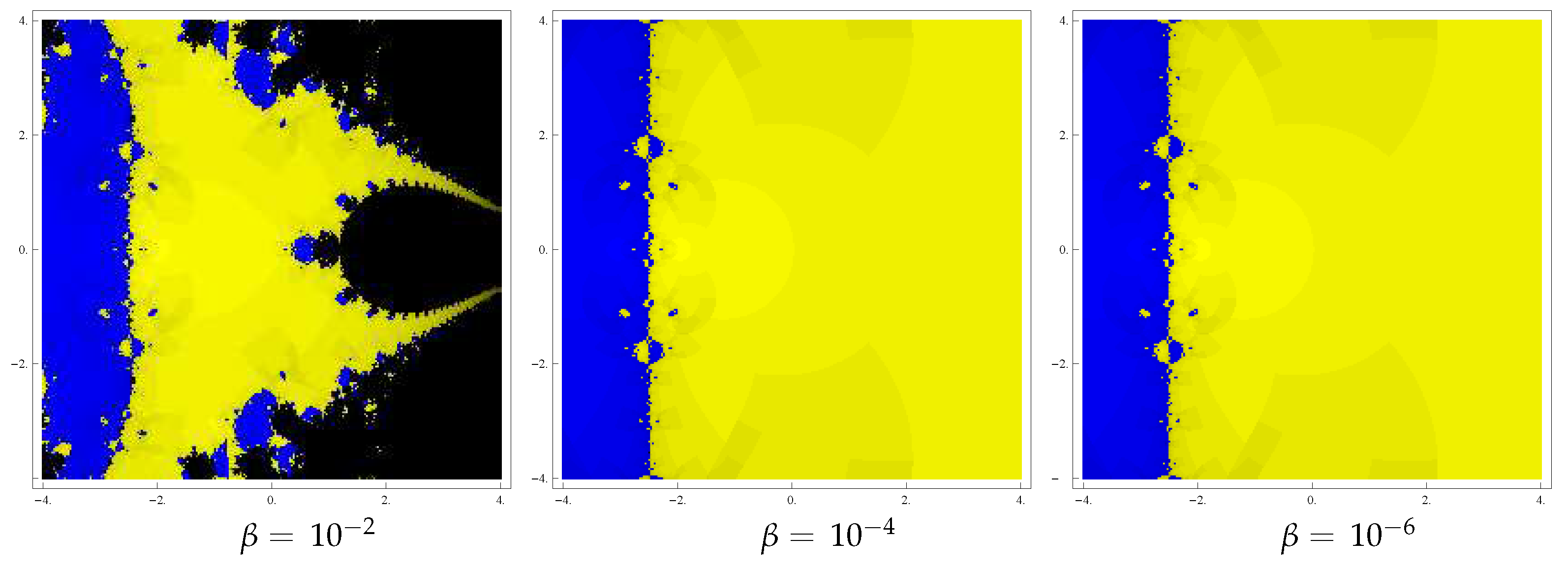
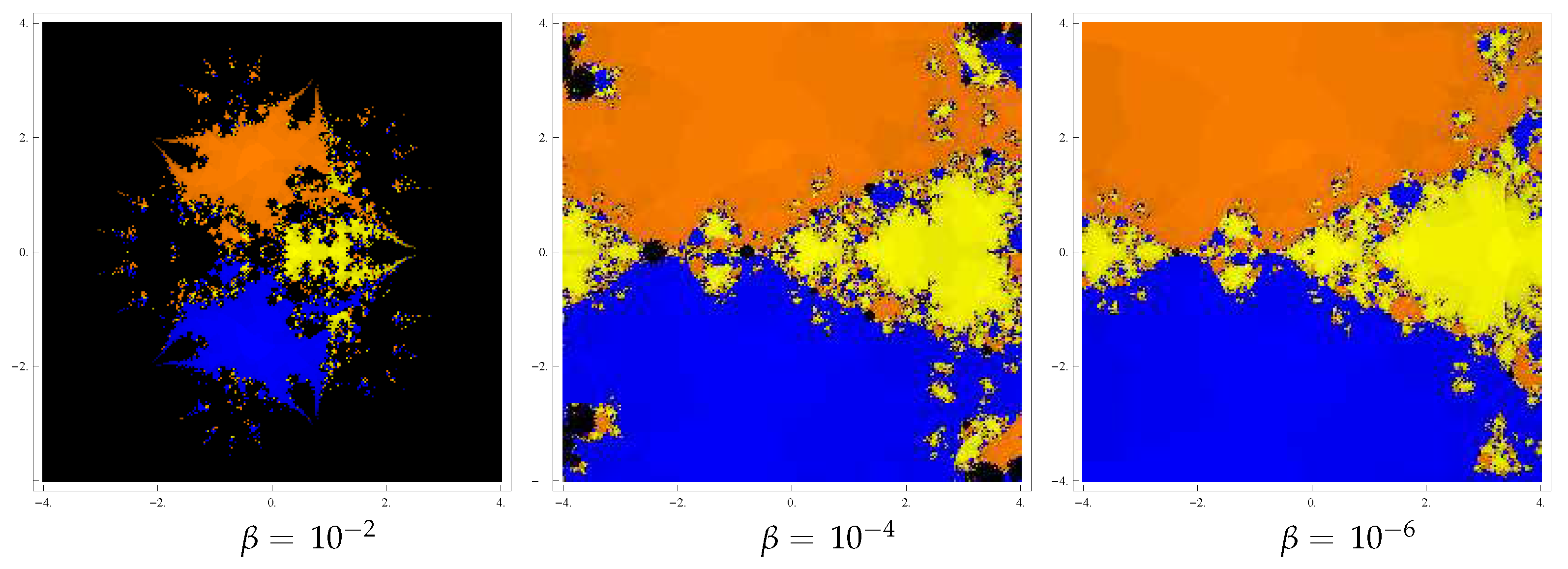
4. Basins of Attraction
5. Numerical Results
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Tetsuro, Y. Historical Developments in Convergence Analysis for Newton’s and Newton-Like Methods. In Numerical Analysis: Historical Developments in the 20th Century; Brezinski, C., Wuytack, L., Eds.; Elsevier: Amsterdam, The Netherlands, 2001; pp. 241–263. [Google Scholar]
- Kantorovich, L.V. On Newton’s Method. In Collected Works on Approximation Analysis of the Leningrad Branch of the Institute; Trudy Mat. Inst. Steklov.; Academy of Sciences of the Soviet Union: Moscow, Russia, 1949; pp. 104–144. [Google Scholar]
- Argyros, I.K. Convergence and Applications of Newton-Type Iterations; Springer: New York, NY, USA, 2008. [Google Scholar]
- Schröder, E. Über unendlich viele Algorithmen zur Auflösung der Gleichungen. Math. Ann. 1870, 2, 317–365. [Google Scholar] [CrossRef]
- Hansen, E.; Patrick, M. A family of root finding methods. Numer. Math. 1977, 27, 257–269. [Google Scholar] [CrossRef]
- Dong, C. A family of multipoint iterative functions for finding multiple roots of equations. Int. J. Comput. Math. 1987, 21, 363–367. [Google Scholar] [CrossRef]
- Li, S.; Liao, X.; Cheng, L. A new fourth-order iterative method for finding multiple roots of nonlinear equations. Appl. Math. Comput. 2009, 215, 1288–1292. [Google Scholar]
- Li, S.G.; Cheng, L.Z.; Neta, B. Some fourth-order nonlinear solvers with closed formulae for multiple roots. Comput. Math. Appl. 2010, 59, 126–135. [Google Scholar] [CrossRef]
- Sharma, J.R.; Sharma, R. Modified Jarratt method for computing multiple roots. Appl. Math. Comput. 2010, 217, 878–881. [Google Scholar] [CrossRef]
- Zhou, X.; Chen, X.; Song, Y. Constructing higher-order methods for obtaining the multiple roots of nonlinear equations. J. Comput. Appl. Math. 2011, 235, 4199–4206. [Google Scholar] [CrossRef]
- Sharifi, M.; Babajee, D.K.R.; Soleymani, F. Finding the solution of nonlinear equations by a class of optimal methods. Comput. Math. Appl. 2012, 63, 764–774. [Google Scholar] [CrossRef]
- Soleymani, F.; Babajee, D.K.R.; Lotfi, T. On a numerical technique for finding multiple zeros and its dynamics. J. Egypt. Math. Soc. 2013, 21, 346–353. [Google Scholar] [CrossRef]
- Geum, Y.H.; Kim, Y.I.; Neta, B. A class of two-point sixth-order multiple-zero finders of modified double-Newton type and their dynamics. Appl. Math. Comput. 2015, 270, 387–400. [Google Scholar] [CrossRef]
- Geum, Y.H.; Kim, Y.I.; Neta, B. Constructing a family of optimal eighth-order modified Newton-type multiple-zero finders along with the dynamics behind their purely imaginary extraneous fixed points. J. Comp. Appl. Math. 2018, 333, 131–156. [Google Scholar] [CrossRef]
- Kansal, M.; Kanwar, V.; Bhatia, S. On some optimal multiple root-finding methods and their dynamics. Appl. Appl. Math. 2015, 10, 349–367. [Google Scholar]
- Behl, R.; Alsolami, A.J.; Pansera, B.A.; Al-Hamdan, W.M.; Salimi, M.; Ferrara, M. A new optimal family of Schrder’s method for multiple zeros. Mathematics 2019, 7, 1076. [Google Scholar] [CrossRef]
- Behl, R.; Salimi, M.; Ferrara, M.; Sharifi, S.; Alharbi, S.K. Some real-life applications of a newly constructed derivative free iterative scheme. Symmetry 2019, 11, 239. [Google Scholar] [CrossRef]
- Traub, J.F. Iterative Methods for the Solution of Equations; Chelsea Publishing Company: New York, NY, USA, 1982. [Google Scholar]
- Kumar, D.; Sharma, J.R.; Argyros, I.K. Optimal one-point iterative function free from derivatives for multiple roots. Mathematics 2020, 8, 709. [Google Scholar] [CrossRef]
- Sharma, J.R.; Kumar, S.; Jäntschi, L. On a class of optimal fourth order multiple root solvers without using derivatives. Symmetry 2019, 11, 1452. [Google Scholar] [CrossRef]
- Sharma, J.R.; Kumar, S.; Argyros, I.K. Development of optimal eighth order derivative-free methods for multiple roots of nonlinear equations. Symmetry 2019, 11, 766. [Google Scholar] [CrossRef]
- Kung, H.T.; Traub, J.F. Optimal order of one-point and multipoint iteration. J. Assoc. Comput. Mach. 1974, 21, 643–651. [Google Scholar] [CrossRef]
- Wolfram, S. The Mathematica Book, 5th ed.; Wolfram Media: Champaign, IL, USA, 2003. [Google Scholar]
- Vrscay, E.R.; Gilbert, W.J. Extraneous fixed points, basin boundaries and chaotic dynamics for Schröder and König rational iteration functions. Numer. Math. 1988, 52, 1–16. [Google Scholar] [CrossRef]
- Varona, J.L. Graphic and numerical comparison between iterative methods. Math. Intell. 2002, 24, 37–46. [Google Scholar] [CrossRef]
- Jézéquel, F. Dynamical Control of Approximation Methods; Habilitationa diriger des recherches, Universit Pierre et Marie Curie: Paris, France, 2005. [Google Scholar]
- Chand, P.B.; Chicharro, F.I.; Jain, P. Optimal fourth-order Weerakoon-Fernando-type methods for multiple roots and their dynamics. Mediterr. J. Math. 2019, 16, 67. [Google Scholar] [CrossRef]
- Geum, Y.H.; Kim, Y.I.; Magreñán, Á.A. A study of dynamics via Möbius conjugacy map on a family of sixth-order modified Newton-like multiple-zero finders with bivariate polynomial weight functions. J. Comput. Appl. Math. 2018, 344, 608–623. [Google Scholar] [CrossRef]
- Behl, R.; Cordero, A.; Motsa, S.; Torregrosa, J.R. On developing fourth-order optimal families of methods for multiple roots and their dynamics. Appl. Math. Comput. 2018, 265, 520–532. [Google Scholar] [CrossRef]
- Sidorov, N.; Sidorov, D.; Li, Y. Basins of attraction and stability of nonlinear systems’ equilibrium points. Differ. Equ. Dyn. Syst. 2019. [Google Scholar] [CrossRef]
- Neta, B.; Scott, M.; Chun, C. Basin attractors for various methods for multiple roots. App. Math. Comp. 2012, 218, 5043–5066. [Google Scholar] [CrossRef]
- Cordero, A.; Torregrosa, J.R. Variants of Newtons method using fifth order quadrature formulas. Appl. Math. Comput. 2007, 190, 686–698. [Google Scholar]
- Bradie, B. A Friendly Introduction to Numerical Analysis; Pearson Education Inc.: New Delhi, India, 2006. [Google Scholar]
- Hoffman, J.D. Numerical Methods for Engineers and Scientists; McGraw-Hill Book Company: New York, NY, USA, 1992. [Google Scholar]



{kind=link}
{kind=link}
| Methods | k | ACOC | CPU | |||
|---|---|---|---|---|---|---|
| LM−1 | 6 | 4.000 | 0.0776 | |||
| LM−2 | 6 | 4.000 | 0.0942 | |||
| SSM | 6 | 4.000 | 0.0782 | |||
| ZM | 6 | 4.000 | 0.0634 | |||
| SM | 6 | 4.000 | 0.0935 | |||
| KM | 6 | 4.000 | 0.0624 | |||
| SM−1 | 6 | 4.000 | 0.0724 | |||
| SM−2 | 6 | 4.000 | 0.0745 | |||
| NM | 5 | 4.000 | 0.0615 |
| Methods | k | ACOC | CPU | |||
|---|---|---|---|---|---|---|
| LM−1 | 4 | 4.000 | 0.8274 | |||
| LM−2 | 4 | 4.000 | 1.1072 | |||
| SSM | 4 | 4.000 | 1.1076 | |||
| ZM | 4 | 4.000 | 1.1066 | |||
| SM | 4 | 4.000 | 1.2947 | |||
| KM | 4 | 4.000 | 1.0952 | |||
| SM−1 | 3 | 0 | 4.000 | 0.3284 | ||
| SM−2 | 3 | 0 | 4.000 | 0.3375 | ||
| NM | 3 | 0 | 4.000 | 0.3124 |
| Methods | k | ACOC | CPU | |||
|---|---|---|---|---|---|---|
| LM−1 | 4 | 4.000 | 1.6382 | |||
| LM−2 | 4 | 4.000 | 1.7935 | |||
| SSM | 4 | 4.000 | 1.9031 | |||
| ZM | 4 | 4.000 | 1.8720 | |||
| SM | 4 | 4.000 | 1.9655 | |||
| KM | 4 | 4.000 | 1.9026 | |||
| SM−1 | 4 | 4.000 | 1.4802 | |||
| SM−2 | 4 | 4.000 | 1.4922 | |||
| NM | 4 | 4.000 | 1.4656 |
| Methods | k | ACOC | CPU | |||
|---|---|---|---|---|---|---|
| LM−1 | 4 | 4.000 | 1.4512 | |||
| LM−2 | 4 | 4.000 | 2.2314 | |||
| SSM | 4 | 4.000 | 2.2615 | |||
| ZM | 4 | 4.000 | 2.3088 | |||
| SM | 4 | 4.000 | 2.7610 | |||
| KM | 4 | 4.000 | 2.2926 | |||
| SM−1 | 4 | 4.000 | 0.7223 | |||
| SM−2 | 4 | 4.000 | 0.7407 | |||
| NM | 4 | 4.000 | 0.5931 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, S.; Kumar, D.; Sharma, J.R.; Cesarano, C.; Agarwal, P.; Chu, Y.-M. An Optimal Fourth Order Derivative-Free Numerical Algorithm for Multiple Roots. Symmetry 2020, 12, 1038. https://doi.org/10.3390/sym12061038
Kumar S, Kumar D, Sharma JR, Cesarano C, Agarwal P, Chu Y-M. An Optimal Fourth Order Derivative-Free Numerical Algorithm for Multiple Roots. Symmetry. 2020; 12(6):1038. https://doi.org/10.3390/sym12061038
Chicago/Turabian StyleKumar, Sunil, Deepak Kumar, Janak Raj Sharma, Clemente Cesarano, Praveen Agarwal, and Yu-Ming Chu. 2020. "An Optimal Fourth Order Derivative-Free Numerical Algorithm for Multiple Roots" Symmetry 12, no. 6: 1038. https://doi.org/10.3390/sym12061038
APA StyleKumar, S., Kumar, D., Sharma, J. R., Cesarano, C., Agarwal, P., & Chu, Y.-M. (2020). An Optimal Fourth Order Derivative-Free Numerical Algorithm for Multiple Roots. Symmetry, 12(6), 1038. https://doi.org/10.3390/sym12061038