Pattern Recognition of Single-Channel sEMG Signal Using PCA and ANN Method to Classify Nine Hand Movements


 ,
,  and
and
Abstract
1. Introduction
- The acquisition of one-channel sEMG was carried out with a sampling rate of 1 kHz. The acquired signals were processed using 13-time domain and 3-frequency domain features that made them easier to process.
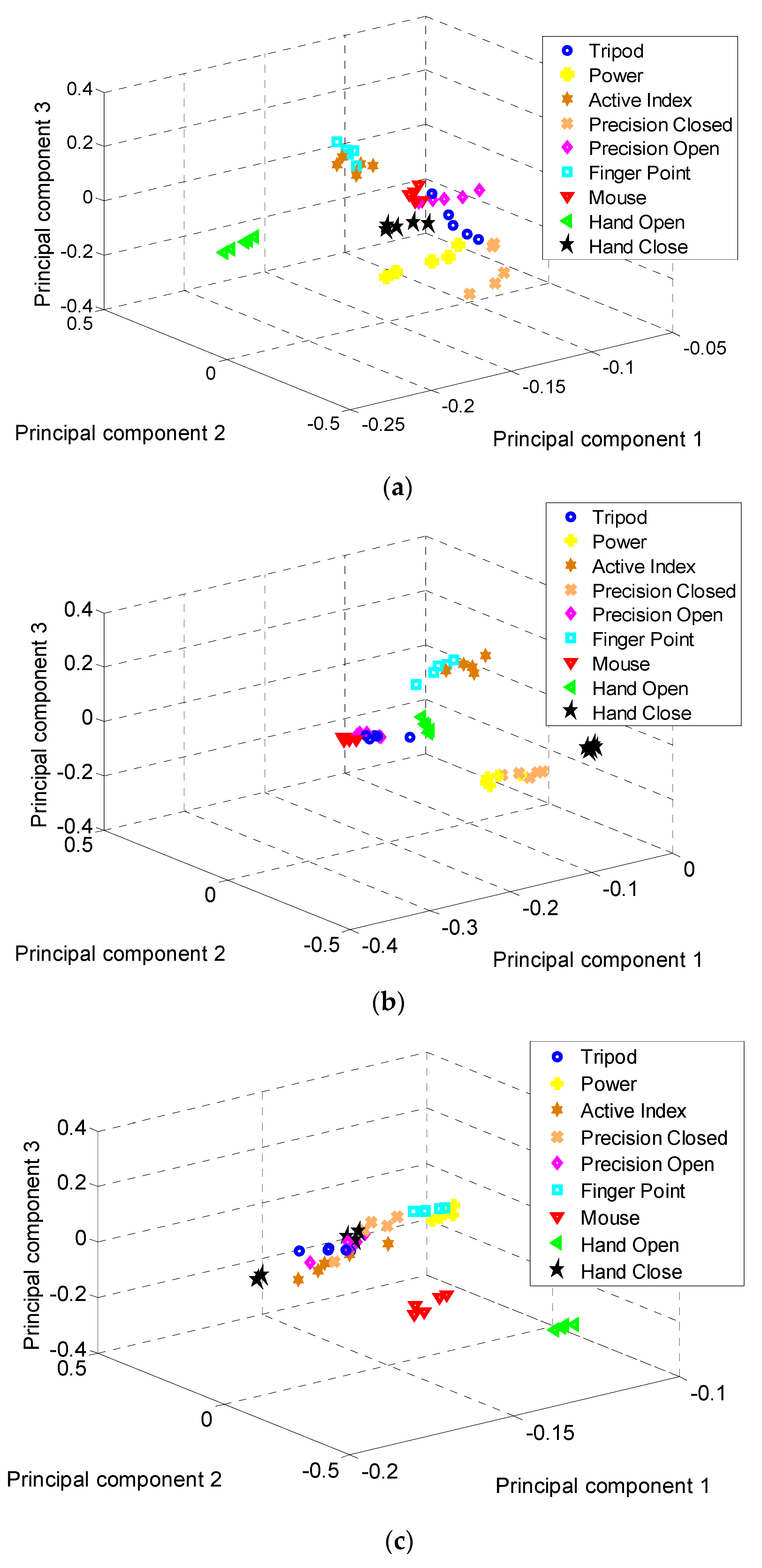
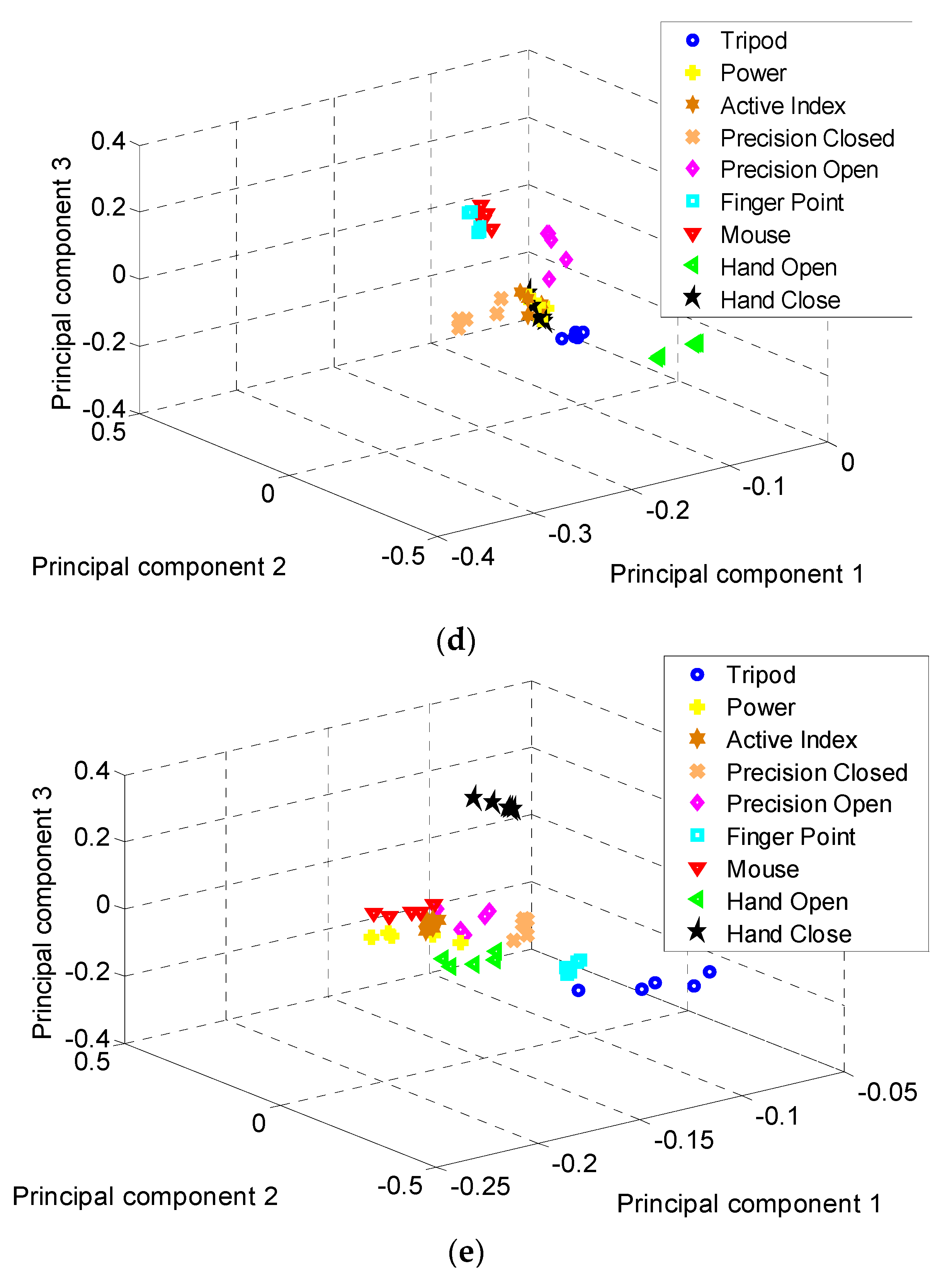
- All 16-features were reduced using PCA into two and three-dimensional space before processing to the classifier. The results from PCA could clearly show the separated pattern in 3-dimensional space for each subject.
- The proposed method was able to differentiate nine-classes of hand gestures with higher accuracy, especially for each subject classification.
2. Related Work
3. Methods
3.1. Feature Extraction
- SSI (simple square integral) or integral square is a feature that calculates the energy of the EMG signal [23]:
- DASDV (difference absolute standard deviation value): DASDV is a standard deviation value of the wavelength [26]:where a digitized sEMG signal in Equations (1)–(9) contains samples x1, x2, … xN and N refers to the number of samples of each digitized sEMG signal.
- Hjorth 1 (Activity): Hjorth 1 measures the surface of power spectrum in the frequency domain [27].
- Hjorth 2 (Mobility): Hjorth 2 calculates the mean frequency, or the standard deviation of the power spectrum [27]:
- Hjorth 3 (Complexity): Hjorth 3 measures the change in frequency by comparing the signal’s similarity to a pure sine wave [26]:
3.2. Feature Reduction: Principal Component Analysis (PCA)
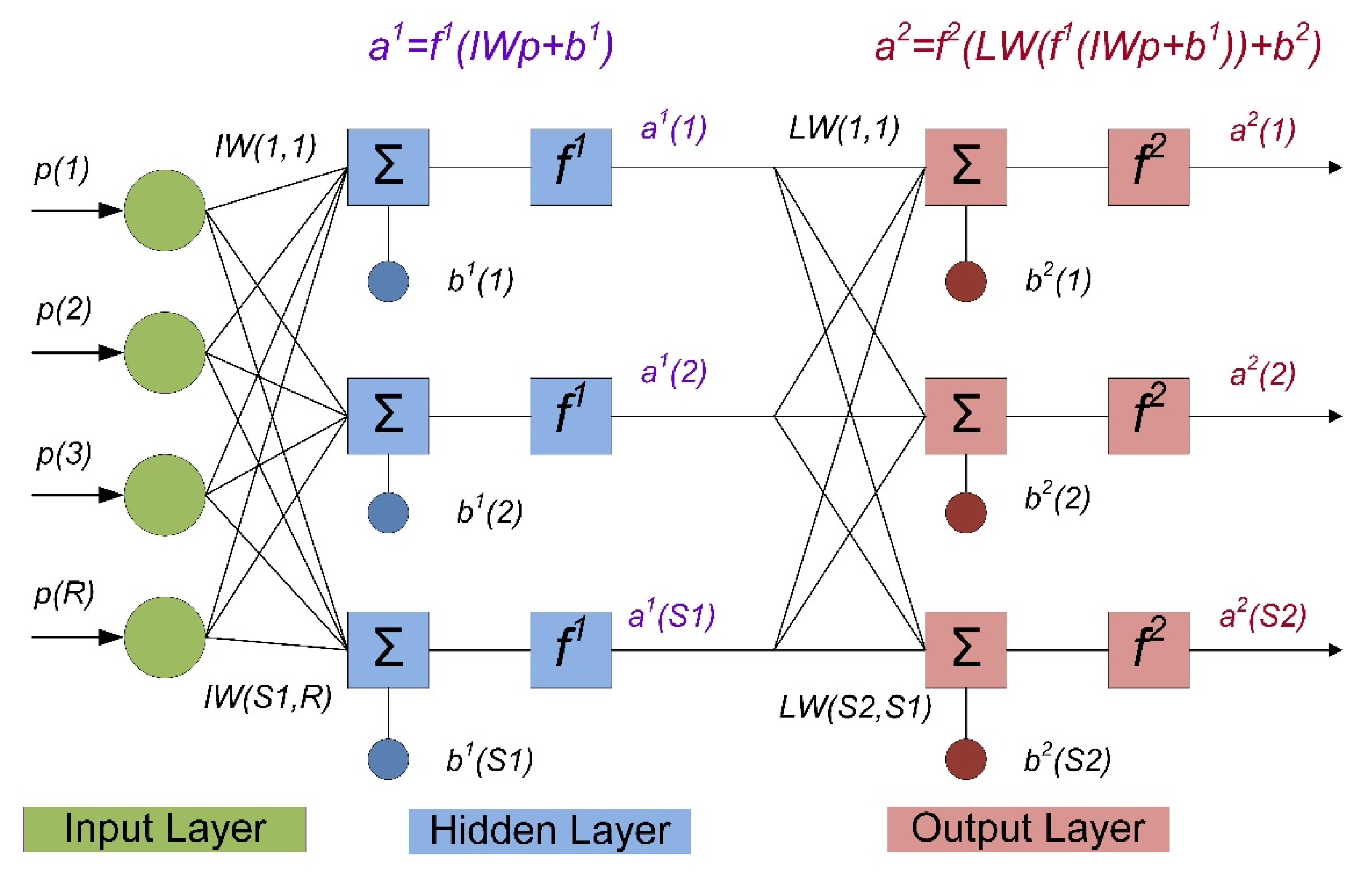
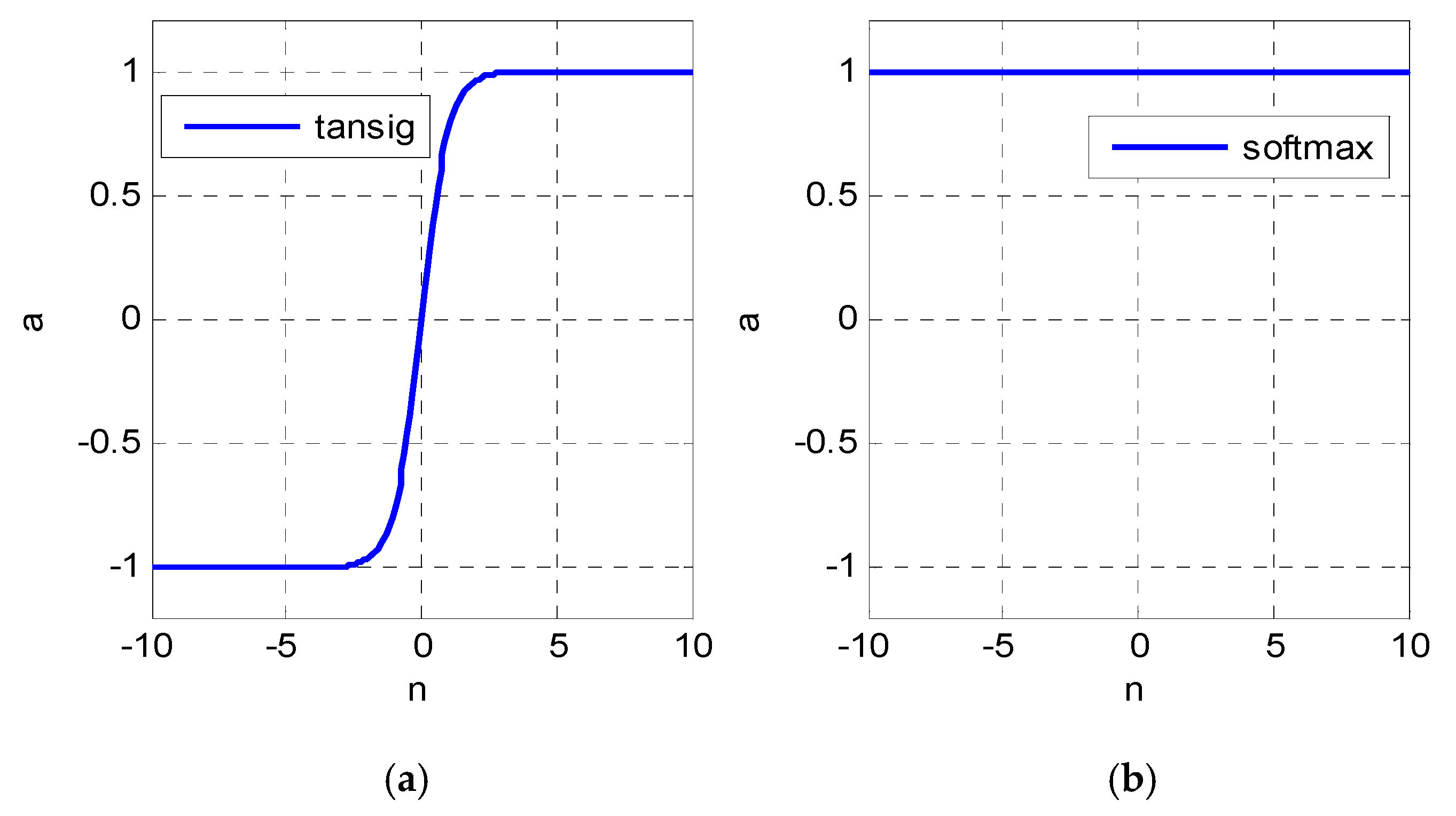
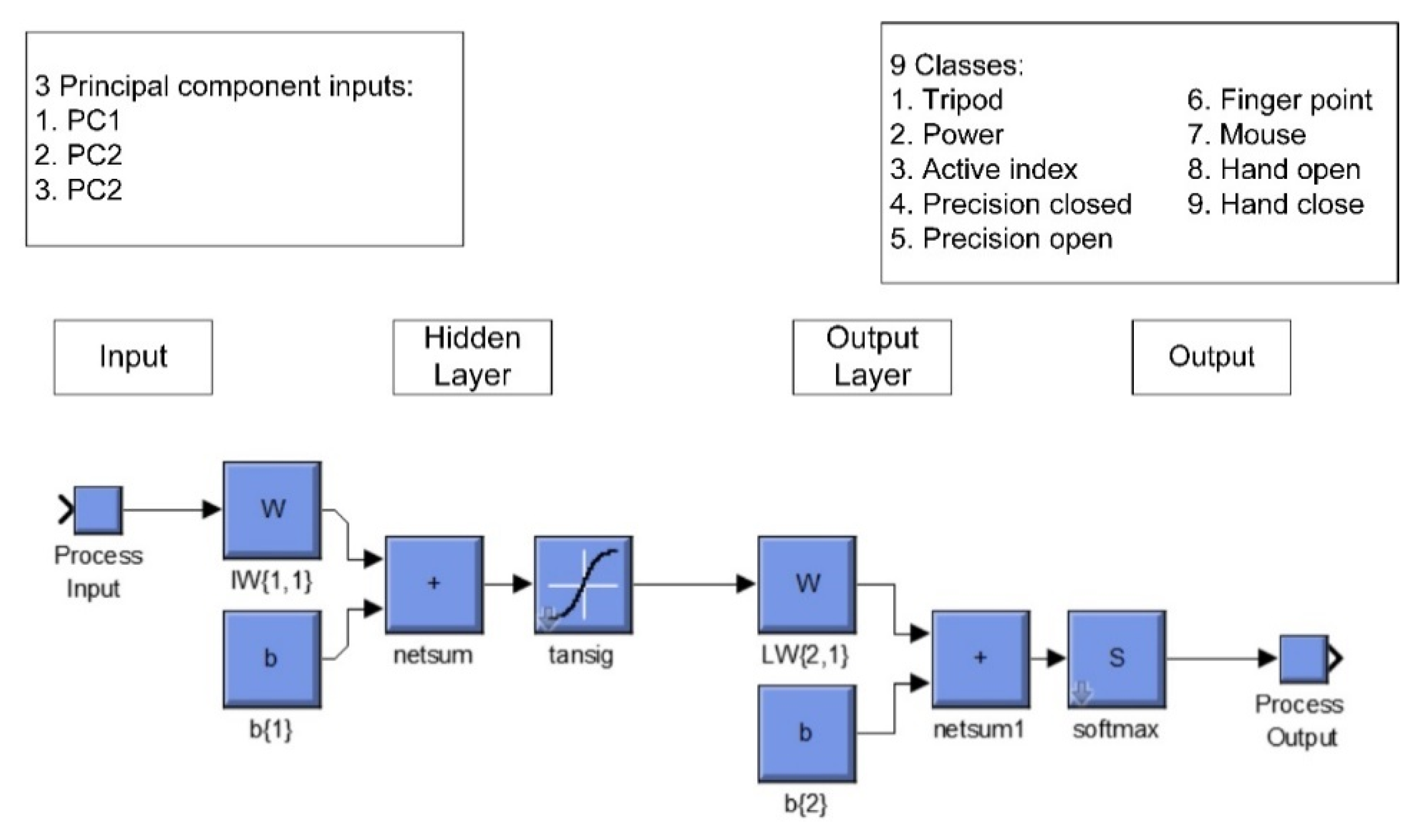
3.3. Feature Classification: Artificial Neural Network (ANN)
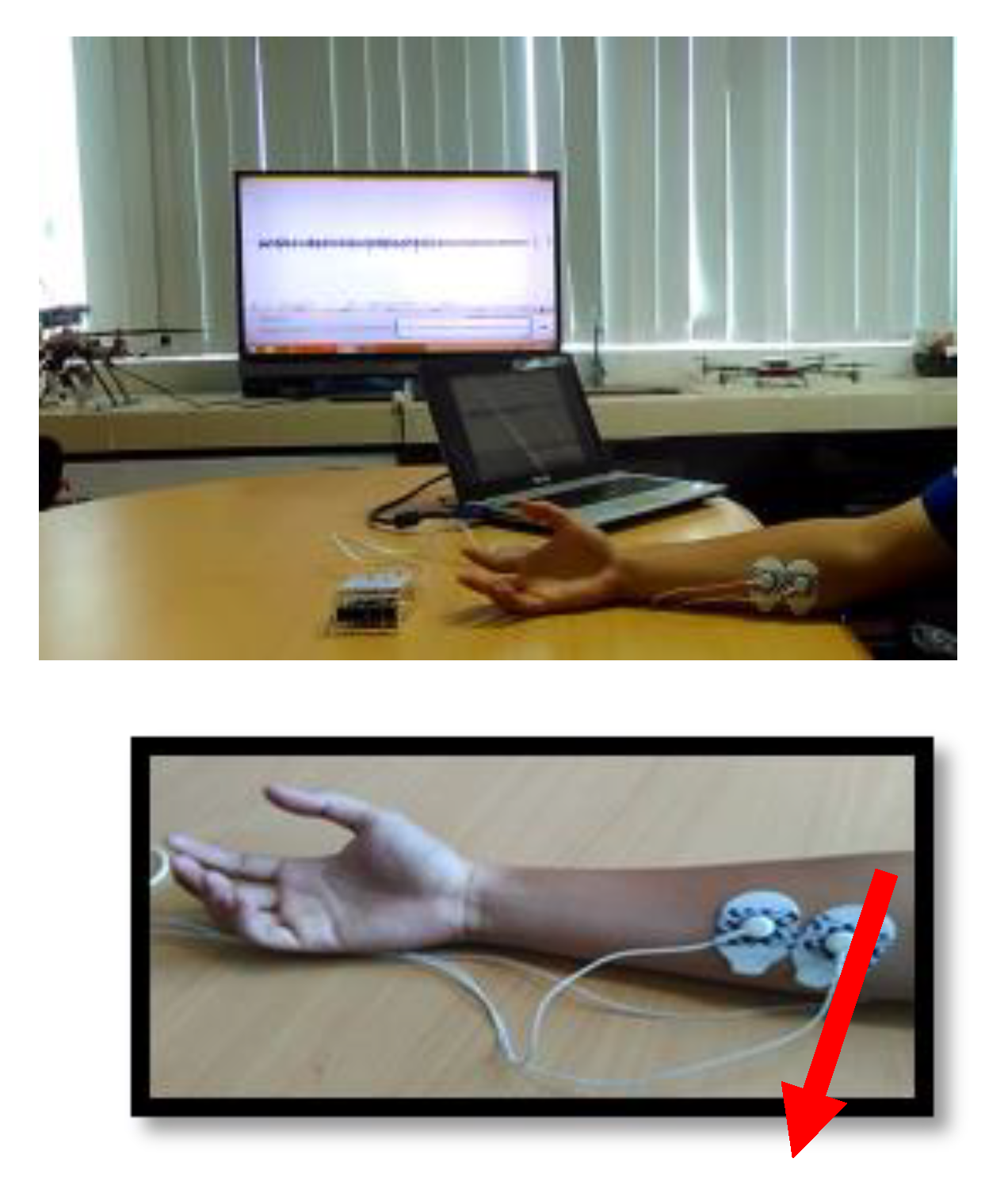
3.4. Experimental Setup
4. Results and Discussion
4.1. Principle Component Analysis (PCA)
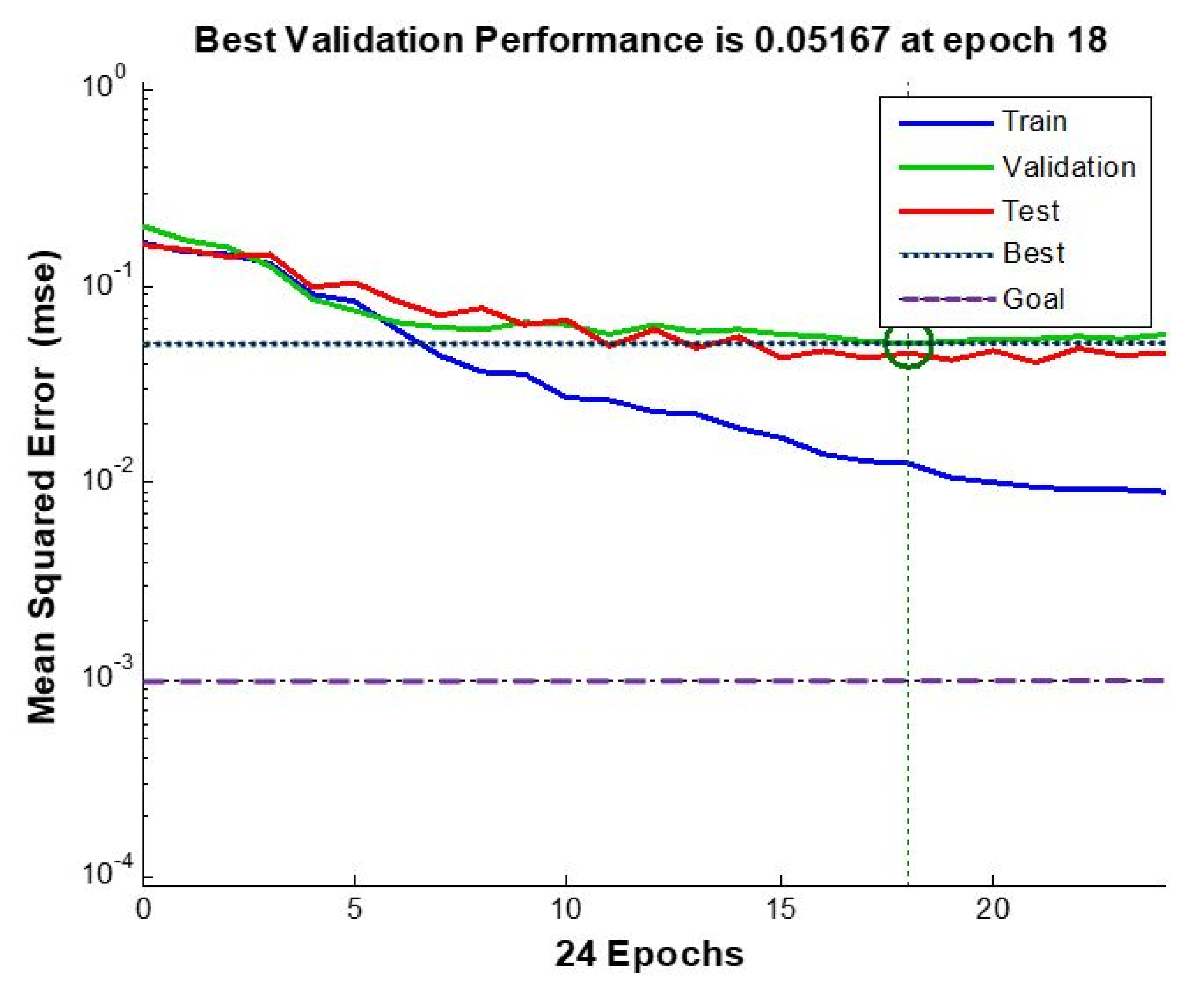
4.2. Artificial Neural Network (ANN)
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Carmona, G.A.; Hoffmeyer, P.; Herrmann, F.R.; Vaucher, J.; Tschopp, O.; Lacraz, A.; Vischer, U.M. Major lower limb amputations in the elderly observed over ten years: The role of diabetes and peripheral arterial disease. Diabetes Metab. 2005, 31, 449–454. [Google Scholar] [CrossRef]
- Ministry of Health, the Republic of Indonesia. Health Profile of Indonesia 2017. Available online: http://www.depkes.go.id/resources/download/pusdatin/profil-kesehatan-indonesia/profil-kese-hatan-indonesia-2007.pdf (accessed on 23 October 2018). (In Indonesian)
- Tribunnews, Indonesian Newspaper. At RSC, 35% Diabetic Patients were Amputated. Available online: Shttp://www.tribunnews.com/kesehatan/2011/11/03/di-rscm-35-persen-penderita-diabetes-diamputasi (accessed on 23 October 2018). (In Indonesian).
- Ministry of Health, the Republic of Indonesia. Basic Health Research. Available online: http://www.depkes.go.id/resources/download/general/Hasil%20Riskesdas%202013.pdf (accessed on 23 October 2018). (In Indonesian)
- Ariyanto, M.; Caesarendra, W.; Mustaqim, K.A.; Irfan, M.; Pakpahan, J.A.; Setiawan, J.D.; Winoto, A.R. Finger movement pattern recognition method using artificial neural network based on electromyography (EMG) sensor. In Proceedings of the 2015 International Conference on Automation, Cognitive Science, Optics, Micro Electro-Mechanical System, and Information Technology (ICACOMIT), Bandung, Indonesia, 29–30 October 2015; pp. 12–17. [Google Scholar]
- Xing, K.; Yang, P.; Huang, J.; Wang, Y.; Zhu, Q. A real-time EMG pattern recognition method for virtual myoelectric hand control. Neurocomputing 2014, 136, 345–355. [Google Scholar] [CrossRef]
- Riillo, F.; Quitadamo, L.; Cavrini, F.; Gruppioni, E.; Pinto, C.; Pastò, N.C.; Sbernini, L.; Albero, L.; Saggio, G. Optimization of EMG-based hand gesture recognition: Supervised vs. unsupervised data preprocessing on healthy subjects and transradial amputees. Biomed. Signal Process. Control. 2014, 14, 117–125. [Google Scholar] [CrossRef]
- Phinyomark, A.; Phukpattaranont, P.; Limsakul, C. Feature reduction and selection for EMG signal classification. Expert Syst. Appl. 2012, 39, 7420–7431. [Google Scholar] [CrossRef]
- Khushaba, R.; Kodagoda, S.; Takruri, M.; Dissanayake, G. Toward improved control of prosthetic fingers using surface electromyogram (EMG) signals. Expert Syst. Appl. 2012, 39, 10731–10738. [Google Scholar] [CrossRef]
- Balbinot, A.; Favieiro, G. A Neuro-Fuzzy System for Characterization of Arm Movements. Sensors 2013, 13, 2613–2630. [Google Scholar] [CrossRef] [PubMed]
- Mane, S.; Kambli, R.; Kazi, F.; Singh, N. Hand Motion Recognition from Single Channel Surface EMG Using Wavelet & Artificial Neural Network. Procedia Comput. Sci. 2015, 49, 58–65. [Google Scholar]
- Lu, Y.; Ju, Z.; Liu, Y.; Shen, Y.; Liu, H. Time series modeling of surface EMG based hand manipulation identification via expectation maximization algorithm. Neurocomputing 2015, 168, 661–668. [Google Scholar] [CrossRef]
- Coelho, A.; Lima, C. Assessing fractal dimension methods as feature extractors for EMG signal classification. Eng. Appl. Artif. Intell. 2014, 36, 81–98. [Google Scholar] [CrossRef]
- Shin, S.; Langari, R.; Langari, R. A performance comparison of hand motion EMG classification. In Proceedings of the 2nd Middle East Conference on Biomedical Engineering, Doha, Qatar, 17–20 February 2014; pp. 353–356. [Google Scholar]
- Wu, Y.; Liang, S.; Zhang, L.; Chai, Z.; Cao, C.; Wang, S. Gesture recognition method based on a single-channel sEMG envelope signal. EURASIP J. Wirel. Commun. Netw. 2018, 2018, 35. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, Y.; Zhang, Z.; Fang, Y.; Liu, H.; Yao, C. Exploring the relation between EMG sampling frequency and hand motion recognition accuracy. In Proceedings of the 2017 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Banff, AB, Canada, 5–8 October 2017; pp. 1139–1144. [Google Scholar]
- Phinyomark, A.; Quaine, F.; Charbonnier, S.; Serviere, C.; Tarpin-Bernard, F.; Laurillau, Y. EMG feature evaluation for improving myoelectric pattern recognition robustness. Expert Syst. Appl. 2013, 40, 4832–4840. [Google Scholar] [CrossRef]
- Tkach, D.; Huang, H.; Kuiken, T. A Study of stability of time-domain features for electromyographic pattern recognition. J. Neuro Eng. Rehabil. 2010, 7, 21. [Google Scholar] [CrossRef] [PubMed]
- Zardoshti-Kermani, M.; Wheeler, B.; Badie, K.; Hashemi, R. EMG feature evaluation for movement control of upper extremity prostheses. IEEE Trans. Rehabil. Eng. 1995, 3, 324–333. [Google Scholar] [CrossRef]
- Hudgins, B.; Parker, P.; Scott, R. A new strategy for multifunction myoelectric control. IEEE Trans. Biomed. Eng. 1993, 40, 82–94. [Google Scholar] [CrossRef] [PubMed]
- Oskoei, M.A.; Hu, H. Support Vector Machine-Based Classification Scheme for Myoelectric Control Applied to Upper Limb. IEEE Trans. Biomed. Eng. 2008, 55, 1956–1965. [Google Scholar] [CrossRef] [PubMed]
- Phinyomark, A.; Limsakul, C.; Phukpattaranont, P. A Novel Feature Extraction for Robust EMG pattern Recognition. Available online: https://arxiv.org/abs/0912.3973 (accessed on 19 January 2020).
- Du, S.; Vuskovic, M. Temporal vs. spectral approach to feature extraction from prehensile EMG signals. In Proceedings of the 2004 IEEE International Conference on Information Reuse and Integration, Las Vegas Hilton, NV, USA, 8–10 November 2004; pp. 344–350. [Google Scholar]
- Park, S.-H.; Lee, S.-P. EMG pattern recognition based on artificial intelligence techniques. IEEE Trans. Rehabil. Eng. 1998, 6, 400–405. [Google Scholar] [CrossRef] [PubMed]
- Boostani, R.; Moradi, M.H. Evaluation of the forearm EMG signal features for the control of a prosthetic hand. Physiol. Meas. 2003, 24, 309–319. [Google Scholar] [CrossRef] [PubMed]
- Kim, K.S.; Choi, H.H.; Moon, C.S.; Mun, C.W. Comparison of k-nearest neighbor, quadratic discriminant and linear discriminant analysis in classification of electromyogram signals based on the wrist-motion directions. Curr. Appl. Phys. 2011, 11, 740–745. [Google Scholar] [CrossRef]
- Rangayyan, R.M. Biomedical Signal Analysis: Case-Study Approach; Wiley: New York, NY, USA, 2002. [Google Scholar]
- Yang, B.S.; Widodo, A. Introduction of Intelligent Machine Fault Diagnosis and Prognosis; Nova Science Publishers: New York, NY, USA, 2009. [Google Scholar]
- Richards, L.E.; Jolliffe, I.T. Principal Component Analysis. J. Mark. Res. 1988, 25, 410. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Selected Literature | No. of Finger Movements | Feature Extraction | Classification Algorithm | EMG Channel/Fs | Accuracy of Classification |
|---|---|---|---|---|---|
| Ariyanto et al. (2015) [5] | 5 (thumb, little, ring, middle, index) | 16 (IEMG, SSI, VAR, RMS, WL, MAV, MAV1, MAV2 DASDV, AR, Hjorth1, Hjorth2, Hjorth3) | ANN | 1 channel/4 kHz | 96.7% |
| Xing et al. (2014) [6] | 7 (unknown finger movement) | Wavelet package transform (WPT) WPT | SVM KNN | 4 channel/1024 Hz | 98.39% 97.5% |
| Riillo et al. (2014) [7] | 5 (rest, fist, pinch, spread, pointing) | RMS-WA Willison Amplitudo (WA) M-RMS-(WA) | ANN ANN | 6 channel/1 kHz | 88% 89% |
| Phinyomark et al. (2012) [8] | 6 (hand open, hand close, wrist extension, wrist flex, forearm pronation, forearm supination) | IEMG, MAV, MAV1, MAV2, SSI, VAR, Absolute Temporal Moment 3 (TM3), TM4, TM5, RMS, v-order (V), Log detector (LOG), WL, Average amplitude change (AAC), DASDV, Zero crossing (ZC), Amplitude of the first burst (AFB), Myopulse percentage rate (MYOP), Willison amplitude (WAMP), Slope sign change (SSC), Mean absolute value slope (MAVSLP), Multiple hamming windows (MHW), Multiple trapezoidal windows (MTW), Histogram (HIST), AR, Cepstral coefficients (CC), Total power (TTP), Spectral moment 1 (SM1), Spectral moment 2 (SM2), Spectral moment 3 (SM3), Mean frequency (MNF), Median frequency (MDF), Peak frequency (PKF), Mean power (MNP), Frequency ratio (FR), Power spectrum ratio (PSR), Variance of central frequency (VCF) | SVM KNN | 2 channel/1 kHz | 98.39% 97.5% |
| Kushaba et al. (2012) [9] | 10 (thumb, index, middle, ring, little, thumb-index, thumb little, thumb-ring, thumb-middle, hand close) | Slope sign change (SSC), ZC, WL, AR, Hjorth parameters, Amady and Horwat, Sample Skewness (SS), AR | LIBSVM KNN | 2 channel/4 kHz | Approx. 92% Approx. 91% |
| Balbinot et al. (2013) [10] | 7 (hand contraction, forearm rotation, hand abduction, hand adduction, wrist extension, wrist flexion, forearm flexion,) | RMS | Neuro-Fuzzy | 8 channel/1 kHz | 86% |
| Mane et al. (2015) [11] | 3 (open hand, close hand, wrist extensor) | WPT | ANN | 1 channel/1 kHz | 93.25% |
| Lu et al. (2015) [12] | 10 (open mobile phone, screw open bottle, take a coin and move to the palm, screw to open a big bottle using all five finger, roll a small cylinder, pick up a scissor and cut paper, pencil flips, remove the pencil from back of front for writing, pick up a pencil and simply rotate to write, pick up a pencil and complexly rotate to write. | AR, the autoregressive moving average (ARMA), integrated moving average (ARIMA), Wavelet, RMS, WAMP, motor unit action potential (MUAP) | Expectation Maximation (EM) | 16 channel/NA | 95% |
| Coelho et al. (2014) [13] | 6 (unknown finger postures) | Fractal dimension | NA | 8 channel/3 kHz | NA |
| Shin et al. (2014) [14] | 6 (hand close, hand open, forearm pronation, forearm supination, wrist flexion, wrist extension, rest state) | TD, MAV, WL, ZC, SSC, AR4, RMS, AR6, AR4, AR6 | SVM | 2 channel/1 kHz | NA |
| Wu et al. (2018) [15] | 5 (bend wrist down, bend wrist up, bend wrist down while in shake hand, bend wrist up while in shake hand, fist) | short time energy (EK), T (activity duration), EK, TH, T (activity duration), IEMG, MAV, VAR, SD, E, MAX, SSC, SK, KU | KNN SVM | 1 channel/2 kHz | 75.8% (KNN) 79.8% (SVM) |
| Advantages | Disadvantages |
|---|---|
| Because it utilizes only one-channel of the sEMG sensor, the acquisition can be reduced in terms of cost and complexity. | The placement of the sEMG sensor pad needs to be attached carefully and correctly. |
| The algorithm for feature computation is easy to compute and has a faster processing speed because most of the features use time domain features. | It needs sixteen features before they can be reduced into two or three features using PCA dimension reduction. |
| The acquisition uses a sampling rate of 1000 Hz for discriminating nine hand gestures. | The wireless data acquisition needs Bluetooth 3.0 technology and above. |
| Subject | Sex | Age (years) | Height (cm) | Weight (kg) | Hand |
|---|---|---|---|---|---|
| Subject 1 | Female | 30 | 164 | 60 | Right |
| Subject 2 | Female | 21 | 165 | 61 | Right |
| Subject 3 | Male | 22 | 169 | 70 | Right |
| Subject 4 | Male | 21 | 168 | 69 | Left |
| Subject 5 | Male | 35 | 168 | 70 | Right |
| Finger Movement | Image | Example of EMG Signal |
|---|---|---|
| 1. Tripod |  |  |
| 2. Power |  |  |
| 3. Active index |  |  |
| 4. Precision closed |  |  |
| 5. Precision open |  |  |
| 6. Finger point |  |  |
| 7. Mouse |  |  |
| 8. Hand open |  |  |
| 9. Hand closed |  |  |
| Utilized PCs | ANN Accuracy Results (%) | |||
|---|---|---|---|---|
| Training | Validation | Testing | Overall | |
| All PC (PC1–PC3) | 92.4 | 70.6 | 76.9 | 86.7 |
| Selected PCs | 75.2 | 50 | 58.8 | 68.9 |
| Selected PCs | Subject | ANN Accuracy Results (%) | |||
|---|---|---|---|---|---|
| Training | Validation | Testing | Overall | ||
| All PCs (PC1–PC3) | 1 | 64.5 | 42.9 | 57.1 | 60 |
| All PCs (PC1–PC3) | 2 | 38.7 | 57.1 | 14.3 | 37.8 |
| All PCs (PC1–PC3) | 3 | 96.8 | 85.7 | 71.4 | 91.1 |
| All PCs (PC1–PC3) | 4 | 90.3 | 57.1 | 57.1 | 80 |
| All PCs (PC1–PC3) | 5 | 100 | 100 | 85.7 | 97.8 |
| PC2–PC3 | 1 | 96.8 | 100 | 85.7 | 95.6 |
| PC2–PC3 | 2 | 100 | 57.1 | 71.4 | 88.9 |
| PC2–PC3 | 3 | 93.5 | 85.7 | 57.1 | 86.7 |
| PC2–PC3 | 4 | 100 | 85.7 | 71.4 | 93.3 |
| PC2–PC3 | 5 | 100 | 100 | 100 | 100 |
| Finger Movement | Features Extraction | Classification Algorithm | EMG Channel/Fs | Accuracy of Classification |
|---|---|---|---|---|
| 9 (tripod, power, active index, precision closed, precision open, finger point, mouse, hand open, hand closed) | 16 (IEMG, MAV, MAV1, MAV2, SSI, VAR, RMS, WL, DASDV, AR, Hjorth1, Hjorth2, Hjorth3) | ANN | 1 channel/1 kHz | 86.7% for all subject average 92.9% using selected PC for an individual subject |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arozi, M.; Caesarendra, W.; Ariyanto, M.; Munadi, M.; Setiawan, J.D.; Glowacz, A. Pattern Recognition of Single-Channel sEMG Signal Using PCA and ANN Method to Classify Nine Hand Movements. Symmetry 2020, 12, 541. https://doi.org/10.3390/sym12040541
Arozi M, Caesarendra W, Ariyanto M, Munadi M, Setiawan JD, Glowacz A. Pattern Recognition of Single-Channel sEMG Signal Using PCA and ANN Method to Classify Nine Hand Movements. Symmetry. 2020; 12(4):541. https://doi.org/10.3390/sym12040541
Chicago/Turabian StyleArozi, Moh, Wahyu Caesarendra, Mochammad Ariyanto, M. Munadi, Joga D. Setiawan, and Adam Glowacz. 2020. "Pattern Recognition of Single-Channel sEMG Signal Using PCA and ANN Method to Classify Nine Hand Movements" Symmetry 12, no. 4: 541. https://doi.org/10.3390/sym12040541
APA StyleArozi, M., Caesarendra, W., Ariyanto, M., Munadi, M., Setiawan, J. D., & Glowacz, A. (2020). Pattern Recognition of Single-Channel sEMG Signal Using PCA and ANN Method to Classify Nine Hand Movements. Symmetry, 12(4), 541. https://doi.org/10.3390/sym12040541