1. Introduction
Solving nonlinear problems is very important in numerical analysis and finds many applications in physics, engineering, and other applied sciences [
1,
2]. These problems occur in a variety of areas such as initial and boundary values, heat and fluid flow, electrostatics, or even in global positioning systems (GPS) [
3,
4,
5,
6]. It is difficult to find analytical solutions for nonlinear problems, but numerical techniques may be used to obtain approximate solutions. Therefore, iterative schemes provide an attractive alternative to solve such problems. When we discuss iterative solvers for finding multiple roots of nonlinear equations of the form
, where
is a real function defined in a domain
, we recall the classical modified Newton’s method [
1,
2,
7] (also known as Rall’s algorithm), given by:
where
m is the multiplicity of the required solution. Given the multiplicity
, in advance, the algorithm converges quadratically for multiple roots. We find one-point iterative functions in the literature, but in the scope of the real world, they are not of practical interest because of their theoretical limitations regarding convergence order and the efficiency index. Moreover, most of the one-point techniques are computationally expensive and inefficient when they are tested on numerical examples. Therefore, multipoint iterative algorithms are better candidates to qualify as efficient solvers. The good thing about multipoint iterative schemes without memory for scalar nonlinear equations is that we can establish a conjecture about their convergence order. According to the Kung–Traub conjecture [
1], any multipoint method without memory can reach its convergence order of at most
for
n functional evaluations. A number of researchers proposed various optimal fourth-order techniques (requiring three functional evaluations per iteration) [
8,
9,
10,
11,
12,
13] and non-optimal approaches [
14,
15] for approximating multiple zeros of nonlinear functions. Nonetheless, a limited number of multipoint point iterative algorithms having a sixth-order of convergence were formulated. Thukral [
16] proposed the following sixth-order multipoint iteration scheme:
Geum et al. [
17] presented a non-optimal class of two-point sixth-order as follows:
where
,
and
is a holomorphic function in the neighborhood of origin
. However, the main drawback of this algorithm is that it is not valid for simple zeros (i.e., for
).
In 2016, Geum et al. [
18] developed another non-optimal family of three-point sixth-order techniques for multiple zeros consisting of the steps:
where
and
. The weight functions
and
are analytic in the neighborhood of zero and
, respectively. It can be seen that (
3) and (
4) require four function evaluations to achieve sixth-order convergence. Therefore, they are not optimal in the sense of the Kung and Traub conjecture [
1]. It is needless to mention that several authors have tried to develop optimal eighth-order techniques for multiple zeros, but without success to the authors’ best knowledge. Motivated by this fact, Behl et al. [
19] introduced an optimal eighth-order iterative family for multiple roots given by:
where
is analytic in the neighborhood of
and
is holomorphic in the neighborhood of
, with
,
, and
. Moreover,
and
and free disposable real parameters.
Zafar et al. [
20] presented an optimal eighth-order family using the weight function approach as follows:
where
and
are real parameters and the weight functions
are analytic in the neighborhood of zero, with
,
, and
.
It is clear from the above review of the state-of-the-art that we have a very small number of optimal eighth-order techniques that can handle the case of multiple zeros. Moreover, these types of methods have not been discussed in depth to date. Therefore, the main motivation of the current research work is to present a new optimal class of iterative functions having eighth-order convergence, exploiting the weight function technique for computing multiple zeros. The new scheme requires only four function evaluations
per iteration, which is in accordance with the classical Kung–Traub conjecture. It is also interesting to note that the optimal eighth-order family (
5) proposed by Behl et al. [
19] can be considered as a special case of (
7) for some particular values of the free parameters. In fact, the Artidiello et al. [
21] family can be obtained as a special case of (
7) in the case of simple roots. Therefore, the new algorithm can be treated as a more general family for approximating multiple zeros of nonlinear functions.
The rest of the paper is organized as follows.
Section 2 presents the new eighth-order scheme and its convergence analysis.
Section 2.1 discuss some special cases based on the different choices of weight functions employed in the second and third substeps of (
7).
Section 3 is devoted to the numerical experiments and the analysis of the dynamical behavior, which illustrate the efficiency, accuracy, and stability of (
7).
Section 4 presents the conclusions.
3. Numerical Experiments
In this section, we analyze the computational aspects of the following cases: Equation (
32) for
(
), Family (
33) for
(
), and Equation (
35) for
(
). Additionally, we compare the results with those of other techniques.
In this regard, we considered several test functions coming from real-life problems and linear algebra that represent Examples 1–7 in the follow-up. We compared them with the optimal eighth-order scheme (
5) given by Behl et al. [
19] for
and
and the approach (
6) of Zafar et al. [
20] taking
,
, and
for
denoted by
and
, respectively. Furthermore, we compared them with the family of two-point sixth-order methods proposed by Geum et al. in [
17], choosing out of them Case 2A, given by:
where
,
,
, and
.
Finally, we compared them with the non-optimal family of sixth-order methods based on the weight function approach presented by Geum et al. [
18]; out of them, we considered Case 5YD, which is defined as follows:
We denote Equations (
36) and (
37) by
and
, respectively.
The numerical results listed in
Table 1,
Table 2,
Table 3,
Table 4,
Table 5,
Table 6 and
Table 7, compare our techniques with the four ones described previously.
Table 1,
Table 2,
Table 3,
Table 4,
Table 5,
Table 6 and
Table 7, include the number of iteration indices
n, approximated zeros
, absolute residual error of the corresponding function
, error in the consecutive iterations
, the computational order of convergence
(the details of this formula can be seen in [
22]), the ratio of two consecutive iterations based on the order of convergence
(where
p is either six or eight, corresponding to the chosen iterative method), and the estimation of asymptotic error constant
at the last iteration. We considered 4096 significant digits of minimum precision to minimize the round off error.
We calculated the values of all the constants and functional residuals up to several significant digits, but we display the value of the approximated zero
up to 25 significant digits (although a minimum of 4096 significant digits were available). The absolute residual error in the function
and the error in two consecutive iterations
are displayed up to two significant digits with exponent power. The computational order of convergence is reported with five significant digits, while
and
are displayed up to 10 significant digits. From
Table 1,
Table 2,
Table 3,
Table 4,
Table 5,
Table 6 and
Table 7, it can be observed that a smaller asymptotic error constant implies that the corresponding method converged faster than the other ones. Nonetheless, it may happen in some cases that the method not only had smaller residual errors and smaller error differences between two consecutive iterations, but also larger asymptotic error.
All computations in the numerical experiments were carried out with the programming package using multiple precision arithmetic. Furthermore, the notation means .
We observed that all methods converged only if the initial guess was chosen sufficiently close to the desired root. Therefore, going a step further, we decided to investigate the dynamical behavior of the test functions
in the complex plane. In other words, we numerically approximated the domain of attraction of the zeros as a qualitative measure of how the methods depend on the choice of the initial approximation of the root. To answer this important question on the behavior of the algorithms, we discussed the complex dynamics of the iterative maps (
32), (
33), and (
35) and compared them with the schemes (
36), (
37), (
5), and (
6), respectively.
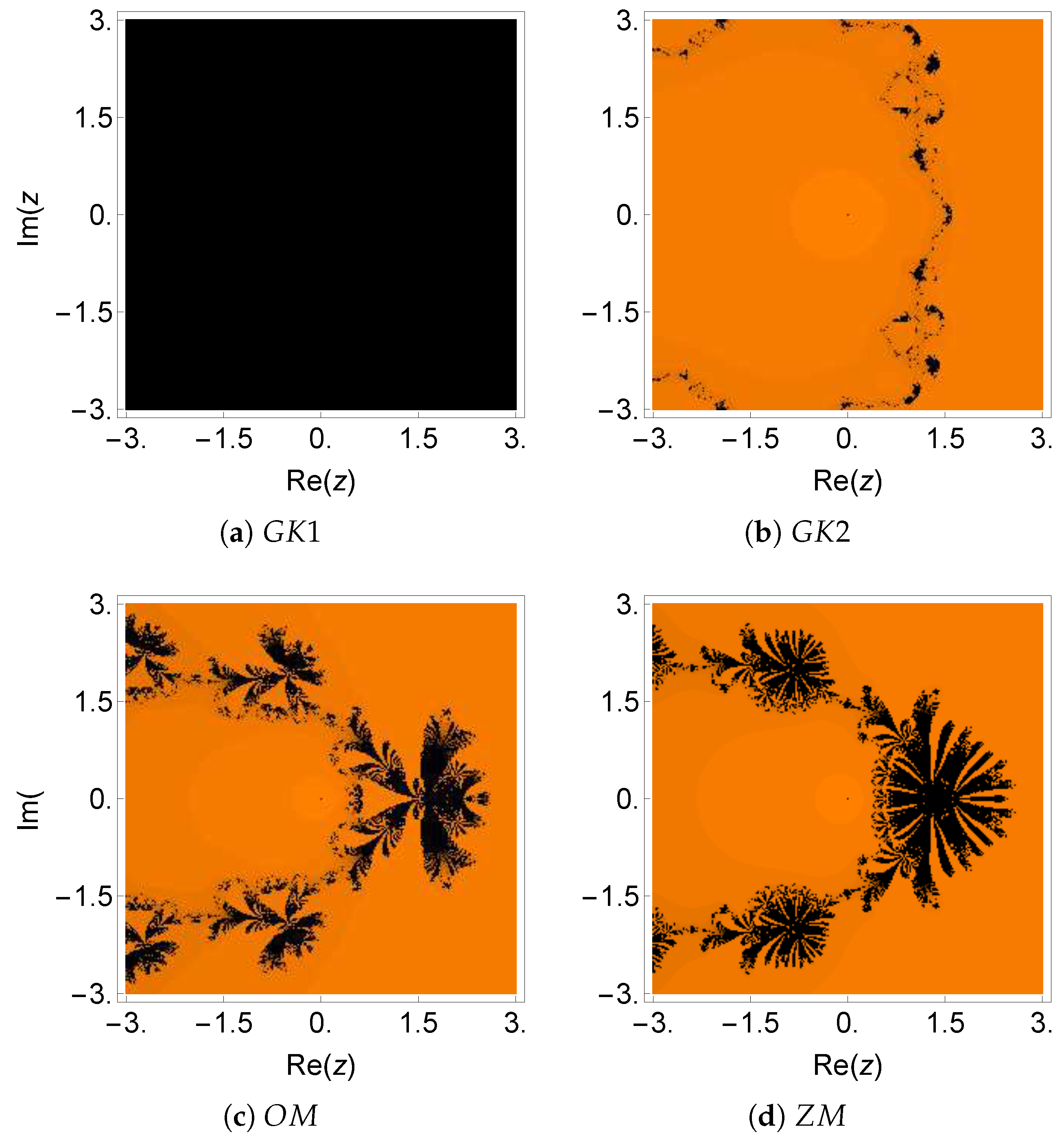
From the dynamical and graphical point of view [
23,
24], we took a
grid of the square
and assigned orange color to those points whose orbits converged to the multiple root. We represent a given point as black if the orbit converges to strange fixed points or diverges after at most 25 iterations using a tolerance of
. Note that the black color denotes lack of convergence of the algorithm to any of the roots. This happened, in particular, when the method converged to a strange fixed point (fixed points that were not roots of the nonlinear function), ended in a periodic cycle, or went to infinity.
Table 8 depicts the measures of convergence of different iterative methods in terms of the average number of iterations per point. The column
shows the average number of iterations per point until the algorithm decided that a root had been reached, otherwise it indicates that the point was non-convergent. The column
shows the percentage of non-convergent points, indicated as black zones in the fractal pictures represented in
Figure 1,
Figure 2,
Figure 3,
Figure 4,
Figure 5,
Figure 6,
Figure 7,
Figure 8,
Figure 9,
Figure 10,
Figure 11,
Figure 12,
Figure 13 and
Figure 14. It is clear that the non-convergent points had a considerable influence on the values of
since these points contributed always with the maximum number of 25 allowed iterations. In contrast, convergent points were reached usually very quickly because we were working with multipoint iterative methods of higher order. Therefore, to minimize the effect of non-convergent points, we included the column
, which shows the average number of iterations per convergent point.
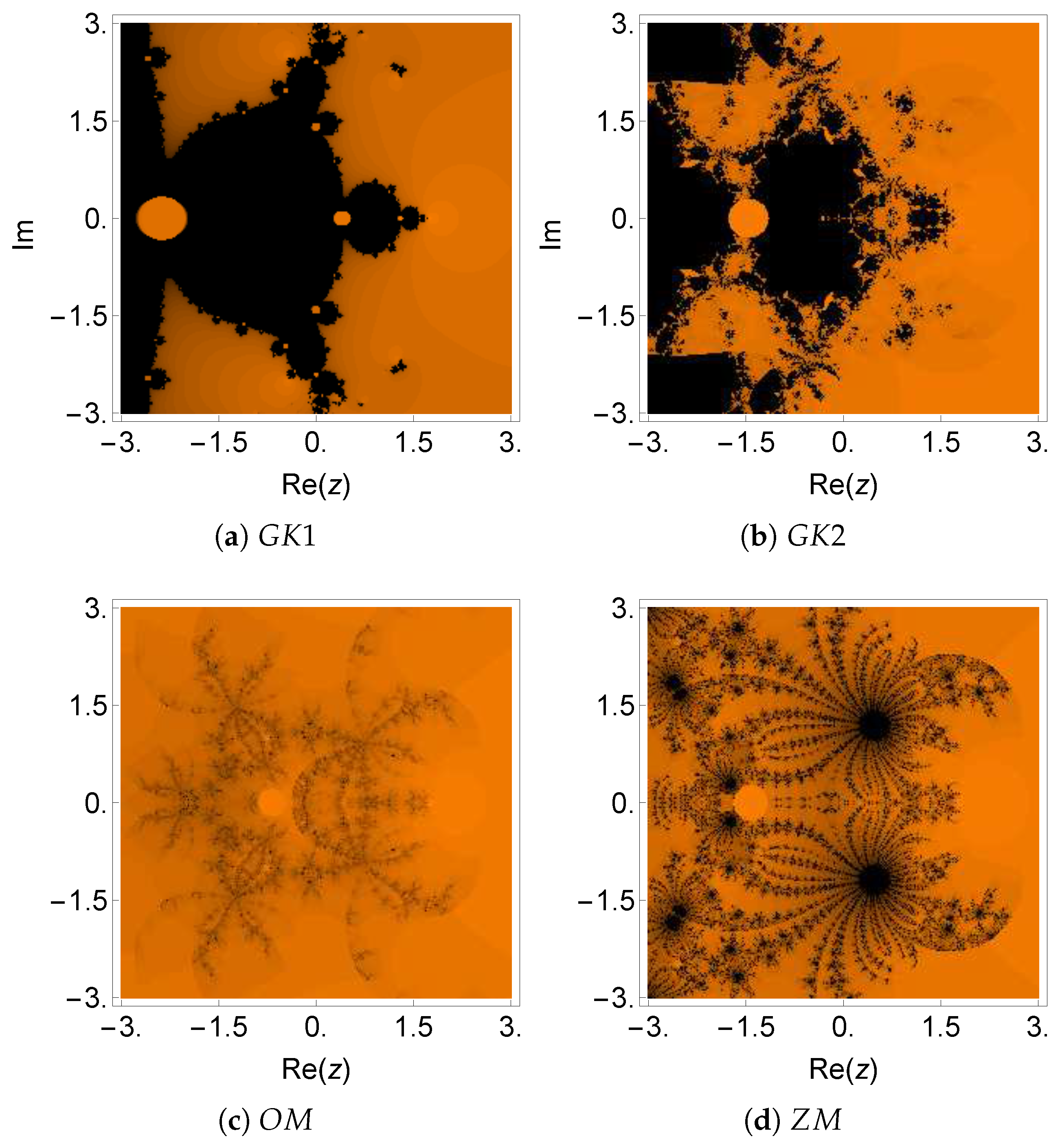
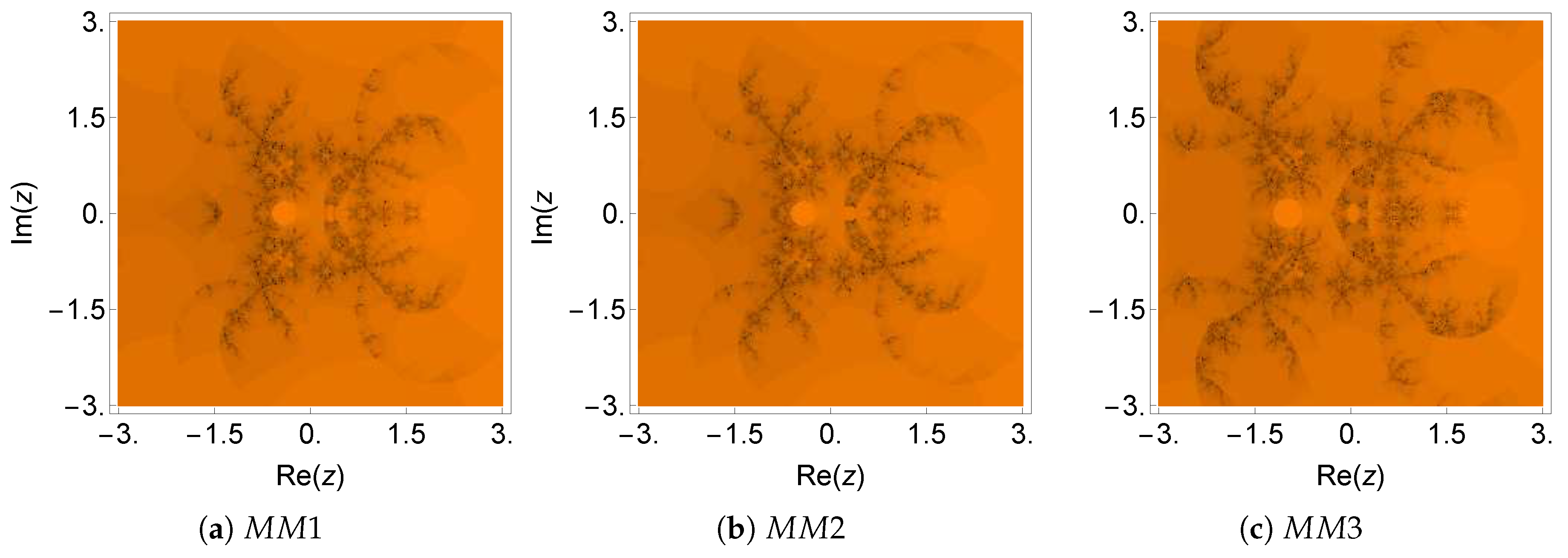
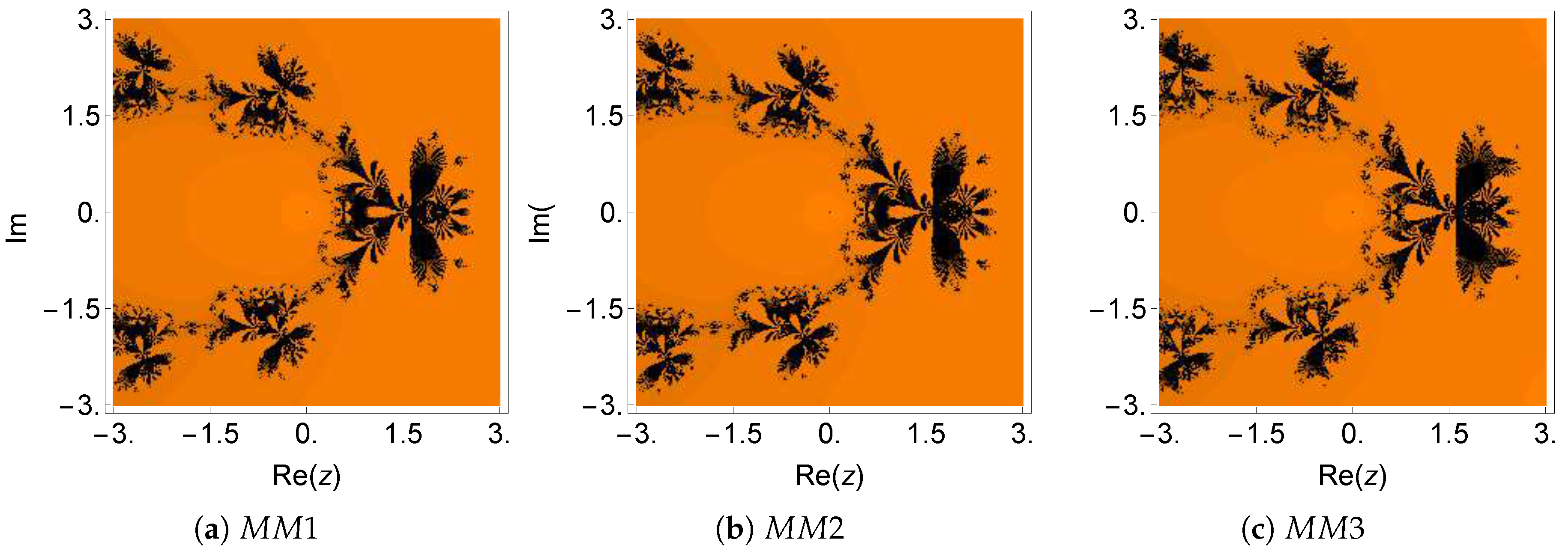
Example 1. We considered the van der Waals equation of state [25]:where a and b explain the behavior of a real gas by introducing in the ideal equations two parameters, a and b (known as van der Waals constants), specific for each case. The determination of the volume V of the gas in terms of the remaining parameters required the solution of a nonlinear equation in V: Given the constants a and b that characterize a particular gas, one can find values for n, P, and T, such that this equation has three roots. By using the particular values, we obtained the following nonlinear function (see [26] for more details)having three zeros, so that one is , of multiplicity of two, and the other . However, our desired root was . The numerical results shown in
Table 1 reveal that the new methods
,
, and
had better performance than the others in terms of precision in the calculation of the multiple roots of
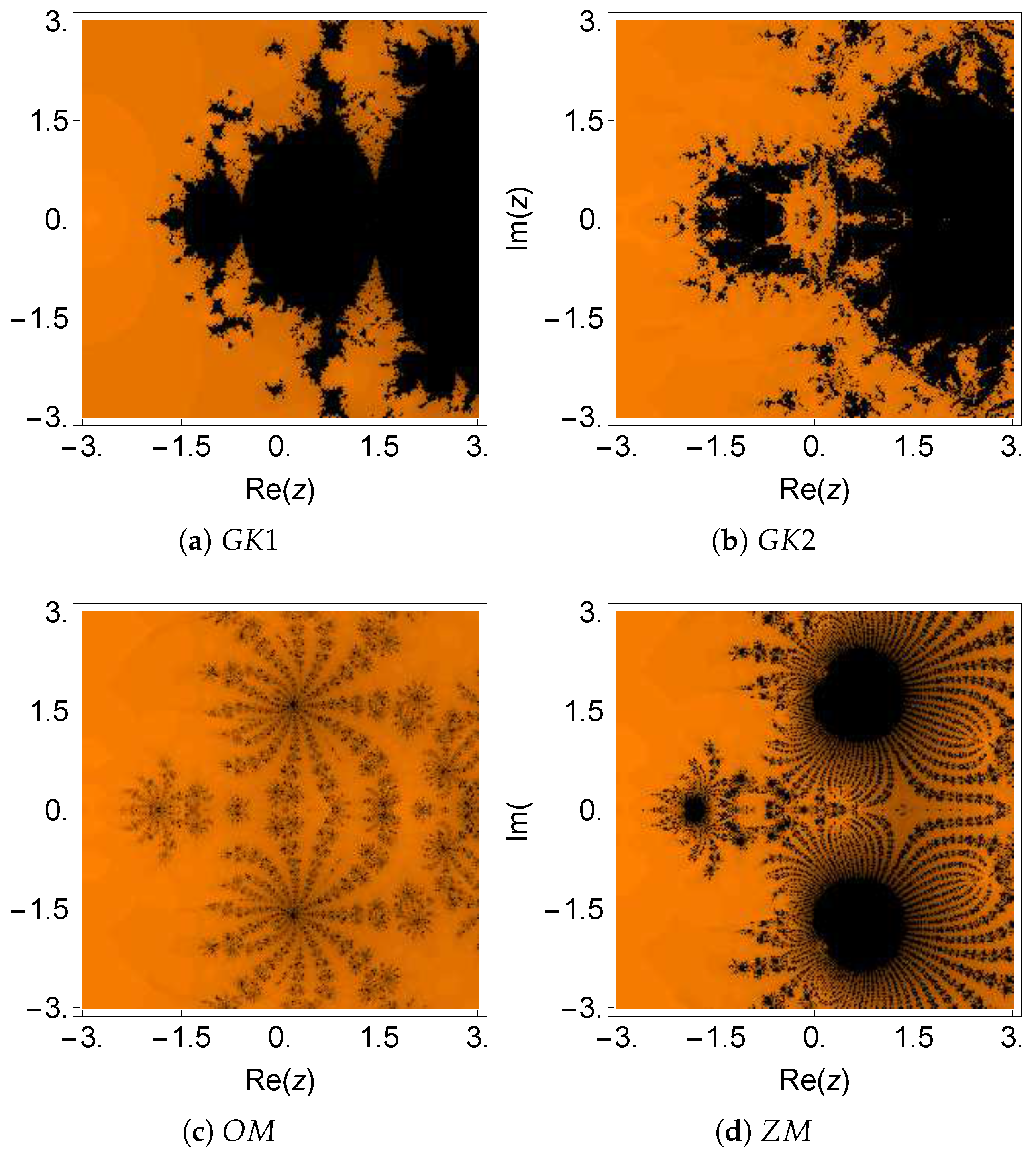
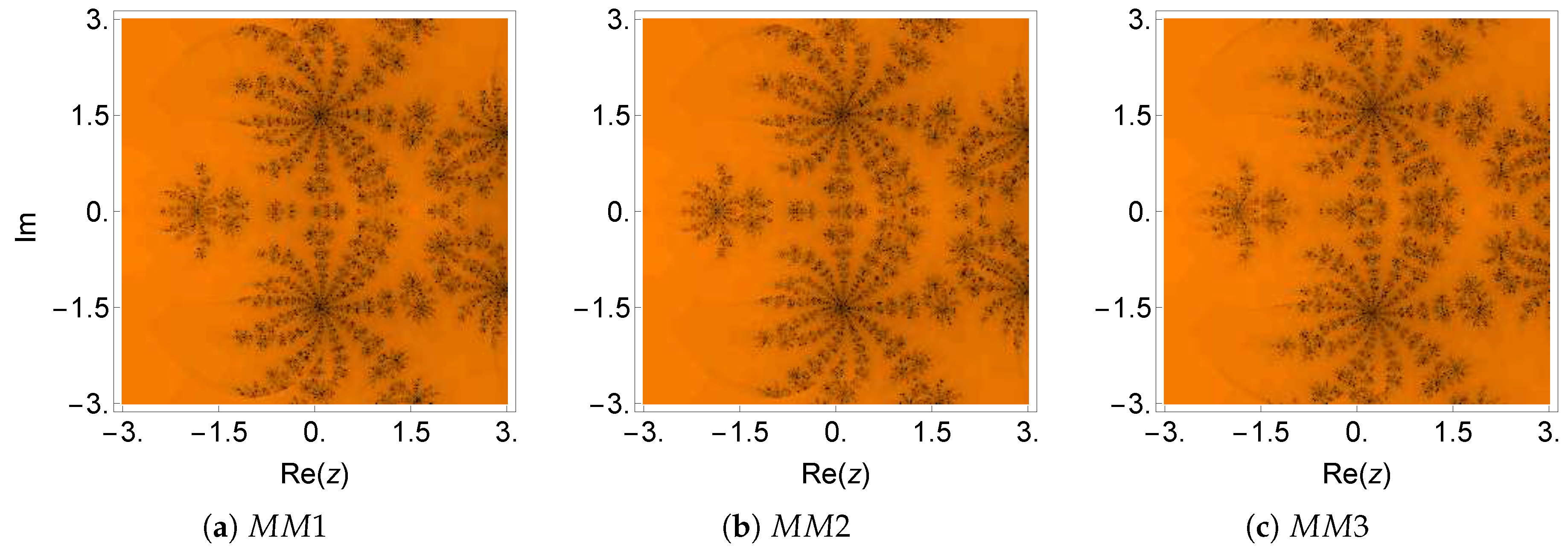
. On the other hand, the dynamical planes of different iterative methods for this problem are given in
Figure 1 and
Figure 2. One can see that the new methods had a larger stable (area marked in orange) than the methods
,
,
, and
. It can also be verified from
Table 8 that the three new methods required a smaller average number of iterations per point (
) and a smaller percentage of non-convergent points (
). Furthermore, we found that
used the smallest number of iterations per point (
5.95 on average), while
required the highest number of iterations per point (
14.82).
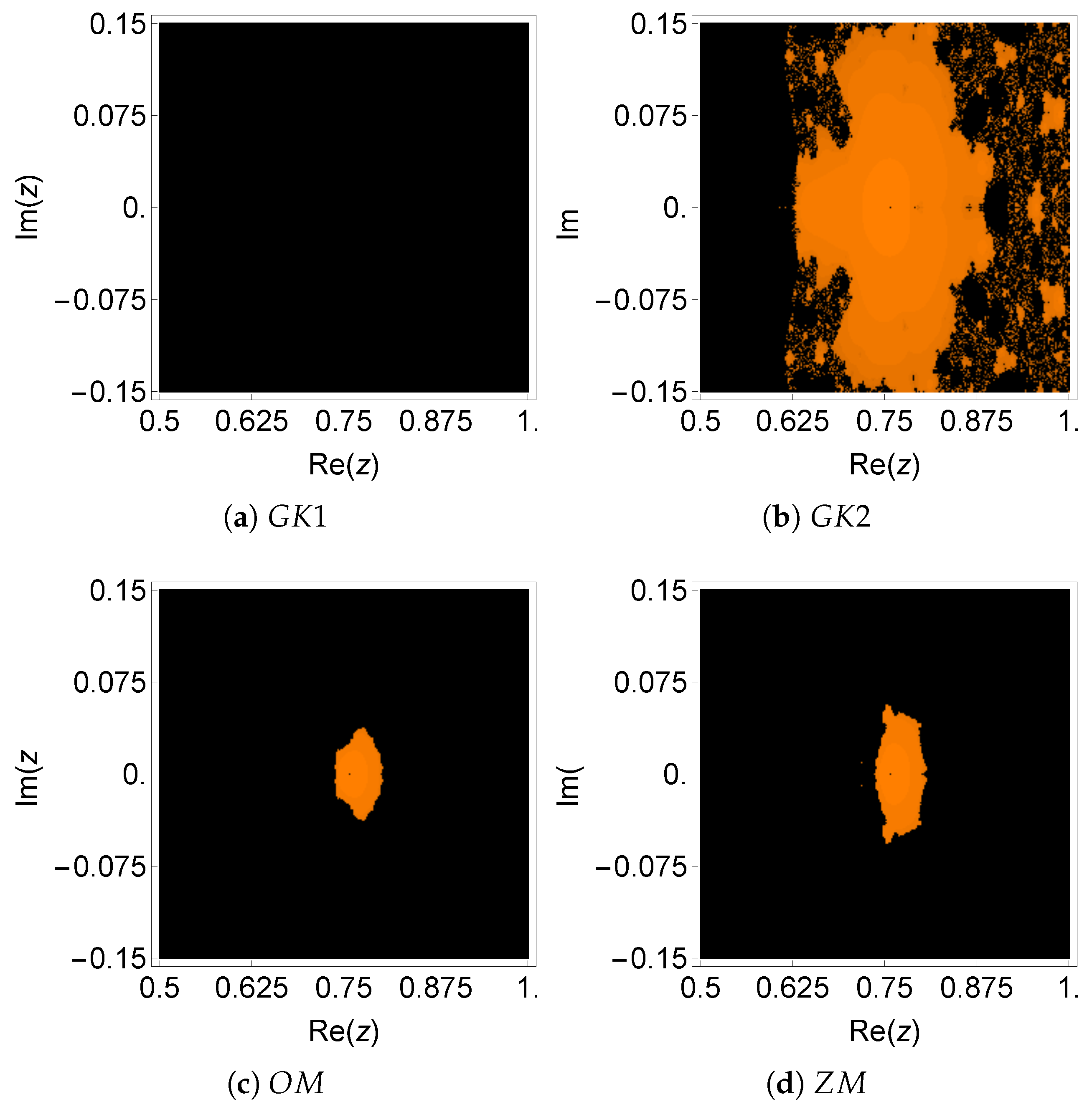
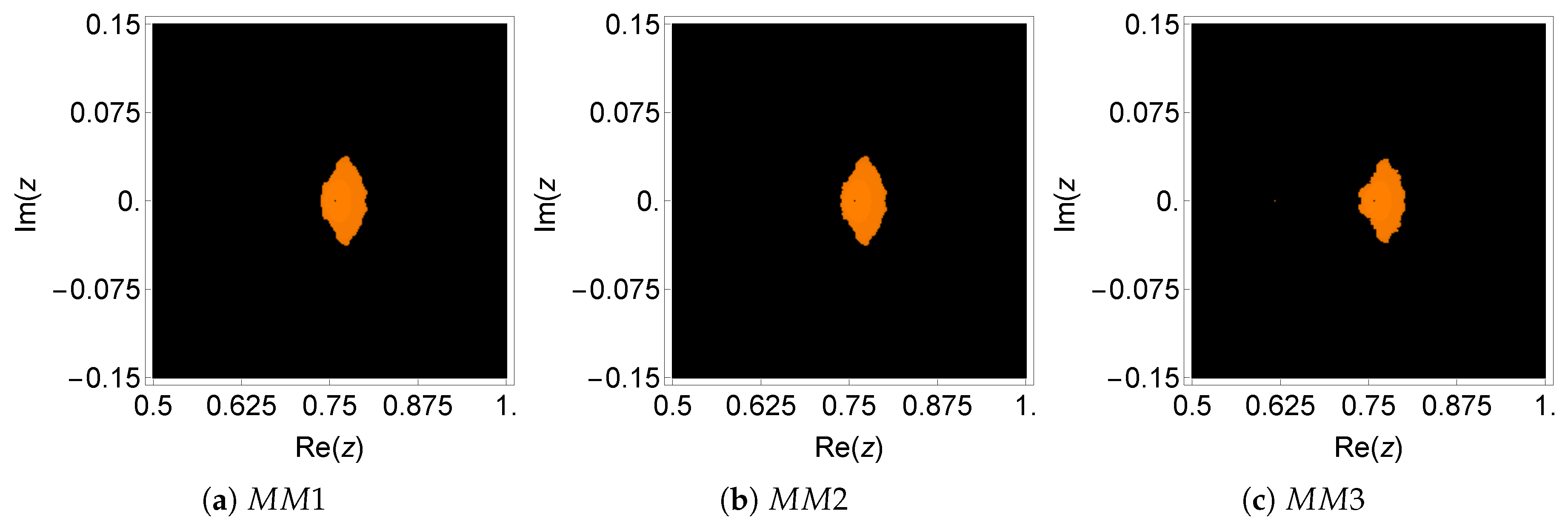
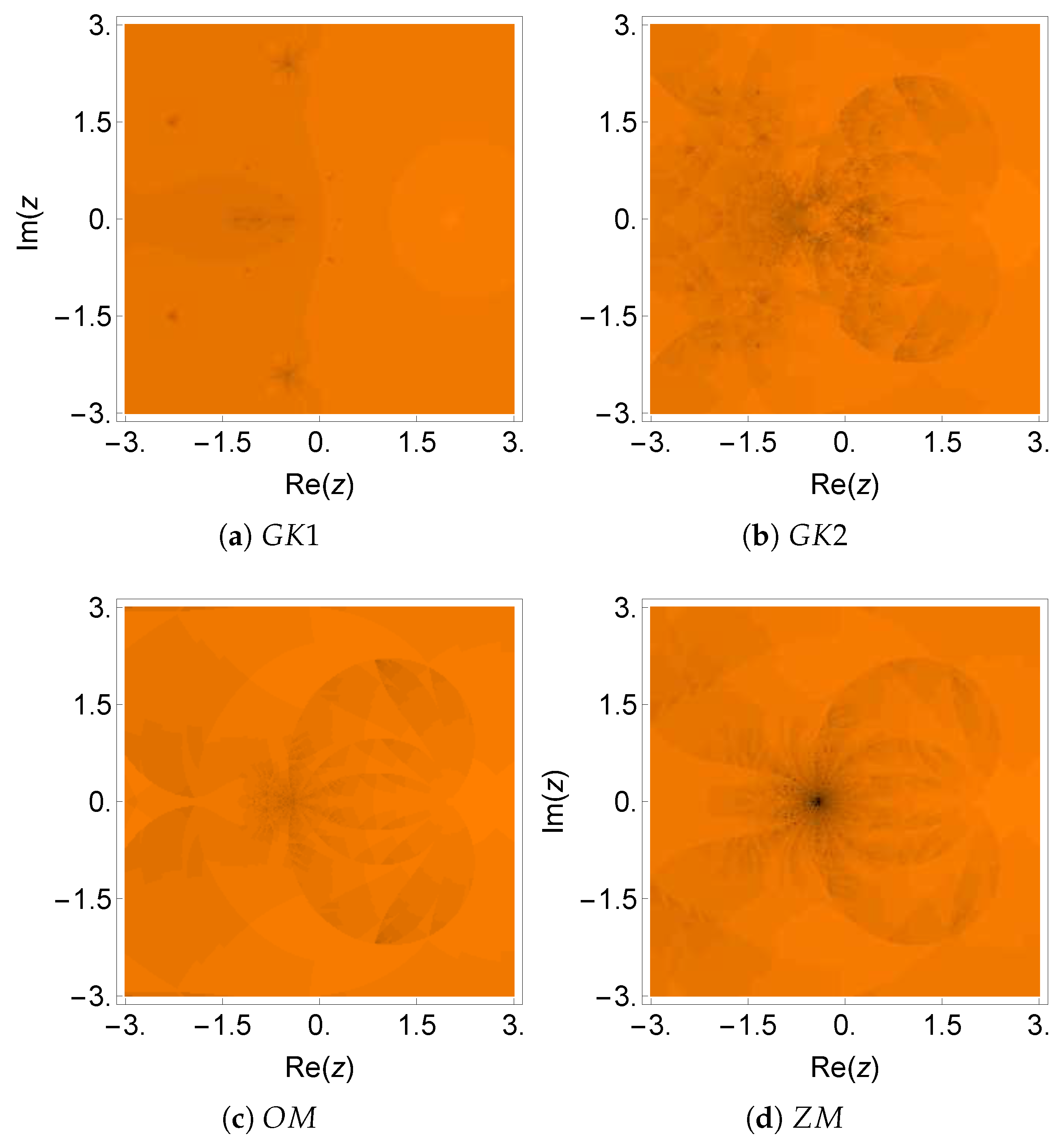
Example 2. Fractional conversion in a chemical reactor:
Let us consider the following equation (see [27,28] for more details): In the above equation, x represents the fractional conversion of Species A in a chemical reactor. There is no physical meaning of Equation (38) if x is less than zero or greater than one, since x is bounded in the region . The required zero (that is simple) to this problem is . Nonetheless, the above equation is undefined in the region , which is very close to the desired zero. Furthermore, there are some other properties of this function that make the solution more difficult to obtain. In fact, the derivative of the above equation is very close to zero in the region , and there is an infeasible solution for . From
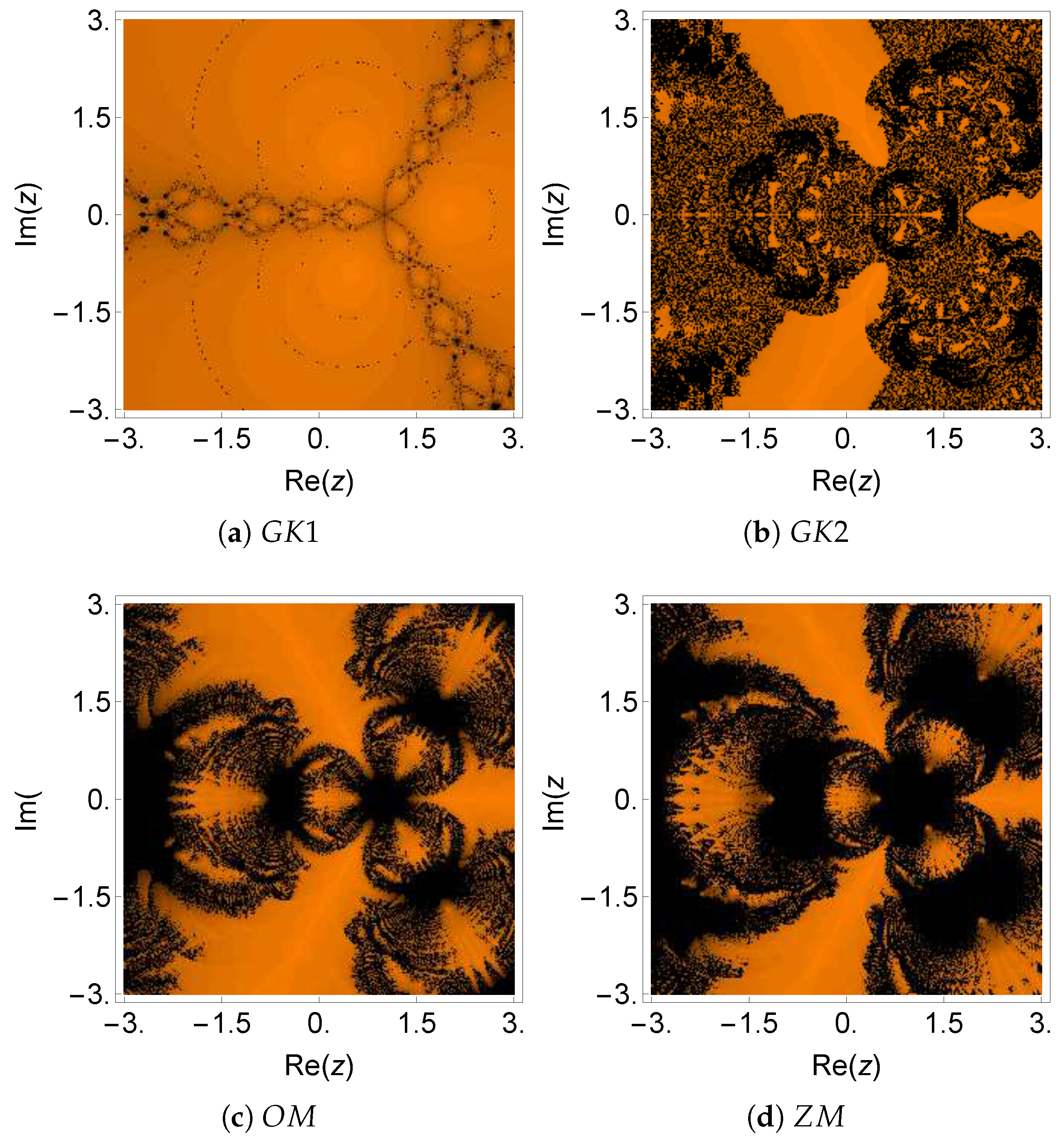
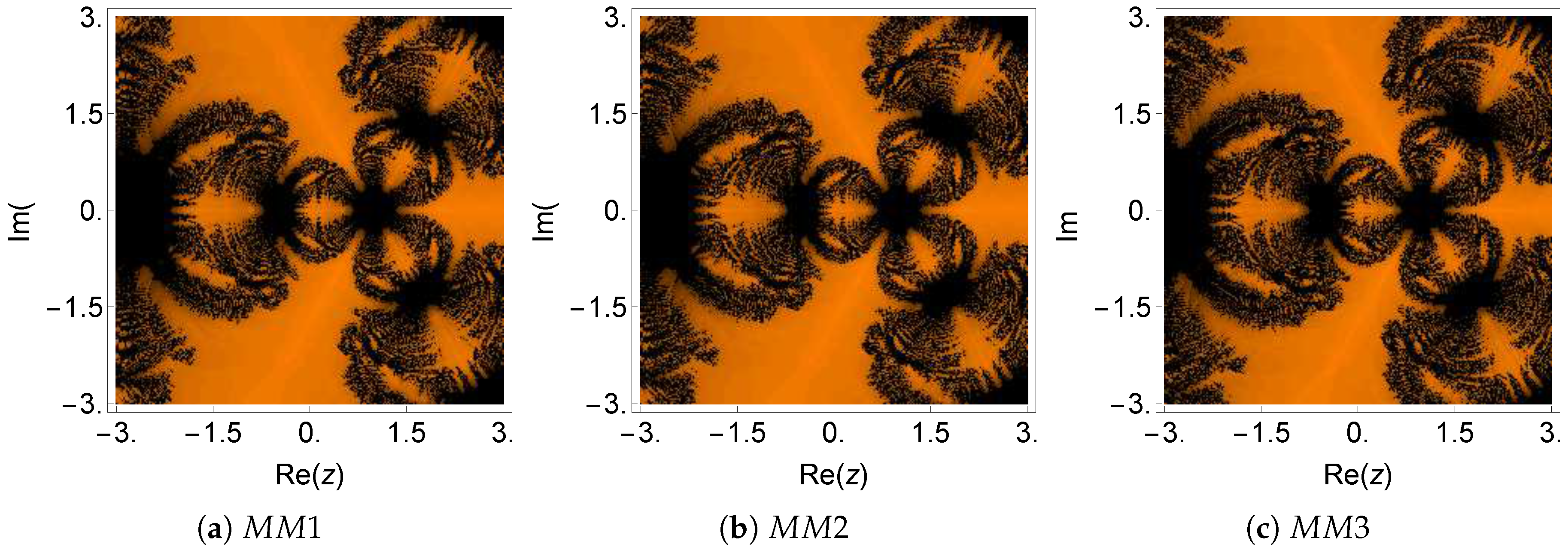
Figure 3 and
Figure 4, we verified that the basin of attraction of the searched root (orange color) was very small, or does not exist in most of the methods. The number of non-convergent points that corresponds to the black area was very large for all the considered methods (see
Table 8). Moreover, an almost symmetric orange-colored area appeared in some cases, which corresponds to the solution without physical sense, that is an attracting fixed point. Except for
(not applicable for simple roots), all other methods converged to the multiple roost only if the initial guess was chosen sufficiently close to the required root, although the basins of attraction were quite small in all cases. The numerical results presented in
Table 2 are compatible with the dynamical results in
Figure 3 and
Figure 4. We can see that the new methods revealed smaller residual error and a smaller difference between the consecutive approximations in comparison to the existing ones. Moreover, the numerical estimation of the order of convergence coincided with the theoretical one in all cases. In
Table 2, the symbol * means that the corresponding method does not converge to the desired root.
Example 3. Continuous stirred tank reactor (CSTR) [20,29]: In this third example, we considered the isothermal continuous stirred tank reactor (CSTR) problem. The following reaction scheme develops in the reactor (see [30] for more details):where components A and R are fed to the reactor at rates of Q and , respectively. The problem was analyzed in detail by Douglas [31] in order to design simple feedback control systems. In the modeling study, the following equation for the transfer function of the reactor was given:where is the gain of the proportional controller. The control system is stable for values of , which yields roots of the transfer function having a negative real part. If we choose , then we get the poles of the open-loop transfer function as roots of the nonlinear equation:such as , , , . Therefore, we see that there is one root with multiplicity two. The numerical results for this example are listed in
Table 3. The dynamical planes for this example are plotted in
Figure 5 and
Figure 6. For methods
,
, and
, the black region of divergence was very large, which means that the methods would not converge if the initial point was located inside this region. This effect can also be observed from
Table 8, where the average number of iterations per point and percentage of non-convergent points are high for methods
(
13.71 on average),
(
12.18 on average), and
(
12.50 on average), while the new methods have a comparatively smaller number of iterations per point. The results of method
closely follow the new methods with an average number of 7.29 iterations per point.
Example 4. Let us consider another nonlinear test function from [2], as follows: The above function has a multiple zero at of multiplicity 50.
Table 4 shows the numerical results for this example. It can be observed that the results were very good for all the cases, the residuals being lower for the newly-proposed methods. Moreover, the asymptotic error constant (
) displayed in the last column of
Table 4 was large for the methods
and
in comparison to the other schemes. Based on the dynamical planes in
Figure 7 and
Figure 8, it is observed that in all schemes, except
, the black region of divergence was very large. This is also justified from the observations of
Table 8. We verified that
required the highest average number of iterations per point (
17.74), while
required the smallest number of iterations per point (
6.78). All other methods required an average number of iterations per point in the range of 15.64–16.67. Furthermore, we observed that the percentage of non-convergent points
was very high for
(
) followed by
(
). Furthermore, it can also be seen that the average number of iterations per convergent point (
) for the methods
,
,
, and
was 6.55, 8.47, 9.58, and 8.52, respectively. On the other hand, the proposed methods
,
, and
required 9.63, 9.67, and 10.13, respectively.
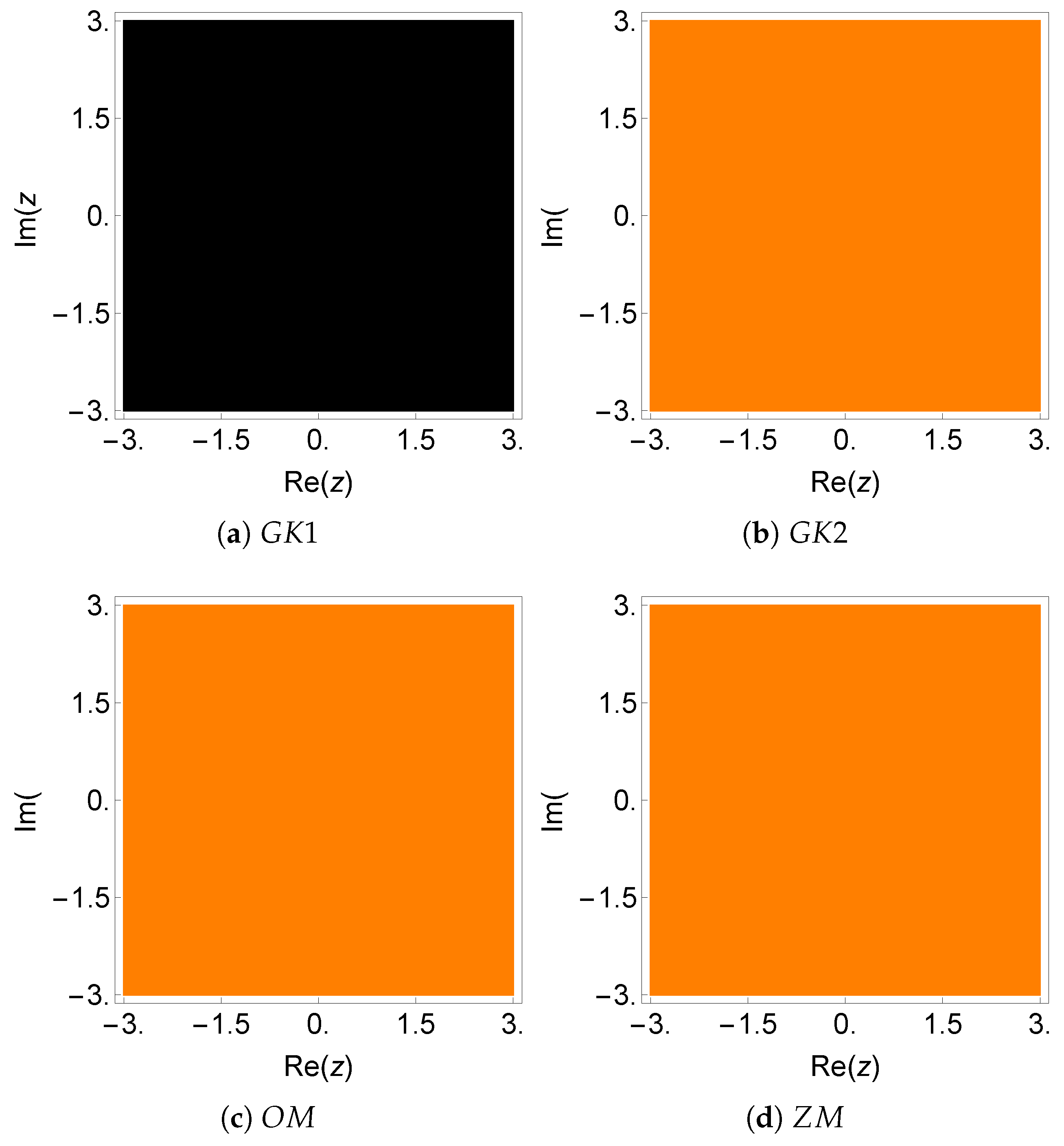
Example 5. Planck’s radiation law problem [32]: We considered the following Planck’s radiation law problem that calculates the energy density within an isothermal blackbody and is given by [33]:where λ represents the wavelength of the radiation, T stands for the absolute temperature of the blackbody, B is the Boltzmann constant, h denotes Planck’s constant, and c is the speed of light. We were interested in determining the wavelength λ that corresponds to the maximum energy density . The condition implies that the maximum value of Ψ occurs when: If , then (43) is satisfied when: Therefore, the solutions of give the maximum wavelength of radiation λ by means of the following formula:where α is a solution of (44). The desired root is with multiplicity . The numerical results for the test equation
are displayed in
Table 5. It can be observed that
and
had small values of residual errors and asymptotic error constants (
), in comparison to the other methods, when the accuracy was tested in multi-precision arithmetic. Furthermore, the basins of attraction for all the methods are represented in
Figure 9 and
Figure 10. One can see that the fractal plot of the method
was completely black because the multiplicity of the desired root was unity in this case. On the other hand, method
had the most reduced black area in
Figure 9b, which is further justified in
Table 8. The method
had a minimum average number of iterations per point (
2.54) and the smallest percentage of non-convergent points (
), while
had the highest percentage of non-convergent points (
). For the other methods, the average number of iterations per point was in the range from 4.55–5.22 and the percentage of non-convergent points lies between 12.32 and 12.62.
Example 6. Consider the following matrix [29]: The corresponding characteristic polynomial of this matrix is as follows: The characteristic equation has one root at of multiplicity four.
Table 6 shows the numerical results for this example. It can be observed in
Figure 11 and
Figure 12 that the orange areas dominate the plot. In fact, they correspond to the basin of attraction of the searched zero. This means that the method converges if the initial estimation was located inside this orange region. All schemes had a negligible black portion, as can be observed in
Figure 11 and
Figure 12. Moreover, the numerical tests for this nonlinear function showed that
,
, and
had the best results in terms of accuracy and estimation of the order of convergence. Consulting
Table 8, we note that the average number of iterations per point (
) was almost identical for all methods (ranging from 3.25–3.52).
Example 7. Global CO model by McHugh et al. [34] in ocean chemistry: In this example, we discuss the global CO model by McHugh et al. [34] in ocean chemistry (please see [35] for more details). This problem leads to the numerical solution of a nonlinear fourth-order polynomial in the calculation of of the ocean. The effect of atmospheric CO is very complex and varies with the location. Therefore, Babajee [35] considered a simplified approach based on the following assumptions: - 1.
Only the ocean upper layer is considered (not the deep layer),
- 2.
Neglecting the spatial variations, an approximation of the ocean upper layer carbon distribution by perfect mixing is considered.
As the CO dissolves in ocean water, it undergoes a series of chemical changes that ultimately lead to increased hydrogen ion concentration, denoted as , and thus acidification. The problem was analyzed by Babajee [35] in order to find the solution of the following nonlinear function:so that:where , and are equilibrium constants. The parameter A represents the alkalinity, which expresses the neutrality of the ocean water, and is the gas phase CO partial pressure. We assume the values of and taken by Sarmiento and Gruyber [36] and Bacastow and Keeling [37], respectively. Furthermore, choosing the values of , and given by Babajee [35], we obtain the following nonlinear equation: The roots of are given by . Hereafter, we pursue the root having multiplicity .
The numerical experiments of this example are given in
Table 7. The methods
,
, and
had small residual errors and asymptotic error constants when compared to the other schemes. The computational order of convergence for all methods coincided with the theoretical ones in seven cases.
Figure 13 and
Figure 14 show the dynamical planes of all the methods on test function
. It can be observed that all methods showed stable behavior, except
, as can also be confirmed in
Table 8.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}