Abstract
In this work, we study the completely integrable sixth-order nonlinear Ramani equation. By applying the Lie symmetry analysis technique, the Lie point symmetries and the optimal system of one-dimensional sub-algebras of the equation are derived. The optimal system is further used to derive the symmetry reductions and exact solutions. In conjunction with the Riccati Bernoulli sub-ODE (RBSO), we construct the travelling wave solutions of the equation by solving the ordinary differential equations (ODEs) obtained from the symmetry reduction. We show that the equation is nonlinearly self-adjoint and construct the conservation laws (CL) associated with the Lie symmetries by invoking the conservation theorem due to Ibragimov. Some figures are shown to show the physical interpretations of the acquired results.
1. Introduction
It is well-known that the majority of real-world physical phenomena are modeled by mathematical equations, especially partial differential equations (PDEs). These phenomena include the problems from fluid mechanics, elasticity, plasma physics and optical fibers, general relativity, gas dynamics, thermodynamics, and so on []. In order to understand the understanding of such physical phenomena, it is vital to look for the exact solutions of the PDEs. In the last few decades, many scientists and mathematicians have extensively studied the dynamic behaviors of several PDEs [,,,,,,,,,,,,,,,,,,,,,,] using different concepts. Symmetry analyses have been used to study the PDEs [,,,,]. It has been found that some new solutions to PDEs can be obtained from the old ones through symmetry transformations []. On the other hand, conservation laws (CLs) are very important in the study of PDEs. CLs are important in determining the integrability of PDEs [].
As an important integrable nonlinear model, the integrable sixth-order nonlinear Ramani equation [,,,,,,]
has attracted much attention in soliton theory in recent years. The equation was first proposed in reference []. The equation was obtained as a five-reduction of the bilinear Kadomtsev–Petviashvili (BKP) equation []. It has been shown that the Ramani equation possesses bilinear Bäcklund transformation and CL []. In reference [], the truncated singular expansion scheme was applied to construct the Bäcklund self-transformation and Lax pairs for Equation (1). In reference [], the Lax pairs and Bäcklund transformation were applied to study the equation. An extension of Equation (1), called the coupled Ramani equation, was extensively studied in references [,,,].
To our knowledge, a Lie symmetry analysis of Equation (1) has not been completed. The main aim of this work is to derive the Lie point symmetries [,], the optimal system of one-dimensional sub-algebras, invariant solutions, and the CL of the equation by invoking the conservation theorem due to Ibragimov [,]. The invariant solutions are derived by solving the ordinary differential equations (ODEs) obtained from the symmetry reduction process using the Riccati Bernoulli sub-ODE (RBSO) [].
1.1. Lie Symmetry Analysis of Equation (1)
In this part, we construct the vector fields of Equation (1). The associated vector field of Equation (1) is given by
where the coefficient functions are the infinitesimals. The one-parameter Lie group is represented by
where represents a group parameter. If the vector field in Equation (2) generates a point symmetry of Equation (1), then X should satisfy the invariance condition given by
where is the sixth-order prolongation of [], and
Putting Equation (4) into Equation (3) together with the sixth-order prolongation, we obtain a set of determining equations of linear PDEs. From solving the system of linear PDEs, we obtain the infinitesimals , , and , given by
where , and are constants. The symmetries of Equation (1) are spanned by the vector fields given by
1.2. Optimal System of Algebras
In this part, we derive the optimal system of sub-algebras [] of the vector fields in Equations (5)–(8). To do this, we begin by noting that each yields an adjoint representation , defined by []
where represents the commutator
There is a need to figure out the invariants of the adjoint, because they pose restrictions on the element
A real valued function given by for is invariant
The adjoint representation group is spanned by the Lie algebra , which is spanned by the following expression
where are constants obtained from Table 1. Thus, one can obtain

In addition, we can have
1.3. Similarity Reductions and Exact Solutions
In this part, we use the derived optimal system of Lie algebras in Equation (13) to investigate the solutions of Equation (1). To achieve this, one needs to solve the characteristic equations denoted by
1.3.1. Symmetry Reduction with the Vector Field
For the reduction by the vector field , we acquire the similarity variables with satisfying the ODE:
1.3.2. Symmetry Reduction with the Vector Field
For the reduction by the vector field , we acquire the similarity variables where The function satisfies the following ODE:
1.3.3. Symmetry Reduction with the Vector Field
For the reduction by the vector field , we get the similarity variables where satisfies the following ODE:
1.3.4. Symmetry Reduction with the Vector Field
For the reduction by the vector field , we get the similarity variables where thus satisfies the following ODE:
1.3.5. Invariant Solutions of Equation (15)
Equation (15) is a sixth-order nonlinear ODE. We apply the RBSO technique [] to derive its solutions. In what follows, we provide the description of the RBSO method.
Consider the PDE given by
where .
- Step 1:
- Step 2:
Remark 1.
Equation (18) has the following solutions:
- Case 1:
- If , then we have
- Case 2:
- If , , and , then we have
- Case 3:
- If , and , then we have
- Case 4:
- If , and , then we haveand
- Case 5:
- If , and , then we haveand
- Case 6:
- If , and , then we haveHere, C is a constant.
- Step 3:
- By putting the derivatives of into Equation (17), one can obtain algebraic expressions involving and other parameters. By choosing the value of m according to the steps described above, comparing the coefficients of , performing all the necessary algebraic computations, and utilizing Equations (19)–(26), the solutions of Equation (16) may be derived.
To solve Equation (15) using the RBSO technique, we substitute Equation (18) along with the 2 3 4th and 6th derivatives into Equation (15) and set in the resulting algebraic expression to get
By collecting the terms of in Equation (27) and performing all the necessary algebraic computations, we get
Constants:
:
:
:
:
:
:
:
Family 1: When
we have cases and solutions given by
Case A: If we acquire the kink-type solution given by
and the singular solution
Case B: If we acquire the following periodic traveling wave solutions
and
Case C: From substituting the parameters in Equation (36) into Equation (21), we obtain the following exact solution of Equation (1):
Family 2: When
we acquire the periodic traveling wave solutions represented by
and
2. Conservation Laws
In this part, we derive the nonlinear self-adjointness of Equation (1) for the purpose of constructing the CL. We begin by considering the following theorem from references [,]:
Theorem 1.
The system of differential equations,
with m dependent variables has an adjoint equation
where
The formal Lagrangian Equation (44) for Equation (1) is written as
where is a nonlocal variable. Subsequently, we derive the adjoint of Equation (1) as
Theorem 2.
Equation (42) is nonlinear self-adjoint if it becomes equivalent to its adjoint Equation (43) upon the substitution
such that
Equation (47) means that not all components of of ϕ vanish.
Proof.
Using the Mathematica package called SYM [], we obtain the solution of Equation (50) as
□
Theorem 4.
Any infinitesimal symmetry (Lie point, Bäcklund, nonlocal)
of Equation (42) leads to a CL , constructed by the formula
where and are the conserved vectors.
Equation (1) is nonlinear self-adjoint with the substitution Equation (48). We now use this fact to construct the conserved vectors. As a special case, we choose in Equation (48) to get
We now use each one of the symmetries Equations (9)–(12) and the conservation formula Equation (51) to obtain the following conserved vectors:
- The generator determines the conserved vector:
- The generator determines the conserved vector:
- The generator determines the conserved vector:
- The generator determines the conserved vector:
3. Conclusions
In this paper we obtained travelling wave solutions of the sixth-order nonlinear Ramani equation. The symmetries were used to reduce the equation to ODEs. The RBSO scheme was used to derive the traveling wave solutions of the equation by first solving the ODEs. These traveling wave solutions included kink-type, singular, and exponential function solutions. Furthermore we derived the CL of the equation using the conservation theorem due to Ibragimov. Some interesting figures showing the physical meaning of the obtained results have been shown in Figure 1, Figure 2 and Figure 3.
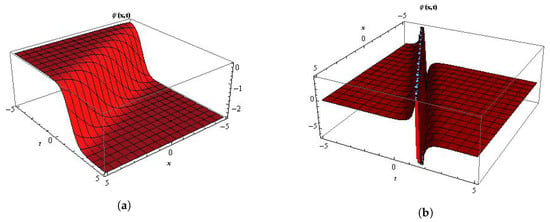
Figure 1.
(a) The 3D surface of the kink-type solution Equation (37) and (b) the singular solution to Equation (38) by setting . These solutions have several physical applications in a Bloch wall between two magnetic domains in a ferromagnetic. The solitary waves propagate without change in the dynamics of the amplitude and width. It can be observed that the solitary waves move along the 3D axis with positive phase velocity and a constant period. The amplitude and phase of the solitary waves do not change during the evolution.
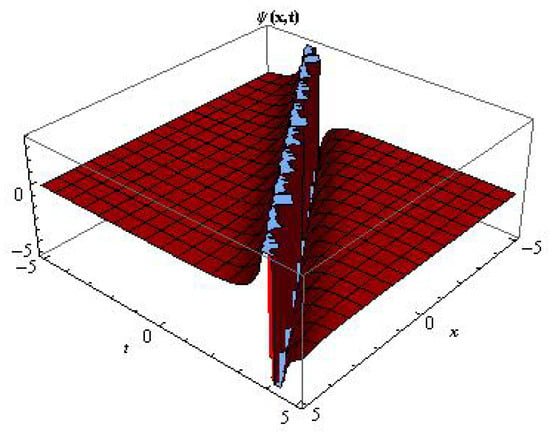
Figure 2.
The 3D surface of the exponential function solution to Equation (39) by setting .
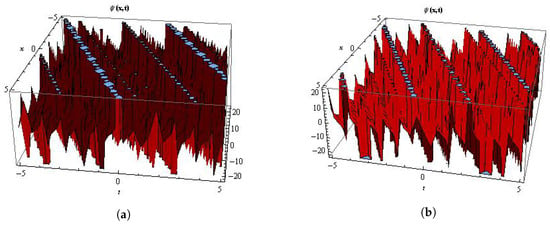
Figure 3.
(a) The 3D surface of the periodic singular solutions to Equation (40) and (b) Equation (41) by setting . These solutions have a low frequency and with several applications in surface waves.These solitary waves also propagate without change in the dynamics of the amplitude, but the width varies due to the periodic oscillation. The phase of the solitary waves change during the evolution process. It can be observed that the periodic solitary waves also move along the 3D axis with phase velocity in a periodic pattern constant period.
Author Contributions
A.I.A., M.I., A.Y. and D.B. worked together in the derivation of the mathematical results. All authors read and approved the final manuscript.
Funding
The authors received no financial support for the research, authorship and/or publication of this article.
Acknowledgments
The authors would like to thank the anonymous reviewers for their valuable comments and suggestions to improve the quality of the paper.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Whitham, G.B. Linear and Nonlinear Waves; Wiley: New York, NY, USA, 1974. [Google Scholar]
- Olver, P.J. Applications of Lie Groups to Differential Equations; Springer: New York, NY, USA, 1993. [Google Scholar]
- Lou, S.Y.; Hu, X.R.; Yong, C. Nonlocal symmetries related to Bäcklund transformation and their applications. J. Phys. A Math. Theor. 2012, 45, 155209. [Google Scholar] [CrossRef]
- Buhe, E.; Bluman, G.W. Symmetry reductions, exact solutions, and conservation laws of the generalized Zakharov equations. J. Math. Phys. 2015, 56, 101501. [Google Scholar] [CrossRef]
- Gao, B. Symmetry analysis and explicit power series solutions of the Boussinesq-Whitham-Broer-Kaup equation. Waves Random Complex Media 2016, 27, 700–710. [Google Scholar] [CrossRef]
- Feng, L.L.; Tian, S.F.; Zhang, T.T.; Zhou, J. Lie symmetries, conservation laws and analytical solutions for two-component integrable equations. Chin. J. Phys. 2017, 55, 996–1010. [Google Scholar] [CrossRef]
- Ibragimov, N.H. Nonlinear self-adjointness and conservation laws. J. Phys. A Math. Theor. 2011, 44, 432002. [Google Scholar] [CrossRef]
- Ibragimov, N.H. A new conservation theorem. J. Math. Anal. Appl. 2007, 333, 311–328. [Google Scholar] [CrossRef]
- Benjamin, T.B.; Olver, P.J. Hamiltonian structure, symmetries and conservation laws for water waves. J. Fluid Mech. 1982, 125, 137–185. [Google Scholar] [CrossRef]
- Ramani, A. Inverse scattering, Ordinary differential equation of Painleve-type and Hirota’s formalism. Ann. Acad. Sci. 1981, 373, 54–67. [Google Scholar] [CrossRef]
- Date, E.; Jimbo, M.; Kashiwara, M.; Miwa, T. Transformation groups for soliton equations. Publ. Res. Inst. Math. Sci. 1982, 18, 1077–1110. [Google Scholar] [CrossRef]
- Hu, X.B. Hirota-type equation, soliton solutions, Bäcklund transformations and conservation laws. J. Partial Differ. Equ. 1990, 3, 87–95. [Google Scholar]
- Karsau, A.; Sarkovich, S.; Turhan, R. A new integrable generalization of the Korteweg-de Vries equation. J. Math. Phys. 2008, 49, 1–10. [Google Scholar]
- Zhao, J.X.; Tam, H.W. Soliton solutions of a coupled Ramani equation. Appl. Math. Lett. 2006, 19, 307–313. [Google Scholar] [CrossRef]
- Wazwaz, A. Multiple soliton solutions for a new coupled Ramani equation. Phys. Scr. 2011, 83, 015002. [Google Scholar] [CrossRef]
- Wazwaz, A. A coupled Ramani equation: multiple soliton solutions. J. Math. Chem. 2012, 52, 2133–2140. [Google Scholar] [CrossRef]
- Wazwaz, A.; Triki, H. Multiple soliton solutions for the sixth-order Ramani equation and a coupled Ramani equation. Appl. Math. Comput. 2010, 216, 332–336. [Google Scholar] [CrossRef]
- Chen, J.; Bao-Feng, F.; Chen, Y. Bilinear Bäcklund transformation, lax pair and multi-soliton solution for a vector Ramani equation. Mod. Phys. Lett. B 2017, 31, 1750133. [Google Scholar] [CrossRef]
- Yang, X.F.; Deng, Z.C.; Wei, Y. A Riccati-Bernoulli sub-ODE method for nonlinear partial differential equations and its application. Adv. Differ. Equ. 2015, 2015, 117. [Google Scholar] [CrossRef]
- Yan, C.; Yan, Z. New exact solutions of (2 + 1)-dimensional Gardner equation via the new sine-Gordon equation expansion method. Phys. Lett. A 1996, 224, 77–84. [Google Scholar] [CrossRef]
- Ma, W.X. A refined invariant subspace method and applications to evolution equations. Sci. China Math. 2012, 55, 1769–1778. [Google Scholar] [CrossRef]
- Ma, W.X.; Liu, Y. Invariant subspaces and exact solutions of a class of dispersive evolution equations. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 3795–3801. [Google Scholar] [CrossRef]
- Inc, M.; Hashemi, M.S.; Aliyu, A.I. Exact solutions and conservation laws of the Bogoyavlenskii equation. Acta Phys. Pol. A 2018, 133, 1133–1137. [Google Scholar] [CrossRef]
- Dimas, S.; Tsoubelis, D. A New Symmetry-Finding Package for Mathematica. In Proceedings of the 10th International Conference in Modern Group Analysis, Larnaca, Cyprus, 24–31 October 2004; University of Cyprus: Nicosia, Cyprus, 2005; pp. 64–70. [Google Scholar]
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).