
A Micromechanical Wide-Range Stiffness-Tuning Mechanism for MEMS Optical Switches



Abstract
1. Introduction
2. Design and Simulation
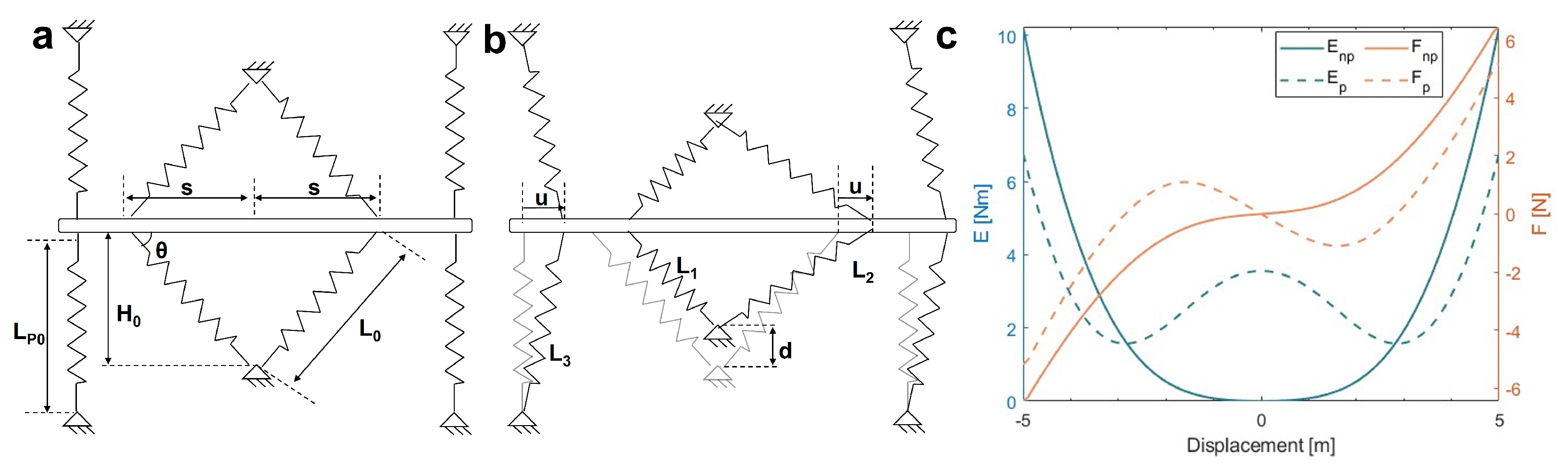
2.1. Stiffness-Adjustment Method
2.2. Simulation
2.3. Other Design Considerations
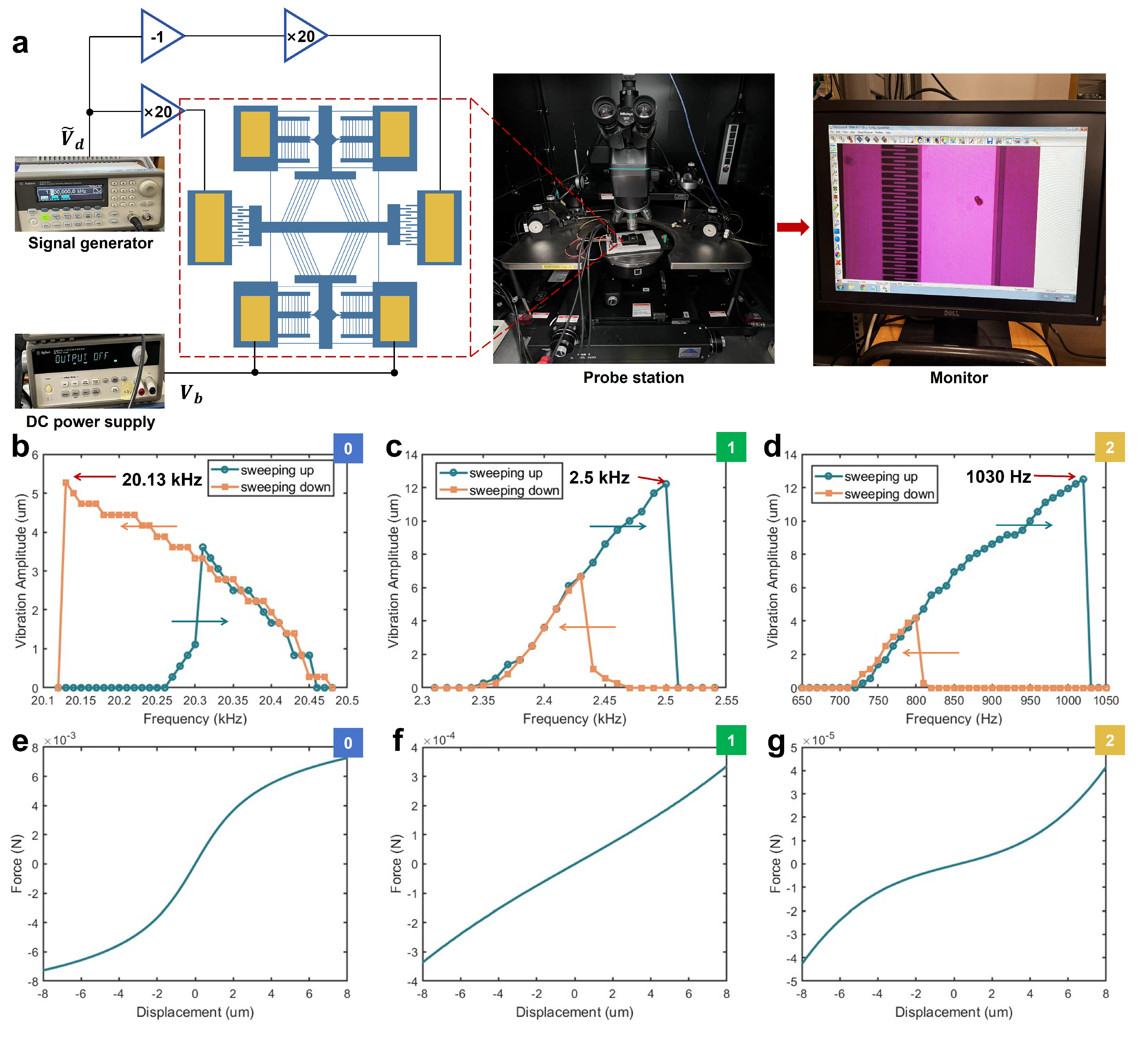
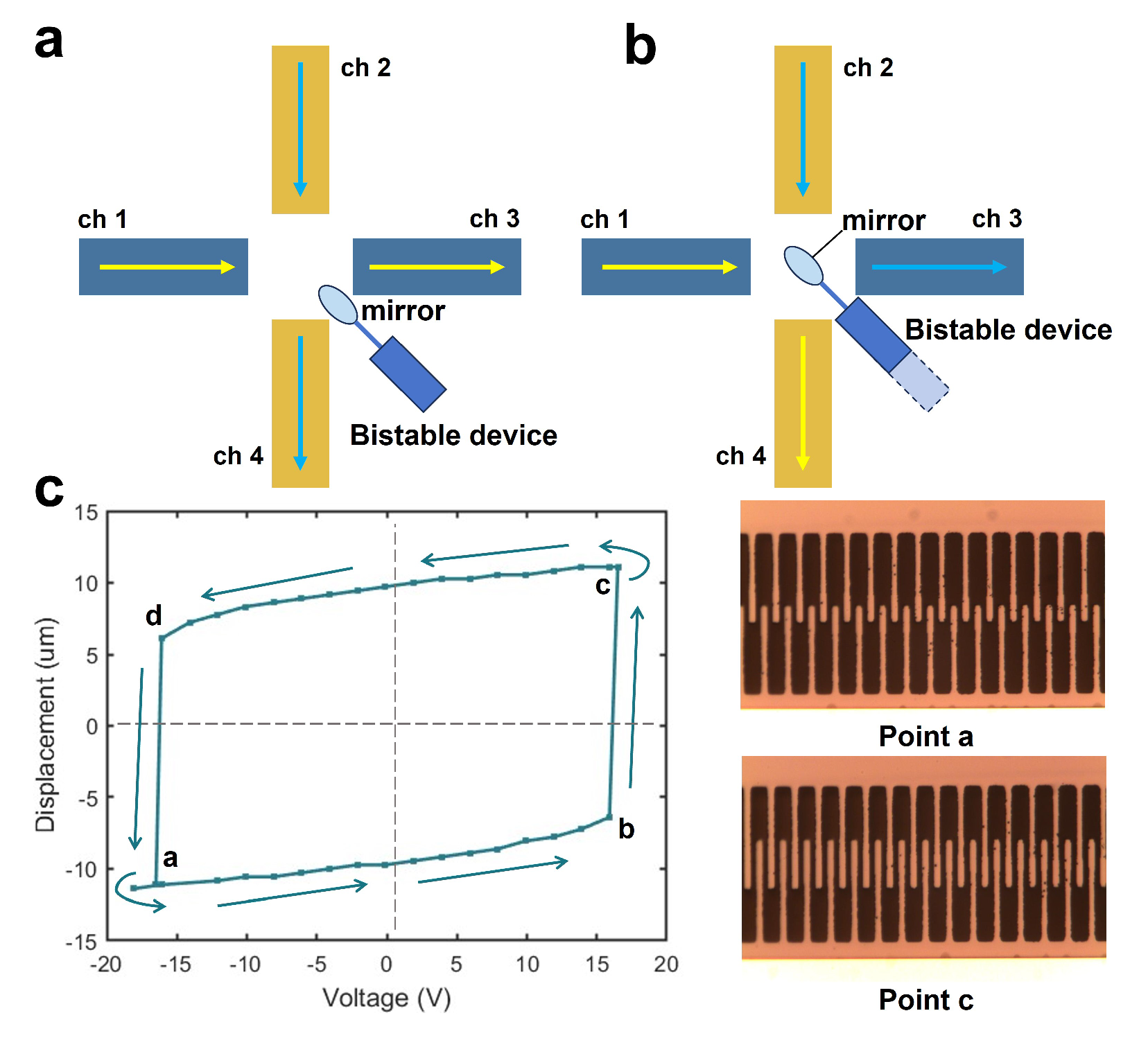
3. Prototype and Experiment
4. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zirbel, S.A.; Tolman, K.A.; Trease, B.P.; Howell, L.L. Bistable mechanisms for space applications. PLoS ONE 2016, 11, e0168218. [Google Scholar] [CrossRef] [PubMed]
- Dou, W.; Zhong, G.; Cao, J.; Shi, Z.; Peng, B.; Jiang, L. Soft robotic manipulators: Designs, actuation, stiffness tuning, and sensing. Adv. Mater. Technol. 2021, 6, 2100018. [Google Scholar] [CrossRef]
- Zhou, Z.; Gao, Y.; Sun, L.; Dong, W.; Du, Z. A bistable mechanism with linear negative stiffness and large in-plane lateral stiffness: Design, modeling and case studies. Mech. Sci. 2020, 11, 75–89. [Google Scholar] [CrossRef]
- Yuan, S.; Sun, Y.; Wang, M.; Ding, J.; Zhao, J.; Huang, Y.; Peng, Y.; Xie, S.; Luo, J.; Pu, H.; et al. Tunable negative stiffness spring using maxwell normal stress. Int. J. Mech. Sci. 2021, 193, 106127. [Google Scholar] [CrossRef]
- Sun, Y.; Zhao, J.; Wang, M.; Sun, Y.; Pu, H.; Luo, J.; Peng, Y.; Xie, S.; Yang, Y. High-static–low-dynamic stiffness isolator with tunable electromagnetic mechanism. IEEE/ASME Trans. Mechatronics 2019, 25, 316–326. [Google Scholar] [CrossRef]
- Chen, S.; Wang, B.; Zhu, S.; Tan, X.; Hu, J.; Lian, X.; Wang, L.; Wu, L. A novel composite negative stiffness structure for recoverable trapping energy. Compos. Part A Appl. Sci. Manuf. 2020, 129, 105697. [Google Scholar] [CrossRef]
- Liao, B.T.; Shen, H.H.; Liao, H.H.; Yang, Y.J. A bi-stable 2x2 optical switch monolithically integrated with variable optical attenuators. Opt. Express 2009, 17, 19919–19925. [Google Scholar] [CrossRef]
- Pluimers, P.J.; Tolou, N.; Jensen, B.D.; Howell, L.L.; Herder, J.L. A compliant on/off connection mechanism for preloading statically balanced compliant mechanisms. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Chicago, IL, USA, 12–15 August 2012; American Society of Mechanical Engineers: New York, NY, USA, 2012; Volume 45035, pp. 373–377. [Google Scholar]
- Li, Z.; Xu, M.; Norte, R.A.; Aragón, A.M.; Steeneken, P.G.; Alijani, F. Strain engineering of nonlinear nanoresonators from hardening to softening. Commun. Phys. 2024, 7, 53. [Google Scholar] [CrossRef]
- Ghanbari, M.; Rezazadeh, G.; Moloudpour-Tolkani, V.; Sheikhlou, M. Dynamic analysis of a novel wide-tunable microbeam resonator with a sliding free-of-charge electrode. Nonlinear Dyn. 2023, 111, 8039–8060. [Google Scholar] [CrossRef]
- Hussein, H.; Wang, C.; Amendoeira Esteves, R.; Kraft, M.; Fariborzi, H. Near-zero stiffness accelerometer with buckling of tunable electrothermal microbeams. Microsyst. Nanoeng. 2024, 10, 43. [Google Scholar] [CrossRef]
- Duan, Y.; Wei, X.; Wang, H.; Zhao, M.; Ren, Z.; Zhao, H.; Ren, J. Design and numerical performance analysis of a microgravity accelerometer with quasi-zero stiffness. Smart Mater. Struct. 2020, 29, 075018. [Google Scholar]
- De Laat, M.; Garza, H.P.; Herder, J.; Ghatkesar, M. A review on in situ stiffness adjustment methods in MEMS. J. Micromech. Microeng. 2016, 26, 063001. [Google Scholar]
- Guo, Y.; Ma, Z.; Zhang, T.; Zheng, X.; Jin, Z. A stiffness-tunable MEMS accelerometer. J. Micromech. Microeng. 2020, 31, 025005. [Google Scholar]
- Lee, K.B.; Lin, L.; Cho, Y.H. A closed-form approach for frequency tunable comb resonators with curved finger contour. Sensors Actuators A Phys. 2008, 141, 523–529. [Google Scholar] [CrossRef]
- Kuppens, P.; Bessa, M.; Herder, J.; Hopkins, J. Monolithic binary stiffness building blocks for mechanical digital machines. Extrem. Mech. Lett. 2021, 42, 101120. [Google Scholar] [CrossRef]
- Liang, H.; Hao, G.; Olszewski, O.Z.; Pakrashi, V. Ultra-low wide bandwidth vibrational energy harvesting using a statically balanced compliant mechanism. Int. J. Mech. Sci. 2022, 219, 107130. [Google Scholar]
- Wu, J.; Sun, H.; Zhou, G. True Random Number Generator Based on Chaotic Oscillation of a Tunable Double-Well MEMS Resonator. Small 2024, 20, 2403755. [Google Scholar] [CrossRef]
- Xu, Q. Design of a large-stroke bistable mechanism for the application in constant-force micropositioning stage. J. Mech. Robot. 2017, 9, 011006. [Google Scholar]
- Kapels, H.; Aigner, R.; Binder, J. Fracture strength and fatigue of polysilicon determined by a novel thermal actuator [MEMS]. IEEE Trans. Electron Devices 2000, 47, 1522–1528. [Google Scholar] [CrossRef]
- Legtenberg, R.; Groeneveld, A.; Elwenspoek, M. Comb-drive actuators for large displacements. J. Micromech. Microeng. 1996, 6, 320. [Google Scholar] [CrossRef]
- Cowen, A.; Hames, G.; Monk, D.; Wilcenski, S.; Hardy, B. SOIMUMPs Design Handbook; Memscap Inc.: Annecy, France, 2011; pp. 2002–2011. [Google Scholar]
- Elshurafa, A.M.; Khirallah, K.; Tawfik, H.H.; Emira, A.; Aziz, A.K.A.; Sedky, S.M. Nonlinear dynamics of spring softening and hardening in folded-MEMS comb drive resonators. J. Microelectromech. Syst. 2011, 20, 943–958. [Google Scholar]
- Zhang, H.; Wei, X.; Ding, Y.; Jiang, Z.; Ren, J. A low noise capacitive MEMS accelerometer with anti-spring structure. Sensors Actuators A Phys. 2019, 296, 79–86. [Google Scholar]
- Zhang, W.; Leea, J.E.Y. Frequency tuning in a MEMS resonator via an integral crossbar heater. Procedia Eng. 2012, 47, 949–952. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Density | Poisson’s Ratio | Young’s Modulus |
|---|---|---|
| 2329 | 0.28 | 169 GPa |
| Part | Description | Value |
|---|---|---|
| Self-locking | Length of plate springs | 300 m |
| Width of plate springs | 3 m | |
| Tooth spacing of the rack gears | 15 m | |
| Overlap of two teeth | 8 m | |
| Length of support beams | 700 m | |
| Width of support beams | 4 m | |
| Comb-drive | Length of fingers | 60 m |
| Width of fingers | 5 m | |
| Number of fingers | 88 | |
| Gap of two fingers | 3 m | |
| Overlap of two fingers | 20 m |
| Ref. | Scale | Method | Variation Range | Decrease Ratio |
|---|---|---|---|---|
| [16] | mm | Stiffness compensation | 6700 N/m to 80 N/m | 98.8% |
| [25] | m | Thermoelectric actuator | NA | 2.12% |
| [15] | m | Comb-finger capacitor with a curved contour | 2.64 N/m to 0.528 N/m | 80% |
| This work | m | Stiffness compensation | 606.62 N/m to 1.58 N/m | 99.7% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, T.; Wu, J.; Zhou, G. A Micromechanical Wide-Range Stiffness-Tuning Mechanism for MEMS Optical Switches. Micromachines 2025, 16, 397. https://doi.org/10.3390/mi16040397
Zhang T, Wu J, Zhou G. A Micromechanical Wide-Range Stiffness-Tuning Mechanism for MEMS Optical Switches. Micromachines. 2025; 16(4):397. https://doi.org/10.3390/mi16040397
Chicago/Turabian StyleZhang, Tongtian, Junhui Wu, and Guangya Zhou. 2025. "A Micromechanical Wide-Range Stiffness-Tuning Mechanism for MEMS Optical Switches" Micromachines 16, no. 4: 397. https://doi.org/10.3390/mi16040397
APA StyleZhang, T., Wu, J., & Zhou, G. (2025). A Micromechanical Wide-Range Stiffness-Tuning Mechanism for MEMS Optical Switches. Micromachines, 16(4), 397. https://doi.org/10.3390/mi16040397