Magneto-Impedance Sensor Driven by 400 MHz Logarithmic Amplifier

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Experimental Procedures and Results
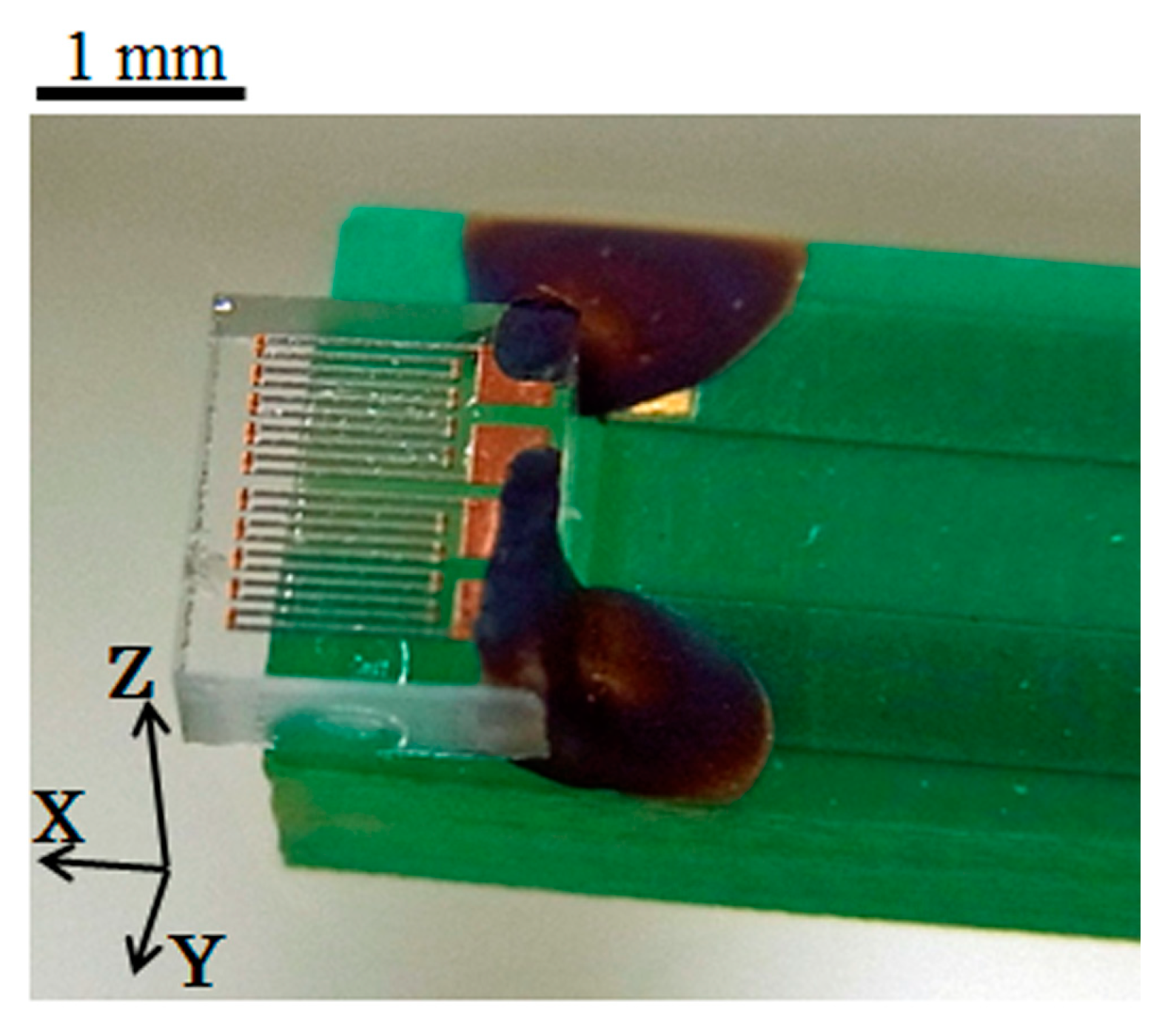
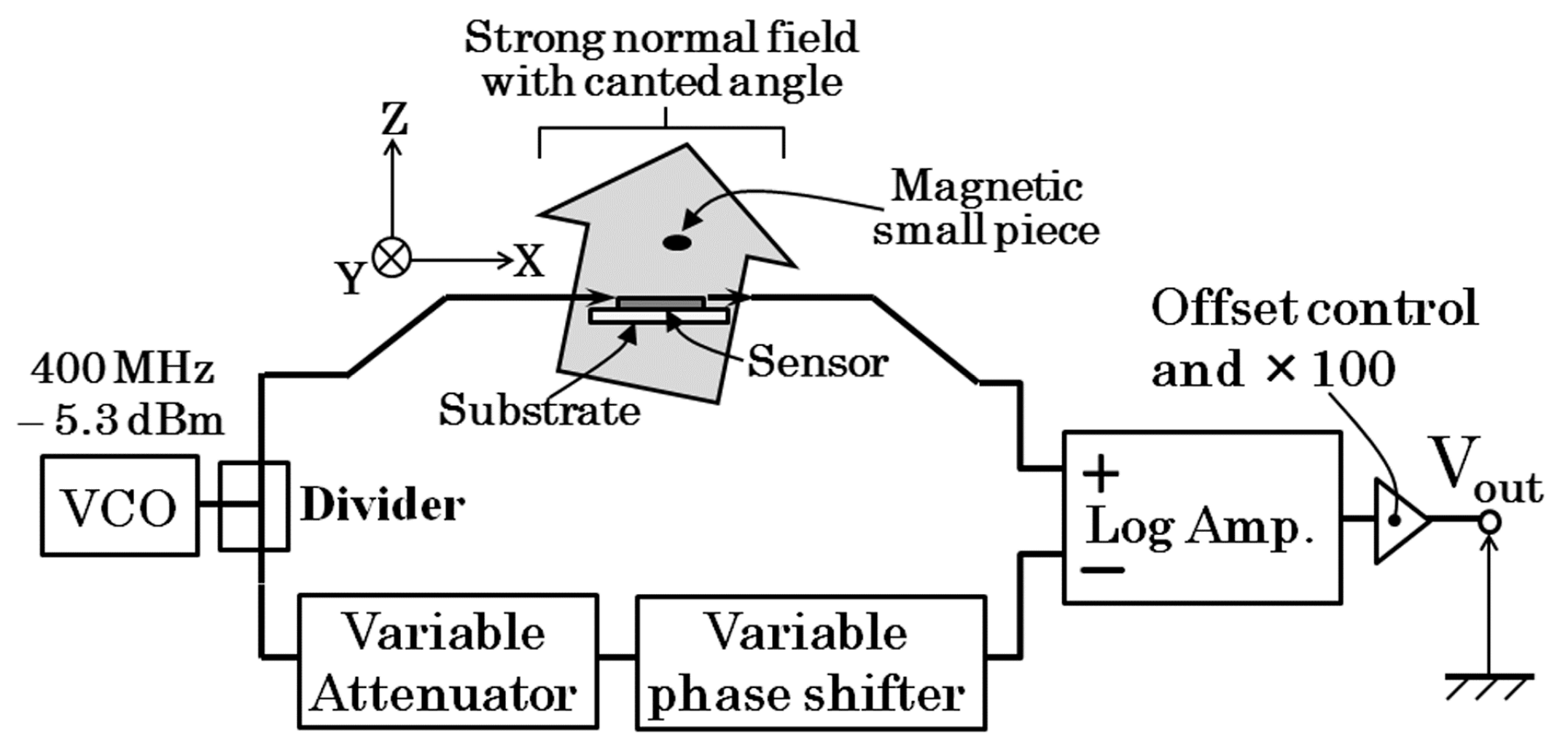
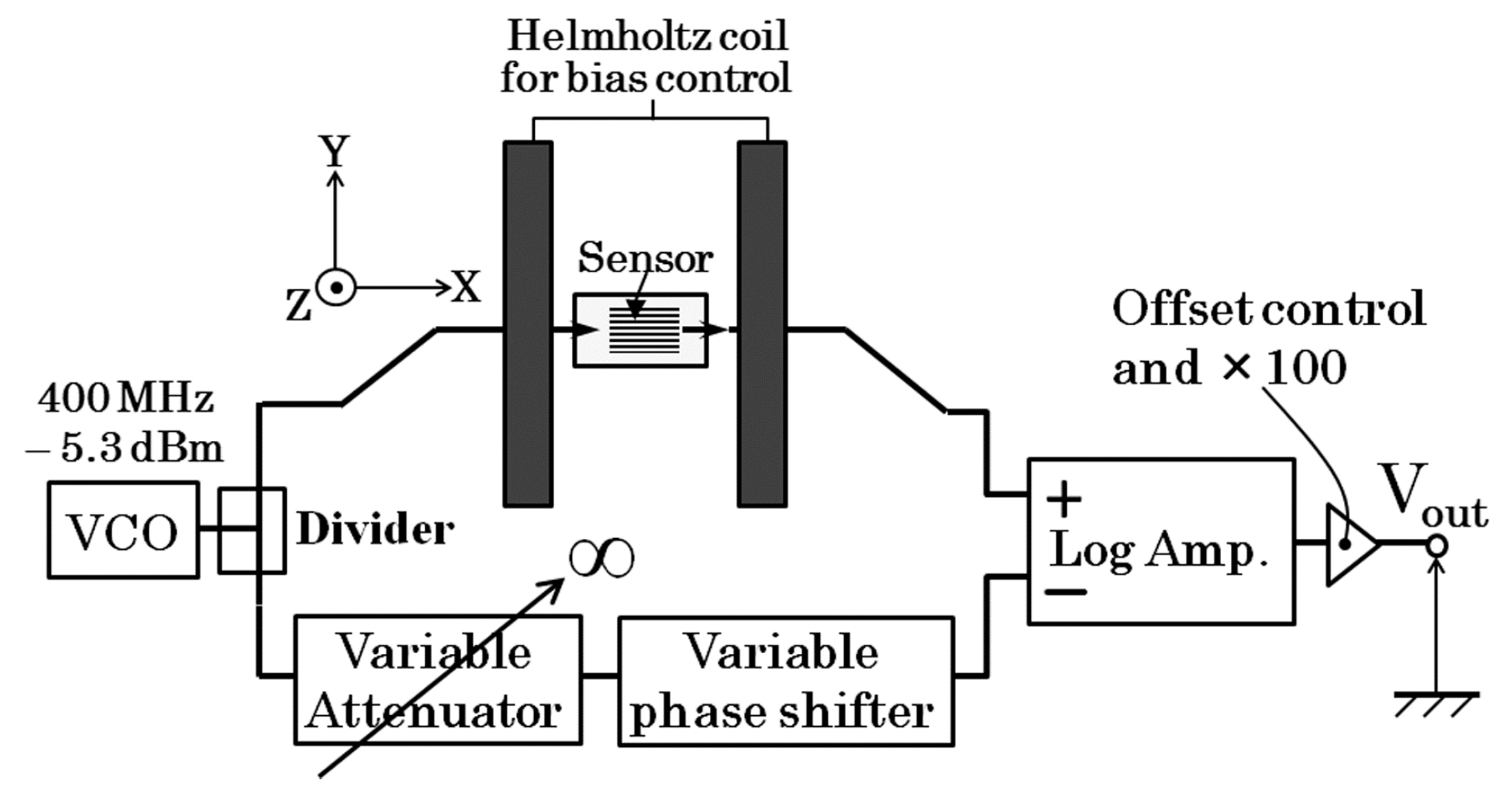
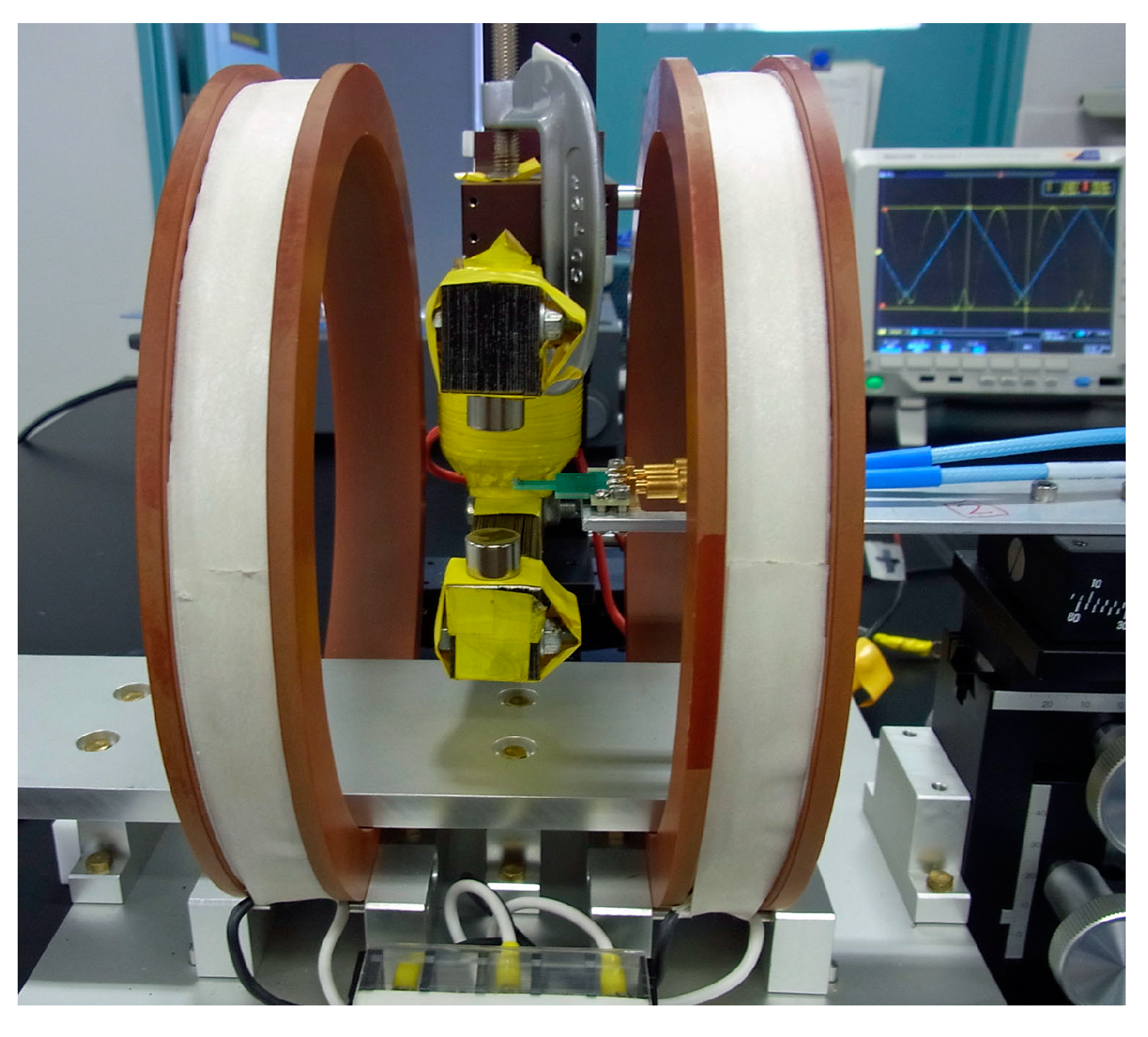
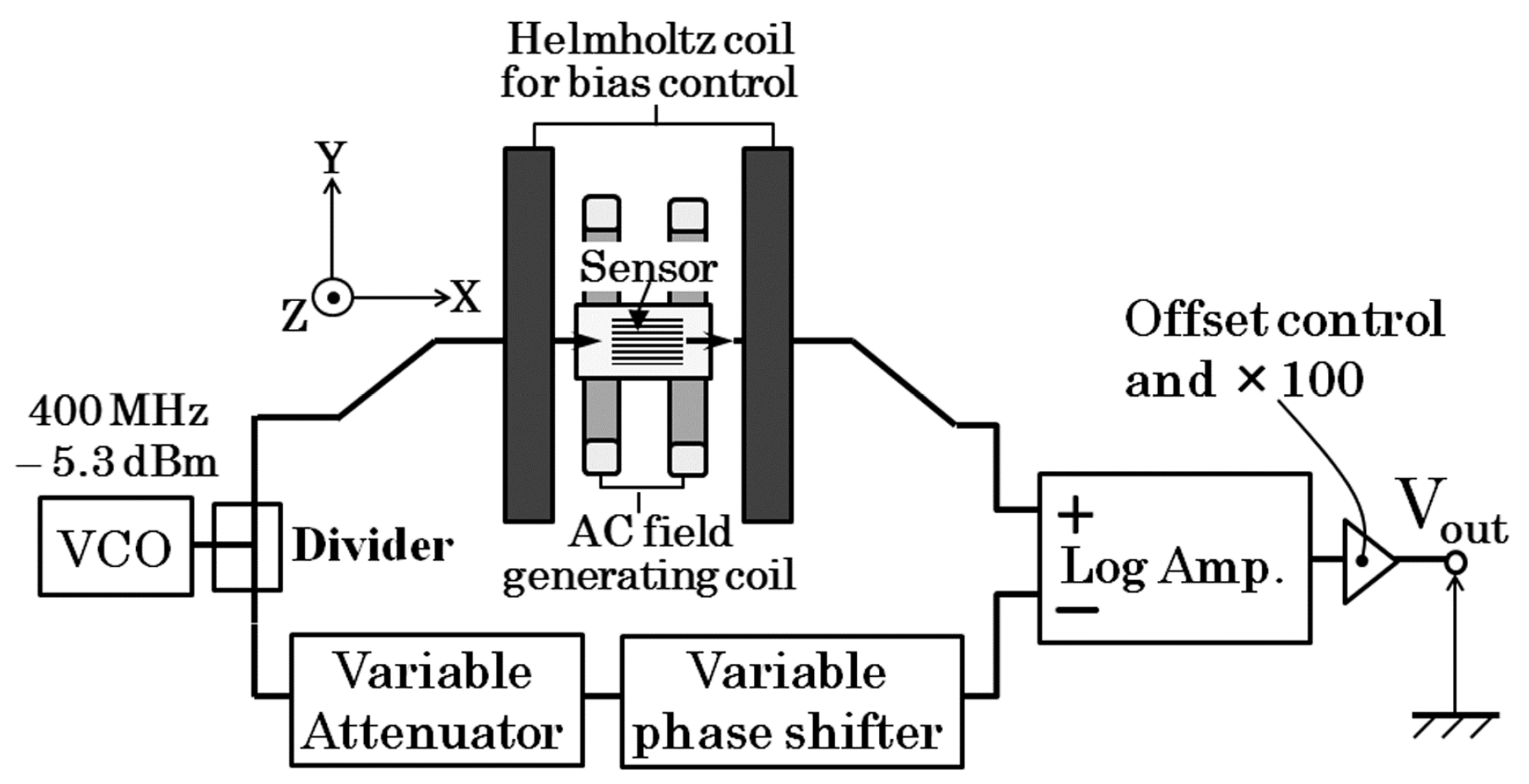
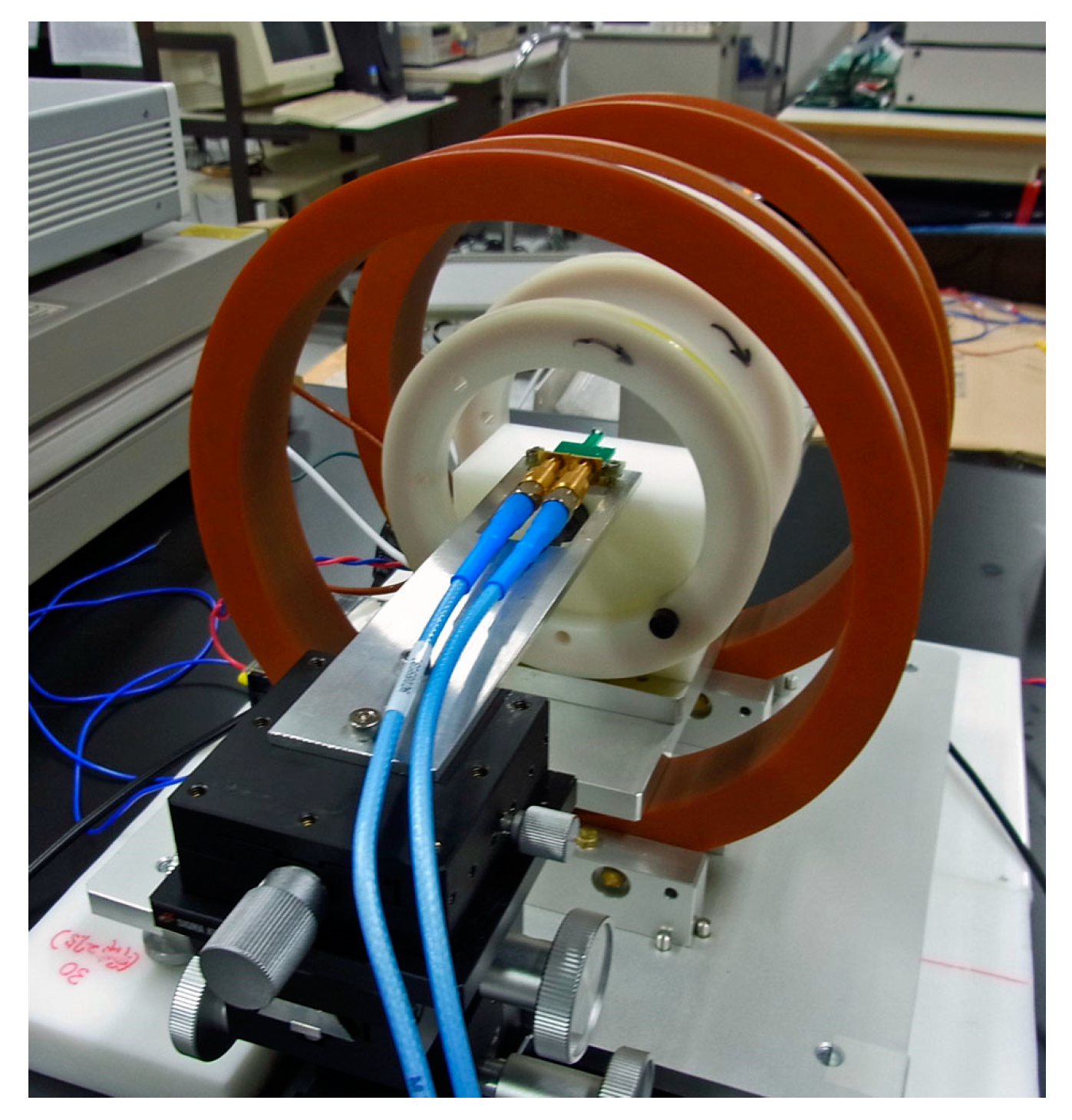
2.1. Sensor Element and Driving Circuit
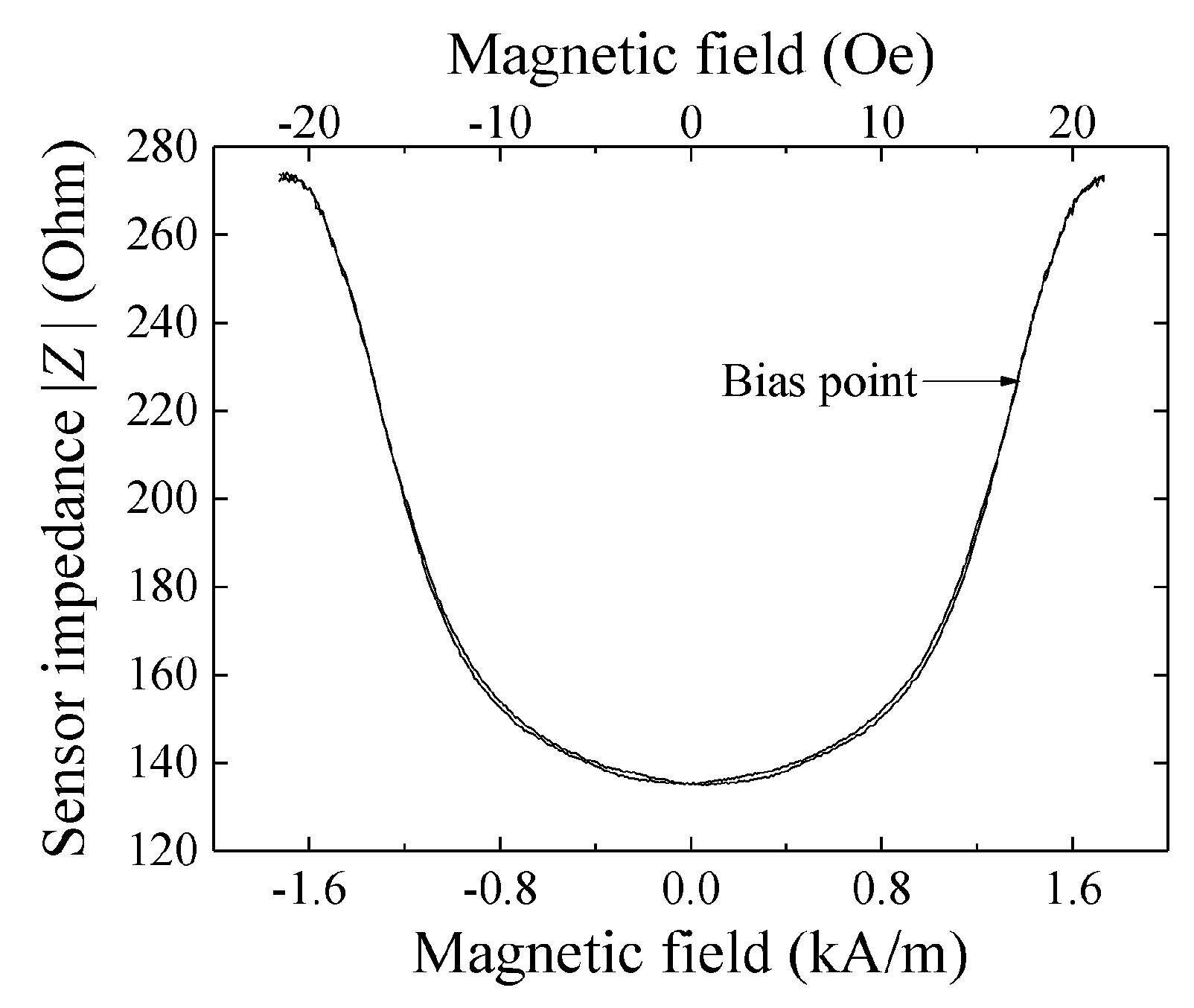
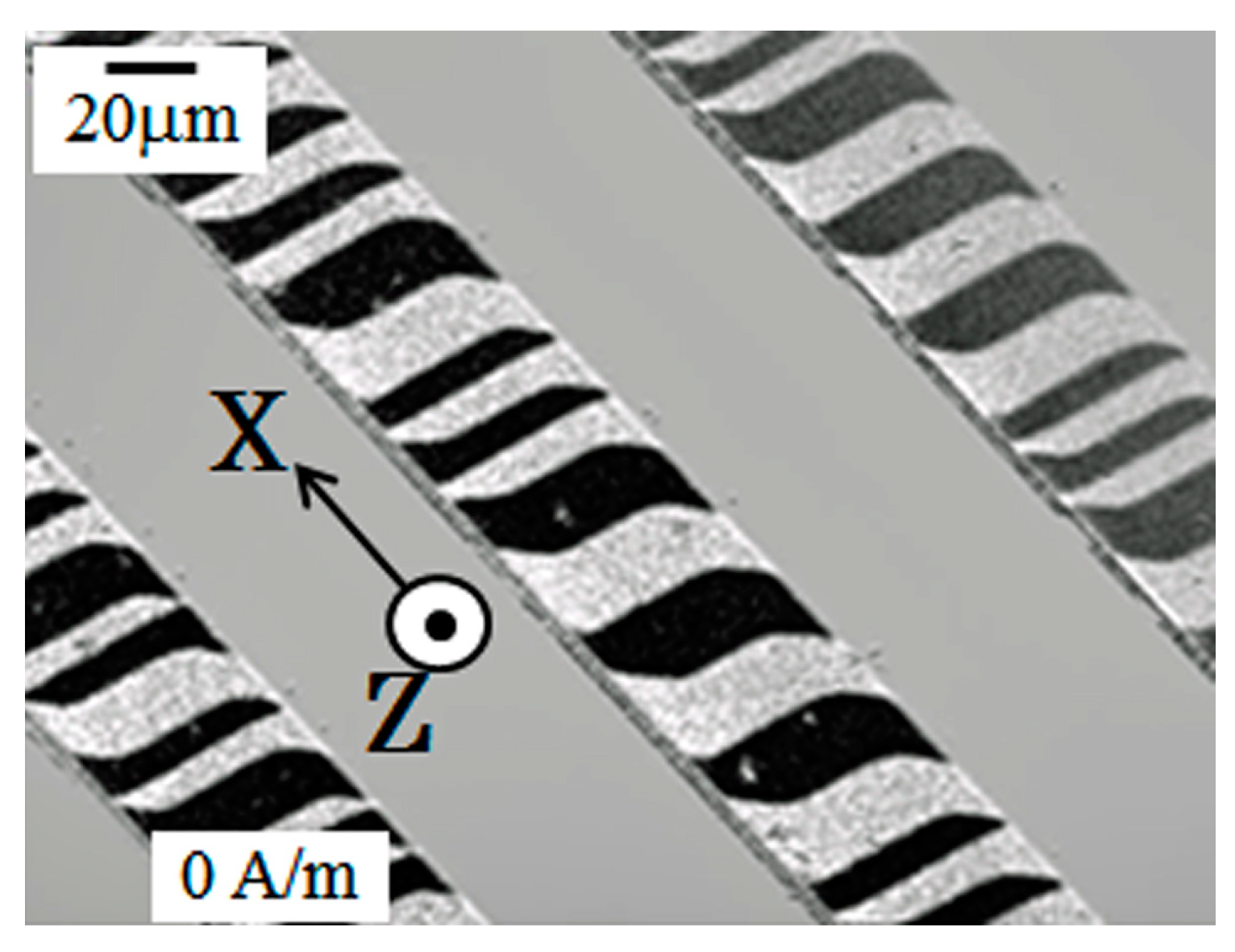
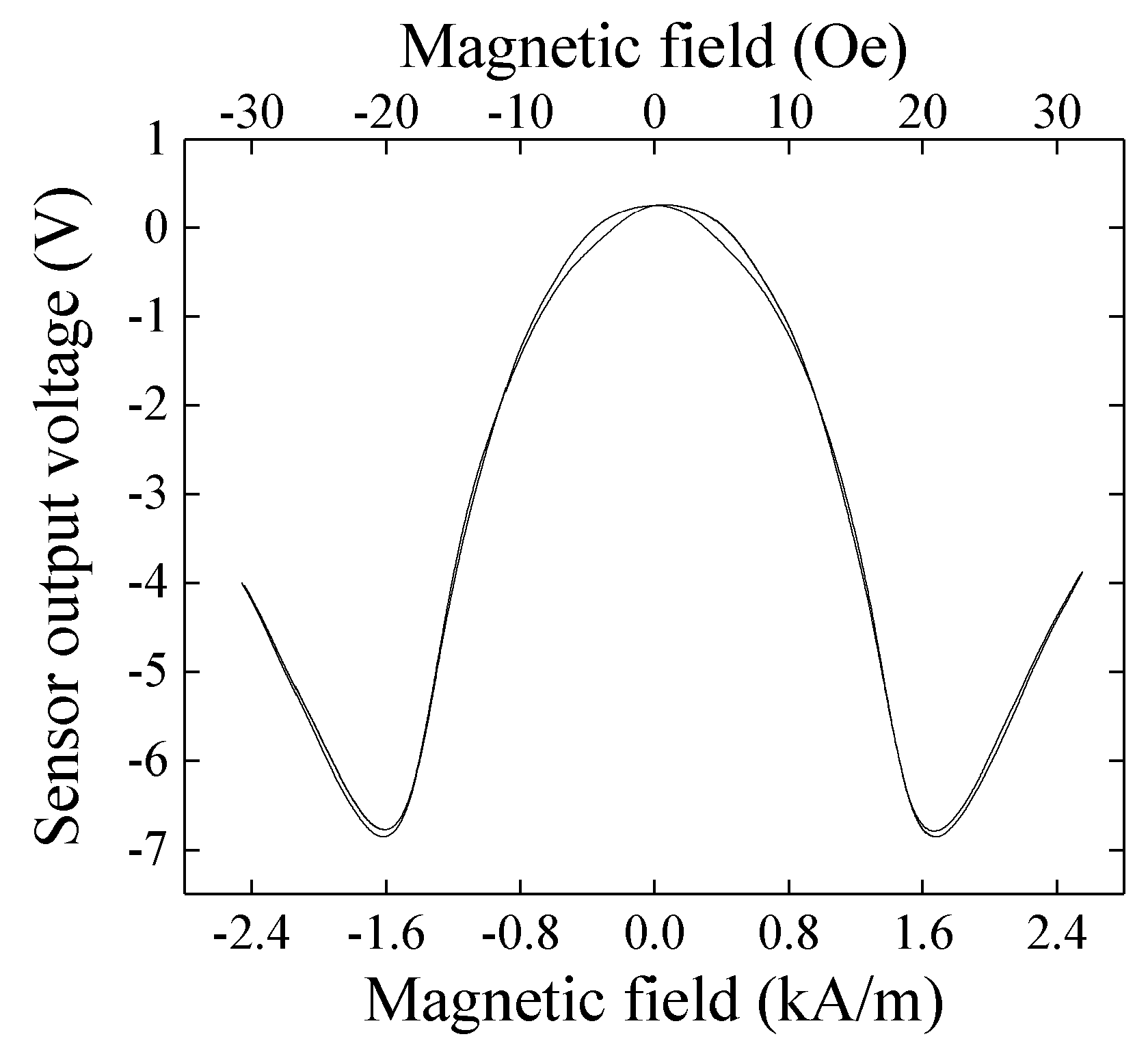
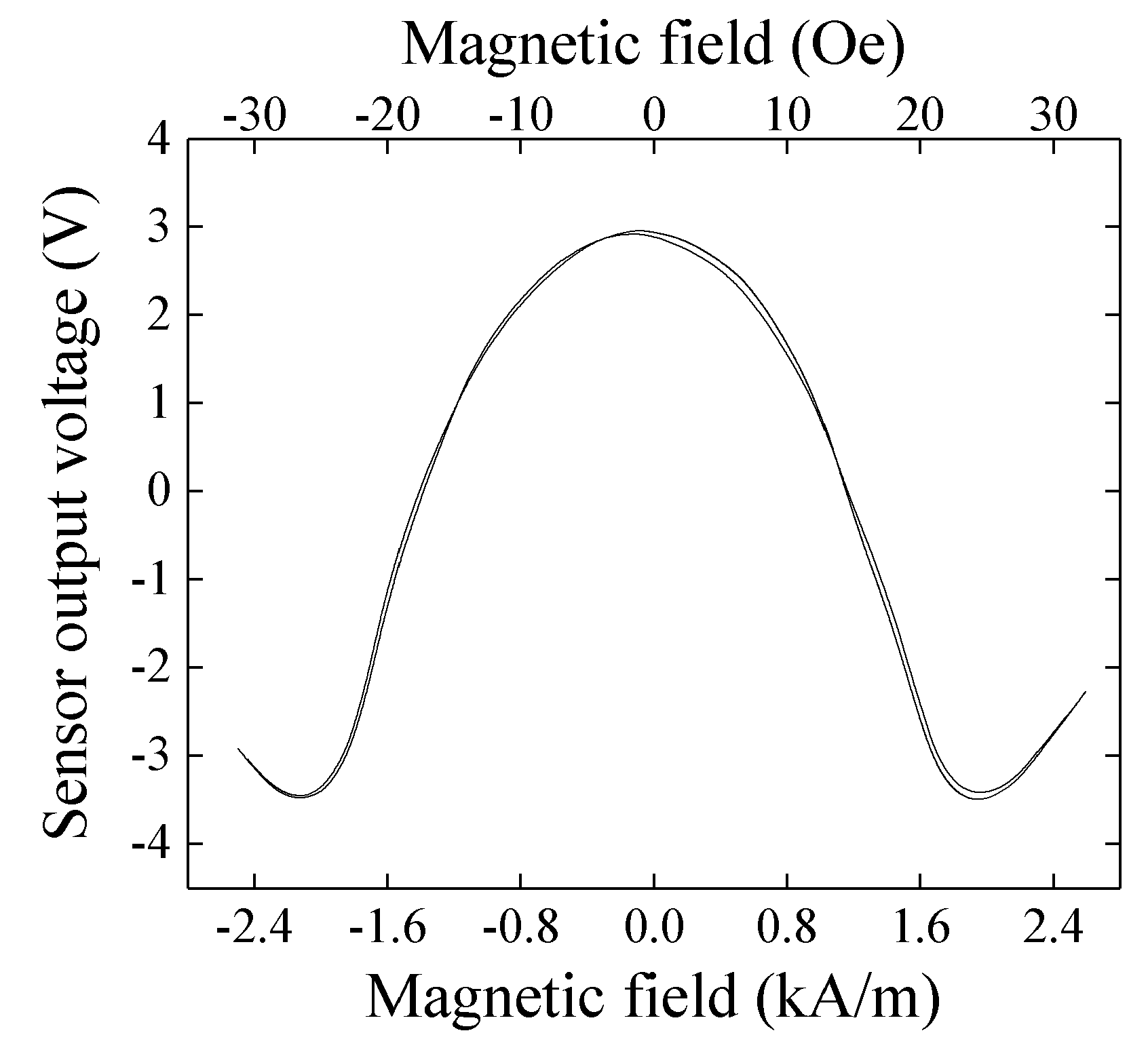
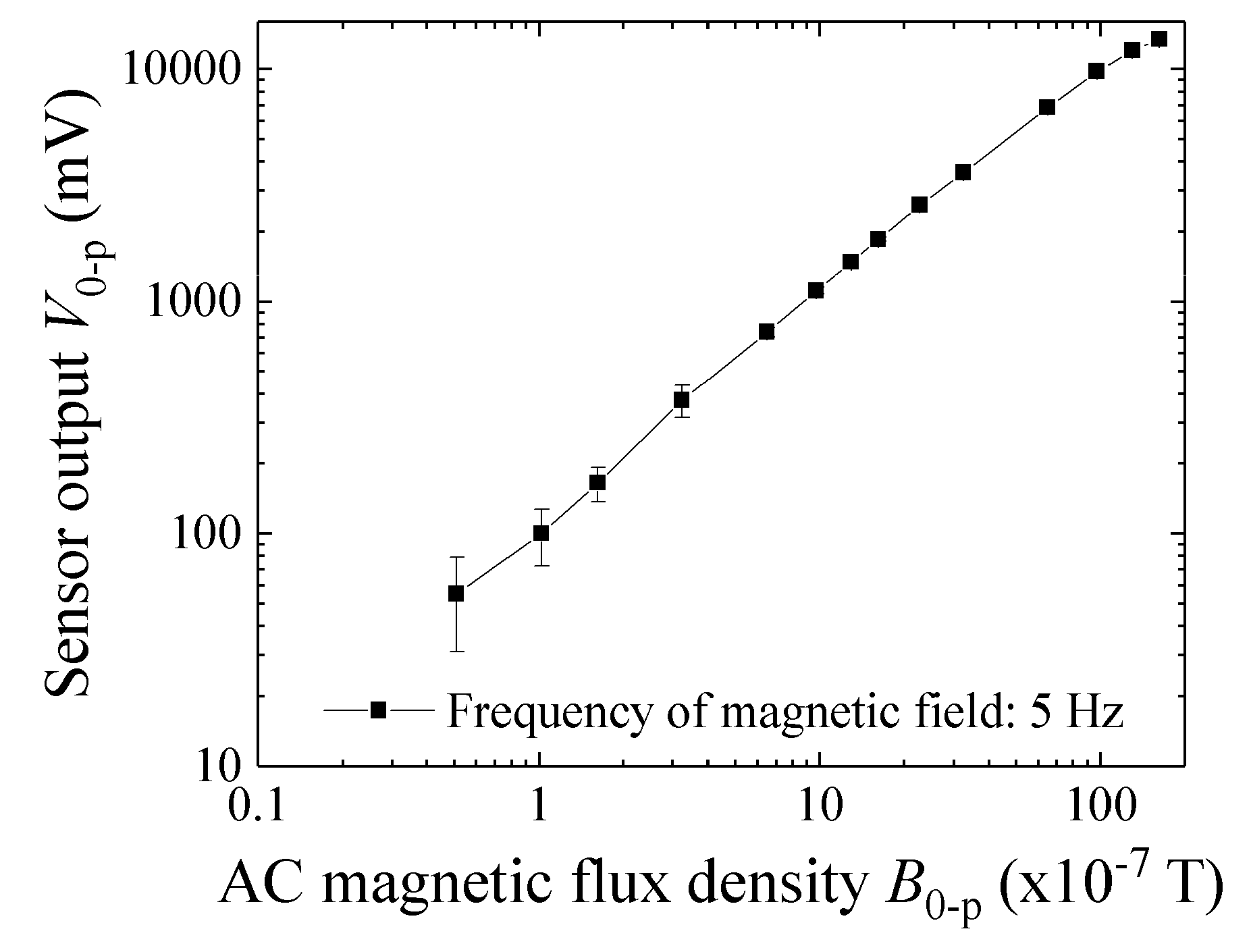
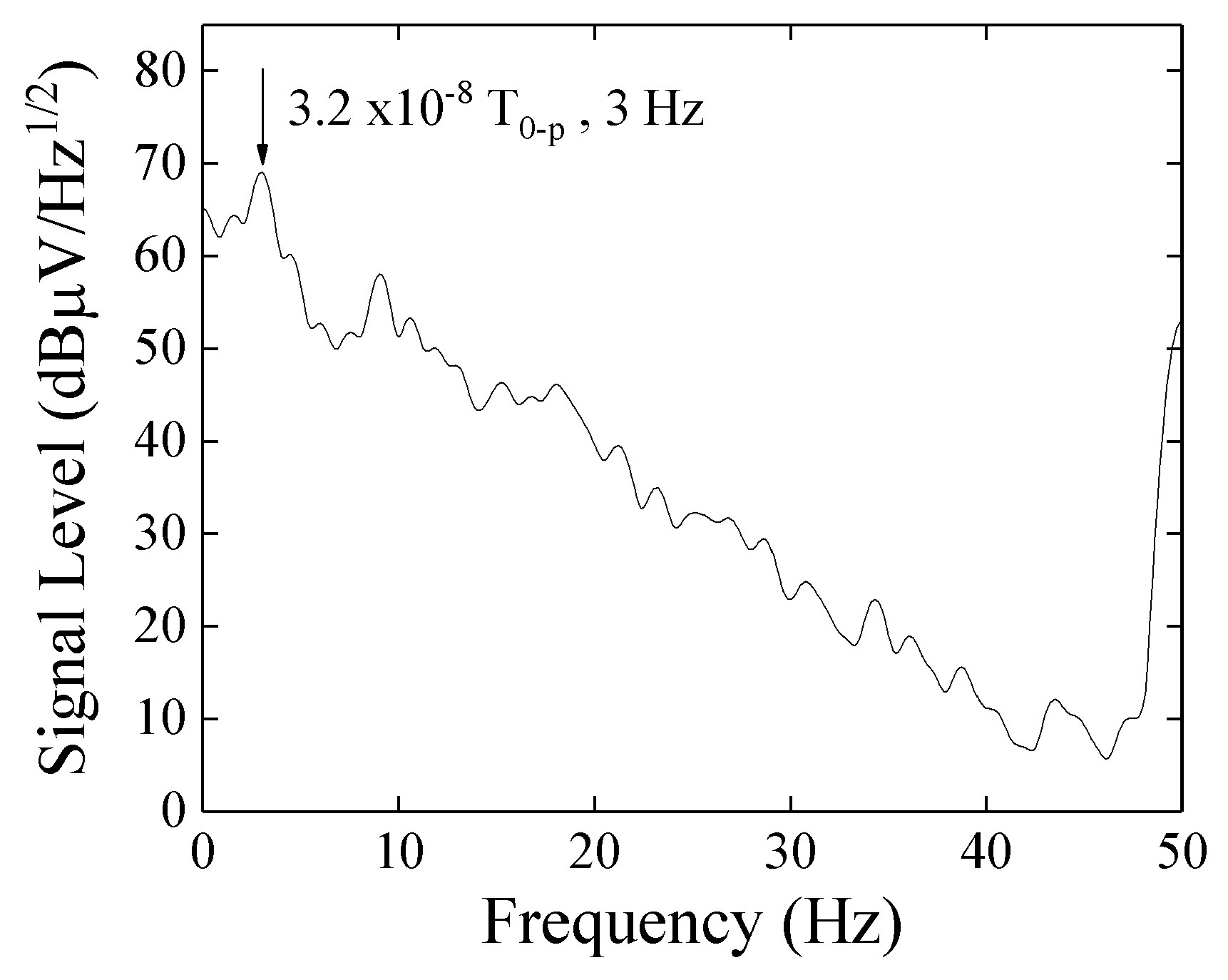
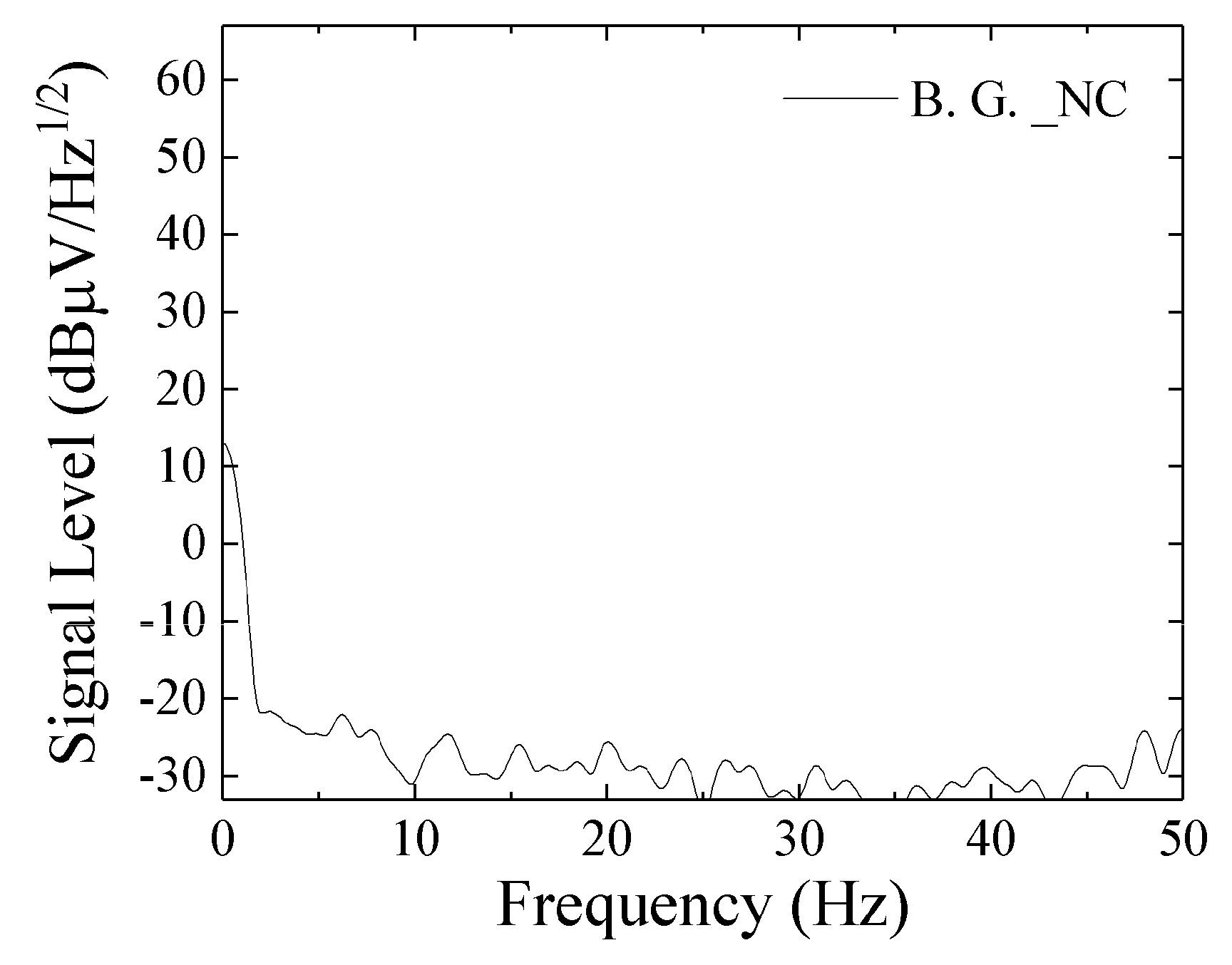
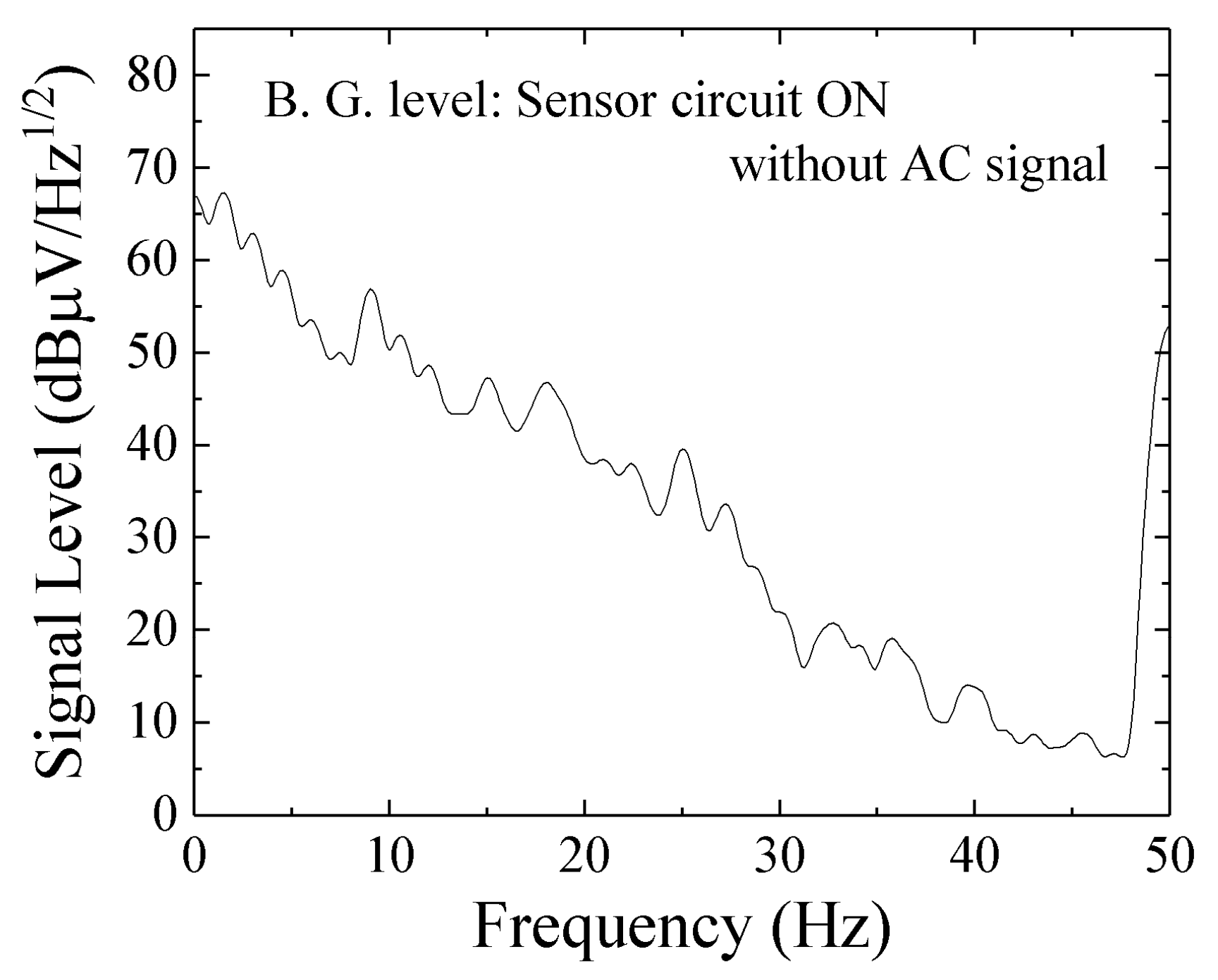
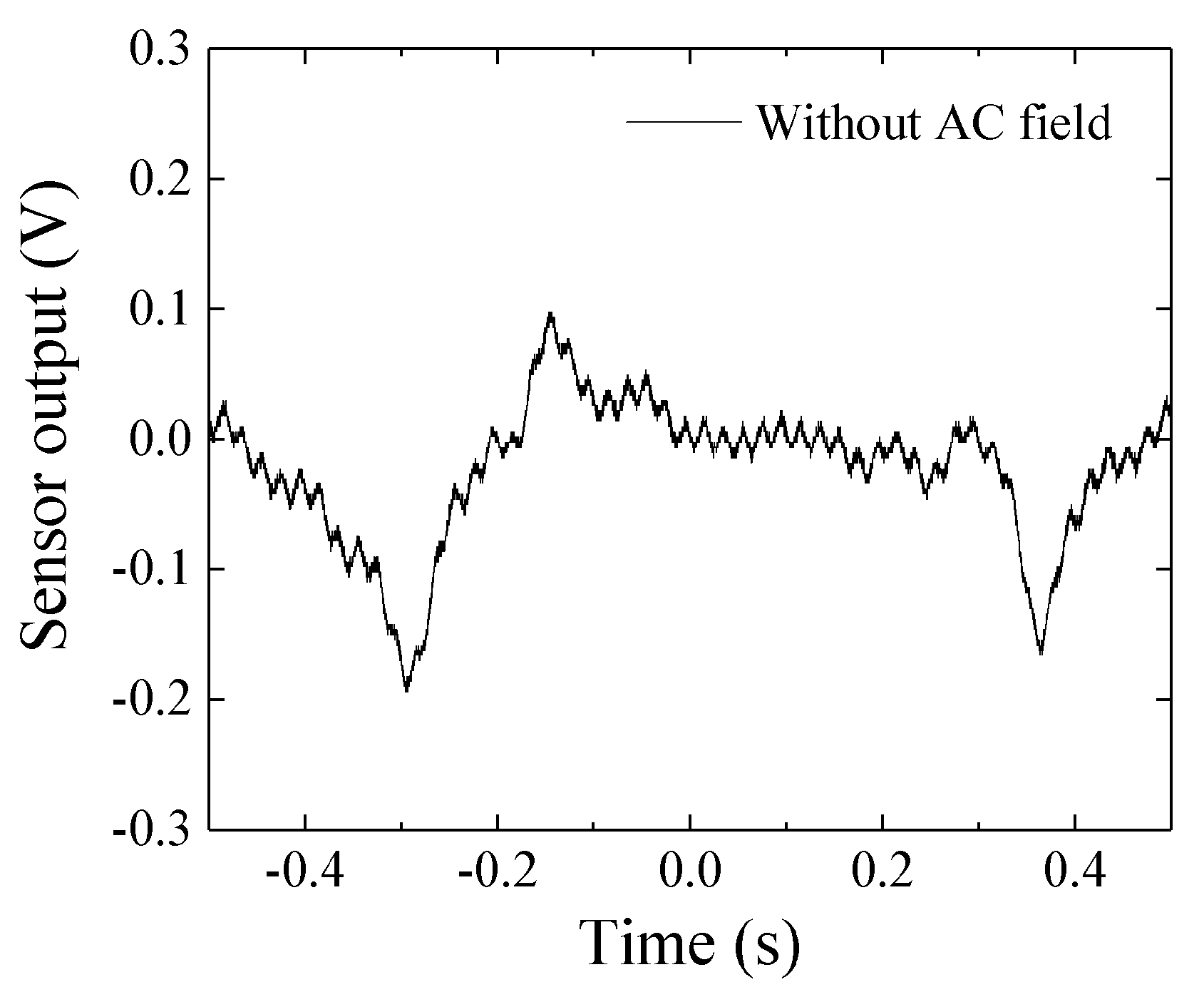
2.2. Results of Experiment
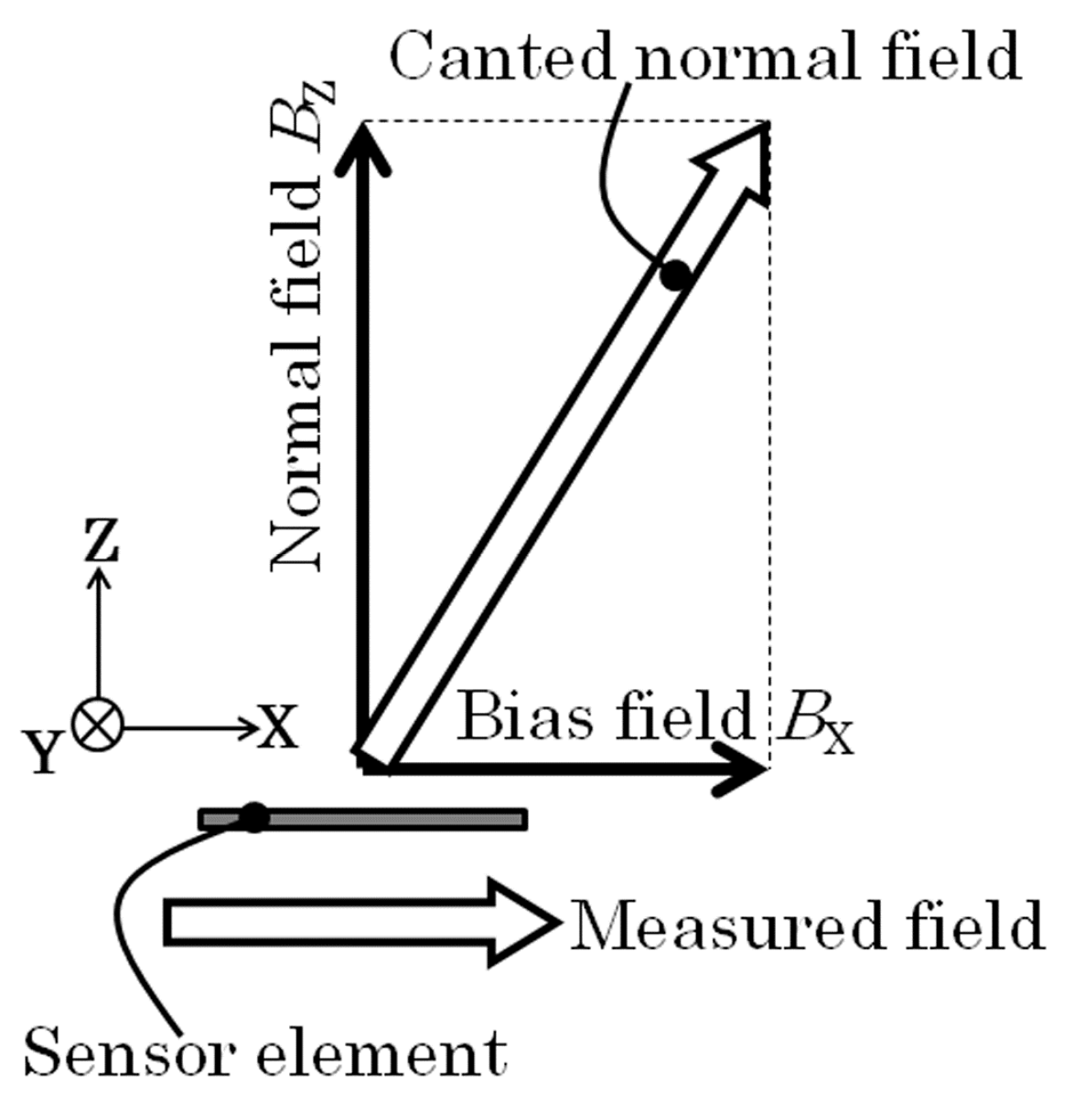
3. Discussion
4. Conclusion
Funding
Conflicts of Interest
References
- Mohri, K.; Bushida, K.; Noda, M.; Yoshida, H.; Panina, L.V.; Uchiyama, T. Magneto-Impedance Element. IEEE Trans. Magn. 1995, 31, 2455–2460. [Google Scholar] [CrossRef]
- Uchiyama, T.; Mohri, K.; Panina, L.V.; Furuno, K. Magneto-impedance in sputtered amorphous films for micro magnetic sensor. IEEE Trans. Magn. 1995, 31, 3182–3184. [Google Scholar] [CrossRef]
- Mohri, K.; Uchiyama, T.; Shen, L.P.; Cai, C.M.; Honkura, Y.; Aoyama, H. Amorphous wire and CMOS IC based sensitive micro-magnetic sensors utilizing magneto-impedance (MI) and stress-impedance (SI) effects and applications. In MHS2001. Proceedings of 2001 International Symposium on Micromechatronics and Human Science (Cat. No. 01TH8583); IEEE: Piscataway, NJ, USA, 2001; pp. 25–34. [Google Scholar]
- Raposo, V.; Vazquez, M.; Flores, A.G.; Zazo, M.; Iniguez, J.I. Giant magnetoimpedance effect enhancement by circuit matching. Sens. Actuators A 2003, 106, 329–332. [Google Scholar] [CrossRef]
- Yabukami, S.; Suzuki, T.; Ajiro, N.; Kikuchi, H.; Yamaguchi, M.; Arai, K.I. A high frequency carrier-type magnetic field sensor using carrier suppressing circuit. IEEE Trans. Magn. 2001, 37, 2019–2021. [Google Scholar] [CrossRef]
- Zhao, W.; Bu, X.; Yu, G.; Xiang, C. Feedback-type giant magneto-impedance sensor based on longitudinal excitation. J. Magn. Magn. Mater. 2012, 324, 3073–3077. [Google Scholar] [CrossRef]
- Nakai, T. Study on detection of small particle using high-frequency carrier-type thin film magnetic field sensor with subjecting to strong normal field. The papers of Technical Meeting on Physical Sensor, IEE Japan, PHS-16-15. 2016, pp. 11–20. (In Japanese). Available online: http://id.nii.ac.jp/1031/00093680/ (accessed on 30 April 2019).
- Nakai, T. Study on low bias GMI sensor with controlled inclined angle of stripe magnetic domain. Ph.D. Thesis, Tohoku University, Sendai, Japan, 2005. [Google Scholar]
- Fernandez, E.; Garcia-Arribas, A.; Barandiarán, J.M.; Svalov, A.V.; Kurlyandskaya, G.V.; Dolabdjian, C.P. Equivalent Magnetic Noise of Micro-Patterned Multilayer Thin Films Based GMI Microsensor. IEEE Sens. J. 2015, 15, 6707–6714. [Google Scholar] [CrossRef]
- Thiabgoh, O.; Shen, H.; Eggers, T.; Galati, A.; Jiang, S.; Liu, J.S.; Li, Z.; Sun, J.S.; Srikanth, H.; Phan, M.H. Enhanced high-frequency magneto-impedance response of melt-extracted Co69.25Fe4.25Si13B13.5 microwires subject to Joule annealing. J. Sci. Adv. Mater. Devices 2016, 1, 69–74. [Google Scholar] [CrossRef]
- Chlenova, A.A.; Moiseev, A.A.; Derevyanko, M.S.; Semirov, A.V.; Lepalovsky, V.N.; Kurlyandskaya, G.V. Permalloy-Based Thin Film Structures: Magnetic Properties and Giant Magnetoimpedance Effect in the Temperature Range Important for Biomedical Applications. Sensors 2017, 17, 1900. [Google Scholar] [CrossRef] [PubMed]
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nakai, T. Magneto-Impedance Sensor Driven by 400 MHz Logarithmic Amplifier. Micromachines 2019, 10, 355. https://doi.org/10.3390/mi10060355
Nakai T. Magneto-Impedance Sensor Driven by 400 MHz Logarithmic Amplifier. Micromachines. 2019; 10(6):355. https://doi.org/10.3390/mi10060355
Chicago/Turabian StyleNakai, Tomoo. 2019. "Magneto-Impedance Sensor Driven by 400 MHz Logarithmic Amplifier" Micromachines 10, no. 6: 355. https://doi.org/10.3390/mi10060355
APA StyleNakai, T. (2019). Magneto-Impedance Sensor Driven by 400 MHz Logarithmic Amplifier. Micromachines, 10(6), 355. https://doi.org/10.3390/mi10060355