Design of Wearable Headset with Steady State Visually Evoked Potential-Based Brain Computer Interface

Abstract
:1. Introduction
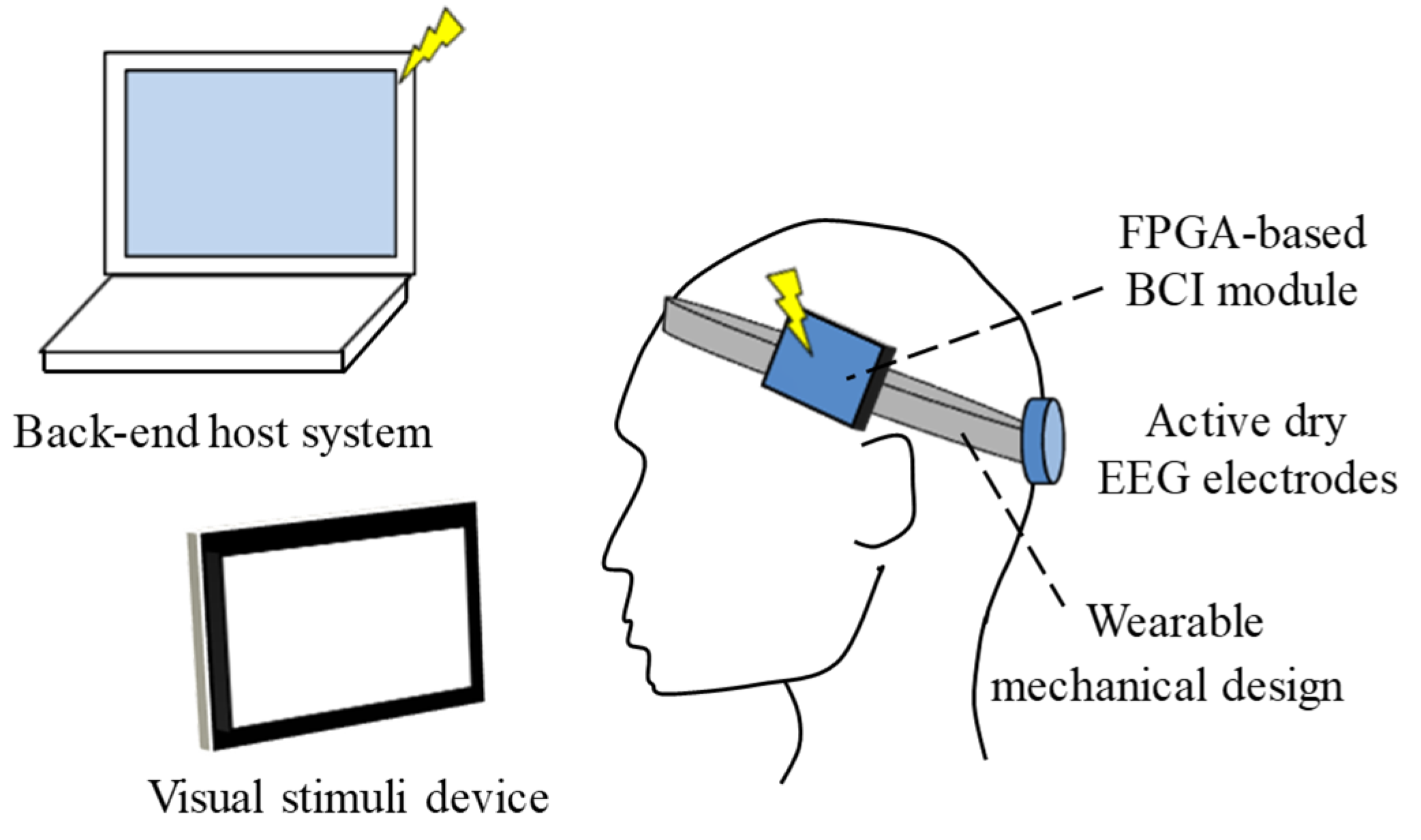
2. System Architecture and Implementation
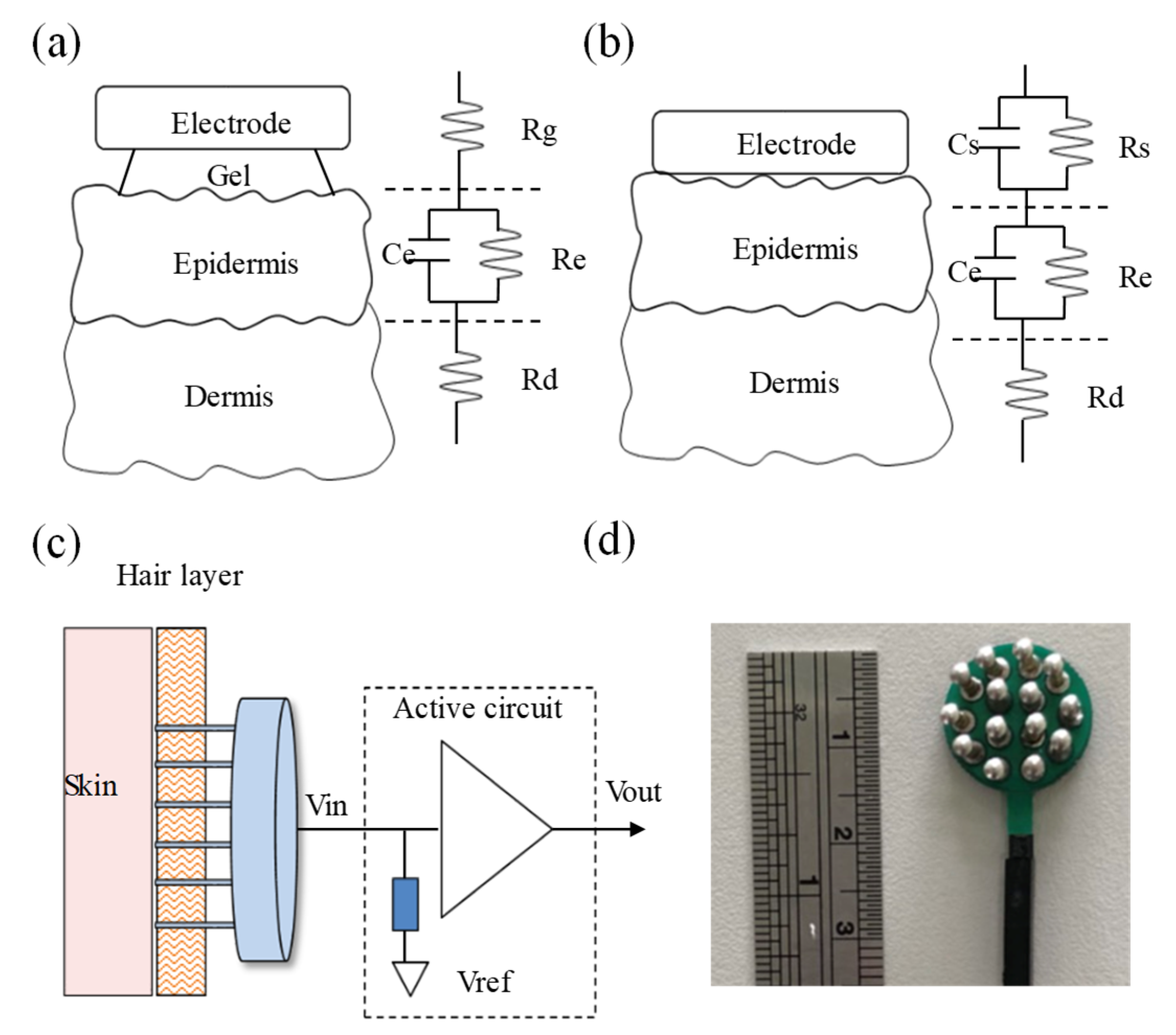
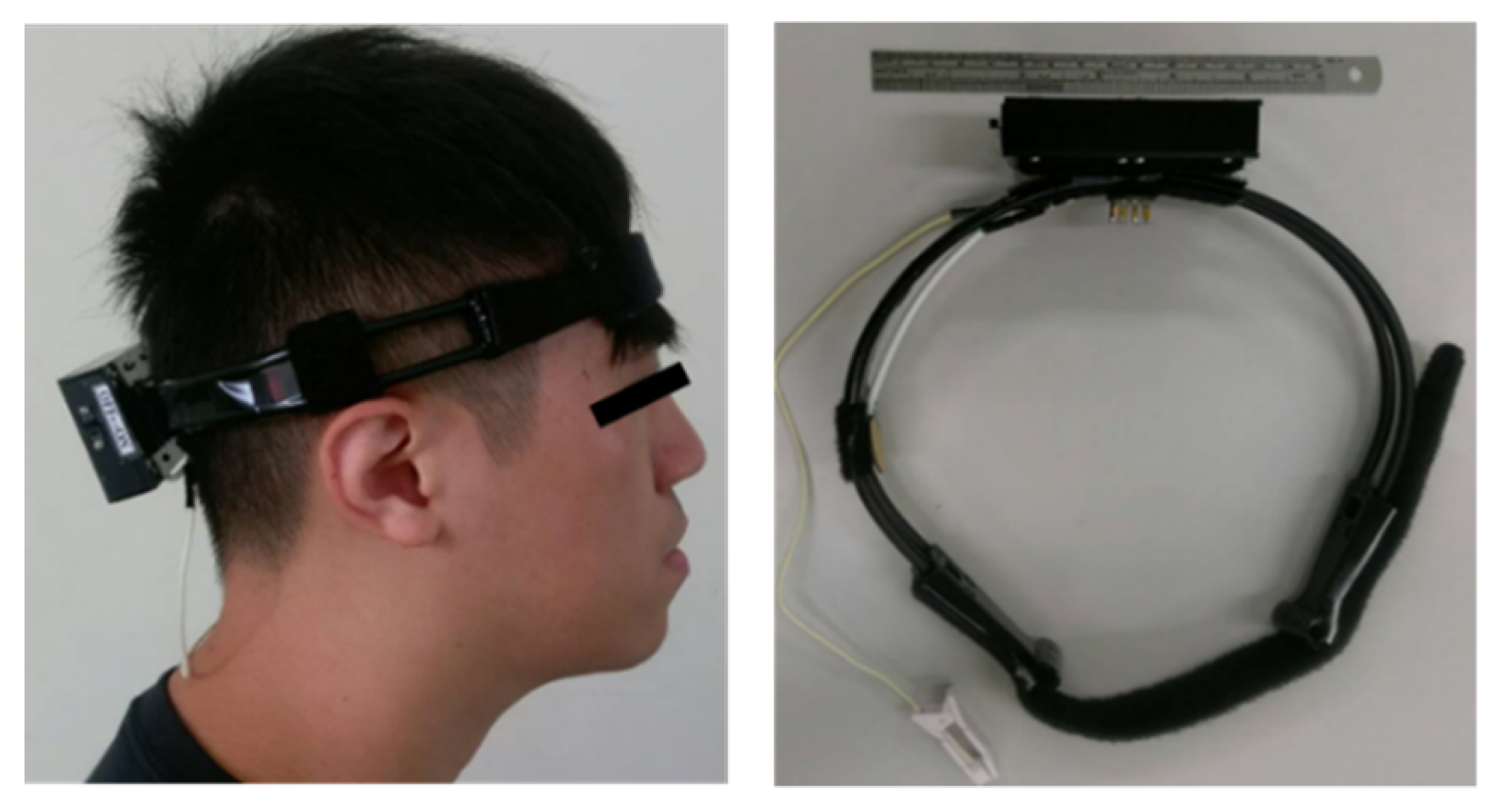
2.1. Active Dry EEG Electrodes and Wearable Mechanical Design
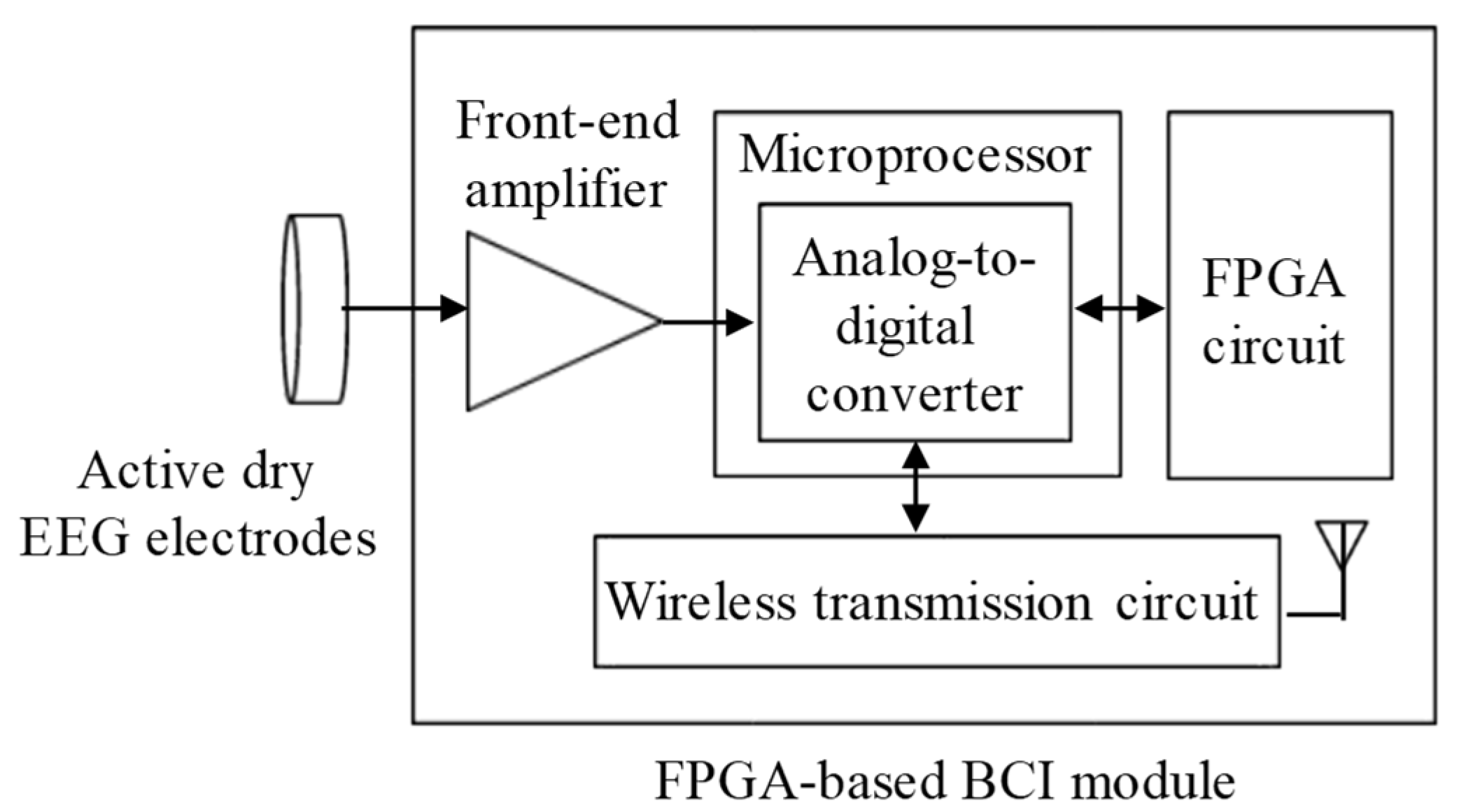
2.2. FPGA-Based BCI Module
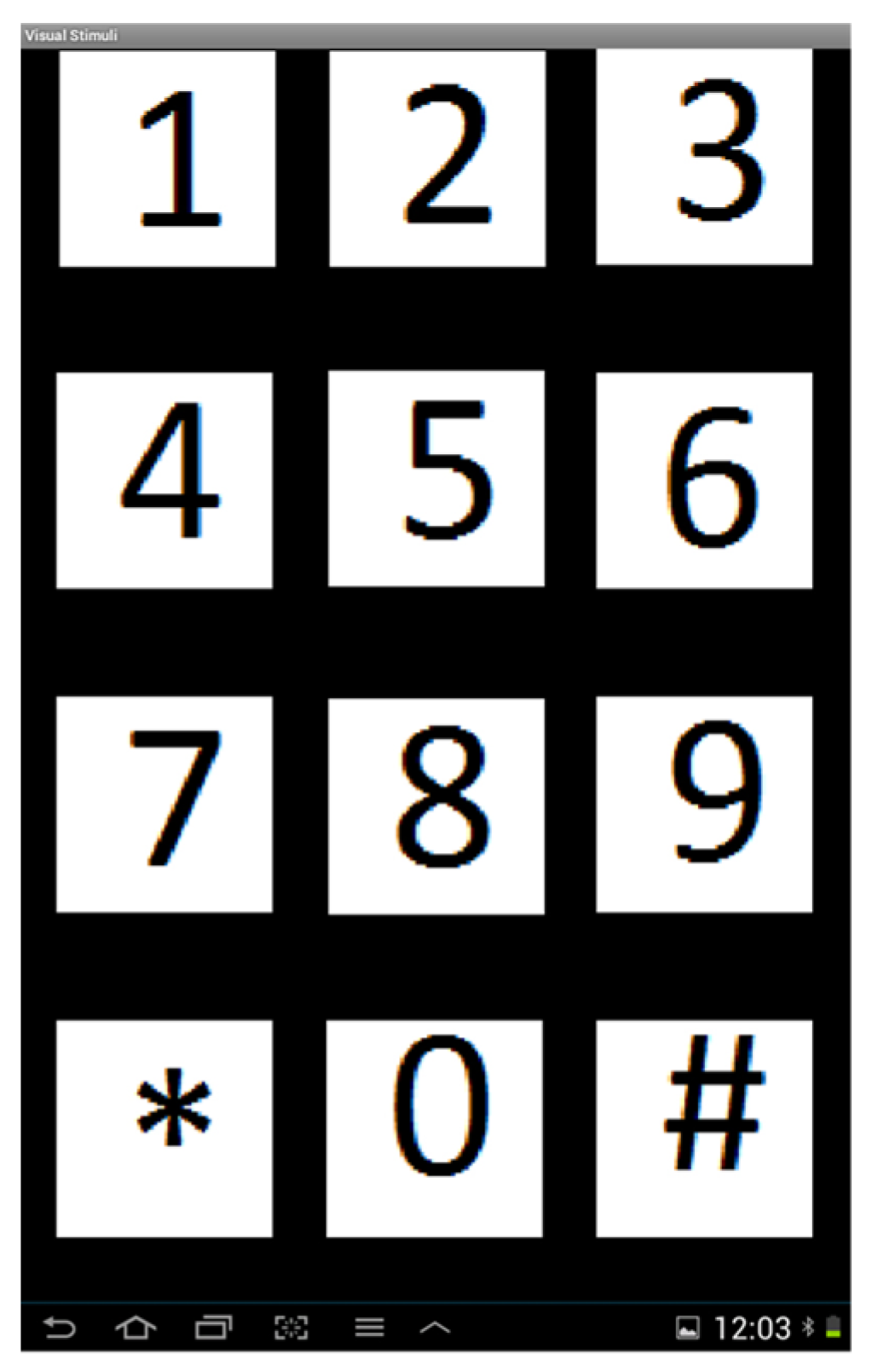
2.3. Visual Stimulus Device
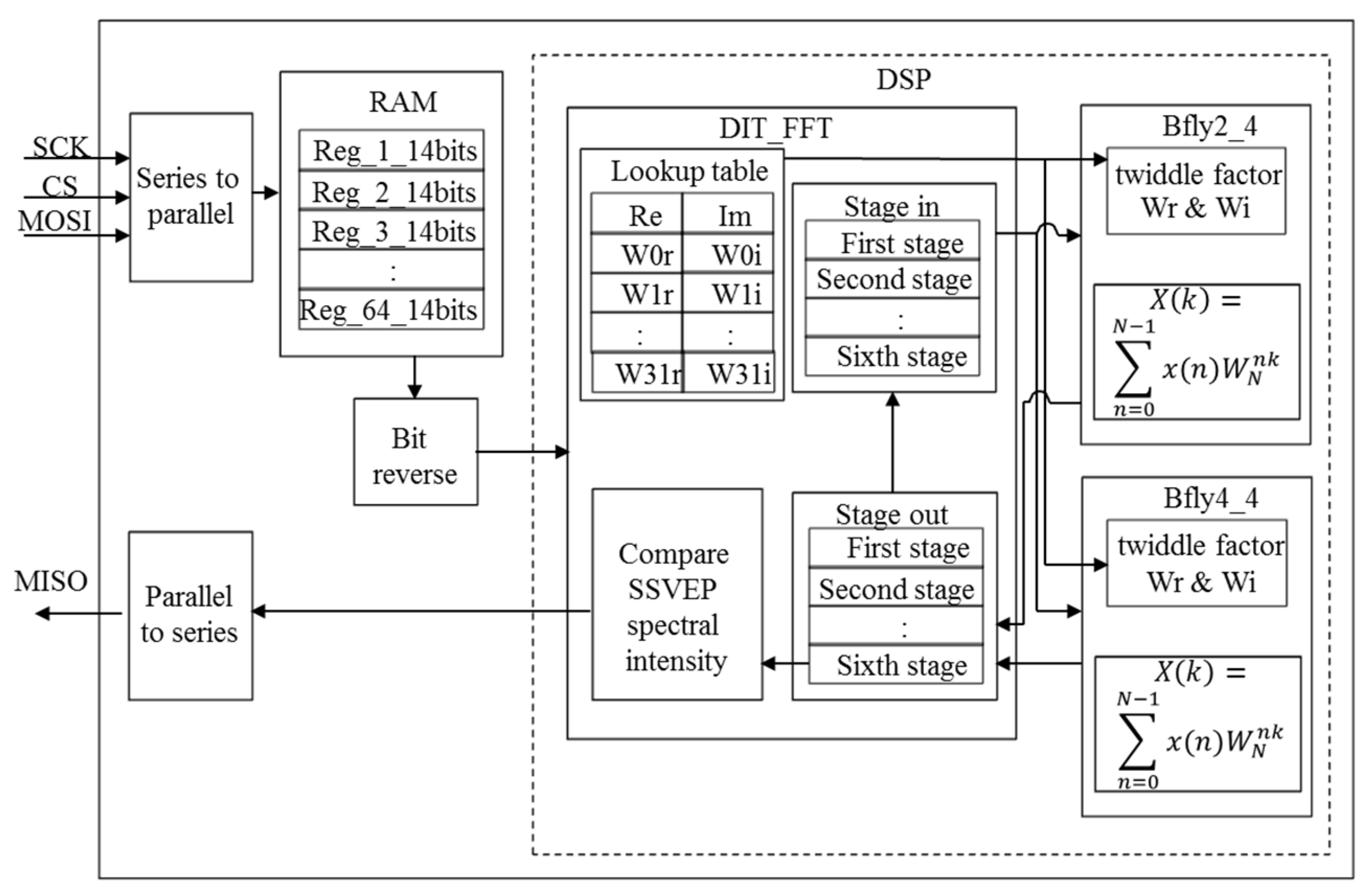
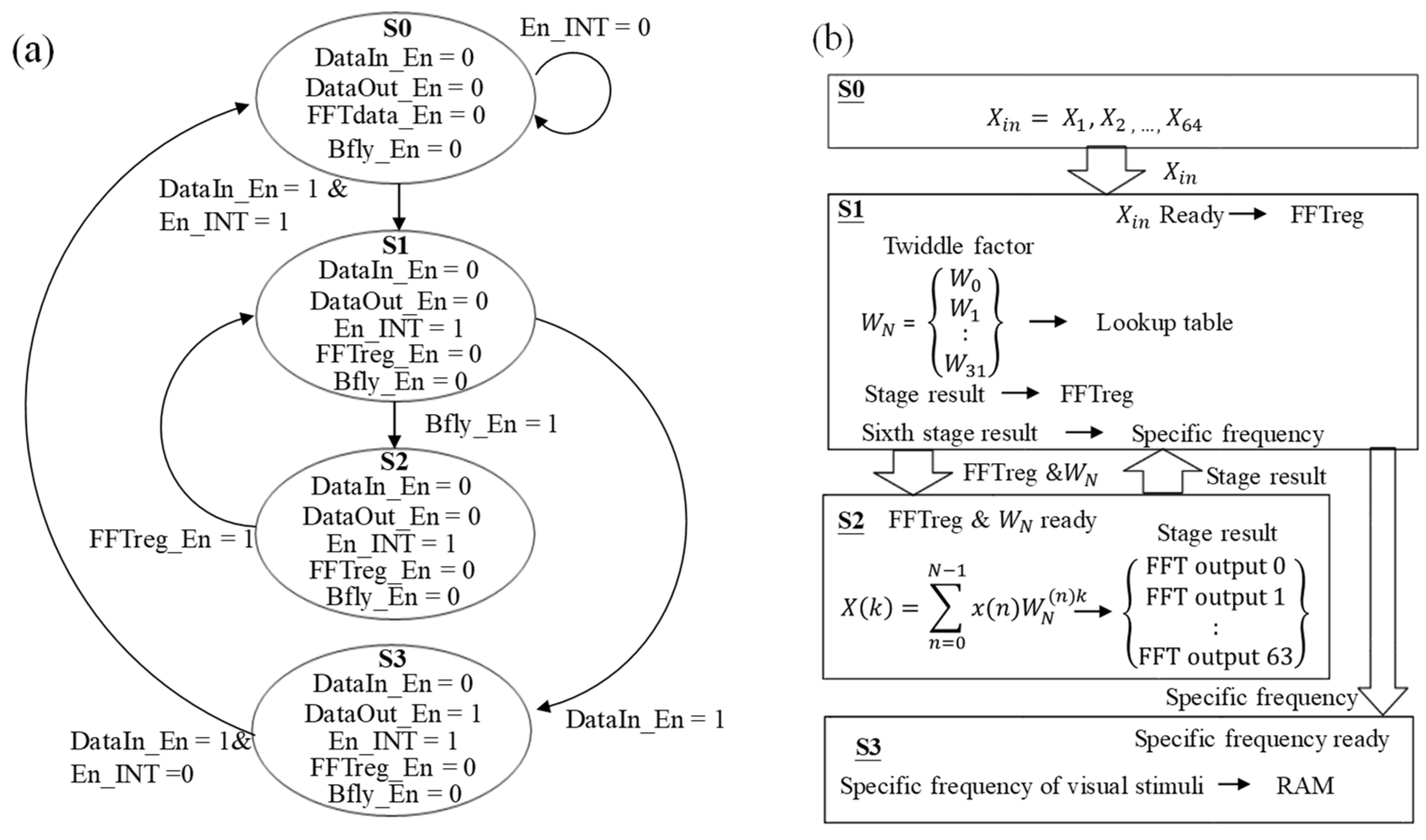
2.4. Implementation of SSVEP BCI Algorithm in FPGA
3. Results
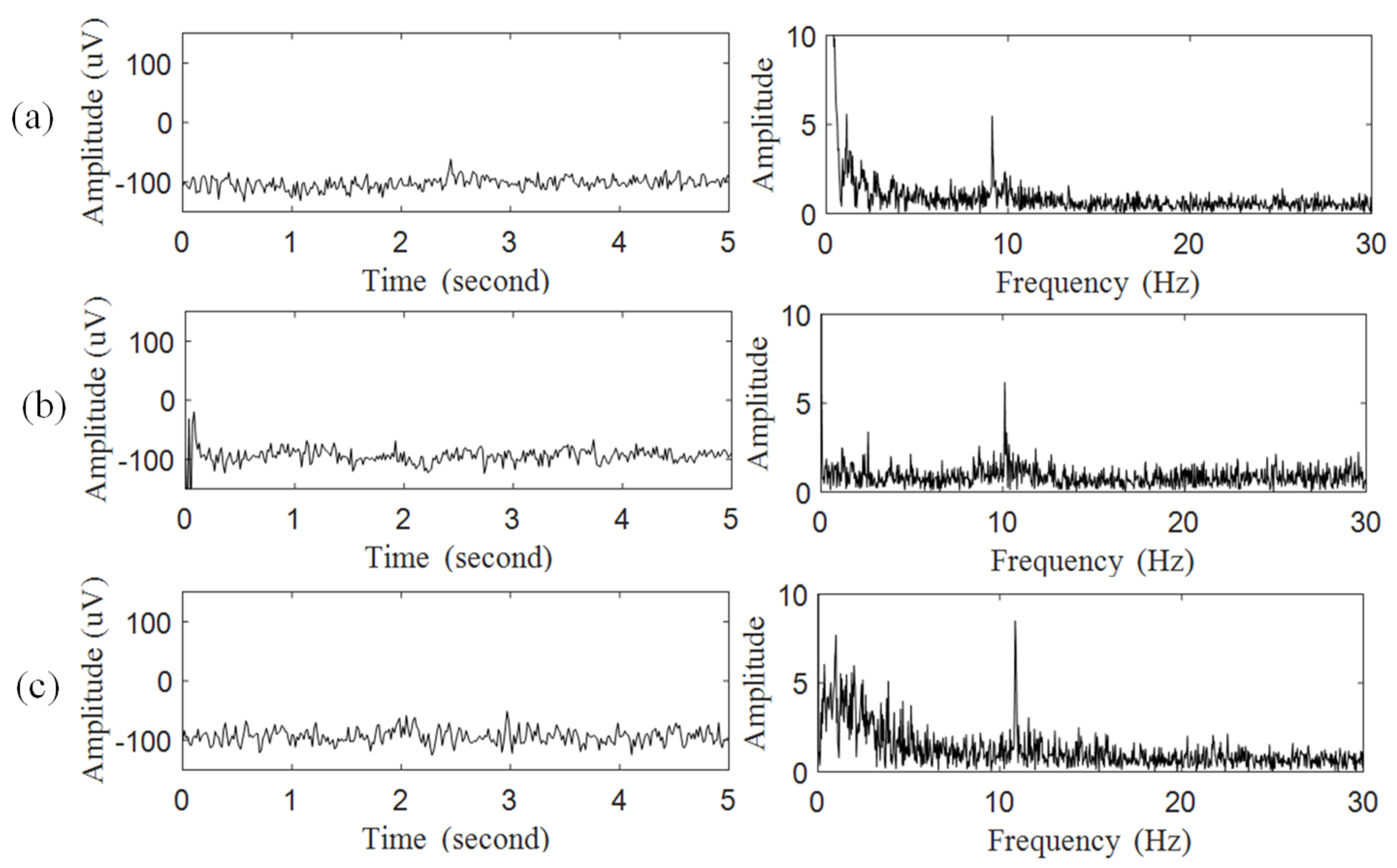
3.1. Performance of Proposed System on Detecting SSVEP
3.2. Information Transfer Rate of Proposed System
4. Discussions
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lebedev, M.A.; Nicolelis, M.A. Brain–machine interfaces: Past, present and future. Trends Neurosci. 2006, 29, 536–546. [Google Scholar] [CrossRef] [PubMed]
- Wolpaw, J.R.; Birbaumer, N.; McFarland, D.J.; Pfurtscheller, G.; Vaughan, T.M. Brain–computer interfaces for communication and control. Clin. Neurophysiol. 2002, 113, 767–791. [Google Scholar] [CrossRef]
- Kostov, A.; Polak, M. Parallel man-machine training in development of EEG-based cursor control. IEEE Trans. Rehabil. Eng. 2000, 8, 203–205. [Google Scholar] [CrossRef] [PubMed]
- Middendorf, M.; McMillan, G.; Calhoun, G.; Jones, K.S. Brain-computer interfaces based on the steady-state visual-evoked response. IEEE Trans. Rehabil. Eng. 2000, 8, 211–214. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vaughan, T.M.; McFarland, D.J.; Schalk, G.; Sarnacki, W.A.; Krusienski, D.J.; Sellers, E.W.; Wolpaw, J.R. The wadsworth BCI research and development program: At home with BCI. IEEE Trans. Neural Syst. Rehabil. Eng. 2006, 14, 229–233. [Google Scholar] [CrossRef] [PubMed]
- Odom, J.V.; Bach, M.; Barber, C.; Brigell, M.; Marmor, M.F.; Tormene, A.P.; Holder, G.E. Visual evoked potentials standard. Doc. Ophthalmol. 2004, 108, 115–123. [Google Scholar] [CrossRef]
- Birbaumer, N.; Kubler, A.; Ghanayim, N.; Hinterberger, T.; Perelmouter, J.; Kaiser, J.; Iversen, I.; Kotchoubey, B.; Neumann, N.; Flor, H. The thought translation device (TTD) for completely paralyzed patients. IEEE Trans. Rehabil. Eng. 2000, 8, 190–193. [Google Scholar] [CrossRef] [Green Version]
- Pfurtscheller, G.; Neuper, C.; Flotzinger, D.; Pregenzer, M. EEG-based discrimination between imagination of right and left hand movement. Electroencephalogr. Clin. Neurophysiol. 1997, 103, 642–651. [Google Scholar] [CrossRef]
- Donchin, E.; Spencer, K.M.; Wijesinghe, R. The mental prosthesis: Assessing the speed of a P300-based brain-computer interface. IEEE Trans. Rehabil. Eng. 2000, 8, 174–179. [Google Scholar] [CrossRef]
- Wolpaw, J.R.; Ramoser, H.; McFarland, D.J.; Pfurtscheller, G. EEG-based communication: Improved accuracy by response verification. IEEE Trans. Rehabil. Eng. 1998, 6, 326–333. [Google Scholar] [CrossRef]
- Vialatte, F.B.; Maurice, M.; Dauwels, J.; Cichocki, A. Steady-state visually evoked potentials: Focus on essential paradigms and future perspectives. Prog. Neurobiol. 2010, 90, 418–438. [Google Scholar] [CrossRef] [PubMed]
- Zhu, D.; Bieger, J.; Molina, G.G.; Aarts, R.M. A survey of stimulation methods used in SSVEP-based BCIs. Comput. Intell. Neurosci. 2010, 2010, 1. [Google Scholar] [CrossRef] [PubMed]
- Lopez-Gordo, M.A.; Prieto, A.; Pelayo, F.; Morillas, C. Customized stimulation enhances performance of independent binary SSVEP-BCIs. Clin. Neurophysiol. 2011, 122, 128–133. [Google Scholar] [CrossRef] [PubMed]
- Hillyard, S.A.; Hinrichs, H.; Tempelmann, C.; Morgan, S.T.; Hansen, J.C.; Scheich, H.; Heinze, H.J. Combining steady-state visual evoked potentials and f MRI to localize brain activity during selective attention. Hum. Brain Mapp. 1997, 5, 287–292. [Google Scholar] [CrossRef]
- Cheng, M.; Gao, X.; Gao, S.; Xu, D. Design and implementation of a brain-computer interface with high transfer rates. IEEE Trans. Biomed. Eng. 2002, 49, 1181–1186. [Google Scholar] [CrossRef]
- Muller-Putz, G.R.; Pfurtscheller, G. Control of an electrical prosthesis with an SSVEP-based BCI. IEEE Trans. Biomed. Eng. 2008, 55, 361–364. [Google Scholar] [CrossRef]
- Di Flumeri, G.; Aricò, P.; Borghini, G.; Sciaraffa, N.; Di Florio, A.; Babiloni, F. The Dry Revolution: Evaluation of Three Different EEG Dry Electrode Types in Terms of Signal Spectral Features, Mental States Classification and Usability. Sensors 2019, 19, 1635. [Google Scholar] [CrossRef]
- Wang, Y.; Pei, W.; Guo, K.; Gui, Q.; Li, X.; Chen, H.; Yang, J. Dry electrode for the measurement of biopotential signals. Sci. China Inf. Sci. 2011, 54, 2435. [Google Scholar] [CrossRef]
- Lin, J.S.; Wu, W.C. An FPGA-based BCI system with SSVEP and phased coding techniques. J. Technol. 2018, 33, 53–62. [Google Scholar]
- Trejo, L.J.; Rosipal, R.; Matthews, B. Brain-computer interfaces for 1-D and 2-D cursor control: Designs using volitional control of the EEG spectrum or steady-state visual evoked potentials. IEEE Trans. Neural Syst Rehabil. Eng. 2006, 14, 225–229. [Google Scholar] [CrossRef]
- Galloway, N.R. Human brain electrophysiology: Evoked potentials and evoked magnetic fields in science and medicine. Br. J. Ophthalmol. 1989, 74, 255. [Google Scholar] [CrossRef]
- Rundo, F.; Rinella, S.; Massimino, S.; Coco, M.; Fallica, G.; Parenti, R.; Conoci, S.; Perciavalle, V. An Innovative Deep Learning Algorithm for Drowsiness Detection from EEG Signal. Computation 2019, 7, 13. [Google Scholar] [CrossRef]
- Beckmann, L.; Neuhaus, C.; Medrano, G.; Jungbecker, N.; Walter, M.; Gries, T.; Leonhardt, S. Characterization of textile electrodes and conductors using standardized measurement setups. Physiol. Meas. 2010, 31, 233. [Google Scholar] [CrossRef] [PubMed]
- Cochran, W.T.; Cooley, J.W.; Favin, D.L.; Helms, H.D.; Kaenel, R.A.; Lang, W.W.; Maling, G.C.; Nelson, D.E.; Rader, C.M.; Welch, P.D. What is the fast Fourier transform? Proc. IEEE 1967, 55, 1664–1674. [Google Scholar] [CrossRef]
- Cooley, J.W.; Tukey, J.W. An algorithm for the machine calculation of complex Fourier series. Math. Comput. 1965, 19, 297–301. [Google Scholar] [CrossRef]
- Wu, Z.; Lai, Y.; Xia, Y.; Wu, D.; Yao, D. Stimulator selection in SSVEP-based BCI. Med. Eng. Phys. 2008, 30, 1079–1088. [Google Scholar] [CrossRef] [PubMed]
- Lo, C.C.; Chien, T.Y.; Chen, Y.C.; Tsai, S.H.; Fang, W.C.; Lin, B.S. A wearable channel selection-based brain-computer interface for motor imagery detection. Sensors 2016, 16, 213. [Google Scholar] [CrossRef]
- Gao, X.; Xu, D.; Cheng, M.; Gao, S. A BCI based environmental controller for the motion-disabled. IEEE Trans. Neural Syst. Rehabil. Eng. 2003, 11, 137–140. [Google Scholar]
- Yuan, P.; Gao, X.; Allison, B.; Wang, Y.; Bin, G.; Gao, S. A study of the existing problems of estimating the information transfer rate in online brain–computer interfaces. J. Neural Eng. 2013, 10, 026014. [Google Scholar] [CrossRef]
- Duan, F.; Lin, D.; Li, W.; Zhang, Z. Design of a multimodal EEG-based hybrid BCI system with visual servo module. IEEE Trans. Auton. Ment. Dev. 2015, 7, 332–341. [Google Scholar] [CrossRef]
- Wang, M.; Li, R.; Zhang, R.; Li, G.; Zhang, D. A Wearable SSVEP-Based BCI System for Quadcopter Control Using Head-Mounted Device. IEEE Access 2018, 6, 26789–26798. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lin et al. [18] | Feng et al. [30] | Wang et al. [31] | Proposed System | |
|---|---|---|---|---|
| Accuracy (%) | 95 | 89 | 83.3 | 92.5 |
| ITR (bits/min) | 14.58 | - | 4.6 | 36.08 |
| Wearable system | Yes | Yes | Yes | Yes |
| Wireless transmission | Bluetooth | Wifi | Bluetooth | Bluetooth |
| Encoding | Phase coding | Frequency coding | Frequency coding | Frequency coding |
| Number of EEG channels | 3 | 6 | 14 | 3 |
| Number of control commands | 4 | 5 | 4 | 12 |
| EEG sensor | Wet EEG electrode | Wet EEG electrodes | Saline-based electrodes | Novel dryelectrodes |
| Main computing unit | FPGA | Back-end computer | Back-end computer | FPGA |
| Stimulus device | LED | LCD | HMD | LCD |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, B.-S.; Lin, B.-S.; Yen, T.-H.; Hsu, C.-C.; Wang, Y.-C. Design of Wearable Headset with Steady State Visually Evoked Potential-Based Brain Computer Interface. Micromachines 2019, 10, 681. https://doi.org/10.3390/mi10100681
Lin B-S, Lin B-S, Yen T-H, Hsu C-C, Wang Y-C. Design of Wearable Headset with Steady State Visually Evoked Potential-Based Brain Computer Interface. Micromachines. 2019; 10(10):681. https://doi.org/10.3390/mi10100681
Chicago/Turabian StyleLin, Bor-Shyh, Bor-Shing Lin, Tzu-Hsiang Yen, Chien-Chin Hsu, and Yao-Chin Wang. 2019. "Design of Wearable Headset with Steady State Visually Evoked Potential-Based Brain Computer Interface" Micromachines 10, no. 10: 681. https://doi.org/10.3390/mi10100681