
Influence of System-Scale Change on Co-Alignment Comparative Accuracy in Fixed Terrestrial Photogrammetric Monitoring Systems



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
1.1. Co-Alignment and the MEMI Workflow
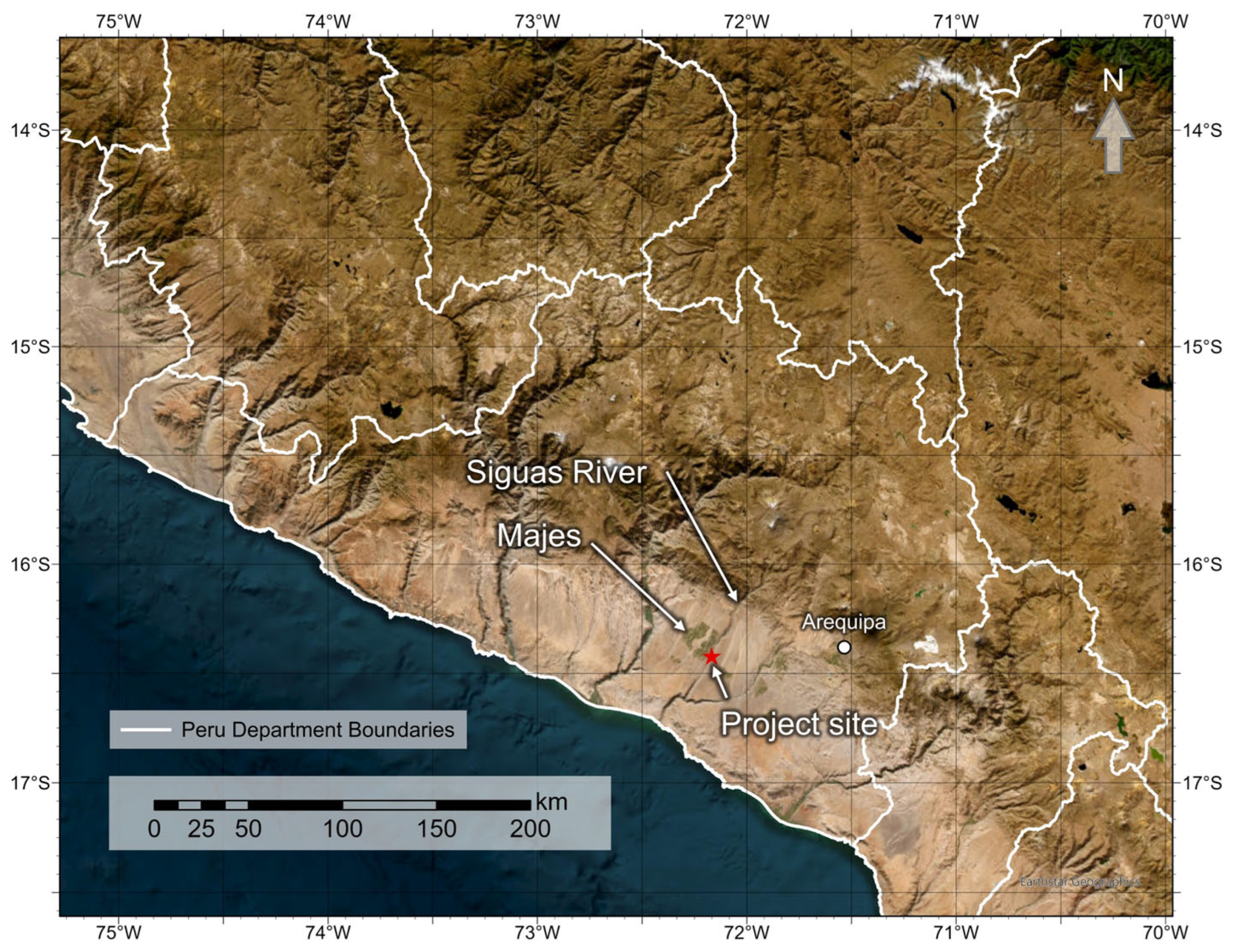
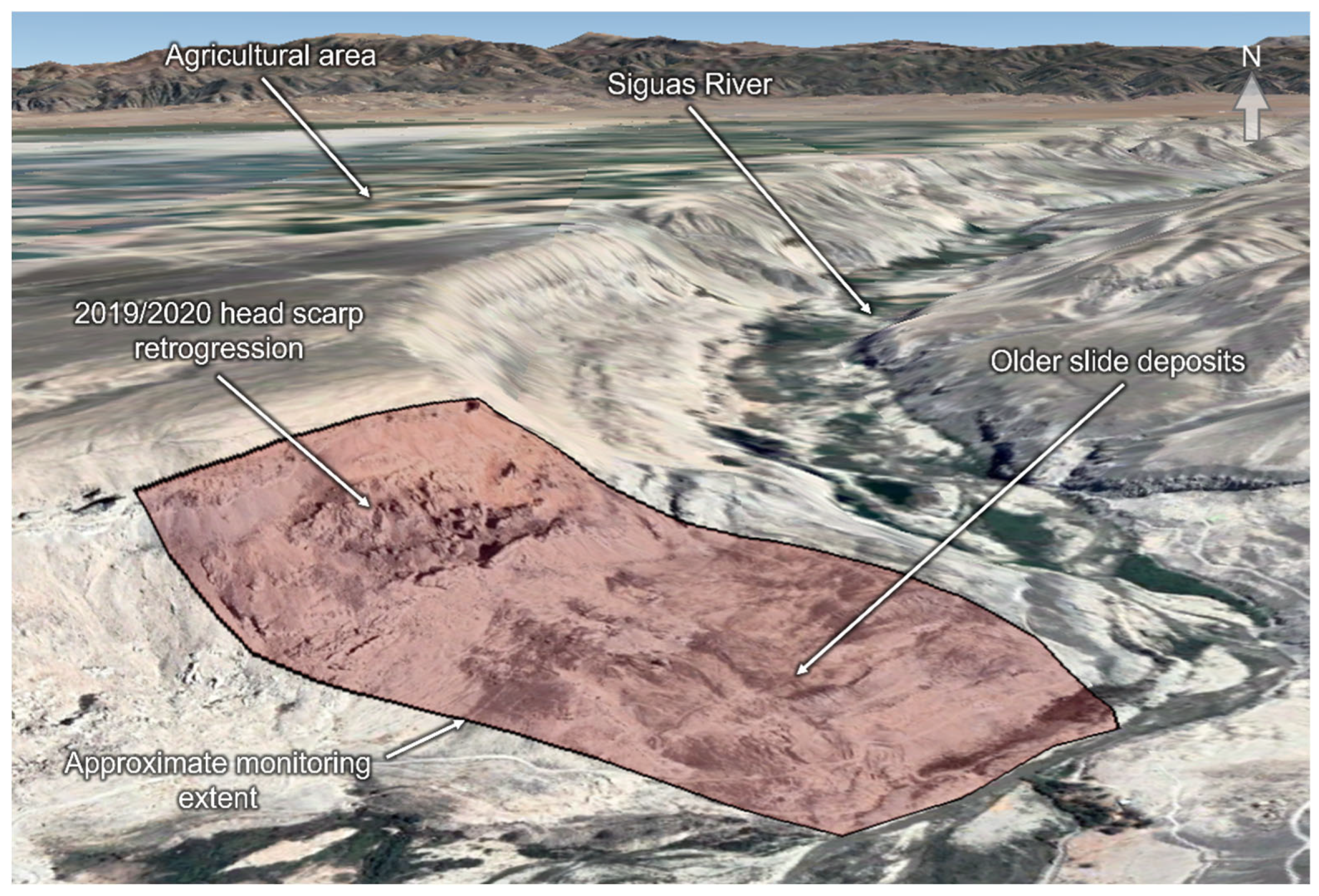
1.2. Geology and Site Description
2. Materials and Methods
2.1. Monitoring System
2.2. Data Collection
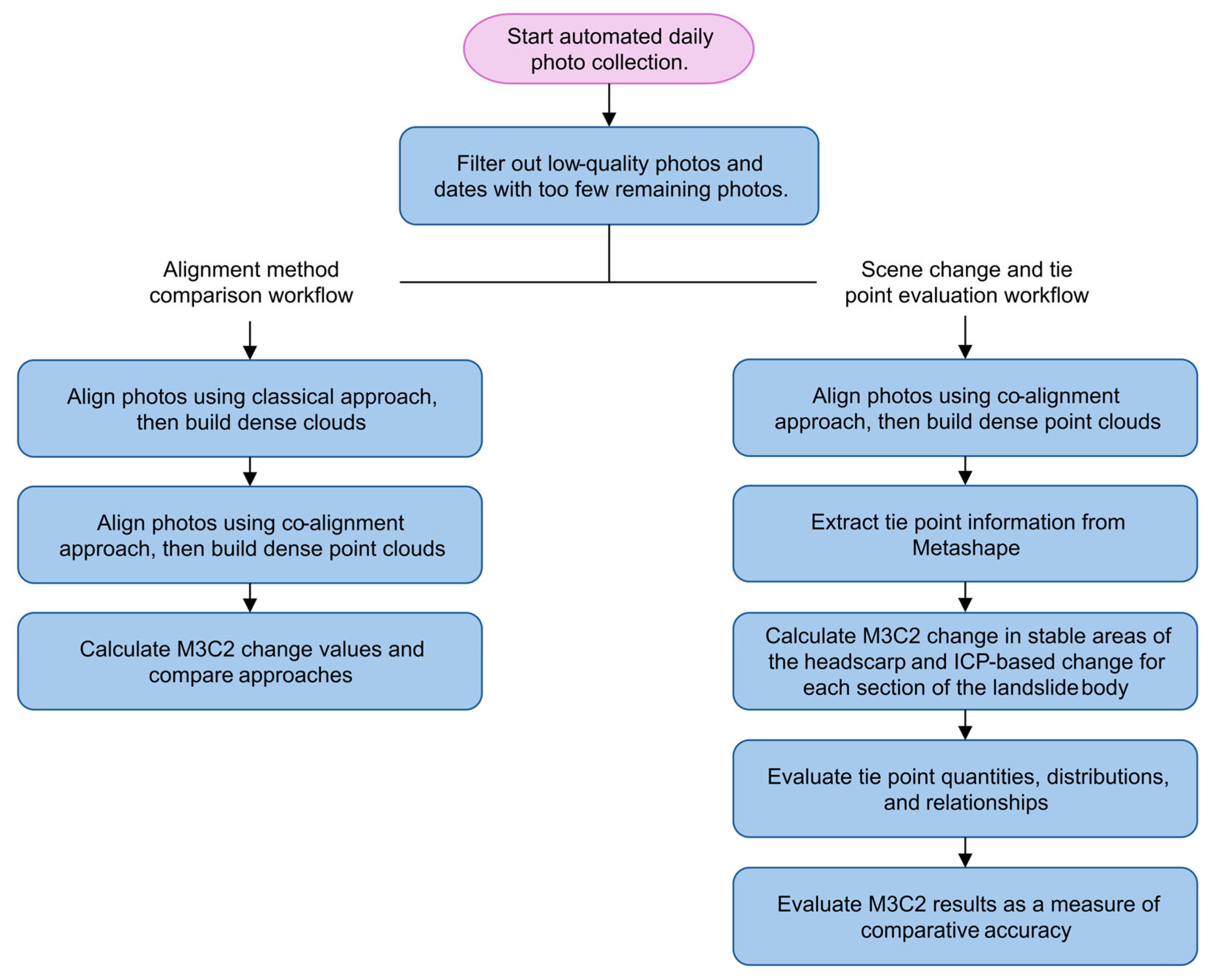
2.3. Model Generation Approach
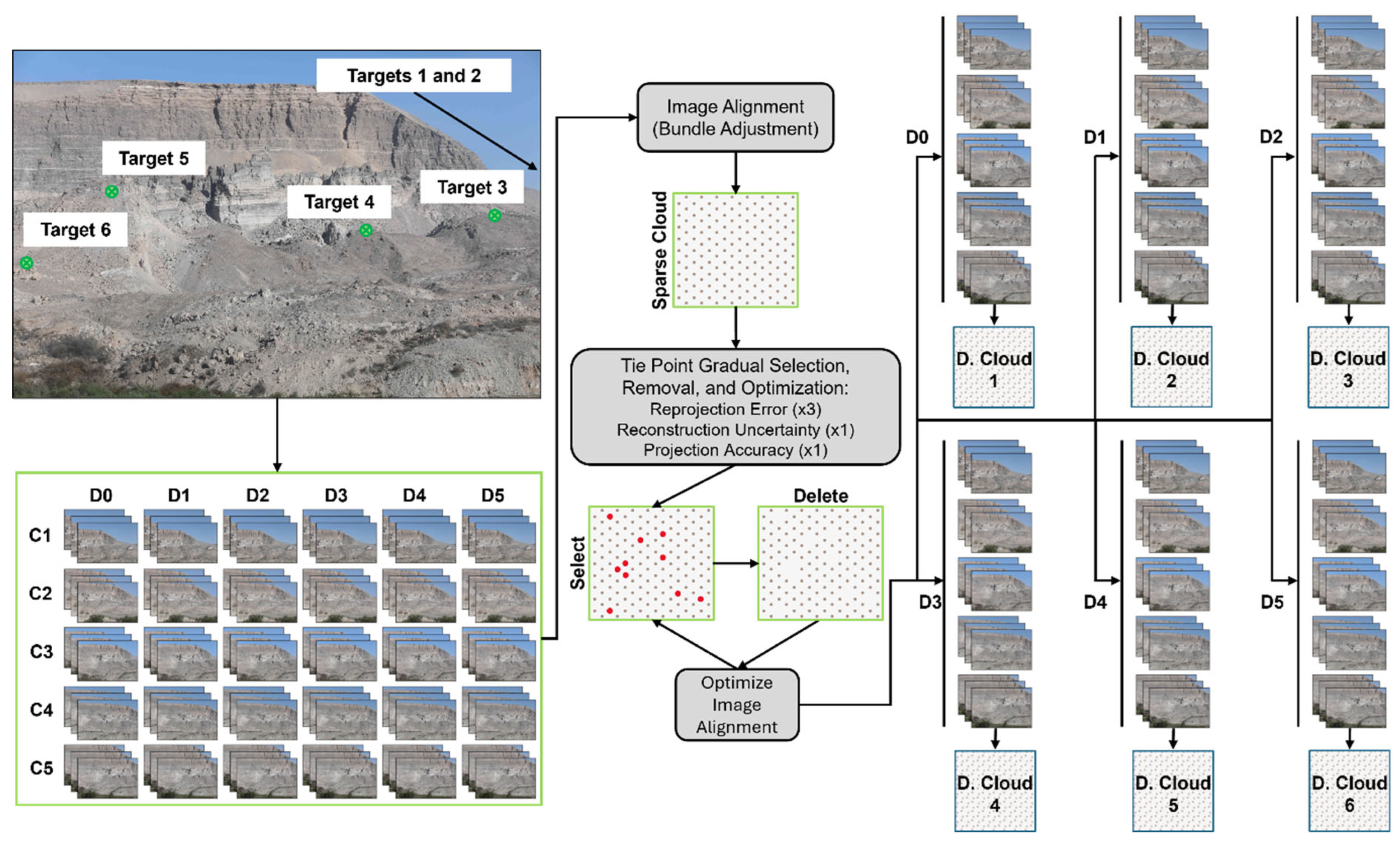
2.3.1. Co-Alignment Sets for Landslide Surface Displacement Monitoring
2.3.2. Classical Approach Comparison
2.4. Change Detection
2.5. Evaluation of Alignment Quality
2.6. Evaluation of Co-Alignment Tie Points
3. Results
3.1. Comparison of Classical Approach vs. Co-Alignment
3.2. Comparison Accuracy of Co-Aligned Point Clouds
3.3. Co-Alignment Tie Points
3.4. Evaluation of Slope Movement
4. Discussion
4.1. Co-Alignment and Large Scene Changes
4.2. Tie Point Behavior
4.3. Co-Alignment Limitations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gabrieli, F.; Corain, L.; Vettore, L. A low-cost landslide displacement activity assessment from time-lapse photogrammetry and rainfall data: Application to the Tessina landslide site. Geomorphology 2016, 269, 56–74. [Google Scholar] [CrossRef]
- Roncella, R.; Forlani, G.; Fornari, M.; Diotri, F. Landslide monitoring by fixed-base terrestrial stereo-photogrammetry. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 2, 297–304. [Google Scholar] [CrossRef]
- Stumpf, A.; Malet, J.P.; Allemand, P.; Pierrot-Deseilligny, M.; Skupinski, G. Ground-based multi-view photogrammetry for the monitoring of landslide deformation and erosion. Geomorphology 2015, 231, 130–145. [Google Scholar] [CrossRef]
- Kromer, R.; Walton, G.; Gray, B.; Lato, M.; Group, R. Development and optimization of an automated fixed-location time lapse photogrammetric rock slope monitoring system. Remote Sens. 2019, 11, 1890. [Google Scholar] [CrossRef]
- Núñez-Andrés, M.A.; Prades-Valls, A.; Matas, G.; Buill, F.; Lantada, N. New Approach for Photogrammetric Rock Slope Premonitory Movements Monitoring. Remote Sens. 2023, 15, 293. [Google Scholar] [CrossRef]
- Blanch, X.; Guinau, M.; Eltner, A.; Abellan, A. A cost-effective image-based system for 3D geomorphic monitoring: An application to rockfalls. Geomorphology 2024, 449, 109065. [Google Scholar] [CrossRef]
- Vanneschi, C.; Di Camillo, M.; Aiello, E.; Bonciani, F.; Salvini, R. SFM-MVS photogrammetry for rockfall analysis and hazard assessment along the ancient roman via Flaminia road at the Furlo gorge (Italy). ISPRS Int. J. Geoinf. 2019, 8, 325. [Google Scholar] [CrossRef]
- Zanutta, A.; Lambertini, A.; Vittuari, L. UAV photogrammetry and ground surveys as a mapping tool for quickly monitoring shoreline and beach changes. J. Mar. Sci. Eng. 2020, 8, 52. [Google Scholar] [CrossRef]
- Over, J.-S.R.; Ritchie, A.C.; Kranenburg, C.J.; Brown, J.A.; Buscombe, D.D.; Noble, T.; Sherwood, C.R.; Warrick, J.A.; Wernette, P.A. Processing Coastal Imagery with Agisoft Metashape Professional Edition, Version 1.6—Structure from Motion Workflow Documentation; U.S. Geological Survey: Reston, VA, USA, 2021. [Google Scholar] [CrossRef]
- Piton, G.; Recking, A.; Le Coz, J.; Bellot, H.; Hauet, A.; Jodeau, M. Reconstructing Depth-Averaged Open-Channel Flows Using Image Velocimetry and Photogrammetry. Water Resour. Res. 2018, 54, 4164–4179. [Google Scholar] [CrossRef]
- Tunwal, M.; Lim, A. A Low-Cost, Repeatable Method for 3D Particle Analysis with SfM Photogrammetry. Geosciences 2023, 13, 190. [Google Scholar] [CrossRef]
- Ioli, F.; Dematteis, N.; Giordan, D.; Nex, F.; Pinto, L. Deep Learning Low-cost Photogrammetry for 4D Short-term Glacier Dynamics Monitoring. PFG J. Photogramm. Remote Sens. Geoinf. Sci. 2024, 92, 657–678. [Google Scholar] [CrossRef]
- Burdziakowski, P.; Bobkowska, K. Uav photogrammetry under poor lighting conditions—Accuracy considerations. Sensors 2021, 21, 3531. [Google Scholar] [CrossRef] [PubMed]
- Meng, X.; Shang, N.; Zhang, X.; Li, C.; Zhao, K.; Qiu, X.; Weeks, E. Photogrammetric UAV mapping of terrain under dense coastal vegetation: An object-oriented classification ensemble algorithm for classification and terrain correction. Remote Sens. 2017, 9, 1187. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S.; Smith, M.W. 3-D uncertainty-based topographic change detection with structure-from-motion photogrammetry: Precision maps for ground control and directly georeferenced surveys. Earth Surf. Process. Landf. 2017, 42, 1769–1788. [Google Scholar] [CrossRef]
- Peppa, M.V.; Mills, J.P.; Moore, P.; Miller, P.E.; Chambers, J.E. Automated co-registration and calibration in SfM photogrammetry for landslide change detection. Earth Surf. Process. Landf. 2019, 44, 287–303. [Google Scholar] [CrossRef]
- Blanch, X.; Eltner, A.; Guinau, M.; Abellan, A. Multi-Epoch and Multi-Imagery (MEMI) Photogrammetric Workflow for Enhanced Change Detection Using Time-Lapse Cameras. Remote Sens. 2021, 13, 1460. [Google Scholar] [CrossRef]
- Feurer, D.; Vinatier, F. Joining multi-epoch archival aerial images in a single SfM block allows 3-D change detection with almost exclusively image information. ISPRS J. Photogramm. Remote Sens. 2018, 146, 495–506. [Google Scholar] [CrossRef]
- Cook, K.L.; Dietze, M. Short Communication: A simple workflow for robust low-cost UAV-derived change detection without ground control points. Earth Surf. Dyn. 2019, 7, 1009–1017. [Google Scholar] [CrossRef]
- de Haas, T.; Nijland, W.; McArdell, B.W.; Kalthof, M.W.M.L. Case Report: Optimization of Topographic Change Detection With UAV Structure-From-Motion Photogrammetry Through Survey Co-Alignment. Front. Remote Sens. 2021, 2, 626810. [Google Scholar] [CrossRef]
- Araujo, G.; Taipe, E.; Miranda, R.; Valderrama, P. Dinamica y Monitoreo Del Deslizamiento De Siguas. Arequipa. 2017. Available online: https://sigrid.cenepred.gob.pe/sigridv3/documento/4562 (accessed on 20 January 2022).
- Wei, X.; Garcia-Chevesich, P.; Alejo, F.; Garcia, V.; Martinez, G.; Daneshvar, F.; Bowling, L.C.; Gonzáles, E.; Krahenbuhl, R.; McCray, J.E. Hydrologic analysis of an intensively irrigated area in southern peru using a crop-field scale framework. Water 2021, 13, 318. [Google Scholar] [CrossRef]
- Graber, A.; Santi, P.; Arestegui, P.M. Constraining the critical groundwater conditions for initiation of large, irrigation-induced landslides, Siguas River Valley, Peru. Landslides 2021, 18, 3753–3767. [Google Scholar] [CrossRef]
- Flamme, H.E.; Krahenbuhl, R.A.; Li, Y.; Dugan, B.; Shragge, J.; Graber, A.; Sirota, D.; Wilson, G.; Gonzales, E.; Ticona, J.; et al. Integrated geophysical investigation for understanding agriculturally induced landslides in southern Peru. Environ. Earth Sci. 2022, 81, 309. [Google Scholar] [CrossRef]
- Lacroix, P.; Dehecq, A.; Taipe, E. Irrigation-triggered landslides in a Peruvian desert caused by modern intensive farming. Nat. Geosci. 2020, 13, 56–60. [Google Scholar] [CrossRef]
- El Servicio Nacional de Meteorología e Hidrología del Perú. Climate Map of Peru. Peru Ministerio del Ambiente. Available online: https://www.senamhi.gob.pe/main.php?dp=arequipa&p=mapa-climatico-del-peru (accessed on 23 April 2025).
- Butcher, B. Rockslope and Landslide Monitoring Using High Temporal Resolution Terrestrial Structure from Motion Photogrammetry: A Case Study of a Landslide in Majes Zone, Peru Using Multi-Epoch Photogrammetric Techniques. Master’s Thesis, Colorado School of Mines, Golden, CO, USA, 2023. [Google Scholar]
- Team, P. Planet Application Program Interface: In Space for Life on Earth. Available online: https://api.planet.com (accessed on 5 July 2022).
- Butcher, B.; Walton, G.; Kromer, R.; Gonzales, E.; Ticona, J.; Minaya, A. High-Temporal-Resolution Rock Slope Monitoring Using Terrestrial Structure-from-Motion Photogrammetry in an Application with Spatial Resolution Limitations. Remote Sens. 2024, 16, 66. [Google Scholar] [CrossRef]
- Pro, G.E. 2D Imagery over 3D Terrain of the Siguas River Valley, Majes, Peru. Google. 2025. Available online: https://earth.google.com/web/search/majes+peru/@-16.41965294,-72.16868181,1181.46828755a,1833.14655695d,35y,9.25823762h,78.1453204t,0r/data=CiwiJgokCcTSCN88GURAEbb2AQWUFkRAGcq6KS5EVFrAIe1QprGOVlrAQgIIAToDCgEwQgIIAEoNCP___________wEQAA (accessed on 22 November 2024).
- Giacomini, A.; Thoeni, K.; Santise, M.; Diotri, F.; Booth, S.; Fityus, S.; Roncella, R. Temporal-spatial frequency rockfall data from open-pit highwalls using a low-cost monitoring system. Remote Sens. 2020, 12, 2459. [Google Scholar] [CrossRef]
- Harbortronics Cyclapse Time Lapse Camera System 2018. Available online: https://cyclapse.com (accessed on 11 March 2023).
- Rao, K.; Ahmed, N.; Natarajan, T. Discrete Cosine Transfom. IEEE Trans. Comput. 1974, 23, 90–93. [Google Scholar] [CrossRef]
- Agisoft Metashape Professional Edition. 2022, 1.6.6 and 1.8.3. Available online: http://www.agisoft.com/downloads/installer (accessed on 13 June 2022).
- Team, P.C. Python: A Dynamic, Open Source Programming Language, Version 3.9; Python Software Foundation: Wilmington, DA, USA, 2022; Available online: https://www.python.org/ (accessed on 17 January 2022).
- Besl, P.J.; McKay, N.D. A method for registration of 3-D shapes. IEEE Trans Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Lague, D.; Brodu, N.; Leroux, J. Accurate 3D comparison of complex topography with terrestrial laser scanner: Application to the Rangitikei canyon (N-Z). ISPRS J. Photogramm. Remote Sens. 2013, 82, 10–26. [Google Scholar] [CrossRef]
- Li, X.; Ding, M.; Li, Z.; Cui, P. Common-feature-track-matching approach for multi-epoch UAV photogrammetry co-registration. ISPRS J. Photogramm. Remote Sens. 2024, 218, 392–407. [Google Scholar] [CrossRef]
- Parente, L.; Chandler, J.H.; Dixon, N. Automated Registration of SfM-MVS Multitemporal Datasets Using Terrestrial and Oblique Aerial Images. Photogramm. Rec. 2021, 36, 12–35. [Google Scholar] [CrossRef]
- Battulwar, R.; Emami, E.; Zare, M.; Battulwar, K.; Shahsavar, M.; Moniri-Morad, A.; Sattarvand, J. Utilizing Deep Learning for the Automated Extraction of Rock Mass Features from Point Clouds. Geotech. Geol. Eng. 2024, 42, 6179–6194. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Butcher, B.; Walton, G.; Kromer, R.; Gonzales, E. Influence of System-Scale Change on Co-Alignment Comparative Accuracy in Fixed Terrestrial Photogrammetric Monitoring Systems. Remote Sens. 2025, 17, 2200. https://doi.org/10.3390/rs17132200
Butcher B, Walton G, Kromer R, Gonzales E. Influence of System-Scale Change on Co-Alignment Comparative Accuracy in Fixed Terrestrial Photogrammetric Monitoring Systems. Remote Sensing. 2025; 17(13):2200. https://doi.org/10.3390/rs17132200
Chicago/Turabian StyleButcher, Bradford, Gabriel Walton, Ryan Kromer, and Edgard Gonzales. 2025. "Influence of System-Scale Change on Co-Alignment Comparative Accuracy in Fixed Terrestrial Photogrammetric Monitoring Systems" Remote Sensing 17, no. 13: 2200. https://doi.org/10.3390/rs17132200
APA StyleButcher, B., Walton, G., Kromer, R., & Gonzales, E. (2025). Influence of System-Scale Change on Co-Alignment Comparative Accuracy in Fixed Terrestrial Photogrammetric Monitoring Systems. Remote Sensing, 17(13), 2200. https://doi.org/10.3390/rs17132200