
Multi-Information-Assisted Joint Detection and Tracking of Ground Moving Target for Airborne Radar



Abstract
1. Introduction
2. Materials and Methods
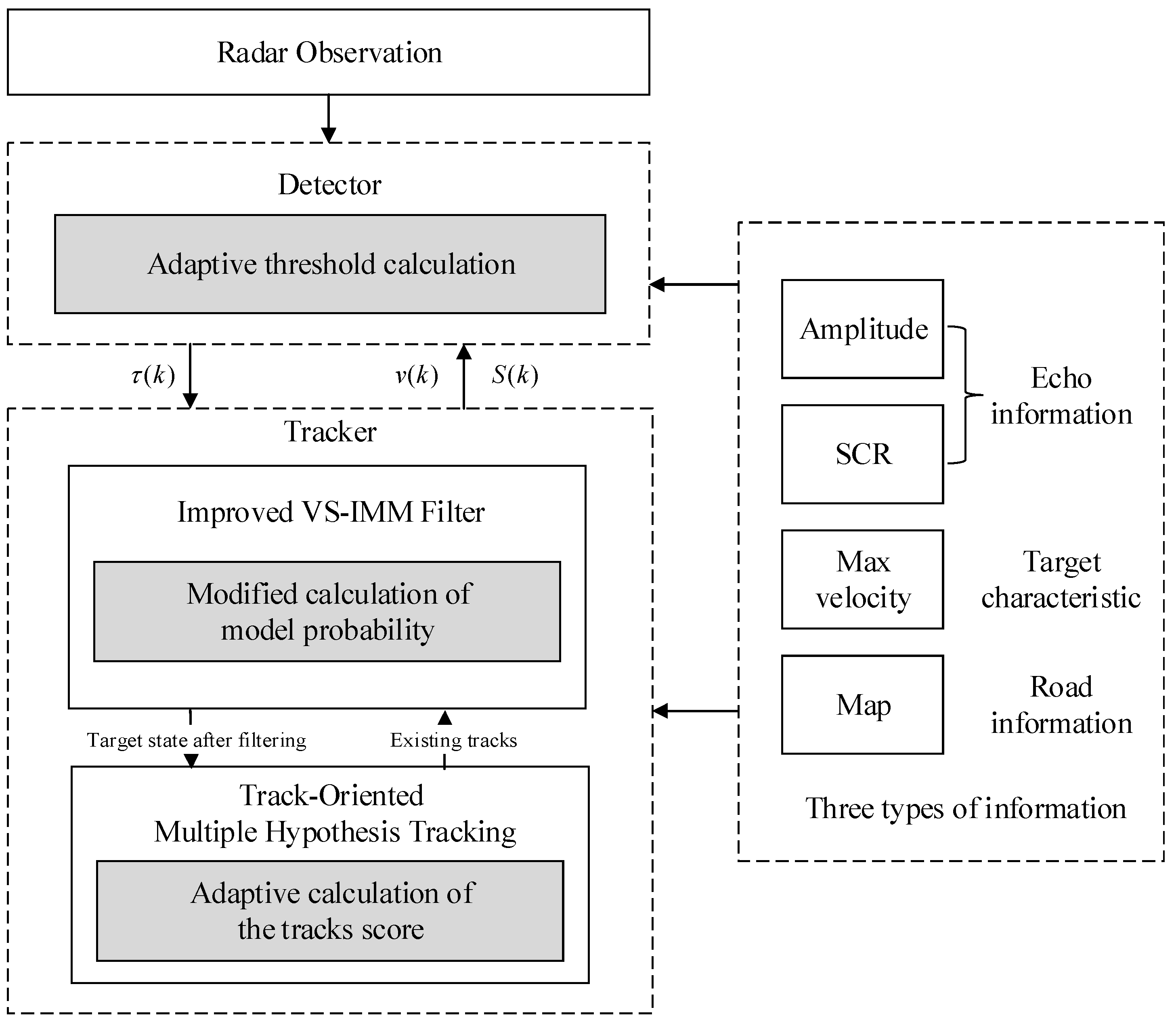
2.1. Joint Detection and Tracking Model
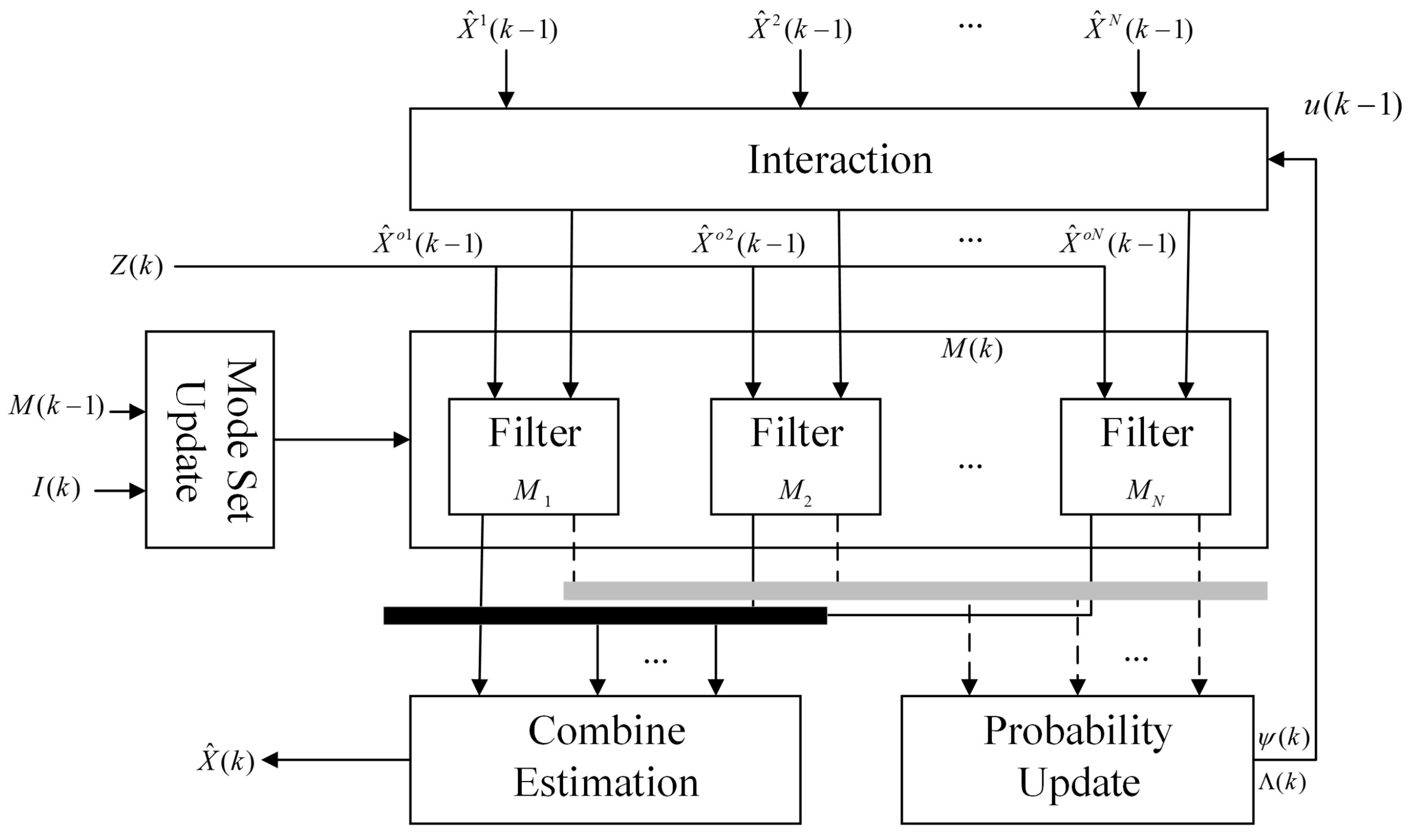
2.2. Improved VS-IMM Filter
| Algorithm 1 Improved VS-IMM Filter Algorithm |
|
2.3. Track-Oriented Multiple Hypothesis Tracking
2.3.1. Association Gate
2.3.2. Adaptive Track Score
2.3.3. Sequential Probability Ratio Test
2.3.4. Overall Process
3. Results
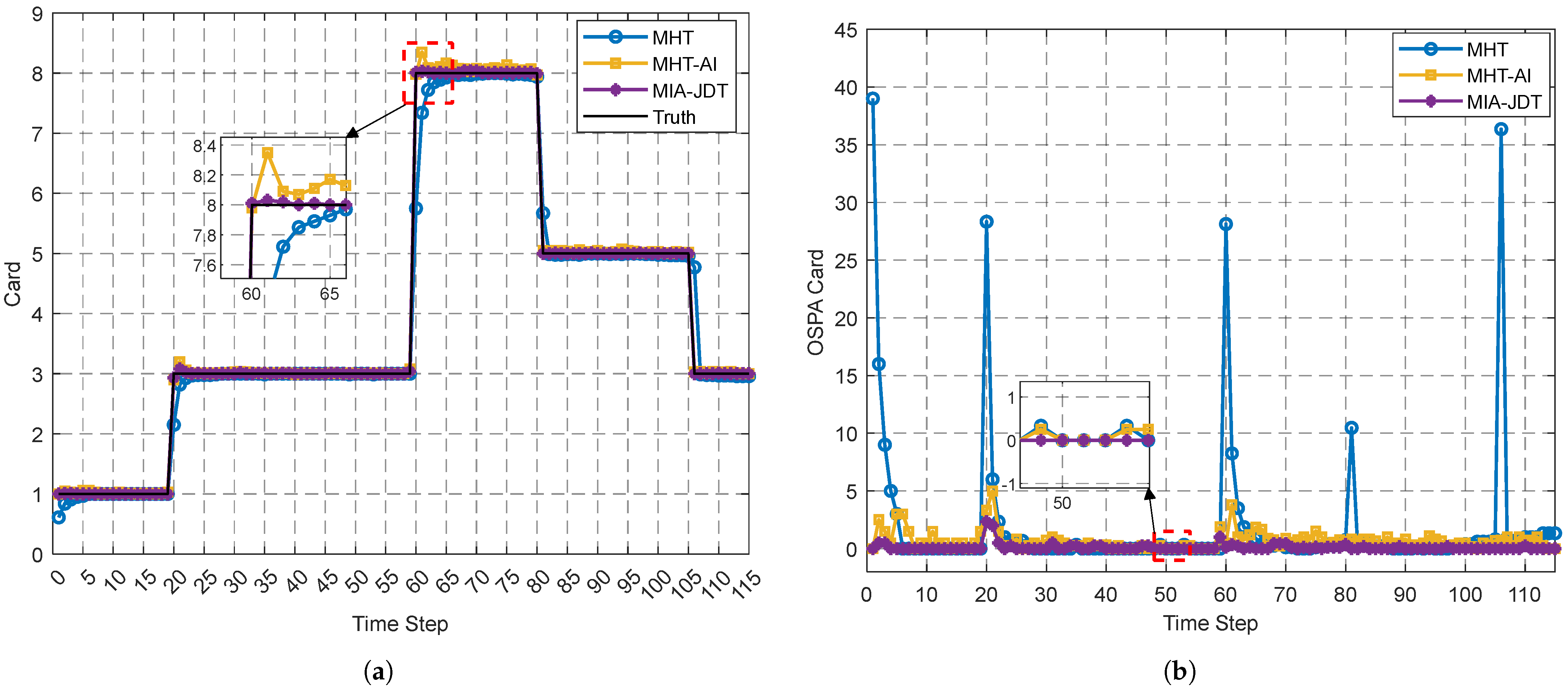
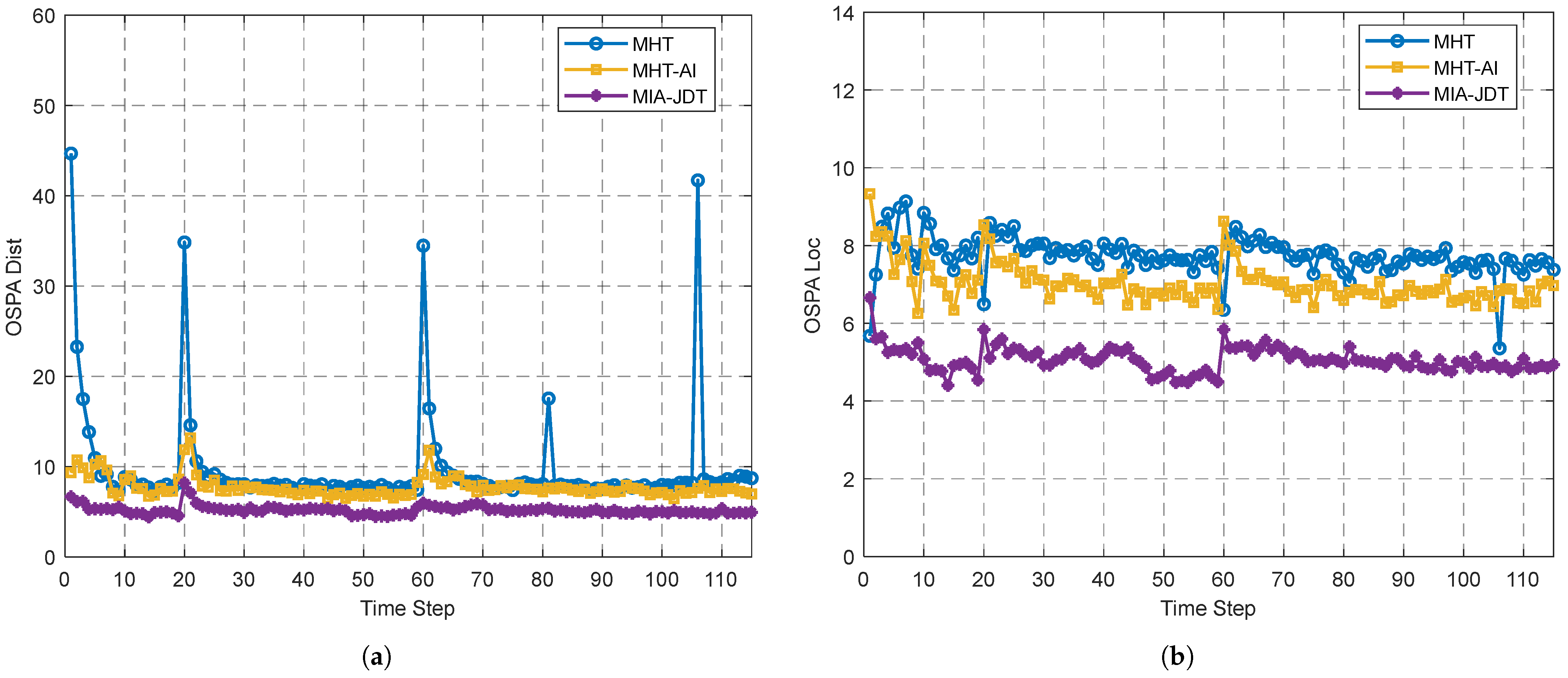
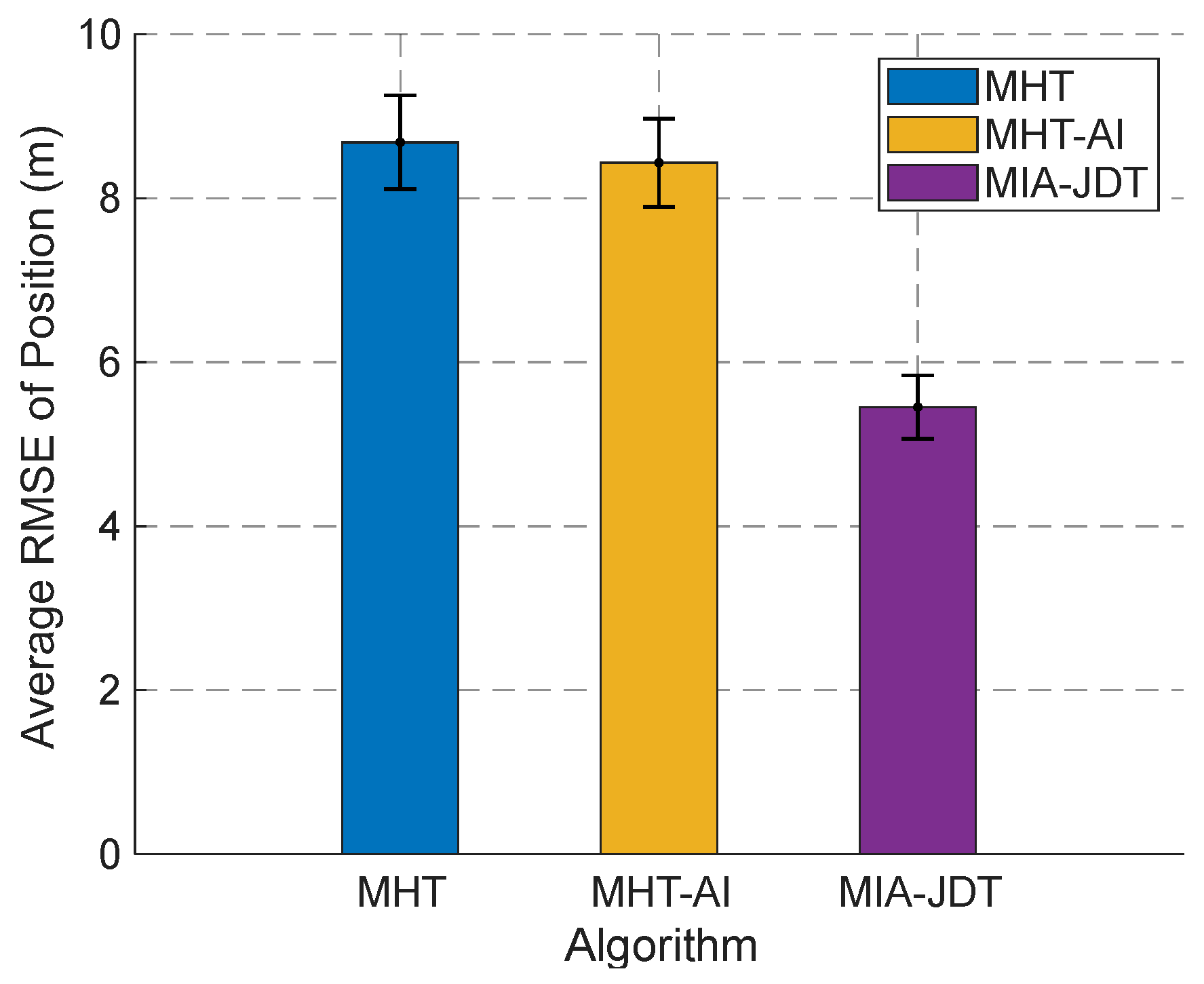
3.1. Comparison of Different Algorithms Under Varying Clutter Densities
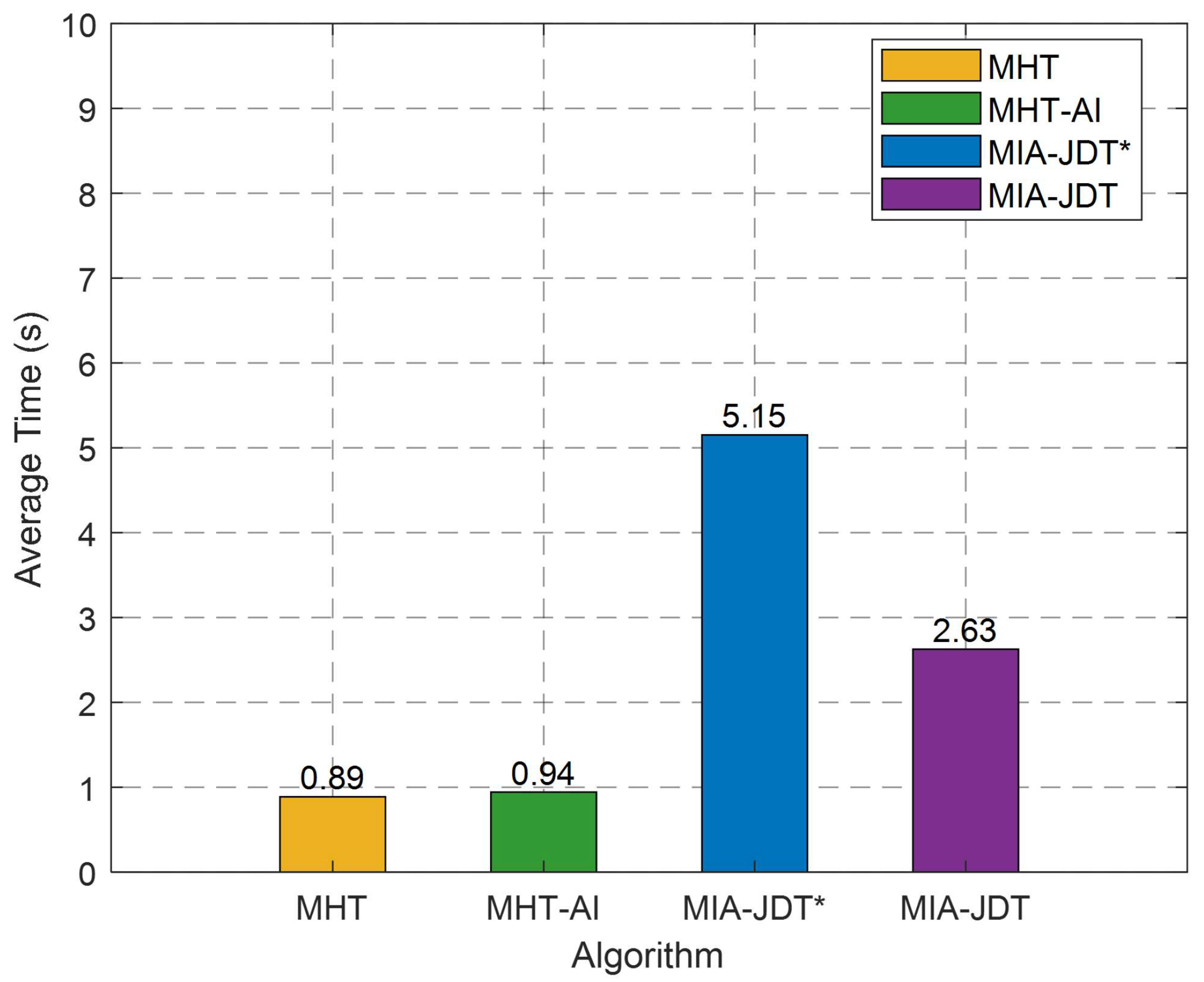
3.2. Comparison of Computation Time
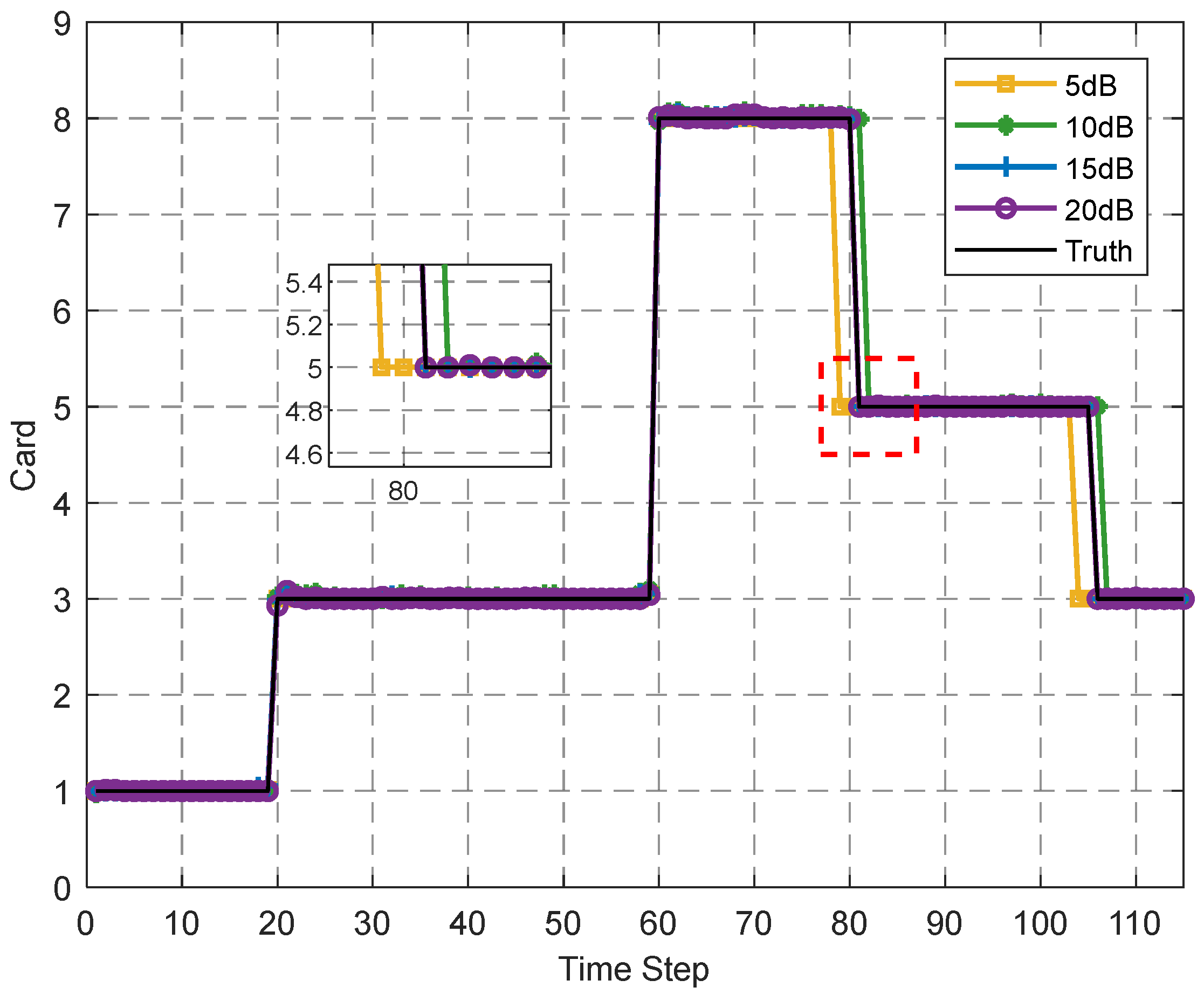
3.3. SCR Sensitivity Analysis
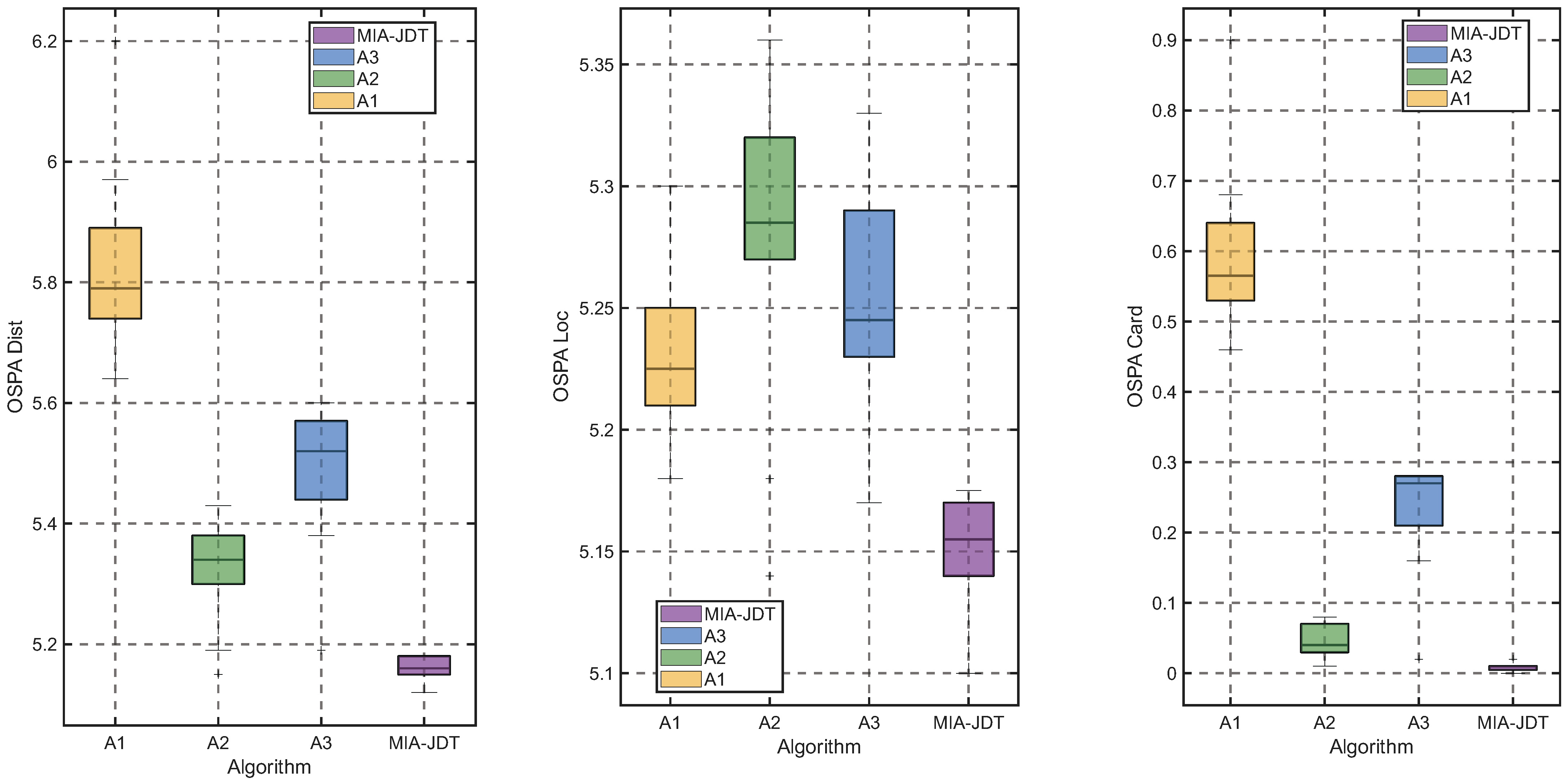
3.4. Ablation Study
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, J.; Ren, L. Analysis of STAP on MDV for Spaceborne SAR-GMTI Applications. In Proceedings of the 2006 CIE International Conference on Radar, Shanghai, China, 16–19 October 2006; pp. 1–3. [Google Scholar] [CrossRef]
- Middleton, D.; Esposito, R. Simultaneous optimum detection and estimation of signals in noise. IEEE Trans. Inf. Theory 1968, 14, 434–444. [Google Scholar] [CrossRef]
- Fortmann, T.; Bar-Shalom, Y.; Scheffe, M.; Gelfand, S. Detection thresholds for tracking in clutter—A connection between estimation and signal processing. IEEE Trans. Autom. Control 1985, 30, 221–229. [Google Scholar] [CrossRef]
- Aslan, M.S.; Saranli, A. Threshold Optimization for Tracking a Nonmaneuvering Target. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2844–2859. [Google Scholar] [CrossRef]
- Şamil Aslan, M.; Saranlı, A. A tracker-aware detector threshold optimization formulation for tracking maneuvering targets in clutter. Signal Process. 2011, 91, 2213–2221. [Google Scholar] [CrossRef]
- Willett, P.; Niu, R.; Bar-Shalom, Y. Integration of Bayes detection with target tracking. IEEE Trans. Signal Process. 2001, 49, 17–29. [Google Scholar] [CrossRef]
- Zeng, T.; Zheng, L.; Li, Y.; Chen, X.; Long, T. Offline Performance Prediction of PDAF with Bayesian Detection for Tracking in Clutter. IEEE Trans. Signal Process. 2013, 61, 770–781. [Google Scholar] [CrossRef]
- Yun-q, W. Integration of Detection with JPDAF for Multi-Target Tracking. Radar Sci. Technol. 2014. Available online: https://api.semanticscholar.org/CorpusID:113145732 (accessed on 18 April 2025).
- Wang, Z.; Sun, J.; Li, Q.; Ding, G. A New Multiple Hypothesis Tracker Integrated with Detection Processing. Sensors 2019, 19, 5278. [Google Scholar] [CrossRef]
- Li, X.; Sun, W.; Ji, Y.; Dai, Y.; Huang, W. Joint Detection and Tracking for Compact HFSWR. In Proceedings of the OCEANS 2023—Limerick, Limerick, Ireland, 5–8 June 2023; pp. 1–4. [Google Scholar] [CrossRef]
- Li, X.; Sun, W.; Ji, Y.; Huang, W. A Joint Detection and Tracking Paradigm Based on Reinforcement Learning for Compact HFSWR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2025, 18, 1995–2009. [Google Scholar] [CrossRef]
- Feichtenhofer, C.; Pinz, A.; Zisserman, A. Detect to track and track to detect. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 3057–3065. [Google Scholar] [CrossRef]
- Bergmann, P.; Meinhardt, T.; Leal-Taixe, L. Tracking without bells and whistles. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 941–951. [Google Scholar] [CrossRef]
- Huang, P.; Han, S.; Zhao, J.; Liu, D.; Wang, H.; Yu, E.; Kot, A.C. Refinements in motion and appearance for online multi-object tracking. arXiv 2020, arXiv:2003.07177. [Google Scholar] [CrossRef]
- Zhou, X.; Koltun, V.; Krähenbühl, P. Tracking objects as points. In Computer Vision—ECCV 2020; Springer: Cham, Switzerland, 2020; pp. 474–490. [Google Scholar] [CrossRef]
- Luo, C.; Yang, X.; Yuille, A. Exploring simple 3d multi-object tracking for autonomous driving. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, QC, Canada, 10–17 October 2021; pp. 10468–10477. [Google Scholar] [CrossRef]
- Sun, J.; Ji, Y.M.; He, J.; Wu, F.; Sun, Y. Offset3Net: Simple Joint 3-D Detection and Tracking With Three-Step Offset Learning. IEEE Trans. Industr. Inform. 2024, 20, 2284–2294. [Google Scholar] [CrossRef]
- Lerro, D.; Bar-Shalom, Y. Automated Tracking with Target Amplitude Information. In Proceedings of the 1990 American Control Conference, San Diego, CA, USA, 23–25 May 1990; pp. 2875–2880. [Google Scholar] [CrossRef]
- Kirubarajan, T.; Bar-Shalom, Y. Low observable target motion analysis using amplitude information. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 1367–1384. [Google Scholar] [CrossRef]
- Lerro, D.; Bar-Shalom, Y. Interacting multiple model tracking with target amplitude feature. IEEE Trans. Aerosp. Electron. Syst. 1993, 29, 494–509. [Google Scholar] [CrossRef]
- Brekke, E.; Hallingstad, O.; Glattetre, J. The Modified Riccati Equation for Amplitude-Aided Target Tracking in Heavy-Tailed Clutter. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2874–2886. [Google Scholar] [CrossRef]
- Drummond, O.E. Feature, attribute, and classification aided target tracking. In Proceedings of the Signal and Data Processing of Small Targets 2001; Drummond, O.E., Ed.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 2001; Volume 4473, pp. 542–558. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Kirubarajan, T.; Gokberk, C. Tracking with classification-aided multiframe data association. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 868–878. [Google Scholar] [CrossRef]
- Wang, X.; Musicki, D.; Ellem, R.; Fletcher, F. Enhanced Multi-Target Tracking with Doppler Measurements. In Proceedings of the 2007 Information, Decision and Control, Adelaide, SA, Australia, 12–14 February 2007; pp. 53–58. [Google Scholar] [CrossRef]
- Capraro, C.T.; Capraro, G.T.; Wicks, M.C. Knowledge Aided Detection and Tracking. In Proceedings of the 2007 IEEE Radar Conference, Waltham, MA, USA, 17–20 April 2007; pp. 352–356. [Google Scholar] [CrossRef]
- Kirubarajan, T.; Bar-Shalom, Y.; Pattipati, K.; Kadar, I. Ground target tracking with variable structure IMM estimator. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 26–46. [Google Scholar] [CrossRef]
- Chai, J.; He, S.; Shin, H.S.; Tsourdos, A. Domain-knowledge-aided airborne ground moving targets tracking. Aerosp. Sci. Technol. 2024, 144, 108807. [Google Scholar] [CrossRef]
- Yang, C.; Cao, X.; Shi, Z. Road-Map Aided Gaussian Mixture Labeled Multi-Bernoulli Filter for Ground Multi- Target Tracking. IEEE Trans. Veh. Technol. 2023, 72, 7137–7147. [Google Scholar] [CrossRef]
- Vivone, G.; Braca, P.; Horstmann, J. Knowledge-Based Multi-Target Ship Tracking for HF Surface Wave Radar Systems. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3931–3949. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Li, X.R. Multitarget-Multisensor Tracking: Principles and Techniques. IEEE Control Syst. Mag. 1996, 16, 93. [Google Scholar] [CrossRef]
- Li, X.R.; Bar-Shalom, Y. Multiple-model estimation with variable structure. IEEE Trans. Autom. Control 1996, 41, 478–493. [Google Scholar] [CrossRef]
- Kosuge, Y.; Kojima, M.; Tsujimichi, S. Multiple manoeuvre model track-oriented MHT (multiple hypothesis tracking). In Proceedings of the 38th SICE Annual Conference. International Session Papers (IEEE Cat. No.99TH8456), SICE ’99, Morioka, Japan, 30–30 July 1999; pp. 1129–1134. [Google Scholar] [CrossRef]
- Reid, D. An algorithm for tracking multiple targets. IEEE Trans. Autom. Control 1979, 24, 843–854. [Google Scholar] [CrossRef]
- Wang, H.; Kirubarajan, T.; Bar-Shalom, Y. Precision large scale air traffic surveillance using IMM/assignment estimators. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 255–266. [Google Scholar] [CrossRef]
- Blackman, S.; Popoli, R. Design and Analysis of Modern Tracking Systems; Artech House Radar Library; Artech House: Norwood, MA, USA, 1999; Available online: https://www.academia.edu/1102030/Design_and_Analysis_of_Modern_Tracking_Systems (accessed on 18 April 2025).
- Bar-Shalom, Y.; Blackman, S.S.; Fitzgerald, R.J. Dimensionless score function for multiple hypothesis tracking. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 392–400. [Google Scholar] [CrossRef]
- Ristic, B.; Vo, B.N.; Clark, D.; Vo, B.T. A Metric for Performance Evaluation of Multi-Target Tracking Algorithms. IEEE Trans. Signal Process. 2011, 59, 3452–3457. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Target Number | Initial State | Survival Time |
|---|---|---|
| T1 | 1–80 | |
| T2 | 20–80 | |
| T3 | 20–80 | |
| T4 | 60–105 | |
| T5 | 60–105 | |
| T6 | 60–115 | |
| T7 | 60–115 | |
| T8 | 60–115 |
| Algorithm | OSPA Dist | OSPA Loc | OSPA Card | Time per Step | |
|---|---|---|---|---|---|
| MHT | 8.77 | 7.30 | 1.47 | 0.003 | |
| MHT-AI | 7.00 | 6.52 | 0.47 | 0.004 | |
| MIA-JDT | 5.12 | 5.03 | 0.09 | 0.008 | |
| MHT | 9.67 | 7.74 | 1.94 | 0.008 | |
| MHT-AI | 7.73 | 7.03 | 0.70 | 0.008 | |
| MIA-JDT | 5.18 | 5.07 | 0.11 | 0.023 | |
| MHT | 10.22 | 7.81 | 2.41 | 0.054 | |
| MHT-AI | 8.12 | 7.11 | 1.01 | 0.118 | |
| MIA-JDT | 5.67 | 5.42 | 0.25 | 0.211 |
| SCR (dB) | ||||
|---|---|---|---|---|
| 5 | 10 | 15 | 20 | |
| OSPA Dist | 6.62 | 6.29 | 5.54 | 5.18 |
| OSPA Loc | 5.25 | 5.33 | 5.37 | 5.07 |
| OSPA Card | 1.38 | 0.96 | 0.17 | 0.11 |
| Time per Step | 0.02 | 0.02 | 0.02 | 0.02 |
| Algorithm | OSPA Dist | OSPA Loc | OSPA Card |
|---|---|---|---|
| A1 | 5.89 | 5.25 | 0.64 |
| A2 | 5.30 | 5.27 | 0.13 |
| A3 | 5.51 | 5.25 | 0.26 |
| MIA-JDT | 5.18 | 5.07 | 0.11 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, R.; Li, X.; Sun, J.; Shan, T. Multi-Information-Assisted Joint Detection and Tracking of Ground Moving Target for Airborne Radar. Remote Sens. 2025, 17, 2093. https://doi.org/10.3390/rs17122093
Liu R, Li X, Sun J, Shan T. Multi-Information-Assisted Joint Detection and Tracking of Ground Moving Target for Airborne Radar. Remote Sensing. 2025; 17(12):2093. https://doi.org/10.3390/rs17122093
Chicago/Turabian StyleLiu, Ran, Xiangqian Li, Jinping Sun, and Tao Shan. 2025. "Multi-Information-Assisted Joint Detection and Tracking of Ground Moving Target for Airborne Radar" Remote Sensing 17, no. 12: 2093. https://doi.org/10.3390/rs17122093
APA StyleLiu, R., Li, X., Sun, J., & Shan, T. (2025). Multi-Information-Assisted Joint Detection and Tracking of Ground Moving Target for Airborne Radar. Remote Sensing, 17(12), 2093. https://doi.org/10.3390/rs17122093