
Extended Object Tracking Using an Orientation Vector Based on Constrained Filtering

Abstract
1. Introduction
2. Existing Work and Motivations
2.1. Existing EOT Approaches Modeling the Orientation Angle Separately
2.1.1. Shape and Orientation Angle Dynamic Models
2.1.2. Kinematic Dynamic Model
2.1.3. Measurement Model
2.2. Motivations
3. Modeling
3.1. EO State
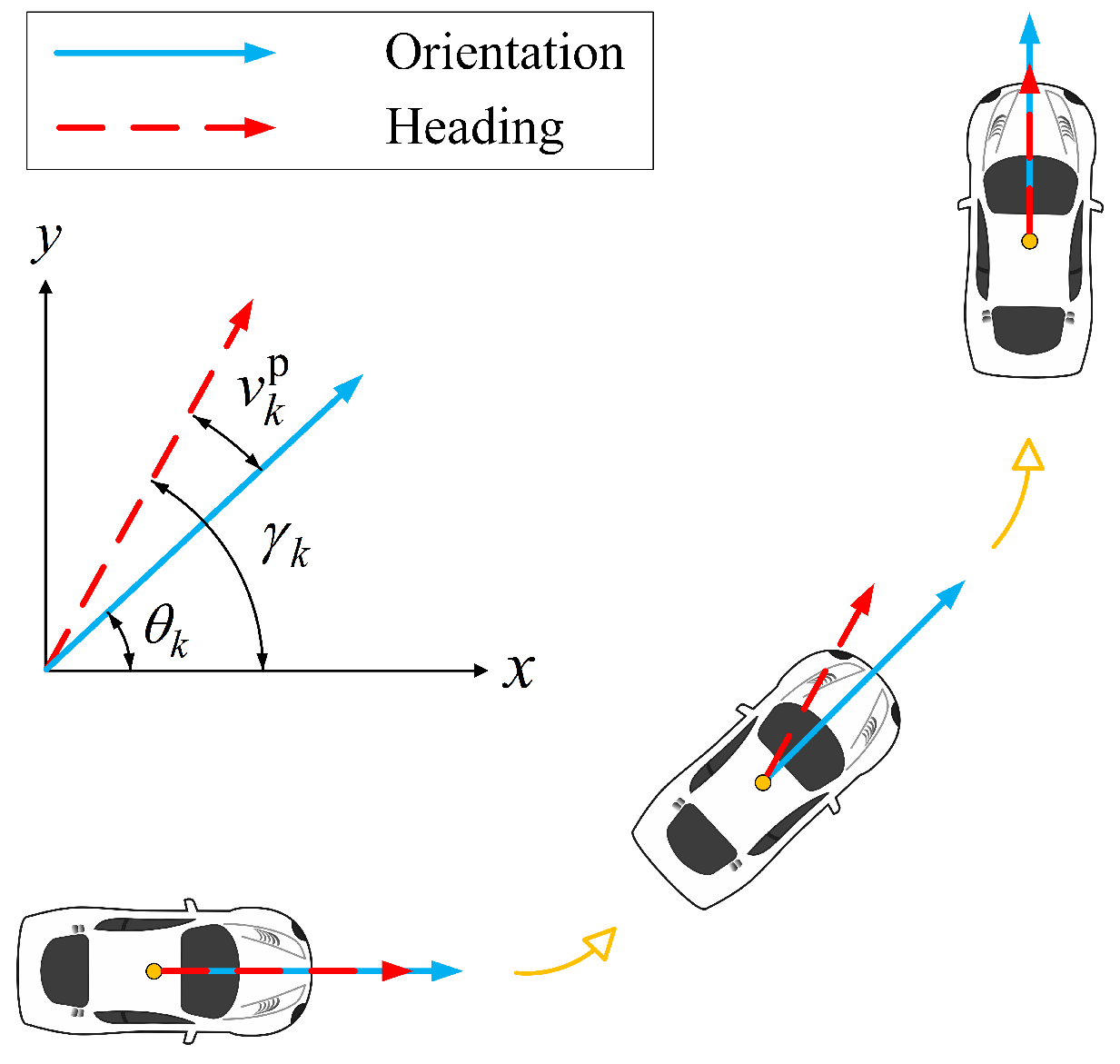
3.2. Orientation Vector Model
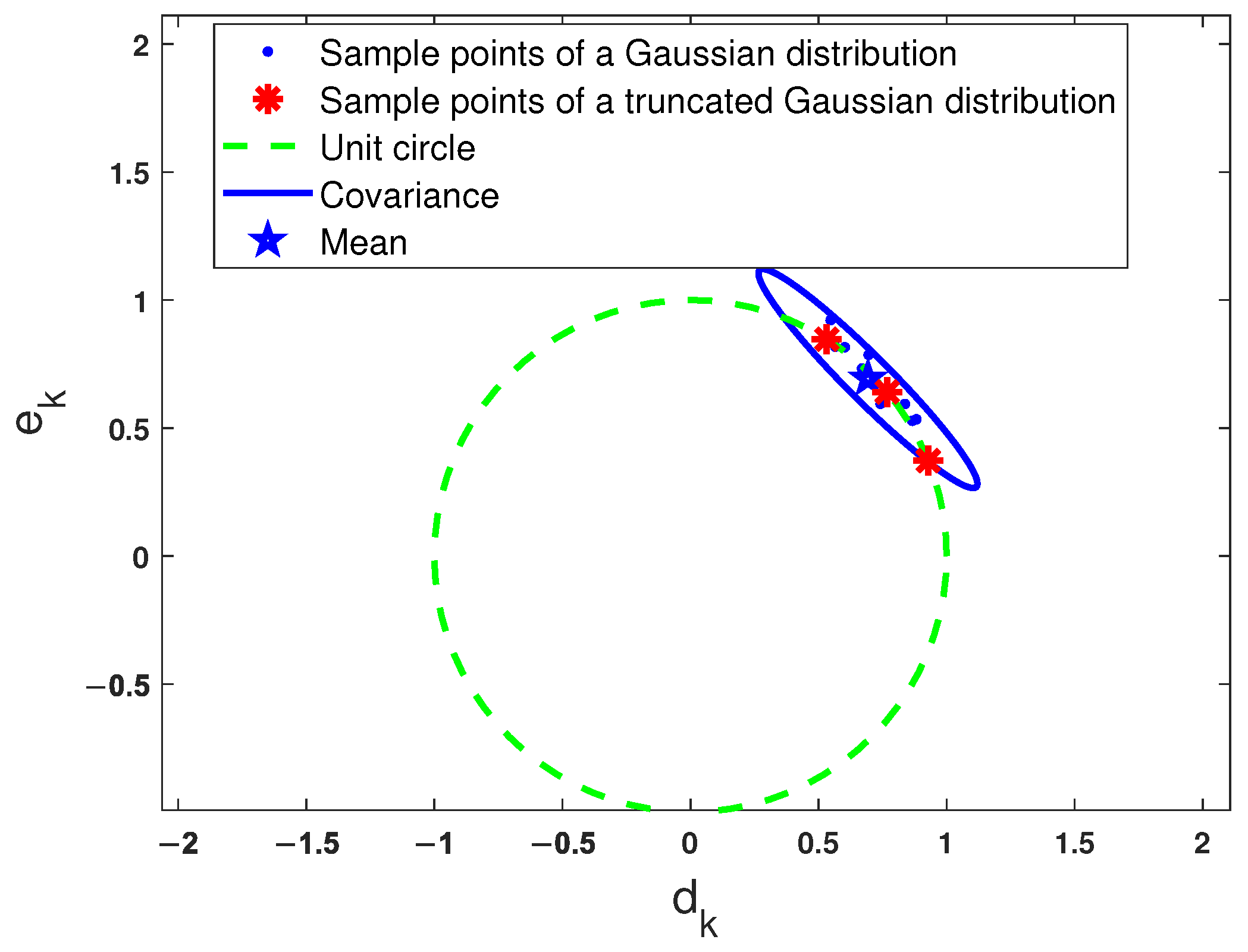
3.2.1. Orientation Vector Distribution and Rotation Matrix
3.2.2. Dynamic Model of the Orientation Vector
3.3. Heading Constraint on the Orientation Vector
3.4. New Measurement Model
4. Variational Bayesian Approach to EOT
4.1. Pseudo-Measurement
4.2. Likelihood Function
4.3. Prediction
4.4. Measurement Update Using the Variational Bayesian Approach
4.4.1. Measurement Update Without Using Pseudo-Measurement
4.4.2. Measurement Update Using Pseudo-Measurement
| Algorithm 1: One cycle of the proposed EOT-OV and EOT-OV0 |
 |
5. Results
5.1. Experiments with Simulated Data
5.1.1. Scenario 1
5.1.2. Scenario 2
5.2. Experiments with Real Data in the VoD Dataset
5.2.1. Bicyclist Tracking
5.2.2. Motorcyclist Tracking
5.3. Experiment with Real Data in the nuScenes Dataset
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. A Proof of ML Equation
Appendix B. Calculation of and
Appendix C. Calculation of , , and
References
- Koch, W. Bayesian Approach to Extended Object and Cluster Tracking Using Random Matrices. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 1042–1059. [Google Scholar] [CrossRef]
- Feldmann, M.; Fränken, D.; Koch, W. Tracking of Extended Objects and Group Targets Using Random Matrices. IEEE Trans. Signal Process. 2011, 59, 1409–1420. [Google Scholar] [CrossRef]
- Li, P.; Ge, H.; Yang, J.; Wang, W. Modified Gaussian Inverse Wishart Phd Filter for Tracking Multiple Non-ellipsoidal Extended Targets. Signal Process. 2018, 150, 191–203. [Google Scholar] [CrossRef]
- Lan, J.; Li, X.R. Extended-Object or Group-Target Tracking Using Random Matrix with Nonlinear Measurements. IEEE Trans. Signal Process. 2019, 67, 5130–5142. [Google Scholar] [CrossRef]
- Hu, Q.; Ji, H.; Zhang, Y. A Standard PHD Filter for Joint Tracking and Classification of Maneuvering Extended Targets Using Random Matrix. Signal Process. 2018, 144, 352–363. [Google Scholar] [CrossRef]
- Sun, L.; Yu, H.; Fu, Z.; He, Z.; Zou, J. Modeling and Tracking of Maneuvering Extended Object with Random Hypersurface. IEEE Sensors J. 2021, 21, 20552–20562. [Google Scholar] [CrossRef]
- Granström, K.; Baum, M.; Reuter, S. Extended Object Tracking: Introduction, Overview and Applications. J. Adv. Inf. Fusion 2017, 12, 139–174. [Google Scholar]
- Mihaylova, L.; Carmi, A.Y.; Septier, F.; Gning, A.; Pang, S.K.; Godsill, S. Overview of Bayesian Sequential Monte Carlo Methods for Group and Extended Object Tracking. Digit. Signal Process. 2014, 25, 1–16. [Google Scholar] [CrossRef]
- Degerman, J.; Wintenby, J.; Svensson, D. Extended Target Tracking Using Principal Components. In Proceedings of the IEEE 14th International Conference on Information Fusion, Chicago, IL, USA, 5–8 July 2011; pp. 1–8. [Google Scholar]
- Yang, S.; Baum, M. Tracking the Orientation and Axes Lengths of an Elliptical Extended Object. IEEE Trans. Signal Process. 2019, 67, 4720–4729. [Google Scholar] [CrossRef]
- Liu, S.; Liang, Y.; Xu, L. Maneuvering Extended Object Tracking Based on Constrained Expectation Maximization. Signal Process. 2022, 201, 108729. [Google Scholar] [CrossRef]
- Liu, S.; Liang, Y.; Xu, L.; Li, T.; Hao, X. EM-based Extended Object Tracking without A Priori Extension Evolution Model. Signal Process. 2021, 188, 108181. [Google Scholar] [CrossRef]
- Tuncer, B.; Özkan, E. Random Matrix Based Extended Target Tracking with Orientation: A New Model and Inference. IEEE Trans. Signal Process. 2021, 69, 1910–1923. [Google Scholar] [CrossRef]
- Li, Z.; Liang, Y.; Xu, L. Distributed Extended Object Tracking Using Coupled Velocity Model From WLS Perspective. IEEE Trans. Signal Inform. Process. Netw. 2022, 8, 459–474. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, K.; Zhou, G. State Estimation with Heading Constraints for On-Road Vehicle Tracking. IEEE Trans. Intell. Transp. Syst. 2022, 23, 13614–13635. [Google Scholar] [CrossRef]
- Li, M.; Lan, J.; Li, X.R. Tracking of Elliptical Object with Unknown but Fixed Lengths of Axes. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 6518–6533. [Google Scholar] [CrossRef]
- Bishop, C.M. Pattern Recognition and Machine Learning; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Yang, S.; Baum, M. Extended Kalman Filter for Extended Object Tracking. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, New Orleans, LA, USA, 5–9 March 2017; pp. 4386–4390. [Google Scholar]
- Li, X.R.; Jilkov, V.P. Survey of Maneuvering Target Tracking. Part I. Dynamic Models. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1333–1364. [Google Scholar]
- Kellner, D.; Barjenbruch, M.; Klappstein, J.; Dickmann, J.; Dietmayer, K. Tracking of Extended Objects with High-resolution Doppler Radar. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1341–1353. [Google Scholar] [CrossRef]
- Jeon, W.; Zemouche, A.; Rajamani, R. Tracking of Vehicle Motion on Highways and Urban Roads Using a Nonlinear Observer. IEEE/ASME Trans. Mechatron. 2019, 24, 644–655. [Google Scholar] [CrossRef]
- Bertipaglia, A.; Alirezaei, M.; Happee, R.; Shyrokau, B. An Unscented Kalman Filter-informed Neural Network for Vehicle Sideslip Angle Estimation. IEEE Trans. Veh. Technol. 2024, 73, 12731–12746. [Google Scholar] [CrossRef]
- Gräber, T.; Lupberger, S.; Unterreiner, M.; Schramm, D. A Hybrid Approach to Side-Slip Angle Estimation with Recurrent Neural Networks and Kinematic Vehicle Models. IEEE Trans. Intell. Veh. 2019, 4, 39–47. [Google Scholar] [CrossRef]
- Burkardt, J. The Truncated Normal Distribution. Dep. Sci. Comput. Website Fla. State Univ. 2014, 1, 35. [Google Scholar]
- Julier, S.J.; LaViola, J.J. On Kalman Filtering with Nonlinear Equality Constraints. IEEE Trans. Signal Process. 2007, 55, 2774–2784. [Google Scholar] [CrossRef]
- Crouse, D.F. Cubature/Unscented/Sigma Point Kalman Filtering with Angular Measurement Models. In Proceedings of the IEEE 18th International Conference on Information Fusion, Washington, DC, USA, 6–9 July 2015; pp. 1550–1557. [Google Scholar]
- Cao, X.; Lan, J.; Li, X.R.; Liu, Y. Automotive Radar-Based Vehicle Tracking Using Data-Region Association. IEEE Trans. Intell. Transp. Syst. 2022, 23, 8997–9010. [Google Scholar] [CrossRef]
- Yang, C.; Blasch, E. Kalman Filtering with Nonlinear State Constraints. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 70–84. [Google Scholar] [CrossRef]
- Zanetti, R.; Majji, M.; Bishop, R.H.; Mortari, D. Norm-Constrained Kalman Filtering. J. Guid. Control Dyn. 2009, 32, 1458–1465. [Google Scholar] [CrossRef]
- Šmídl, V.; Quinn, A. The Variational Bayes Method in Signal Processing; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Tuncer, B.; Orguner, U.; Özkan, E. Multi-Ellipsoidal Extended Target Tracking with Variational Bayes Inference. IEEE Trans. Signal Process. 2022, 70, 3921–3934. [Google Scholar] [CrossRef]
- Liu, B.; Tharmarasa, R.; Jassemi, R.; Brown, D.; Kirubarajan, T. Extended Target Tracking with Multipath Detections, Terrain-Constrained Motion Model and Clutter. IEEE Trans. Intell. Transp. Syst. 2020, 22, 7056–7072. [Google Scholar] [CrossRef]
- Zhang, L.; Lan, J. Extended Object Tracking Using Random Matrix with Skewness. IEEE Trans. Signal Process. 2020, 68, 5107–5121. [Google Scholar] [CrossRef]
- Steuernagel, S.; Thormann, K.; Baum, M. CNN-Based Shape Estimation for Extended Object Tracking Using Point Cloud Measurements. In Proceedings of the 2022 25th International Conference on Information Fusion (FUSION), Linköping, Sweden, 4–7 July 2022; pp. 1–8. [Google Scholar]
- Givens, C.R.; Shortt, R.M. A Class of Wasserstein Metrics for Probability Distributions. Mich. Math. J. 1984, 31, 231–240. [Google Scholar] [CrossRef]
- Yang, S.; Baum, M.; Granström, K. Metrics for Performance Evaluation of Elliptic Extended Object Tracking Methods. In Proceedings of the IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems, Baden-Baden, Germany, 19–21 September 2016; pp. 523–528. [Google Scholar]
- Zhang, L.; Lan, J. Tracking of Extended Object Using Random Matrix with Non-Uniformly Distributed Measurements. IEEE Trans. Signal Process. 2021, 69, 3812–3825. [Google Scholar] [CrossRef]
- Palffy, A.; Pool, E.; Baratam, S.; Kooij, J.F.; Gavrila, D.M. Multi-Class Road User Detection with 3+1D Radar in the View-of-Delft Dataset. IEEE Robot. Autom. Lett. 2022, 7, 4961–4968. [Google Scholar] [CrossRef]
- Caesar, H.; Bankiti, V.; Lang, A.H.; Vora, S.; Liong, V.E.; Xu, Q.; Krishnan, A.; Pan, Y.; Baldan, G.; Beijbom, O. nuScenes: A Multimodal Dataset for Autonomous Driving. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 11618–11628. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Orientation-Based Approaches | Limitations |
|---|---|---|
| [9,10,13] | Based on the orientation | Cannot use the heading constraint |
| [11,12,14] | Based on the sideslip angle | Cannot directly model the angle |
| [15] | Based on the heading angle constraint | Applicable to the point target tracking |
| [16] | Based on the orientation vector | Cannot use the heading constraint |
| Algorithm | EOT-OV | EOT-OV0 | EOT-OA | MEM-EKF | NN-ETT |
|---|---|---|---|---|---|
| Time (s) | 0.0075 | 0.0056 | 0.0062 | 0.0051 | 0.0077 |
| Relative Time | 1.3349 | 1.000 | 1.1080 | 0.9081 | 1.3750 |
| Iteration Numbers | N = 2 | N = 3 | N = 4 | N = 6 | N = 8 | N = 10 |
|---|---|---|---|---|---|---|
| AGWDA | 0.2931 | 0.2906 | 0.2883 | 0.2883 | 0.2883 | 0.2883 |
| 0.0025 | 0.0050 | 0.01 | 0.05 | 0.1 | 0.2 | |
| AGWDA | 0.3637 | 0.2956 | 0.2822 | 0.2808 | 0.2825 | 0.2860 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wen, Z.; Zheng, L.; Zeng, T. Extended Object Tracking Using an Orientation Vector Based on Constrained Filtering. Remote Sens. 2025, 17, 1419. https://doi.org/10.3390/rs17081419
Wen Z, Zheng L, Zeng T. Extended Object Tracking Using an Orientation Vector Based on Constrained Filtering. Remote Sensing. 2025; 17(8):1419. https://doi.org/10.3390/rs17081419
Chicago/Turabian StyleWen, Zheng, Le Zheng, and Tao Zeng. 2025. "Extended Object Tracking Using an Orientation Vector Based on Constrained Filtering" Remote Sensing 17, no. 8: 1419. https://doi.org/10.3390/rs17081419
APA StyleWen, Z., Zheng, L., & Zeng, T. (2025). Extended Object Tracking Using an Orientation Vector Based on Constrained Filtering. Remote Sensing, 17(8), 1419. https://doi.org/10.3390/rs17081419