
Local Convergence Index-Based Infrared Small Target Detection against Complex Scenes
 , ,
, ,
Abstract
1. Introduction
- A novel detection scheme for infrared small targets based on an LCI filter is proposed, with a high detection rate and a low false alarm rate that outperforms SOTA techniques; the scheme also has low time consumption and is beneficial for practical applications against complex scenes.
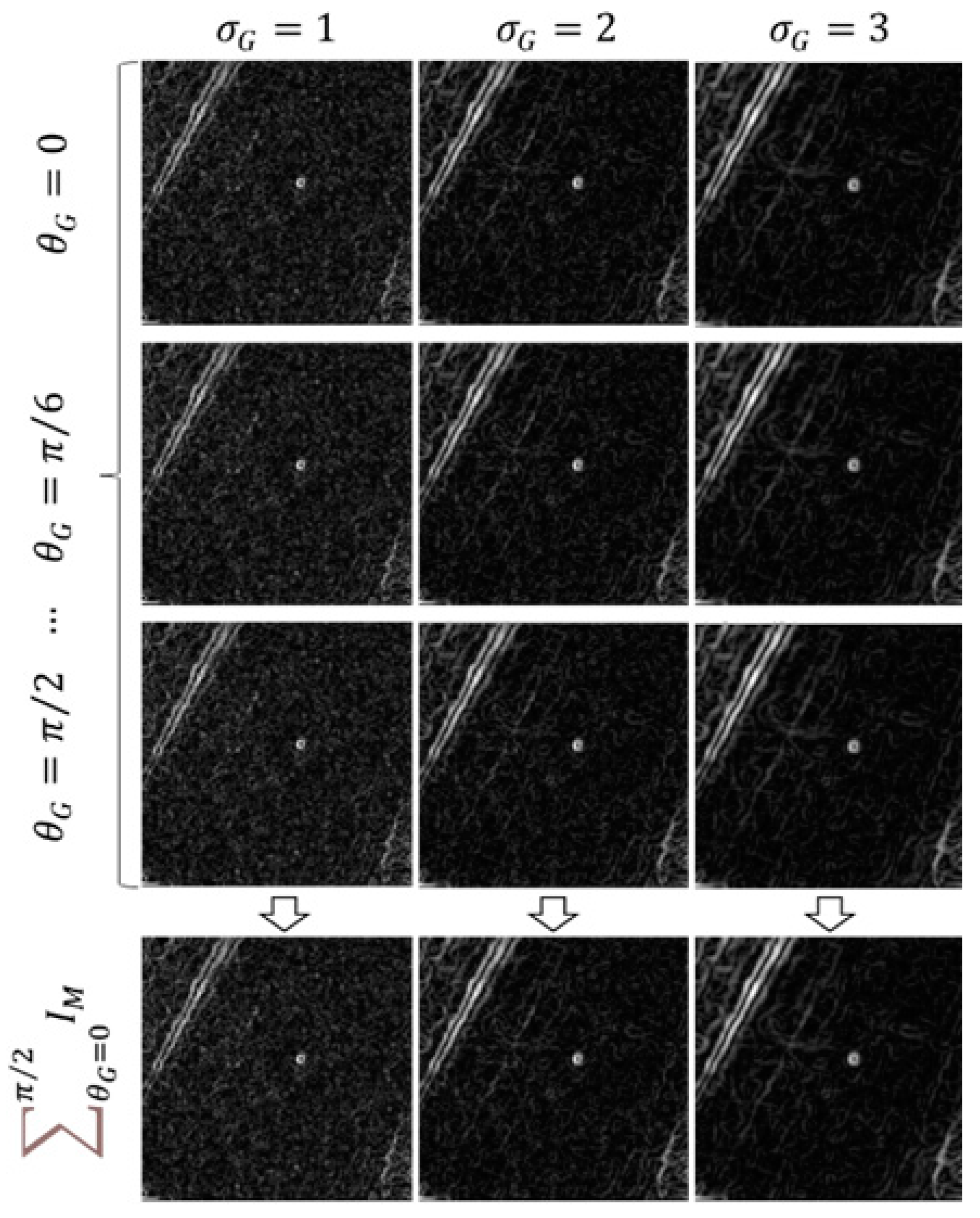
- In the coarse detection stage of candidate regions, the sensitivity and accuracy of infrared small target detection are significantly improved by introducing a multi-scale and multi-directional gradient weighting strategy.
- To solve the imbalance problem between true targets and false-alarm sources for infrared small target detection, we used RUSBoost as a classifier, which combines undersampling and ensemble learning. For larger sample sizes, undersampling can fully reflect its advantages and improve the operational efficiency while balancing the dataset.
2. Methodology
2.1. Related Works
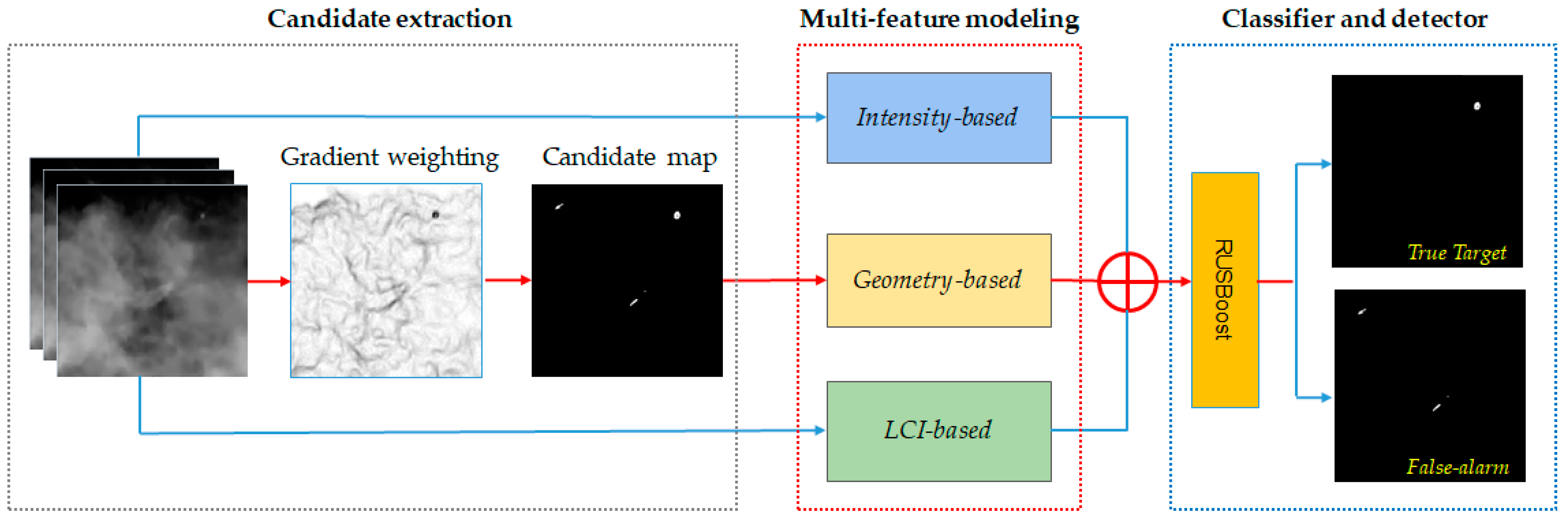
2.2. Overall Framework
2.3. Candidate Extraction
2.4. Multi-Feature Modeling
2.4.1. Intensity-Based Features
2.4.2. Geometry-Based Features
- Rectangularity (): the ratio of the target area to the area of the enclosing matrix.
- Roundness (): the ratio of the target area to the square of the outer contour perimeter.
- Solidity (): the ratio of the target area to the convex area.
- Eccentricity (): the ratio of the distance between the focal point and the long axis length of the ellipse with a same second moment as the region.
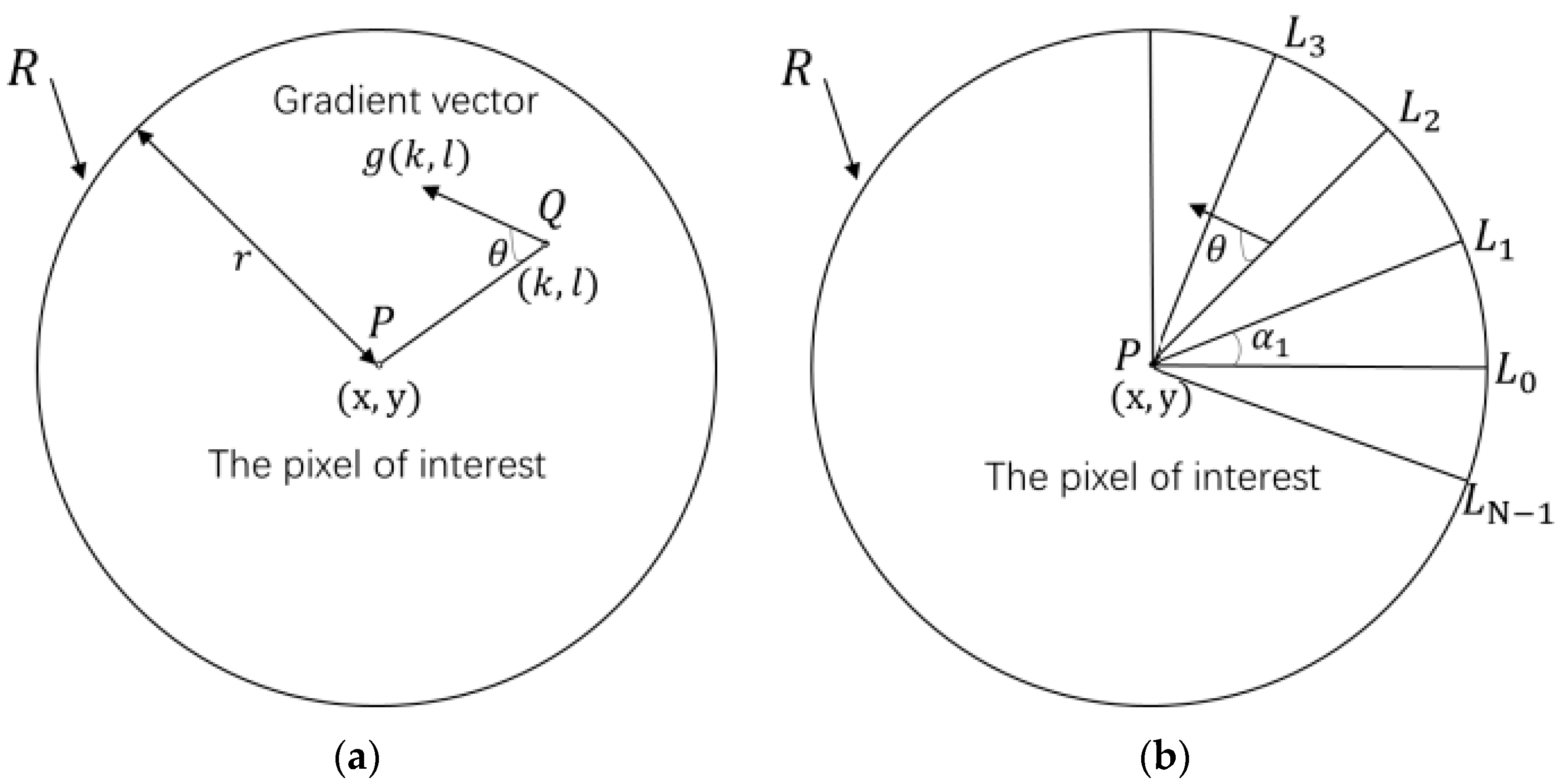
2.4.3. LCI-Based Features
2.5. Classifier and Detector
| Algorithm 1. RUSBoost Classifier [22] | |
| Input: Set of training samples where is the number of training samples, and Output: RUSBoost classifier | |
| 1: | for all |
| 2: | for = 1: do |
| 3: | random undersampling (RUS) training set |
| 4: | extract weights for the subset |
| 5: | Call Weaklearn with subset and weights to get weak classifier : |
| 6: | |
| 7: | Pseudo-loss calculation for and : |
| 8: | |
| 9: | Weight update parameter: |
| 10: | |
| 11: | Update weights and normalization: |
| 12: | |
| 13: | end for |
| 14: | Output and final classifier: |
| 15: | |
3. Experiment Set
3.1. Evaluation Metrics
3.2. Datasets
4. Results
4.1. Candidate Extraction Evaluation
4.2. Candidate Classification Evaluation
4.3. Detection Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kong, X.; Yang, C.; Cao, S.; Li, C.; Peng, Z. Infrared Small Target Detection via Non-Convex Tensor Fibered Rank Approximation. IEEE Trans. Geosci. Remote Sens. 2022, 60, 50003219. [Google Scholar] [CrossRef]
- Zhu, Q.; Zhu, S.; Liu, G.; Peng, Z. Infrared Small Target Detection Using Local Feature-based Density Peaks Searching. IEEE Geosci. Remote Sens. Lett. 2022, 19, 6507805. [Google Scholar] [CrossRef]
- Wang, G.; Tao, B.; Kong, X.; Peng, Z. Infrared Small Target Detection Using Non-Overlapping Patch Spatial-Temporal Tensor Factorization with Capped Nuclear Norm Regularization. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5001417. [Google Scholar]
- Li, B.; Xiao, C.; Wang, L.; Wang, Y.; Lin, Z.; Li, M.; An, W.; Guo, Y. Dense Nested Attention Network for Infrared Small Target Detection. IEEE Trans. Image Process. 2022; accepted. [Google Scholar] [CrossRef]
- Hou, Q.; Wang, Z.; Tan, F. RISTDnet: Robust Infrared Small Target Detection Network. IEEE Geosci. Remote Sens. Lett. 2021, 99, 1–5. [Google Scholar] [CrossRef]
- Zhang, T.; Li, L.; Cao, S.; Pu, T.; Peng, Z. Attention-Guided Pyramid Context Networks for Detecting Infrared Small Target Under Complex Background. IEEE Trans. Aerosp. Electron. Syst. 2023, 1–13. [Google Scholar] [CrossRef]
- Dai, Y.; Wu, Y.; Zhou, F. Attentional Local Contrast Networks for Infrared Small Target Detection. IEEE Trans. Geosci. Remote Sens. 2021, 59, 9813–9824. [Google Scholar] [CrossRef]
- Chen, C.; Li, H.; Wei, Y. A Local Contrast Method for Small Infrared Target Detection. IEEE Trans. Geosci. Remote Sens. 2014, 52, 574–581. [Google Scholar] [CrossRef]
- Wei, Y.; You, X.; Li, H. Multiscale patch-based contrast measure for small infrared target detection. Pattern Recognit 2016, 58, 216–226. [Google Scholar] [CrossRef]
- Gao, C.; Meng, D.; Yang, Y. Infrared patch-image model for small target detection in a single image. IEEE Trans. Image Process. 2013, 22, 4996–5009. [Google Scholar] [CrossRef]
- Dai, Y.; Wu, Y.; Song, Y. Infrared small target and background separation via column-wise weighted robust principal component analysis. Infrared Phys. Technol. 2016, 77, 421–430. [Google Scholar] [CrossRef]
- Dai, Y.; Wu, Y.; Song, Y. Non-negative infrared patch-image model: Robust target-background separation via partial sum minimization of singular values. Infrared Phys. Technol. 2017, 81, 182–194. [Google Scholar] [CrossRef]
- Zhang, L.; Peng, Z. Infrared Small Target Detection Based on Partial Sum of the Tensor Nuclear Norm. Remote Sens. 2019, 11, 382. [Google Scholar] [CrossRef]
- Kobatake, H.; Hashimoto, S. Convergence index filter for vector fields. IEEE Trans. Image Process. 1999, 8, 1029–1038. [Google Scholar] [CrossRef]
- Van Hulse, J.; Khoshgoftaar, T.M.; Napolitano, A. Experimental perspectives on learning from imbalanced data. In Proceedings of the 24th International Conference on Machine Learning, New York, NY, USA, 20–24 June 2007; pp. 935–942. [Google Scholar]
- Deng, J.; Tang, P.; Zhao, X.; Pu, T.; Qu, C.; Peng, Z. Local Structure Awareness-Based Retinal Microaneurysm Detection with Multi-Feature Combination. Biomedicines 2022, 10, 124. [Google Scholar] [CrossRef]
- Zhao, X.; Wang, H.; Peng, Z. Fine segmentation of fundus optic disc based on SLIC superpixel. In Proceedings of the AOPC 2019: AI in Optics and Photonics, Beijing, China, 7–9 July 2019; Volume 11342, pp. 155–163. [Google Scholar]
- Wang, H.; Yuan, G.; Zhao, X.; Peng, L.; Wang, Z.; He, Y.; Qu, C.; Peng, Z. Hard exudate detection based on deep model learned information and multi-feature joint representation for diabetic retinopathy screening. Comput. Methods Programs Biomed. 2020, 191, 105398. [Google Scholar] [CrossRef]
- Sun, L.; Wang, Z.; Pu, H.; Yuan, G.; Guo, L.; Pu, T.; Peng, Z. Spectral Analysis for Pulmonary Nodule Detection Using Optimal Fractional S-Transform. Comput. Biol. Med. 2020, 119, 103075. [Google Scholar] [CrossRef]
- Huang, S.; Liu, Y.; He, Y.; Zhang, T.; Peng, Z. Structure adaptive clutter suppression for infrared small target detection: Chain-growth filtering. Remote Sens. 2020, 12, 47. [Google Scholar] [CrossRef]
- Yang, N.; Yan, B.; Liu, M. Coefficient design for combination pulse based on the Gaussian pulse derivatives. J. Yangzhou Univ. (Nat. Sci. Ed.) 2009, 12, 40–43. [Google Scholar]
- Dashtbozorg, B.; Zhang, J.; Romeny, B. Retinal Microaneurysms Detection using Local Convergence Index Features. IEEE Trans. Image Process. 2018, 27, 3300–3315. [Google Scholar] [CrossRef] [PubMed]
- Peng, Z.; Zhang, Q.; Wang, J.; Zhang, Q. Dim target detection based on nonlinear multi-feature fusion by Karhunen-Loeve transform. Opt. Eng. 2004, 43, 2954–2958. [Google Scholar]
- Wang, X.; Peng, Z.; Kong, D.; He, Y. Infrared dim and small target detection based on stable multi-subspace learning in heterogeneousscene. IEEE Trans. Geosci. Remote Sens. 2017, 55, 5481–5493. [Google Scholar] [CrossRef]
- Huang, S.; Peng, Z.; Wang, Z.; Wang, X.; Li, M. Infrared Small Target Detection by Density Peaks Searching and Maximum-gray Region Growing. IEEE Geosci. Remote Sens. Lett. 2019, 19, 1919–1923. [Google Scholar] [CrossRef]
- Wang, Y.; Peng, Z.; He, Y. The optimal fractional S transform of seismic signals based on normalized second-order central moment. J. Appl. Geophys. 2016, 129, 8–16. [Google Scholar] [CrossRef]
- Fan, X.; Xu, Z.; Zhang, J.; Huang, Y.; Peng, Z.; Wei, Z.; Guo, H. Dim small target detection based on high-order cumulant of motion estimation. Infrared Phys. Technol. 2019, 99, 86–101. [Google Scholar] [CrossRef]
- Wei, J.; Hagihara, Y.; Kobatake, H. Detection of cancerous tumors on chest X-ray images-candidate detection filter and its evaluation. IEEE Trans. Image Process. 1999, 3, 397–401. [Google Scholar]
- Pereira, C.S.; Fernandes, H.; Mendonça, A.M.; Campilho, A. Detection of lung nodule candidates in chest radiographs. In Pattern Recognition and Image Analysis; Publishing House: Berlin, Germany, 2007; pp. 170–177. [Google Scholar]
- Seiffert, C.; Khoshgoftaar, T.M.; Van Hulse, J.; Napolitano, A. RUSBoost: A Hybrid Approach to Alleviating Class Imbalance. IEEE Trans. Syst. Man Cybern.-Part A Syst. Hum. 2010, 40, 185–197. [Google Scholar] [CrossRef]
- Nock, R.; Lefaucheur, P. A robust boosting algorithm. In Proceedings of the 13th European Conference on Machine Learning, Helsinki, Finland, 19–23 August 2002; pp. 319–330. [Google Scholar]
- Dai, Y.; Wu, Y.; Zhou, F.; Barnard, K. Asymmetric contextual modulation for infrared small target detection. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Virtual, 5–9 January 2021; pp. 950–959. [Google Scholar]
- Wang, H.; Zhou, L.; Wang, L. Miss detection vs. false alarm: Adversarial learning for small object segmentation in infrared images. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27 October–2 November 2019; pp. 8509–8518. [Google Scholar]
- Cao, S.; Wu, F.; Lian, R.; Zhang, Y.; Peng, Z. Infrared dim target detection via hand-crafted features and deep information combination. In Proceedings of the 17th IEEE Conference on Industrial Electronics and Applications (ICIEA 2022), Chengdu, China, 17–20 July 2022; pp. 3215–3231. [Google Scholar]
- Rivest, J.-F.; Fortin, R. Detection of dim targets in digital infrared imagery by morphological image processing. Opt. Eng. 1996, 35, 1886–1893. [Google Scholar] [CrossRef]
- Deshpande, S.D.; Er, M.H.; Venkateswarlu, R.; Chan, P. Maxmean and max-median filters for detection of small targets. Signal Data Process. Small Targets 1999, 3809, 74–83. [Google Scholar]
- Han, J.; Moradi, S.; Faramarzi, I.; Zhang, H.; Zhao, Q.; Zhang, X.; Li, N. Infrared small target detection based on the weighted strengthened local contrast measure. IEEE Geosci. Remote Sens. Lett. 2020, 6, 24–28. [Google Scholar] [CrossRef]
- Han, J.; Moradi, S.; Faramarzi, I.; Liu, C.; Zhang, H.; Zhao, Q. A local contrast method for infrared small-target detection utilizing a tri-layer window. IEEE Geosci. Remote Sens. Lett. 2019, 17, 1822–1826. [Google Scholar] [CrossRef]
- Zhang, L.; Peng, L.; Zhang, T.; Cao, S.; Peng, Z. Infrared small target detection via non-convex rank approximation minimization joint l2, 1 norm. Remote Sens. 2019, 10, 1821. [Google Scholar] [CrossRef]
- Dai, Y.; Wu, Y. Reweighted infrared patch-tensor model with both nonlocal and local priors for single-frame small target detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 3752–3767. [Google Scholar] [CrossRef]
- Sun, Y.; Yang, J.; An, W. Infrared Dim and Small Target Detection via Multiple Subspace Learning and Spatial-Temporal Patch-Tensor Mode. IEEE Trans. Geosci. Remote Sens. 2021, 59, 3737–3752. [Google Scholar] [CrossRef]
- Goldfarb, D.; Qin, Z. Robust low-rank tensor recovery: Models and algorithms. SIAM J. Matrix Anal. Appl. 2014, 35, 225–253. [Google Scholar] [CrossRef]
- Yang, J.; Zhao, X.; Ji, T.; Ma, T.; Huang, T. Low-rank tensor train for tensor robust principal component analysis. Appl. Math. Comput. 2020, 367, 124783. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Name | Description |
|---|---|---|
| Intensity-based features | The mean, standard deviation and skewness | |
| The entropy and energy | ||
| The contrast | ||
| Geometry-based features | Ratio of the target area to the area of the enclosing matrix | |
| Ratio of the target area to the square of the perimeter of the outer contour | ||
| Ratio of the target area to the convex area | ||
| Ratio of distance between the foci and the major axis length of the ellipse with a same second moment as the region | ||
| LCI-based features | ARF filter responses on and its radius average | |
| SBF filter responses on and its radius average | ||
| DRF filter responses on and its radius average |
| Datasets | Image Type | Background | NI | Target Type |
|---|---|---|---|---|
| NUAA-SIRST | Real | Cloud/city/sea | 427 | Point/spot/extended |
| NUDT-SIRST | Synthetic | Cloud/City/Sea/Field/Highlight | 1327 | Point/spot/extended |
| Datasets | Recall | FPI |
|---|---|---|
| NUAA-SIRST | 0.9834 | 2.86 |
| NUDT-SIRST | 0.9665 | 1.86 |
| Feature Subset | NUAA-SIRST | NUDT-SIRST |
|---|---|---|
| IF | 0.94412 | 0.9747 |
| GF | 0.938 | 0.96678 |
| IF + GF | 0.97083 | 0.99342 |
| IF + GF + ARF | 0.97425 | 0.9953 |
| IF + GF + SBF | 0.97559 | 0.99541 |
| IF + GF + DRF | 0.98762 | 0.99573 |
| All | 0.98882 | 0.99661 |
| Method | NUDT-SIRST | NUAA-SIRST | ||||
|---|---|---|---|---|---|---|
| IoU | IoU | |||||
| (×10−2) | (×10−2) | (×10−6) | (×10−2) | (×10−2) | (×10−6) | |
| Top-hat [35] | 20.72 | 78.41 | 166.7 | 7.143 | 79.84 | 1012 |
| Max–median [36] | 4.197 | 58.41 | 36.89 | 4.172 | 69.2 | 55.33 |
| WSLCM [37] | 2.283 | 56.82 | 1309 | 1.158 | 77.95 | 5446 |
| TLLCM [38] | 2.176 | 62.01 | 1608 | 1.029 | 79.09 | 5899 |
| IPI [11] | 17.76 | 74.49 | 41.23 | 25.67 | 85.55 | 11.47 |
| NRAM [39] | 6.927 | 56.4 | 19.27 | 12.16 | 74.52 | 13.85 |
| RIPT [40] | 29.44 | 91.85 | 344.3 | 11.05 | 79.08 | 22.61 |
| PSTNN [13] | 14.85 | 66.13 | 44.17 | 22.4 | 77.95 | 29.11 |
| MSLSTIPT [41] | 8.342 | 47.4 | 888.1 | 10.3 | 82.13 | 1131 |
| MDvsFA-cGAN [33] | 75.14 | 90.47 | 25.34 | 60.3 | 89.35 | 56.35 |
| ACM [32] | 67.08 | 95.67 | 10.18 | 70.33 | 93.91 | 3.728 |
| ALCNet [7] | 81.4 | 96.51 | 9.261 | 73.33 | 96.57 | 30.47 |
| Proposed | 49.64 | 90.64 | 9.833 | 44.35 | 90.6 | 9.06 |
| Step | Time (s) |
|---|---|
| Candidate extraction | 0.02–0.06 |
| Multi-feature modeling | 0.01–0.24 |
| Classifier and detector | 0.04 |
| Method | Time (s) |
|---|---|
| Top-hat | 0.1056 |
| LCM | 7.3676 |
| MPCM | 0.1261 |
| IPI | 5.4185 |
| NRAM | 0.1507 |
| PSTNN | 0.1687 |
| RTRC | 0.7576 |
| TMESNN | 0.1393 |
| proposed | 0.1652 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, S.; Deng, J.; Luo, J.; Li, Z.; Hu, J.; Peng, Z. Local Convergence Index-Based Infrared Small Target Detection against Complex Scenes. Remote Sens. 2023, 15, 1464. https://doi.org/10.3390/rs15051464
Cao S, Deng J, Luo J, Li Z, Hu J, Peng Z. Local Convergence Index-Based Infrared Small Target Detection against Complex Scenes. Remote Sensing. 2023; 15(5):1464. https://doi.org/10.3390/rs15051464
Chicago/Turabian StyleCao, Siying, Jiakun Deng, Junhai Luo, Zhi Li, Junsong Hu, and Zhenming Peng. 2023. "Local Convergence Index-Based Infrared Small Target Detection against Complex Scenes" Remote Sensing 15, no. 5: 1464. https://doi.org/10.3390/rs15051464
APA StyleCao, S., Deng, J., Luo, J., Li, Z., Hu, J., & Peng, Z. (2023). Local Convergence Index-Based Infrared Small Target Detection against Complex Scenes. Remote Sensing, 15(5), 1464. https://doi.org/10.3390/rs15051464