


The Efficiency of Geodetic and Low-Cost GNSS Devices in Urban Kinematic Terrestrial Positioning in Terms of the Trajectory Generated by MMS
 , ,
, , 
Abstract
:
1. Introduction
1.1. Low-Cost Devices in High-Precision Kinematic Terrestrial Positioning
1.2. Paper Focus and Outline
- Determining the quality of georeferencing in purely kinematic GNSS mode;
- Distinguishing between quality of observations and kinematic results from several GNSS devices under consideration; and
- Evaluating the performance of GNSS devices compared to the mobile mapping system (MMS).
2. Materials and Methods
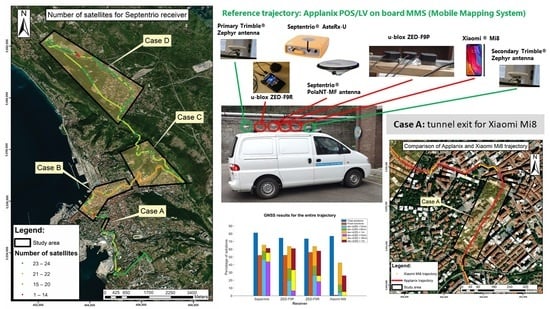
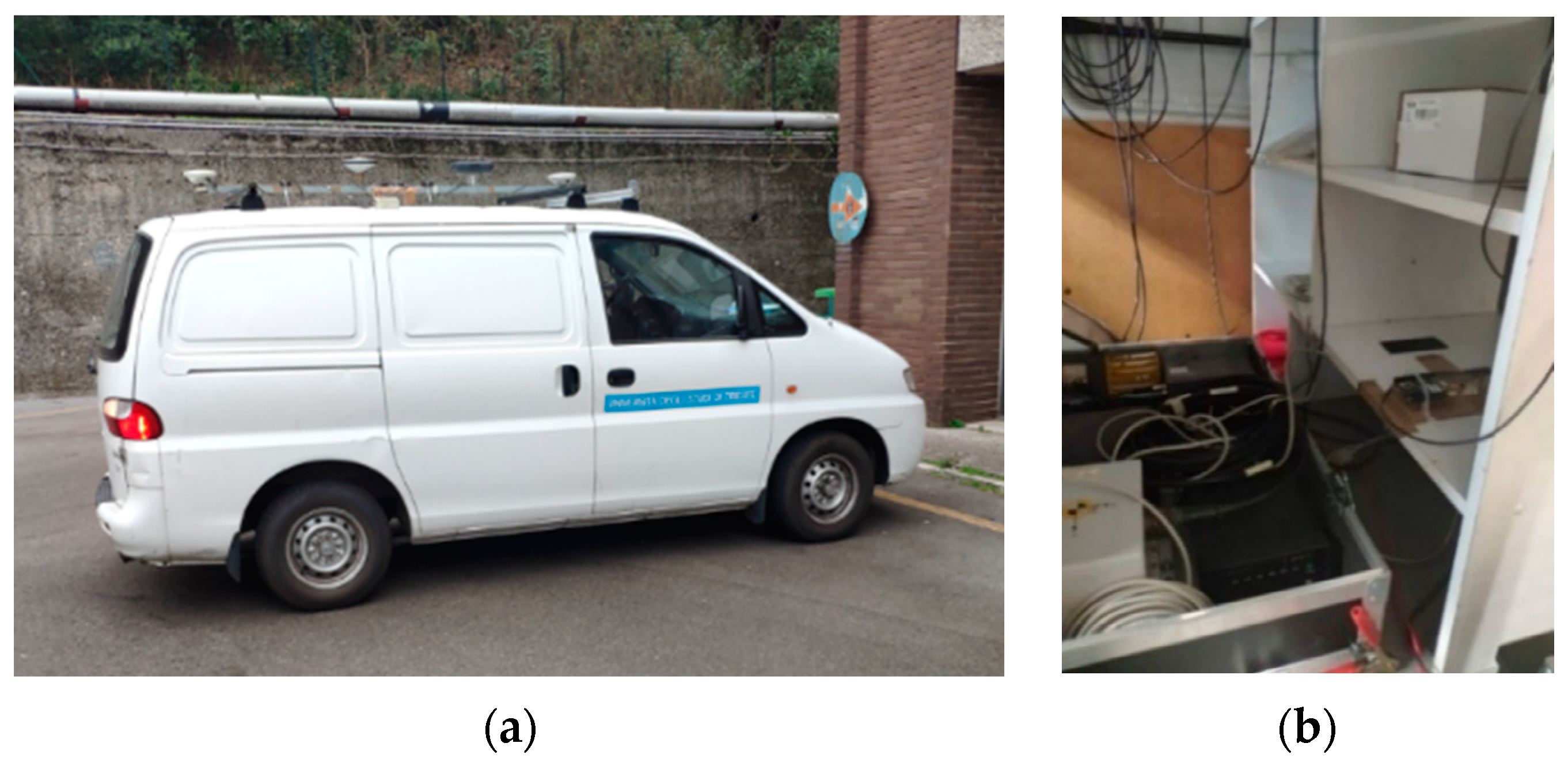
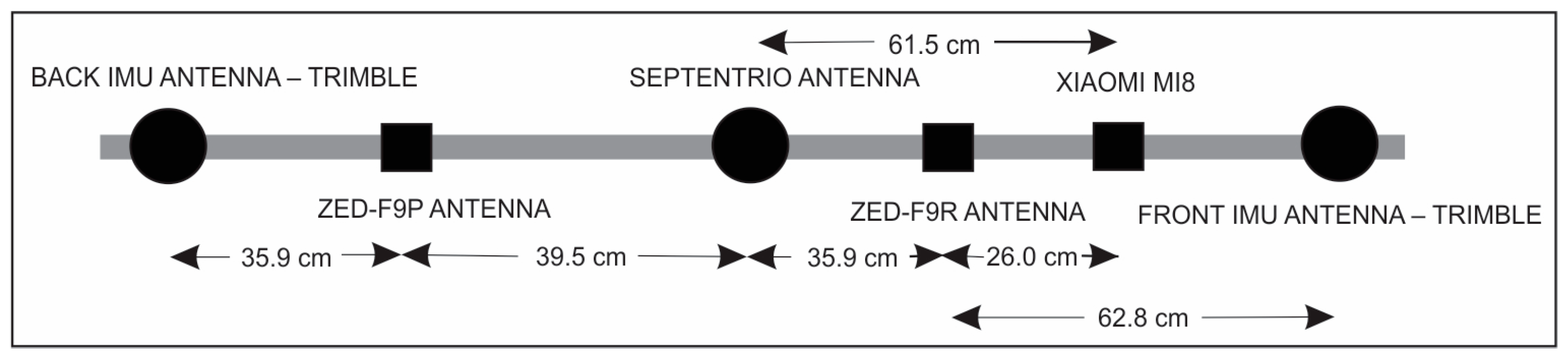
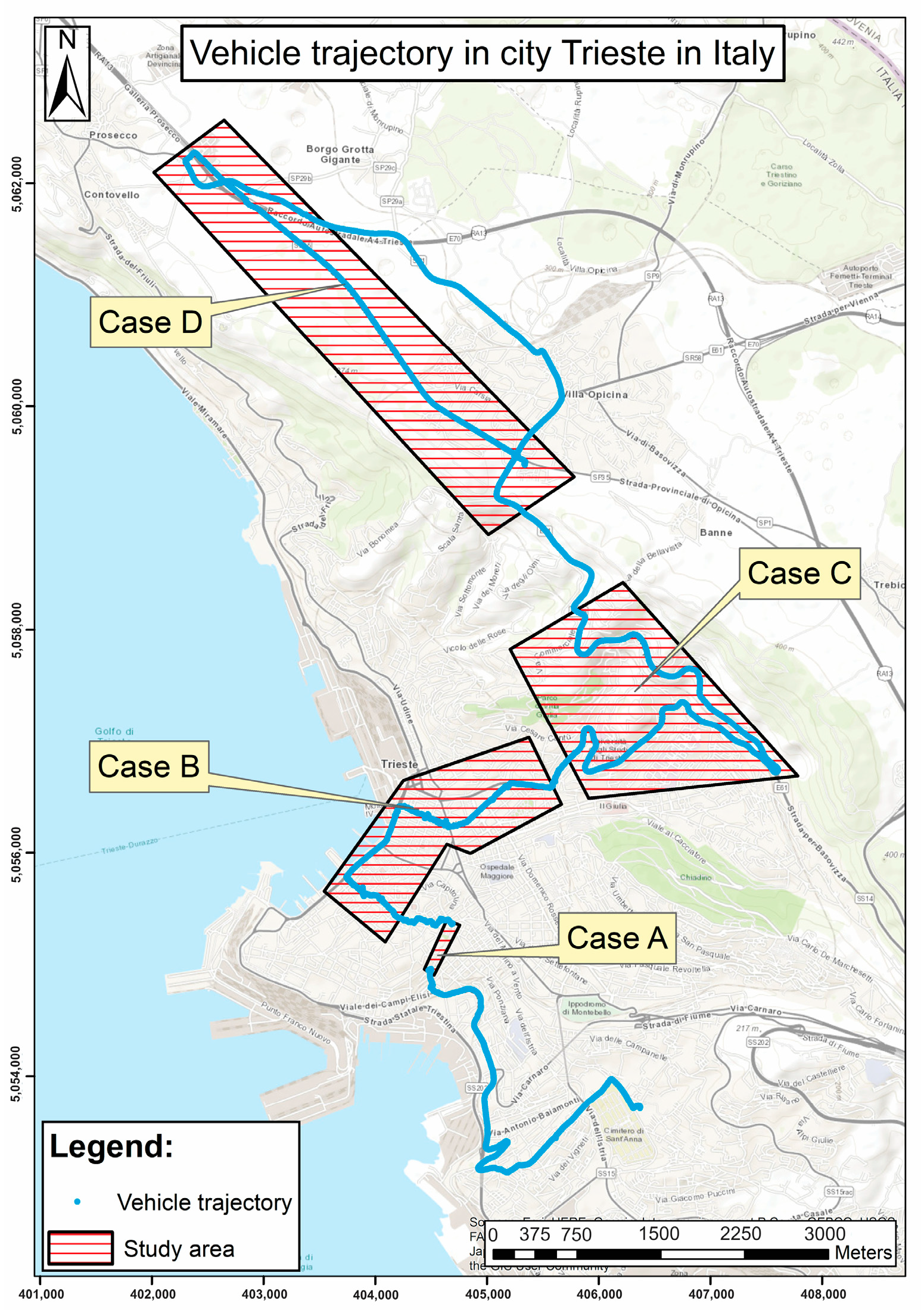
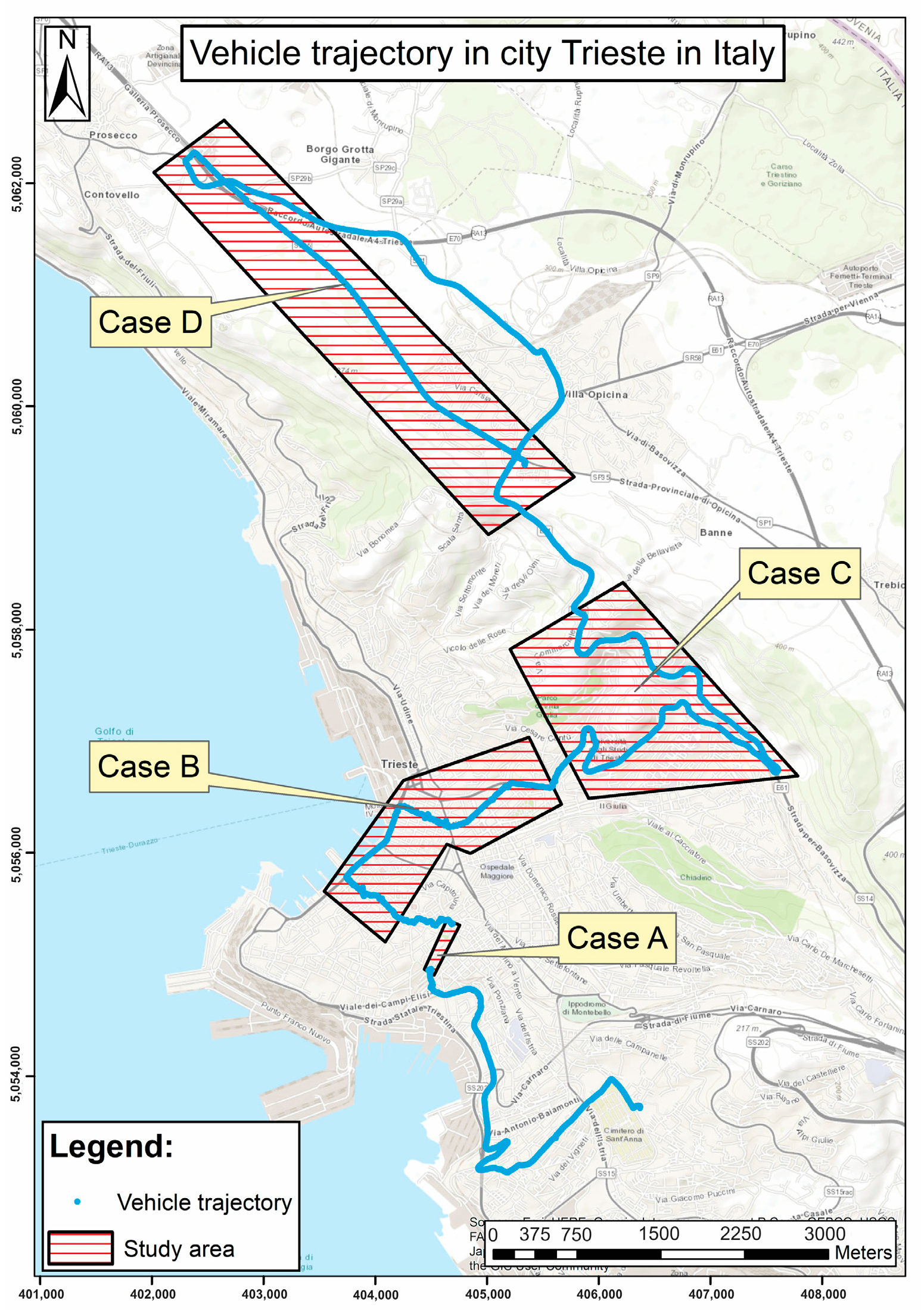
2.1. Survey Experimental Design
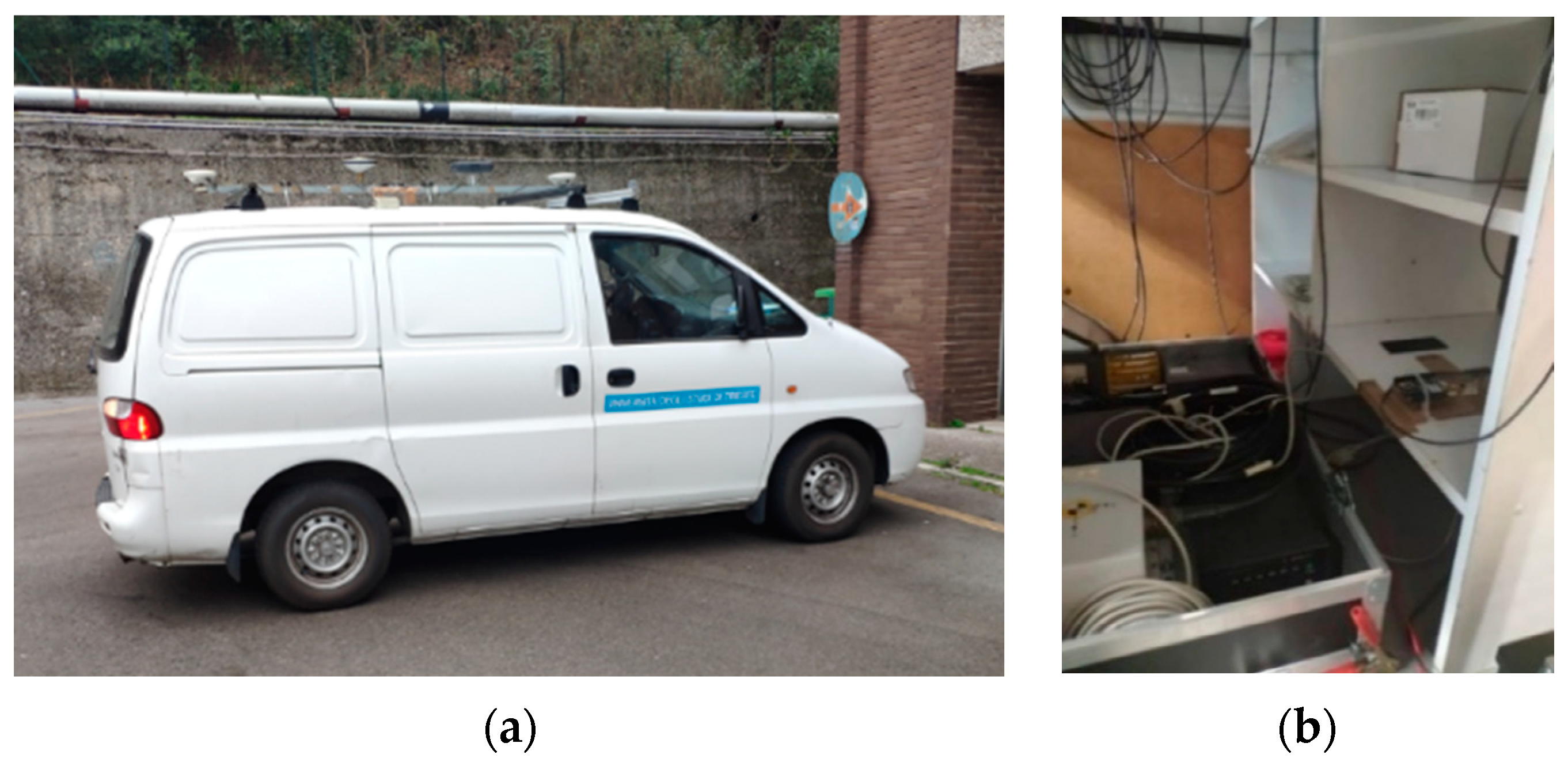
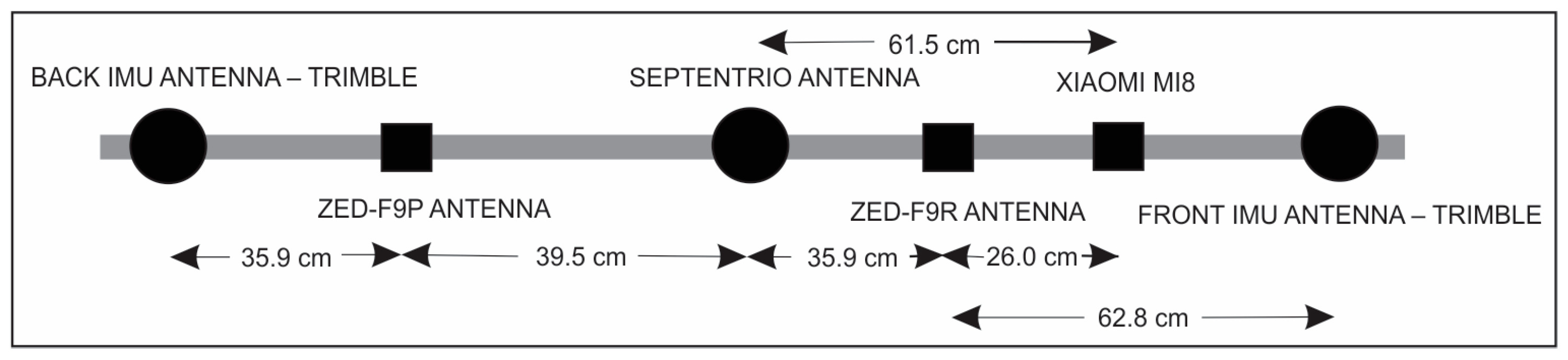
2.2. MMS POS/LV and GNSS Receivers Used in the Study
2.3. MMS POS/LV and GNSS Receivers Used in the Study
3. Data Processing
- Analysis of data quality from different receivers operating in GNSS mode;
- Reference trajectory computation from MMS measurements;
- Trajectory computation from low-cost devices, namely u-blox ZED-F9P, ZED-F9R, and Xiaomi Mi8, and Septentrio AsteRx-U professional geodetic receiver; and
- Evaluation of the performances of low-cost GNSS/INS devices compared to the professional MMS system and the Septentrio AsteRx-U geodetic receiver.
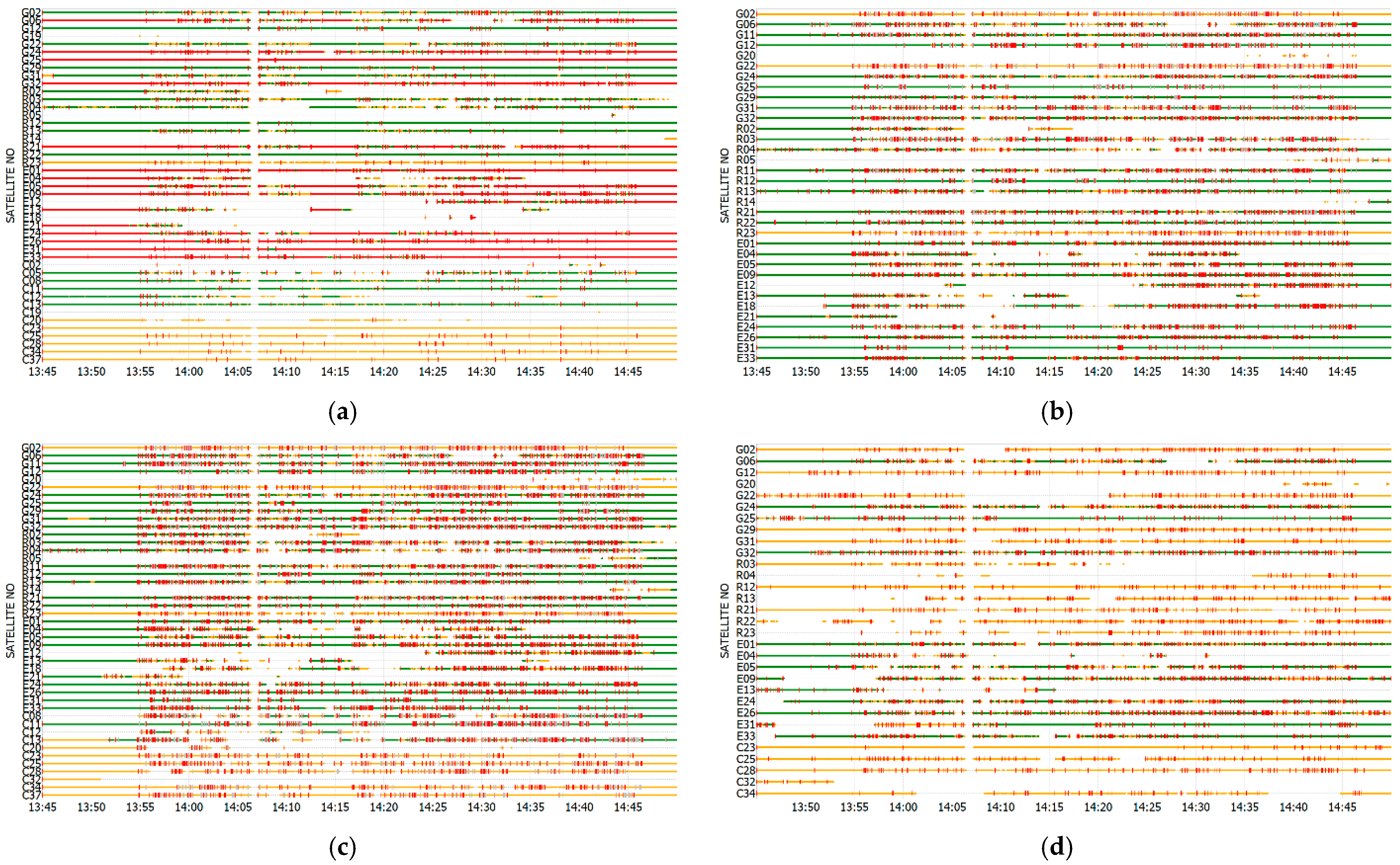
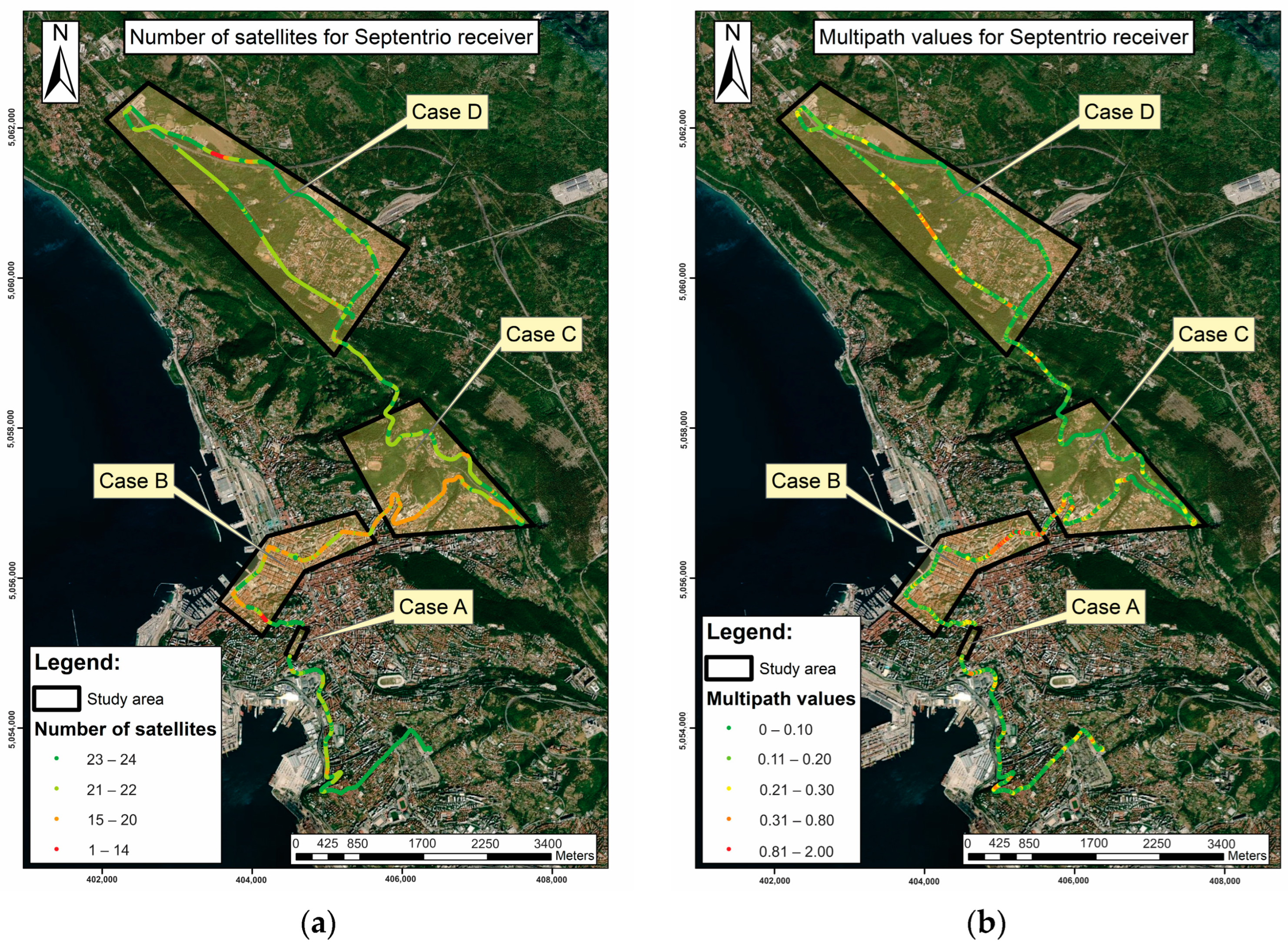
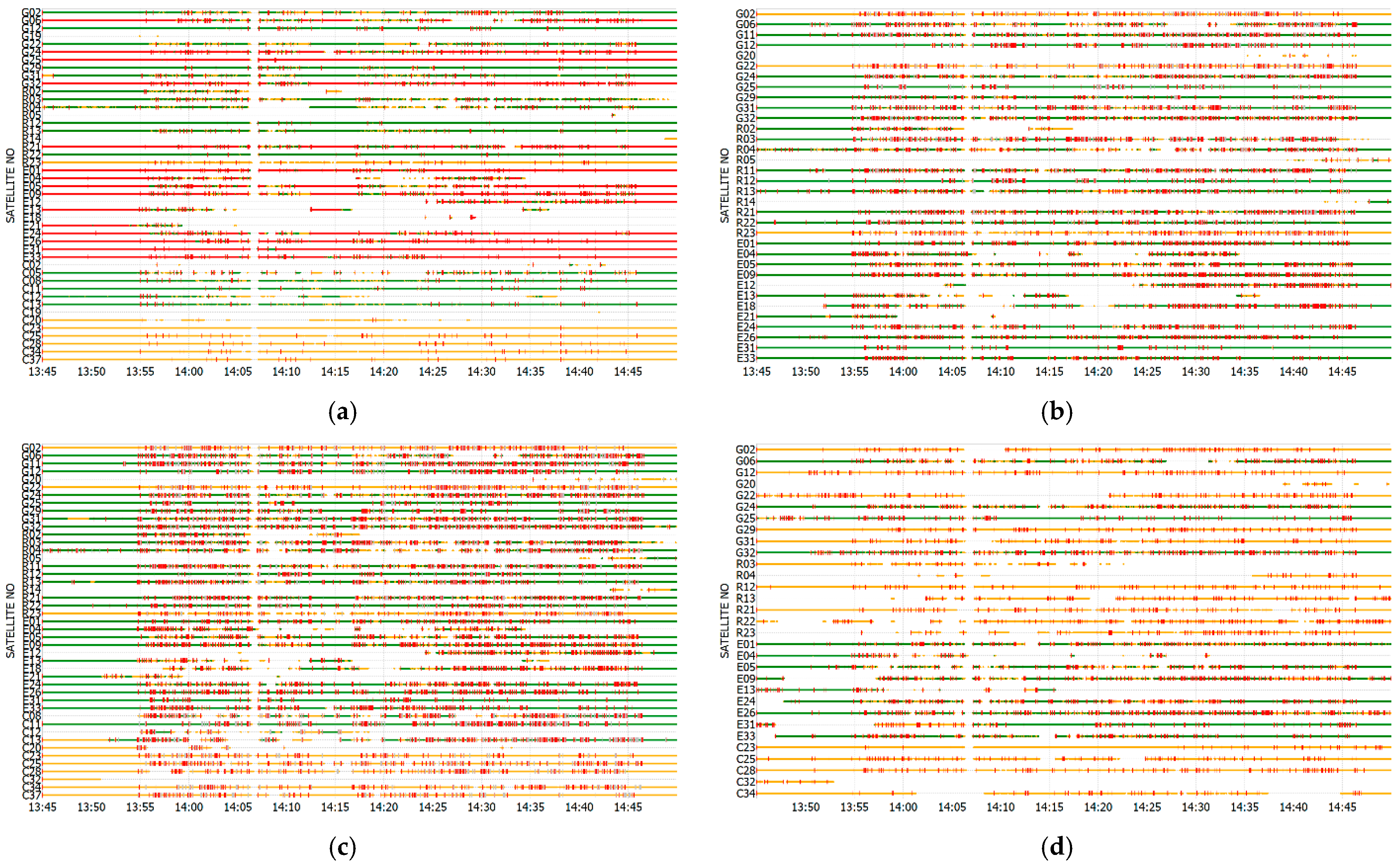
3.1. Quality of GNSS Observations
- Satellite visibility during measurements;
- Multipath; and
- Cycle slips for the received signals.
3.2. Quality of GNSS Positioning
3.3. Statistical Testing
4. Results and Discussion
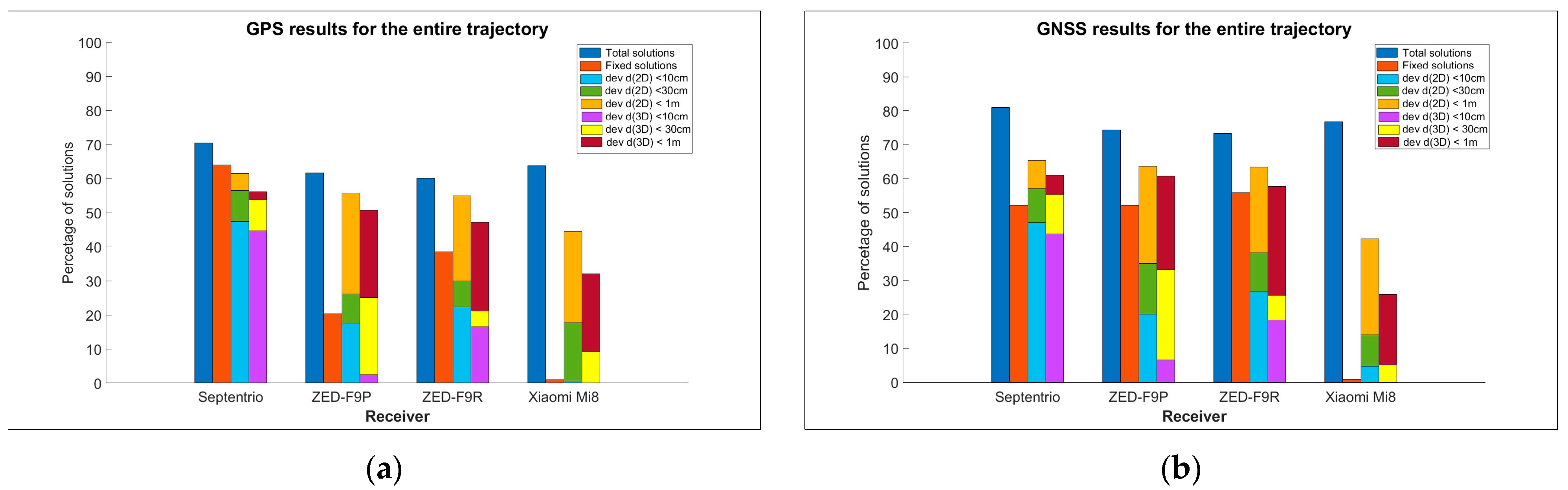
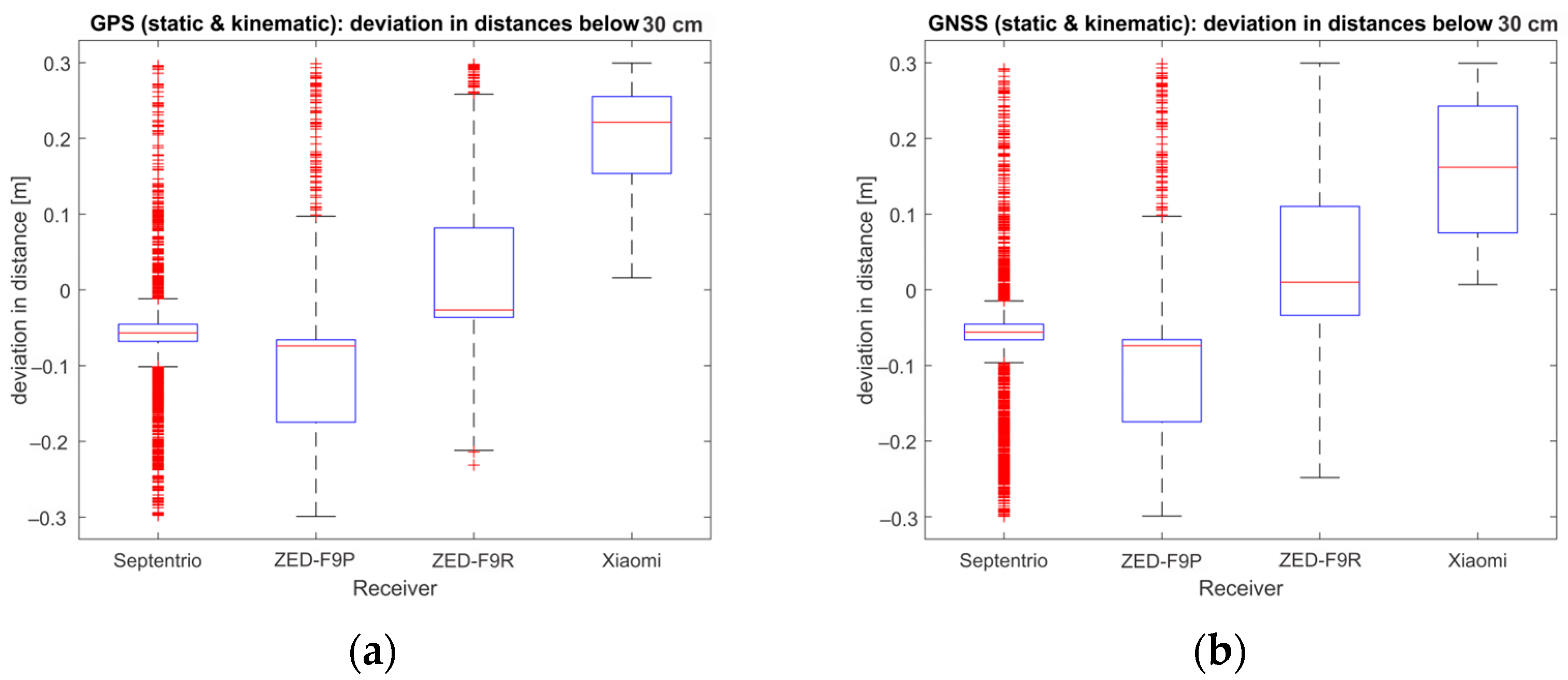
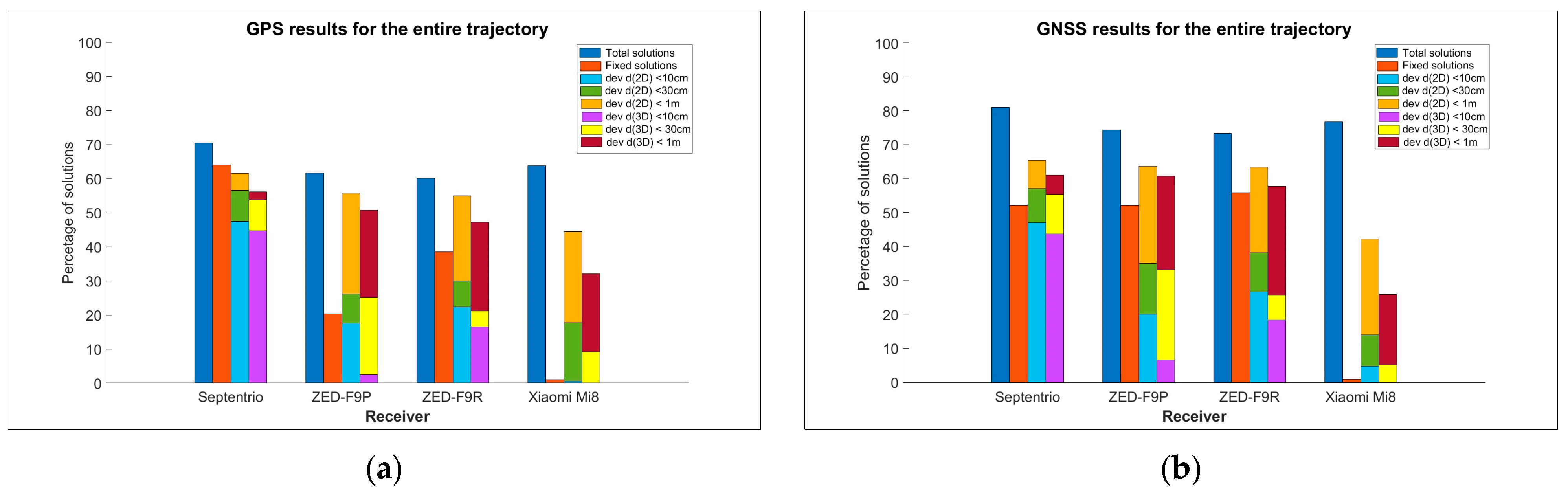
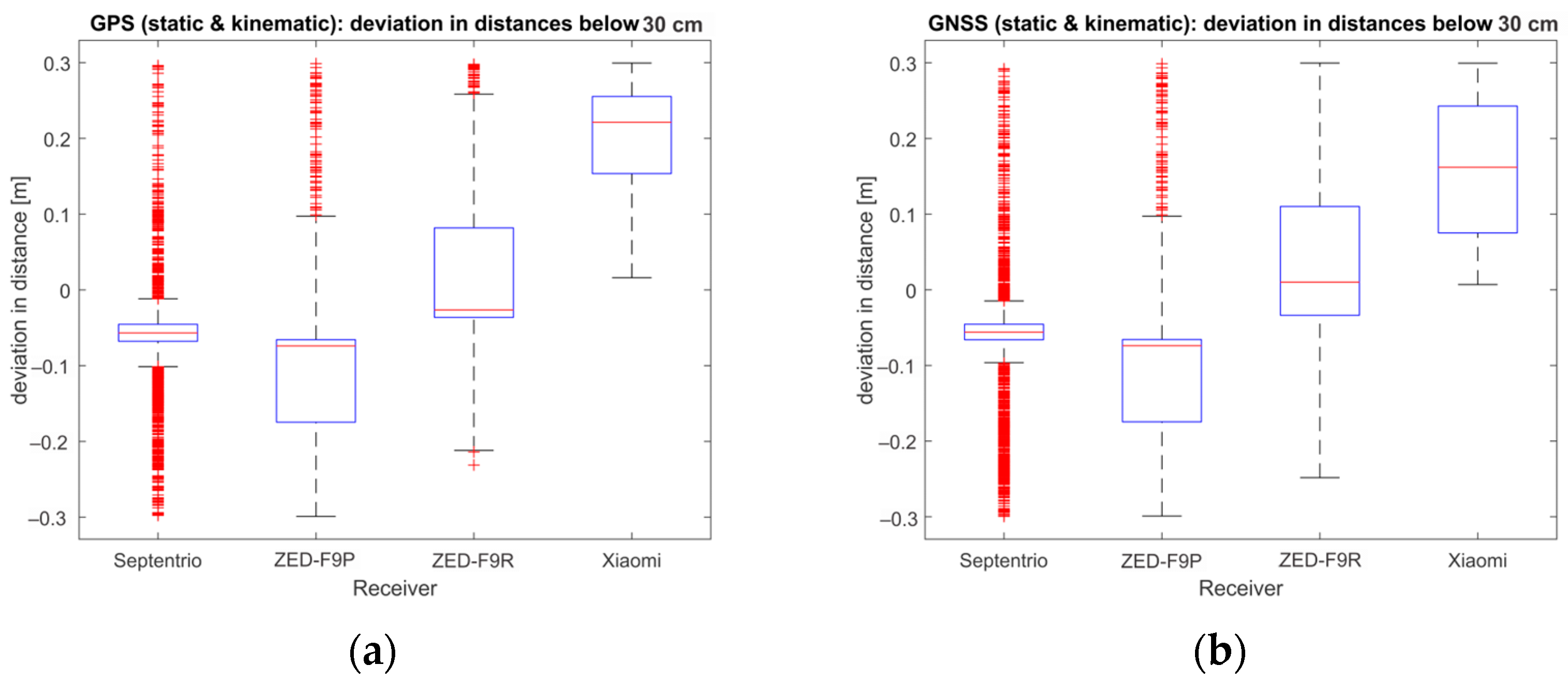
4.1. Entire Trajectory: Static and Kinematic Sessions
Results with Deviation in Distances and Heights below 30 cm
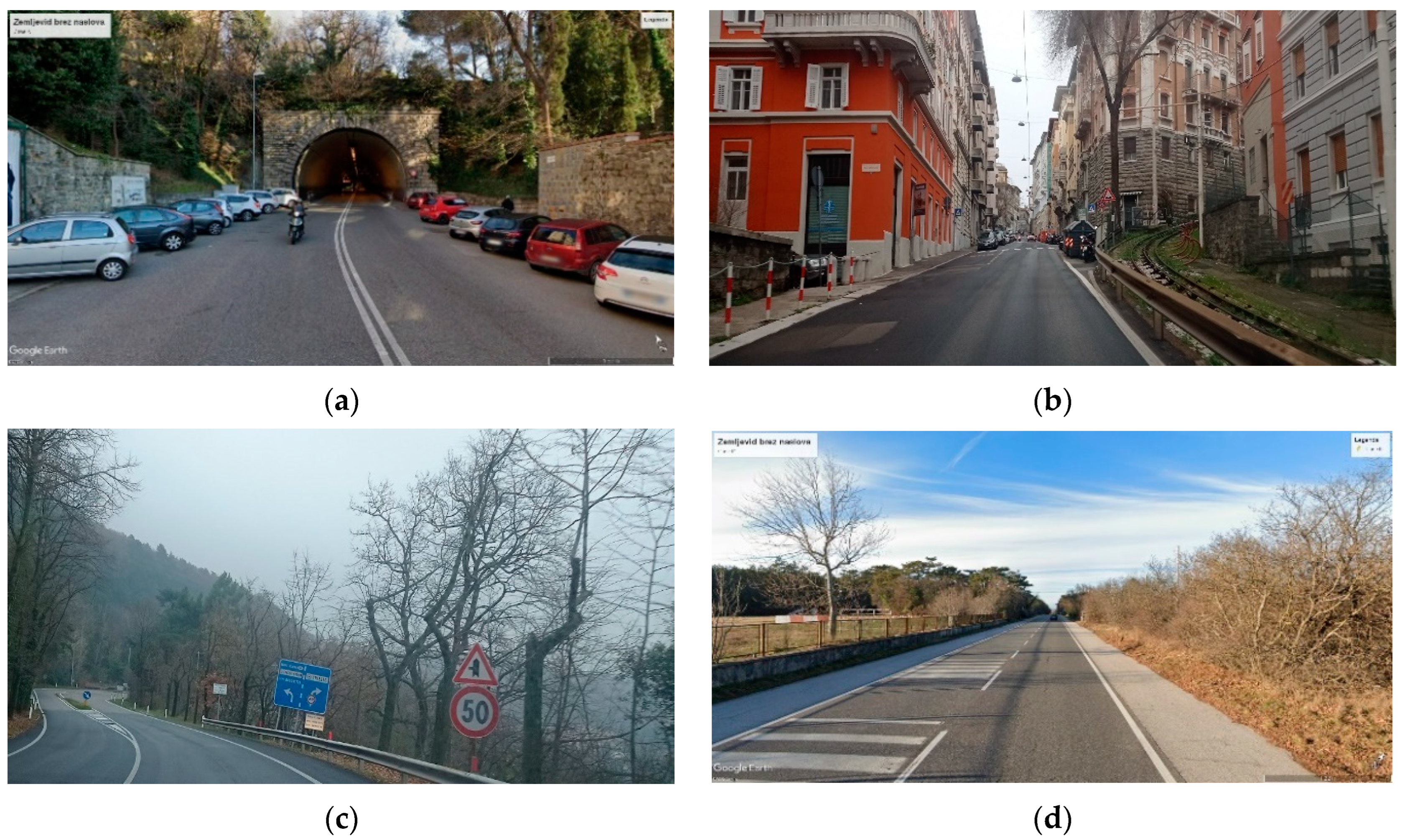
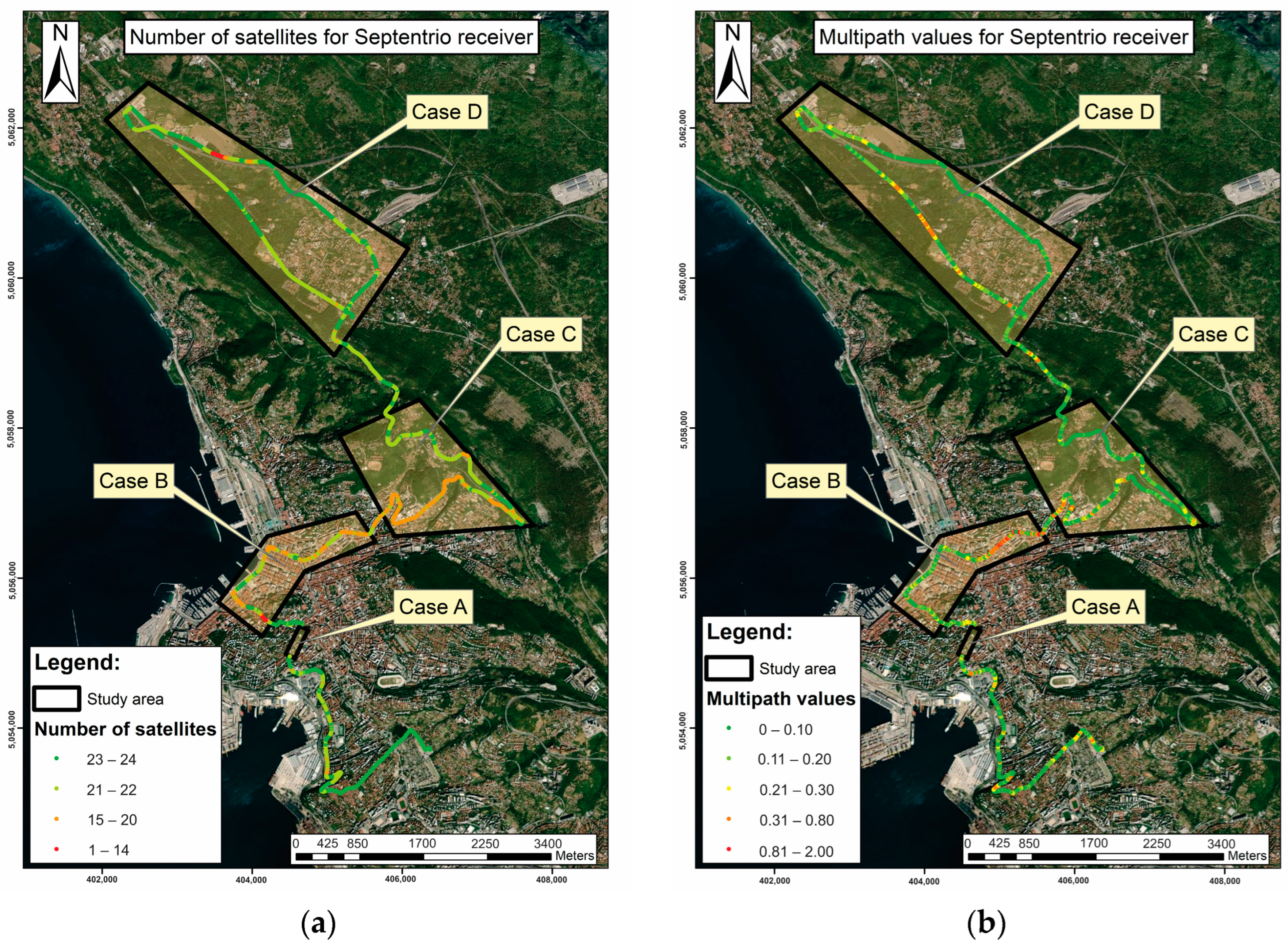
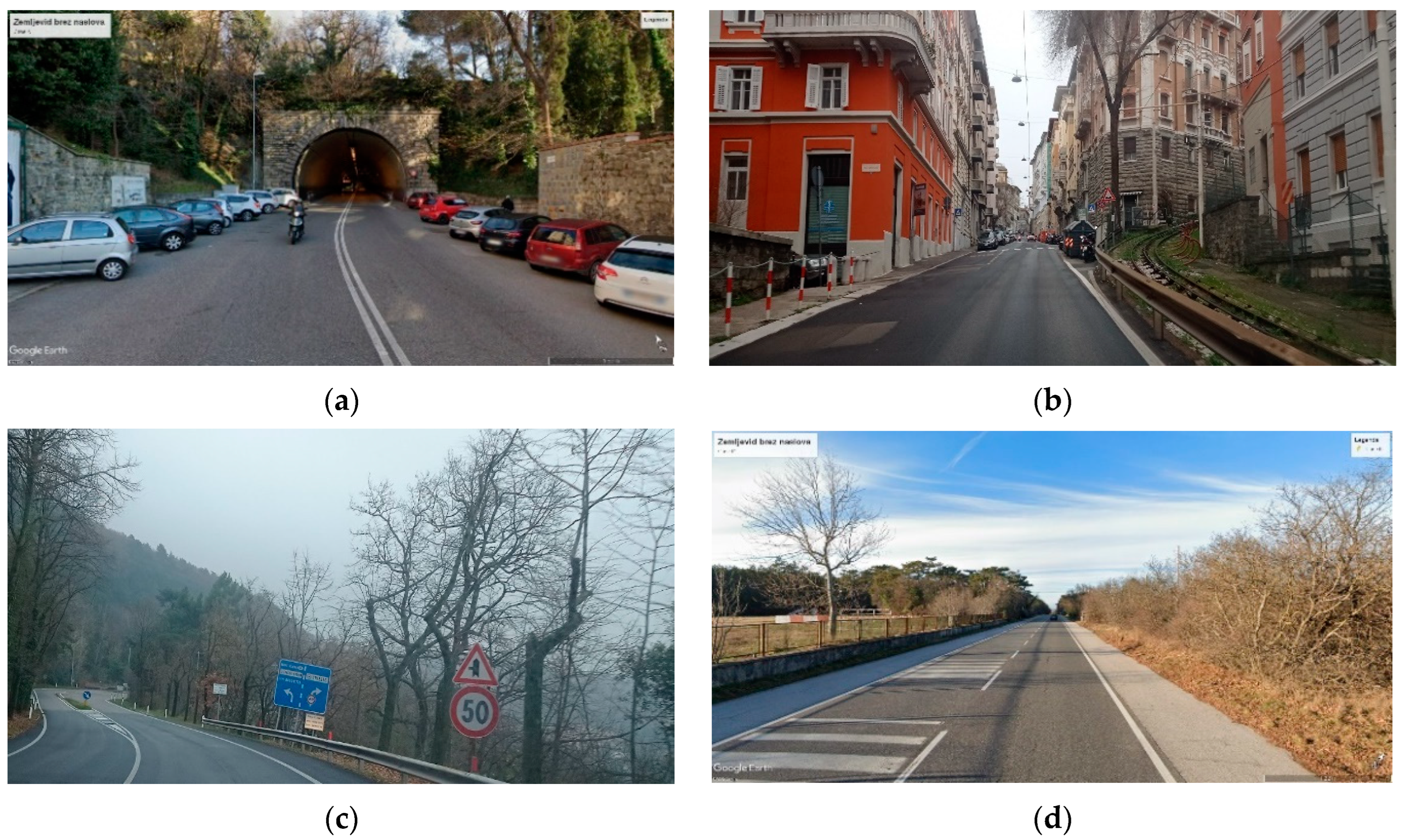
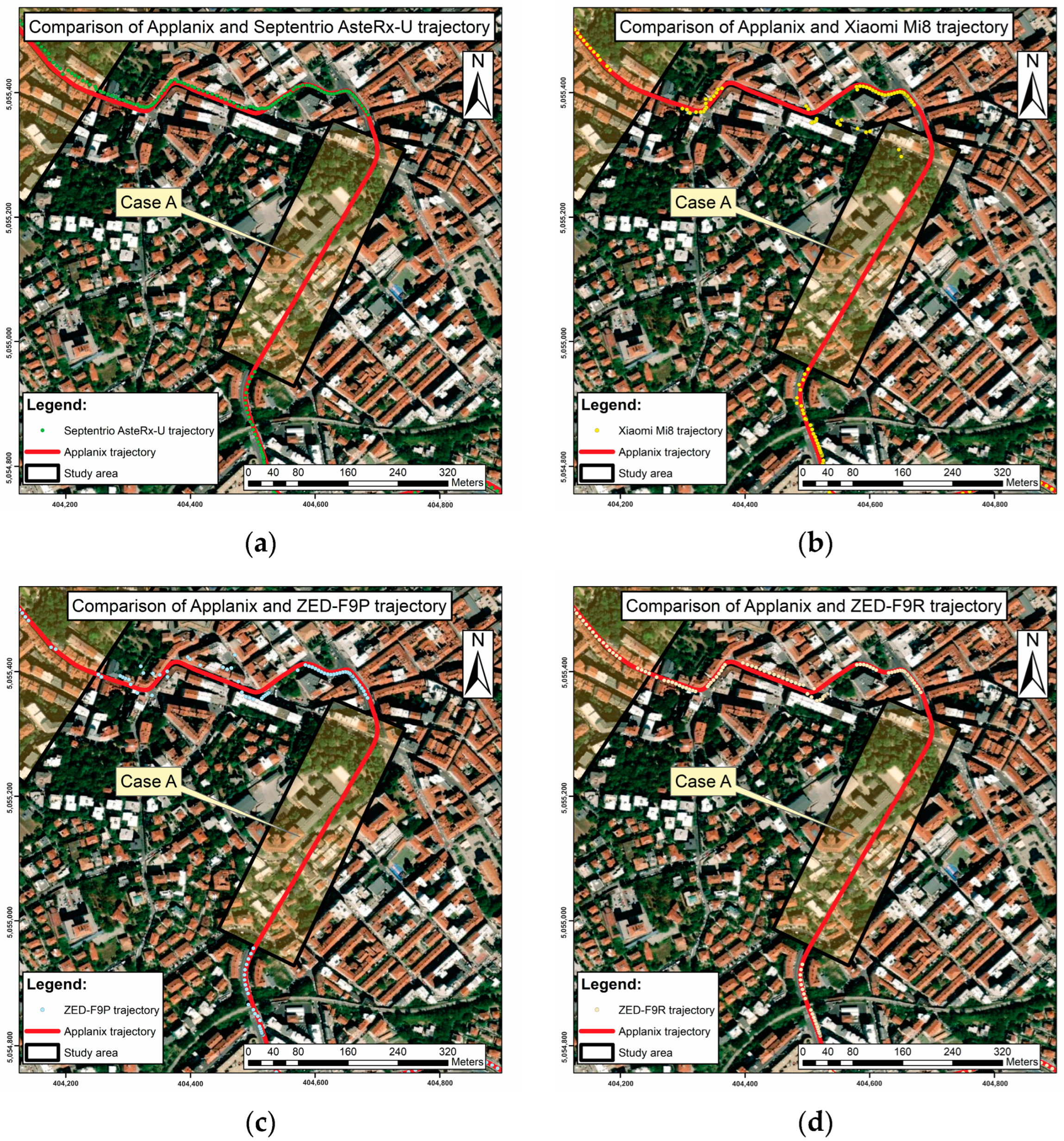
4.2. Case A—Tunnelling
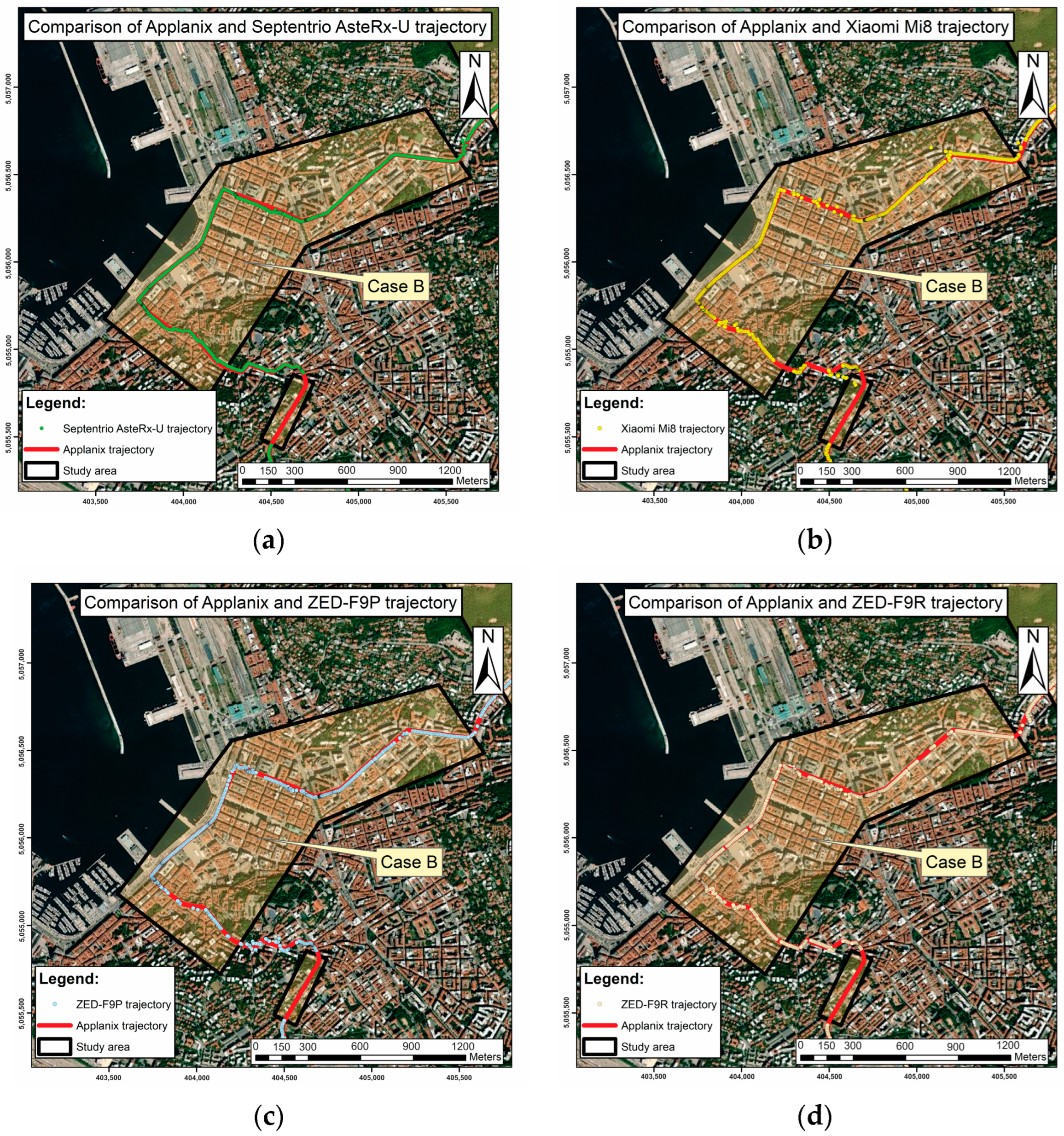
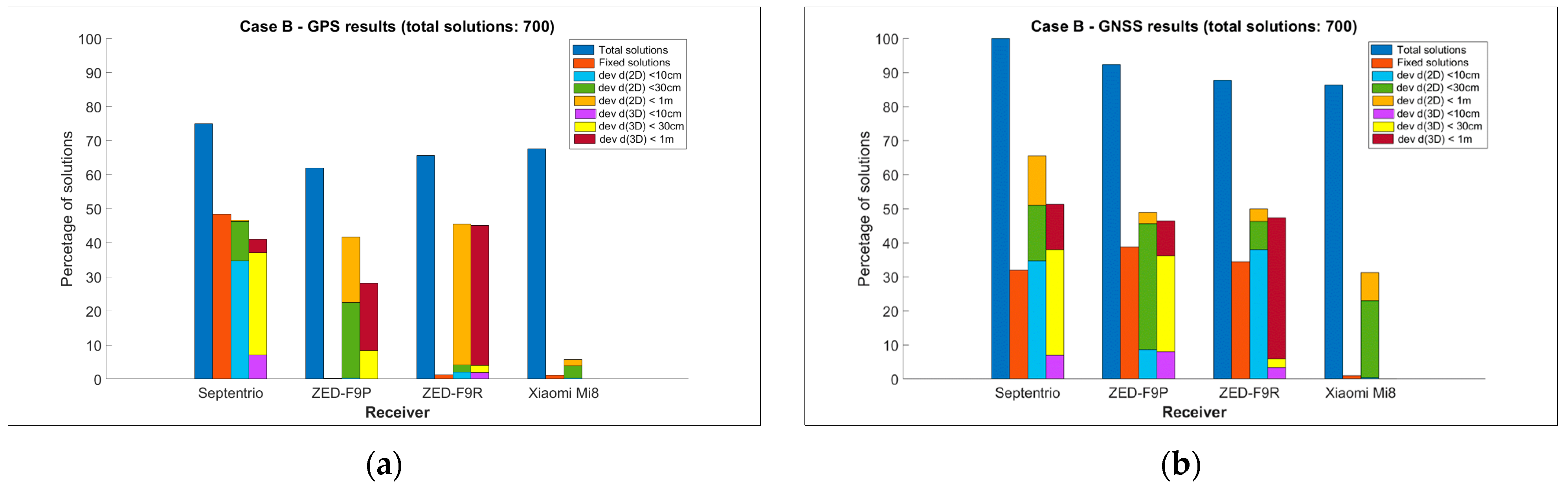
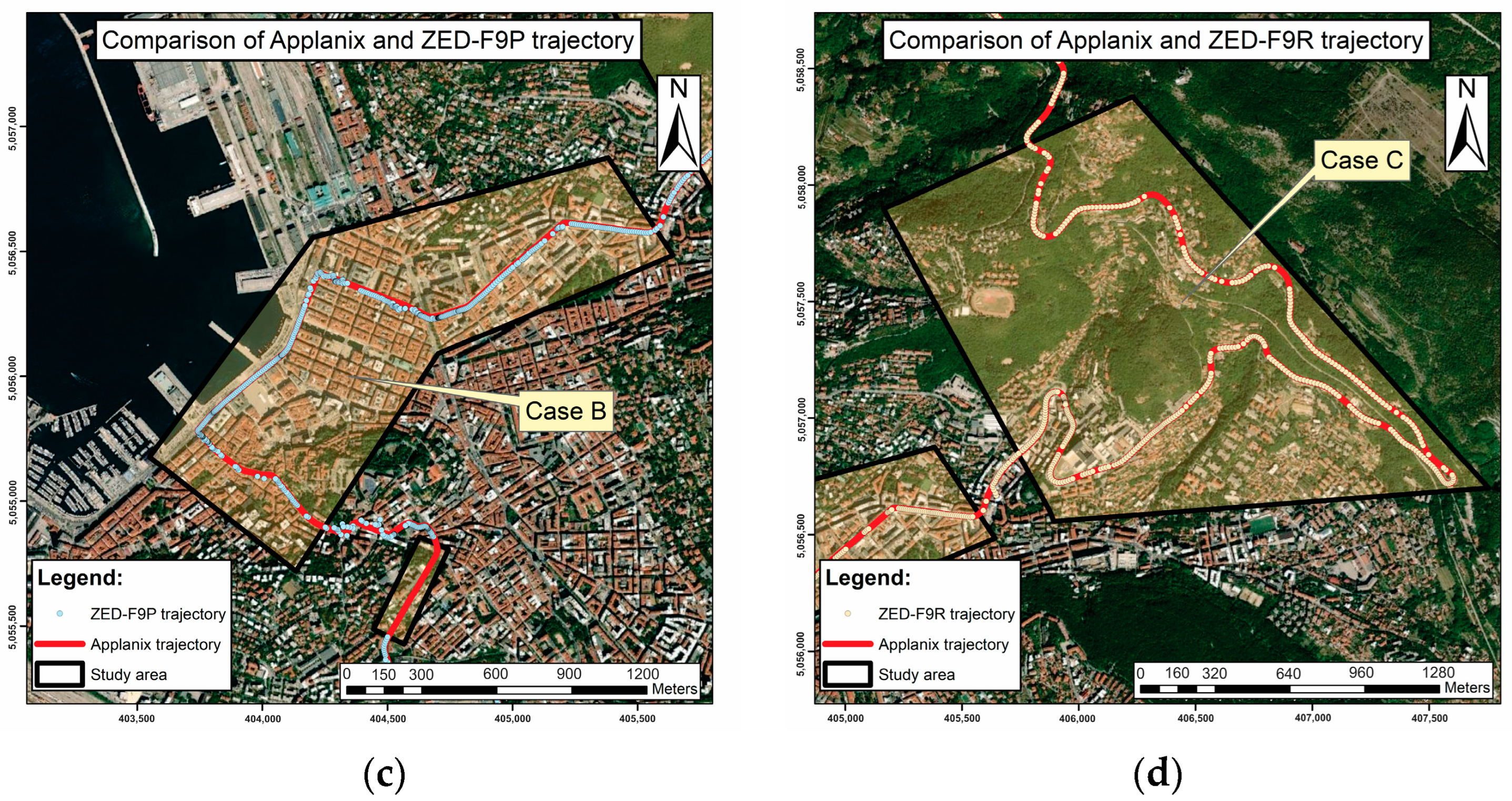
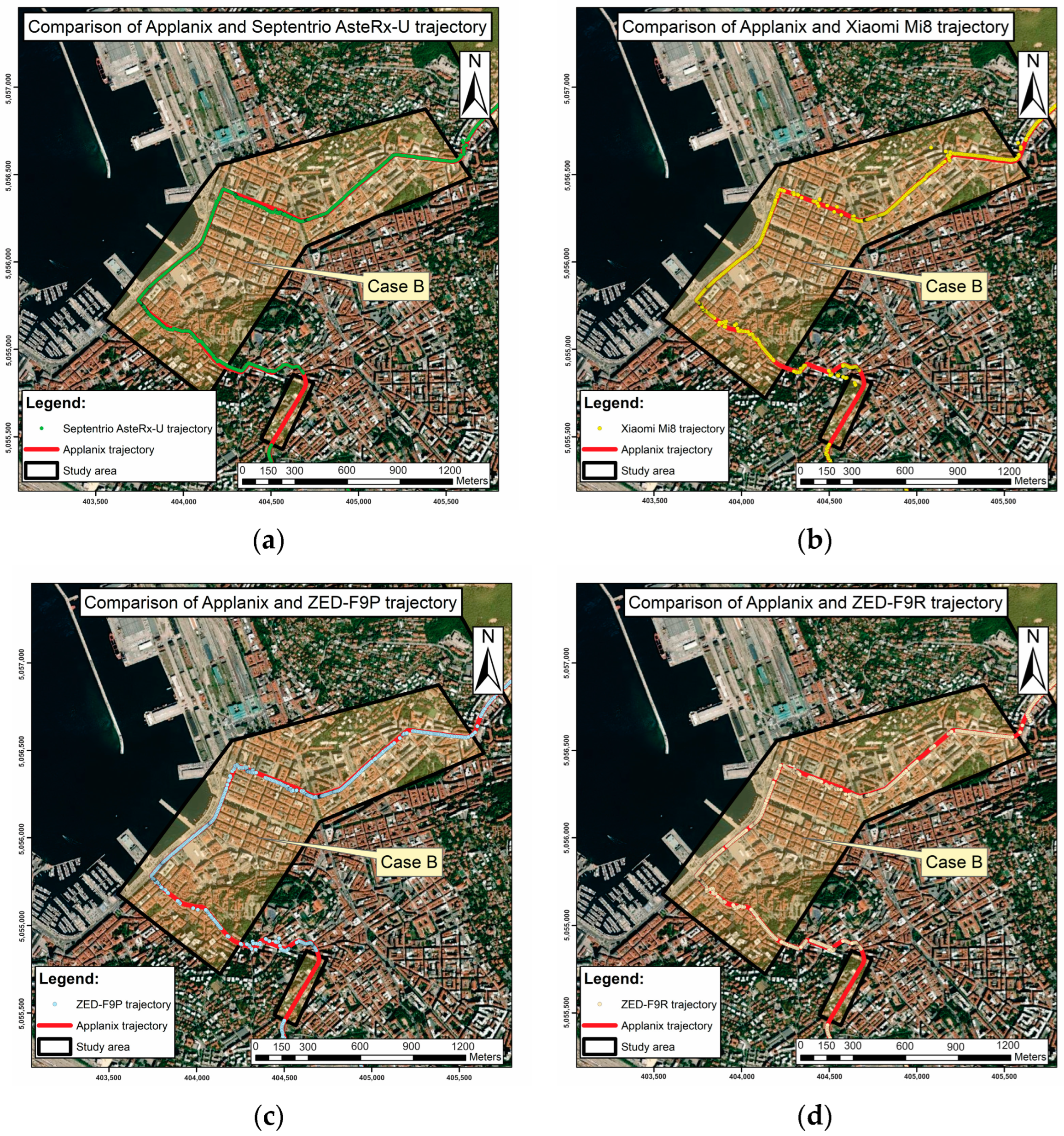
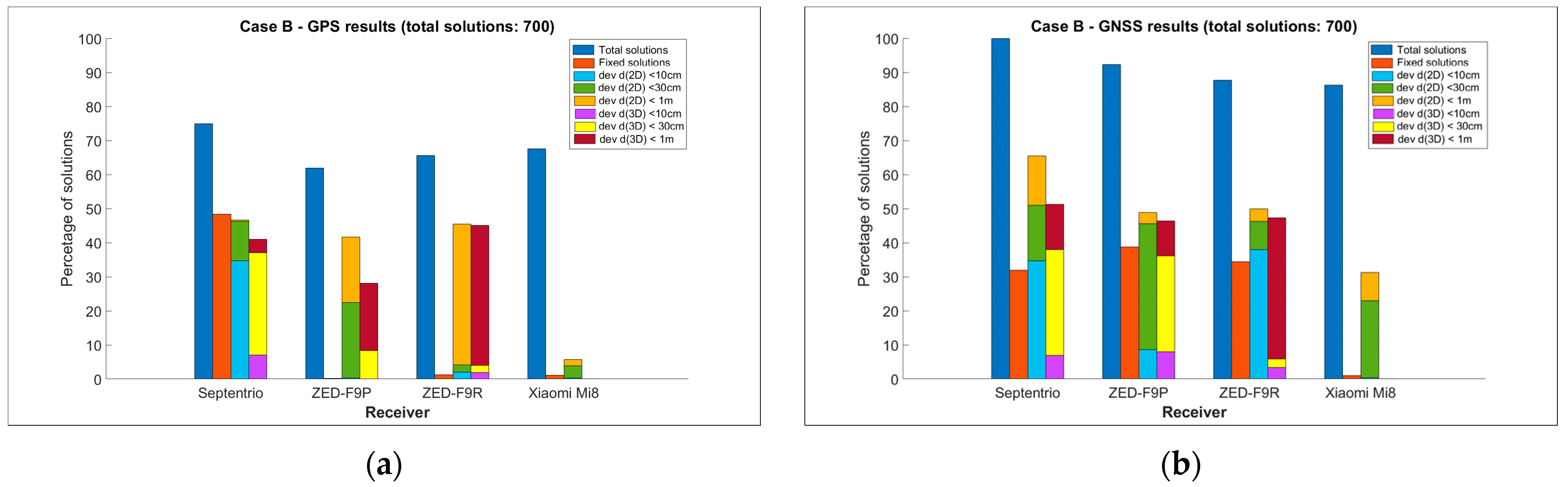
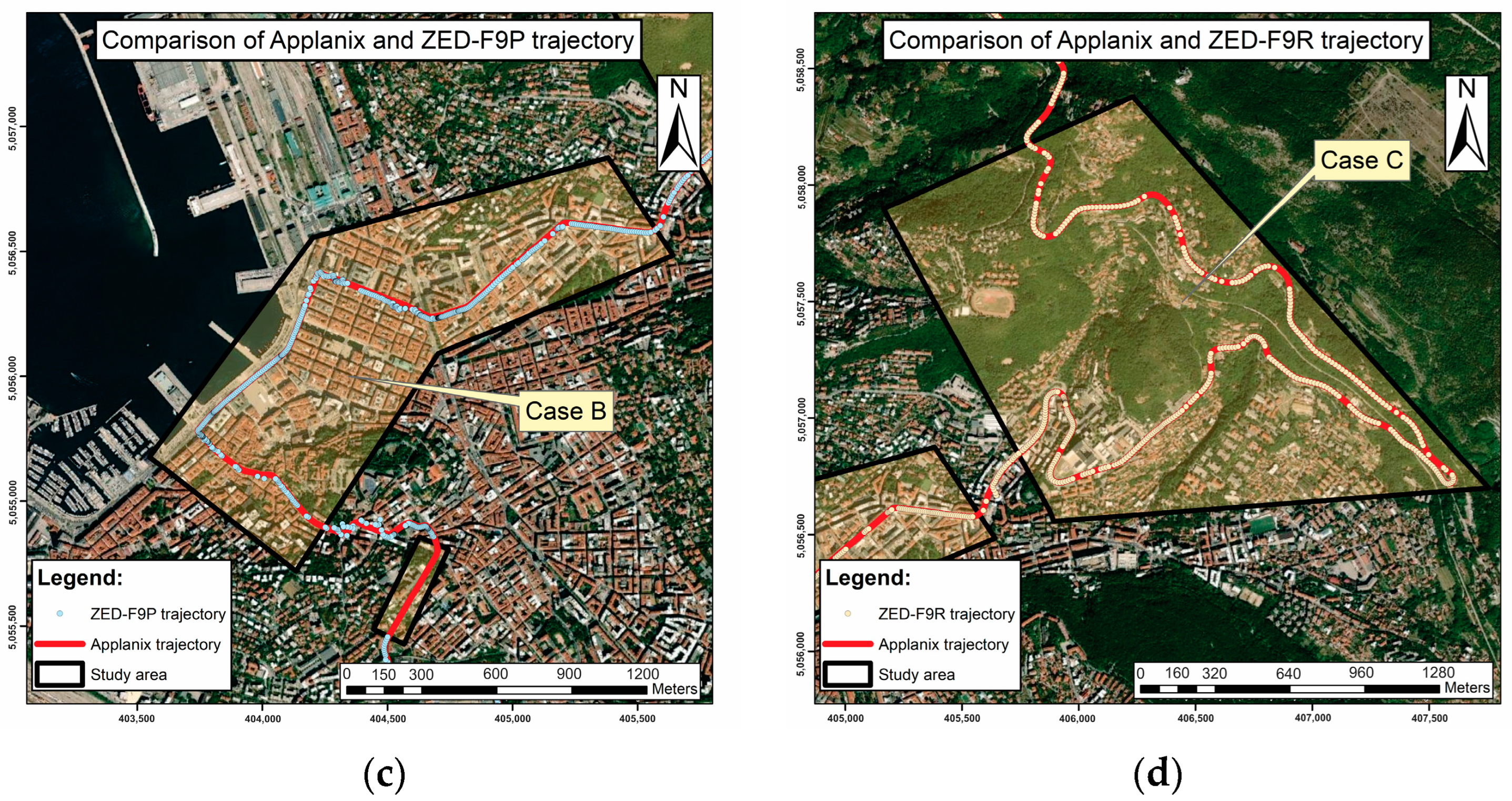
4.3. Case B—Urban Canyons
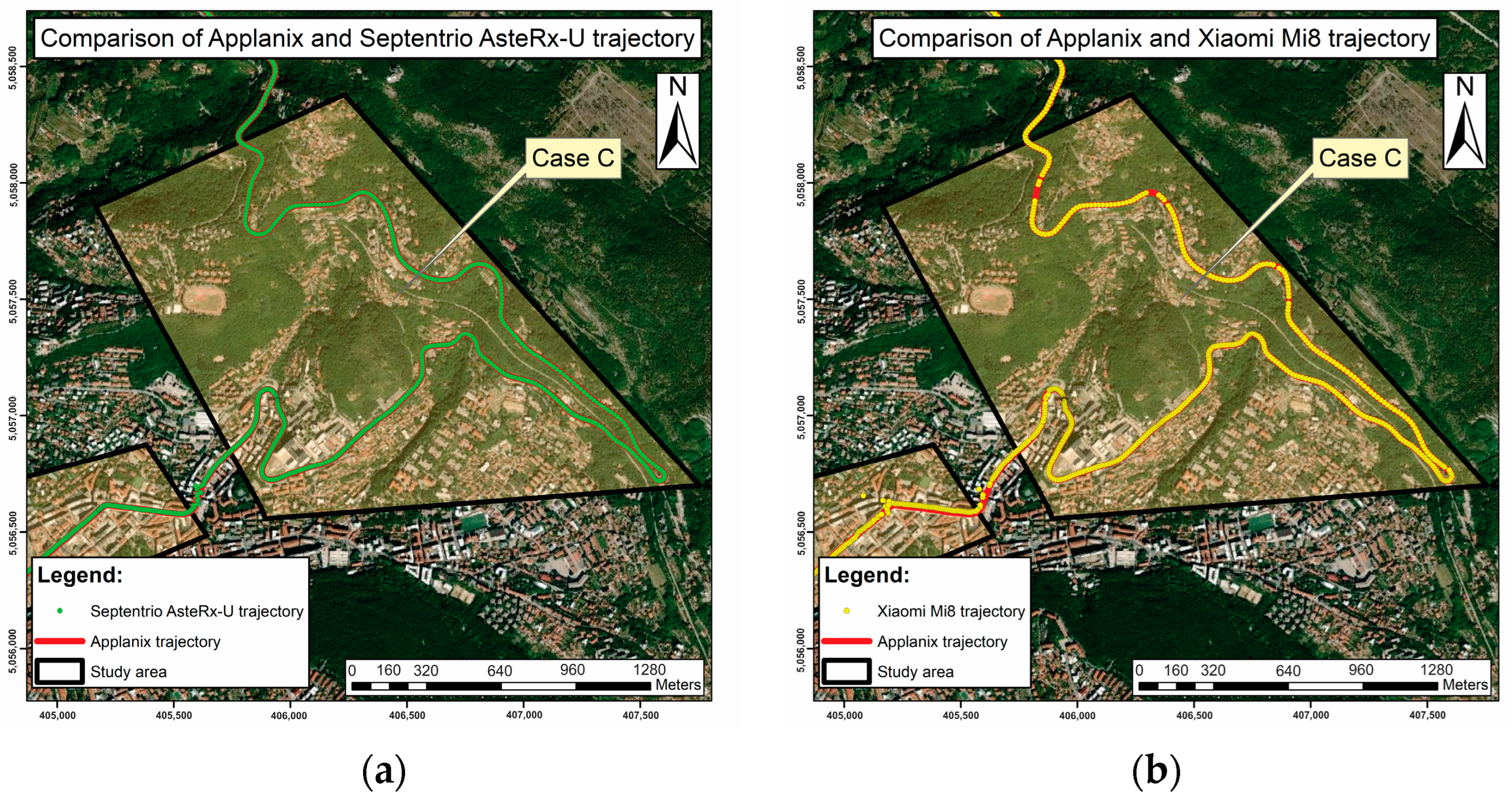
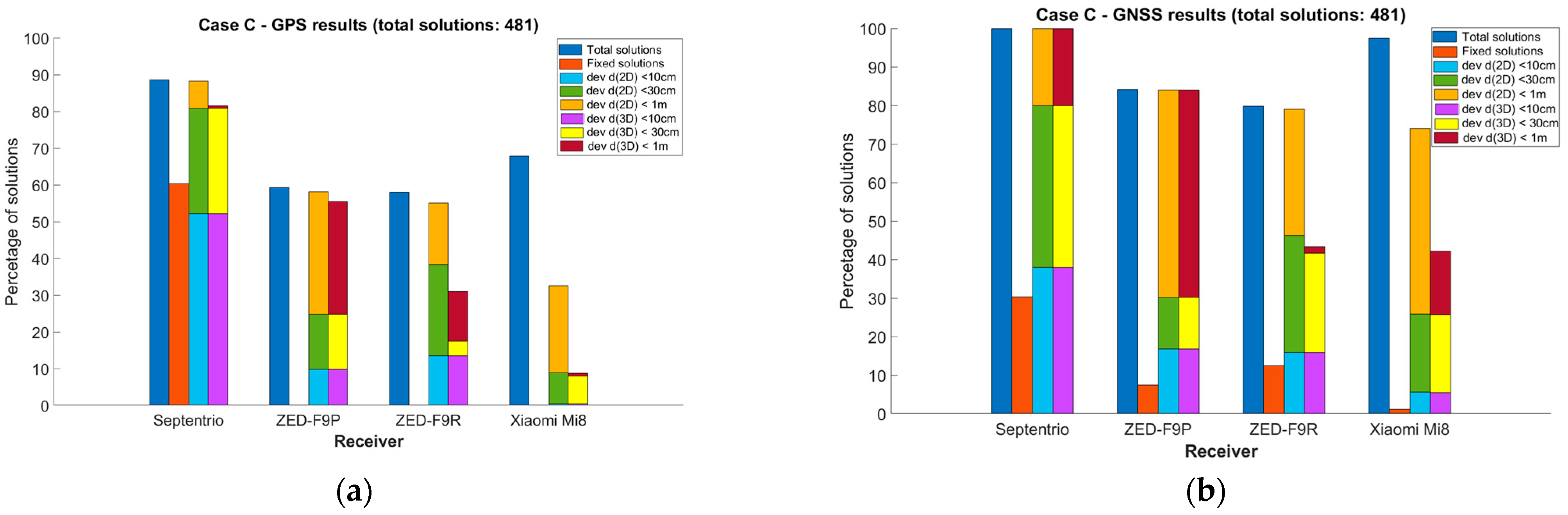
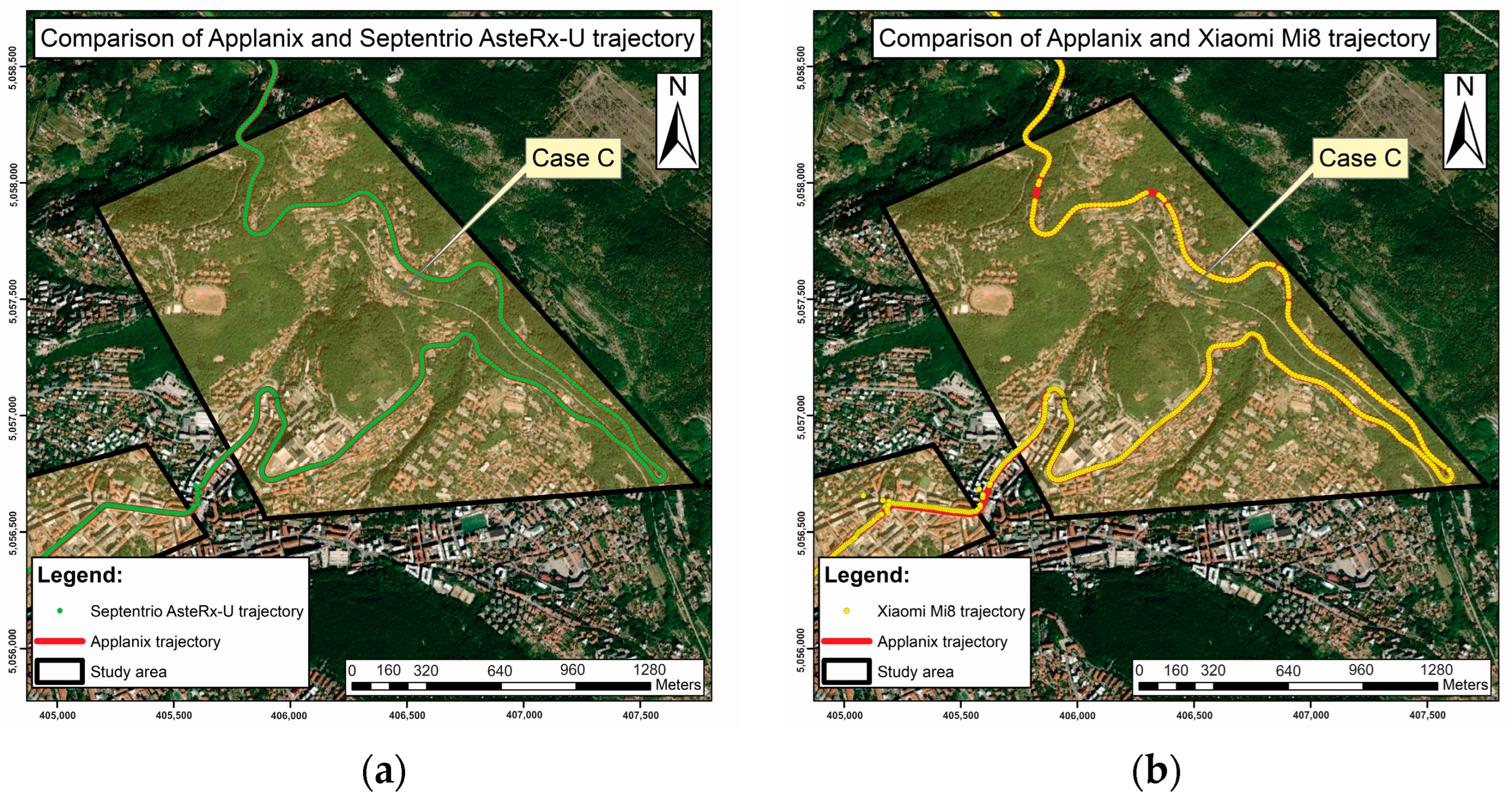
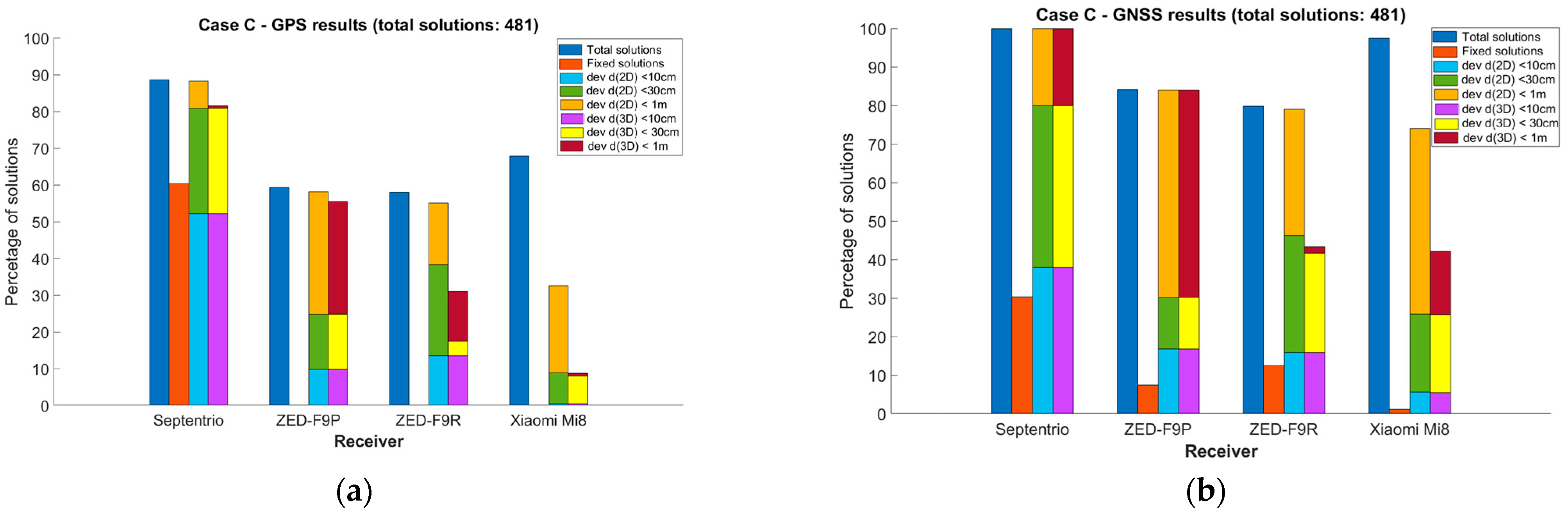
4.4. Case C—Area with Curves and Serpentines
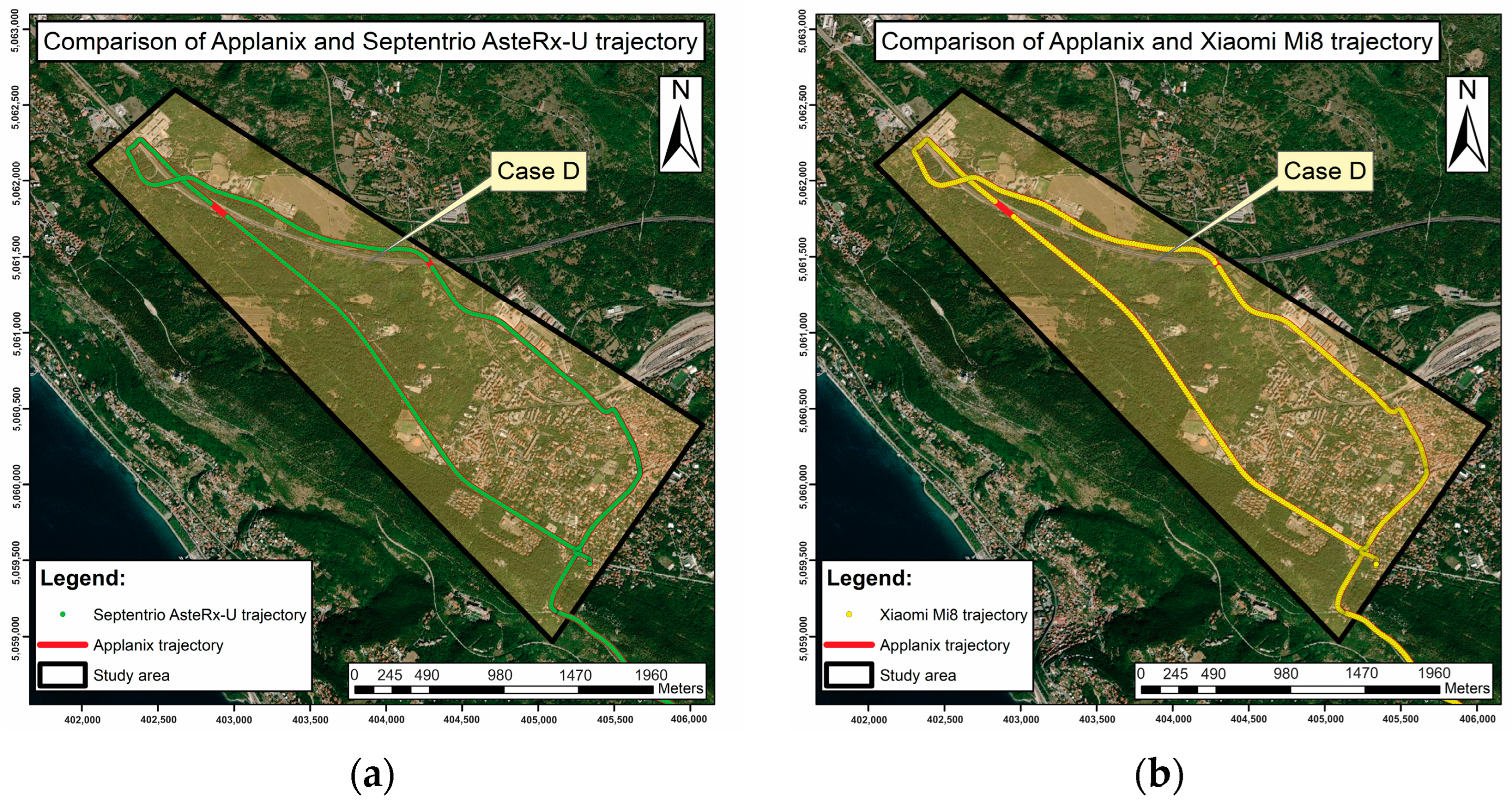
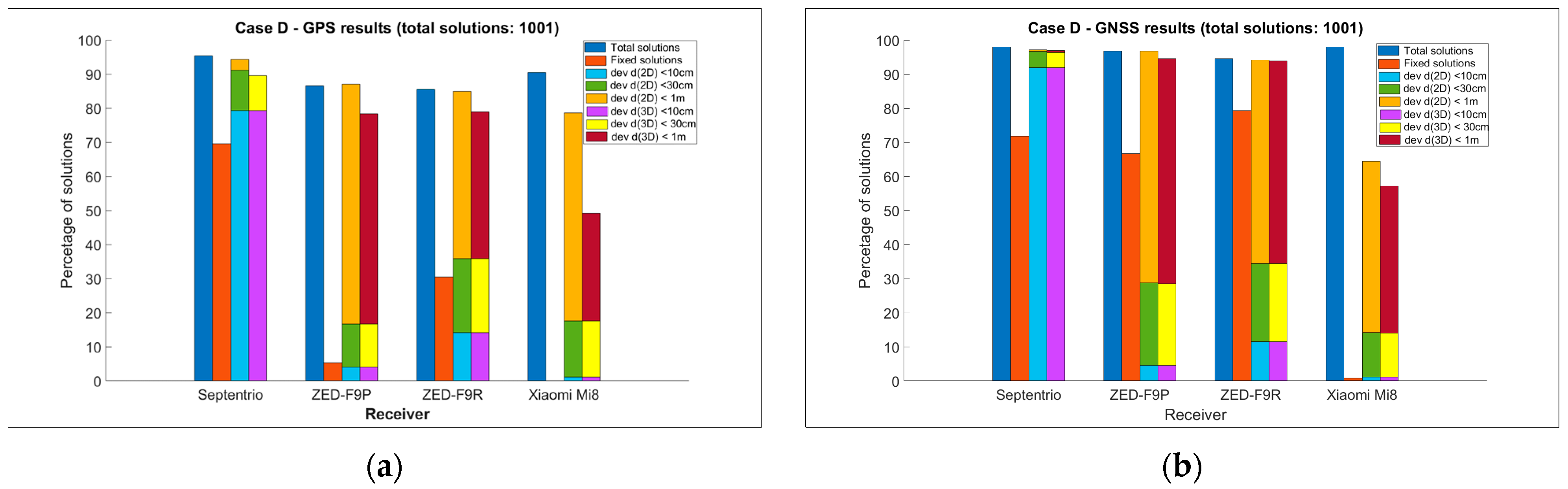
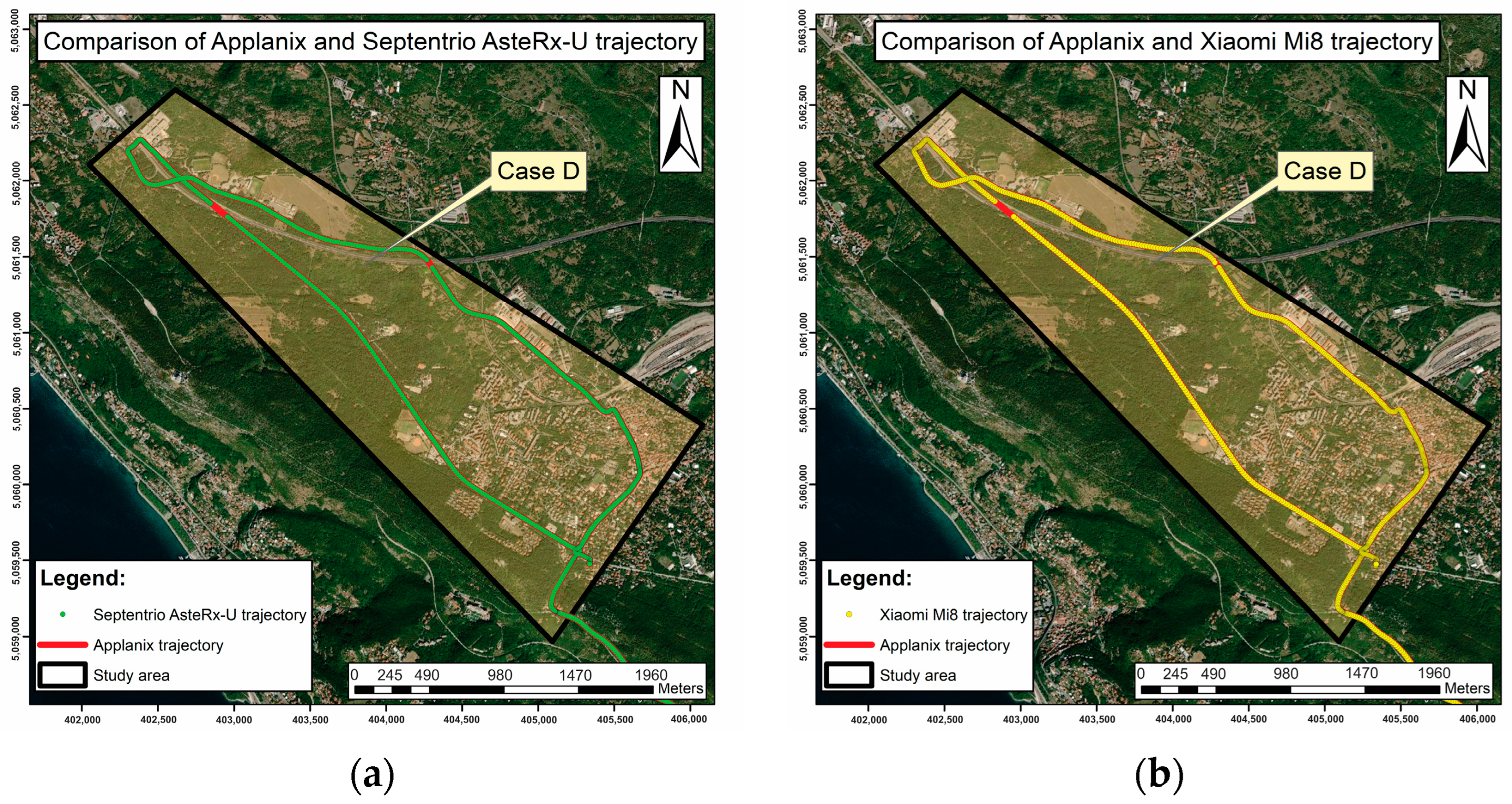
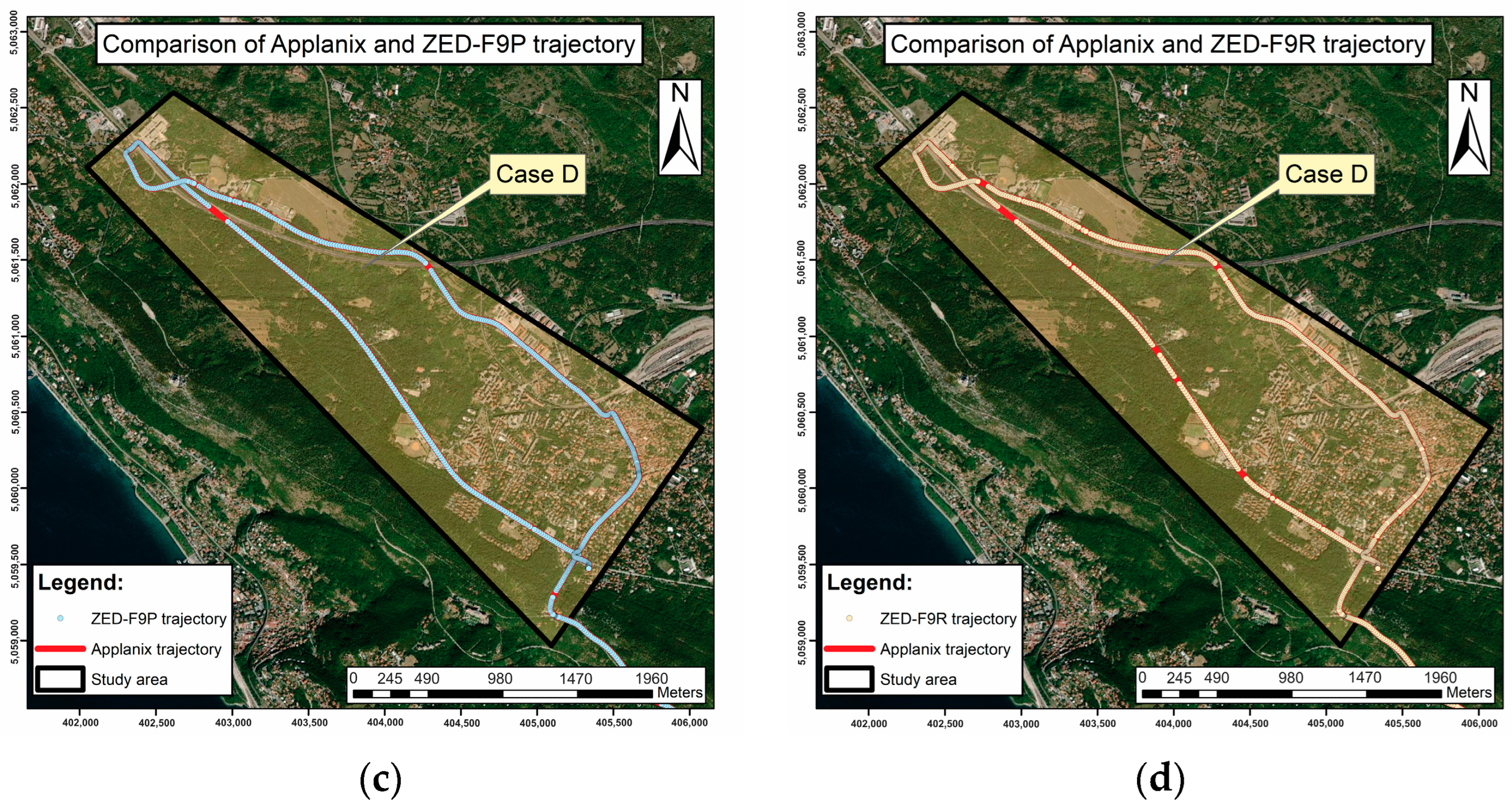
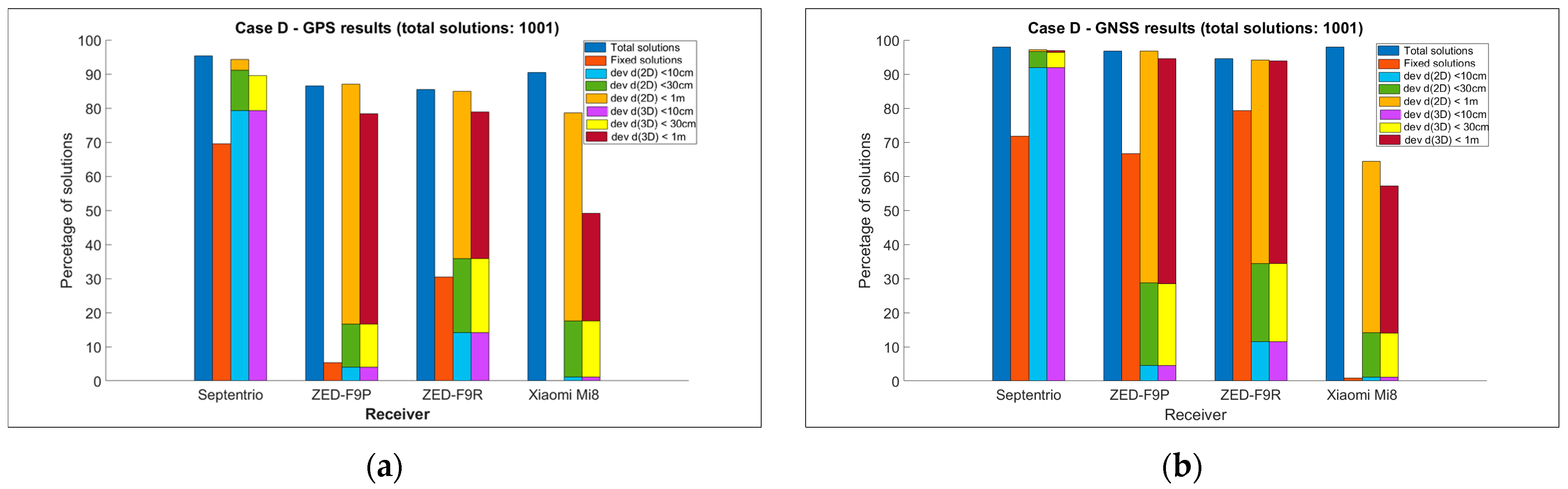
4.5. Case D—Area with Vegetation by the Roadside
5. Conclusions
- From the comparison of the GPS only and GNSS solutions for geodetic and low-cost receivers, it can be concluded that in terms of the GPS, GNSS processing achieved many more solutions for position determination and determined ambiguities in many more cases with fixed values, even if this is not true in general for the Septentrio AsteRx-U and in particular in case C: a non-urban area with curves and serpentines characterised by a reduced signal acquisition. Comparing the means and standard deviations of the deviation of the distances from the reference, it can be stated that the variances for the GPS and GNSS solutions were comparable in this case.
- There is a significant difference in quality between kinematic positioning with geodetic and low-cost receivers. The geodetic receiver is much more stable in ambiguity solutions, especially when compared to a smartphone. The same is true for solutions where the threshold for positioning quality is set at 30 cm and even more clearly at 10 cm. The differences certainly also relate to the design of the receiving antenna. The geodetic GNSS antenna enables the elimination of some multipath signals and obviously outperforms the small antenna of a smartphone and the patch antenna of the u-bloxes. Therefore, it can be said that caution should be exercised when using low-cost receivers in terrestrial measurements in urban environments, and further studies and research are required in order to eliminate observations that are loaded with effects (these can be multipaths or interferences).
- Care should also be taken when moving out of shaded areas that make GNSS positioning impossible, especially with low-cost receivers. In the future, when processing combined GNSS and INS observations in the Kalman filter for low-cost receivers, it would be useful to include the new GNSS resolution obtained from the transient in the final solution, since the solutions—especially for the low-cost receivers—deviated significantly from the Applanix reference solutions immediately after repositioning.
- In situations with many curves and manoeuvres on the road, the low-cost receivers also performed worse compared to the geodetic receiver; in these situations, they determined significantly fewer positions than the Septentrio AsteRx-U receiver. Since this portion of the trajectory may have also been affected by the poor survey conditions due to vegetation, further research is required in order to determine how the receivers respond in curves and turns in the open sky.
- In GNSS mode, the Xiaomi Mi8 smartphone performed well in situations with a threshold of less than 1 m, with the percentages varying from 50% for the urban areas to 80% for the non-urban areas, which offers potential in view of future improvements for applications in terrestrial navigation.
- The general conclusion is that even low-cost devices, especially u-blox receivers and in particular those operating in GNSS/INS mode, are suitable for kinematic terrestrial positioning; however, their use in problematic positioning areas and in urban environments with obstacles should be treated with greater caution than is the case when using professional geodetic receivers.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Groves, P.D. Shadow matching: A new GNSS positioning technique for urban canyons. J. Navig. 2011, 64, 417–430. [Google Scholar] [CrossRef]
- Ben-Moshe, B.; Elkin, E.; Levi, H.; Weissman, A. Improving accuracy of GNSS devices in urban canyons. In Proceedings of the 23rd Annual Canadian Conference on Computational Geometry, Toronto, ON, Canada, 10–12 August 2011. [Google Scholar]
- Xi, C.; Cheng-Dong, X. Performance analysis of multi-constellation GNSS in urban canyons based on fuzzy comprehensive evaluation. In Proceedings of the 29th Chinese Control And Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 3040–3045. [Google Scholar] [CrossRef]
- Fortunato, M.; Ravanelli, M.; Mazzoni, A. Real-time geophysical applications with Android GNSS raw measurements. Remote Sens. 2019, 11, 2113. [Google Scholar] [CrossRef]
- Magalhães, A.; Bastos, L.; Maia, D.; Gonçalves, J.A. Relative positioning in remote areas using a gnss dual frequency smartphone. Sensors 2021, 21, 8354. [Google Scholar] [CrossRef]
- Angrisano, A.; Gaglione, S. Smartphone GNSS Performance in an Urban Scenario with RAIM Application. Sensors 2022, 22, 786. [Google Scholar] [CrossRef]
- Li, Y.; Cai, C.; Xu, Z. A Combined Elevation Angle and C/N0 Weighting Method for GNSS PPP on Xiaomi MI8 Smartphones. Sensors 2022, 22, 2804. [Google Scholar] [CrossRef]
- Paziewski, J.; Fortunato, M.; Mazzoni, A.; Odolinski, R. An analysis of multi-GNSS observations tracked by recent Android smartphones and smartphone-only relative positioning results. Meas. J. Int. Meas. Confed. 2021, 175, 109162. [Google Scholar] [CrossRef]
- Robustelli, U.; Paziewski, J.; Pugliano, G. Observation quality assessment and performance of GNSS standalone positioning with code pseudoranges of dual-frequency android smartphones. Sensors 2021, 21, 2125. [Google Scholar] [CrossRef]
- Bakuła, M.; Uradziński, M.; Krasuski, K. Performance of DGPS Smartphone Positioning with the Use of P(L1) vs. P(L5) Pseudorange Measurements. Remote Sens. 2022, 14, 929. [Google Scholar] [CrossRef]
- Uradziński, M.; Bakuła, M. Assessment of static positioning accuracy using low-cost smartphone GPS devices for geodetic survey points’ determination and monitoring. Appl. Sci. 2020, 10, 5308. [Google Scholar] [CrossRef]
- Rabah, M.; Basiouny, M.; Ghanem, E.; Elhadary, A. Using RTK and VRS in direct geo-referencing of the UAV imagery. NRIAG J. Astron. Geophys. 2018, 7, 220–226. [Google Scholar] [CrossRef]
- Broekman, A.; Gräbe, P.J. A low-cost, mobile real-time kinematic geolocation service for engineering and research applications. HardwareX 2021, 10, e00203. [Google Scholar] [CrossRef]
- Janos, D.; Kuras, P. Evaluation of low-cost gnss receiver under demanding conditions in rtk network mode. Sensors 2021, 21, 5552. [Google Scholar] [CrossRef]
- Van Nguyen, N.; Cho, W.; Hayashi, K. Performance evaluation of a typical low-cost multi-frequency multi-GNSS device for positioning and navigation in agriculture—Part 1: Static testing. Smart Agric. Technol. 2021, 1, 100004. [Google Scholar] [CrossRef]
- Semler, Q.; Mangin, L.; Moussaoui, A.; Semin, E. Development of a low-cost centimetric GNSS positioning solution for android applications. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2019, 42, 309–314. [Google Scholar] [CrossRef]
- Wielgocka, N.; Hadas, T.; Kaczmarek, A.; Marut, G. Feasibility of using low-cost dual-frequency gnss receivers for land surveying. Sensors 2021, 21, 1956. [Google Scholar] [CrossRef]
- Wu, Q.; Sun, M.; Zhou, C.; Zhang, P. Precise point positioning using dual-frequency GNSS observations on smartphone. Sensors 2019, 19, 2189. [Google Scholar] [CrossRef]
- Zhu, H.; Xia, L.; Wu, D.; Xia, J.; Li, Q. Study on multi-gnss precise point positioning performance with adverse effects of satellite signals on android smartphone. Sensors 2020, 20, 6447. [Google Scholar] [CrossRef]
- Benvenuto, L.; Cosso, T.; Delzanno, G. An Adaptive Algorithm for Multipath Mitigation in GNSS Positioning with Android Smartphones. Sensors 2022, 22, 5790. [Google Scholar] [CrossRef]
- Lithopoulos, E. The Applanix Approach to GPS/INS Integration. In Photogrammetric Week 1999; Fritsch, D., Spiller, R., Eds.; Wichmann Verlag: Heidelberg, Germany, 1999; pp. 53–57. [Google Scholar]
- Mostafa, M.; Hutton, J.O.E.; Reid, B.; Hill, R. GPS/IMU products—The Applanix approach. Photogramm. Week 2001, 63–82. [Google Scholar]
- Cefalo, R.; Grandi, G.; Roberti, R.; Sluga, T. Extraction of road geometric parameters from high resolution remote sensing images validated by GNSS/INS geodetic techniques. Lect. Notes Comput. Sci. 2017, 10407, 181–195. [Google Scholar] [CrossRef]
- Tarantino, E.; Novelli, A.; Cefalo, R.; Sluga, T.; Tommasi, A. Single-frequency kinematic performance comparison between Galileo, GPS, and GLONASS satellite positioning systems using an MMS-generated trajectory as a reference: Preliminary results. ISPRS Int. J. Geo-Inf. 2018, 7, 122. [Google Scholar] [CrossRef]
- Bastos, L.; Buist, P.; Cefalo, R.; Goncalves, J.A.; Ivan, A.; Magalhaes, A.; Pandele, A.; Porretta, M.; Radutu, A.; Sluga, T.; et al. Kinematic Galileo and GPS Performances in Aerial, Terrestrial, and Maritime Environments. Remote Sens. 2022, 14, 3414. [Google Scholar] [CrossRef]
- Sanna, G.; Pisanu, T.; Garau, S. Behavior of Low-Cost Receivers in Base-Rover Configuration with Geodetic-Grade Antennas. Sensors 2022, 22, 2779. [Google Scholar] [CrossRef]
- Pavlovčič-Prešeren, P.; Dimc, F.; Bažec, M. A comparative analysis of the response of GNSS receivers under vertical and horizontal L1/E1 chirp jamming. Sensors 2021, 21, 1446. [Google Scholar] [CrossRef]
- Bažec, M.; Dimc, F.; Pavlovčič-Prešeren, P. Evaluating the vulnerability of several geodetic GNSS receivers under chirp signal L1/E1 Jamming. Sensors 2020, 20, 814. [Google Scholar] [CrossRef]
- Dimc, F.; Pavlovčič Prešeren, P.; Bažec, M. Robustness against Chirp Signal Interference of On-Board Vehicle Geodetic and Low-Cost GNSS Receivers. Sensors 2021, 21, 5257. [Google Scholar] [CrossRef]
- Robustelli, U.; Baiocchi, V.; Pugliano, G. Assessment of dual frequency GNSS observations from a Xiaomi Mi 8 android smartphone and positioning performance analysis. Electron. 2019, 8, 91. [Google Scholar] [CrossRef]
- European Global Navigation Satellite Systems Agency (GSA). White Paper on Using GNSS Raw Measurements on Android Devices; EUSPA: Prague, Czech Republic, 2017; ISBN 9789292060336.
- Gao, C.; Chen, B.; Lui, Y.; Sun, P. Real-time Precise Point Positioning with a Xiaomi MI 8 Android Smartphone. Sensors 2019, 19, 2835. [Google Scholar]
- Fortunato, M. GMV NSL-Testing the Dual Frequency GNSS Smartphone. Available online: https://gmvnsl.com/about-nsl/nsl-blog/15-products-and-services/55-xiaomi-mi8 (accessed on 29 September 2022).
- Guo, L.; Wang, F.; Sang, J.; Lin, X.; Gong, X.; Zhang, W. Characteristics analysis of raw multi-GNSS measurement from Xiaomi Mi 8 and positioning performance improvement with L5/E5 frequency in an urban environment. Remote Sens. 2020, 12, 744. [Google Scholar] [CrossRef]
- Shinghal, G.; Bisnath, S. Conditioning and PPP processing of smartphone GNSS measurements in realistic environments. Satell. Navig. 2021, 2, 10. [Google Scholar] [CrossRef]
- Wu, D.; Xiong, W.; Guo, J. Establishment and Repetition Survey of Primary GNSS Control Network of Hong Kong–Zhuhai–Macao Bridge. J. Surv. Eng. 2022, 148, 05021006. [Google Scholar] [CrossRef]
- Elmezayen, A.; El-Rabbany, A. Precise point positioning using world’s first dual-frequency GPS/galileo smartphone. Sensors 2019, 19, 2593. [Google Scholar] [CrossRef]
- Zhang, X.; Tao, X.; Zhu, F.; Shi, X.; Wang, F. Quality assessment of GNSS observations from an Android N smartphone and positioning performance analysis using time-differenced filtering approach. GPS Solut. 2018, 22, 70. [Google Scholar] [CrossRef]
- Liu, W.; Shi, X.; Zhu, F.; Tao, X.; Wang, F. Quality analysis of multi-GNSS raw observations and a velocity-aided positioning approach based on smartphones. Adv. Sp. Res. 2019, 63, 2358–2377. [Google Scholar] [CrossRef]
- Banville, S.; Lachapelle, G.; Ghoddousi-Fard, R.; Gratton, P. Automated processing of low-cost GNSS receiver data. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2019), Miami, FL, USA, 16–20 September 2019; pp. 3636–3652. [Google Scholar] [CrossRef]
- Paziewski, J.; Sieradzki, R.; Baryla, R. Signal characterization and assessment of code GNSS positioning with low-power consumption smartphones. GPS Solut. 2019, 23, 1–12. [Google Scholar] [CrossRef]
- Li, Z.; Wang, L.; Wang, N.; Li, R.; Liu, A. Real-time GNSS precise point positioning with smartphones for vehicle navigation. Satell. Navig. 2022, 3, 19. [Google Scholar] [CrossRef]
- Everett, T.; Taylor, T.; Lee, D.K.; Akos, D.M. Optimizing the Use of RTKLIB for Smartphone-Based GNSS Measurements. Sensors 2022, 22, 3825. [Google Scholar] [CrossRef]
- U-Center. Available online: https://www.u-blox.com/en/product/u-center (accessed on 12 December 2021).
- Applanix Corporation. PUBS-MAN-001768-POSPacTM MMSTM GNSS-Inertial Tools Software, Version 7.2; Revision 12—User Guide; Applanix Corporation: Richmond Hill, ON, Canada, 2016. [Google Scholar]
- Rete GNSS FVG—A. Marussi. Available online: https://rem.regione.fvg.it/ (accessed on 11 February 2022).
- Takasu, T. RTKLIB: An Open source program package for RTK-GPS. Available online: http://rtklib.com/ (accessed on 4 December 2020).
- Everett, T. RTKLIB Demo5_b34d. Available online: https://rtkexplorer.com/downloads/rtklib-code/ (accessed on 5 May 2022).
- Netthonglang, C.; Thongtan, T.; Satirapod, C. GNSS Precise Positioning Determinations Using Smartphones. In Proceedings of the 2019 IEEE Asia Pacific Conference on Circuits and Systems (APCCAS), Bangkok, Thailand, 11–14 November 2019; pp. 401–404. [Google Scholar] [CrossRef]
- Retscher, G.; Weigert, T. Assessment of a dual-frequency multi-GNSS smartphone for surveying applications. Appl. Geomatics 2022, 14, 765–784. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | RTKLIB |
|---|---|
| Constellations | GPS/GPS + GLONASS + Galileo |
| Observations | code and carrier phase (L1/E1 + L2/E5b + L5/E5a) |
| Ambiguity | fix-and-hold/continuous |
| Ephemeris | broadcast |
| Elevation angle | 15° |
| Ionospheric delay | iono-free (LC) |
| Tropospheric delay | Saastamoinen |
| Type of GNSS Device | ||||
|---|---|---|---|---|
| Parameters | Septentrio AsteRx-U | u-blox ZED-F9P | u-blox ZED-F9R | Smartphone Xiaomi Mi8 |
| RMSE for multipath L1 (m) | 0.3554 | 0.5129 | 0.4848 | 0.7394 |
| RMSE for multipath L2 (m) | 0.4320 | 0.5292 | 0.5581 | - |
| RMSE for multipath L5 (m) | 0.3313 | - | - | 0.5515 |
| Type of GNSS Device | ||||
|---|---|---|---|---|
| Parameters | Septentrio AsteRx-U | u-blox ZED-F9P | u-blox ZED-F9R | Smartphone Xiaomi Mi8 |
| GPS solutions | 3628 (70.5%) | 3174 (61.7%) | 3125 (60.1%) | 3286 (63.8%) |
| Fixed ambiguities | 2320 (64.0%) | 644 (20.3%) | 1204 (38.5%) | 33 (1.0%) |
| < 1 m | 3168 (61.5%) | 2869 (55.7%) | 2832 (55.0%) | 2287 (44.4%) |
| < 30 cm | 2907 (56.5%) | 1344 (26.1%) | 1537 (29.9%) | 912 (17.7%) |
| < 10 cm | 2443 (47.5%) | 906 (17.6%) | 1146 (22.3%) | 31 (0.6%) |
| < 1 m | 2889 (56.1%) | 2611 (50.7%) | 2428 (47.2%) | 1651 (32.1%) |
| < 30 cm | 2712 (53.7%) | 1294 (25.1%) | 1085 (21.1%) | 473 (9.2%) |
| < 10 cm | 2300 (44.7%) | 130 (2.5%) | 849 (16.5%) | 0 (0%) |
| Type of GNSS Device | ||||
|---|---|---|---|---|
| Parameters | Septentrio AsteRx-U | u-blox ZED-F9P | u-blox ZED-F9R | Smartphone Xiaomi Mi8 |
| GNSS solutions | 4171 (81.0%) | 3831 (74.4%) | 3764 (73.1%) | 3951 (76.8%) |
| Fixed ambiguities | 2176 (52.2%) | 1995 (52.1%) | 2095 (55.7%) | 30 (0.8%) |
| < 1 m | 3369 (65.4%) | 3279 (63.7%) | 3264 (63.4%) | 2177 (42.3%) |
| < 30 cm | 2940 (57.1%) | 1798 (34.9%) | 1963 (38.1%) | 719 (14.0%) |
| < 10 cm | 2420 (47.0%) | 1032 (20.0%) | 1370 (26.6%) | 243 (4.7%) |
| < 1 m | 3123 (60.7%) | 2215 (60.7%) | 2814 (54.7%) | 1326 (25.8%) |
| < 30 cm | 2832 (55.0%) | 1702 (33.1%) | 1318 (25.6%) | 261 (5.1%) |
| < 10 cm | 2233 (43.4%) | 335 (6.5%) | 943 (18.3%) | 0 (0.0%) |
| Type of GNSS Device | ||||
|---|---|---|---|---|
| Parameters | Septentrio AsteRx-U | u-blox ZED-F9P | u-blox ZED-F9R | Smartphone Xiaomi Mi8 |
| GPS solutions | 2443 (47.5%) | 1344 (26.1%) | 1537 (29.9%) | 912 (17.8%) |
| (m) | −0.058 | −0.095 | 0.026 | 0.207 |
| (m) | 0.065 | 0.097 | 0.101 | 0.061 |
| (m) | 0.087 | 0.135 | 0.105 | 0.215 |
| (m) | −0.016 | −0.165 | 0.058 | 0.251 |
| (m) | 0.087 | 0.100 | 0.082 | 0.027 |
| (m) | 0.089 | 0.193 | 0.100 | 0.252 |
| Type of GNSS Device | ||||
|---|---|---|---|---|
| Parameters | Septentrio AsteRx-U | u-blox ZED-F9P | u-blox ZED-F9R | Smartphone Xiaomi Mi8 |
| GNSS solutions | 2940 (57.1%) | 1798 (34.9%) | 1963 (38.1%) | 719 (14.0%) |
| (m) | −0.060 | −0.100 | 0.047 | 0.159 |
| (m) | 0.084 | 0.095 | 0.101 | 0.181 |
| (m) | 0.100 | 0.138 | 0.111 | 0.204 |
| (m) | −0.025 | −0.112 | 0.066 | 0.229 |
| (m) | 0.098 | 0.140 | 0.083 | 0.034 |
| (m) | 0.101 | 0.179 | 0.106 | 0.231 |
| Type of GNSS Device | ||||
|---|---|---|---|---|
| Parameters | Septentrio AsteRx-U | u-blox ZED-F9P | u-blox ZED-F9R | Smartphone Xiaomi Mi8 |
| F-test (2D, 3D) | H0 cannot be rejected | H0 cannot be rejected | H0 cannot be rejected | H0 cannot be rejected |
| Type of GNSS Device | ||||
|---|---|---|---|---|
| Parameter | Septentrio AsteRx-U | u-blox ZED-F9P | u-blox ZED-F9R | Smartphone Xiaomi Mi8 |
| 5 s | 4 s | 6 s | 9 s | |
| 34.21 m | 30.22 m | 40.02 m | 57.07 m | |
| 0.79 m | 2.16 m | 0.56 m | 2.08 m | |
| Type of GNSS Device | ||||
|---|---|---|---|---|
| Parameters | Septentrio AsteRx-U | u-blox ZED-F9P | u-blox ZED-F9R | Smartphone Xiaomi Mi8 |
| GPS solutions | 525 (74.9%) | 434 (61.9%) | 460 (65.6%) | 474 (67.6%) |
| Fixed ambiguities | 253 (48.3%) | 1 (0.2%) | 6 (1.3%) | 5 (1.1%) |
| < 1 m | 326 (46.6%) | 292 (41.7%) | 318 (45.4%) | 61 (5.7%) |
| < 30 cm | 324 (46.3%) | 157 (22.4%) | 29 (4.1%) | 27 (3.9%) |
| < 10 cm | 243 (34.7%) | 2 (0.3%) | 14 (2.0%) | 2 (0.3%) |
| < 1 m | 287 (41.0%) | 197 (28.1%) | 315 (45.0%) | 0 (0%) |
| < 30 cm | 260 (37.1%) | 58 (8.3%) | 27 (3.9%) | 0 (0%) |
| < 10 cm | 49 (7.0%) | 1 (0.1%) | 13 (1.9%) | 0 (0%) |
| Type of GNSS Device | ||||
|---|---|---|---|---|
| Parameters | Septentrio AsteRx-U | u-blox ZED-F9P | u-blox ZED-F9R | Smartphone Xiaomi Mi8 |
| GNSS solutions | 700 (100%) | 647 (92.3%) | 615 (87.7%) | 605 (86.3%) |
| Fixed ambiguities | 223 (31.9%) | 238 (38.8%) | 211 (34.4%) | 6 (1.0%) |
| < 1 m | 477 (68.1%) | 342 (48.9%) | 349 (49.9%) | 348 (49.7%) |
| < 30 cm | 376 (53.7%) | 319 (45.6%) | 324 (46.3%) | 160 (22.9%) |
| < 10 cm | 262 (37.4%) | 60 (8.6%) | 265 (37.9%) | 2 (0.3%) |
| < 1 m | 361 (51.6%) | 329 (47.0%) | 331 (47.3%) | 2 (0.3%) |
| < 30 cm | 265 (37.9%) | 257 (36.7%) | 41 (5.9%) | 0 (0%) |
| < 10 cm | 48 (6.9%) | 56 (8.0%) | 24 (3.4%) | 0 (0%) |
| Type of GNSS Device | ||||
|---|---|---|---|---|
| Parameters | Septentrio AsteRx-U | u-blox ZED-F9P | u-blox ZED-F9R | Smartphone Xiaomi Mi8 |
| GPS solutions | 426 (88.6%) | 285 (59.3%) | 279 (58.0%) | 326 (67.8%) |
| Fixed ambiguities | 257 (60.3%) | 0 (0%) | 0 (0%) | 0 (0%) |
| < 1 m | 424 (88.2%) | 278 (57.8%) | 265 (55.1%) | 157 (32.6%) |
| < 30 cm | 389 (80.9%) | 118 (24.5%) | 184 (38.3%) | 43 (8.9%) |
| < 10 cm | 251 (52.2%) | 47 (9.8%) | 65 (13.5%) | 2 (0.4%) |
| < 1 m | 392 (81.5%) | 265 (55.1%) | 149 (31.0%) | 38 (7.9%) |
| < 30 cm | 389 (80.9%) | 118 (24.5%) | 84 (17.5%) | 37 (7.9%) |
| < 10 cm | 251 (52.2%) | 47 (9.8%) | 65 (13.5%) | 2 (0.4%) |
| Type of GNSS Device | ||||
|---|---|---|---|---|
| Parameters | Septentrio AsteRx-U | u-blox ZED-F9P | u-blox ZED-F9R | Smartphone Xiaomi Mi8 |
| GNSS solutions | 481 (100%) | 405 (84.2%) | 384 (79.8%) | 469 (97.5%) |
| Fixed ambiguities | 146 (30.3%) | 30 (7.4%) | 48 (12.5%) | 5 (1.1%) |
| < 1 m | 481 (100%) | 404 (84.0%) | 380 (79.0%) | 353 (73.4%) |
| < 30 cm | 385 (80.0%) | 145 (30.2%) | 222 (46.2%) | 121 (25.2%) |
| < 10 cm | 134 (37.9%) | 81 (16.8%) | 76 (15.8%) | 27 (5.6%) |
| < 1 m | 481 (100%) | 400 (83.2%) | 210 (43.7%) | 199 (41.4%) |
| < 30 cm | 385 (80.0%) | 145 (30.2%) | 199 (41.6%) | 120 (25.2%) |
| < 10 cm | 134 (37.9%) | 80 (16.8%) | 76 (15.8%) | 27 (5.6%) |
| Type of GNSS Device | ||||
|---|---|---|---|---|
| Parameters | Septentrio AsteRx-U | u-blox ZED-F9P | u-blox ZED-F9R | Smartphone Xiaomi Mi8 |
| GPS solutions | 963 (95.3%) | 875 (86.5%) | 860 (85.0%) | 914 (90.4%) |
| Fixed ambiguities | 669 (69.5%) | 46 (5.3%) | 261 (30.4%) | 1 (0.1%) |
| < 1 m | 943 (94.3%) | 871 (87.1%) | 849 (84.9%) | 786 (78.6%) |
| < 30 cm | 911 (91.1%) | 167 (16.7%) | 358 (35.8%) | 176 (17.6%) |
| < 10 cm | 793 (79.3%) | 40 (4.0%) | 141 (14.1%) | 11 (1.1%) |
| < 1 m | 895 (89.5%) | 783 (78.3%) | 788 (78.8%) | 492 (49.2%) |
| < 30 cm | 895 (89.5%) | 167 (16.7%) | 358 (35.8%) | 176 (17.6%) |
| < 10 cm | 793 (79.3%) | 40 (4.0%) | 141 (14.1%) | 11 (1.1%) |
| Type of GNSS Device | ||||
|---|---|---|---|---|
| Parameters | Septentrio AsteRx-U | u-blox ZED-F9P | u-blox ZED-F9R | Smartphone Xiaomi Mi8 |
| GNSS solutions | 990 (98.0%) | 971 (96.1%) | 946 (93.6%) | 989 (97.9%) |
| Fixed ambiguities | 711 (71.8%) | 648 (66.7%) | 750 (79.3%) | 8 (0.8%) |
| < 1 m | 972 (97.2%) | 970 (97.0%) | 945 (94.5%) | 644 (64.4%) |
| < 30 cm | 967 (96.7%) | 288 (28.8%) | 348 (34.8%) | 141 (14.1%) |
| < 10 cm | 919 (91.9%) | 45 (4.5%) | 115 (11.5%) | 11 (1.1%) |
| < 1 m | 972 (97.2%) | 951 (95.1%) | 945 (94.5%) | 577 (57.7%) |
| < 30 cm | 967 (96.7%) | 288 (28.8%) | 348 (34.8%) | 141 (14.1%) |
| < 10 cm | 919 (91.9%) | 45 (4.5%) | 115 (11.5%) | 11 (1.1%) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Viler, F.; Cefalo, R.; Sluga, T.; Snider, P.; Pavlovčič-Prešeren, P. The Efficiency of Geodetic and Low-Cost GNSS Devices in Urban Kinematic Terrestrial Positioning in Terms of the Trajectory Generated by MMS. Remote Sens. 2023, 15, 957. https://doi.org/10.3390/rs15040957
Viler F, Cefalo R, Sluga T, Snider P, Pavlovčič-Prešeren P. The Efficiency of Geodetic and Low-Cost GNSS Devices in Urban Kinematic Terrestrial Positioning in Terms of the Trajectory Generated by MMS. Remote Sensing. 2023; 15(4):957. https://doi.org/10.3390/rs15040957
Chicago/Turabian StyleViler, Filip, Raffaela Cefalo, Tatiana Sluga, Paolo Snider, and Polona Pavlovčič-Prešeren. 2023. "The Efficiency of Geodetic and Low-Cost GNSS Devices in Urban Kinematic Terrestrial Positioning in Terms of the Trajectory Generated by MMS" Remote Sensing 15, no. 4: 957. https://doi.org/10.3390/rs15040957
APA StyleViler, F., Cefalo, R., Sluga, T., Snider, P., & Pavlovčič-Prešeren, P. (2023). The Efficiency of Geodetic and Low-Cost GNSS Devices in Urban Kinematic Terrestrial Positioning in Terms of the Trajectory Generated by MMS. Remote Sensing, 15(4), 957. https://doi.org/10.3390/rs15040957