


Gaussian Process and Deep Learning Atmospheric Correction

Abstract
:1. Introduction
1.1. Background
1.2. Significance
1.3. Related Works
1.4. Issues
- Q1
- Assuming that the atmospheric correction is linear, comprised of an offset (upward diffuse) and gain (transmittance per band).
- Q2
- Assuming the minimum radiance value observed in each band is the upward diffuse.
- Q3
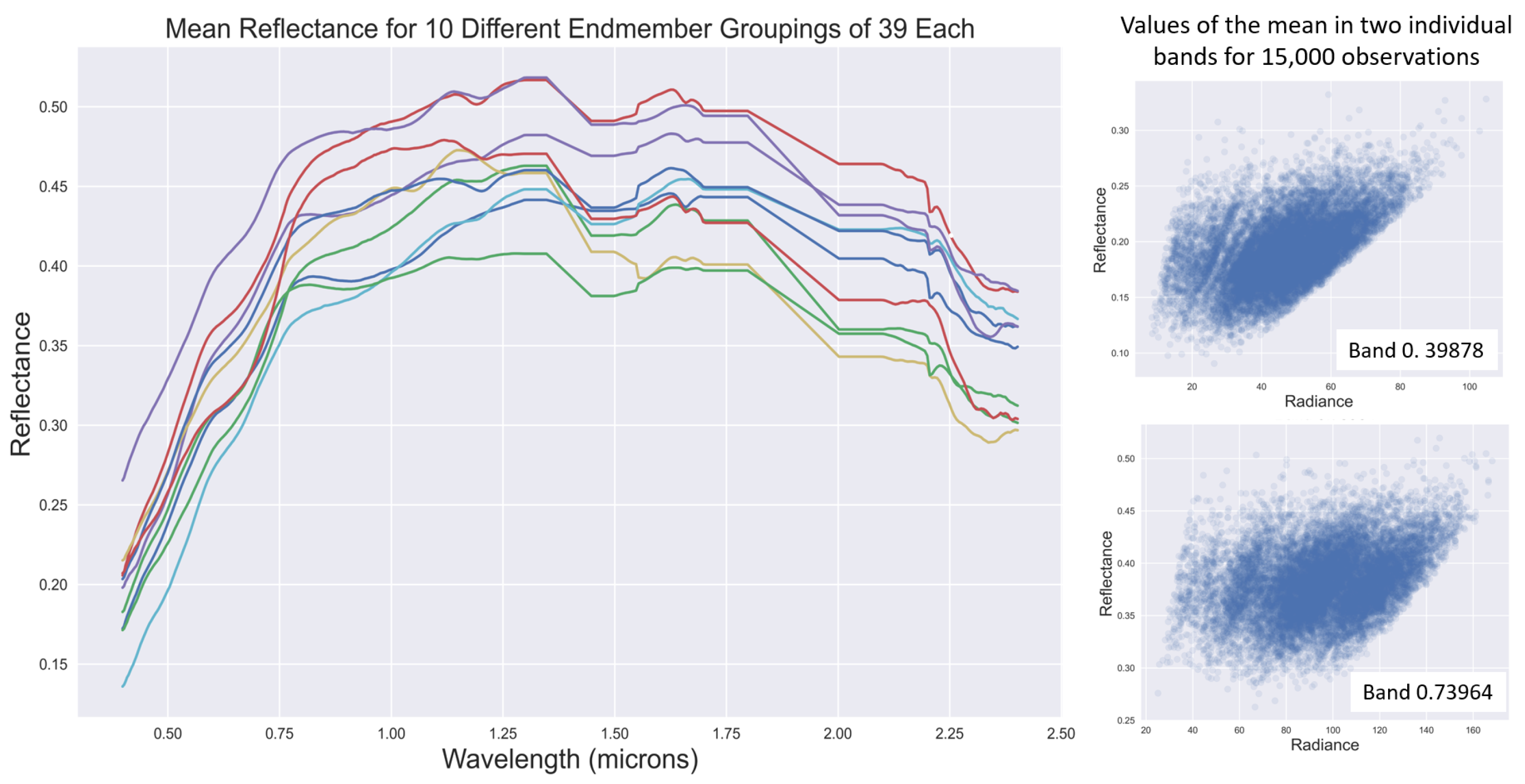
- Assuming that the mean reflectance of a collection of spectral diverse spectra is always the universal mean
1.5. Our Approach
2. Materials and Methods
2.1. Data
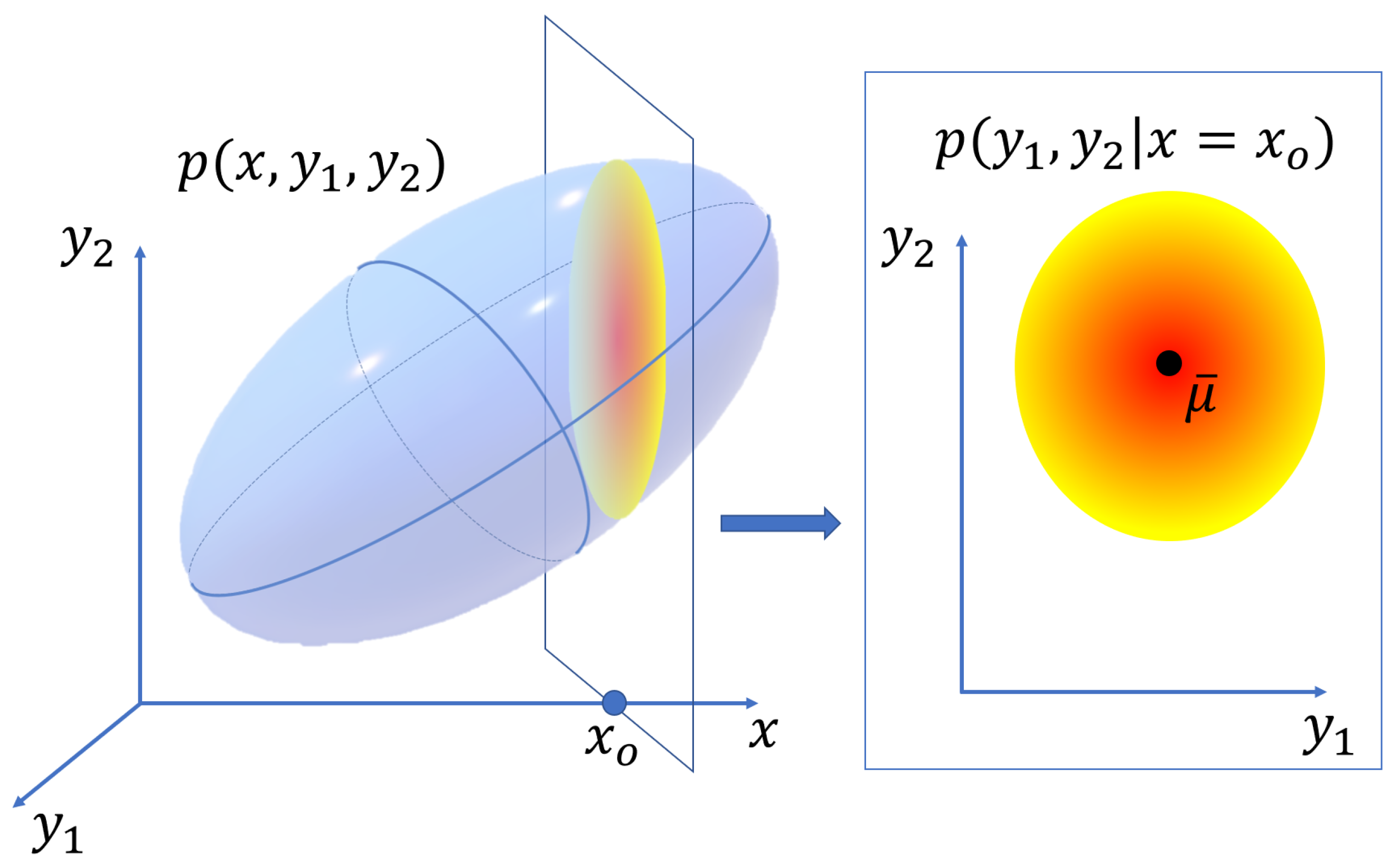
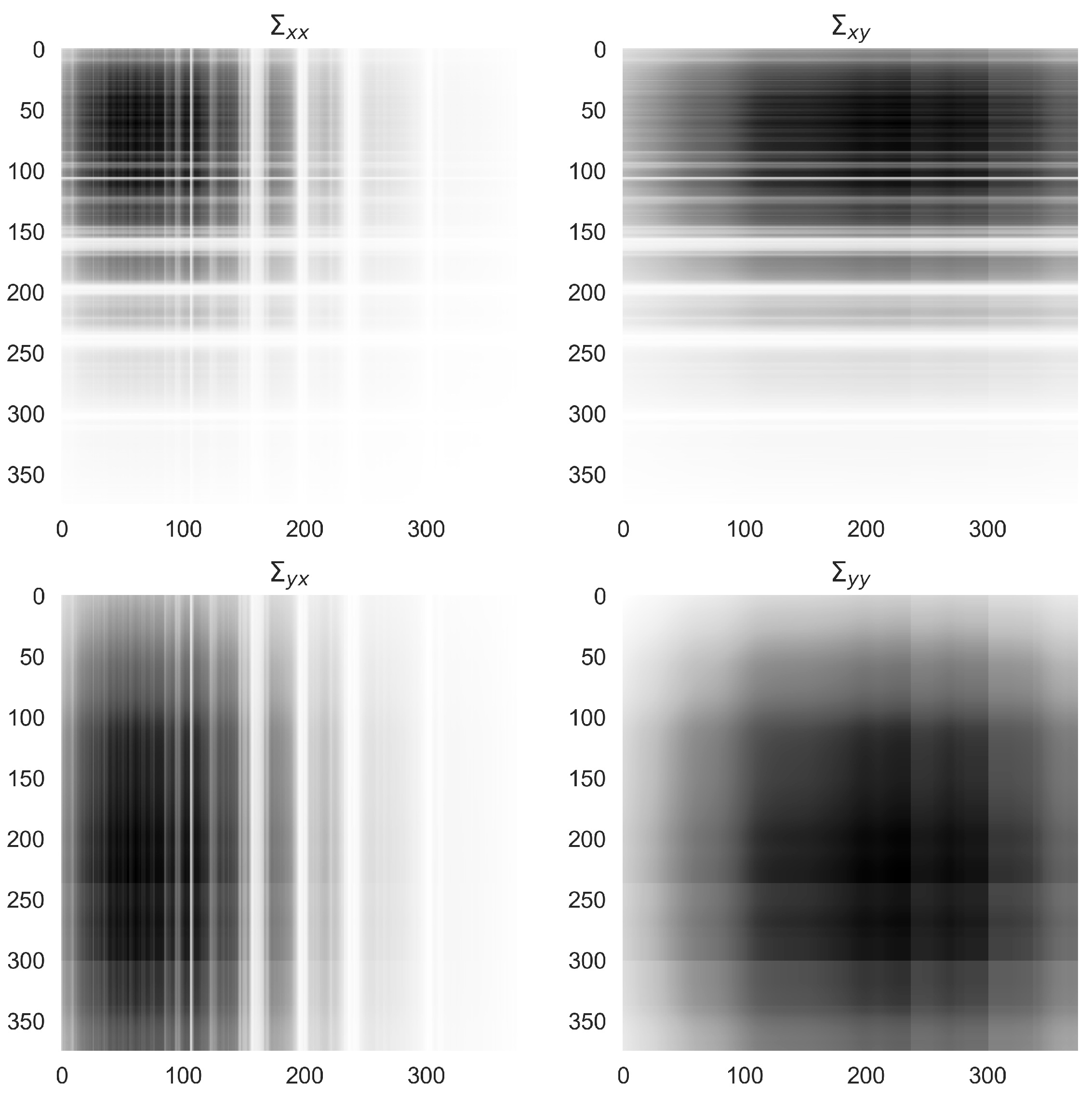
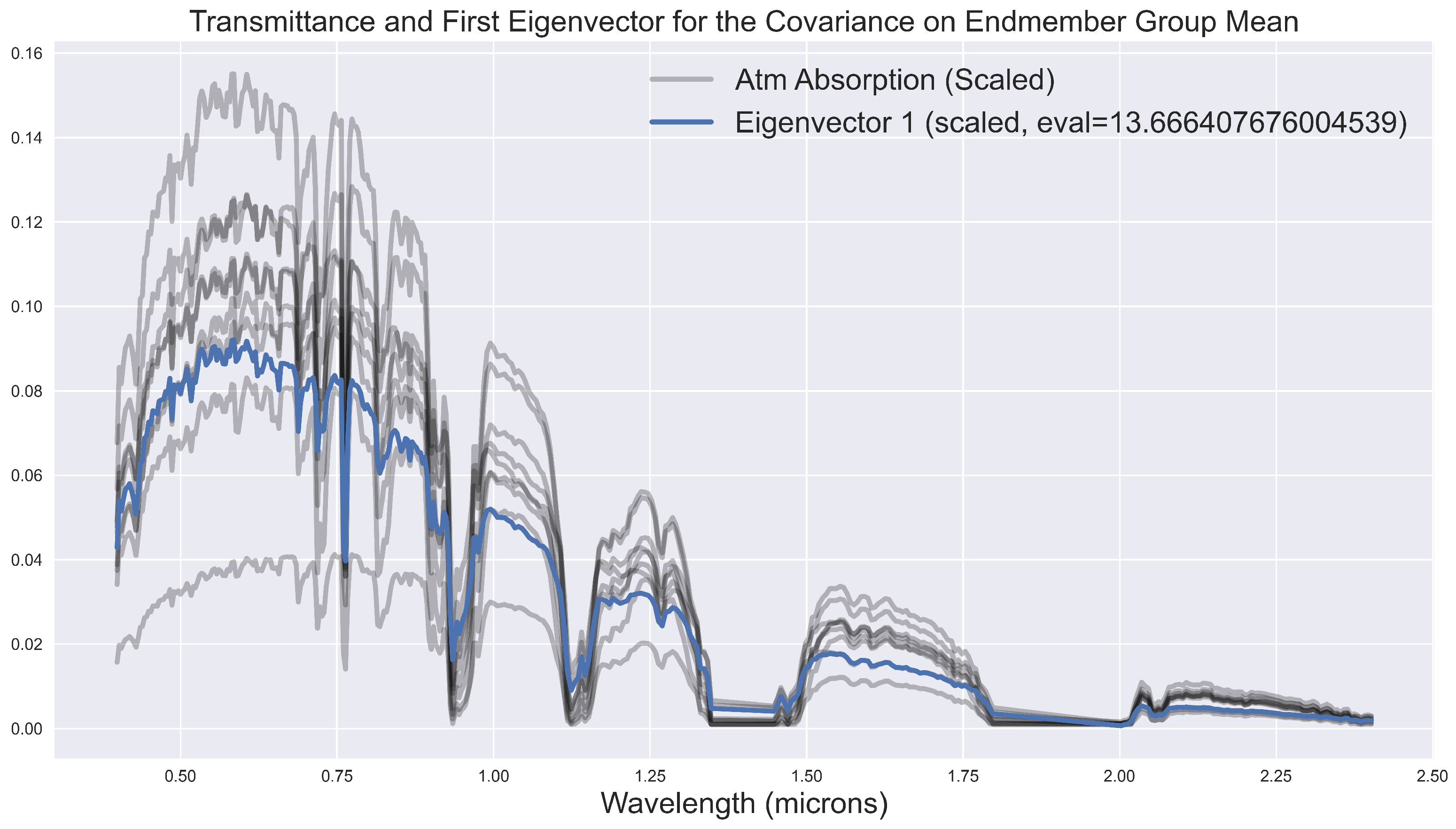
2.2. Gaussian Process Atmospheric Compensation
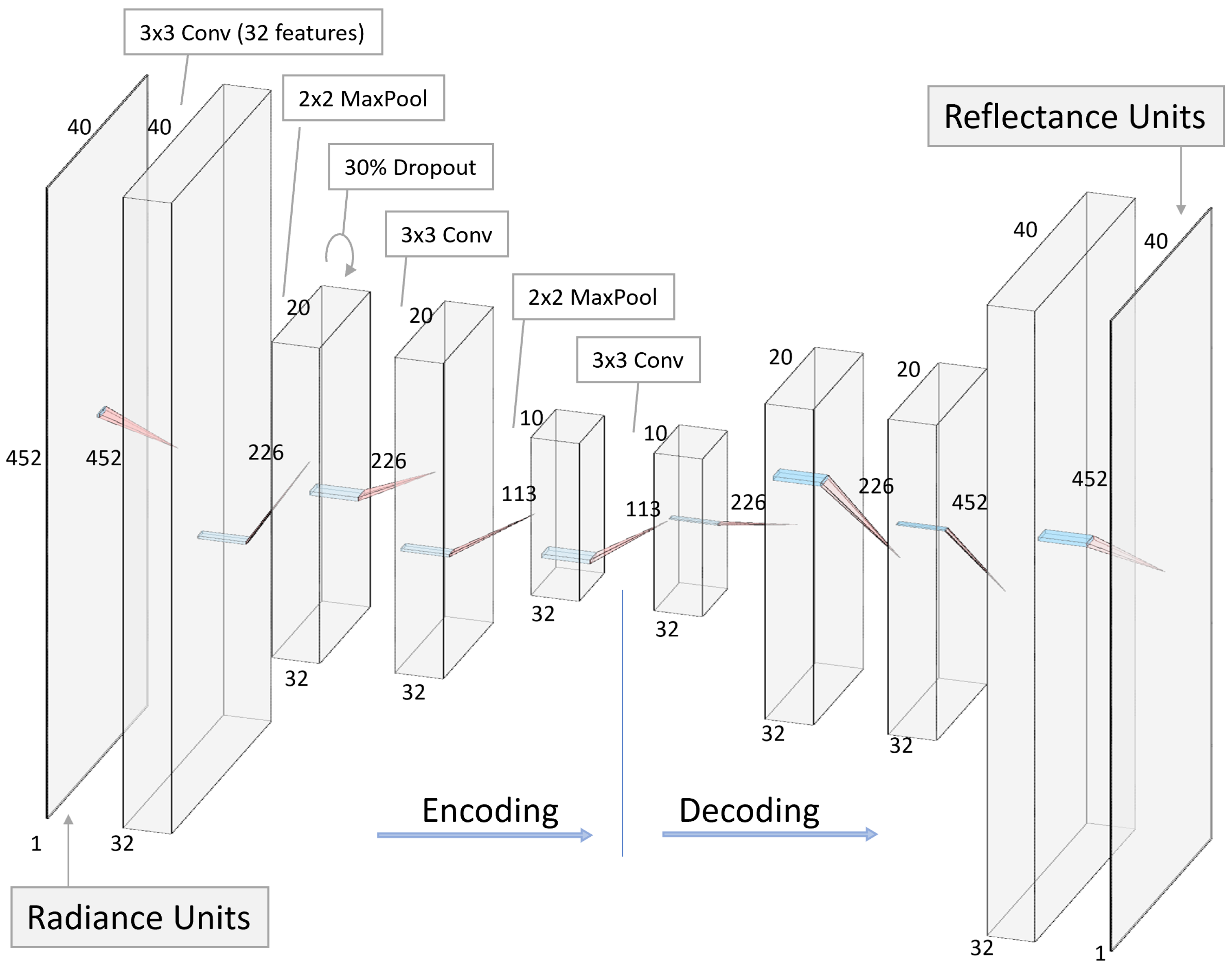
2.3. Denoising Autoencoder Atmospheric Compensation
3. Results
Evaluation Metrics
- 1.
- Mean Correlation: The mean of the correlations between each predicted reflectance spectrum with the corresponding true reflectance.
- 2.
- Standard Deviation in Correlation: The standard deviation of the correlations between each predicted reflectance spectrum with the corresponding true reflectance.
- 3.
- Percent with all bands in of True: The percent of spectra (out of the 1,299,987) for which the predicted reflectance is within of the true reflectance for all bands.
- 4.
- Percent with of bands in of True: The percent of spectra (out of the 1,299,987) for which the predicted reflectance is within of the true reflectance for at least of the bands.
4. Conclusions
4.1. Gaussian Process Atmospheric Compensation
4.2. Denoising Autoencoder Atmospheric Compensation
5. Patents
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| MDPI | Multidisciplinary Digital Publishing Institute |
| MODTRAN | MODerate resolution atmospheric TRANsmission |
| GPAC | Gaussian Process Atmospheric Correction |
| UMR | Universal Mean Regression |
| DA | Denoising Autoencoder |
References
- Berk, A.; Conforti, P.; Kennett, R.; Perkins, T.; Hawes, F.; van den Bosch, J. MODTRAN6: A major upgrade of the MODTRAN radiative transfer code. In Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XX; Velez-Reyes, M., Kruse, F.A., Eds.; International Society for Optics and Photonics (SPIE): Bellingham, DC, USA, 2014; Volume 9088, p. 90880H. [Google Scholar]
- Perkins, T.; Adler-Golden, S.M.; Matthew, M.W.; Berk, A.; Bernstein, L.S.; Lee, J.; Fox, M. Speed and accuracy improvements in FLAASH atmospheric correction of hyperspectral imagery. Opt. Eng. 2012, 51, 1–8. [Google Scholar] [CrossRef]
- Mamaghani, B.G.; Sasaki, G.V.; Connal, R.J.; Kha, K.; Knappen, J.S.; Hartzell, R.A.; Marcellus, E.D.; Bauch, T.D.; Raqueño, N.G.; Salvaggio, C. An initial exploration of vicarious and in-scene calibration techniques for small unmanned aircraft systems. In Autonomous Air and Ground Sensing Systems for Agricultural Optimization and Phenotyping III; International Society for Optics and Photonics: Bellingham, DC, USA, 2018; Volume 10664. [Google Scholar]
- Gao, B.; Montes, M.J.; Davis, C.O.; Goetz, A.F.H. Atmospheric correction algorithms for hyperspectral remote sensing data of land and ocean. Remote Sens. Environ. 2009, 113, S17–S24. [Google Scholar] [CrossRef]
- Bernstein, L.S.; Jin, X.; Gregor, B.; Adler-Golden, S.M. Quick atmospheric correction code: Algorithm description and recent upgrades. Opt. Eng. 2012, 51, 1–12. [Google Scholar] [CrossRef]
- Katkovsky, L.V.; Martenov, A.O.; Siliuk, V.A.; Ivanov, D.A. SHARC method for fast atmospheric correction of hyperspectral data. In Remote Sensing of Clouds and the Atmosphere XXIII; Comerón, A., Kassianov, E.I., Schäfer, K., Picard, R.H., Weber, K., Eds.; International Society for Optics and Photonics (SPIE): Bellingham, DC, USA, 2018; Volume 10786, pp. 53–65. [Google Scholar]
- Bernstein, L.S.; Adler-Golden, S.M.; Sundberg, R.L.; Levine, R.Y.; Perkins, T.C.; Berk, A.; Ratkowski, A.J.; Felde, G.; Hoke, M.L. Validation of the quick atmospheric correction (quac) algorithm for vnir-swir multi-and hyperspectral imagery. In Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XI; SPIE: Bellingham, DC, USA, 2005; Volume 5806, pp. 668–678. [Google Scholar]
- Eaton, M.L. Multivariate Statistics: A Vector Space Approach; John Wiley & Sons, Inc.: New York, NY, USA, 1983. [Google Scholar]
- Bank, D.; Koenigstein, N.; Giryes, R. Autoencoders. arXiv 2020, arXiv:2003.05991. [Google Scholar]
- Vincent, P.; Larochelle, H.; Bengio, Y.; Manzagol, P. Extracting and composing robust features with denoising autoencoders. In Proceedings of the 25th International Conference on Machine learning, Helsinki, Finland, 5–9 July 2008; pp. 1096–1103. [Google Scholar]
- Vincent, P.; Larochelle, H.; Lajoie, I.; Bengio, Y.; Manzagol, P.; Bottou, L. Stacked denoising autoencoders: Learning useful representations in a deep network with a local denoising criterion. J. Mach. Learn. Res. 2010, 11, 12. [Google Scholar]
- Ruikai, C. Research progress in image denoising algorithms based on deep learning. J. Phys. Conf. Ser. 2019, 1345, 042055. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Li, H.; Xu, Z.; Taylor, G.; Studer, C.; Goldstein, T. Visualizing the loss landscape of neural nets. Adv. Neural Inf. Process. Syst. 2018, 31, 3144. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metric | GPAC | UMR | DA |
|---|---|---|---|
| Mean Correlation | 0.96 | 0.94 | 0.86 |
| Std. Deviation in Correlation | 0.11 | 0.14 | 0.19 |
| percent with all bands | |||
| in of True | |||
| percent with of bands | |||
| in of True |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Basener, B.; Basener, A. Gaussian Process and Deep Learning Atmospheric Correction. Remote Sens. 2023, 15, 649. https://doi.org/10.3390/rs15030649
Basener B, Basener A. Gaussian Process and Deep Learning Atmospheric Correction. Remote Sensing. 2023; 15(3):649. https://doi.org/10.3390/rs15030649
Chicago/Turabian StyleBasener, Bill, and Abigail Basener. 2023. "Gaussian Process and Deep Learning Atmospheric Correction" Remote Sensing 15, no. 3: 649. https://doi.org/10.3390/rs15030649
APA StyleBasener, B., & Basener, A. (2023). Gaussian Process and Deep Learning Atmospheric Correction. Remote Sensing, 15(3), 649. https://doi.org/10.3390/rs15030649