
Analysis of Depths Derived by Airborne Lidar and Satellite Imaging to Support Bathymetric Mapping Efforts with Varying Environmental Conditions: Lower Laguna Madre, Gulf of Mexico


Abstract
:1. Introduction
- Can we measure the bottom of a shallow and hypersaline lagoon using an airborne lidar system? What were the possible operational bottlenecks, and what lessons did we learn?
- Can we confirm the accuracy of lidar bathymetry with sonar? How do they complement each other?
- How can we predict varying levels of turbidity based on satellite imaging? What were the potential benefits of conducting quantitative pixel reflectance analysis in bathymetric lidar mapping?
- Is SDB a feasible methodology to measure the depths of shallow, turbid, and hypersaline lagoons? Can we compare and quantify SDB to lidar bathymetry in these conditions?
2. Materials and Methods
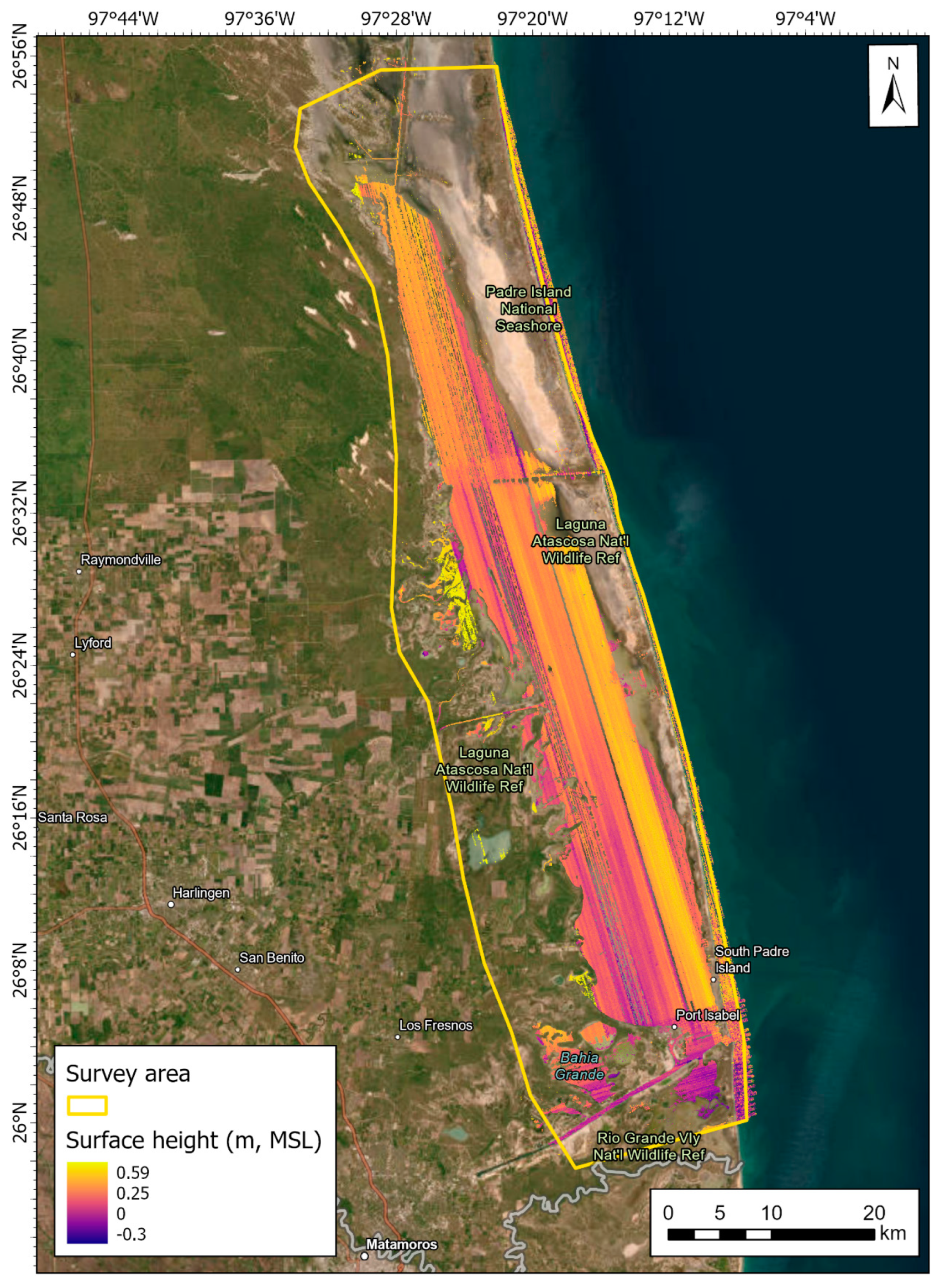
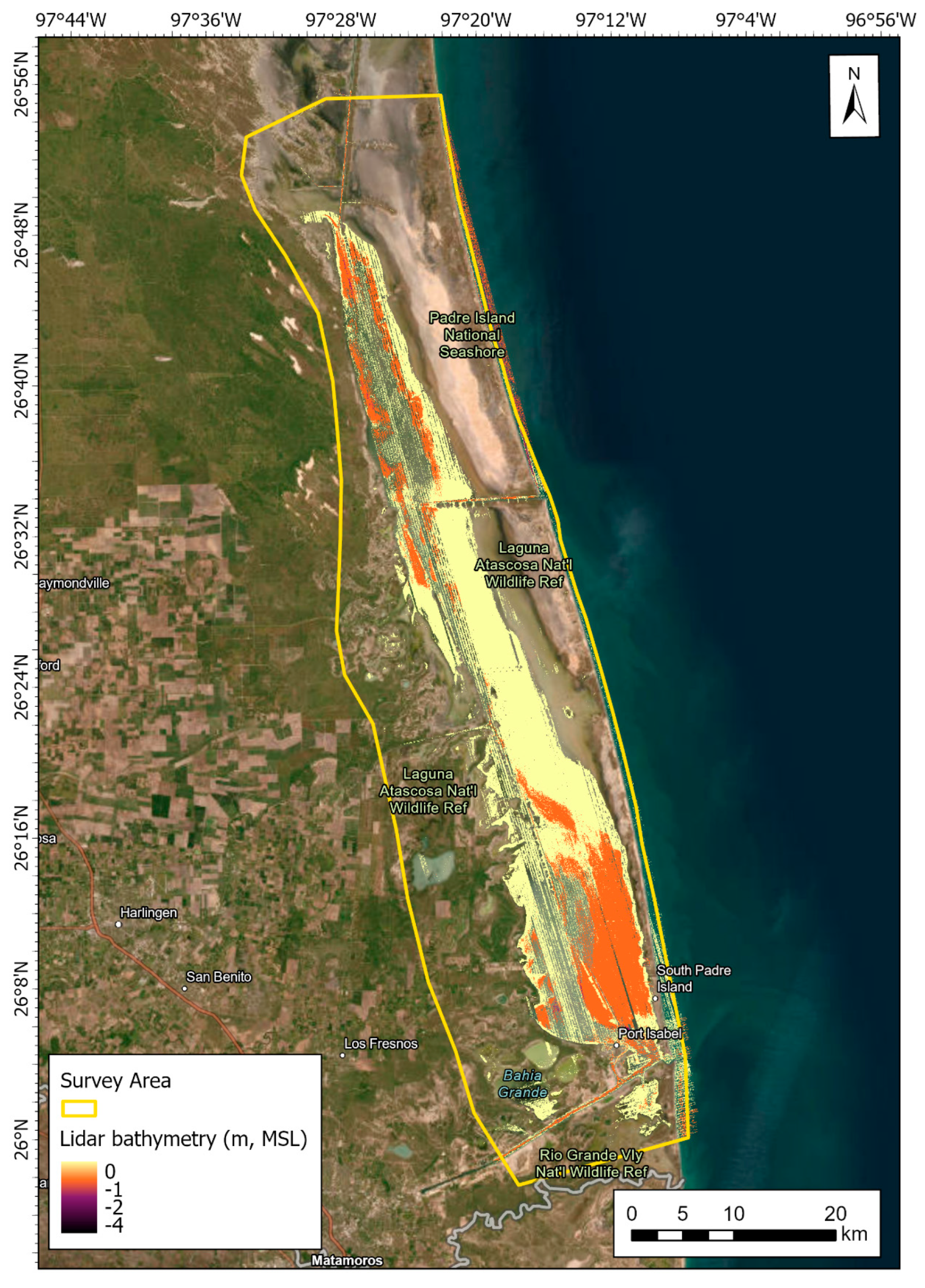
2.1. Project Location
2.2. In-Situ Campaign
2.3. Tide and Datum Adjustments for Bathymetry
2.4. Vector Data Analysis
2.5. Airborne Lidar Bathymetry and System Calibration
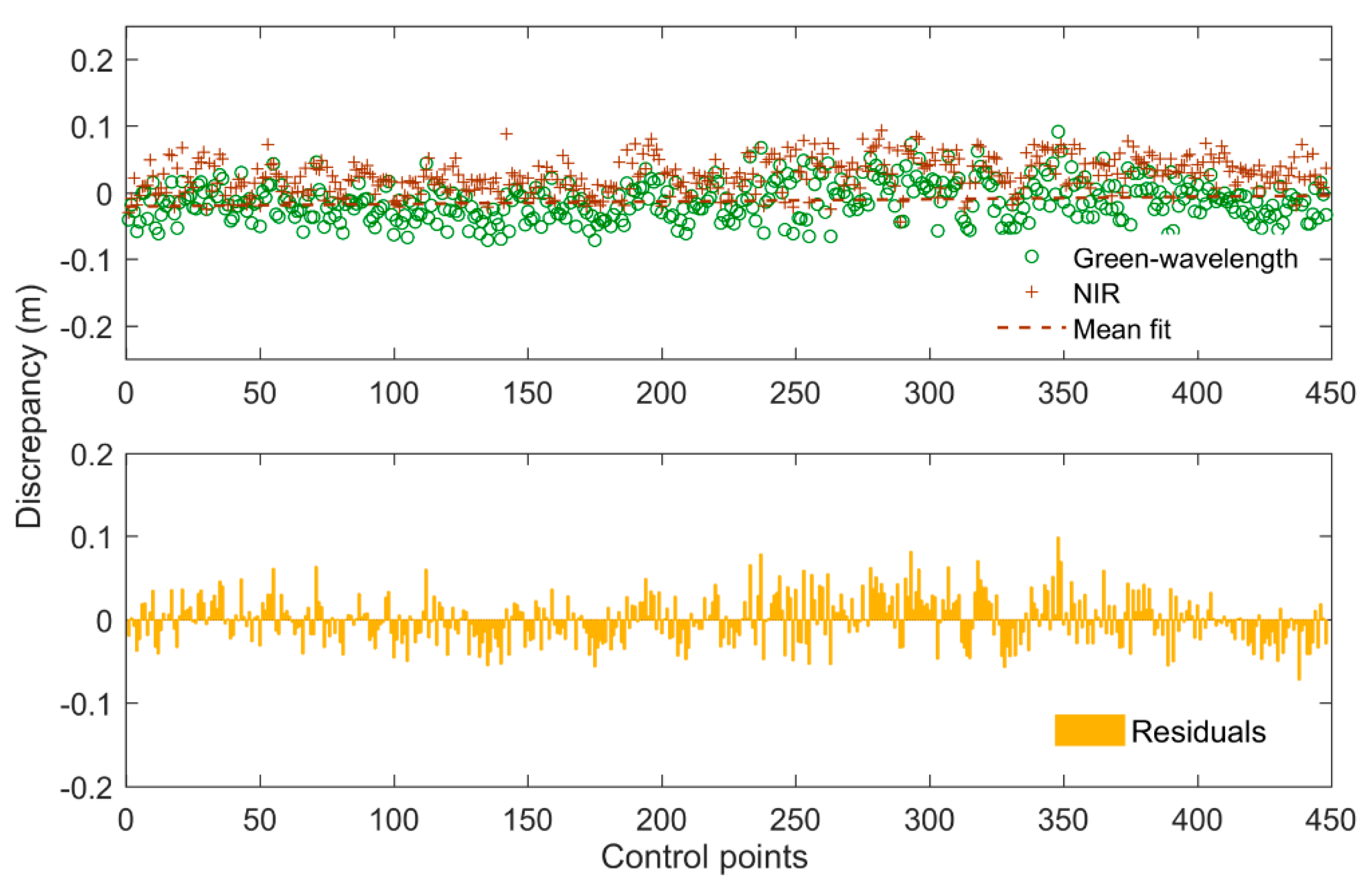
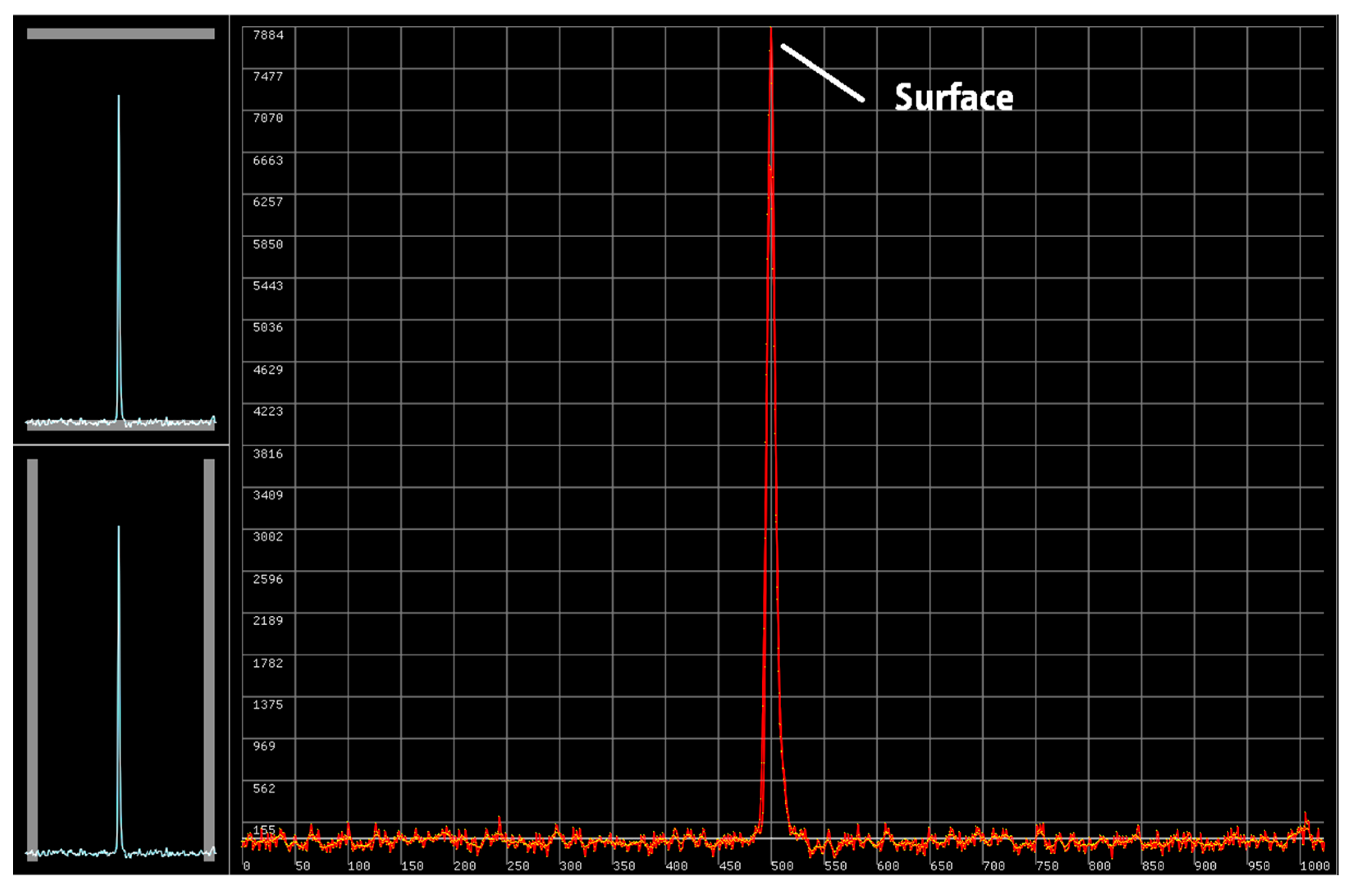
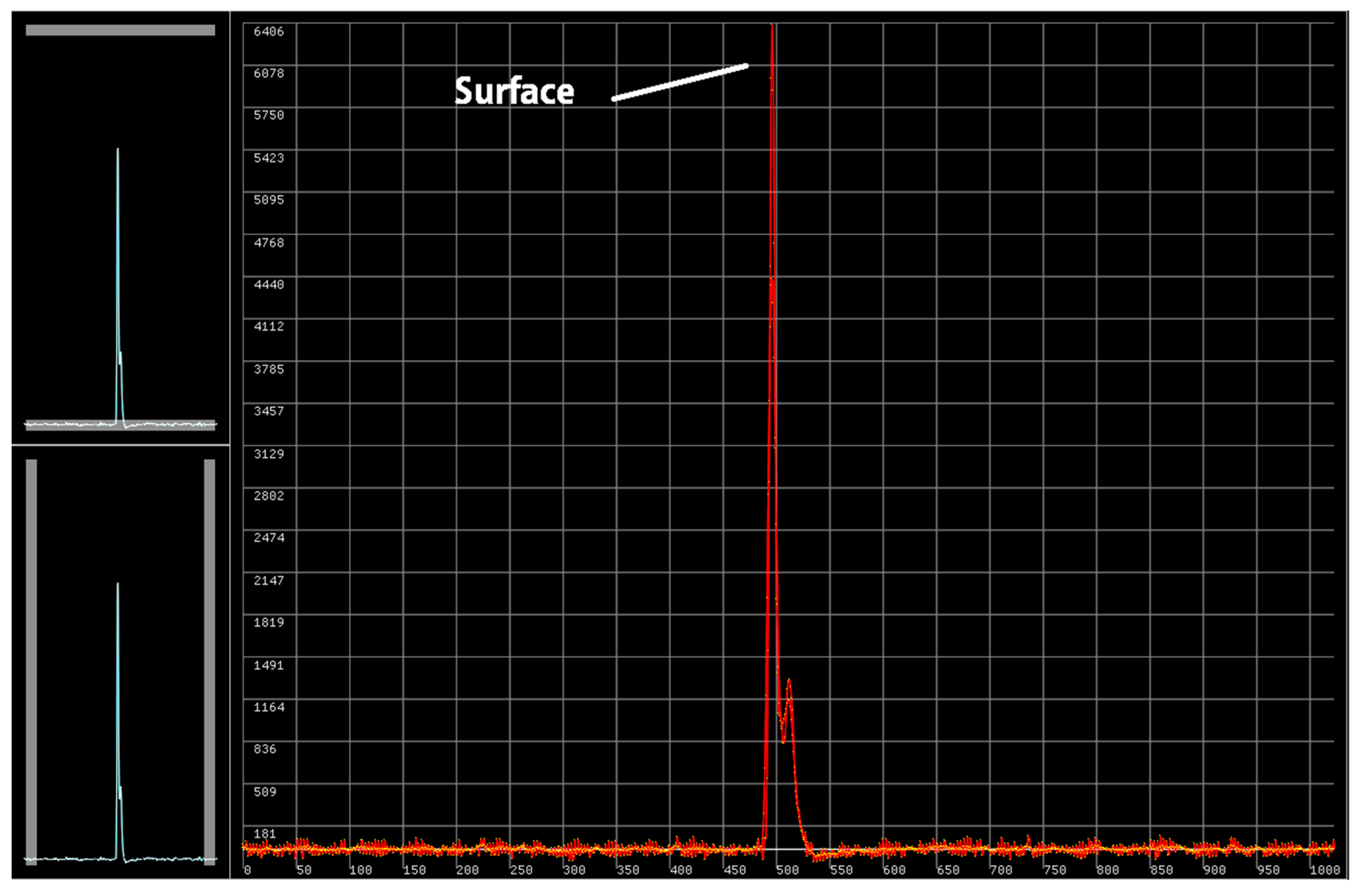
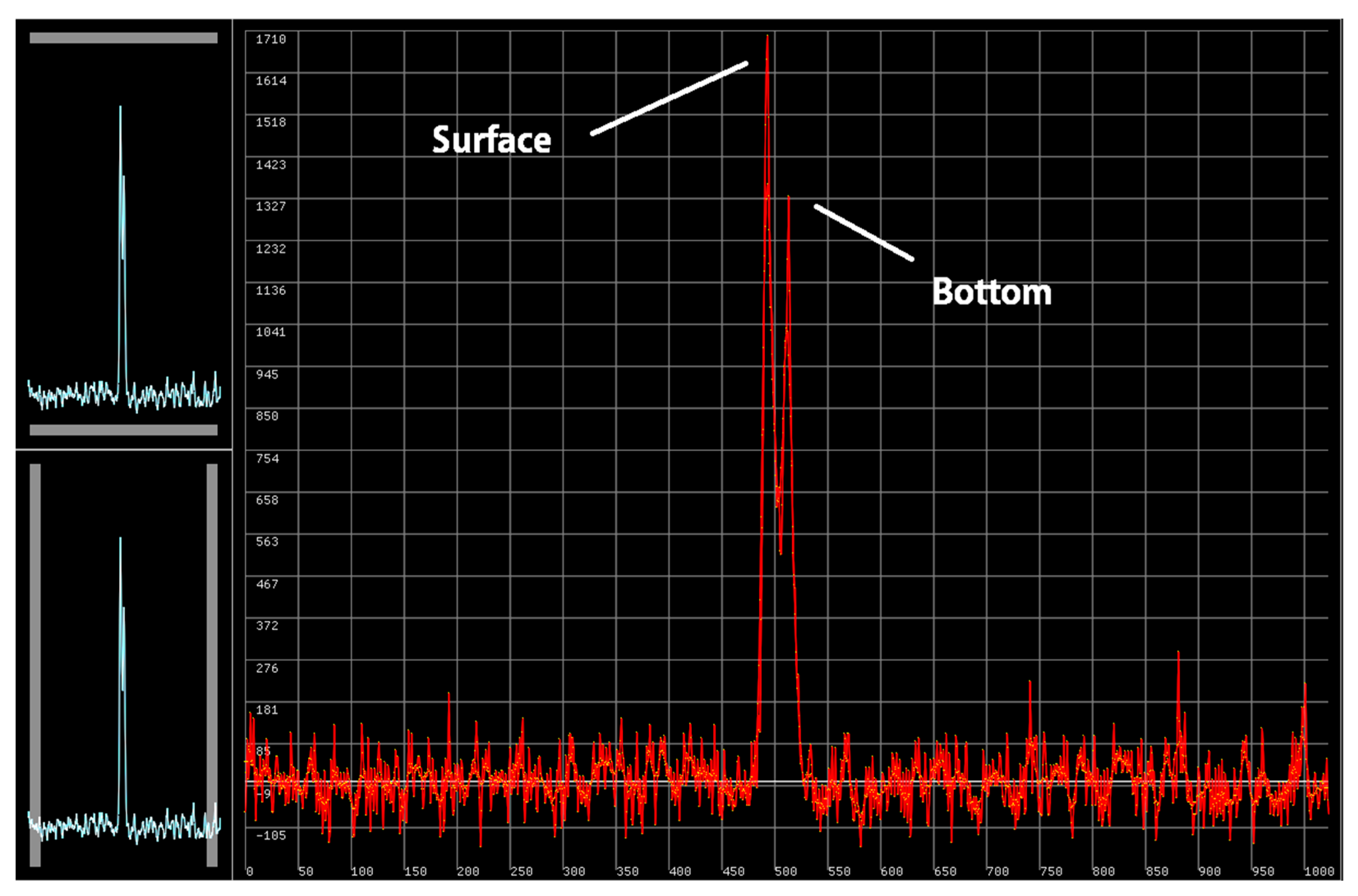
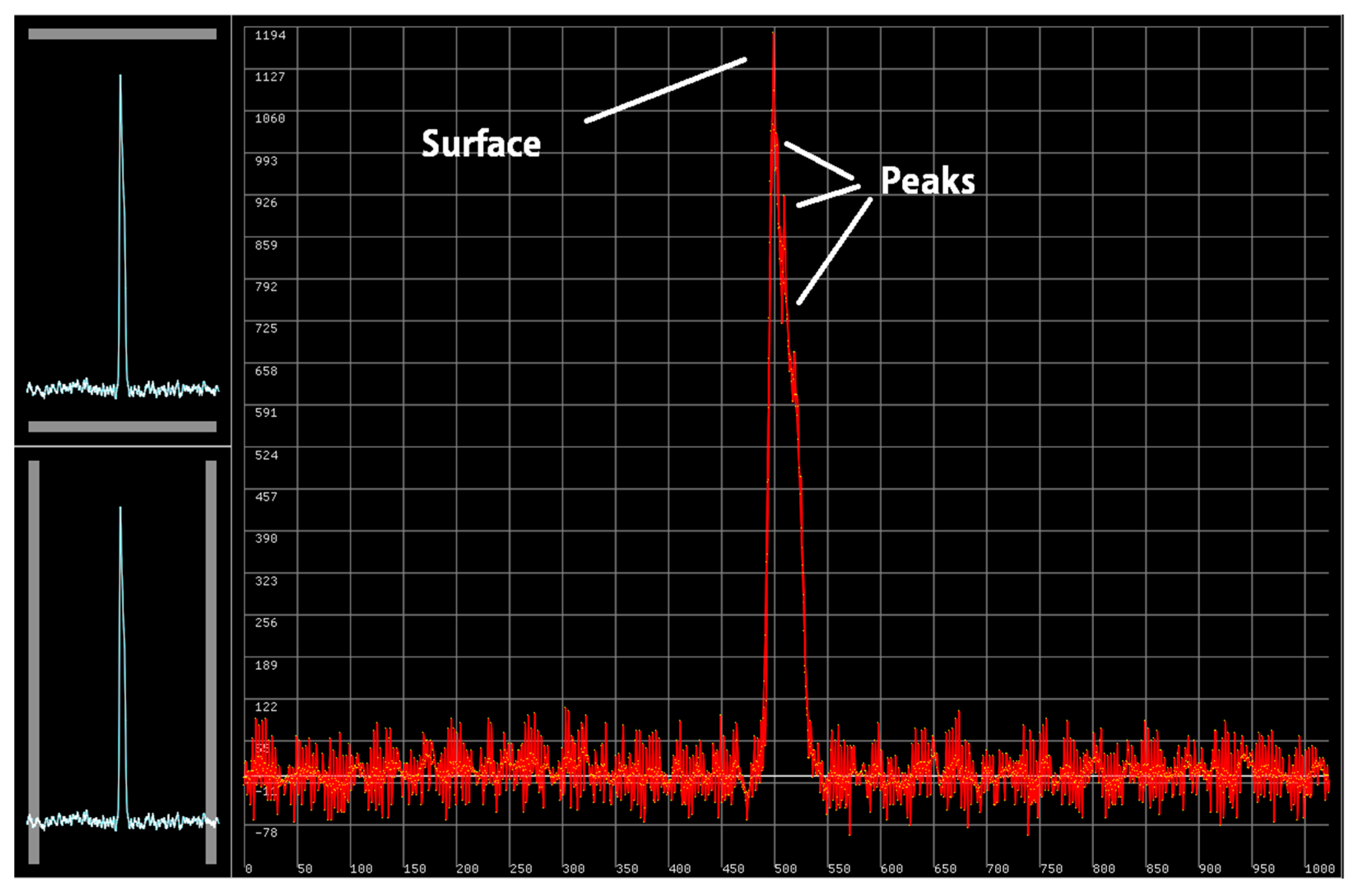
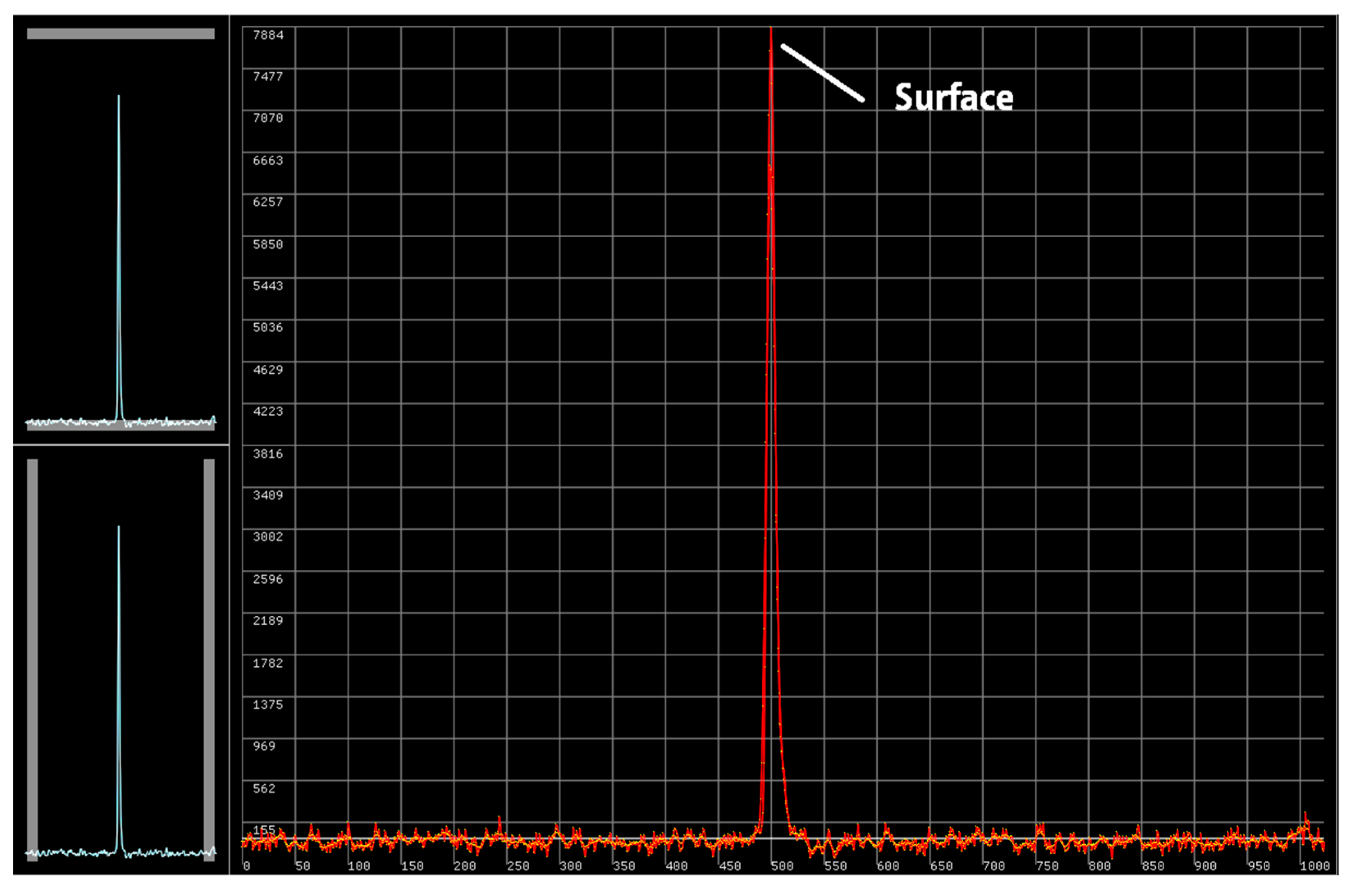
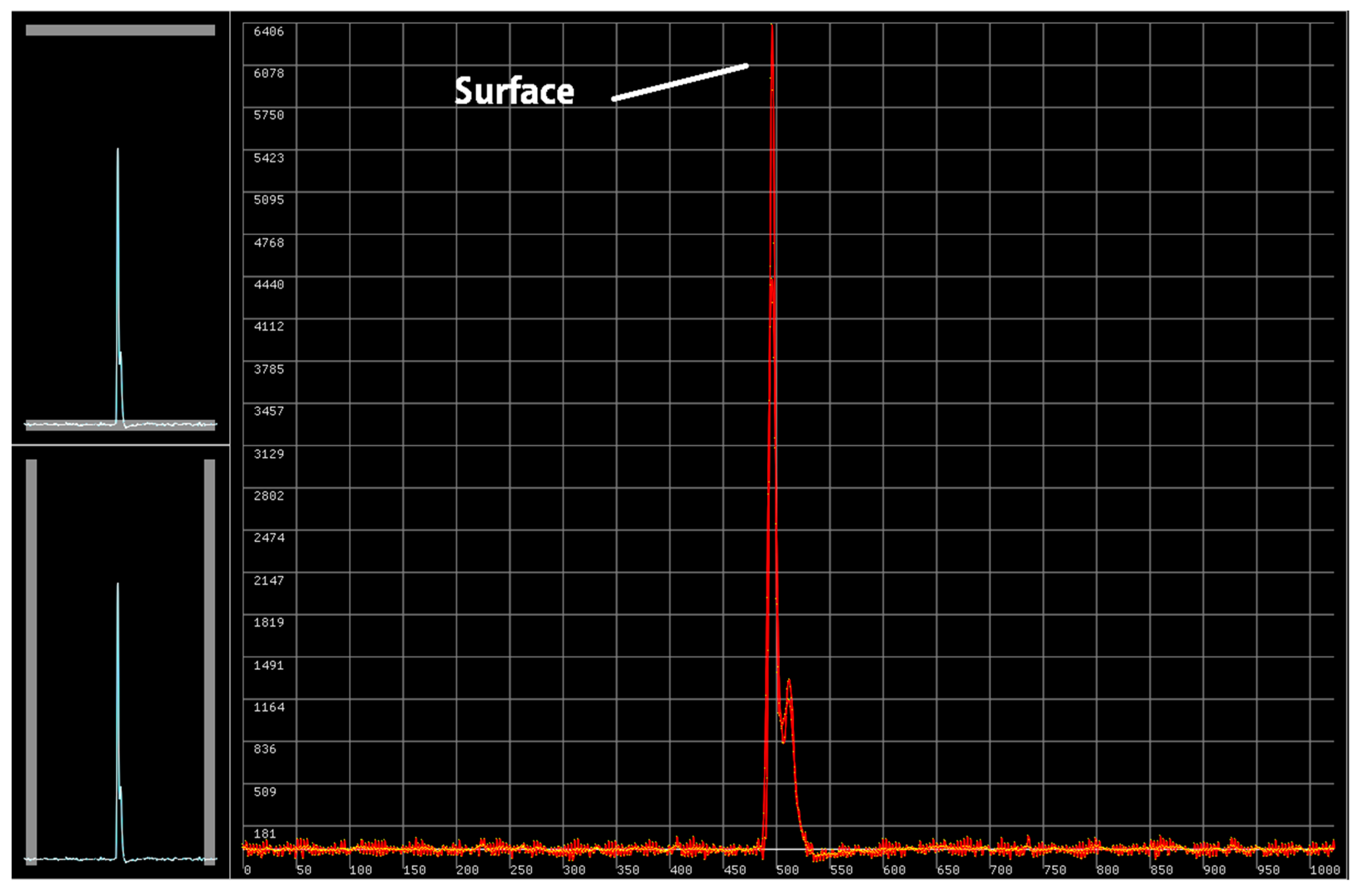
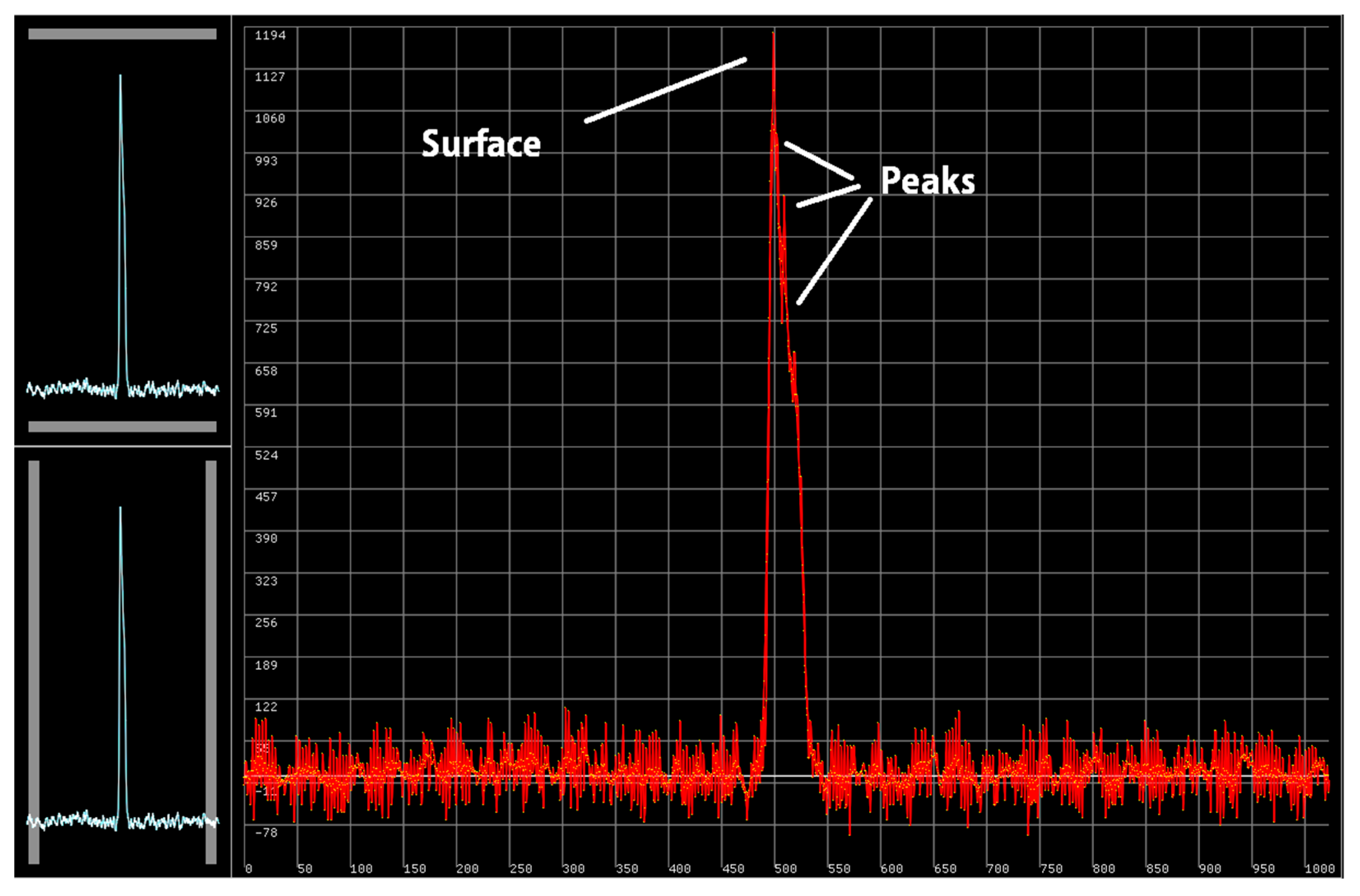
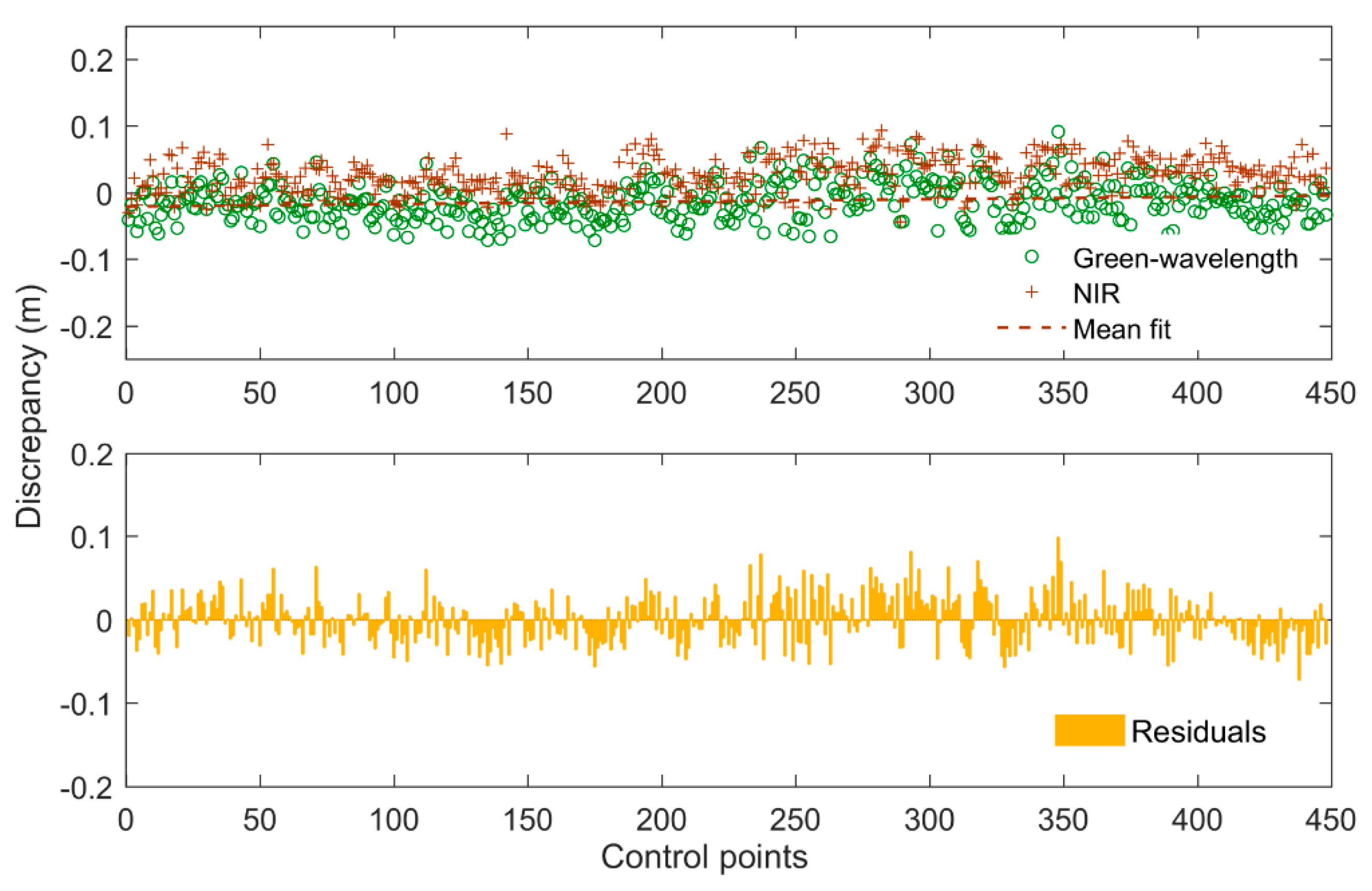
- Class 0 returns represent the water surface synthetically and they are interpolated using a proprietary AHAB algorithm. The NIR channel measurements estimate the water surface’s elevation, and the algorithm uses the synthetic surface to inform the selection of peaks in the green channel waveform.
- Class 5 returns represent the water surface and are calculated by picking out the first strong peak from the green channel waveform without using data from the NIR channel.
- Class 7 returns represent a reflective surface in the water column and are calculated by selecting a second strong peak from the waveform.
- Class 10 returns represent a reflective surface in the water column and are calculated using peaks of lower amplitude than those used in Class 7. The weaker peaks are selected using a proprietary algorithm to improve the lidar system’s depth-measuring capability by discarding peaks created by low or moderate turbidity levels.
2.6. Satellite Imagery and Pixel Reflectance Analysis
2.7. Satellite-Derived Bathymetry
3. On-Site Analysis
4. Results
4.1. ALB System Calibration
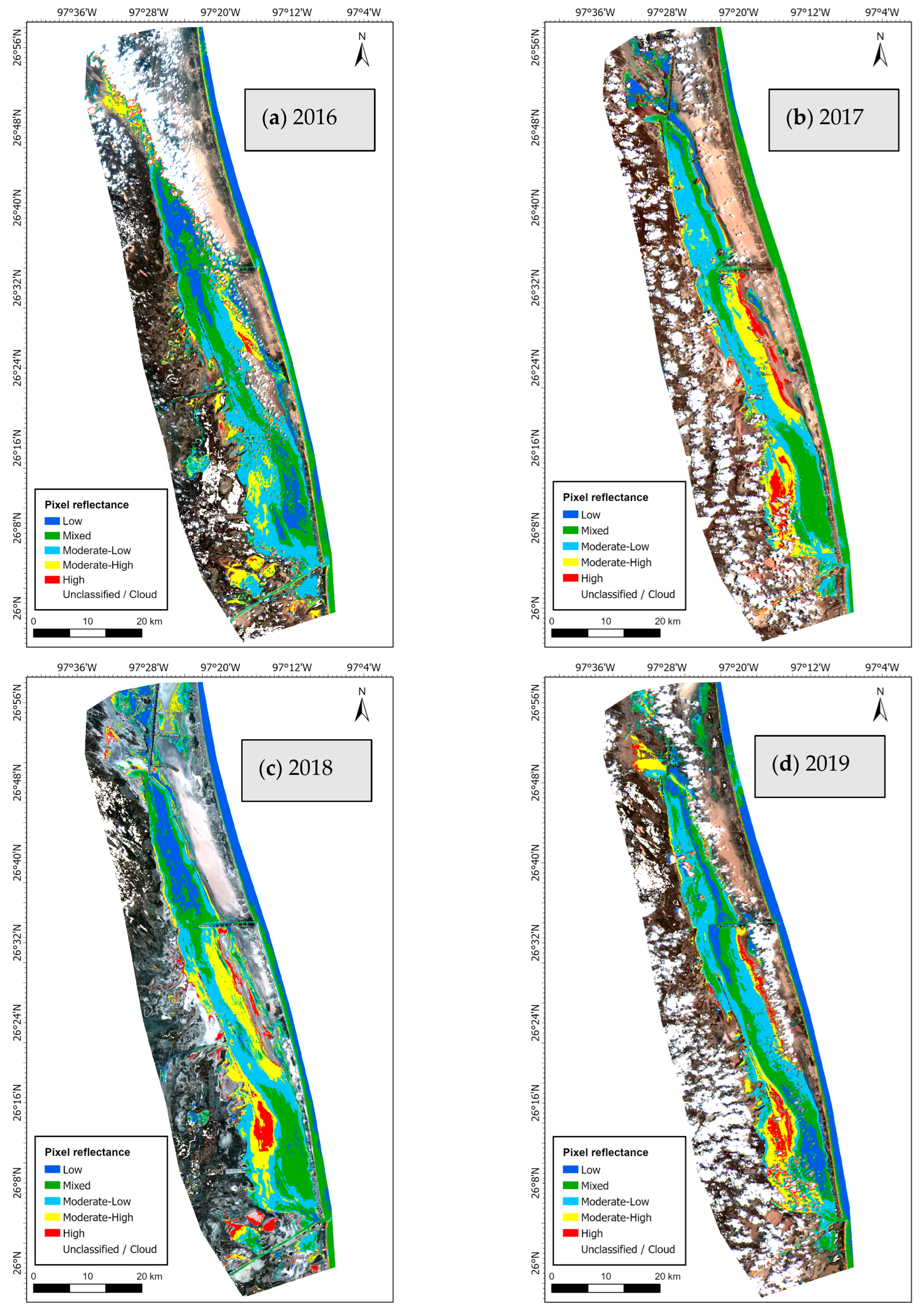
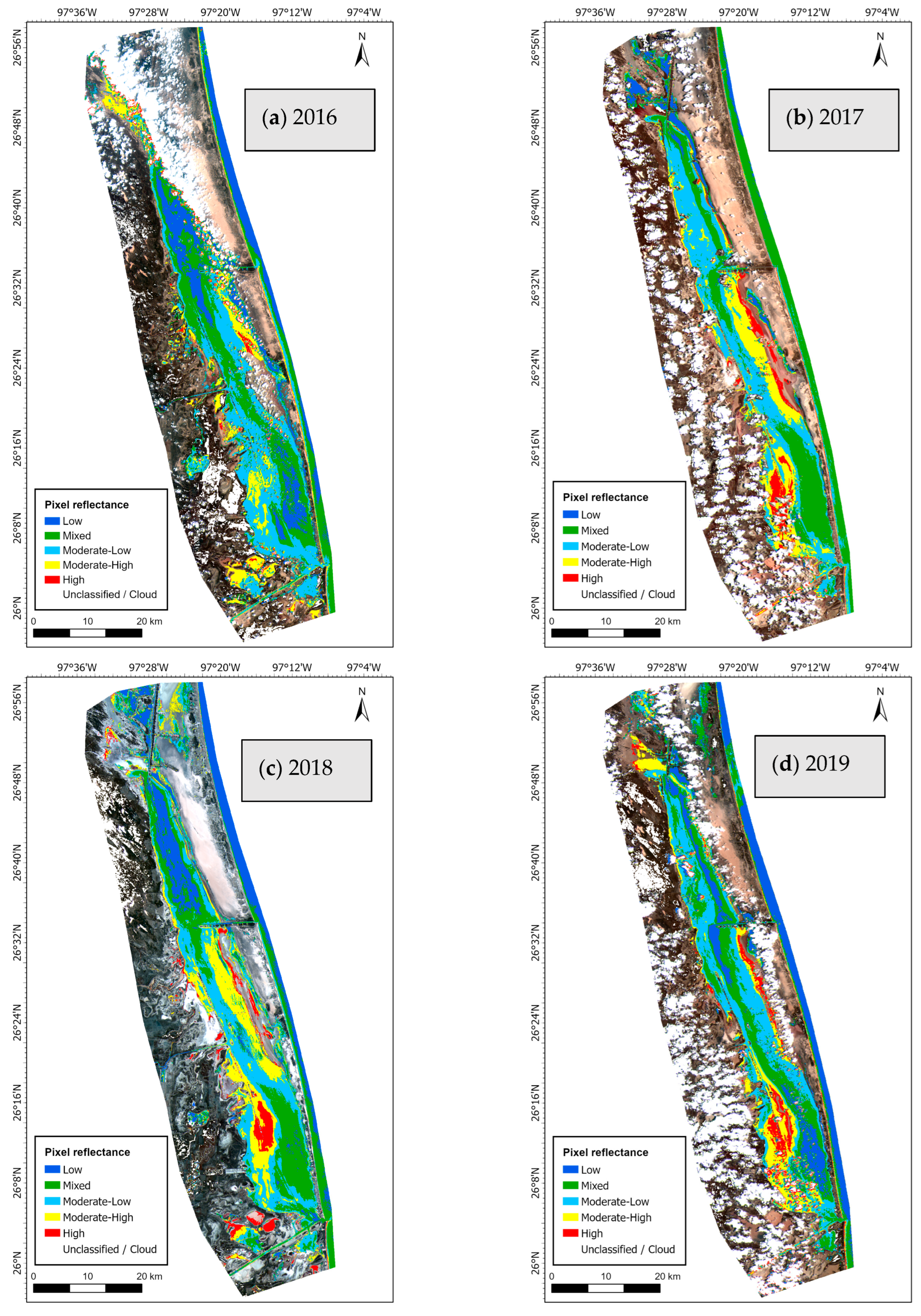
4.2. Pixel Reflectance
- In 2016, the average reflectance values were the lowest; therefore, the overall water quality was higher. Furthermore, the moderate-high and high reflectance classes indicated the lowest pixel counts (3.54%), confirming higher water quality, particularly in the southwestern parts of the lagoon (Figure 5a).
- In 2017, the low reflectance classes were least significant (1.05%), while the mixed reflectance class registered (6.02%) as the most substantial, translating to the lowest water quality of all years analyzed (Figure 5b).
- In 2018, pixel count was lower in moderate-high and high reflectance classes (5.22%), which translated to lower water quality. However, water quality has increased visibly in the northern parts of the lagoon (Figure 5c).
- In 2019, the low reflectance class registered the highest pixel count (4.33%), resulting in the most suitable conditions for SDB analysis (Figure 5d).
4.3. Lidar Bathymetry
4.4. Lidar Bathymetry versus Sonar
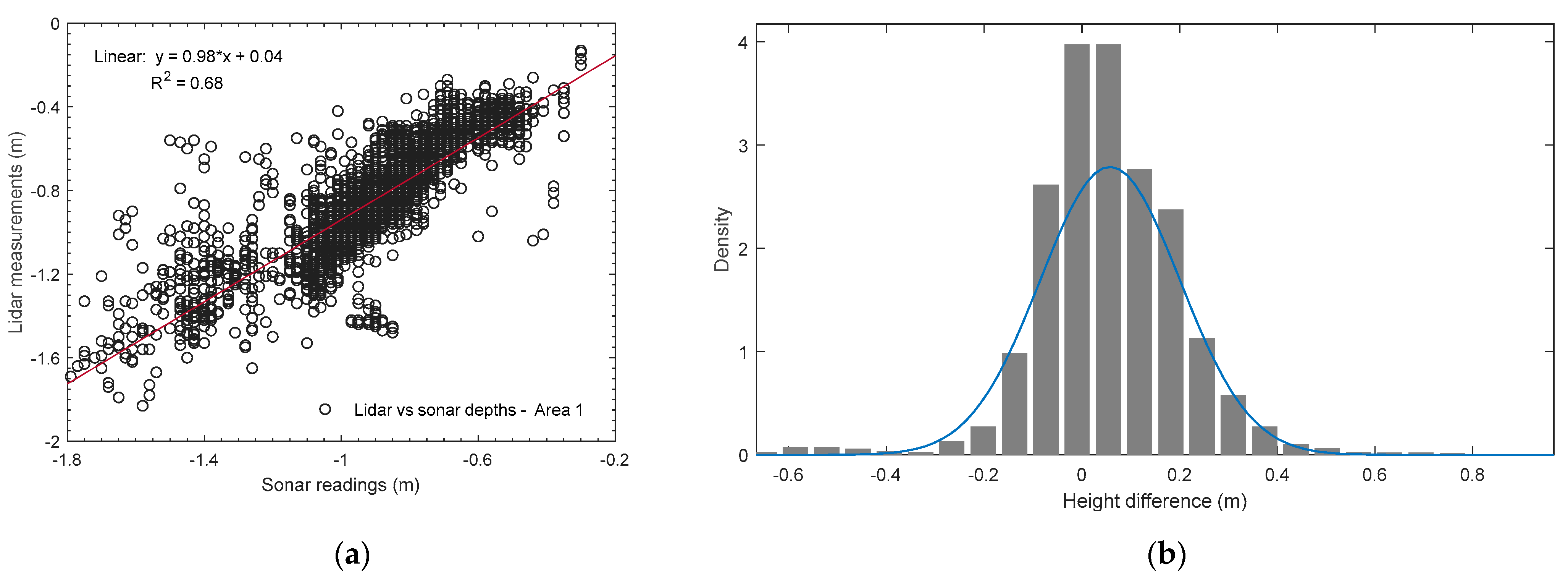
- In Area-1, the water was shallow, the bottom was visible to the observer, and we sampled the lowest turbidity (2.7 NTU). Initially, the comparison algorithm returned poor correspondence efficiency (5%) in matching sonar to lidar measurements because of the sparse nature of sonar recordings. Therefore, we increased the distance of circumcenter triangle coverage (default dS1i = 1 m) of lidar TIN patches to 5 m and the height (h) tolerance to 1 m (default = 0.5 m). We kept the slope angle at the default setting (45°). As a result, the algorithm efficiency increased, and the matching rate improved (55%). The correspondence produced a linear relationship, where returns deeper than 1 m were scattered (R2 = 0.68). In this location, the average height for lidar/sonar was −0.87/−0.92 m MSL and the deepest measurement was −1.83 m MSL (Figure 9a,b).
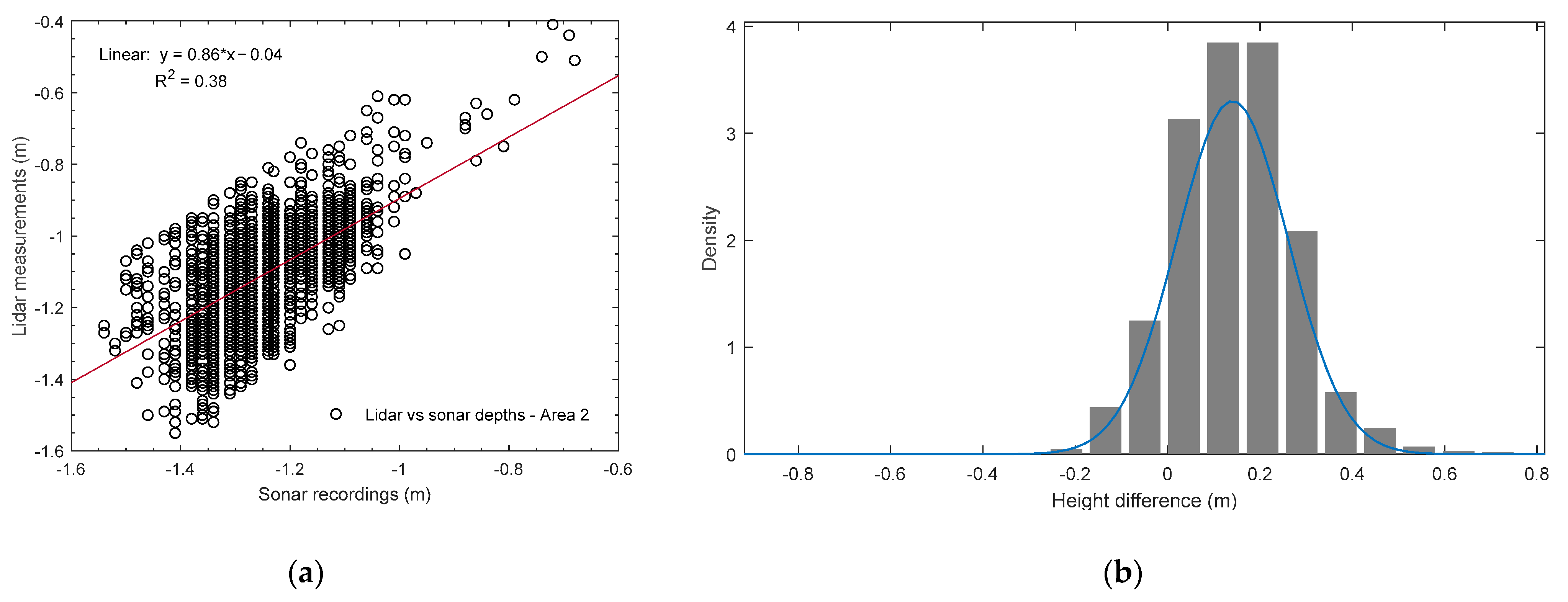
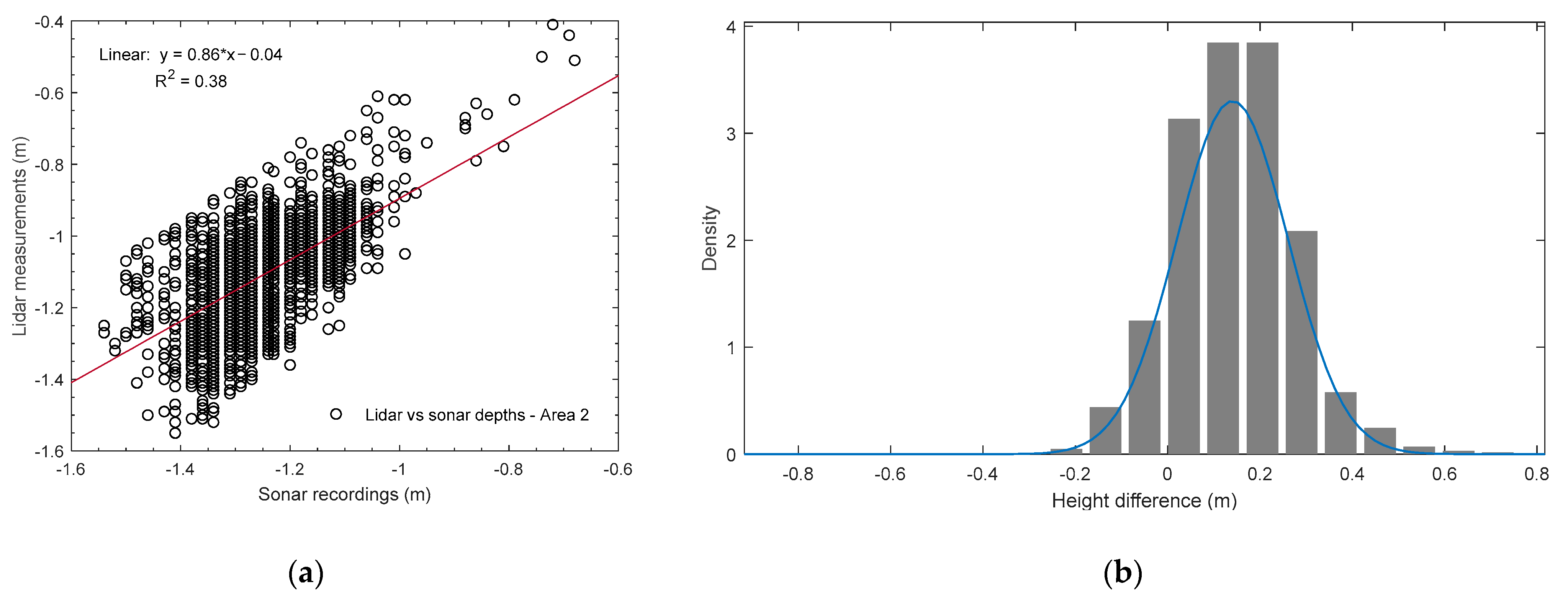
- In Area-2, the lagoon bottom was partially visible, and we observed varying Secchi disk depths (0.6–0.9 m). Overall, turbidity has increased (8.6 NTU), and the comparison algorithm matched fewer sonar to lidar measurements (40%), producing less dependable matches, particularly in depths shallower than 1 m, indicating the increased turbidity. The mean lidar depth was −1.09 m MSL, and the sonar measured 14 cm deeper (−1.23 m MSL). The correspondence between the measurements was linear but produced a less favorable agreement (R2 = 0.38, Figure 10a,b).
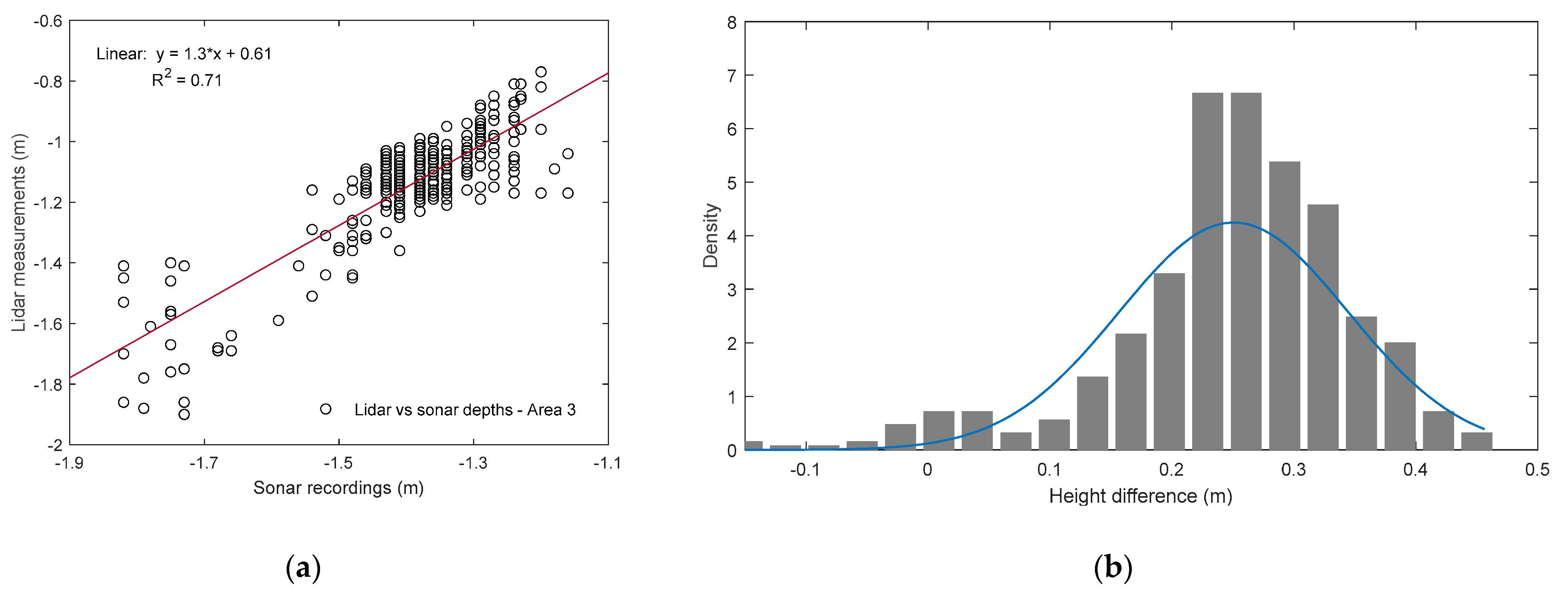
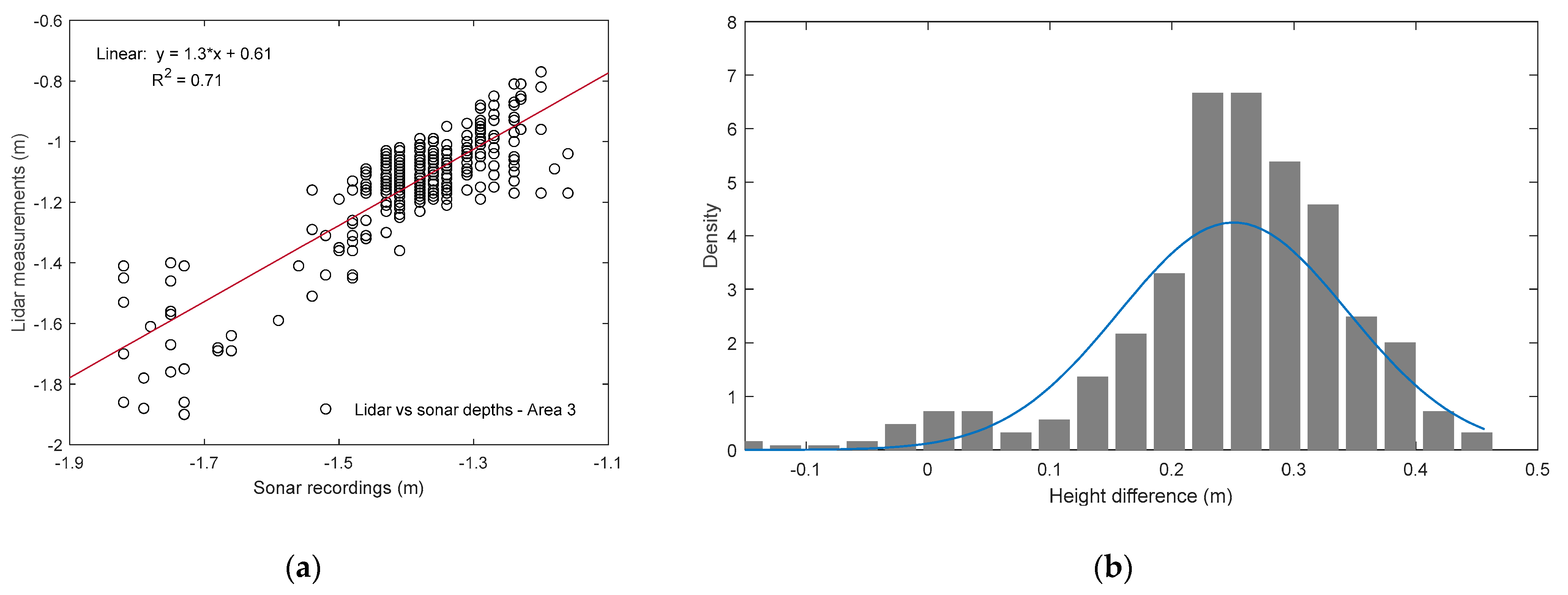
- In Area-3, deeper bottom and poor water quality were observed. The Secchi disk depths were recorded between 0.7 and 1.3 m, and we sampled turbidity at 10.5 NTU; hence, lidar beam amplitudes were insufficient to measure the lagoon bottom. With default threshold parameters, the comparison algorithm produced unreliable results; consequently, we applied looser values to the experiment (dS1i = 10 m) and the algorithm included more legitimate matches. As a result, the matching efficiency dropped (8%), and generated a linear agreement (R2 = 0.71). The mean lidar depth was −1.14 m MSL, and sonar measured deeper at −1.39 m MSL (Figure 11a,b).
4.5. Satellite-Derived Bathymetry versus Lidar Bathymetry
5. Discussion
6. Conclusions
- Measuring the lagoon bottom with airborne lidar has practical and theoretical limitations. This advanced technology is expensive but effective and produces highly detailed vector data. Therefore, we suggest that researchers should carefully study local environmental conditions and modify survey areas before the data acquisition campaign.
- In-situ campaigns are an essential practice of mapping with airborne lidar bathymetry. As demonstrated, we recommend careful planning and executing in-situ campaigns with airborne missions. Sonar surveys are invaluable to confirm the bottom (or depth) measurements attained by airborne lidar; however, sonar units require calibration to align with the survey location’s environmental conditions.
- Our study highlights the need to conduct satellite imaging analysis before surveying estuaries and oceanic areas using an airborne lidar system applicable to large inland water reservoirs. Analysts can estimate and modify their survey requirements with the resultant pixel reflectance analysis and predict the areas with low water quality that may directly influence the remotely sensed bottom measurements.
- Airborne lidar bathymetry is more detailed compared to SDB. Coarse grid sampling of satellite bathymetry limited a comprehensive depth comparison and cross-use of datasets. However, the study results indicated adequate agreement between the measurements, particularly in the relatively transparent sections of the lagoon.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| UTM E | Universal Transverse Mercator–Easting (m) |
| UTM N | Universal Transverse Mercator–Northing (m) |
| Avg. NTU | Average measured turbidity in nephelometric turbidity unit |
| Secchi | Observed Secchi disk depth (m) |
| Kd | Diffuse attenuation coefficient |
| VB | Water bottom is visible to the observer |
| WP | Waypoint location marked for a sonar measurement (observer-triggered measurement) |
| Avg. sonar depth | Average depth of all sonar measurements in a 1 m radius (automatically derived) |
| CL0 | Lidar vector data, Class 0, surface, NIR + green wavelength |
| CL7 | Lidar vector data, Class 7, bottom, green wavelength, standard bathymetric algorithm |
| CL10 | Lidar vector data, Class 10, bottom, green wavelength, enhanced bathymetric algorithm |
| N/A | Not Applicable |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location | Survey Area | Date | UTM E | UTM N | Reading 1 | Reading 2 | Reading 3 | AVG NTU | Secchi (m) | Kd | WP SNR Depth (m) | Avg. SNR Depth (m) | Lidar Depth CL0–CL7 (m) | Lidar Depth CL0–CL10 (m) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 2 | 1 | 2017-05-01 | 681,989.95 | 2,891,306.11 | 0.60 | 0.70 | 0.61 | 0.64 | VB | N/A | 1.49 | 1.13 | 1.06 | N/A |
| 3 | 2017-05-01 | 682,546.59 | 2,891,234.73 | 2.21 | 2.49 | 2.81 | 2.50 | VB | N/A | 1.85 | 1.83 | 1.08 | 2.16 | |
| 4 | 2017-05-01 | 681,723.88 | 2,891,259.92 | 2.10 | 2.02 | 2.01 | 2.04 | VB | N/A | 1.26 | 1.29 | 1.34 | 1.53 | |
| 5 | 2017-05-01 | 680,939.15 | 2,891,230.51 | 2.38 | 2.99 | 2.79 | 2.72 | VB | N/A | 1.38 | 1.38 | 1.42 | 1.50 | |
| 6 | 2017-05-01 | 681,101.49 | 2,890,944.68 | 1.60 | 1.81 | 1.99 | 1.80 | VB | N/A | 1.35 | 1.38 | 1.40 | 1.47 | |
| 7 | 2017-05-01 | 681,434.53 | 2,890,731.42 | 1.90 | 2.16 | 2.24 | 2.10 | VB | N/A | 1.38 | 1.30 | 1.23 | 1.41 | |
| 8 | 2017-05-01 | 681,985.00 | 2,890,432.00 | 2.82 | 3.70 | 4.55 | 3.69 | VB | N/A | 1.33 | 1.33 | 1.37 | 1.47 | |
| 9 | 2017-05-01 | 682,282.75 | 2,890,039.69 | 2.81 | 3.18 | 3.26 | 3.08 | VB | N/A | N/A | 1.27 | 1.34 | 1.59 | |
| 10 | 2017-05-01 | 681,075.64 | 2,889,328.48 | 1.75 | 1.52 | 1.99 | 1.75 | VB | N/A | 1.19 | 1.22 | 1.11 | 1.40 | |
| 11 | 2017-05-01 | 680,624.58 | 2,888,914.09 | 3.36 | 3.62 | 4.10 | 3.69 | VB | N/A | 1.28 | 1.33 | 0.05 | N/A | |
| 12 | 2017-05-01 | 680,311.53 | 2,889,005.78 | 4.64 | 5.26 | 5.68 | 5.19 | VB | N/A | 1.45 | 1.44 | 1.44 | 1.63 | |
| 13 | 2 | 2017-05-05 | 678,831.78 | 2,894,403.48 | 1.31 | 1.51 | 1.59 | 1.47 | VB | N/A | 1.28 | 1.25 | 1.37 | N/A |
| 14 | 2017-05-05 | 678,364.02 | 2,894,849.48 | 1.34 | 1.82 | 1.81 | 1.66 | VB | N/A | 1.19 | 1.21 | 1.35 | 1.38 | |
| 15 | 2017-05-05 | 677,943.08 | 2,895,043.14 | 2.79 | 2.93 | 3.39 | 3.04 | VB | N/A | 1.23 | 1.23 | 1.13 | N/A | |
| 16 | 2017-05-05 | 677,471.31 | 2,895,420.79 | 3.66 | 7.90 | 8.02 | 6.53 | VB | N/A | 1.40 | 1.40 | 1.49 | 1.63 | |
| 17 | 2017-05-05 | 677,293.56 | 2,895,990.83 | 3.78 | 11.50 | 12.20 | 9.16 | VB | N/A | 1.26 | 1.42 | N/A | 1.85 | |
| 18 | 2017-05-05 | 676,829.28 | 2,896,189.47 | 15.90 | 17.30 | 19.30 | 17.50 | 0.6 | 2.67 | 1.61 | 1.63 | N/A | 2.17 | |
| 19 | 2017-05-05 | 677,032.68 | 2,897,036.17 | 10.20 | 15.50 | 16.40 | 14.03 | 0.7 | 2.29 | 1.52 | 1.53 | N/A | 1.97 | |
| 20 | 2017-05-05 | 677,611.28 | 2,897,369.09 | 7.57 | 9.04 | 11.00 | 9.20 | 0.85 | 1.88 | 1.38 | 1.35 | 1.54 | 1.22 | |
| 21 | 2017-05-05 | 677,341.54 | 2,898,209.33 | 4.27 | 4.95 | 5.52 | 4.91 | VB | N/A | 1.45 | 1.41 | 1.67 | 1.72 | |
| 22 | 2017-05-05 | 676,915.17 | 2,897,588.56 | 8.69 | 11.50 | 12.30 | 10.83 | 0.7 | 2.29 | 1.57 | 1.54 | 1.27 | 1.59 | |
| 23 | 2017-05-05 | 677,020.09 | 2,896,493.08 | 10.50 | 12.80 | 12.70 | 12.00 | 0.9 | 1.78 | 1.57 | 1.57 | N/A | 2.58 | |
| 24 | 2017-05-05 | 676,501.32 | 2,895,309.69 | 14.00 | 18.90 | 19.70 | 17.53 | 0.8 | 2.00 | 1.66 | 1.67 | N/A | N/A | |
| 25 | 2017-05-05 | 677,336.30 | 2,894,813.24 | 3.85 | 3.43 | 3.90 | 3.73 | VB | N/A | 1.42 | 1.42 | 1.51 | 1.73 | |
| 26 | 3 | 2017-05-12 | 672,597.73 | 2,888,097.92 | 11.10 | 15.70 | 16.70 | 14.50 | 0.7 | 2.29 | 1.83 | 1.79 | N/A | 1.96 |
| 27 | 2017-05-12 | 673,745.52 | 2,887,921.14 | 11.10 | 17.10 | 21.70 | 16.63 | 0.7 | 2.29 | 1.97 | 1.97 | N/A | 2.04 | |
| 28 | 2017-05-12 | 674,964.06 | 2,887,817.43 | 9.48 | 13.50 | 16.10 | 13.03 | 0.7 | 2.29 | 1.90 | 1.90 | N/A | N/A | |
| 29 | 2017-05-12 | 676,179.75 | 2,887,926.15 | 8.91 | 11.90 | 12.10 | 10.97 | 0.85 | 1.88 | 2.13 | 2.15 | N/A | N/A | |
| 30 | 2017-05-12 | 676,968.38 | 2,888,786.30 | 3.12 | 4.00 | 5.05 | 4.06 | 1.3 | 1.23 | 1.52 | 1.51 | 1.25 | 1.45 | |
| 31 | 2017-05-12 | 675,270.36 | 2,888,720.85 | 9.03 | 15.80 | 19.00 | 14.61 | 0.7 | 2.29 | 1.92 | 1.94 | N/A | N/A | |
| 32 | 2017-05-12 | 674,052.80 | 2,888,881.79 | 10.80 | 13.40 | 13.20 | 12.47 | 0.8 | 2.00 | 2.02 | 2.01 | N/A | 1.86 | |
| 33 | 2017-05-12 | 674,961.02 | 2,889,283.61 | 15.20 | 15.00 | 16.50 | 15.57 | 0.75 | 2.13 | 2.06 | 2.02 | N/A | N/A | |
| 34 | 2017-05-12 | 676,290.01 | 2,889,264.61 | 5.44 | 8.22 | 9.33 | 7.66 | 1 | 1.60 | 1.90 | 1.89 | N/A | 2.61 | |
| 35 | 2017-05-12 | 676,841.89 | 2,889,261.02 | 1.80 | 2.80 | 3.09 | 2.56 | VB | N/A | 1.59 | 1.55 | 1.33 | 1.51 | |
| 36 | 2017-05-12 | 677,419.18 | 2,889,228.25 | 2.47 | 3.33 | 4.08 | 3.29 | VB | N/A | 1.59 | 1.54 | 1.33 | 1.48 |
Appendix B. Lidar Bathymetry Waveform Classes

References
- Höfle, B.; Rutzinger, M. Topographic Airborne LiDAR in Geomorphology: A Technological Perspective. Z. Für Geomorphol. 2011, 55, 1–29. [Google Scholar] [CrossRef]
- Lohani, B.; Ghosh, S. Airborne LiDAR Technology: A Review of Data Collection and Processing Systems. Proc. Natl. Acad. Sci. India Sect. A Phys. Sci. 2017, 87, 567–579. [Google Scholar] [CrossRef]
- Guenther, G.C. Airborne Lidar Bathymetry. In Digital Elevation Model Technologies and Applications: The DEM User’s Manual; American Society of Photogrammetry and Remote Sensing, Pennsylvania State University Press: University Park, PA, USA, 2007; pp. 253–320. [Google Scholar]
- Mandlburger, G. Bathymetry from Images, LiDAR, and Sonar: From Theory to Practice. PFG–J. Photogramm. Remote Sens. Geoinf. Sci. 2021, 89, 69–70. [Google Scholar] [CrossRef]
- Brock, J.C.; Purkis, S.J. The Emerging Role of Lidar Remote Sensing in Coastal Research and Resource Management. J. Coast. Res. 2009, 10053, 1–5. [Google Scholar] [CrossRef]
- Klemas, V. Beach Profiling and Lidar Bathymetry: An Overview with Case Studies. J. Coast. Res. 2011, 277, 1019–1028. [Google Scholar] [CrossRef]
- Paine, J.G.; Caudle, T.L.; Andrews, J.R. Shoreline and Sand Storage Dynamics from Annual Airborne LIDAR Surveys, Texas Gulf Coast. J. Coast. Res. 2017, 333, 487–506. [Google Scholar] [CrossRef]
- Toure, S.; Diop, O.; Kpalma, K.; Maiga, A. Shoreline Detection Using Optical Remote Sensing: A Review. ISPRS Int. J. Geo-Inf. 2019, 8, 75. [Google Scholar] [CrossRef]
- Dogliotti, A.I.; Ruddick, K.G.; Nechad, B.; Doxaran, D.; Knaeps, E. A Single Algorithm to Retrieve Turbidity from Remotely Sensed Data in All Coastal and Estuarine Waters. Remote Sens. Environ. 2015, 156, 157–168. [Google Scholar] [CrossRef]
- Garg, V.; Senthil Kumar, A.; Aggarwal, S.P.; Kumar, V.; Dhote, P.R.; Thakur, P.K.; Nikam, B.R.; Sambare, R.S.; Siddiqui, A.; Muduli, P.R.; et al. Spectral Similarity Approach for Mapping Turbidity of an Inland Waterbody. J. Hydrol. 2017, 550, 527–537. [Google Scholar] [CrossRef]
- Caballero, I.; Stumpf, R.P. Retrieval of Nearshore Bathymetry from Sentinel-2A and 2B Satellites in South Florida Coastal Waters. Estuar. Coast. Shelf Sci. 2019, 226, 106277. [Google Scholar] [CrossRef]
- Ji, X.; Yang, B.; Tang, Q.; Xu, W.; Li, J. Feature Fusion-Based Registration of Satellite Images to Airborne LiDAR Bathymetry in Island Area. Int. J. Appl. Earth Obs. Geoinf. 2022, 109, 102778. [Google Scholar] [CrossRef]
- Yeu, Y.; Yee, J.-J.; Yun, H.; Kim, K. Evaluation of the Accuracy of Bathymetry on the Nearshore Coastlines of Western Korea from Satellite Altimetry, Multi-Beam, and Airborne Bathymetric LiDAR. Sensors 2018, 18, 2926. [Google Scholar] [CrossRef]
- Saylam, K.; Hupp, J.; Andrews, J.; Averett, A.; Knudby, A. Quantifying Airborne Lidar Bathymetry Quality-Control Measures: A Case Study in Frio River, Texas. Sensors 2018, 18, 4153. [Google Scholar] [CrossRef] [PubMed]
- Saylam, K.R.; Averett, A.; Costard, L.; D. Wolaver, B.; Robertson, S. Multi-Sensor Approach to Improve Bathymetric Lidar Mapping of Semi-Arid Groundwater-Dependent Streams: Devils River, Texas. Remote Sens. 2020, 12, 2491. [Google Scholar] [CrossRef]
- McManus, J. Hydrodynamics of Estuaries Edited by Bjorn Kjerfve, Vol II Estuarine Case Studies, CRC Press, 1988. No. of Pages: 125. Earth Surf. Process. Landf. 1990, 15, 384–385. [Google Scholar] [CrossRef]
- Tunnell, J.W.; Judd, F.W. (Eds.) The Laguna Madre of Texas and Tamaulipas, 1st ed.; Gulf Coast studies; Texas A&M University Press: College Station, TX, USA, 2002; ISBN 978-1-58544-133-4. [Google Scholar]
- Dubin, J.T.; Ballard, M.S.; Lee, K.M.; McNeese, A.R.; Sagers, J.D.; Venegas, G.R.; Rahman, A.F.; Wilson, P.S. Compressional and Shear in Situ Measurements in the Lower Laguna Madre. J. Acoust. Soc. Am. 2018, 143, 1712. [Google Scholar] [CrossRef]
- Webster, T.; McGuigan, K.; Crowell, N.; Collins, K.; McDonald, C. Acquisition and Processing of Topo-Bathymetric Lidar for Isle Madame in Support of the World Class Tanker Safety Initiative; NSCC Applied Geomatics Research Group: Middleton, NS, USA, 2015; pp. 1–56. [Google Scholar]
- Kinzel, P.J.; Wright, C.W.; Nelson, J.M.; Burman, A.R. Evaluation of an Experimental LiDAR for Surveying a Shallow, Braided, Sand-Bedded River. J. Hydraul. Eng. 2007, 133, 838–842. [Google Scholar] [CrossRef]
- Estrada, J. Investigating the Effects of Nutrient Limitation, Light, and Salinity upon Seagrass Cover in the Lower Laguna Madre; GIS in Water Resources; The University of Texas at Austin: Austin, TX, USA, 2018; p. 11. [Google Scholar]
- Medwin, H. Speed of Sound in Water: A Simple Equation for Realistic Parameters. J. Acoust. Soc. Am. 1975, 58, 1318–1319. [Google Scholar] [CrossRef]
- Habib, A. Accuracy, Quality Assurance and Quality Control of Lidar Data. In Topographic Laser Ranging and Scanning: Principles and Processing; Taylor & Francis: Boca Raton, FL, USA, 2009; pp. 269–294. ISBN 978-1-4200-5142-1. [Google Scholar]
- Boris, Delaunay, Sur la sphere vide. Izv. Akad. Nauk SSSR Otdelenie Matematicheskii i Estestvennyka Nauk 1934, 7, 793–800.
- Quan, X.; Fry, E.S. Empirical Equation for the Index of Refraction of Sea Water. Appl. Opt. 1995, 34, 3477. [Google Scholar] [CrossRef]
- Roswell, A.; Halikas, G. The Index of Refraction of Seawater; University of California San Diego, Scripps Institution of Oceanography: La Jolla, CA, USA, 1976; p. 121. [Google Scholar]
- Mondejar, J.P.; Tongco, A.F. Estimating Topsoil Texture Fractions by Digital Soil Mapping—A Response to the Long-Outdated Soil Map in the Philippines. Sustain. Environ. Res. 2019, 29, 31. [Google Scholar] [CrossRef]
- Ashphaq, M.; Srivastava, P.K.; Mitra, D. Review of Near-Shore Satellite Derived Bathymetry: Classification and Account of Five Decades of Coastal Bathymetry Research. J. Ocean Eng. Sci. 2021, 6, 340–359. [Google Scholar] [CrossRef]
- Saylam, K.; Brown, R.A.; Hupp, J.R. Assessment of Depth and Turbidity with Airborne Lidar Bathymetry and Multiband Satellite Imagery in Shallow Water Bodies of the Alaskan North Slope. Int. J. Appl. Earth Obs. Geoinf. 2017, 58, 191–200. [Google Scholar] [CrossRef]
- Gernez, P.; Lafon, V.; Lerouxel, A.; Curti, C.; Lubac, B.; Cerisier, S.; Barillé, L. Toward Sentinel-2 High Resolution Remote Sensing of Suspended Particulate Matter in Very Turbid Waters: SPOT4 (Take5) Experiment in the Loire and Gironde Estuaries. Remote Sens. 2015, 7, 9507–9528. [Google Scholar] [CrossRef]
- Delegido, J.; Verrelst, J.; Alonso, L.; Moreno, J. Evaluation of Sentinel-2 Red-Edge Bands for Empirical Estimation of Green LAI and Chlorophyll Content. Sensors 2011, 11, 7063–7081. [Google Scholar] [CrossRef] [PubMed]
- Sebastiá-Frasquet, M.-T.; Aguilar-Maldonado, J.A.; Santamaría-Del-Ángel, E.; Estornell, J. Sentinel 2 Analysis of Turbidity Patterns in a Coastal Lagoon. Remote Sens. 2019, 11, 2926. [Google Scholar] [CrossRef]
- Ahmad, A.; Sufahani, S.F. Analysis of Landsat 5 TM Data of Malaysian Land Covers Using ISODATA Clustering Technique. In Proceedings of the 2012 IEEE Asia-Pacific Conference on Applied Electromagnetics (APACE), Melaka, Malaysia, 11–13 December 2012; IEEE: Melaka, Malaysia, 2012; pp. 92–97. [Google Scholar]
- Yuan, C.; Yang, H. Research on K-Value Selection Method of K-Means Clustering Algorithm. Multidiscip. Sci. J. 2019, 2, 226–235. [Google Scholar] [CrossRef]
- Wang, X.; Ling, F.; Yao, H.; Liu, Y.; Xu, S. Unsupervised Sub-Pixel Water Body Mapping with Sentinel-3 OLCI Image. Remote Sens. 2019, 11, 327. [Google Scholar] [CrossRef]
- Kaplan, G.; Avdan, U. Object-Based Water Body Extraction Model Using Sentinel-2 Satellite Imagery. Eur. J. Remote Sens. 2017, 50, 137–143. [Google Scholar] [CrossRef]
- de Carvalho, O.; Guimarães, R.; Silva, N.; Gillespie, A.; Gomes, R.; Silva, C.; de Carvalho, A. Radiometric Normalization of Temporal Images Combining Automatic Detection of Pseudo-Invariant Features from the Distance and Similarity Spectral Measures, Density Scatterplot Analysis, and Robust Regression. Remote Sens. 2013, 5, 2763–2794. [Google Scholar] [CrossRef]
- Favoretto, F.; Morel, Y.; Waddington, A.; Lopez-Calderon, J.; Cadena-Roa, M.; Blanco-Jarvio, A. Testing of the 4SM Method in the Gulf of California Suggests Field Data Are Not Needed to Derive Satellite Bathymetry. Sensors 2017, 17, 2248. [Google Scholar] [CrossRef] [PubMed]
- Stumpf, R.P.; Holderied, K.; Sinclair, M. Determination of Water Depth with High-Resolution Satellite Imagery over Variable Bottom Types. Limnol. Oceanogr. 2003, 48, 547–556. [Google Scholar] [CrossRef]
- Saylam, K.; Hupp, J.R.; Aaron, R.A. Quantifying the Bathymetry of the Lower Colorado River Basin, Arizona, with Airborne Lidar; researchgate: Baltimore, MD, USA, 2017; Volume 1, pp. 1–11. [Google Scholar]
- Savitzky, A.; Golay, M.J.E. Smoothing and Differentiation of Data by Simplified Least Squares Procedures. Anal. Chem. 1964, 36, 1627–1639. [Google Scholar] [CrossRef]
- IHO. International Hydrographic Organization, Standards for Hydrographic Surveys; International Hydrographic Bureau: Monaco City, Monaco, 2020; pp. 1–51. [Google Scholar]




| Item | NIR (1064 nm) | Green (515 nm) |
|---|---|---|
| Pulse repetition rate (PRF) | 100–300 kHz | 36 kHz |
| Average lidar point density | 10 points/m2 (+side overlap) | 2 points/m2 (+side overlap) |
| Average flight altitude | 400–600 m | |
| Swath width and overlap rate | 250–300 m/30% overlap | |
| Average aircraft survey speed | 110–130 knots | |
| Date | Sensing Time (UTC) | Tile | Sun Elevation (Degrees) | Sun Azimuth (Degrees) | Cloud Coverage (%) |
|---|---|---|---|---|---|
| 12/05/2016 | 17:11:44 | T14RPQ | 72 | 113.6 | 20 |
| 12/05/2016 | 17:11:44 | T14RPP | 72.3 | 111.1 | 24 |
| 16/06/2017 | 17:15:05 | T14RPQ | 72.9 | 96.9 | 6 |
| 16/06/2017 | 17:15:05 | T14RPP | 73 | 94 | 6 |
| 17/05/2018 | 17:10:16 | T14RPQ | 72.4 | 110.5 | 0 |
| 17/05/2018 | 17:10:16 | T14RPP | 72.8 | 107.9 | 0 |
| 27/05/2019 | 17:16:29 | T14RPQ | 73.1 | 104.5 | 25 |
| 27/05/2019 | 17:16:43 | T14RPP | 73.3 | 101.6 | 16 |
| In-Situ Area | Number of Measurements (Class 7/10) | Mean Sonar Depth (m, MSL) | Mean Lidar Depth (m, MSL) (Class 7/10) (Class 7/10) | Standard Deviation (m) (Class 7/10) | Bathymetric Improvement (%) |
|---|---|---|---|---|---|
| 1 | 256/130 | −1.35 | −1.28/−1.57 | 0.14/0.23 | 23 |
| 2 | 381/140 | −1.43 | −1.42/−1.78 | 0.17/0.38 | 20.2 |
| 3 | 551/272 | −1.84 | −1.35/−1.84 | 0.62/0.63 | 41.2 |
| In-Situ Area | Mean Turbidity (NTU) | Number of Returns (Class 0/5) | Median Difference (m) (Class 0 to 5) | RMSE (m) (Class 0 to 5) | R2 |
|---|---|---|---|---|---|
| 1 | 2.7 | 528/173 | −0.07 | 0.03 | 0.94 |
| 2 | 8.6 | 907/653 | −0.09 | 0.06 | 0.65 |
| 3 | 10.5 | 806/420 | −0.11 | 0.08 | 0.32 |
| Scanner | Number of Samples | Data Range (m) | Median (m) | RMSE (m) | R2 |
|---|---|---|---|---|---|
| NIR (1064 nm) | 448 | 0.14 | 0.025 | 0.025 | 0.96 |
| Green (515 nm) | 448 | 0.17 | −0.013 | 0.028 | 0.95 |
| Imagery | Pixel Reflectance Count (%) | ||||||
|---|---|---|---|---|---|---|---|
| 1-Low | 2-Mixed | 3-Moderate-Low | 4-Moderate-High | 5-High | 6-Unclassified/Cloud | N/A | |
| 2016 | 4.16 | 5.79 | 6.11 | 2.97 | 0.58 | 0.09 | 80.31 |
| 2017 | 1.05 | 6.02 | 5.58 | 3.18 | 1.05 | 0.04 | 83.07 |
| 2018 | 3.94 | 5.68 | 5.51 | 4.08 | 1.14 | 0.14 | 79.50 |
| 2019 | 4.33 | 4.91 | 5.37 | 2.66 | 1.18 | 0.09 | 81.47 |
| In-Situ Area | Mean Turbidity (NTU) | Comparison Parameters (dSli, h, Slope Angle) | Matching (%) | Mean Depth (dL/dS, m, MSL) | Difference (dL–dS, m) | RMSE (m) | R2 |
|---|---|---|---|---|---|---|---|
| 1 | 2.7 | 5/1/45 | 55 | −0.87/−0.92 | −0.05 | 0.14 | 0.68 |
| 2 | 8.6 | 5/1/45 | 40 | −1.09/−1.23 | −0.14 | 0.10 | 0.38 |
| 3 | 10.5 | 10/1/45 | 8 | −1.14/−1.39 | −0.25 | 0.09 | 0.71 |
| In-Situ Area | Pixel Reflectance Category | Mean Turbidity (NTU) | Comparison Parameters (dSli, h, Slope Angle) | Correlation (%) | Mean ALB (m, MSL) | Mean SDB (m, MSL) | Mean Difference (dL–dS, m) | RMSE (m) |
|---|---|---|---|---|---|---|---|---|
| 1 | 1-Low | 2.7 | 5/0.5/45 | 46 | −0.86 | −0.99 | −0.13 | 0.15 |
| 1 | 1-Low | 2.7 | 10/0.5/45 | 66 | −0.88 | −0.99 | −0.11 | 0.14 |
| 2 | 2-Mixed | 8.6 | 5/0.5/45 | 42 | −1.06 | −1.05 | 0.01 | 0.14 |
| 2 | 2-Mixed | 8.6 | 10/0.5/45 | 61 | −1.06 | −1.04 | 0.02 | 0.15 |
| 3 | N/A | 10.5 | N/A | |||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saylam, K.; Briseno, A.; Averett, A.R.; Andrews, J.R. Analysis of Depths Derived by Airborne Lidar and Satellite Imaging to Support Bathymetric Mapping Efforts with Varying Environmental Conditions: Lower Laguna Madre, Gulf of Mexico. Remote Sens. 2023, 15, 5754. https://doi.org/10.3390/rs15245754
Saylam K, Briseno A, Averett AR, Andrews JR. Analysis of Depths Derived by Airborne Lidar and Satellite Imaging to Support Bathymetric Mapping Efforts with Varying Environmental Conditions: Lower Laguna Madre, Gulf of Mexico. Remote Sensing. 2023; 15(24):5754. https://doi.org/10.3390/rs15245754
Chicago/Turabian StyleSaylam, Kutalmis, Alejandra Briseno, Aaron R. Averett, and John R. Andrews. 2023. "Analysis of Depths Derived by Airborne Lidar and Satellite Imaging to Support Bathymetric Mapping Efforts with Varying Environmental Conditions: Lower Laguna Madre, Gulf of Mexico" Remote Sensing 15, no. 24: 5754. https://doi.org/10.3390/rs15245754
APA StyleSaylam, K., Briseno, A., Averett, A. R., & Andrews, J. R. (2023). Analysis of Depths Derived by Airborne Lidar and Satellite Imaging to Support Bathymetric Mapping Efforts with Varying Environmental Conditions: Lower Laguna Madre, Gulf of Mexico. Remote Sensing, 15(24), 5754. https://doi.org/10.3390/rs15245754