
Spatial and Spectral Translation of Landsat 8 to Sentinel-2 Using Conditional Generative Adversarial Networks



Abstract
:1. Introduction
2. Materials and Methods
2.1. Landsat 8 and Sentinel-2 Scenes
2.2. Training Dataset Preparation
2.3. Methodology
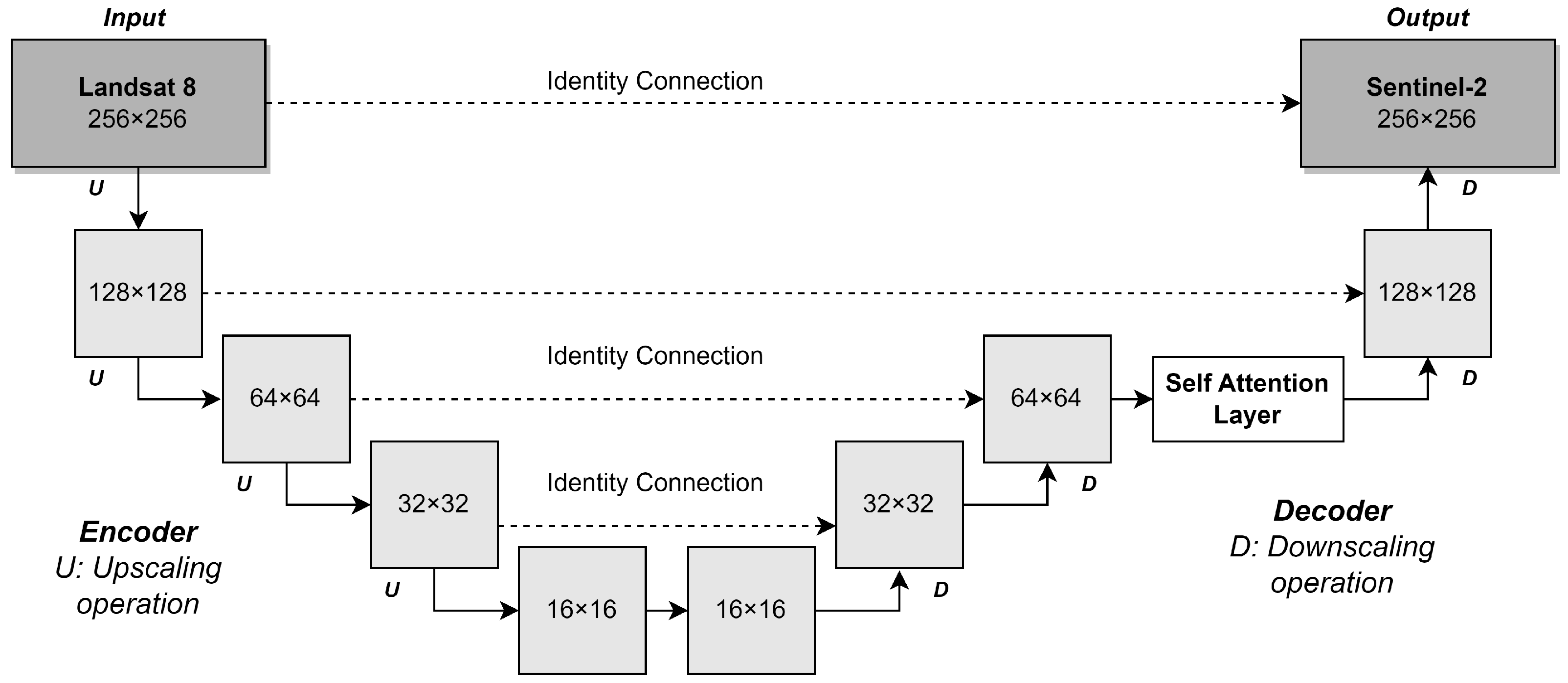
2.4. Conditional Generative Adversarial Network
2.5. Method Comparison and Evaluation
3. Results
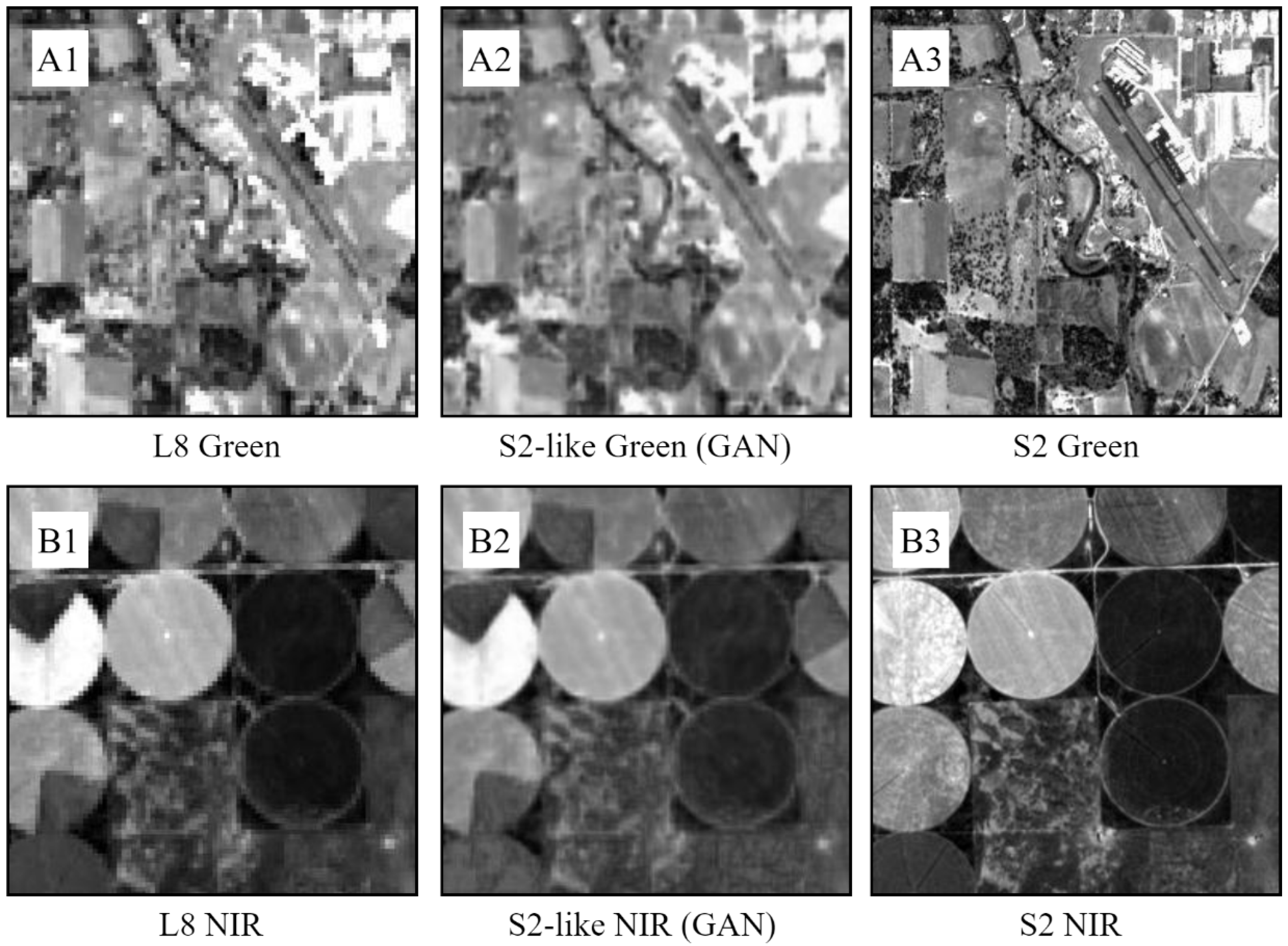
3.1. Translating S2-like Green and NIR Spectral Bands from L8
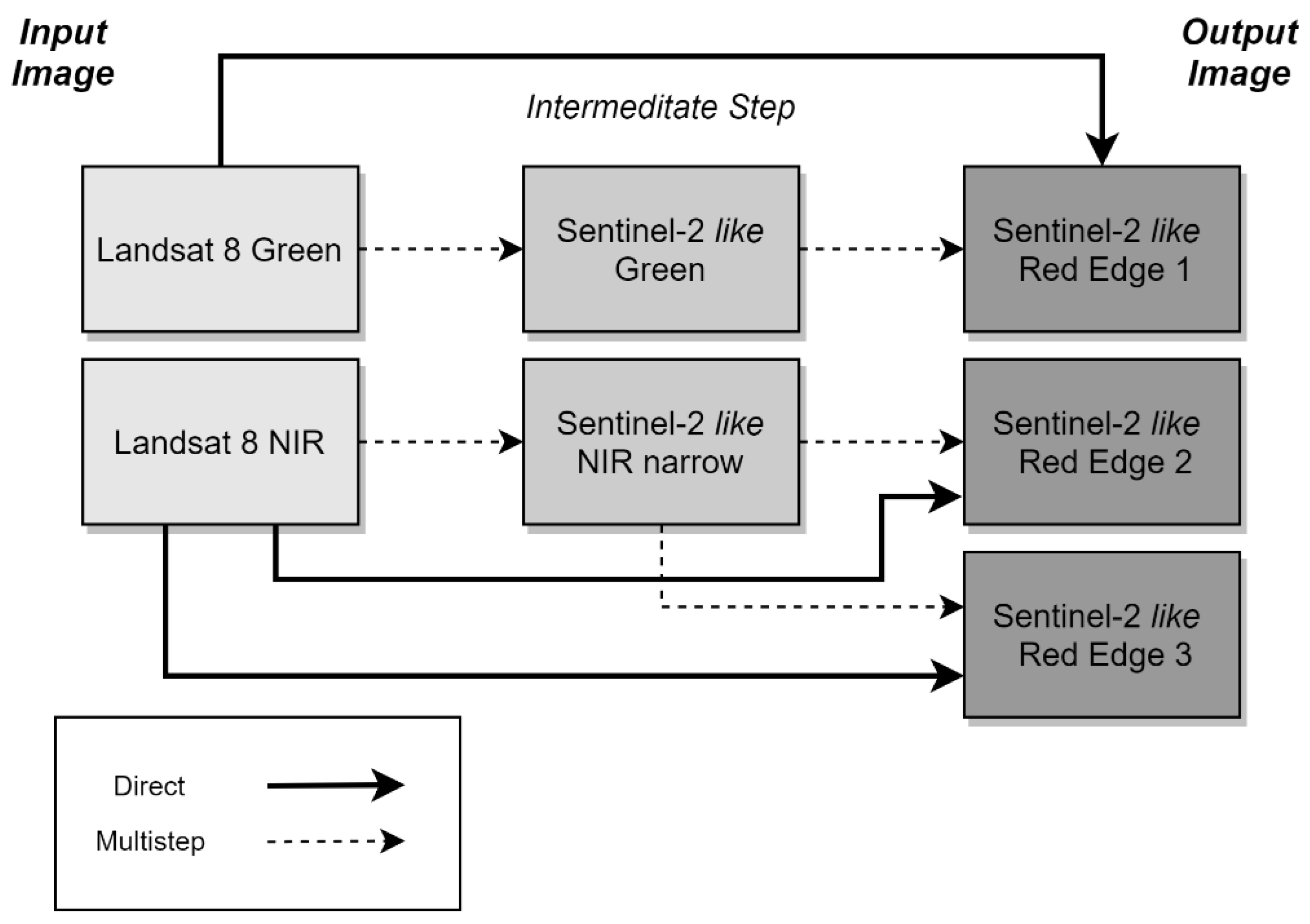
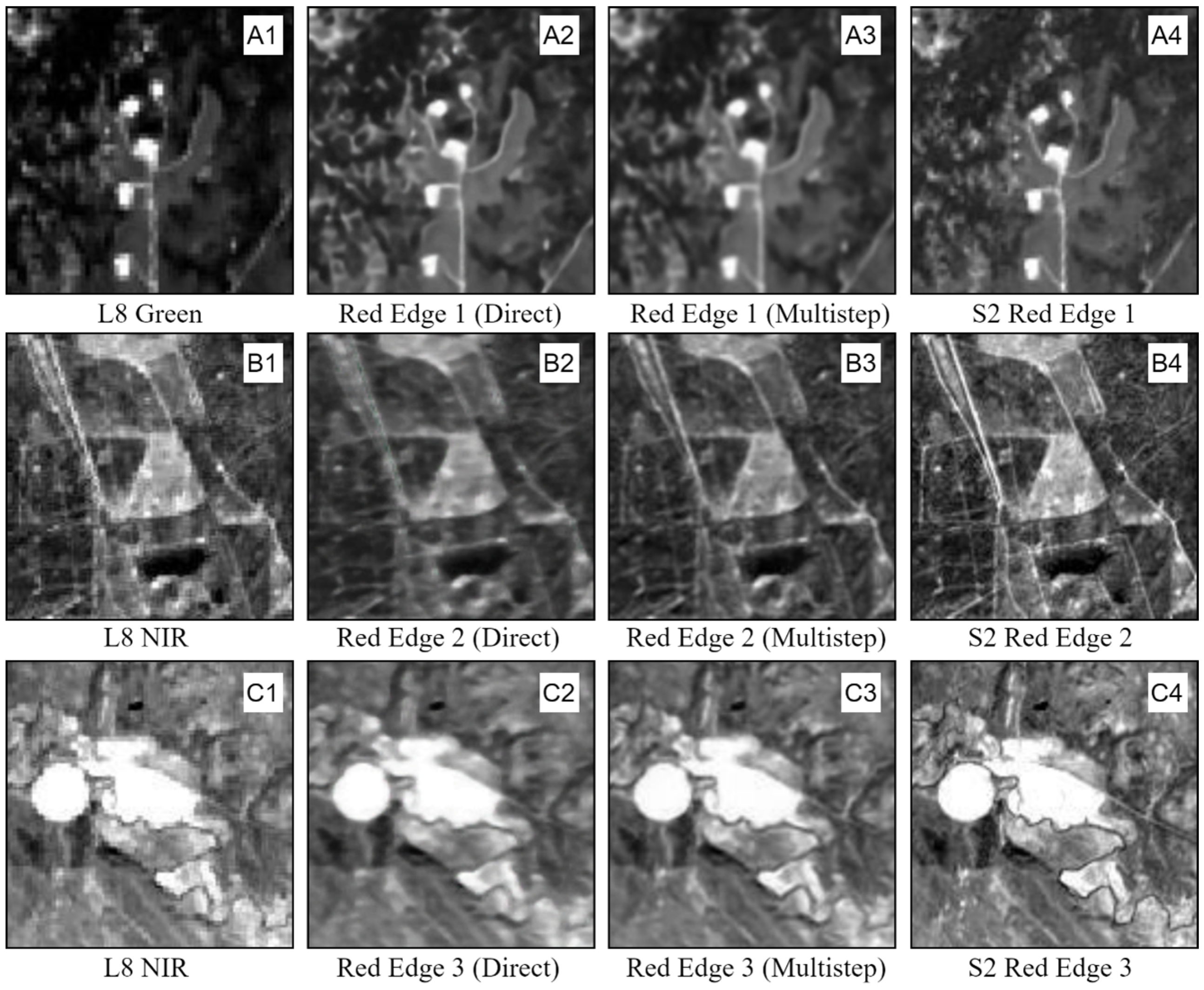
3.2. Translating S2-like RE1, RE2, and RE3 Bands from L8
4. Discussion
4.1. CGAN Performance towards Predicting S2-like Spectral Bands
4.2. Improving CGAN Performance
4.3. Advantages of CGANs over CNNs
4.4. Limitations of CGANs
4.5. Future Work
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wulder, M.A.; Hilker, T.; White, J.C.; Coops, N.C.; Masek, J.G.; Pflugmacher, D.; Crevier, Y. Virtual Constellations for Global Terrestrial Monitoring. Remote Sens. Environ. 2015, 170, 62–76. [Google Scholar] [CrossRef]
- Justice, C.O.; Townshend, J.R.G.; Vermote, E.F.; Masuoka, E.; Wolfe, R.E.; Saleous, N.; Morisette, J.T. An overview of MODIS Land data processing and product status. Remote Sens. Environ. 2002, 83, 3–15. [Google Scholar] [CrossRef]
- Zhu, X.; Helmer, E.H.; Gao, F.; Liu, D.; Chen, J.; Lefsky, M.A. A Flexible Spatiotemporal Method for Fusing Satellite Images with Different Resolutions. Remote Sens. Environ. 2016, 172, 165–177. [Google Scholar] [CrossRef]
- Li, J.; Roy, D.P. A global analysis of Sentinel-2A, Sentinel-2B and Landsat-8 data revisit intervals and implications for terrestrial monitoring. Remote Sens. 2017, 9, 902. [Google Scholar]
- Trishchenko, A.P. Clear-Sky Composites over Canada from Visible Infrared Imaging Radiometer Suite: Continuing MODIS Time Series into the Future. Can. J. Remote Sens. 2019, 45, 276–289. [Google Scholar] [CrossRef]
- Liang, J.; Liu, D. An Unsupervised Surface Water Un-Mixing Method Using Landsat and Modis Images for Rapid Inundation Observation. In Proceedings of the IGARSS 2019-2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 9384–9387. [Google Scholar]
- Mandanici, E.; Bitelli, G. Preliminary Comparison of Sentinel-2 And Landsat 8 Imagery for A Combined Use. Remote Sens. 2016, 8, 1014. [Google Scholar]
- Chastain, R.; Housman, I.; Goldstein, J.; Finco, M.; Tenneson, K. Empirical Cross Sensor Comparison of Sentinel-2A And 2B MSI, Landsat-8 OLI, And Landsat-7 ETM+ Top of Atmosphere Spectral Characteristics over the Conterminous United States. Remote Sens. Environ. 2019, 221, 274–285. [Google Scholar] [CrossRef]
- Piedelobo, L.; Hernández-López, D.; Ballesteros, R.; Chakhar, A.; Del Pozo, S.; González-Aguilera, D.; Moreno, M.A. Scalable Pixel-Based Crop Classification Combining Sentinel-2 And Landsat-8 Data Time Series: Case Study of the Duero River Basin. Agric. Syst. 2019, 171, 36–50. [Google Scholar] [CrossRef]
- Zhang, Y.; Ling, F.; Wang, X.; Foody, G.M.; Boyd, D.S.; Li, X.; Atkinson, P.M. Tracking small-scale tropical forest disturbances: Fusing the Landsat and Sentinel-2 data record. Remote Sens. Environ. 2021, 261, 112470. [Google Scholar] [CrossRef]
- Silvero, N.E.Q.; Demattê, J.A.M.; Amorim, M.T.A.; Dos Santos, N.V.; Rizzo, R.; Safanelli, J.L.; Bonfatti, B.R. Soil Variability and Quantification Based on Sentinel-2 And Landsat-8 Bare Soil Images: A Comparison. Remote Sens. Environ. 2021, 252, 112117. [Google Scholar] [CrossRef]
- Hao, P.Y.; Tang, H.J.; Chen, Z.X.; Le, Y.U.; Wu, M.Q. High Resolution Crop Intensity Mapping Using Harmonized Landsat-8 and Sentinel-2 Data. J. Integr. Agric. 2019, 18, 2883–2897. [Google Scholar] [CrossRef]
- Tulbure, M.G.; Broich, M.; Perin, V.; Gaines, M.; Ju, J.; Stehman, S.V.; Betbeder-Matibet, L. Can we detect more ephemeral floods with higher density harmonized Landsat Sentinel 2 data compared to Landsat 8 alone? ISPRS J. Photogramm. Remote Sens. 2022, 185, 232–246. [Google Scholar] [CrossRef]
- Forkuor, G.; Dimobe, K.; Serme, I.; Tondoh, J.E. Landsat-8 Vs. Sentinel-2: Examining the Added Value of Sentinel-2’s Red-Edge Bands to Land-Use and Land-Cover Mapping in Burkina Faso. GISci. Remote Sens. 2018, 55, 331–354. [Google Scholar] [CrossRef]
- Dong, T.; Liu, J.; Shang, J.; Qian, B.; Ma, B.; Kovacs, J.M.; Shi, Y. Assessment Of Red-Edge Vegetation Indices for Crop Leaf Area Index Estimation. Remote Sens. Environ. 2019, 222, 133–143. [Google Scholar] [CrossRef]
- Delegido, J.; Verrelst, J.; Alonso, L.; Moreno, J. Evaluation Of Sentinel-2 Red-Edge Bands for Empirical Estimation of Green LAI And Chlorophyll Content. Sensors 2011, 11, 7063–7081. [Google Scholar] [CrossRef] [PubMed]
- Kaplan, G.; Avdan, U. Evaluating the Utilization of the Red Edge and Radar Bands from Sentinel Sensors for Wetland Classification. Catena 2019, 178, 109–119. [Google Scholar] [CrossRef]
- Chaves, E.D.M.; Picoli, C.A.M.; Sanches, D.I. Recent Applications of Landsat 8/OLI and Sentinel-2/MSI for Land Use and Land Cover Mapping: A Systematic Review. Remote Sens. 2020, 12, 3062. [Google Scholar] [CrossRef]
- Claverie, M.; Masek, J.G.; Ju, J.; Dungan, J.L. Harmonized Landsat-8 Sentinel-2 (HLS) Product User’s Guide; National Aeronautics and Space Administration (NASA): Washington, DC, USA, 2017. [Google Scholar]
- Mulverhill, C.; Coops, N.C.; Achim, A. Continuous monitoring and sub-annual change detection in high-latitude forests using Harmonized Landsat Sentinel-2 data. ISPRS J. Photogramm. Remote Sens. 2023, 197, 309–319. [Google Scholar] [CrossRef]
- Bolton, D.K.; Gray, J.M.; Melaas, E.K.; Moon, M.; Eklundh, L.; Friedl, M.A. Continental-scale land surface phenology from harmonized Landsat 8 and Sentinel-2 imagery. Remote Sens. Environ. 2020, 240, 111685. [Google Scholar] [CrossRef]
- Chen, N.; Tsendbazar, N.E.; Hamunyela, E.; Verbesselt, J.; Herold, M. Sub-annual tropical forest disturbance monitoring using harmonized Landsat and Sentinel-2 data. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102386. [Google Scholar] [CrossRef]
- Shao, Z.; Cai, J.; Fu, P.; Hu, L.; Liu, T. Deep Learning-Based Fusion of Landsat-8 And Sentinel-2 Images for A Harmonized Surface Reflectance Product. Remote Sens. Environ. 2019, 235, 111425. [Google Scholar] [CrossRef]
- Shang, R.; Zhu, Z. Harmonizing Landsat 8 and Sentinel-2: A time-series-based reflectance adjustment approach. Remote Sens. Environ. 2019, 235, 111439. [Google Scholar] [CrossRef]
- Scheffler, D.; Frantz, D.; Segl, K. Spectral Harmonization and Red Edge Prediction of Landsat-8 To Sentinel-2 Using Land Cover Optimized Multivariate Regressors. Remote Sens. Environ. 2020, 241, 111723. [Google Scholar] [CrossRef]
- Isa, S.M.; Suharjito, S.; Kusuma, G.P.; Cenggoro, T.W. Supervised conversion from Landsat-8 images to Sentinel-2 images with deep learning. Eur. J. Remote Sens. 2021, 54, 182–208. [Google Scholar] [CrossRef]
- Pham, V.D.; Bui, Q.T. Spatial resolution enhancement method for Landsat imagery using a Generative Adversarial Network. Remote Sens. Lett. 2021, 12, 654–665. [Google Scholar] [CrossRef]
- Chen, B.; Li, J.; Jin, Y. Deep learning for feature-level data fusion: Higher resolution reconstruction of historical landsat archive. Remote Sens. 2021, 13, 167. [Google Scholar] [CrossRef]
- Goodfellow, I.J.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Bengio, Y. Generative Adversarial Networks. arXiv 2014, arXiv:1406.2661. [Google Scholar] [CrossRef]
- Ledig, C.; Theis, L.; Huszár, F.; Caballero, J.; Cunningham, A.; Acosta, A.; Shi, W. Photo-Realistic Single Image Super-Resolution Using a Generative Adversarial Network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4681–4690. [Google Scholar]
- Quan, D.; Wang, S.; Liang, X.; Wang, R.; Fang, S.; Hou, B.; Jiao, L. Deep Generative Matching Network for Optical and SAR Image Registration. In Proceedings of the IGARSS 2018-2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 6215–6218. [Google Scholar]
- Zhu, L.; Chen, Y.; Ghamisi, P.; Benediktsson, J.A. Generative Adversarial Networks for Hyperspectral Image Classification. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5046–5063. [Google Scholar] [CrossRef]
- Isola, P.; Zhu, J.Y.; Zhou, T.; Efros, A.A. Image-To-Image Translation with Conditional Adversarial Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1125–1134. [Google Scholar]
- Kong, J.; Ryu, Y.; Jeong, S.; Zhong, Z.; Choi, W.; Kim, J.; Houborg, R. Super resolution of historic Landsat imagery using a dual generative adversarial network (GAN) model with CubeSat constellation imagery for spatially enhanced long-term vegetation monitoring. ISPRS J. Photogramm. Remote Sens. 2023, 200, 1–23. [Google Scholar] [CrossRef]
- Vandal, T.J.; McDuff, D.; Wang, W.; Duffy, K.; Michaelis, A.; Nemani, R.R. Spectral synthesis for geostationary satellite-to-satellite translation. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–11. [Google Scholar] [CrossRef]
- Merkle, N.; Auer, S.; Müller, R.; Reinartz, P. Exploring The Potential of Conditional Adversarial Networks for Optical and SAR Image Matching. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 1811–1820. [Google Scholar] [CrossRef]
- Ao, D.; Dumitru, C.O.; Schwarz, G.; Datcu, M. Dialectical GAN For SAR Image Translation: From Sentinel-1 To Terrasar-X. Remote Sens. 2018, 10, 1597. [Google Scholar] [CrossRef]
- Bermudez, J.D.; Happ, P.N.; Oliveira, D.A.B.; Feitosa, R.Q. SAR To Optical Image Synthesis for Cloud Removal with Generative Adversarial Networks. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 4, 5–11. [Google Scholar] [CrossRef]
- Fuentes Reyes, M.; Auer, S.; Merkle, N.; Henry, C.; Schmitt, M. Sar-To-Optical Image Translation Based on Conditional Generative Adversarial Networks—Optimization, Opportunities and Limits. Remote Sens. 2019, 11, 2067. [Google Scholar] [CrossRef]
- Akiva, P.; Purri, M.; Dana, K.; Tellman, B.; Anderson, T. H2O-Net: Self-Supervised Flood Segmentation via Adversarial Domain Adaptation and Label Refinement. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Virtual, 5 October 2021; pp. 111–122. [Google Scholar]
- Sedona, R.; Paris, C.; Cavallaro, G.; Bruzzone, L.; Riedel, M. A high-performance multispectral adaptation GAN for harmonizing dense time series of landsat-8 and sentinel-2 images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 10134–10146. [Google Scholar] [CrossRef]
- Storey, J.; Roy, D.P.; Masek, J.; Gascon, F.; Dwyer, J.; Choate, M. A Note on The Temporary Misregistration of Landsat-8 Operational Land Imager (OLI) And Sentinel-2 Multi Spectral Instrument (MSI) Imagery. Remote Sens. Environ. 2016, 186, 121–122. [Google Scholar] [CrossRef]
- Jiang, J.; Johansen, K.; Tu, Y.H.; McCabe, M.F. Multi-sensor and multi-platform consistency and interoperability between UAV, Planet CubeSat, Sentinel-2, and Landsat reflectance data. GISci. Remote Sens. 2022, 59, 936–958. [Google Scholar] [CrossRef]
- Ojansivu, V.; Heikkila, J. Image Registration Using Blur-Invariant Phase Correlation. IEEE Signal Process. Lett. 2007, 14, 449–452. [Google Scholar] [CrossRef]
- Zhao, Y.; Celik, T.; Liu, N.; Li, H.C. A Comparative Analysis of GAN-based Methods for SAR-to-optical Image Translation. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Vancouver, BC, Canada, 8–12 October 2015; Springer: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Zhang, H.; Goodfellow, I.; Metaxas, D.; Odena, A. Self-Attention Generative Adversarial Networks. In Proceedings of the International Conference on Machine Learning (PMLR), Long Beach, CA, USA, 9–15 June 2019; pp. 7354–7363. [Google Scholar]
- Mukherjee, R.; Liu, D. Downscaling MODIS Spectral Bands Using Deep Learning. GISci. Remote Sens. 2021, 58, 1300–1315. [Google Scholar] [CrossRef]
- Jason Antic. Deoldify. 2019. Available online: https://Github.Com/Jantic/Deoldify (accessed on 17 January 2021).
- Wald, L. Data Fusion: Definitions and Architectures: Fusion of Images of Different Spatial Resolutions; Presses des MINES: Paris, France, 2002. [Google Scholar]
- Yuhas, R.H.; Goetz, A.F.; Boardman, J.W. Discrimination Among Semi-Arid Landscape Endmembers Using the Spectral Angle Mapper (SAM) Algorithm. In Proceedings of the JPL, Summaries of the Third Annual JPL Airborne Geoscience Workshop. Volume 1: AVIRIS Workshop, Pasadena, CA, USA, 1–5 June 1992. [Google Scholar]
- Zhou, J.; Civco, D.L.; Silander, J.A. A Wavelet Transform Method to Merge Landsat TM and SPOT Panchromatic Data. Int. J. Remote Sens. 1998, 19, 743–757. [Google Scholar] [CrossRef]
- Horé, A.; Ziou, D. Is there a relationship between peak-signal-to-noise ratio and structural similarity index measure? IET Image Process. 2013, 7, 12–24. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C. A Universal Image Quality Index. IEEE Signal Process. Lett. 2002, 9, 81–84. [Google Scholar] [CrossRef]
- Li, Z.; Liu, F.; Yang, W.; Peng, S.; Zhou, J. A survey of convolutional neural networks: Analysis, applications, and prospects. IEEE Trans. Neural Netw. Learn. Syst. 2021, 33, 6999–7019. [Google Scholar] [CrossRef]
- Wang, L.; Chen, W.; Yang, W.; Bi, F.; Yu, F.R. A state-of-the-art review on image synthesis with generative adversarial networks. IEEE Access 2020, 8, 63514–63537. [Google Scholar] [CrossRef]
- Schmitt, M.; Hughes, L.H.; Qiu, C.; Zhu, X.X. SEN12MS—A Curated Dataset of Georeferenced Multi-Spectral Sentinel-1/2 Imagery for Deep Learning and Data Fusion. arXiv 2019, arXiv:1906.07789. [Google Scholar] [CrossRef]
- Arjovsky, M.; Chintala, S.; Bottou, L. Wasserstein generative adversarial networks. In Proceedings of the International Conference on Machine Learning, (PMLR), Sydney, Australia, 6–11 August 2017. [Google Scholar]
- Savage, S.L.; Lawrence, R.L.; Squires, J.R.; Holbrook, J.D.; Olson, L.E.; Braaten, J.D.; Cohen, W.B. Shifts in forest structure in Northwest Montana from 1972 to 2015 using the Landsat archive from multispectral scanner to operational land imager. Forests 2018, 9, 157. [Google Scholar] [CrossRef]
- Vogeler, J.C.; Braaten, J.D.; Slesak, R.A.; Falkowski, M.J. Extracting the full value of the Landsat archive: Inter-sensor harmonization for the mapping of Minnesota forest canopy cover (1973–2015). Remote Sens. Environ. 2018, 209, 363–374. [Google Scholar] [CrossRef]
- Martins, V.S.; Roy, D.P.; Huang, H.; Boschetti, L.; Zhang, H.K.; Yan, L. Deep Learning High Resolution Burned Area Mapping by Transfer Learning from Landsat-8 to PlanetScope. Remote Sens. Environ. 2022, 280, 113203. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pairs | L8 Path/Row | Date | S2 Tile IDs | Date (2019) |
|---|---|---|---|---|
| 1 | 034/030 | 4 October | 13TDH, 13TEH, 13TEJ | 4 October |
| 2 | 031/034 | 15 October | 13SGB, 13SGC | 13 October |
| 3 | 027/037 | 19 October | 14SPB | 22 October |
| 4 | 028/039 | 26 October | 14RMU, 14RMV, 14RNU, 14RNV | 27 October |
| 5 | 034/034 | 5 November | 13SCB | 8 November |
| Landsat 8 | Band | Sentinel-2 | ||
|---|---|---|---|---|
| Spectral Bands | Spatial Resolution (m) | Spatial Resolution (m) | Spectral Bands | |
| Band 3 (533–590 nm) | 30 | Green | 10 | Band 3 (545–575 nm) |
| NA | - | Red Edge 1 | 20 | Band 5 (694–714 nm) |
| NA | - | Red Edge 2 | 20 | Band 6 (731–749 nm) |
| NA | - | Red Edge 3 | 20 | Band 7 (768–796 nm) |
| Band 5 (851–879 nm) | 30 | NIR | 20 | Band 8A (848–881 nm) |
| Quantitative Metric | Description | Range and Preferred Values |
|---|---|---|
| ERGAS | Calculates the normalized average error | Score of 0 denote no difference |
| SAM | Calculates the spectral distortion | Score of 0 denotes no distortion |
| SCC | Measures the difference in the quality of the reconstruction of spatial properties | Range is 0 to 1, where a value close to 1 is ideal |
| PSNR | Measures the difference in the quality of reconstruction | Relative metric, the higher the better |
| RMSE | Calculates the standard deviation of the prediction errors | Value of 0 denotes no difference |
| UQI | Measures the correlation, luminance, and contrast | Range is 0 to 1, where a value close to 1 is ideal |
| ERGAS | SAM | SCC | PSNR | RMSE | UQI | |
|---|---|---|---|---|---|---|
| (A) S2 G | ||||||
| L8 G | 2330.51 | 0.2376 | 0.0632 | 22.86 | 21.05 | 0.9351 |
| CGAN | 1870.25 | 0.2052 | 0.1829 | 24.86 | 17.15 | 0.9526 |
| (B) S2 NIR | ||||||
| L8 NIR | 918.57 | 0.1279 | 0.2588 | 24.39 | 16.40 | 0.9809 |
| CGAN | 848.66 | 0.1227 | 0.3238 | 25.37 | 14.88 | 0.9853 |
| ERGAS | SAM | SCC | PSNR | RMSE | UQI | |
|---|---|---|---|---|---|---|
| (A) S2 RE1 | ||||||
| L8 G | 3597.13 | 0.2211 | 0.0631 | 20.98 | 24.71 | 0.8650 |
| Direct | 1666.10 | 0.1890 | 0.1169 | 23.16 | 19.27 | 0.9458 |
| Multistep | 1547.86 | 0.1718 | 0.1580 | 23.97 | 17.71 | 0.9499 |
| (B) S2 RE2 | ||||||
| L8 NIR | 1868.29 | 0.2275 | 0.1926 | 19.30 | 30.46 | 0.9214 |
| Direct | 1804.38 | 0.2037 | 0.2938 | 20.74 | 25.45 | 0.9381 |
| Multistep | 1851.20 | 0.2126 | 0.2900 | 20.49 | 26.21 | 0.9353 |
| (C) S2 RE3 | ||||||
| L8 NIR | 1439.74 | 0.1841 | 0.1887 | 21.21 | 23.79 | 0.9571 |
| Direct | 1527.85 | 0.1697 | 0.2650 | 22.08 | 21.43 | 0.9573 |
| Multistep | 1518.97 | 0.1762 | 0.2916 | 22.01 | 21.85 | 0.9552 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mukherjee, R.; Liu, D. Spatial and Spectral Translation of Landsat 8 to Sentinel-2 Using Conditional Generative Adversarial Networks. Remote Sens. 2023, 15, 5502. https://doi.org/10.3390/rs15235502
Mukherjee R, Liu D. Spatial and Spectral Translation of Landsat 8 to Sentinel-2 Using Conditional Generative Adversarial Networks. Remote Sensing. 2023; 15(23):5502. https://doi.org/10.3390/rs15235502
Chicago/Turabian StyleMukherjee, Rohit, and Desheng Liu. 2023. "Spatial and Spectral Translation of Landsat 8 to Sentinel-2 Using Conditional Generative Adversarial Networks" Remote Sensing 15, no. 23: 5502. https://doi.org/10.3390/rs15235502
APA StyleMukherjee, R., & Liu, D. (2023). Spatial and Spectral Translation of Landsat 8 to Sentinel-2 Using Conditional Generative Adversarial Networks. Remote Sensing, 15(23), 5502. https://doi.org/10.3390/rs15235502