

GPU-Accelerated Signal Processing for Passive Bistatic Radar


Abstract
:1. Introduction
2. Radar Signal Processing
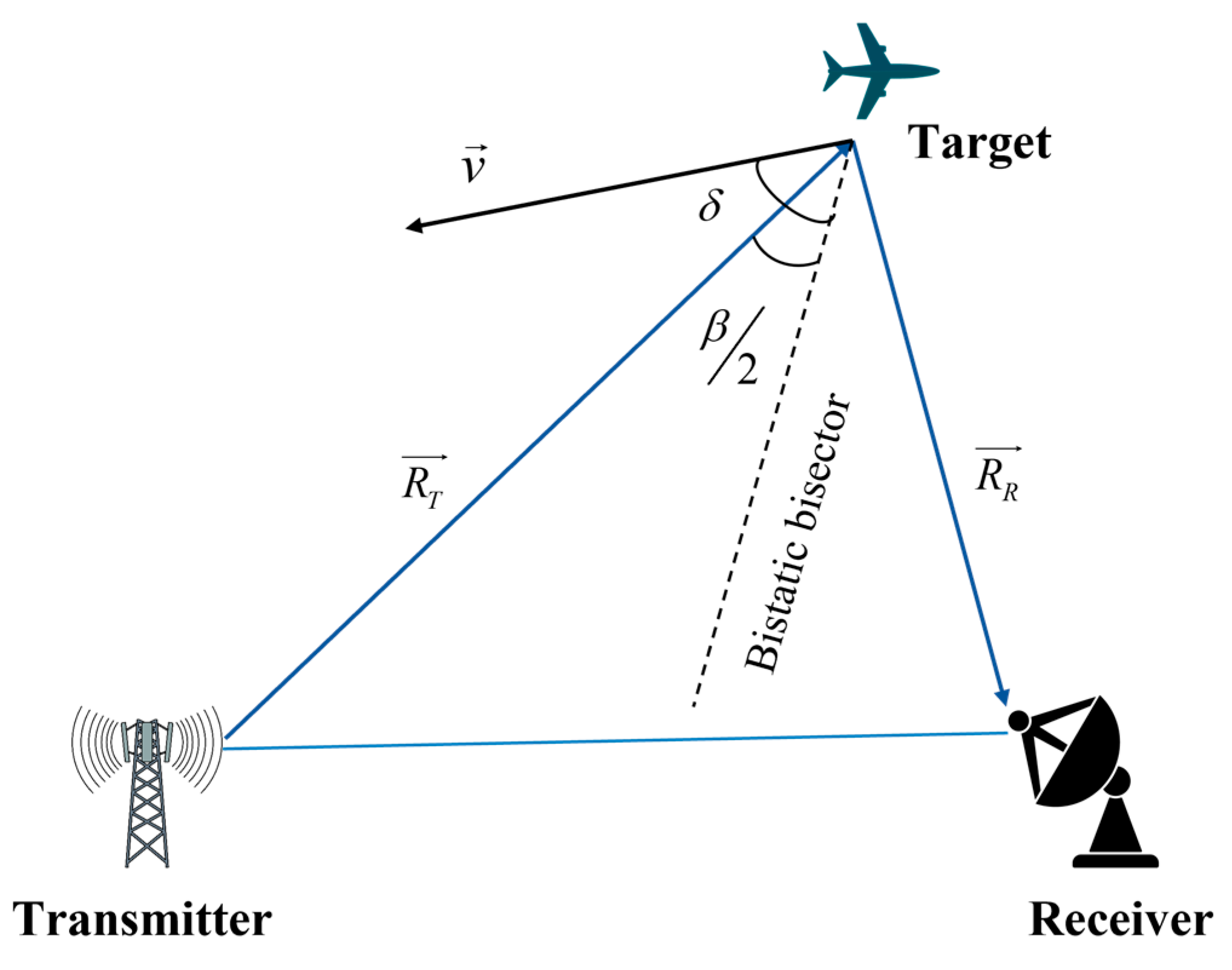
2.1. Radar System Analysis
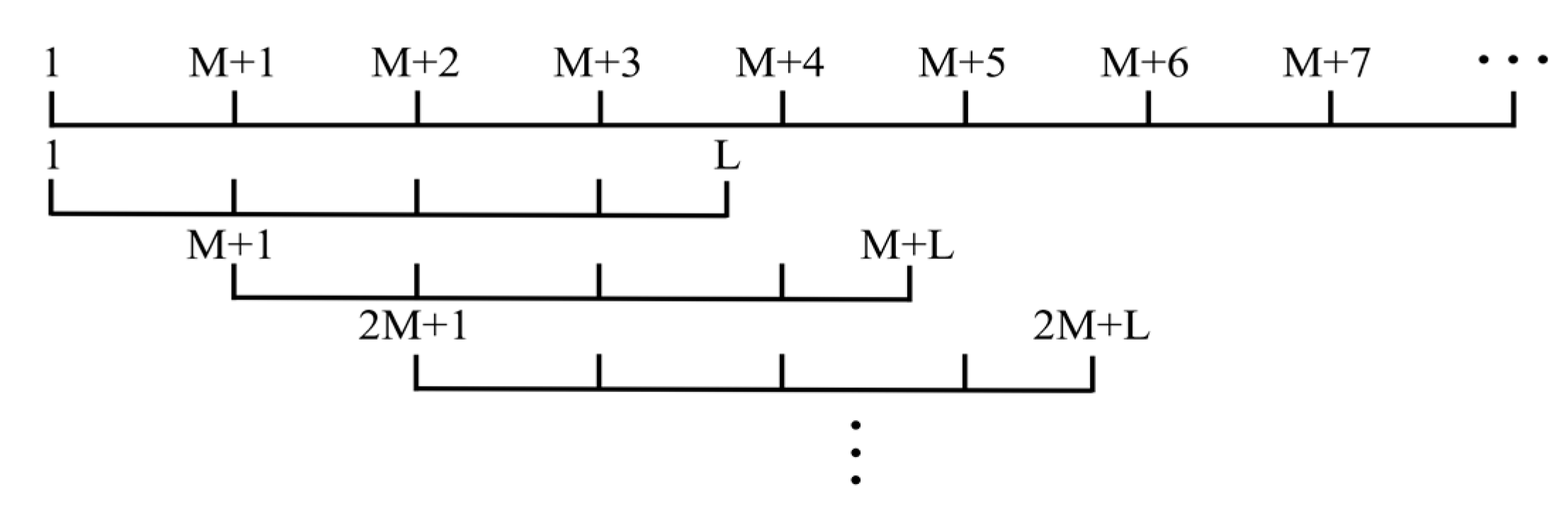
2.2. Clutter Suppression
2.3. Range Doppler Processing
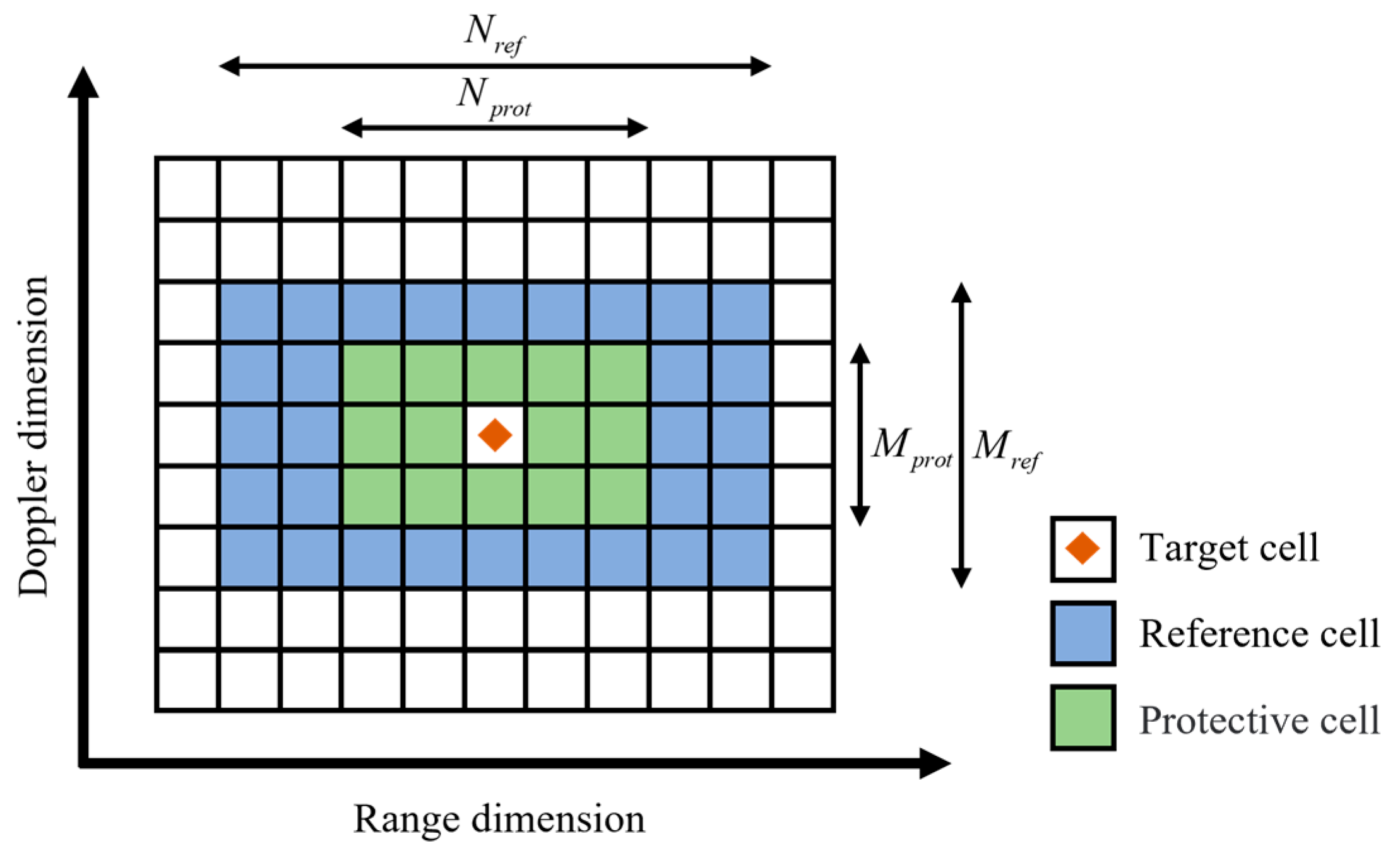
2.4. CFAR Processing
3. GPU Acceleration Realization
3.1. GPU Parallel Algorithm for Clutter Suppression
| Algorithm 1: Kernel Function SigDivision |
| input: Reference signal and segment number i. output: Segmented signal matrix 1 ; 2 ; 3 ; 4 5 ; 6 ; 7 ; 8 ; 9 |
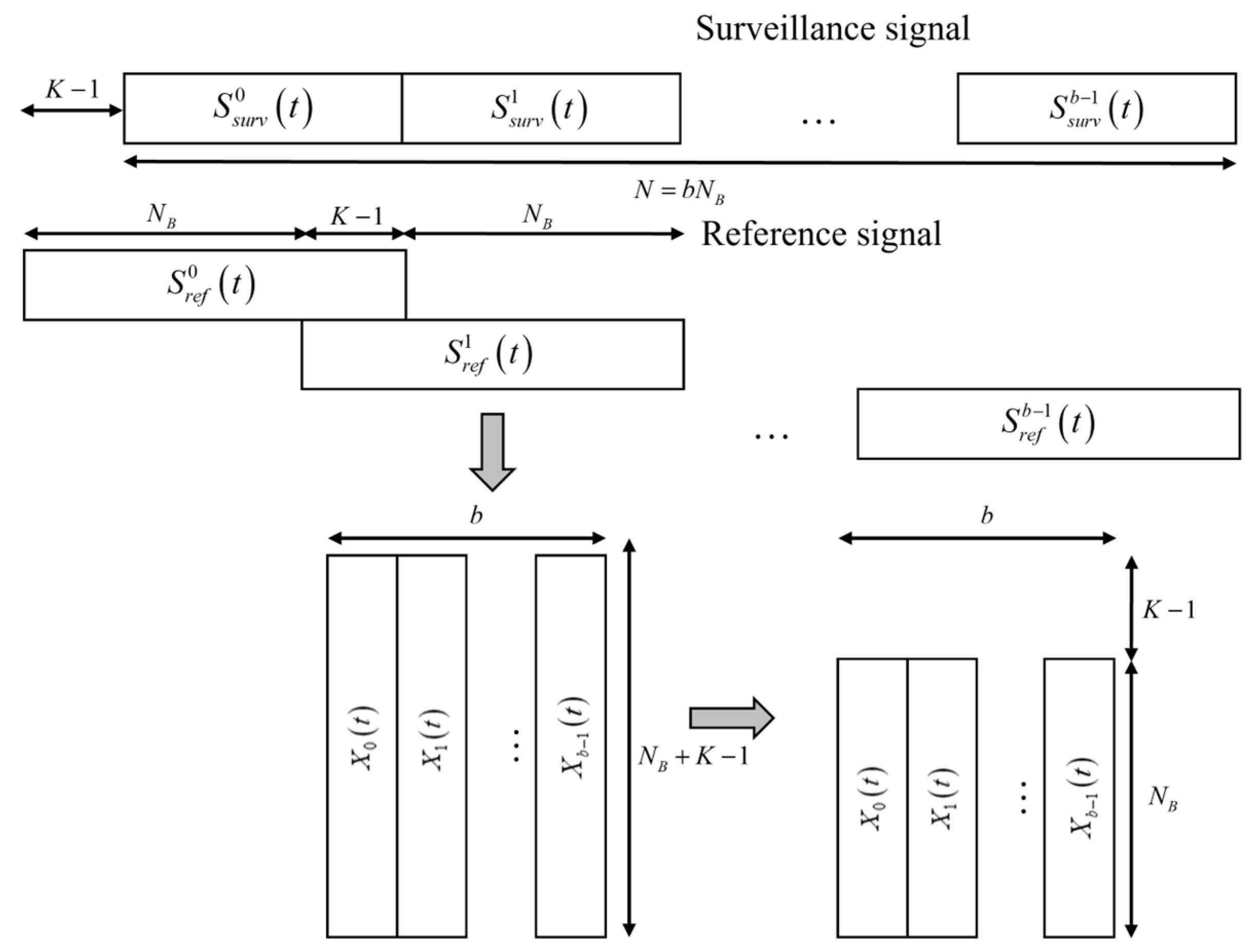
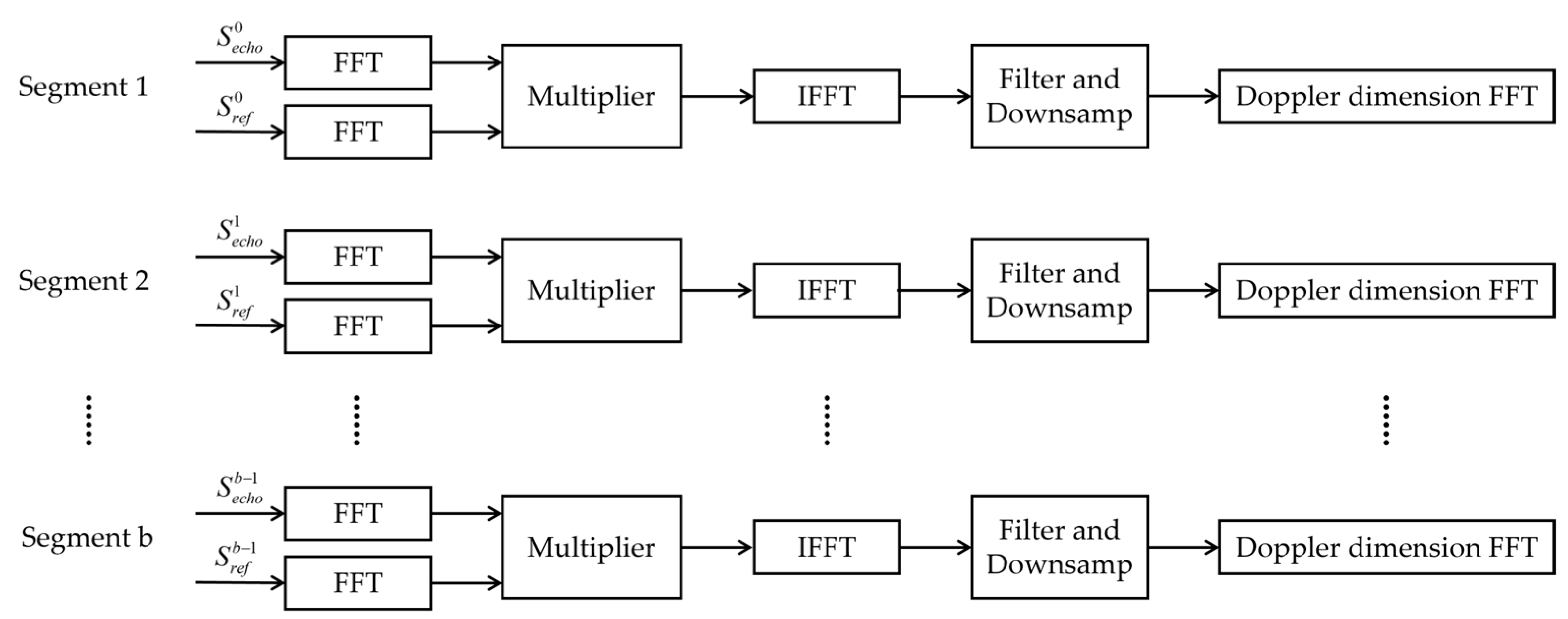
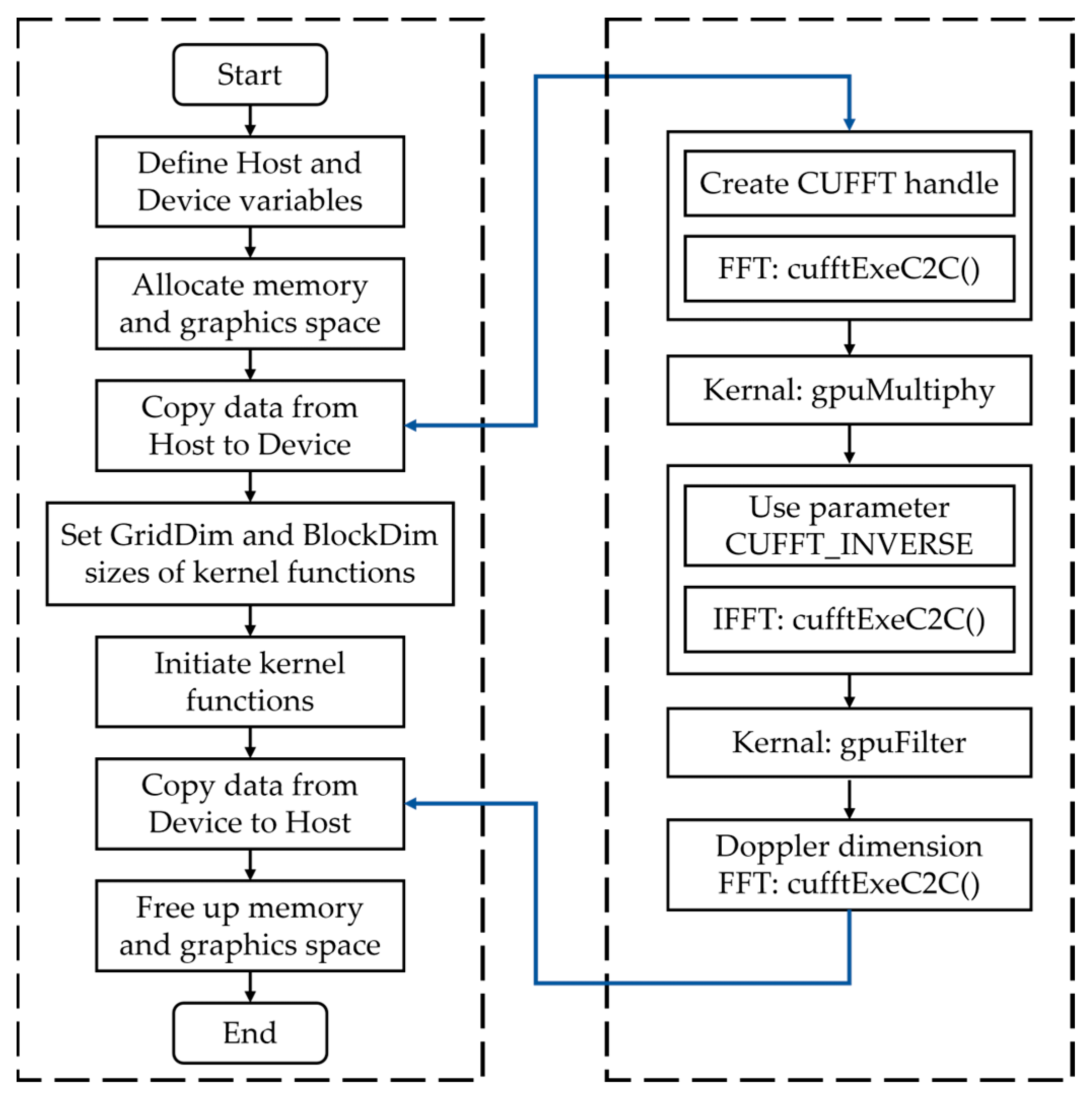
3.2. GPU Parallel Algorithm for Range Doppler Processing
- (1)
- Using the cufftPlan2d function, zero-padding and FFT computations are performed on the clutter-suppressed echo signal, , and the reference signal;
- (2)
- Complex multiplication on the transformed signals using a kernel function is performed. After that, the range–domain correlation operation can be completed by performing IFFT computations;
- (3)
- gpuFilter() is used to achieve downsampling. To avoid aliasing issues stemming from downsampling, it is imperative to apply anti-aliasing filtering concurrently during the downsampling procedure;
- (4)
- FFT is performed on the correlated data along the Doppler dimension.
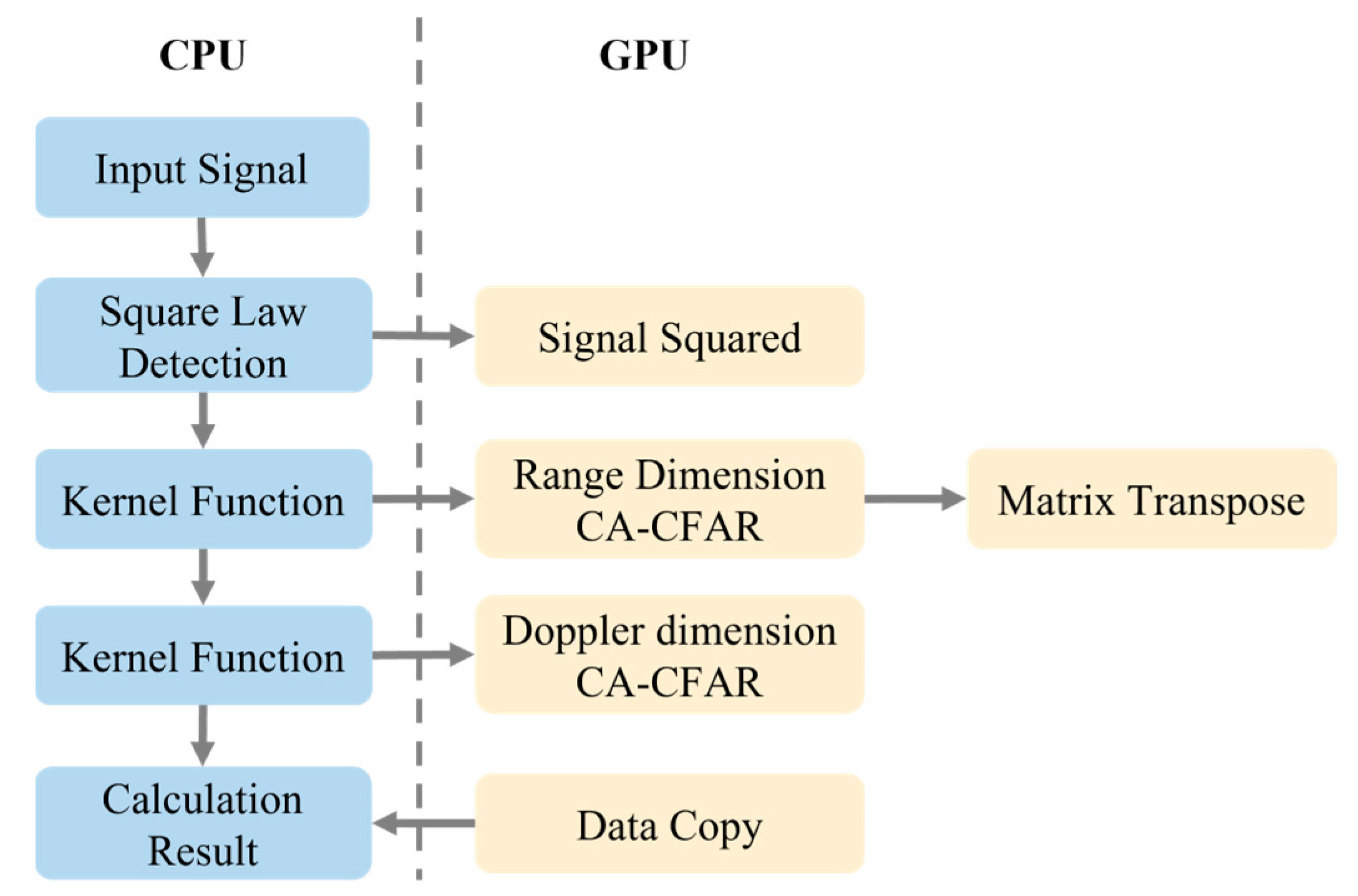
3.3. GPU Parallel Algorithm for CFAR Processing
- (1)
- Malloc() and cudaMalloc() are used to allocate space for CPU variables and GPU variables;
- (2)
- The cudaMemcpy() function is used with the cudaMemcpyHostToDevice parameter to copy CPU variables to GPU;
- (3)
- The thread grid and block sizes are allocated and the square law detection kernel function on the GPU, which can be called from official CUDA libraries, is executed;
- (4)
- Threshold calculation and the decision making kernel function on the detection results are called;
- (5)
- The cudaMemcpy() function is used with the cudaMemcpyDeviceToHost parameter to copy the results from the GPU back to the CPU;
- (6)
- Free() and cudaFree() are called to free the memory resources consumed on the CPU and GPU.
4. Experimental Results
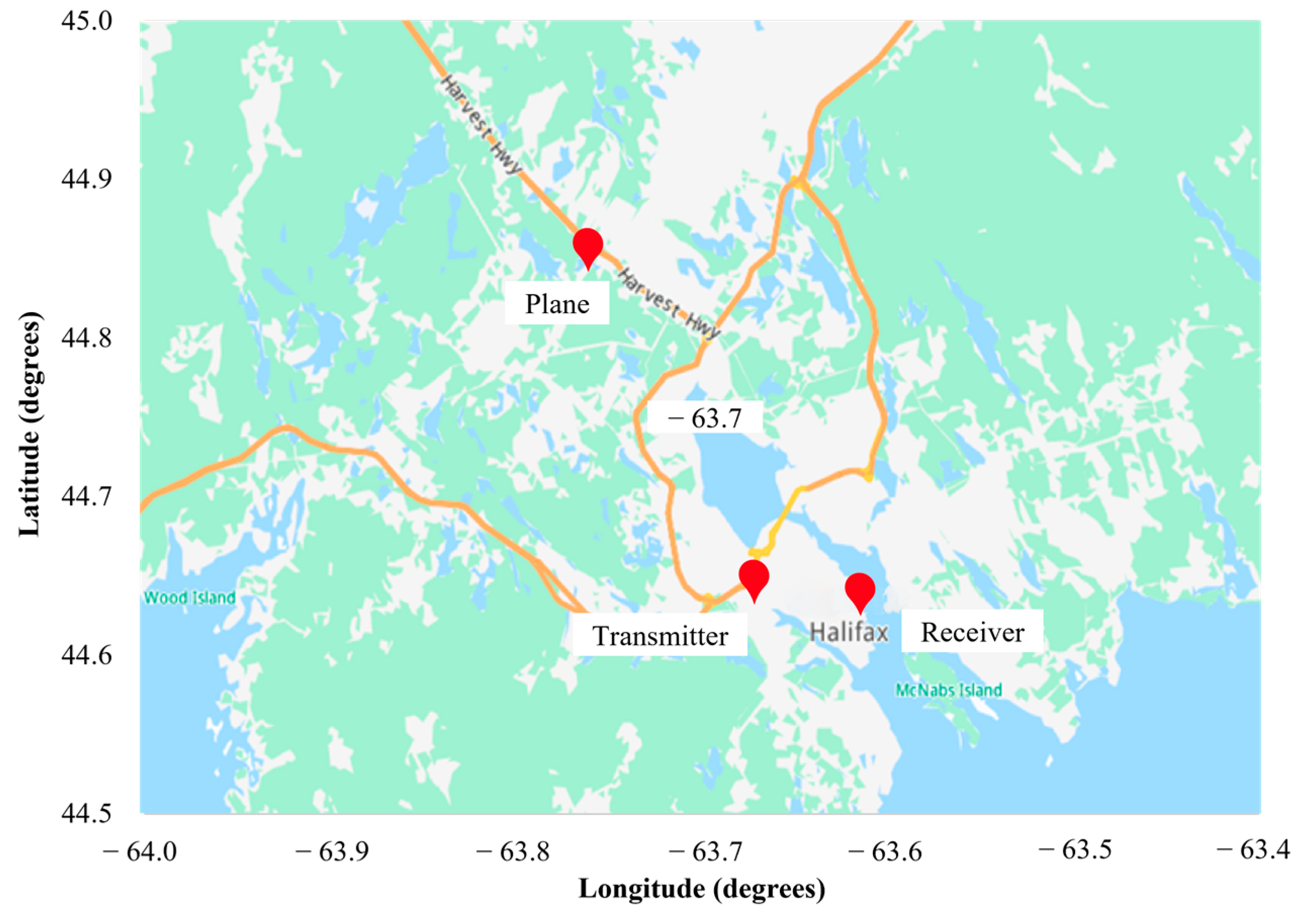
4.1. Experimental Settings
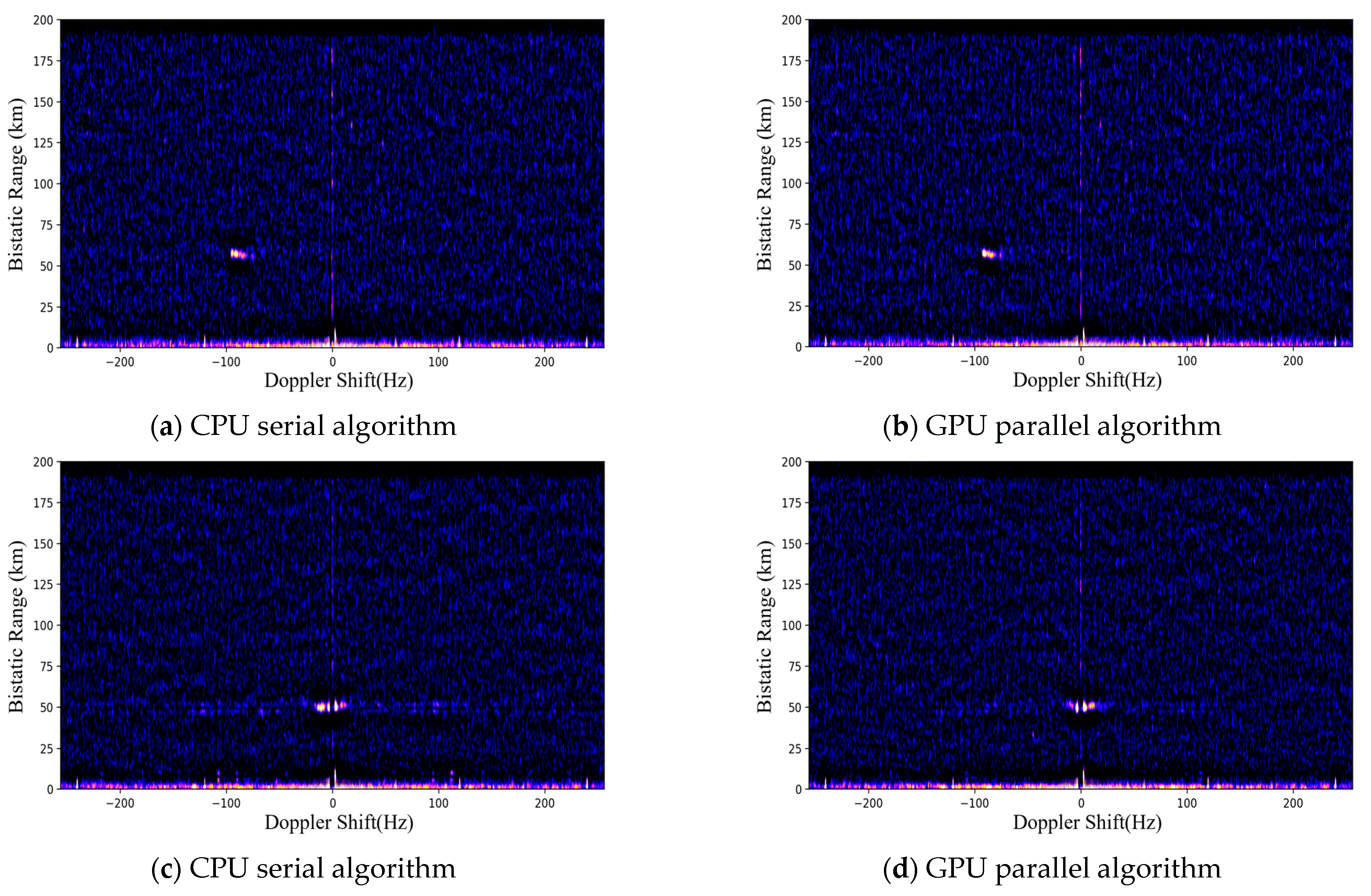
4.2. GPU Parallel Algorithm Correctness Verification
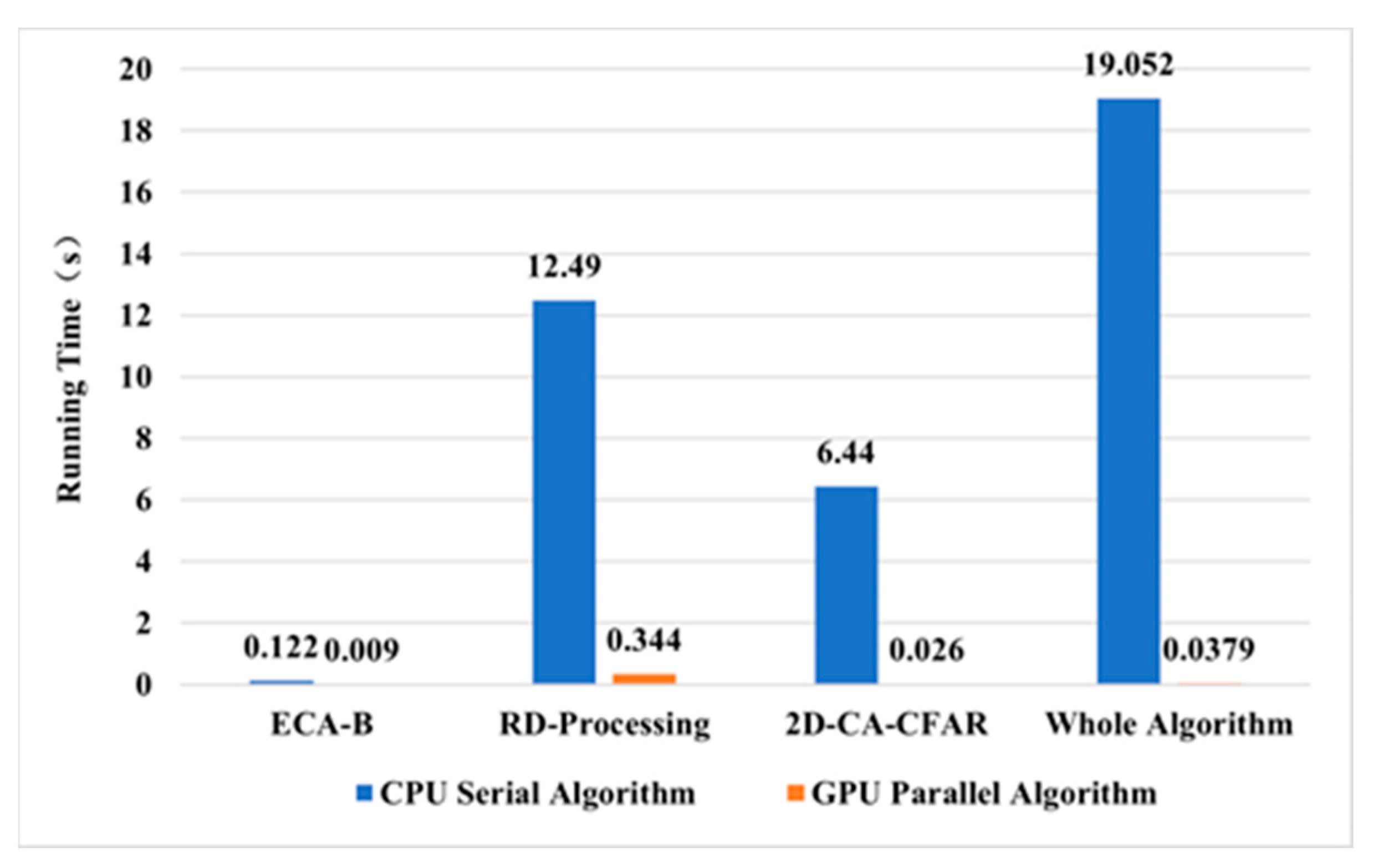
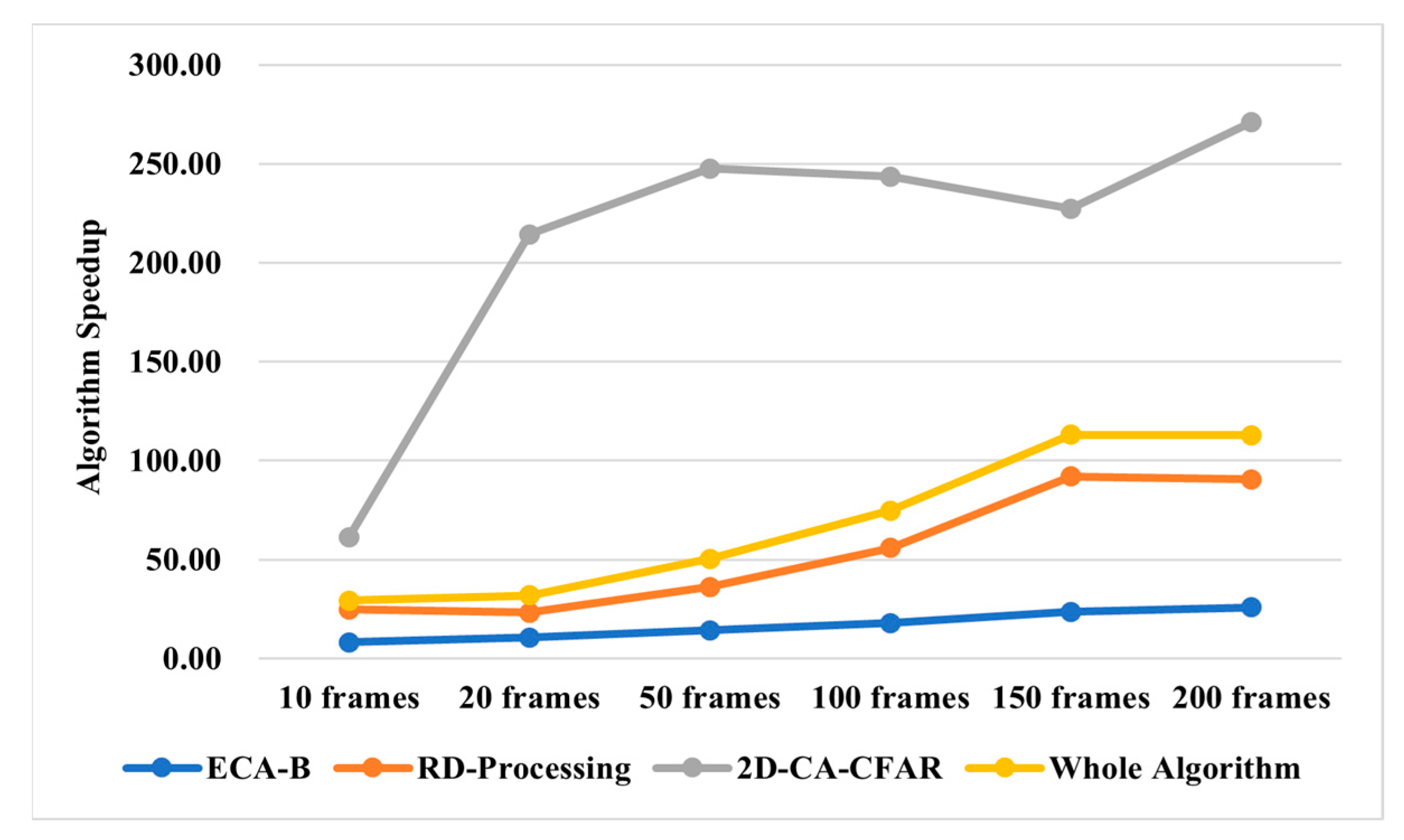
4.3. GPU Parallel Algorithm Acceleration Performance Verification
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, G.S.; Gu, H.; Su, W.M.; Sun, H.B.; Zhang, J.H. Random signal radar-a winner in both the military and civilian operating environments. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 489–498. [Google Scholar]
- Zhang, J.A.; Liu, F.; Masouros, C.; Heath, R.W.; Feng, Z.; Zheng, L.; Petropulu, A. An Overview of Signal Processing Techniques for Joint Communication and Radar Sensing. IEEE J. Sel. Top. Signal Process. 2021, 15, 1295–1315. [Google Scholar] [CrossRef]
- Sun, M.; Pan, J.; Le Bastard, C.; Wang, Y.; Li, J. Advanced signal processing methods for ground-penetrating radar: Applications to civil engineering. IEEE Signal Process. Mag. 2019, 36, 74–84. [Google Scholar] [CrossRef]
- Yan, Q.; Xia, D.; Zhao, Y. Radar Waveform Design Based on Linear Frequency Modulation Signal. In Proceedings of the 2019 IEEE 4th International Conference on Cloud Computing and Big Data Analysis (ICCCBDA), Chengdu, China, 12–15 April 2019; pp. 574–578. [Google Scholar]
- Kuschel, H.; Cristallini, D.; Olsen, K.E. Tutorial: Passive radar tutorial. IEEE Aerosp. Electron. Syst. Mag. 2019, 34, 2–19. [Google Scholar] [CrossRef]
- Griffiths, H.; Baker, C. An Introduction to Passive Radar; Artech House Radar Library, Artech House: Norwood, MA, USA, 2017. [Google Scholar]
- Tan, D.K.P.; Sun, H.; Lu, Y.; Lesturgie, M.; Chan, H.L. Passive radar using global system for mobile communication signal: Theory, implementation and measurements. IEEE Proc.-Radar Sonar Navig. 2005, 3, 116–123. [Google Scholar] [CrossRef]
- Palmer, J.E.; Harms, H.A.; Searle, S.J.; Davis, L. DVB-T passive radar signal processing. IEEE Trans. Signal Process. 2012, 61, 2116–2126. [Google Scholar] [CrossRef]
- Berger, C.R.; Demissie, B.; Heckenbach, J.; Willett, P.; Zhou, S. Signal processing for passive radar using OFDM waveforms. IEEE J. Sel. Top. Signal Process. 2010, 4, 226–238. [Google Scholar] [CrossRef]
- Wan, X.R. An Overview on Development of Passive Radar Based on the LowFrequency Band Digital Broadcasting and TV Signals. J. Radars 2012, 1, 109–123. [Google Scholar]
- Nickolls, J.; Dally, W.J. The GPU computing era. IEEE micro. 2010, 30, 56–69. [Google Scholar] [CrossRef]
- Mittal, S.; Vetter, J. A Survey of CPU-GPU Heterogeneous Computing Techniques. ACM Comput. Surv. 2015, 47, 1–35. [Google Scholar] [CrossRef]
- Bu, Z.; Zhu, H.; Qian, J. GPU-Accelerated Multipath Clutter Cancellation Algorithm for DTMB-Based Passive Radar. In Proceedings of the 2020 International Conference on Information Science, Parallel and Distributed Systems (ISPDS), Xi’an, China, 14–16 August 2020; pp. 216–219. [Google Scholar]
- Zhao, Z.; Wan, X.; Yi, J.; Xie, R.; Wang, Y. Radio frequency interference mitigation in OFDM based passive bistatic radar. AEU-Int. J. Electron. Commun. 2016, 70, 70–76. [Google Scholar] [CrossRef]
- Liu, Y.; Wan, X.; Sun, X. GPU parallel acceleration of target detection in passive radar system. In Proceedings of the 2016 CIE International Conference on Radar (RADAR), Guangzhou, China, 10–13 October 2016; pp. 1–4. [Google Scholar]
- Barkhatov, A.; Kozlov, A. Fast Calculation of Cross-Correlation Function with Video Cards in Coherent Radar. In Proceedings of the 2020 9th Mediterranean Conference on Embedded Computing (MECO), Budva, Montenegro, 8–11 June 2020; pp. 1–5. [Google Scholar]
- Colone, F.; Palmarini, C.; Martelli, T.; Tilli, E. Sliding extensive cancellation algorithm for disturbance removal in passive radar. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 1309–1326. [Google Scholar] [CrossRef]
- Moscardini, C.; Petri, D.; Capria, A.; Conti, M.; Martorella, M.; Berizzi, F. Batches algorithm for passive radar: A theoretical analysis. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 1475–1487. [Google Scholar] [CrossRef]
- Zhang, P.; Wu, Y.; Wang, J. Real-time signal processing for FM-based passive bistatic radar using GPUs. In Proceedings of the 2014 19th International Conference on Digital Signal Processing (DSP), Hong Kong, China, 20–23 August 2014; pp. 536–540. [Google Scholar]
- Malanowski, M. Signal Processing for Passive Bistatic Radar; Artech House: Norwood, MA, USA, 2019. [Google Scholar]
- Mathews, Z.; Quiriconi, L.; Schüpbach, C. Learning Resource Allocation in Active-Passive Radar Sensor Networks. Front. Signal Process. 2022, 2, 822894. [Google Scholar] [CrossRef]
- Wu, Y.; Chen, Z.; Peng, D. Target Detection of Passive Bistatic Radar under the Condition of Impure Reference Signal. Remote Sens. 2023, 15, 3876. [Google Scholar] [CrossRef]
- Ning, X.; Yeh, C.; Zhou, B.; Gao, W.; Yang, J. Multiple-GPU accelerated range-doppler algorithm for synthetic aperture radar imaging. In Proceedings of the Radar Conference (RADAR), Kansas City, MO, USA, 23–27 May 2011; pp. 698–701. [Google Scholar]
- Feng, W.; Friedt, J.M.; Cherniak, G.; Sato, M. Batch compressive sensing for passive radar range-Doppler map generation. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 3090–3102. [Google Scholar] [CrossRef]
- Liu, G.; Yang, W.; Li, P.; Qin, G.; Cai, J.; Wang, Y.; Wang, S.; Yue, N.; Huang, D. MIMO Radar Parallel Simulation System Based on CPU/GPU Architecture. Sensors 2022, 22, 396. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Liu, Y.; Li, Q.; Wei, Z. Radar target MTD 2D-CFAR algorithm based on compressive detection. In Proceedings of the 2021 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 8–11 August 2021; pp. 83–88. [Google Scholar]
- Venter, C.; Grobler, H.; AlMalki, K. Implementation of the CA-CFAR algorithm for pulsed-Doppler radar on a GPU architecture. In Proceedings of the 2011 IEEE Jordan Conference on Applied Electrical Engineering and Computing Technologies (AEECT), Amman, Jordan, 6–8 December 2011; pp. 1–6. [Google Scholar]
- Nishino, R.; Loomis, S.H.C. CuPy: A NumPy-compatible library for NVIDIA GPU calculations. In Proceedings of the Workshop on Machine Learning Systems (LearningSys) in the Thirty-first Annual Conference on Neural Information Processing Systems (NeurIPS), Long Beach, CA, USA, 4–9 December 2017. [Google Scholar]
- Yang, H.; Zhang, T.; He, Y.; Dan, Y.; Yin, J.; Ma, B.; Yang, J. GPU-Oriented Designs of Constant False Alarm Rate Detectors for Fast Target Detection in Radar Images. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5231214. [Google Scholar] [CrossRef]
- Wu, S.; Xu, Z.; Wang, F.; Yang, D.; Guo, G. An improved back-projection algorithm for GNSS-R BSAR imaging based on CPU and GPU platform. Remote Sens. 2021, 13, 2107. [Google Scholar] [CrossRef]
- Malanowski, M.; Kulpa, K.; Kulpa, J.; Samczynski, P.; Misiurewicz, J. Analysis of detection range of FM-based passive radar. IET Radar Sonar Navig. 2014, 8, 153–159. [Google Scholar] [CrossRef]
- Passive Radar_20191102_1011.hdf5. Available online: https://drive.google.com/file/d/18dG__HnbuHJtG6WCHtPq3c_PRLqJA2O/view (accessed on 18 October 2023).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device Type | Model | Key Parameters |
|---|---|---|
| CPU | Intel i9-10980XE | Base clock: 3.0 GHz Boost clock: 4.6 GHz |
| Cores: 18 Threads: 36 | ||
| L3 cache: 24.75 MB | ||
| GPU | NVIDIA RTX3090 | CUDA cores: 10496 |
| GPU frequency: 19.5 GHz | ||
| GPU memory: 24 GB(GDDR6) | ||
| GPU computing power: 8.6 |
| Parameters | Value |
|---|---|
| Signal type | FM radio broadcast |
| Center frequency | 101.9 MHz |
| Band width | 200 kHz |
| Sampling rate | 2.4 MHz |
| Maximum bistatic range | 200.11 km |
| Range resolution | 1.14 Km |
| Maximum Doppler frequency shift | 256.04 Hz |
| Doppler resolution | 0.5 Hz |
| Signal Processing | CPU (s) | GPU (s) | Speedup |
|---|---|---|---|
| ECA-B | 0.122 | 0.009 | 14.37 |
| RD-Processing | 12.490 | 0.344 | 36.31 |
| 2D-CA-CFAR | 6.440 | 0.026 | 247.69 |
| Whole Algorithm | 19.052 | 0.379 | 50.34 |
| Data Volume | ECA-B | RD-Processing | 2D-CA-CFAR | Whole Algorithm |
|---|---|---|---|---|
| 10 frames (80 MB) | 8.21 | 24.77 | 61.24 | 29.29 |
| 20 frames (160 MB) | 10.52 | 23.28 | 214.25 | 31.99 |
| 50 frames (400 MB) | 14.37 | 36.31 | 247.69 | 50.34 |
| 100 frames (800 MB) | 17.87 | 55.91 | 243.49 | 74.72 |
| 150 frames (1200 MB) | 23.61 | 92.11 | 227.39 | 113.13 |
| 200 frames (1600 MB) | 25.95 | 90.54 | 271.02 | 112.95 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, X.; Liu, P.; Wang, B.; Jin, Y. GPU-Accelerated Signal Processing for Passive Bistatic Radar. Remote Sens. 2023, 15, 5421. https://doi.org/10.3390/rs15225421
Zhao X, Liu P, Wang B, Jin Y. GPU-Accelerated Signal Processing for Passive Bistatic Radar. Remote Sensing. 2023; 15(22):5421. https://doi.org/10.3390/rs15225421
Chicago/Turabian StyleZhao, Xinyu, Peng Liu, Bingnan Wang, and Yaqiu Jin. 2023. "GPU-Accelerated Signal Processing for Passive Bistatic Radar" Remote Sensing 15, no. 22: 5421. https://doi.org/10.3390/rs15225421
APA StyleZhao, X., Liu, P., Wang, B., & Jin, Y. (2023). GPU-Accelerated Signal Processing for Passive Bistatic Radar. Remote Sensing, 15(22), 5421. https://doi.org/10.3390/rs15225421