1. Introduction
The Yellow River is a prototypical sediment-bearing river on a global scale, characterized by a paucity of water relative to sediment. Its distribution of water and sediment exhibits a pronounced imbalance. In the middle reaches, the Loess Plateau grapples with severe soil erosion, leading to a substantial inflow of sediment into the primary channel of the Yellow River via its tributaries [
1]. As a consequence, there is a discernible escalation in sediment content in both the middle and lower reaches of the main stem. This phenomenon not only complicates the effective utilization of water resources in the middle reaches but also causes an elevation of the riverbed in the lower reaches, culminating in the formation of a ‘secondary overhanging river’ [
2]. Such a situation poses a substantial threat to both lives and property. Consequently, the issue of sediment management in the Yellow River has emerged as a pivotal and highly relevant research focus.
Traditional river sediment monitoring predominantly relies on station observations and field sampling and measurements. In the middle reaches of the Yellow River, there are more than 500 hydrological stations at various levels capable of providing accurate sediment content data at a daily scale. Nonetheless, these hydrological stations demand high operational and maintenance costs. Furthermore, taking field measurements is a time-consuming and labor-intensive process, and the data acquired from these stations are limited to specific points, failing to precisely represent the spatial dynamics of river sediment.
After decades of long-term management of the Yellow River, sediment transport in the main stream has significantly decreased. This reduction in sediment transport has transitioned into a new phase of precision management, necessitating ongoing spatial monitoring of the primary sediment tributaries to accurately pinpoint sediment sources. Suspended Particulate Matter (SPM) concentration, denoted as
CSPM, serves as a key indicator of suspended sediment content, concluding clay and silt particles with a diameter of less than 2 mm [
3]. SPM induces noticeable alterations in optical signals at specific wavelengths on the water surface, rendering satellite remote sensing a successful method for monitoring
CSPM dynamics in various open water bodies, such as oceans, lakes, and reservoirs [
4,
5].
Nevertheless, the Yellow River tributaries exhibit distinct characteristics; they tend to be narrower and longer than the main channel, typically spanning only tens of meters in width. Satellite sensors, constrained by their spatial resolution, often encounter challenges in accurately capturing data in these tributaries. This limitation results in mixed pixels at the boundary between land and water bodies, and the interference caused by adjacent pixel effects becomes conspicuous. Furthermore, short-term heavy rainfall stands as one of the primary contributors to sediment production in the middle reaches of the Yellow River [
6]. However, satellites frequently face difficulties in acquiring effective data due to the influence of adverse weather conditions. The rapid advancements in UAV remote sensing technology present a promising solution to these issues. UAVs offer distinct advantages, including high spatial resolution, reduced susceptibility to weather and atmospheric interference, and the flexibility to acquire remote sensing images as needed. Consequently, UAV-based remote sensing holds considerable potential for effectively monitoring
CSPM in the primary sediment-bearing tributaries of the Yellow River [
7,
8].
Given the substantial impact of
CSPM on the spectral signals of water bodies, researchers both domestically and internationally have proposed several well-established inversion methods, encompassing empirical, semi-empirical, and semi-analytical models as summarized in
Table 1. Empirical and semi-empirical models operate by deriving
CSPM concentrations through the selection of optimal spectral bands or band combinations using specific mathematical techniques. These models establish empirical–statistical relationships directly between remotely sensed data and measured
CSPM values [
9]. Previous research has demonstrated that single-band models can yield satisfactory results when characteristic bands of the spectral curve are distinct [
10,
11]. Alternatively, some researchers have employed the band ratio method to select the input parameter that exhibits the highest correlation with
CSPM among all possible band combinations [
12]. Semi-analytical methods, on the other hand, are rooted in modeling the varying absorption and scattering characteristics of water bodies. For instance, Jiang [
13] categorized water bodies into four types—clear, moderately turbid, highly turbid, and extremely turbid—by comparing remote sensing reflectance (
Rrs) at wavelengths 490, 560, 620, and 754 nm. Leveraging the distinct relationships between
CSPM and backward scattering coefficients (
bbp) in each type, a semi-analytical approach was employed to formulate unique inversion models for each water body category. However, it is noteworthy that the
CSPM concentrations in the existing models generally span from tens to thousands of mg/L. In contrast, the Yellow River and its major sediment-bearing tributaries can experience concentrations in the tens of thousands of mg/L in a short timeframe following heavy rainfall events. Consequently, there exists uncertainty regarding the applicability of current inversion models to the exceptionally turbid river conditions encountered in this study.
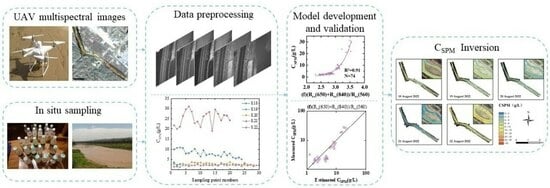
Therefore, the Wuding River, recognized as one of the principal sediment-laden tributaries of the Yellow River, was chosen as the study area. An experiment was conducted both before and after a summer rainfall event using multispectral UAV remote sensing technology in conjunction with in situ sampling, enabling CSPM inversion in this context. This study aims to address the following inquiries: What is the suitability and accuracy of existing CSPM inversion models when applied to the Wuding River, characterized by its extreme turbidity? How to develop a new high-precision inversion model if existing models have proved unsuitable? And, what are the spatial and temporal patterns of CSPM in the Wuding River before and after the occurrence of a heavy rainfall?
By addressing the aforementioned questions, we offer valuable technical and methodological insights into UAV remote sensing monitoring of CSPM in such challenging water bodies. These findings are expected to provide critical support for achieving precise sediment management in the Yellow River and contributing to the objective of high-quality development within the Yellow River Basin.
5. Conclusions
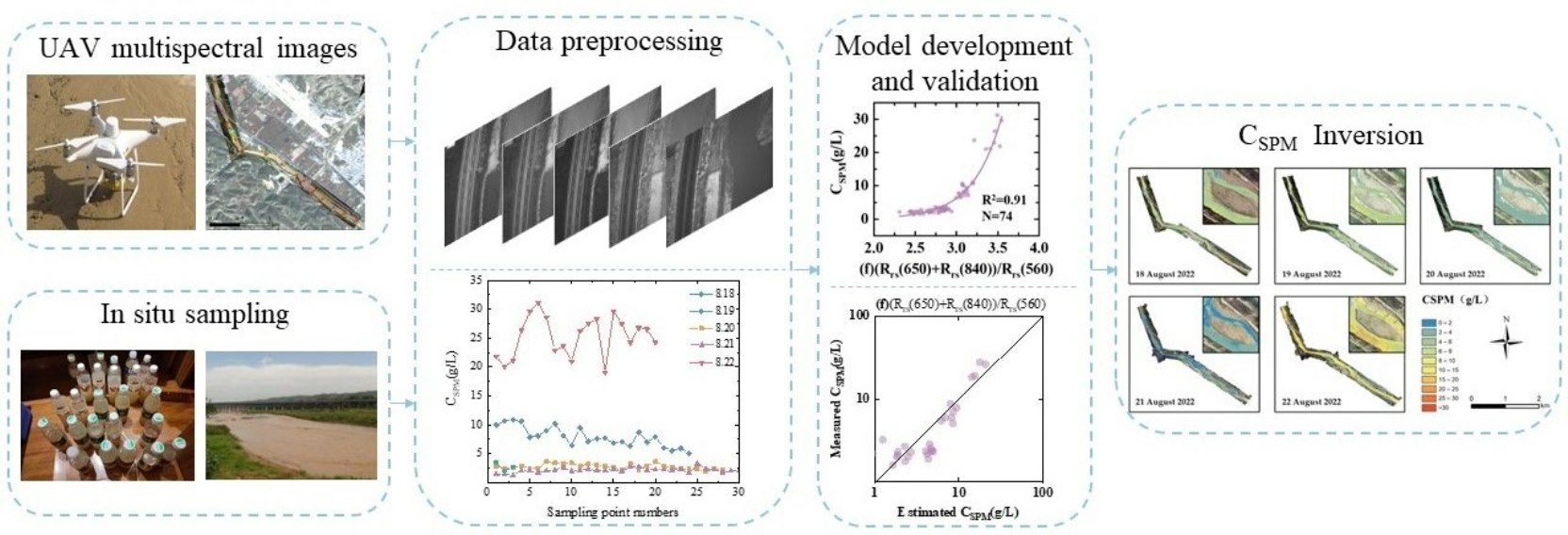
In this study, we conducted a CSPM inversion study in the extremely turbid Wuding River using UAV multispectral remote sensing technology. The results showed that the accuracy of the existing empirical or semi-analytical models was low due to the fact that the CSPM was out of the applicable range, particularly in the case of extremely high concentration (CSPM > 20 g/L). The newly developed model TB2-EXP significantly improved the accuracy of CSPM estimating (overall R2 of 0.83, RMSE of 3.73 g/L, MAPE of 44.95%). And, the performance of the model was especially good under the condition of extreme turbidity (CSPM > 20 g/L) (R2 of 0.65, RMSE of 6.20 g/L, MAPE of 12.37%). From the spatial inversion results, the changes of CSPM in the study area were obvious within five days, especially between 21 and 22 August, where the average CSPM increased significantly from 1.86 g/L to 10.73 g/L within ten hours after the heavy rainfall in the evening of the 21st day. This demonstrates the effectiveness of UAVs in monitoring significant CSPM changes over short durations, even under poor weather conditions. This study validated that the new proposed CSPM inversion model is well suited for remote sensing monitoring of extremely turbid rivers, such as the main tributaries of the Yellow River, which demonstrated the potential of multispectral UAVs in CSPM monitoring of narrow rivers. In the future, the sampling point data can continue to be supplemented to increase the robustness and applicability of the CSPM inversion model.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










