Indeed, at a flight speed of up to 35 km/h and a sampling rate of 50 readings per second, the density of observation points obtained using the UAV-TEM significantly exceeded that collected by standard helicopter survey at a flight speed of 120–150 km/h, and even more. The actual density of UAV-TEM observation points in practice reached point/10–point/25 m, which automatically created an advantage for solving inverse problems for areas with complex geological structures.
To quickly solve the inverse problem based on the obtained data and create a 3D model of electrical resistivity and geophysical sections, we applied a processing technique, first described in detail below.
3.1. UAV-TEM Data Processing: Modification of the Method of Calculation of Apparent Longitudinal Conductance S-tau
In the transition from ground-based soundings to airborne electromagnetic surveys, the issue of developing algorithms and calculating programs or software that provide efficient and fast interpretation of a huge amount of data, the amount of which can reach hundreds or even thousands of points per day, is of prime importance. We considered returning to the old and now largely forgotten method of differentially transforming EMF readings into curves of apparent longitudinal conductance as functions of time
S(
t) or depth
S(
H) and named the method
S-tau (or
Sτ). This method was proposed by Sidorov and Tikshaev at the end of the 1960s [
11]. It became widespread in the 1970s and 1980s, but it is no longer used. The method’s main flaw was the unconditional identification of each local increase in longitudinal conductance
S on the curve to the conductive layer and the non-increase part
S(
H) to the high-resistive rocks. Unfortunately, the authors and many users did not have enough knowledge about the theory of electromagnetic sounding, and the most enthusiastic, neglecting the laws of diffusion of EM fields in media, even tried to delineate more than ten layers of different resistivity at each TEM point. Alas, time, experience, and numerous boreholes have proved the inefficiency of the method when used for “high-resolution TEM”. Software for calculating multi-layer theoretical TEM curves that arrived in time pointed out to geophysicists the impossibility of the occurrence of local fluctuations on
Sτ, which is a consequence of the diffusion processes of the propagation of EM fields in a real medium. In addition, induced polarization effects distorting the TEM readings have been discovered in many regions of the USSR and Canada, and their study has begun. Zadorozhnaya [
12] showed that even a simple model composed of three conductive
S-planes often cannot be unambiguously identified. Ageev [
13] proposed that the fluctuations of the
Sτ curves are mostly due to induced polarization processes occurring in rocks. Moreover, the numerical differentiation of the EMF readings itself can lead to fluctuations in the
Sτ curves, which geophysicists identified as the presence of thin conductive layers in the section. Now, in the age of total computerization, most researchers use commercial software for the interpretation of TEM data based on solving direct problems of the distribution of the EM field in 1D or 2D models, and the
Sτ-method has taken a back seat. However, even if we plan to perform 1D, 2D, or 3D inversions, it is necessary to speed up data processing—a quick qualitative assessment of the general structures in the investigated area is made. Then, an initial ‘starter’ model for inversion is chosen since, in this case, the inversion routine time can be reduced considerably. Thus, using the
S-tau transformation, the authors managed to obtain very good results, for example, when interpreting airborne TEM data [
7].
Having discarded the idea of ”high-resolution TEM”, the use of the method allows determining the conductance increasing with depth and determining the depth where Sτ increases noticeably. The presence of low-resistive objects (bodies and/or layers) in the section is associated with these parts of the curve S.
Consider the properties of conducting
S-planes. Thin planes are also called Price’s sheets, Scheinman’s shits or
S-planes. S.M. Scheinman (1947) [
14] was the first to discuss the problem of transient processes induced by electrical and magnetic dipoles placed on a thin conductive layer. Scheinman formed special boundary conditions, which were obtained by limiting the transition from a thin layer to the
S-plane as follows:
where
h and
σ are the thickness and conductivity of the layer, respectively. Sheinman’s solutions in the frequency domain are presented in the time domain using the integral Fourier transformation. Smythe V.R. (1950) [
15] described the original solution derived from the method of imagining sources. He showed that the transient of an EM field can be presented as a so-called “floating plane” with longitudinal conductance
S, i.e., the
S-plane is moved (“floating”) from the source at a velocity of 1/
μ S, where μ is magnetic permeability (
μ = 4π10
−7 H/m).
For the horizontal S-plane, the vector potential has only one component, A
x, and for an electrical line (dipole) AB, it is equal to:
where
I is an electrical current (in amperes) and is a projection of the line connecting the point of observation to the coordinate plane. The Equation (2) completely coincides with the equation obtained by Sheinman (1947).
The equation for the vertical component of the magnetic field
Bz can be presented as follows:
For a horizontal
S-plane, the vector-potential has only one component
Ax, so Equation (3) is simplified:
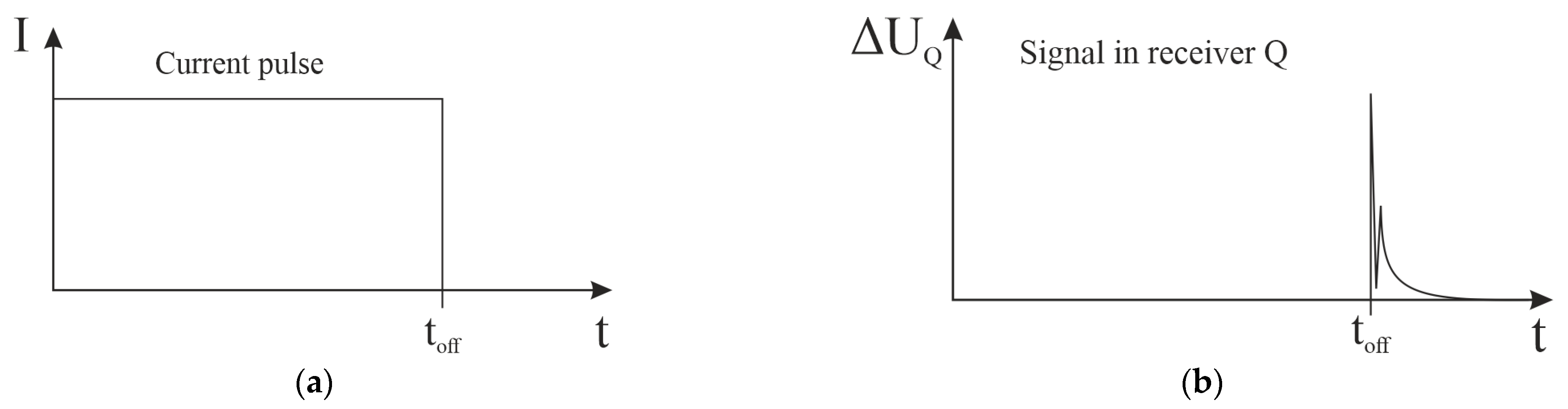
EMF in the receiving loop is calculated using Faraday law:
According to [
15], regardless of the position of the observation point at each moment in time, the amplitude of the potential vector
Ax and, accordingly,
Bz and EMF (
e(
t)) will be equal to the amplitude of a certain “floating” conductive plane lying at a depth
h(
t) with conductance
S(
t), equivalent to the total longitudinal conductance of the entire section up to depth
H =
h(
t) (
Figure 5).
An increase in color tone indicates an increase in the conductance of the section with depth. When using in Equations (4) and (5), we obtain the formula EMF for “floating plane”:
where:
For airborne TEM, using a ground-based power source (a large loop or an electrical line) and a receiver loop suspended from the drone at the height
z0:
Clearly, for the purposes of field data interpretation, the longitudinal conductance of the section at each point in time can be represented as the conductivity of a floating plane
Sτ(
H) located at a specific depth
h(
t):
However, for theoretical and field EM curves, it is impossible to determine the parameters of the “floating” plane using Equation (7) since that equation contains two unknown parameters,
Sτ(
H) and
h(
t), or more precisely,
Sτ(
t) and
m(
t). Thus, it is necessary to introduce a new function
ϕ(
m) that does not depend on
S, namely:
The Equation (8) depends only on a certain parameter
m, which is easily calculated for each time by comparing the calculated
with the given function
for the specified array. Now, substituting
m(
t) into Equation (7), we can calculate the longitudinal conductance of the section at a given point [
11]:
Note that the method
Sτ can only be used in the near zone of the source, that is,
Kr ≪ 1, when (
K is the wave number). Consider different types of theoretical curves
Sτ(
H). Let us first analyze the theoretical curves for two-layered models with the following parameters (
Table 4). The theoretical EMF curves are calculated as follows. Given layered models with specified parameters of electrical resistivity
ρi and thickness
hi for each layer are used, then each layer is compressed into a thin plane
Si [Equation (1)], and EMF are calculated in a model consisting of a set of
S-planes.
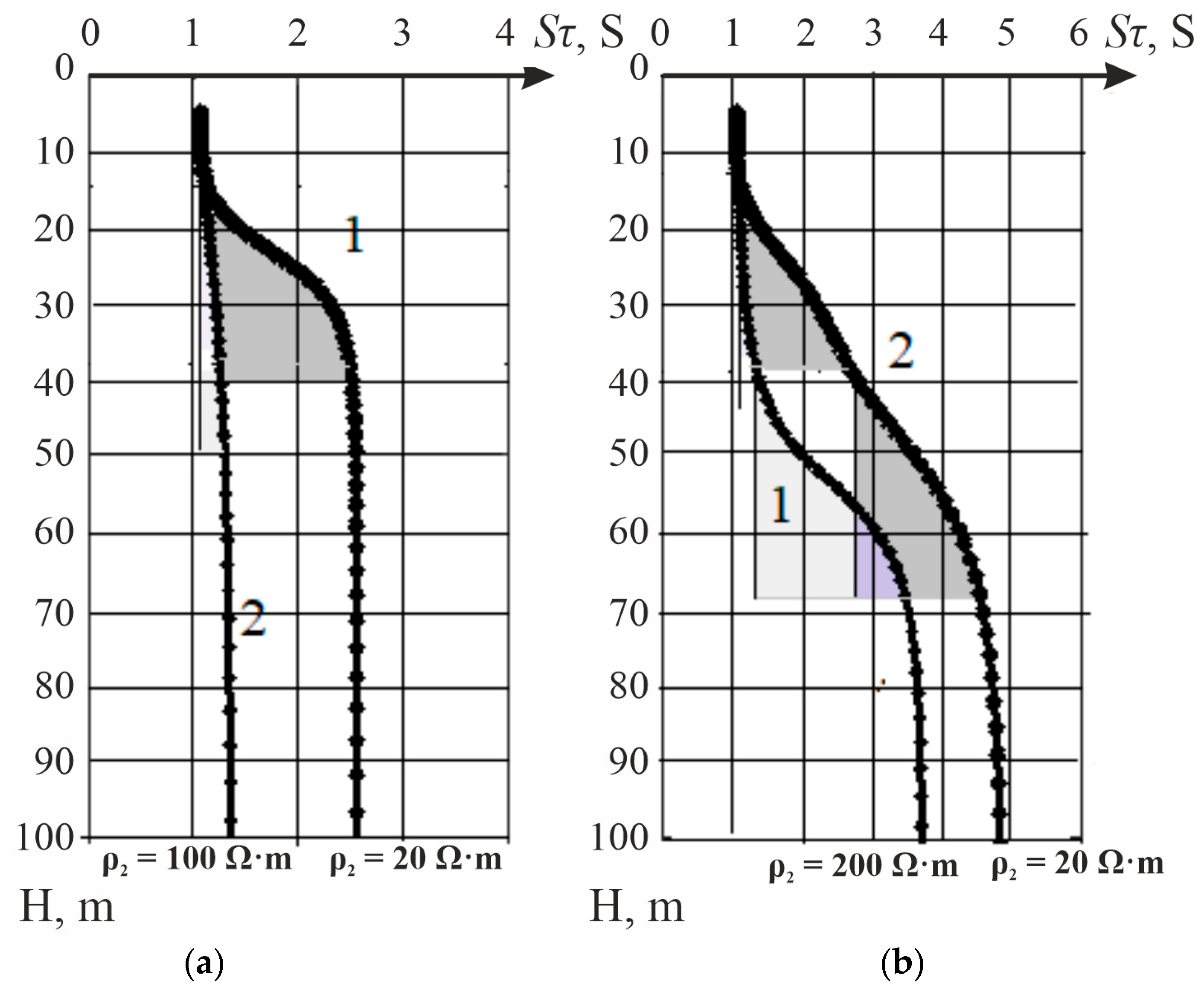
Figure 6a shows the curves
Sτ(
H) for two models where the intermediate layers have a resistivity of 20 and 100 Ω·m. In the case when the layer is more conductive, the longitudinal conductance increases sharply in the depth interval of 11 m to 38 m, which corresponds to the occurrence of this layer (curve 1). In the second case, the increase in conductivity from 1 S to 1.31 S occurs slowly (curve 2). However, even in this type of model, the presence of a layer with a resistivity of 100 Ω·m can be detected. The basement of the model (high restive halfspace) has no effect on the shape of the curves
Sτ(
H).
The geoelectrical parameters of two three-layer models are presented in
Table 5.
Figure 6b shows the curves
Sτ(
H) for these models.
In the first model, two conductive layers are separated by a rather thick layer (31 m) of high resistivity (200 Ω·m. In this case, the increase in longitudinal conductance due to the presence of the third conductive layer (15 Ω·m) shows up very clearly on the curves Sτ(H) at a depth of about 40 m (curve 1). If all three layers have low resistivity comparable in magnitude, then it is not possible to divide the curve Sτ(H) into parts corresponding to each layer (curve 2). Instead, we can see that the conductance of the model increases monotonically, and we are dealing with a highly conductive section or body in a certain depth interval. The blue lines show the surface of conductive layers (S-planes).
What is critical is that unless the EMF readings are distorted by induced polarization or/and superparamagnetic effects, the asymptotic branch of the curves Sτ always corresponds to the total conductance of the geological section.
As we can see, the method Sτ has some advantages. If there are conductive bodies and/or layers in the section, the use of this method makes it possible to trace the increase in longitudinal conductance Sτ(H) or Sτ(t) and to define the total conductance of the section SΣ at each TEM point. Furthermore, the calculation procedure is free of the principle of equivalence, which refers to the phenomenon in which one TEM curve can correspond to many geoelectric sections with radically different parameters (depths, number of layers, and resistivity).
3.2. Interpretation of Data
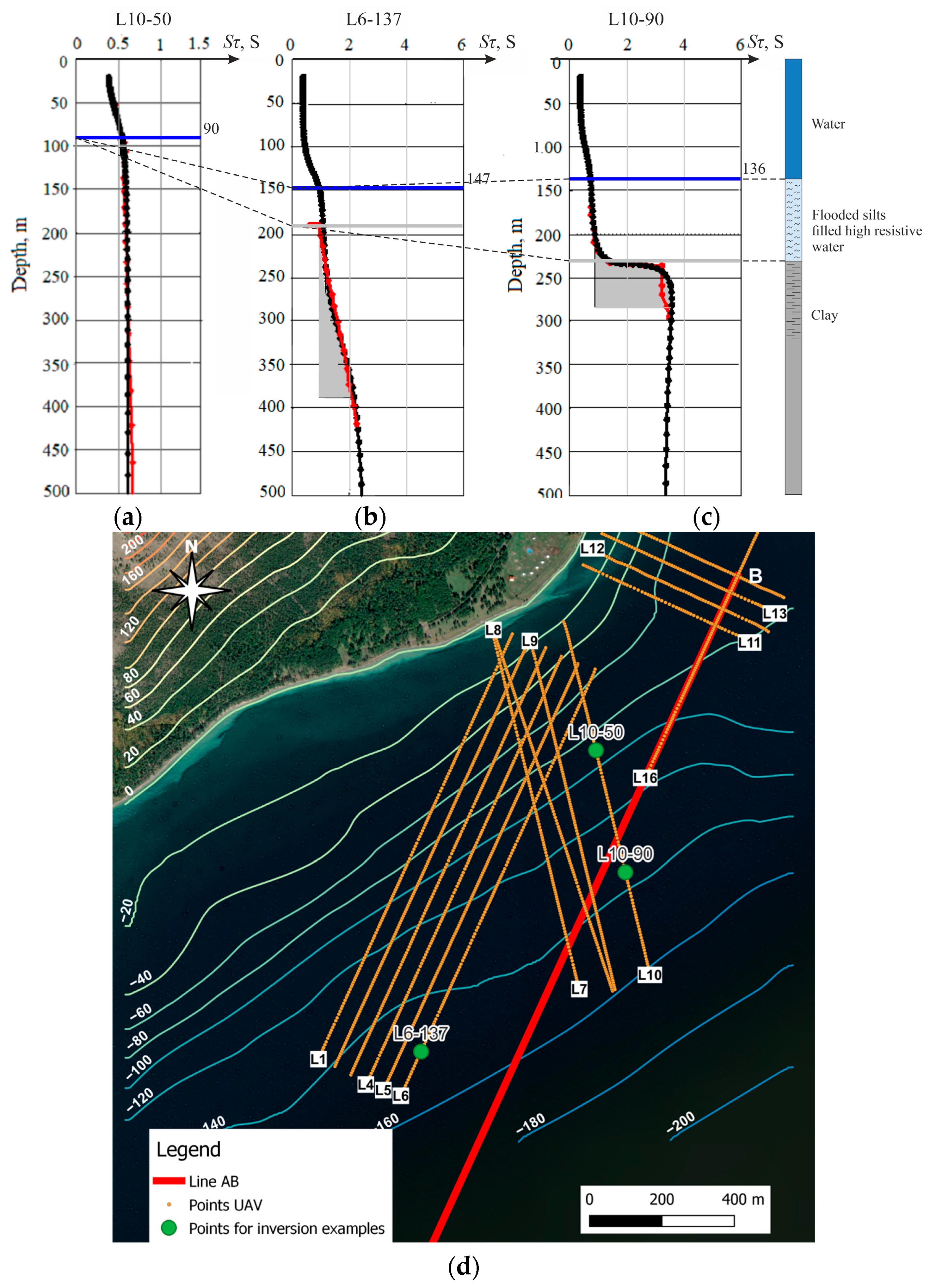
We transformed all EMF readings collected in the survey area into curves of apparent longitudinal conductivity. Three types of curves
Sτ(
H) were identified over the coastal part of Lake Baikal (
Figure 7). For each curve, geoelectric models corresponding to the field curves were calculated. The parameters of the geoelectric sections are presented in
Table 6.
Figure 7 shows the
Sτ(
H) curves of field data in red and theoretical
Sτ(
H) curves in black. Obviously, there is no information corresponding to the upper layer of water due to the impossibility of recording signals with the receiver MARS 2 at such early times. Therefore, data on the resistivity (110 Ω·m) of the first water layer are determined using mathematical modeling (
Table 6).
Figure 7a demonstrates
Sτ(
H) for the high resistive section where bottom sediments are absent. Curve
Sτ(
H) (
Figure 7b) shows another type of high resistive section. For this type and also for type “c” (
Figure 7c) at depths of 180 m and 215 m, there are bottom sediments with a resistivity of 160–180 Ω·m, represented by flooded silts. The increased resistivity of silt can be explained by its presence of unconsolidated or weakly consolidated rocks saturated with fresh water and extremely low mineralization. However, at these depths, there are no conditions for the formation of gas hydrates, and an increase in resistivity is evidenced by methane currents diffusing from deep layers into the water.
Model 3 shows the geoelectrical parameters acquired over low-resistive bottom sediments. A considerable increase in longitudinal conductivity caused by a layer with a resistivity of 40 Ω·m (about 1.875 S) is observed. There are sediments with higher longitudinal conductance (over 3 S) in the investigated area.
It is obvious that the parameters of the models fully correspond to the TEM data collected in nearby areas of Lake Baikal by a research team from SigmaGEO LLC (Irkutsk, Russia). In this area, the TEM instrument called ‘FastSnap’ has been tested in 2017. Several sounding curves have been recorded by “ground measurements on ice” [
16]. Therefore, there are independent geoelectrical results. According to this survey, the area of the delta of the Goloustnaya River consists of three layers: lake water with a resistivity of about 160 Ω·m underlain by bottom sediments with a resistivity of about 60 and 20 Ω·m, which can include some ultra-low-and highly resistive units. According to our data, strata of conductive material with a resistivity of 10–50 Ω·m are located beneath the bottom sediments.
Analyses of curves show that the method Sτ reliably described the geoelectric parameters of the studied sections. Thus, the use of the Sτ method for the interpretation of airborne TEM data allows for obtaining models of the geoelectric sections that are quite close to real ones.
Since the position of the receiver Q in an airborne survey can be significant at a distance from AB, it will most likely correspond to the transition zone between the “near” and “far” zones. In this case, the method described above cannot be used. Therefore, it is necessary to modify this method for the large array being used. The sequence of the interpretation procedure is as follows:
1. Smoothing EMF readings. The readings in the interval of 50 μs–1.1 ms are mostly distorted by noises. In addition, in the vicinity of the AB line, powerful distortions are observed in the range of 110–190 ms. These distortions and noise were eliminated by logarithmic interpolation and smoothing.
2. Integration
, calculation
. The value of the vertical component of the magnetic induction
depends only on the parameter
m [Equation (4)]:
Thus, we transform the EMF readings into curves
over the entire time interval:
Since the EMF curves are recorded over a limited time range, it is necessary to increase this interval until the contribution of the value of the integration element will be insignificant (at least up to 11 ms). Further, from the calculated total sum of elements , the elements are sequentially subtracted. The line AB is not a dipole and the integration is performed over all elements of , taking into account their distances and angles between as well as, the surface projection of the receiving loop.
3. The result of the integration [Equation (11)] can be verified by the differentiation of with respect to t [Equation (5)].
4. Smoothing curves .
5. Finding at each sounding. At each time for the given parameters of the array, we ensure the coincidence of the transformed and the theoretical curves and determine . At this stage, in fact, we still do not know either the electrical conductance of the effective S-plane or its depth.
6. Now, for a given function , we calculate the theoretical curve for a new array, which means for a small loop-in-loop configuration (AB = 50 m, R = 25 m) located on the ground (z0 = 0).
7. Differentiating the theoretical with respect to the time t we obtain for a new array. Such theoretical curves allow us to apply the method to each TEM reading.
8. Smoothing of the signals.
9. Calculation
Sτ(
H) as described above [
11] [Equation (11)].
10. Smoothing Sτ(H).
11. The depth of the “floating” plane can be calibrated using available drilling data (in our case, there are bathymetry data of the Bolshoe Goloustnoe site of Lake Baikal). Depending on the distance from the AB line, the depth is calculated as
12. Visualization of Sτ(H) along profiles (2D) and over the entire area (3D).
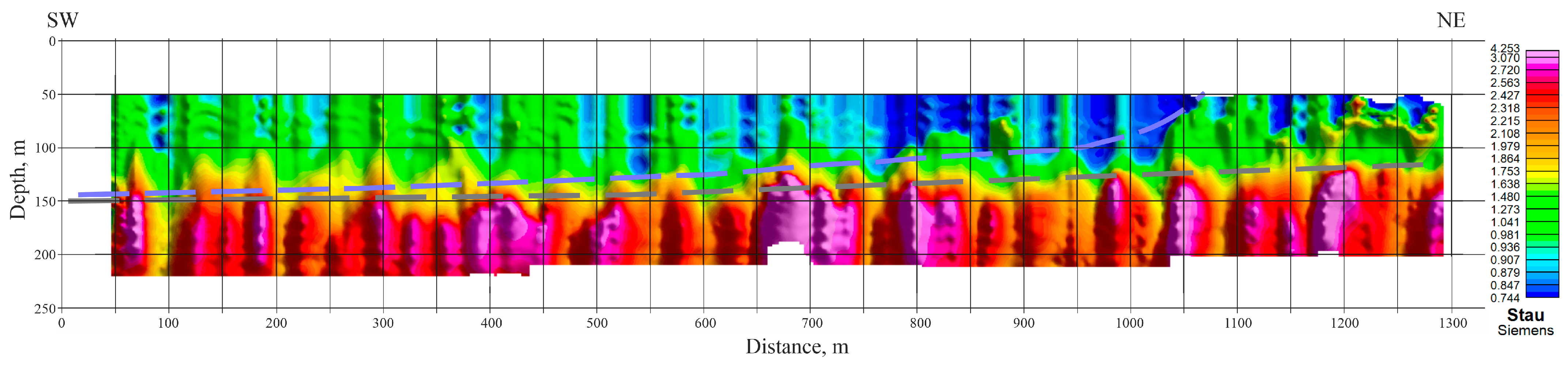
Each reading was transformed into apparent longitudinal conductance
Sτ(
H). An example of a cross-section of
Sτ(
H) for profiles 2 and 6 is shown in
Figure 8 and
Figure 9. The sections clearly show a high-resistivity layer corresponding to Baikal water and sedimentary deposits characterized by low resistivity. High resistivity bottom silt and clayey sediments cannot be distinguished on the
Sτ(
H) curves as two separate layers. In this case, both layers appeared as a single weak conductor (Curve 2,
Figure 7). If the electrical conductivity of clays is low, eddy currents are concentrated in this layer. The information on the bottom silt layer can only be obtained using mathematical modeling data. A comparison of the
Sτ(
H) along profiles 2 and 6 shows an excellent correlation between the main blocks of the section. On the right side of the profiles, the apparent longitudinal conductance of the water increases due to the inflow of contaminant materials brought from the shore by wind and Goloustnaye River flow.
In the center of the profiles, the longitudinal conductance of water decreases, but at the ends of the profiles (left western part), the depth of the lake increases and, accordingly, increases the conductance of the water layer. Unfortunately, it is not possible to determine the exact thickness of the water since the electromagnetic field in high-resistive materials propagates at a high velocity . This fact does not interfere with studying the structure of underlying sedimentary deposits.
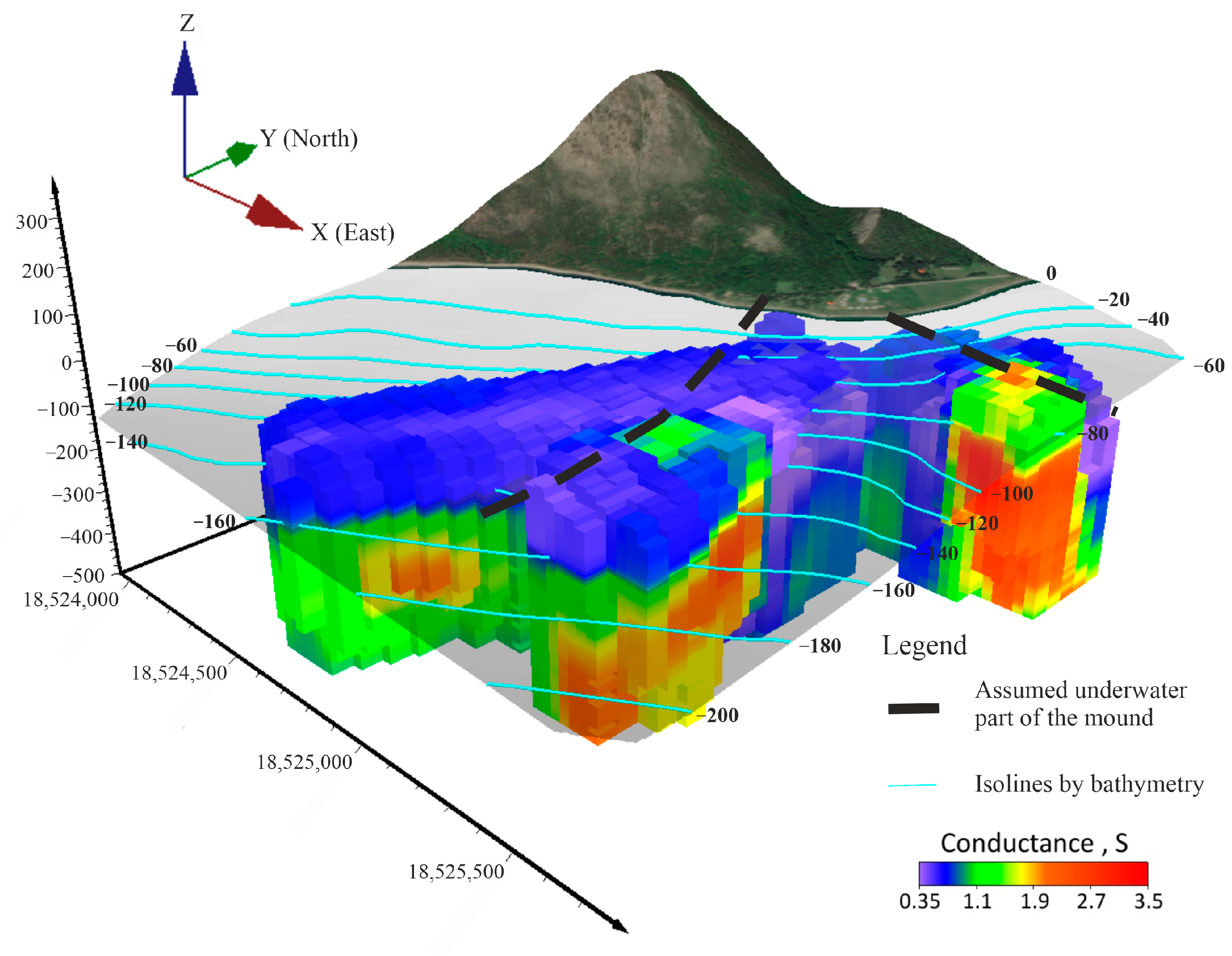
A sufficiently dense network of profiles made it possible to present a 3D visualization of the TEM data using the model of a “floating” plane.
Figure 10 and
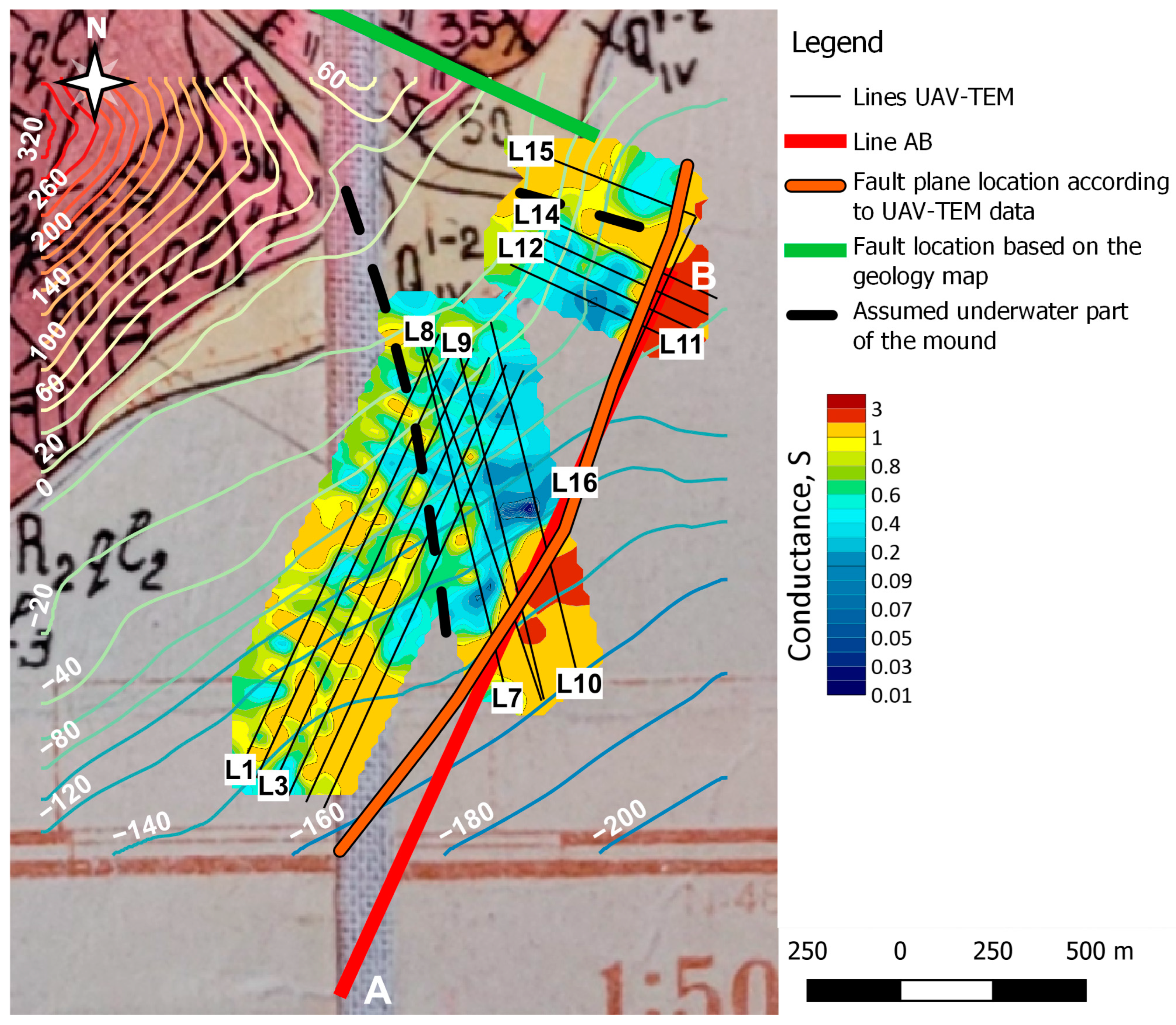
Figure 11 demonstrate a 3D geoelectrical model of the survey area with the topography of the coastal zone. The isolines of the bottom area are applied to it. The 3D geoelectrical model demonstrates an excellent correlation of high-resistive and low-resistive blocks not only along the profiles but also over the area. The results show that high-resistance objects stand out under the water layer of 100–220 m in conductive sediments to a depth of at least 200 m. In these areas, the apparent electrical conductivity of the underwater section decreases to zero, and the total conductivity of the soundings is determined only by the electrical conductivity of the lake water. The revealed block of high resistance is a continuation of the release of indigenous metamorphosed Proterozoic age rocks. This block can be traced on the map of the total longitudinal conductivity of the bottom sediments in the studied area (
Figure 12). On the top of the ground, the green line of the echelon fault runs along the crest of the hill through a probable seismic dislocation and reflects shear deformation within the zone of influence of the coastal fault, which can be traced deep into the lake.
Outside of high-resistance blocks, the conduction of the lacustrine sediments increases with depth. The distribution of the electrical conductivity of these coastal sediments is mosaic in nature with a conductivity of 0.3–3 cm, probably due to the presence of coarse-grained material.
The presence of local high-resistive inclusions in the bottom sediments at a depth of 450–500 m down to 100 m may be regarded as lenses of gas hydrates, which were repeatedly observed in Baikal during expeditions of the Limnological Institute of the Siberian Branch of the Russian Academy of Sciences [
17,
18].
The zone of abrupt transition from a zone of low electrical conductivity in the left part to a zone of high conductivity in the right part is caused by a coastal fault with a system of discharges. The approximate location of this fault is shown in
Figure 12 with an orange dotted line.
Thus, the data obtained do not contradict the results of previous works but complement them.


 and
and 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}