1. Introduction
Reconfigurable intelligent surfaces (RISs), which are composed of a massive number of low-cost and passive reflection elements that can reflect the incident signal with an adjustable phase and/or amplitude shift, have attracted great attention in the recent past. Different from a specular reflector, a RIS can effectively control the propagation channel, as its elements can be individually controlled by a low-power external logic to redirect the incident electromagnetic wave towards an arbitrary direction or a specific location. As a nearly passive low-cost planar structure, the RIS can be easily deployed in the environment and allows for smart radio environments to be realized [
1,
2].
Motivated by these preferable features, RISs were firstly introduced into wireless communications [
3,
4,
5], and it has been shown that with the assistance of a RIS, the performance of wireless communication systems can be significantly improved. In [
6], RISs were introduced to alleviate communication channel fading and improve the signal-to-noise ratio. A RIS-assisted single-cell wireless system was studied by the authors in [
7], and it was verified that a RIS can enhance the spectrum and energy efficiency as well as reduce the implementation cost of future wireless communication systems. Luo. et al. considered the spatial modulation for the uplink communication of a RIS-assisted system [
8], which investigates the transmit spatial modulation scheme and jointly optimizes the RIS reflection coefficients to achieve a lower symbol error rate (SER) and enhance the system reliability. Ref. [
9] instead considered the downlink multiuser communication in a single-cell network, and the RIS phase offsets were optimized to increase the system energy efficiency. In [
10], the RIS was employed to cope with the non-line-of-sight paths, which resulted in significant gains to the system sum rate to meet the challenge of enabling large-scale access for Internet of things (IoT) devices. In [
11,
12], passive beamforming and trajectory optimization was considered for a RIS-assisted unmanned aerial vehicle (UAV) secure communication scheme to maximize the average secrecy rate. Moreover, radio localization with the aid of RISs has been researched by the authors in [
13,
14,
15]. Owing to the potential of RIS in mitigating multiuser interference (MUI), the RIS-assisted dual-function radar-communication (DFRC) system has been investigated. In [
16], the minimization of MUI under the strict beampattern constraint by jointly optimizing the DFRC waveform and RIS phase shift matrix was studied. A double-RIS-assisted coexistence system was considered by the authors in [
17], and the beamforming of RISs and radar were optimized to maximize communication performance while maintaining radar detection performance.
More recently, researchers have started to investigate the RIS benefits of RIS-assisted radar systems. Traditionally, the propagation channels between the radar and the targets have been passively adopted, which limits the performance of the radar. By exploiting the potential of RISs in achieving smart radio environments, the author in [
18] first incorporated the radar system with the RIS technique to improve the target detection performance. The RIS-assisted MIMO radar was considered [
19,
20], where RIS phase shifts were designed to improve the detection performance. In [
21], the authors dealt with the use of RISs for radar surveillance in non-line-of-sight (N-LOS) scenarios. Zhang et al. extended the application to the multi-target scenario by jointly optimizing both radar waveforms and RIS phase shifts to improve the multi-target detection performance [
22]. In addition to target detection performance, parameter estimation is also of concern. Grossi et al. studied the joint detection and localization of a prospective target with the receiver assisted by a RIS [
18], and the DOA-based target positioning in a RIS-assisted MIMO radar system was considered by the authors in [
23]. The available studies have focused on the design of the phase shifts of RIS elements, which optimizes the channel conditions between the radar and the targets to improve the target detection and/or location performance of the radar systems.
However, this has not been applied in radar electronic counter-countermeasures (ECCMs). The practical radar systems always work with exposure to complicated electromagnetic environments, and radar ECCM ability is of great significance for their survival and operation performance in electronic warfare [
24,
25,
26]. Among electronic countermeasure (ECM) techniques, active deception jamming is an important jamming pattern faced by radar. The radar ECCM ability of monostatic radar is limited due to its single view angle. A distributed multi-radar fusion system is an important development trend, benefiting from the advantages of multiple-view detection and information fusion [
27,
28]. Deception jamming cancellation methods proposed in a multi-radar system can be divided into data-fusion-based and signal-fusion-based methods. Data-fusion-based methods discriminate the deception jamming from the local measurements obtained, exploiting the difference in spatial location aggregation characteristics of true and false targets [
29,
30,
31]. Signal-fusion-based methods counter the deception jamming by fusing the target amplitude or the original echo signals from the local sites [
32,
33,
34], exploiting their differences in target spatial scattering characteristics [
35,
36].
Although a multi-radar system can exhibit excellent anti-jamming performance, its construction conditions are harsh, especially in the case of complex electromagnetic jamming. Firstly, each radar is usually responsible for different tasks, and the overlapping monitoring area is small, so it is difficult or costly to realize simultaneous detection. However, for the built multi-radar system, the system is always faced with destruction, such as damage to the sites or the breakdown of communication links. Therefore, the ECCM ability of monostatic radar will still directly determine the radar survivability, and the key to improving it is to realize the distributed target detection for monostatic radar.
Therefore, we are motivated to introduce the RIS technique into the radar ECCM system. Its excellent characteristics in controlling the propagation channel provide a new method of assisting monostatic radar to construct distributed detection conditions, which is a very promising research direction. By applying the RIS to monostatic radar, a virtual multi-radar system was constructed, combined with the multi-beam receiving technology. Then, the data-fusion-based deception ECCM method was studied to effectively discriminate the deception targets. The theoretical analysis for the discrimination probability of the proposed deception ECCM method is given, followed by the location optimization of RISs. Simulation results corroborate the deception ECCM ability of the proposed RIS-assisted virtual multi-radar system.
The rest of this paper is organized as follows: In
Section 2, the target and deception jamming system model of the constructed virtual multi-radar system is given. In
Section 3, the data-fusion-based deception ECCM method is provided to discriminate the active false targets. In
Section 4, the theoretical analysis of the discrimination probability and the location optimization of RISs are studied. The simulation results are provided in
Section 5. And the discussions are given in
Section 6. Finally, the conclusions are drawn in
Section 7.
2. System Model
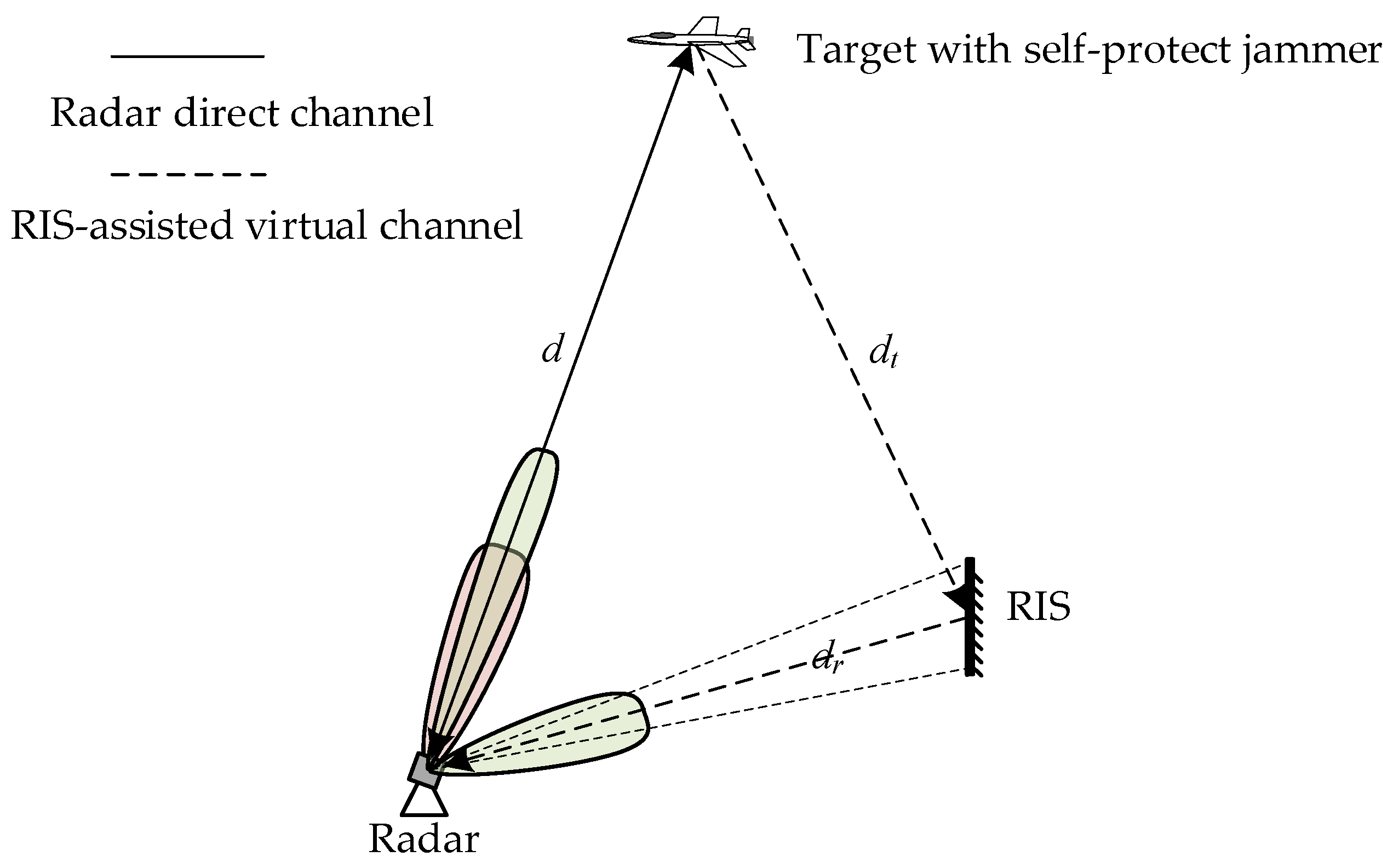
Consider a radar deception ECCM problem where the radar is assisted by RISs. In
Figure 1, a radar with one RIS is shown as an example. The target is illuminated by the radar-transmitted signal, and its echoes are collected by the radar and the RIS. In the radar, the multi-beam receiving technology is applied, and multiple receiving beams are directed at the target and the RIS to receive target direct echoes and the reflected echoes from the RIS, respectively. Then, a multi-view detection of the target is realized by introducing the RIS to the radar. In the direct channel, the target echo is received by the radar. In the RIS-assisted virtual channels, the target echo is reflected by the RIS, and the reflected signal is then received by the radar. To protect the target, a self-protect jammer implements deception jamming to the radar through both the direct and the virtual receiving channels. Obviously, a virtual multi-radar system is constructed here by taking advantage of the ability of the RIS to reconstruct the signal propagation environment, which will provide more freedom to significantly improve the anti-jamming ability of the monostatic radar.
For cooperative anti-jamming, the received and reflected beams of the RIS should be controlled by adjusting the phases of the RIS reflectors, which is designed by the radar station through the transmission link. The reflected beam of the RIS should point to the radar in the virtual multi-radar system. The received beam of the RIS should be followed by the transmitting beam of the radar and should scan all the detected areas for every transmitting beam. This is because the radar serves as the only transmitting station, and the RIS-assisted virtual channels detect the target by receiving the target echo reflected by the RIS.
However, for the reliable anti-jamming ability of the virtual multi-radar system, the RIS station should be distributed from the radar to ensure a sufficient target detection angle difference among the direct and virtual receiving channels.
The radar waveform is assumed to be narrowband, and the impinging wavefield can be approximated as a plane wave in the paths between the radar and the target, the target and the RIS, and the radar and each element of the RIS. As is shown in
Figure 1,
,
, and
refer to the range between the radar and the target, the target and the RIS, and the radar and the center of the RIS.
In the radar direct channel, the target echo
is
where
is the target amplitude;
is the radar transmitted signal;
refers to the time delay;
is the speed of light; and
is the channel noise following the Gaussian distribution.
In the RIS-assisted virtual channel, the target echo
is
where
;
L is the number of sub-
-sized surface elements of the RIS;
is the target amplitude from the
l-th element of the RIS;
and
are the target phases of the target–RIS and RIS–radar channels, respectively; and
is the adjustable RIS phase of the
l-th reflecting element of the RIS. To achieve the highest SNR for the under-test resolution cell,
.
refers to the time delay in the RIS-assisted virtual channel. Gaussian noise
is independent from
.
In the radar direct channel, the received deception jamming
can be written as
where
,
, and
are the signal amplitude, phase, and deceptive time delay, respectively. The one-way time delay
.
is the transmitted deception jamming signal, which is usually the same signal as
.
In the RIS-assisted virtual channel, the received deception jamming
can be written as
where
is the jamming amplitude from the
l-th element of the RIS. The phase
,
, and
remain the same. The one-way time delay
.
The problem is discriminating the false target generated by the jammer by exploiting the additional received signals available in the RIS-assisted virtual channel.
3. Deception ECCM Method
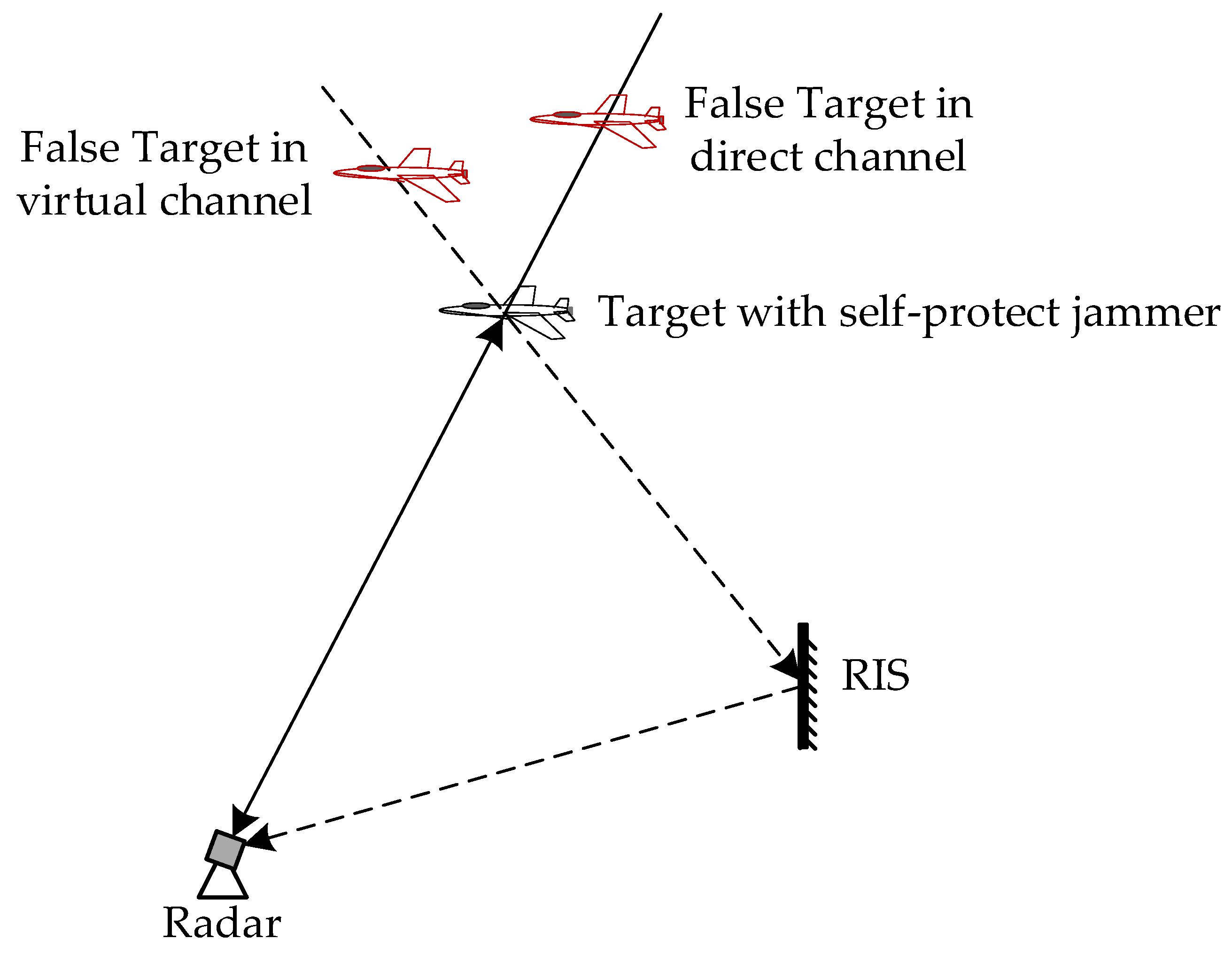
The theoretical basis of the data-fusion-based deception ECCM method is the difference between true and false targets in the spatial dispersion of the location, as shown in
Figure 2. For the true target, which has the characteristics of spatial aggregation, its measurements in different detection channels are relatively concentrated after being converted to the unified coordinate system and they exist in an error ellipse determined by the measurement errors.
Active false targets are generated by the self-protect jammer by modulating and delaying the transmission signal of the received radar. Due to the difficulty of angle deception, the false targets generated by the jammer are located on the extension line between the jammer and the receiving station. In the direct channel, the false target is located on the extension line between the jammer and the radar, and its distance to the jammer is the deception range. In the RIS-assisted virtual channel, the false target is located on the extension line of the incident beam of the RIS pointing to the jammer. The false targets generated by deception jamming in the direct and virtual channels do not coincide in terms of their spatial positions; therefore, the location results of false targets obtained in different channels are relatively dispersed in the unified coordinate system. According to this difference, the target measurements can be used to discriminate the false targets.
In the constructed architecture in
Figure 1, the target measurements can be obtained in the radar direct and RIS-assisted virtual channels.
3.1. Radar Direct Channel
The target measurement is the same as for the normal radar, including the range and angle measurements. Taking the two-coordinate radar, for example, the target measurement includes the range
and angle
, and the measurement vector is
, where
represents the matrix transpose. Then, the target would be located at
,
with
being the radar location. The location error can be described by the location covariance matrix
, and
stands for taking expectation. By the approximate linearization of (5),
can be written as
, and the transition matrix
is
Then, the location covariance matrix
is
where
, and
and
are the radar measurement errors of the range and angle, respectively.
3.2. RIS-Assisted Virtual Channel
The target range can also be measured by estimating the time delay in the RIS-assisted virtual channel, which corresponds to the range sum of the path from the radar to the target, then to the RIS, and finally, to the radar. By cutting off the known range between the radar and the RIS, the measured range sum can be equitably considered as a bistatic range measurement with the radar as a transmitter and the RIS as a receiver. In the RIS-assisted virtual channel, the received beam of the radar points to the RIS, and the angle of the target cannot be measured directly in the radar. Because the cooperative anti-jamming is realized by the beam scanning of the received beam of the RIS, the RIS sensing signal can be reconstructed by the radar station with the RIS phases , and the angle of the target relative to the RIS can be measured using the maximum amplitude method.
Let
be the measured range sum, which is the estimation of the range sum of the path from the radar to the target and then to the RIS. The measured angle of the target relative to the RIS is denoted as
. With the measurement vector
, the target would be located at
,
is the range from the target to the RIS,
with
being the location of the RIS. Similar to the derivation of the location error in the direct channel, the location error of
, measured by its location error covariance matrix
, can also be obtained by the approximate linearization,
where
and are the measurement errors of and , respectively. is the angle of the target relative to the radar.
3.3. Discrimination of Deception Targets
For the virtual multi-radar system, true targets have spatial aggregation characteristics, and active false targets have spatial dispersion characteristics. With the redundant measurements in the RIS-assisted virtual channel, the target discrimination statistics are designed, and the problem of discriminating a detected target as a true or false target can be formulated as a binary hypothesis testing problem.
Under the null hypothesis (H0), it is assumed that the detection target corresponds to a true target. Under the alternative hypothesis (H1), it is instead assumed that the target is generated by deception jamming.
The difference in the target locations in the radar direct channel
and the RIS-assisted virtual channel
is defined as the location difference
. To make an optimized decision, the discrimination is inferred from the location difference
in a probabilistic framework. Due to the location errors,
is a random vector following a normal distribution,
where
. Under
, the mean value
, due to the spatial aggregation characteristics of the true targets. Under
, the mean value
is non-zero due to the spatial dispersion characteristics of false targets, as shown in
Figure 2. Therefore, with the constant probability of missing alarms, the discrimination statistic is chosen as the Mahalanobis distance,
The optimal discrimination algorithm is designed as
If the threshold is exceeded, the detected target would be discriminated against as a false target. Otherwise, a true target is declared. The threshold η is set to ensure the required constant probability of missing alarms . For the case with one RIS, the significance of the hypothesis testing . Because under , , where is the chi-square distribution with two degrees of freedom, and is the inverse cumulative distribution function of .
Here, the proposed deception ECCM method is given in the virtual multi-radar with one RIS-assisted virtual channel as an example. It is then extended to the virtual multi-radar with multiple RIS-assisted virtual channels. The multiple RIS-assisted radar can be treated as multiple direct–virtual channel pairs, and multiple discrimination results can be synthesized with a certain fusion rule (such as ‘and’, ‘or’, KM rule) to obtain more reliable discrimination results.
4. Theoretical Performance Analysis and Location Optimization
In this section, the theoretical performance analysis of the proposed discrimination method is given. And, based on the derived discrimination probability, the locations of RISs in the virtual multi-radar system are optimized to ensure the best discrimination performance.
4.1. Theoretical Performance Analysis
The discrimination performance is measured by the total discrimination probability of true targets and the total misjudgment probability of false targets (i.e., the deception probability of the virtual multi-radar). For a virtual multi-radar with M assisted RISs, the total discrimination result is synthesized by M local discrimination results. Hence, the total discrimination probability is determined by the local discrimination performance of each direct–virtual channel pair, which is derived first.
For each direct–virtual channel pair, the location difference
between the direct channel and the indirect channel is a random vector following a normal distribution due to the location errors, as shown in Equation (16). Under
, the mean value
due to the spatial aggregation characteristics of true targets. Under
, the mean value
is non-zero, which can be written as
. Hence, the distribution of
can be given as
where
is the error covariance matrix of the location errors
.
is a symmetric matrix and can be defined as
where
and
represent the accuracy of the x-axis and y-axis location differences, respectively.
represents the correlation coefficient of the location difference between the x-axis and the y-axis.
Under
, the discrimination statistic (Mahalanobis distance)
, and the discrimination threshold
. The proposed data-fusion-based deception ECCM method can discriminate the false targets under the condition of ensuring that the misjudgment probability of true targets is equal to
. Therefore, the local discrimination probability of true targets
is
Under , the mean value of the location difference is jointly determined by the radar location , the RIS location , the location of the true target , and the deception distance .
The location of the false target measured in the direct channel is
, and
where
are the coordinates of the true target in the radar polar coordinate system in the direct channel, with
and
.
The location of the false target measured in the indirect channel is
, and
where
is the distance sum of the target in the indirect channel, and its corresponding azimuth is
.
According to Equations (22) and (23), the mean value
of
can be obtained as
Then, the two-dimensional probability density function of
can be written as
The discrimination statistic
can be further simplified as
where
and
.
According to the hypothesis testing model in Equation (19), it can be seen that the misjudgment probability of false targets
can be given as
Substitute Equation (27) into (28),
Hence, the misjudgment probability of false targets
can be expressed as the double integral of the probability density function
of
on the integration area
,
Equation (30) can be simplified as
For a virtual multi-radar with
M assisted RISs, if the total discrimination result is synthesized by
M local discrimination results with the rule of ‘and’, that is, the target is discriminated against as being true unless all
M local discrimination results indicate that it is a true target, the total discrimination probability of true targets
is
From Equation (35), to ensure the required constant probability of missing alarms being , the total discrimination probability of true targets . Then, the significance of each hypothesis testing should be for the fusion rule of ‘and’.
And the deception probability of the virtual multi-radar
is
where
and
are the local discrimination probability of true targets and the misjudgment probability of false targets in the direct–virtual channel pair with the
m-th RIS, which can be obtained by (21) and (32), respectively.
4.2. Location Optimization of RISs
From the above theoretical analysis, the deception probability of the virtual multi-radar is related to the location of RISs relative to the radar and the target. Therefore, the radar deception probability can be minimized by optimizing the location of the RISs, which is discussed in the subsection.
If the distance between the RISs and the radar is greater, the path loss in the RIS-assisted indirect channel is greater, and the target signal-to-noise ratio (SNR) obtained by the indirect channel is lower, which would reduce the target measurement accuracy. If the RISs are located closer to the radar, the difference in the target detection angle between the indirect channel and the direct channel is smaller, and the spatial location dispersion of the active false target becomes worse. This will reduce the difference between true and false targets, leading to the deterioration of the discrimination probability of false targets. Therefore, the optimal location of RISs is a joint optimization problem.
For a detection area , the location of M RISs is optimized to minimize the average deception probability for all targets in the detection area. There are certain restrictions on the optimal location of RISs. First of all, in order to ensure the advantages of multiple perspectives and a certain angle difference, the distance between the radar and the RISs should be greater than a threshold value , where is the location of the m-th RIS, m = 1, 2, …, M. Secondly, the redundant detection of the virtual multi-radar should be ensured for the target discrimination, which requires that the detection area is within the detection range of the system, i.e., , , where is the detection range in the direct channel.
It is assumed that the location range of the RISs is
, and the optimization problem of the location of the RISs can be formulated as
where
,
n = 1, 2, …,
N is the location of the
n-th RIS in the detection area
, and
is the deception probability of the virtual multi-radar when the target is located at
, which can be obtained by Equation (36). For the formulated optimization problem, we can resort to the genetic algorithm.
6. Discussion
Assisted by the RISs, monostatic radar can collect the target echoes in distributed directions, forming a virtual multi-radar system. Based on the above analysis, the data-fusion-based deception ECCM method can be used in the proposed system to discriminate the false targets, and its deception ECCM ability is affected by multiple factors, such as radar measurement errors, deception range, target location, the number and locations of the RISs, etc.
In addition, the proposed discrimination method essentially utilizes the differences in the spatial aggregation characteristics of true and false targets. It is valid for the false targets generated by any type of deception jamming, which is not limited to the range of deception false targets mentioned in
Figure 2. Because the RIS, as an auxiliary receiving platform, is silent in the direction of the target area, the jammer cannot obtain the location of the RIS to generate false targets that match the spatial location of the direct channel in the RIS-assisted virtual channel. Therefore, it is impossible to implement cooperative deception jamming on the virtual multi-radar system with the silent RIS. The spatial dispersion characteristics of false targets are always established, and the proposed data-fusion-based deception ECCM method always works.
In this section, the differences and similarities between the RIS-assisted virtual multi-radar system and the practical multi-radar system are discussed, which are summarized below.
The discrimination algorithms adopted by the two systems are similar. The discrimination statistics are both based on the Mahalanobis distance, and the discrimination methods are based on hypothesis testing algorithms. However, the target measurement in the RIS-assisted virtual channel is different from the practical multi-radar system, which makes the derivation of its location error covariance matrix complicated.
The proposed discrimination algorithm applies data fusion to discriminate true and false targets with the target measurements from different detection channels. As a high-level information fusion strategy, data fusion requires minimal computational complexity. Compared with the deception ECCM algorithm in practical multi-static radar, their computational complexities are similar.
Measurement error, deception distance, and target position have the same effect on the discrimination performance of both systems, essentially because the basic principle of discriminating active false targets is the same. Both systems make use of the difference between true and false targets in the spatial dispersion of the locations from different observation channels.
Simulation results have shown that the discrimination probability increases with the increase in the number of RISs, which is in accordance with the effect of the radar number on the discrimination performance of the practical system. In contrast to the practical system, however, the number of RISs cannot be increased indefinitely to improve its performance. This is because the number of RISs is limited by the maximum number of multiple beams that the monostatic radar can achieve.
Location optimization of the RISs is different from that of the practical multi-radar system. The layout of a practical system is optimized to ensure the maximum radar aperture. As a result of this, the difference in the observation directions of the target is maximized. However, in addition to the maximum observation aperture, the location optimization of the RISs should also consider the influence of the target signal-to-noise ratio (SNR) in the RIS-assisted virtual channel on its measurement error. This, in turn, affects the target discrimination performance.
The deception ECCM ability of the RIS-assisted radar was first discussed, and the data-fusion-based algorithm was extended to the RIS-assisted radar to indicate its excellent anti-jamming ability. As a low-cost passive device, the introduction of the RIS greatly improves the effectiveness and cost ratio of the radar in a complex electronic warfare environment.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}