
Volume Estimation of Stem Segments Based on a Tetrahedron Model Using Terrestrial Laser Scanning Data


Abstract
:1. Introduction
2. Materials and Methods
2.1. Field Data Collection
2.2. Preprocessing
3. Methodology
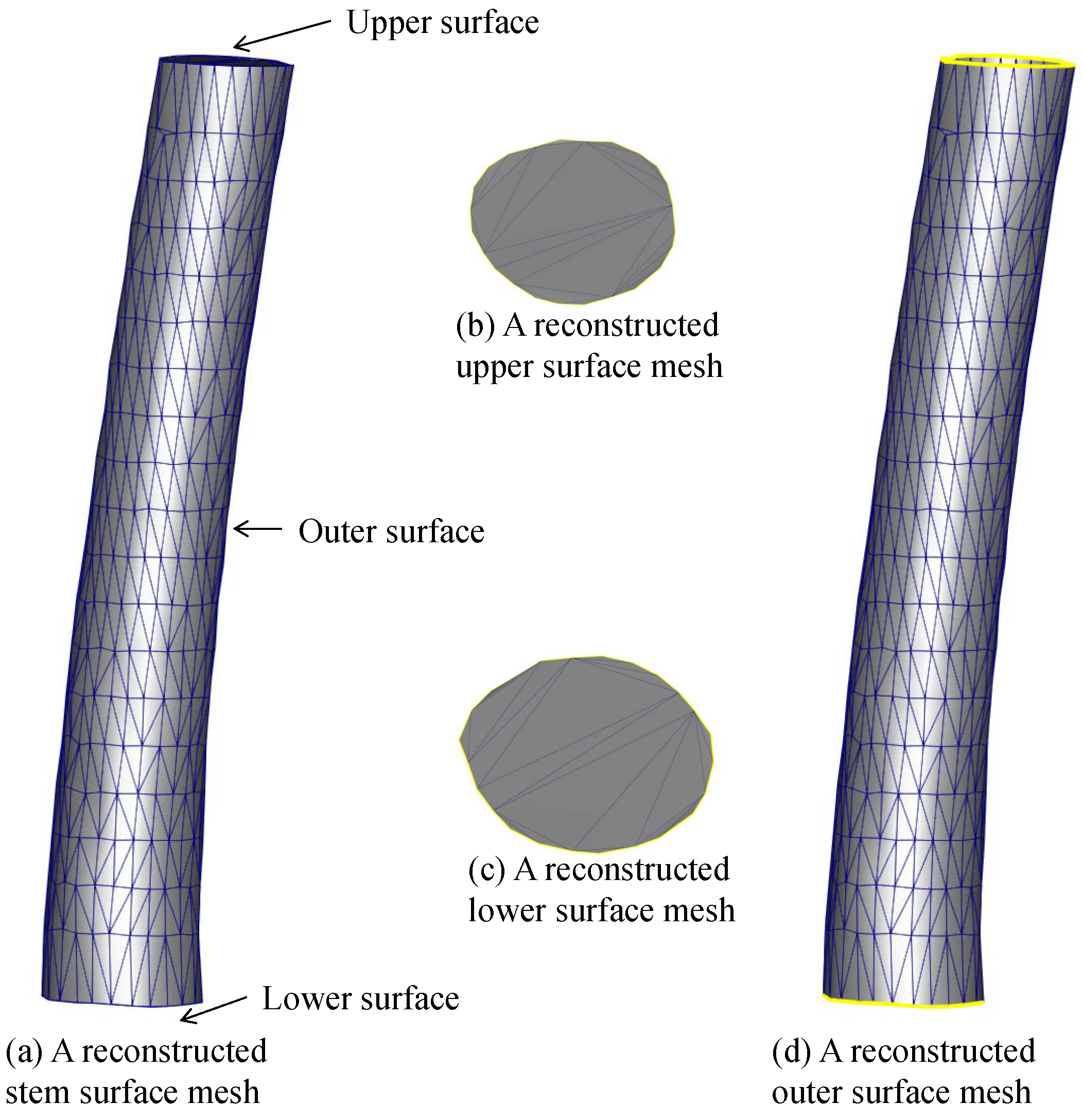
3.1. Initial Stem Segment Surface Reconstruction
3.1.1. Stem Points Downsampling
3.1.2. Lower and Upper Surface Reconstruction
3.1.3. Outer Surface Reconstruction
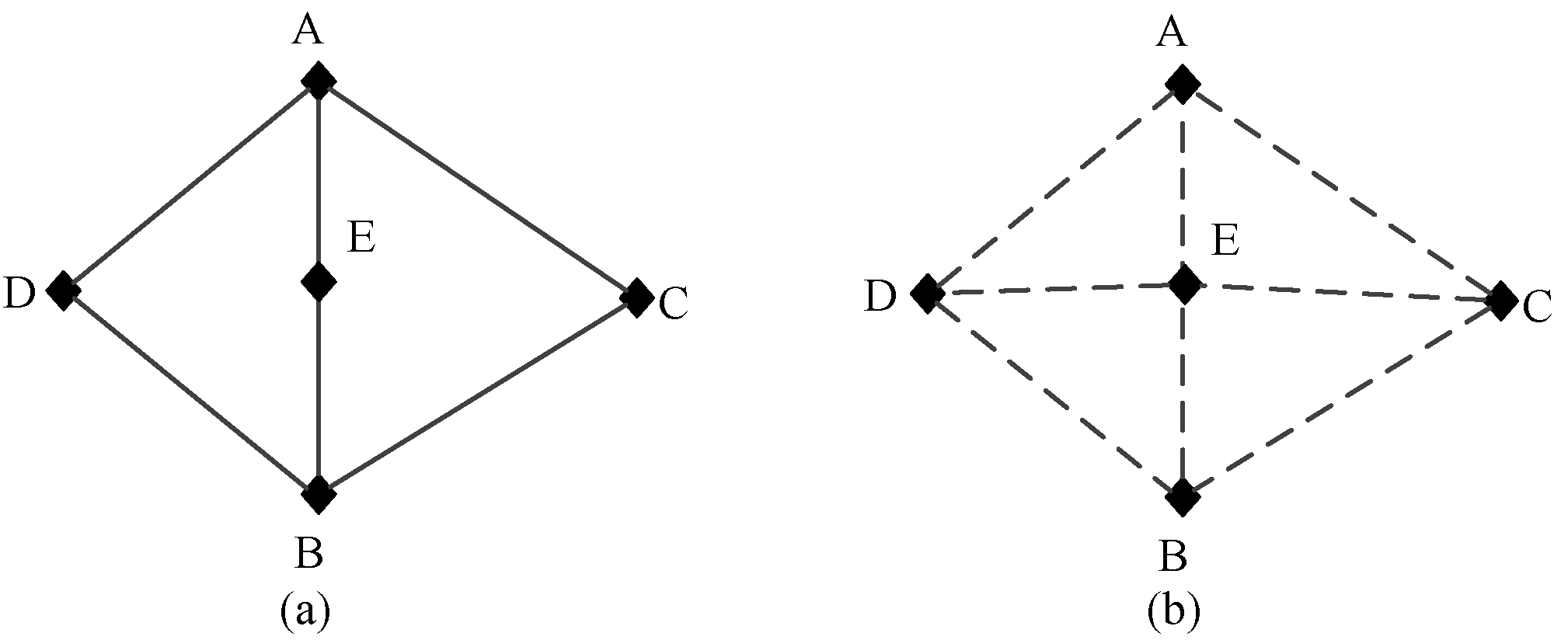
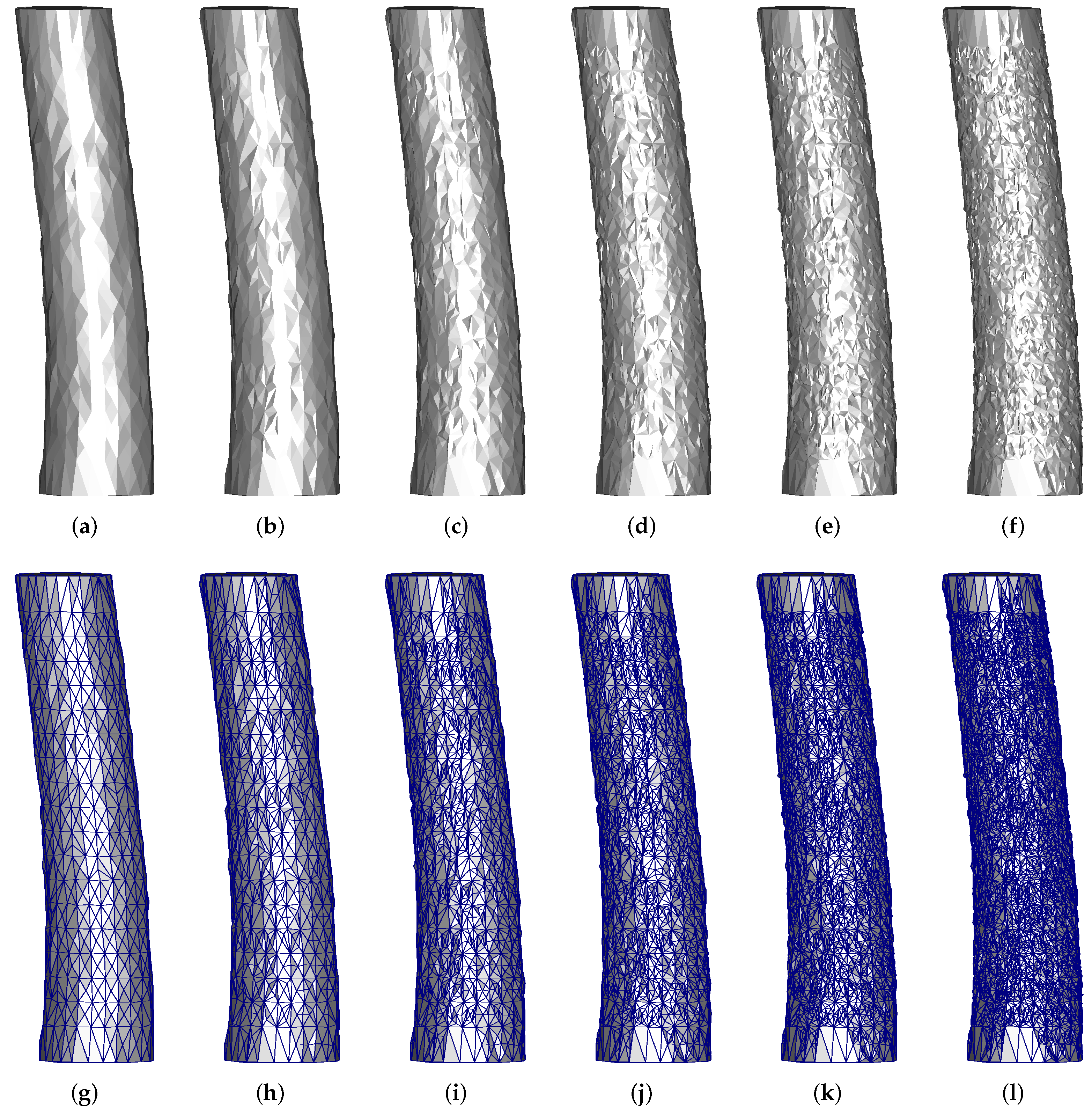
3.2. Stem Segment Surface Subdivision
3.3. Tetrahedron Model Generation and Stem Volume Calculation
3.4. Assessment Method and Indices
4. Results
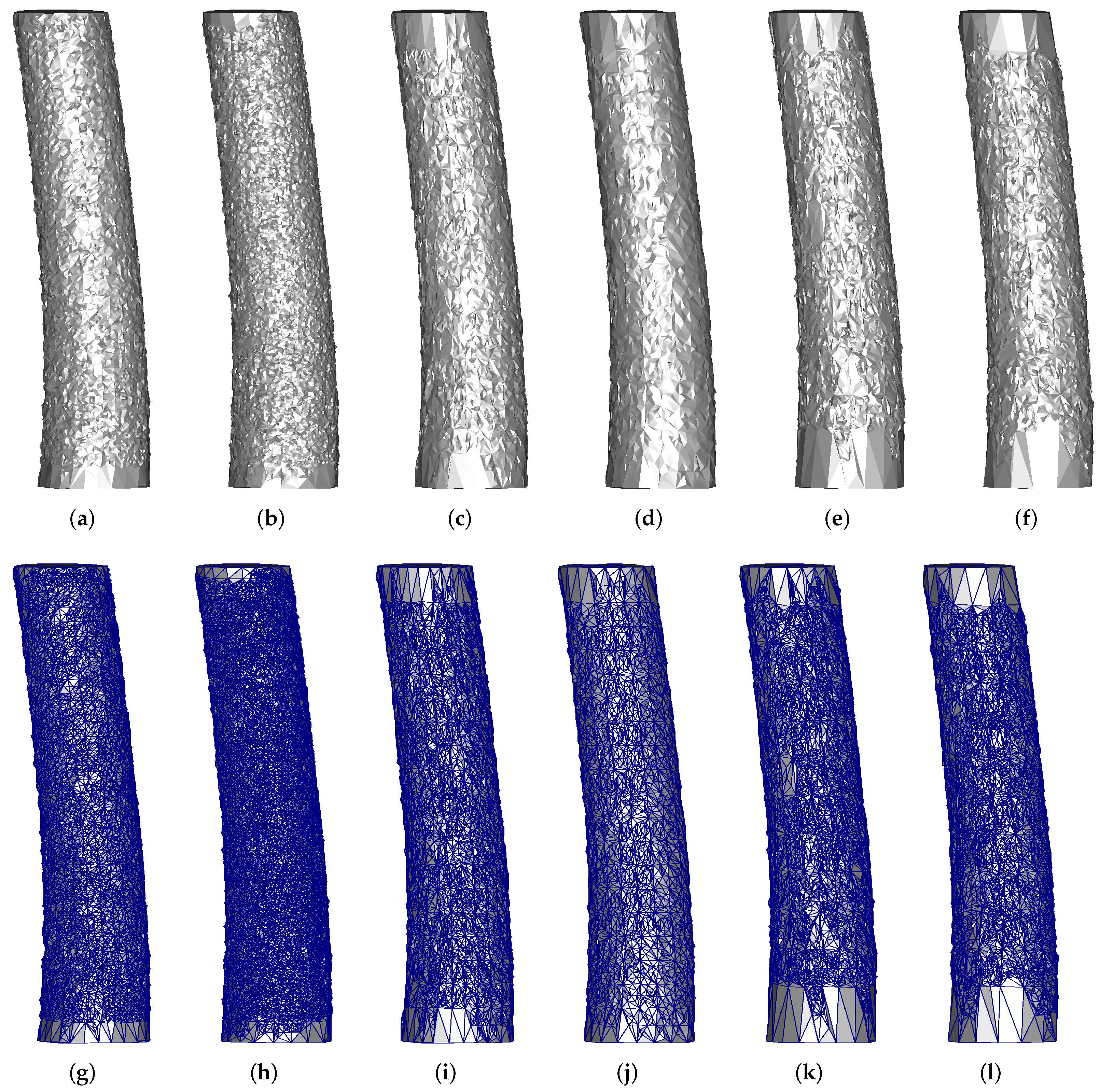
4.1. Volume Calculation of a Stem Segment under Different Iterations
4.2. Volume Calculation of a Stem Segment Using Different Parameters
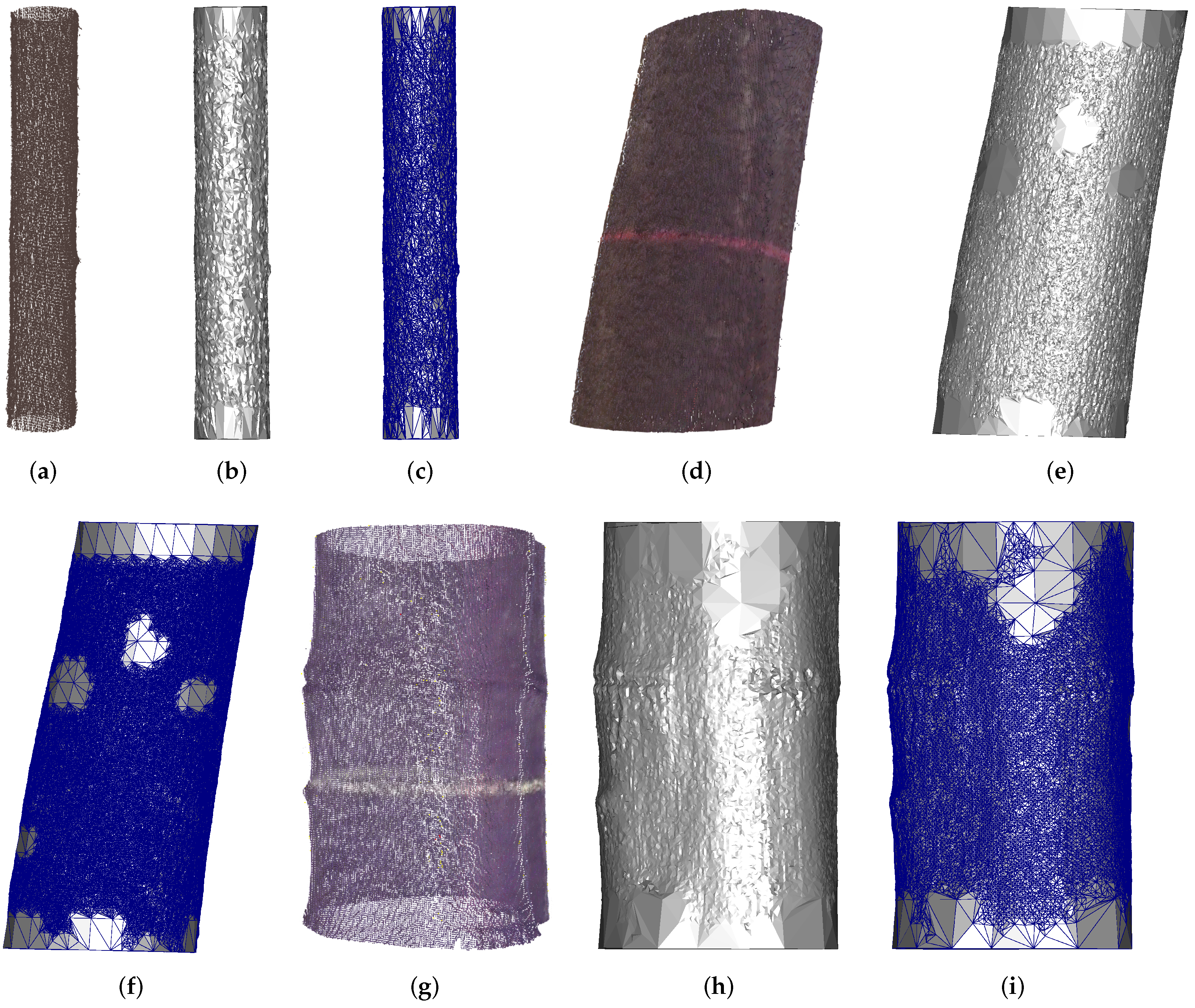
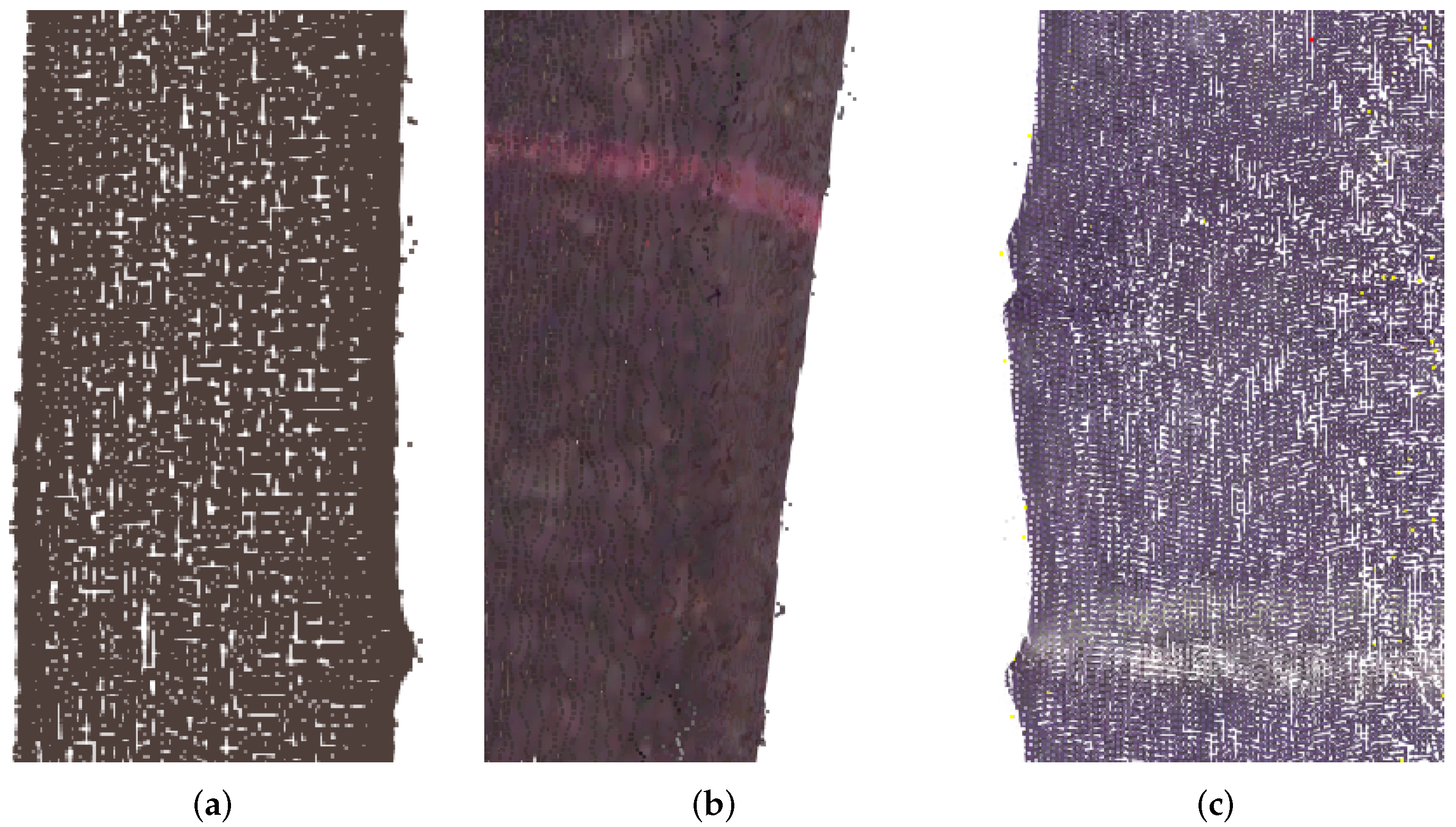
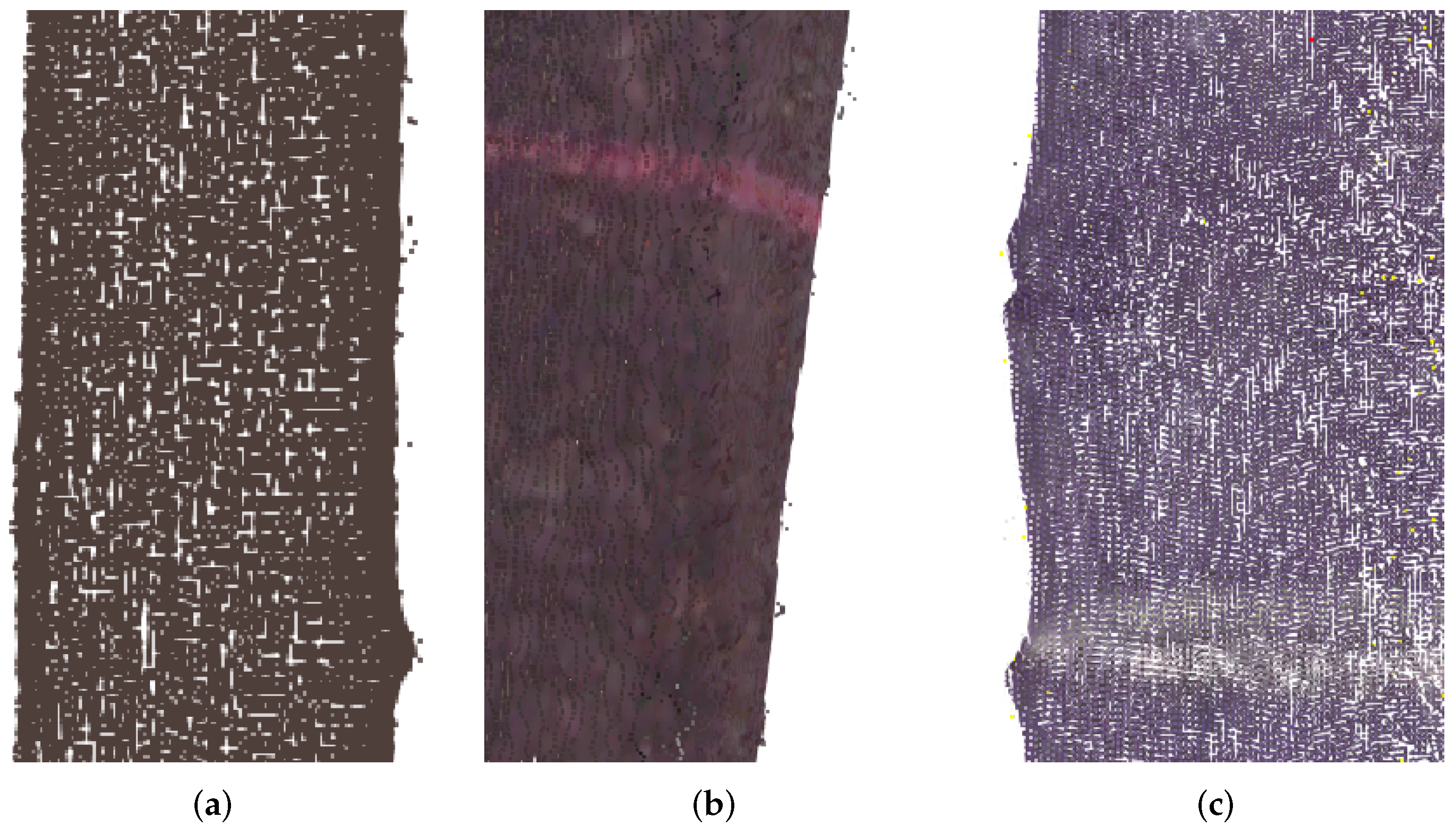
4.3. Surface Models of Stem Segments from Different Tree Species
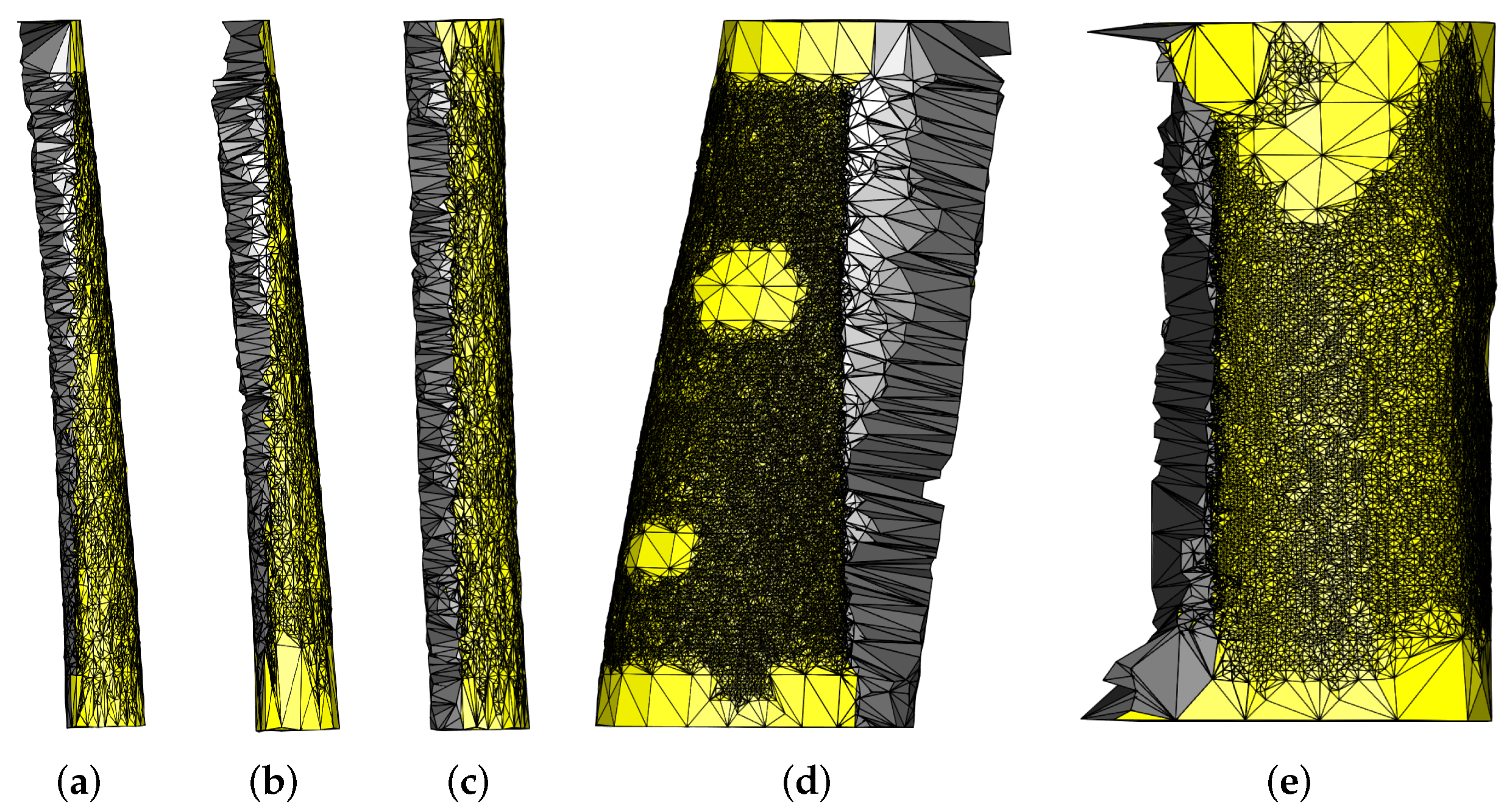
4.4. Tetrahedron Models of Stem Segments
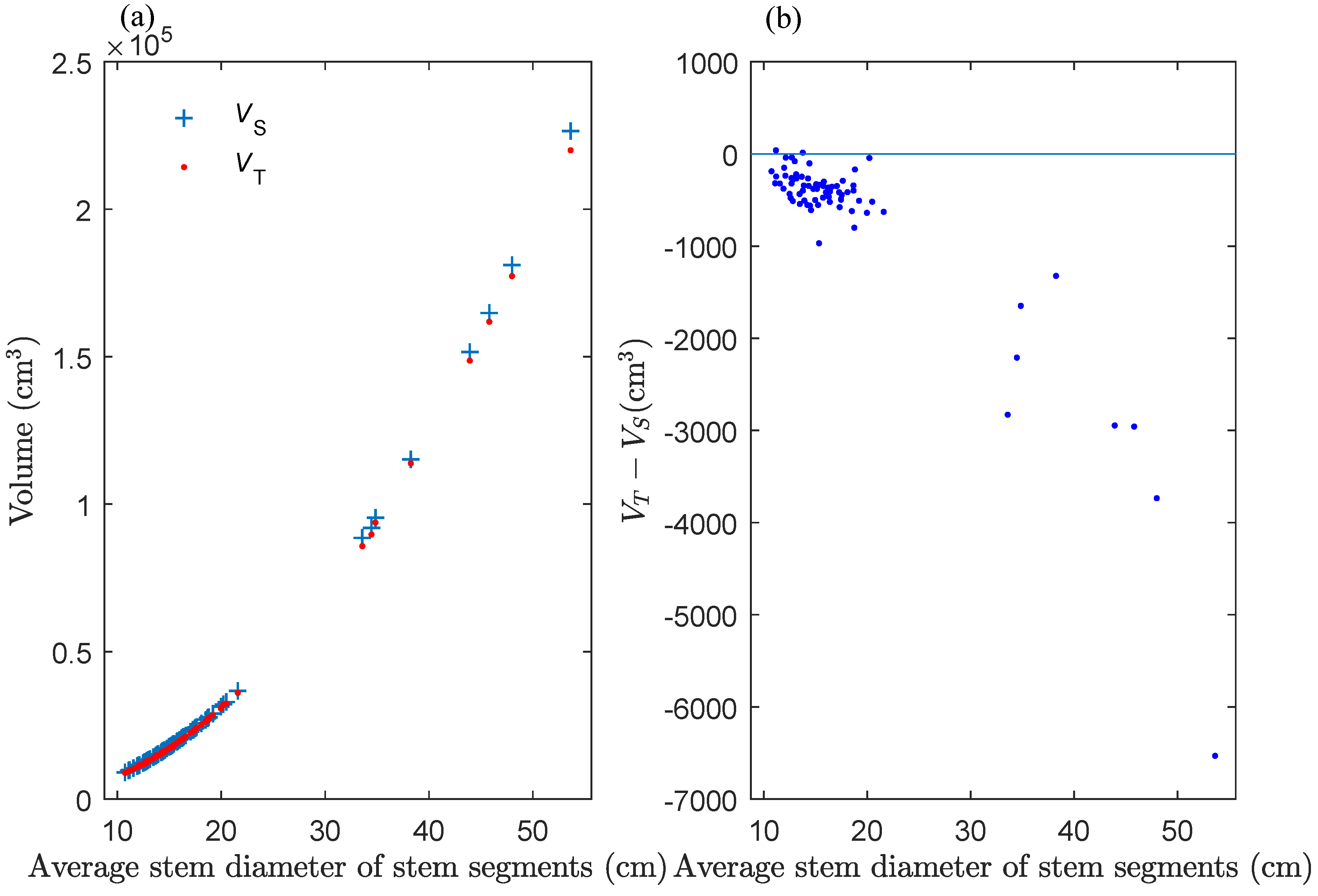
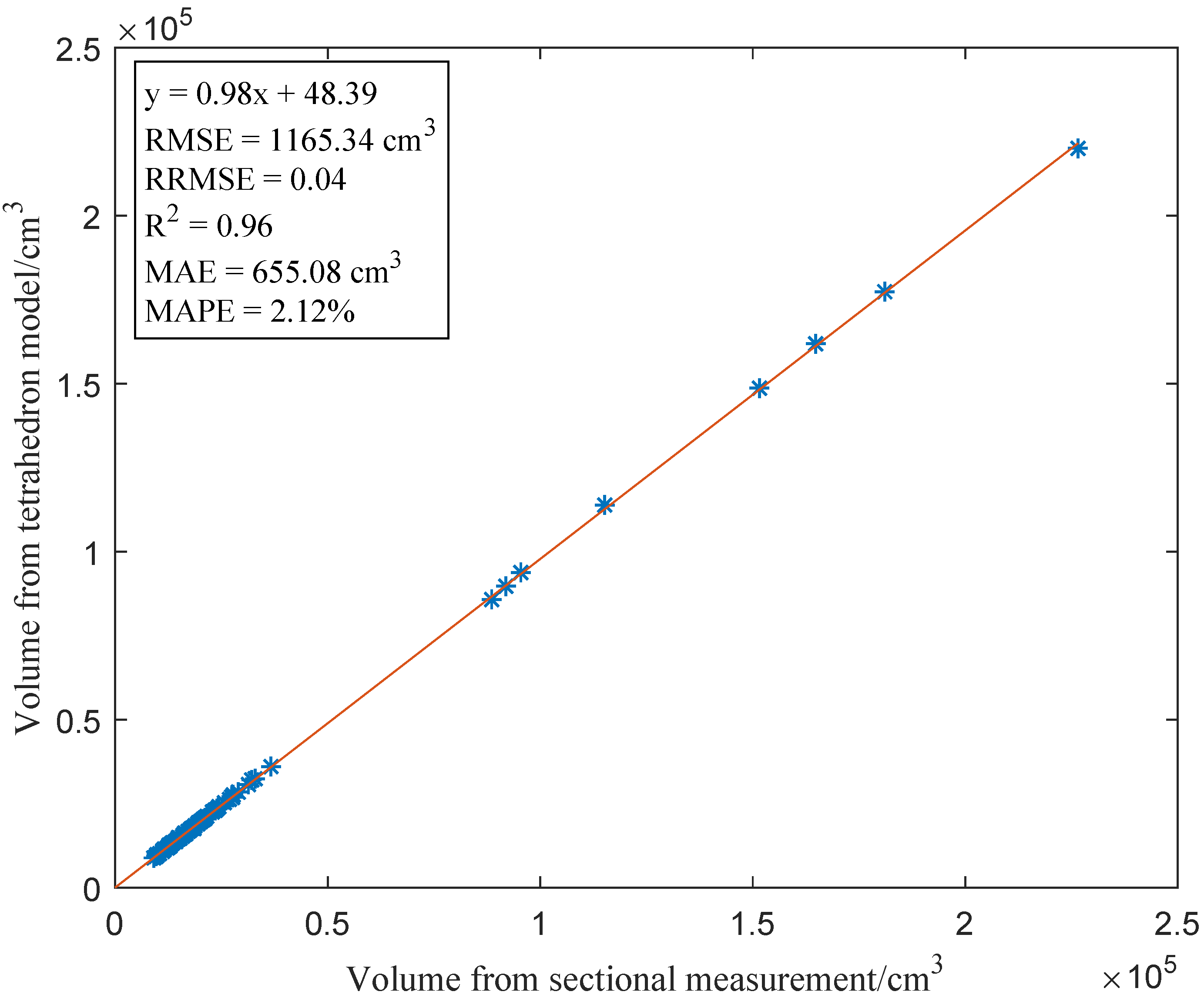
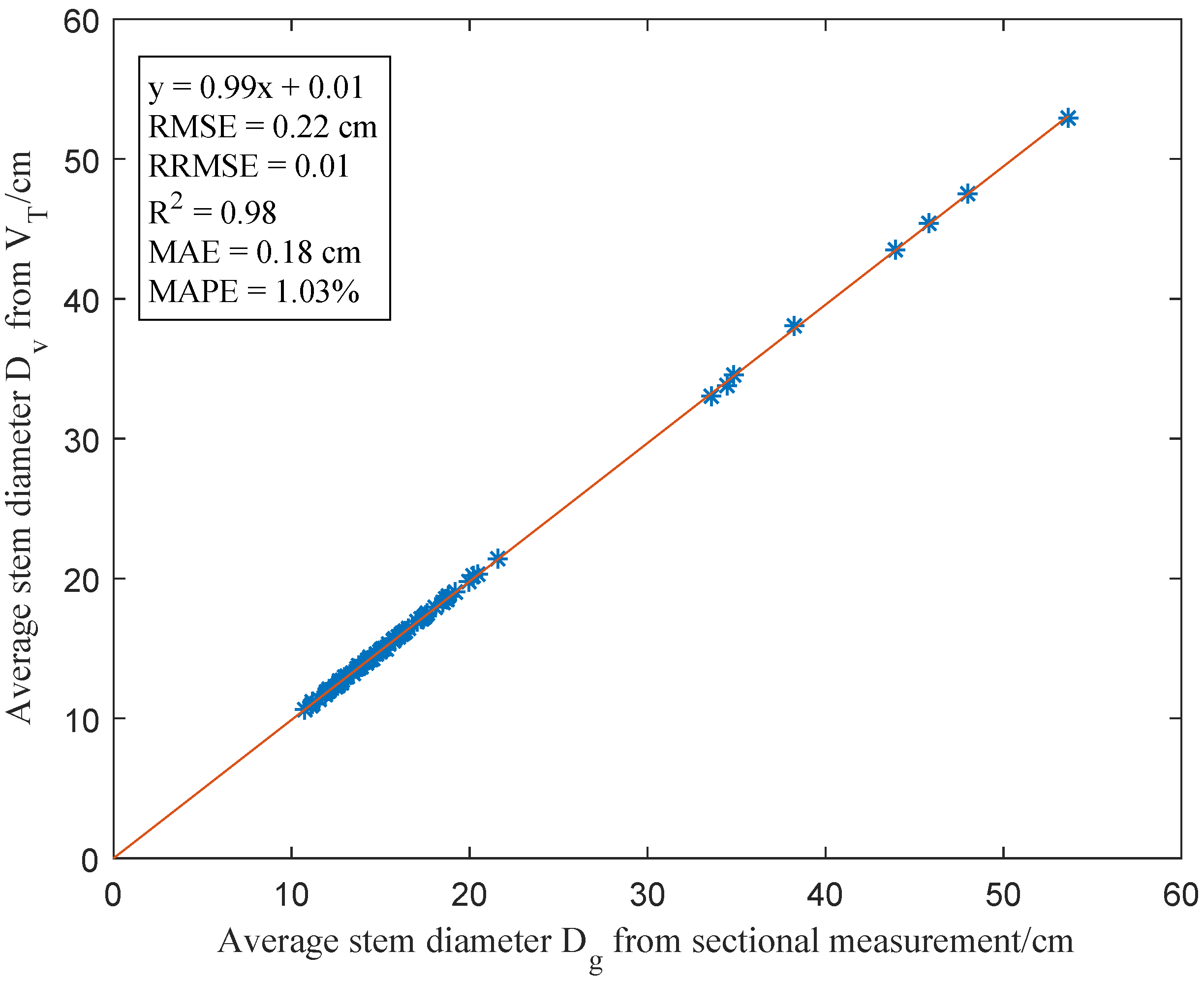
4.5. Numerical Results
5. Discussion
5.1. The Complexity of Stem Surface Reconstruction
5.2. The Accuracy of the Stem Segment Volume Using the Tetrahedron Model
5.3. The Importance of the Quality of the Stem Point Cloud
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Abegg, M.; Bösch, R.; Kükenbrink, D.; Morsdorf, F. Tree volume estimation with terrestrial laser scanning—Testing for bias in a 3D virtual environment. Agric. For. Meteorol. 2023, 331, 109348. [Google Scholar] [CrossRef]
- Yusup, A.; Halik, Ü.; Keyimu, M.; Aishan, T.; Abliz, A.; Dilixiati, B.; Wei, J. Trunk volume estimation of irregular shaped Populus euphratica riparian forest using TLS point cloud data and multivariate prediction models. For. Ecosyst. 2023, 10, 100082. [Google Scholar] [CrossRef]
- An, Z.; Froese, R.E. Tree stem volume estimation from terrestrial LiDAR point cloud by unwrapping. Can. J. For. Res. 2023, 53, 60–70. [Google Scholar] [CrossRef]
- Demol, M.; Verbeeck, H.; Gielen, B.; Armston, J.; Burt, A.; Disney, M.; Duncanson, L.; Hackenberg, J.; Kükenbrink, D.; Lau, A.; et al. Estimating forest above-ground biomass with terrestrial laser scanning: Current status and future directions. Methods Ecol. Evol. 2022, 13, 1628–1639. [Google Scholar] [CrossRef]
- West, P.W. Tree and Forest Measurement; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Xianyu, M. Forest Measuration; China Forestry Publishing House: BeiJing, China, 2006. [Google Scholar]
- Van Laar, A.; Akca, A. Forest Mensuration; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007; Volume 13. [Google Scholar]
- Leäo, F.M.; Nascimento, R.G.M.; Emmert, F.; Santos, G.G.A.; Caldeira, N.A.M.; Miranda, I.S. How many trees are necessary to fit an accurate volume model for the Amazon forest? A site-dependent analysis. For. Ecol. Manag. 2021, 480, 118652. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrën, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; et al. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppä, J.; Kaartinen, H.; Lehtomäki, M.; Pyörälä, J.; Pfeifer, N.; Holopainen, M.; Brolly, G.; Francesco, P.; Hackenberg, J.; et al. International benchmarking of terrestrial laser scanning approaches for forest inventories. ISPRS J. Photogramm. Remote Sens. 2018, 144, 137–179. [Google Scholar] [CrossRef]
- Calders, K.; Adams, J.; Armston, J.; Bartholomeus, H.; Bauwens, S.; Bentley, L.P.; Chave, J.; Danson, F.M.; Demol, M.; Disney, M.; et al. Terrestrial laser scanning in forest ecology: Expanding the horizon. Remote Sens. Environ. 2020, 251, 112102. [Google Scholar] [CrossRef]
- Cabo, C.; Ordóñez, C.; López-Sánchez, C.A.; Armesto, J. Automatic dendrometry: Tree detection, tree height and diameter estimation using terrestrial laser scanning. Int. J. Appl. Earth Obs. Geoinf. 2018, 69, 164–174. [Google Scholar] [CrossRef]
- Michałowska, M.; Rapiński, J.; Janicka, J. Tree position estimation from TLS data using hough transform and robust least-squares circle fitting. Remote Sens. Appl. Soc. Environ. 2023, 29, 100863. [Google Scholar] [CrossRef]
- Pitkänen, T.P.; Raumonen, P.; Kangas, A. Measuring stem diameters with TLS in boreal forests by complementary fitting procedure. ISPRS J. Photogramm. Remote Sens. 2019, 147, 294–306. [Google Scholar] [CrossRef]
- Ravaglia, J.; Fournier, R.A.; Bac, A.; Véga, C.; Côté, J.F.; Piboule, A.; Rémillard, U. Comparison of Three Algorithms to Estimate Tree Stem Diameter from Terrestrial Laser Scanner Data. Forests 2019, 10, 599. [Google Scholar] [CrossRef]
- You, L.; Wei, J.; Liang, X.; Lou, M.; Pang, Y.; Song, X. Comparison of Numerical Calculation Methods for Stem Diameter Retrieval Using Terrestrial Laser Data. Remote Sens. 2021, 13, 1780. [Google Scholar] [CrossRef]
- Srinivasan, S.; Popescu, S.C.; Eriksson, M.; Sheridan, R.D.; Ku, N.W. Terrestrial Laser Scanning as an Effective Tool to Retrieve Tree Level Height, Crown Width, and Stem Diameter. Remote Sens. 2015, 7, 1877–1896. [Google Scholar] [CrossRef]
- Sun, J.; Wang, P.; Li, R.; Zhou, M.; Wu, Y. Fast Tree Skeleton Extraction Using Voxel Thinning Based on Tree Point Cloud. Remote Sens. 2022, 14, 2558. [Google Scholar] [CrossRef]
- Xu, Y.; Hu, C.; Xie, Y. An improved space colonization algorithm with DBSCAN clustering for a single tree skeleton extraction. Int. J. Remote Sens. 2022, 43, 3692–3713. [Google Scholar] [CrossRef]
- Panagiotidis, D.; Abdollahnejad, A. Accuracy Assessment of Total Stem Volume Using Close-Range Sensing: Advances in Precision Forestry. Forests 2021, 12, 717. [Google Scholar] [CrossRef]
- Ninni Saarinen, V.K.; Vastaranta, M.; Luoma, V.; Pyörälä, J.; Tanhuanpää, T.; Liang, X.; Kaartinen, H.; Kukko, A.; Jaakkola, A.; Yu, X.; et al. Feasibility of Terrestrial laser scanning for collecting stem volume information from single trees. ISPRS J. Photogramm. Remote Sens. 2017, 123, 140–158. [Google Scholar] [CrossRef]
- Calders, K.; Newnham, G.; Burt, A.; Murphy, S.; Raumonen, P.; Herold, M.; Culvenor, D.; Avitabile, V.; Disney, M.; Armston, J.; et al. Nondestructive estimates of above-ground biomass using terrestrial laser scanning. Methods Ecol. Evol. 2015, 6, 198–208. [Google Scholar] [CrossRef]
- Brede, B.; Calders, K.; Lau, A.; Raumonen, P.; Bartholomeus, H.M.; Herold, M.; Kooistra, L. Non-destructive tree volume estimation through quantitative structure modelling: Comparing UAV laser scanning with terrestrial LIDAR. Remote Sens. Environ. 2019, 233, 111355. [Google Scholar] [CrossRef]
- Brede, B.; Terryn, L.; Barbier, N.; Bartholomeus, H.M.; Bartolo, R.; Calders, K.; Derroire, G.; Krishna Moorthy, S.M.; Lau, A.; Levick, S.R.; et al. Non-destructive estimation of individual tree biomass: Allometric models, terrestrial and UAV laser scanning. Remote Sens. Environ. 2022, 280, 113180. [Google Scholar] [CrossRef]
- Raumonen, P.; Kaasalainen, M.; Åkerblom, M.; Kaasalainen, S.; Kaartinen, H.; Vastaranta, M.; Holopainen, M.; Disney, M.; Lewis, P. Fast Automatic Precision Tree Models from Terrestrial Laser Scanner Data. Remote Sens. 2013, 5, 491. [Google Scholar] [CrossRef]
- Fan, G.; Nan, L.; Dong, Y.; Su, X.; Chen, F. AdQSM: A New Method for Estimating Above-Ground Biomass from TLS Point Clouds. Remote Sens. 2020, 12, 3089. [Google Scholar] [CrossRef]
- Nölke, N.; Fehrmann, L.; I Nengah, S.; Tiryana, T.; Seidel, D.; Kleinn, C. On the geometry and allometry of big-buttressed trees-a challenge for forest monitoring: New insights from 3D-modeling with terrestrial laser scanning. IForest-Biogeosci. For. 2015, 8, 574. [Google Scholar] [CrossRef]
- Hess, C.; Bienert, A.; Härdtle, W.; Von Oheimb, G. Does Tree Architectural Complexity Influence the Accuracy of Wood Volume Estimates of Single Young Trees by Terrestrial Laser Scanning? Forests 2015, 6, 3847–3867. [Google Scholar] [CrossRef]
- Bienert, A.; Hess, C.; Maas, H.G.; Von Oheimb, G. A voxel-based technique to estimate the volume of trees from terrestrial laser scanner data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 40, 101–106. [Google Scholar] [CrossRef]
- Pitkänen, T.P.; Raumonen, P.; Liang, X.; Lehtomäki, M.; Kangas, A. Improving TLS-based stem volume estimates by field measurements. Comput. Electron. Agric. 2021, 180, 105882. [Google Scholar] [CrossRef]
- Liu, L.; Pan, g.Y.; Li, Z. Individual Tree DBH and Height Estimation Using Terrestrial Laser Scanning (TLS) in A Subtropical Forest. Sci. Silvae Sin. 2016, 52, 26–37. [Google Scholar] [CrossRef]
- Si, H. TetGen, a Delaunay-Based Quality Tetrahedral Mesh Generator. ACM Trans. Math. Softw. 2015, 41, 11. [Google Scholar] [CrossRef]
- You, L.; Tang, S.; Song, X.; Lei, Y.; Zang, H.; Lou, M.; Zhuang, C. Precise Measurement of Stem Diameter by Simulating the Path of Diameter Tape from Terrestrial Laser Scanning Data. Remote Sens. 2016, 8, 717. [Google Scholar] [CrossRef]
- Maus, A. Delaunay Triangulation and the Convex Hull Of n Points in Expected Linear Time. BIT 1984, 24, 151–163. [Google Scholar] [CrossRef]
- You, L.; Tang, S.; Song, X. Growth algorithm centered on priority point for constructing the Delaunay triangulation. J. Image Graph. 2016, 21, 60–68. [Google Scholar]
- Rusu, R.B.; Cousins, S. 3D is here: Point cloud library (pcl). In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 1–4. [Google Scholar]
- Carr, J.C.; Beatson, R.K.; Cherrie, J.B.; Mitchell, T.J.; Fright, W.R.; McCallum, B.C.; Evans, T.R. Reconstruction and representation of 3D objects with radial basis functions. In Proceedings of the 28th Annual Conference on Computer Graphics and Interactive Techniques 2001, Los Angeles, CA, USA, 12–17 August 2001; pp. 67–76. [Google Scholar]
- Koreň, M.; Hunčaga, M.; Chudá, J.; Mokroš, M.; Surový, P. The Influence of Cross-Section Thickness on Diameter at Breast Height Estimation from Point Cloud. ISPRS Int. J. Geo-Inf. 2020, 9, 495. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Iterations | HD/cm | Number of Triangles | Number of Tetrahedron | /cm3 | /cm3 |
|---|---|---|---|---|---|
| 0 | 1.03 | 1666 | 3029 | 16,143.10 | 16,335.00 |
| 1 | 1.03 | 2594 | 4699 | 16,158.20 | |
| 2 | 1.90 | 4364 | 7667 | 16,175.10 | |
| 3 | 1.90 | 7142 | 12,222 | 16,188.10 | |
| 4 | 1.95 | 11,614 | 19,262 | 16,203.40 | |
| 5 | 1.97 | 18,434 | 29,974 | 16,216.10 |
| h/cm | / | Number of Iterations | HD/cm | Number of Triangles | Number of Tetrahedrons | /cm3 | /cm3 |
|---|---|---|---|---|---|---|---|
| 3 | 15 | 4 | 1.91 | 26,378 | 41,770 | 16,223.23 | 16,335.16 |
| 20 | 5 | 1.90 | 46,688 | 72,719 | 16,233.17 | ||
| 5 | 15 | 5 | 1.97 | 18,434 | 29,974 | 16,216.15 | |
| 20 | 4 | 1.91 | 10,188 | 16,866 | 16,154.63 | ||
| 8 | 20 | 7 | 1.98 | 20,092 | 32,647 | 16,197.66 | |
| 25 | 7 | 1.99 | 19,392 | 31,111 | 16,134.63 |
| /cm | /cm | /cm3 | HD/cm | Number of Triangles | Number of Tetrahedrons | /cm3 | /cm3 | |
|---|---|---|---|---|---|---|---|---|
| Min | 10.74 | 0.34 | 9054.37 | 0.84 | 3226 | 5674 | 8866.74 | −39.43 |
| Max | 53.64 | 8.69 | 226,540.14 | 2.00 | 191,349 | 294,130 | 220,009.00 | 6531.14 |
| Avg | 18.00 | 1.61 | 31,523.45 | 1.87 | 30,047 | 47,249 | 30,865.31 | 655.12 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
You, L.; Chang, X.; Sun, Y.; Pang, Y.; Feng, Y.; Song, X. Volume Estimation of Stem Segments Based on a Tetrahedron Model Using Terrestrial Laser Scanning Data. Remote Sens. 2023, 15, 5060. https://doi.org/10.3390/rs15205060
You L, Chang X, Sun Y, Pang Y, Feng Y, Song X. Volume Estimation of Stem Segments Based on a Tetrahedron Model Using Terrestrial Laser Scanning Data. Remote Sensing. 2023; 15(20):5060. https://doi.org/10.3390/rs15205060
Chicago/Turabian StyleYou, Lei, Xiaosa Chang, Yian Sun, Yong Pang, Yan Feng, and Xinyu Song. 2023. "Volume Estimation of Stem Segments Based on a Tetrahedron Model Using Terrestrial Laser Scanning Data" Remote Sensing 15, no. 20: 5060. https://doi.org/10.3390/rs15205060
APA StyleYou, L., Chang, X., Sun, Y., Pang, Y., Feng, Y., & Song, X. (2023). Volume Estimation of Stem Segments Based on a Tetrahedron Model Using Terrestrial Laser Scanning Data. Remote Sensing, 15(20), 5060. https://doi.org/10.3390/rs15205060