


Mapping of Rubber Forest Growth Models Based on Point Cloud Data

Abstract
:1. Introduction
2. Materials and Methods
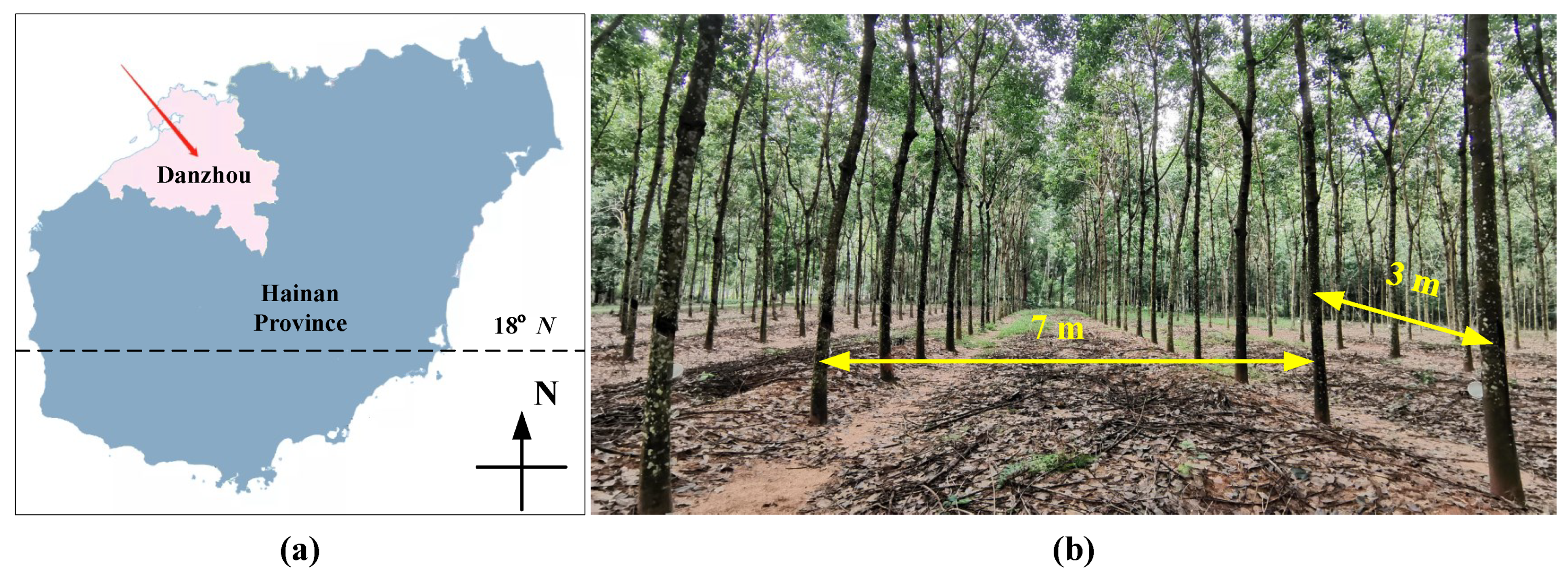
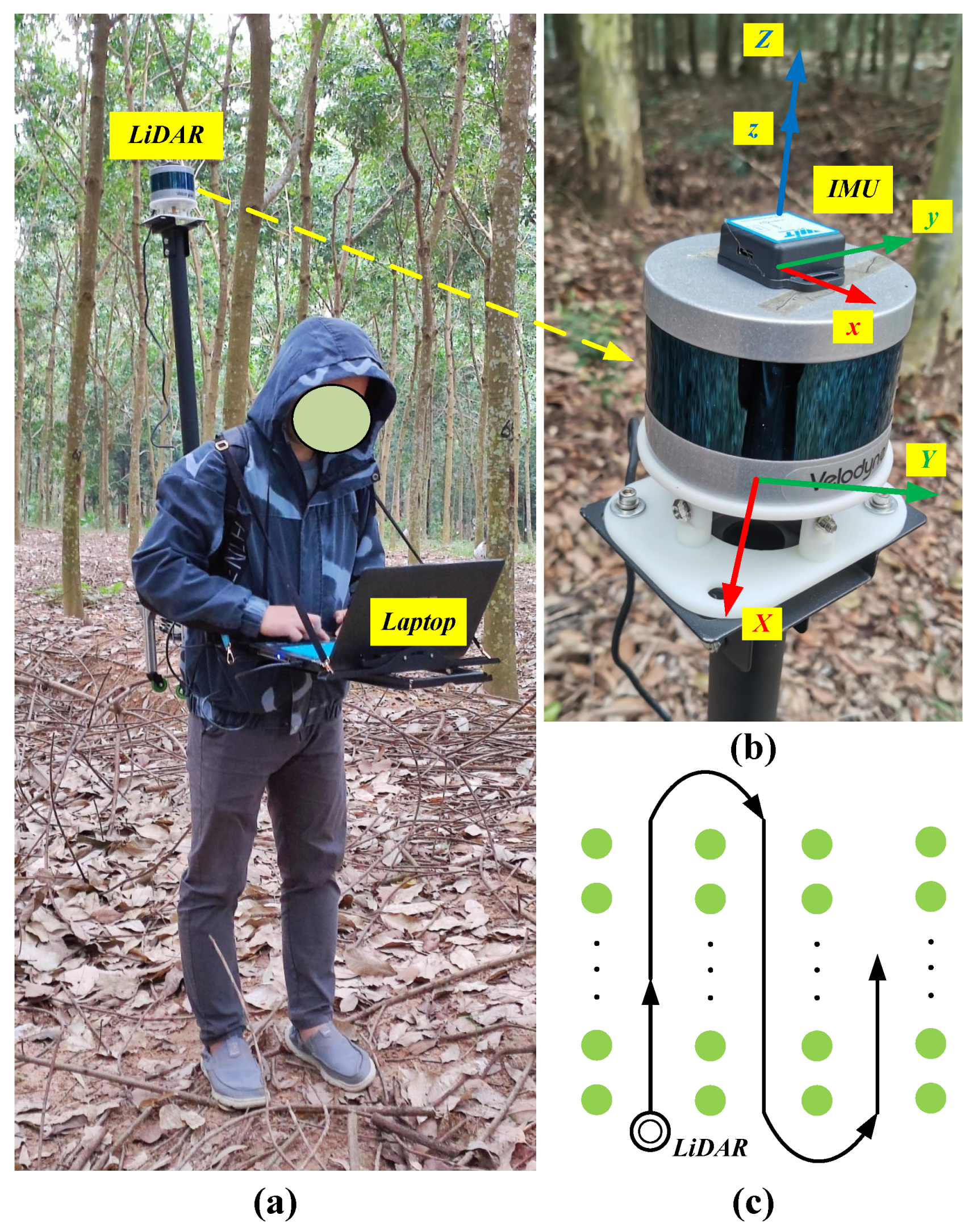
2.1. Collection of Point Clouds
2.2. Object Detection Algorithms
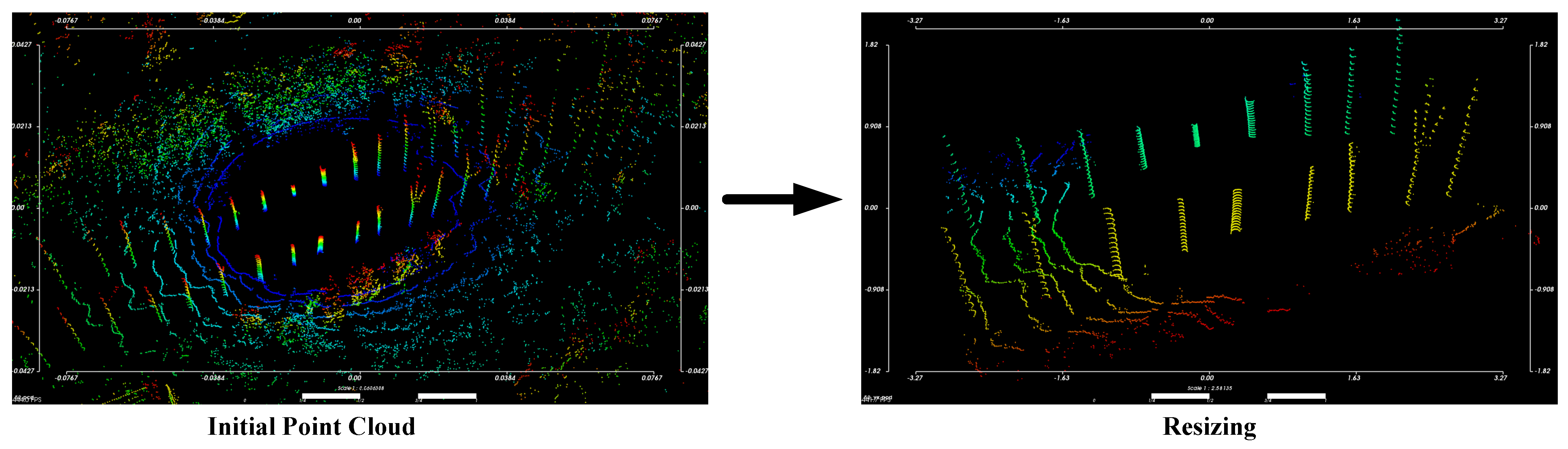
2.2.1. Data Organization
2.2.2. Data Augmentation
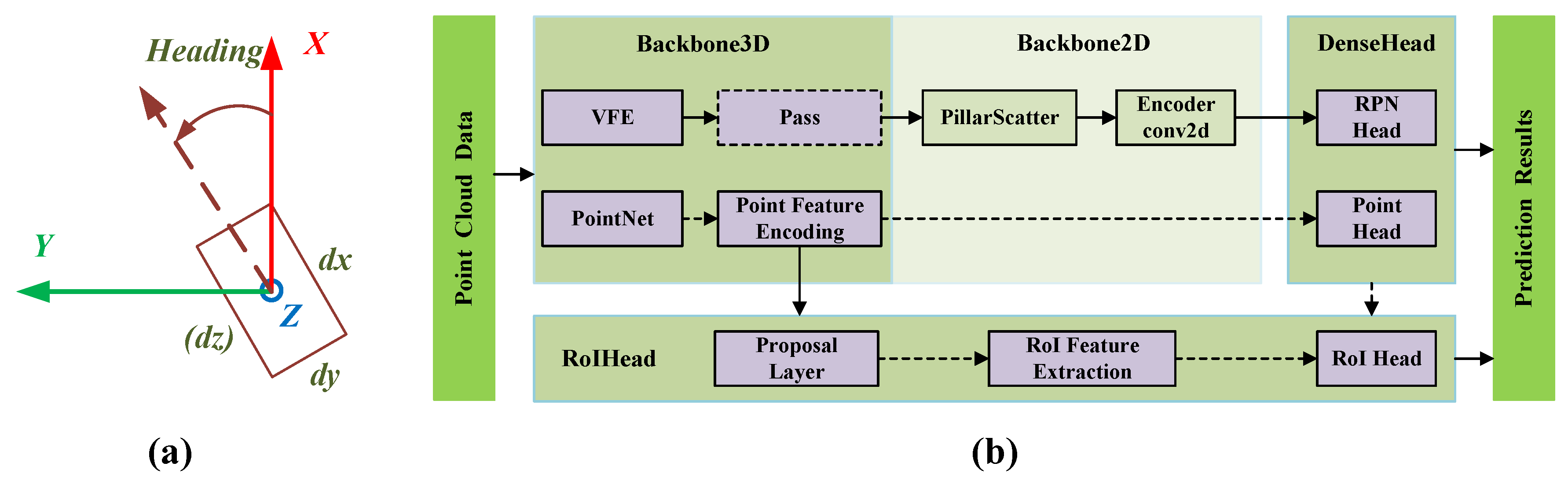
2.2.3. Algorithm Improvement and Training
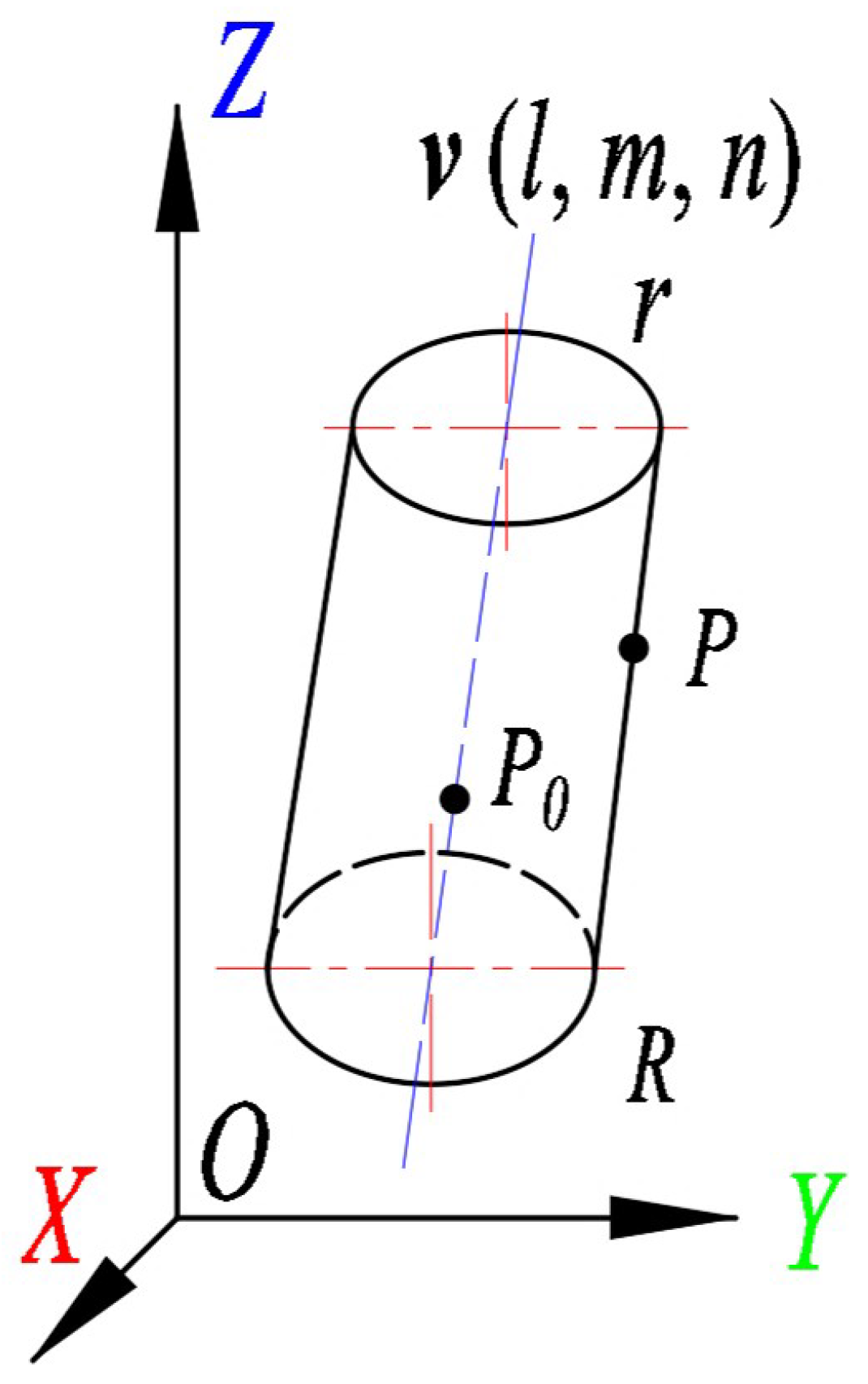
2.3. Trunk Modelling
2.3.1. RANSAC Cylinder Fitting
2.3.2. IRTLS Cylinder Fitting
2.4. Performance Evaluation
3. Results
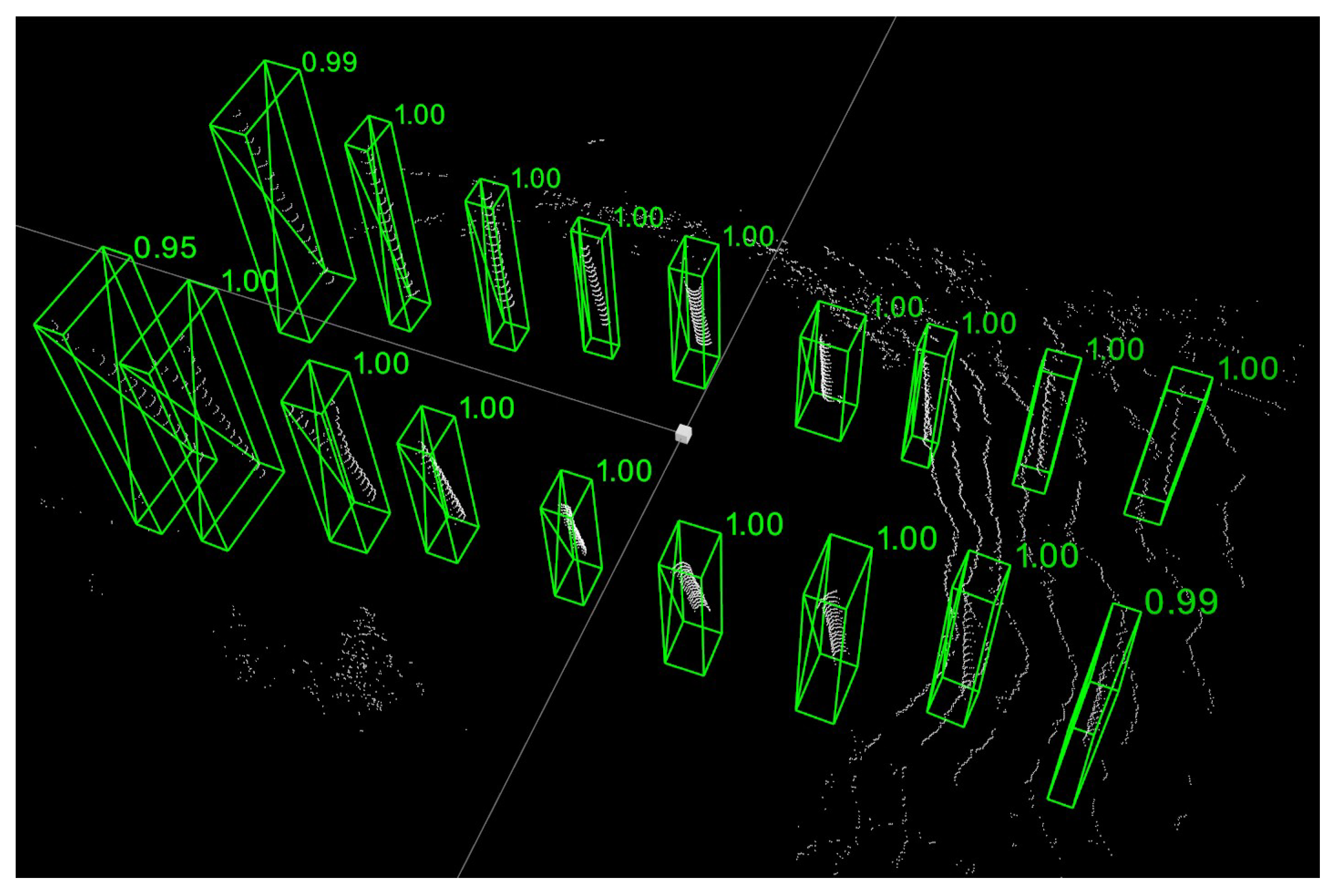
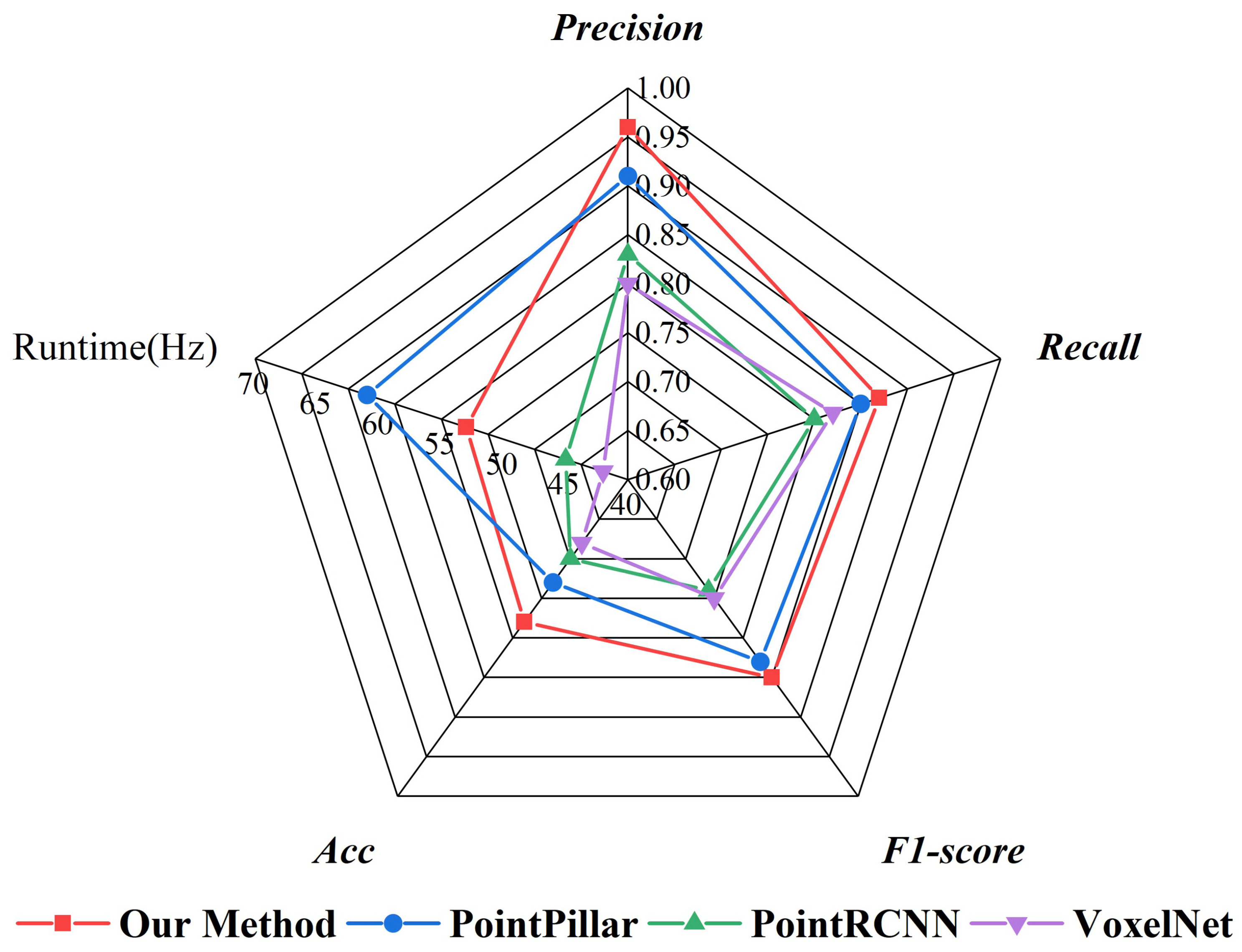
3.1. Accuracy Assessment of Trunk Target Detection
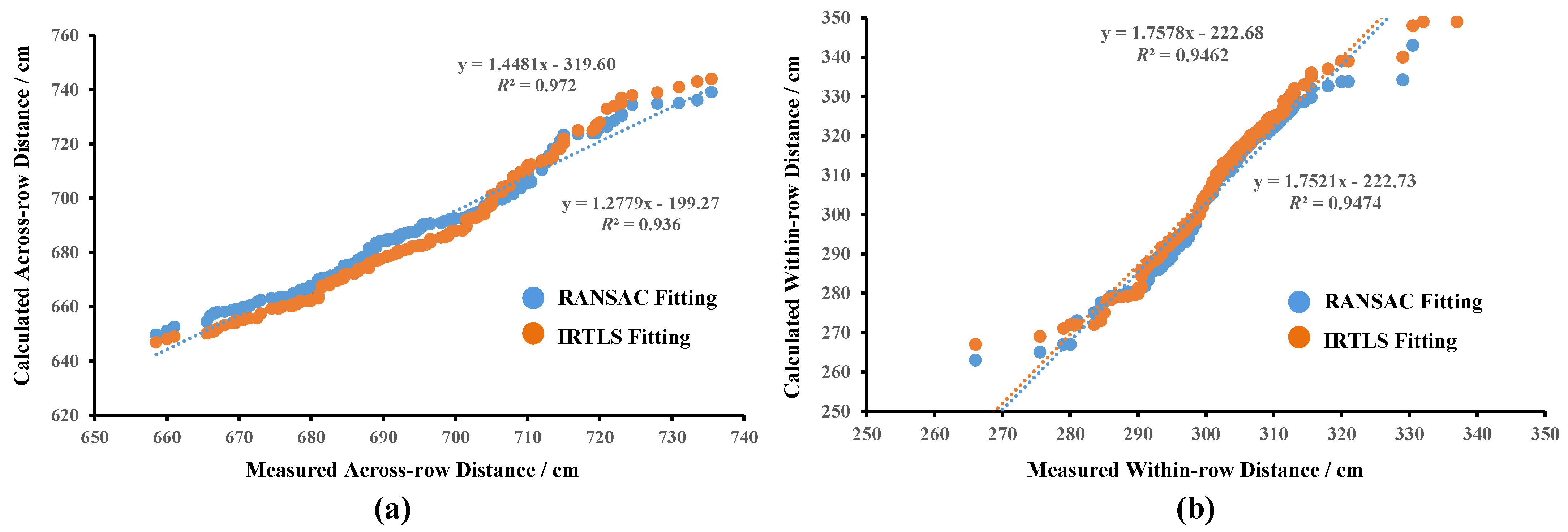
3.2. Accuracy Assessment of Trunk Modelling
3.3. Remote Sensing Map of Rubber Forests
4. Discussions
4.1. Scalability and Limitations of the Backpack Point Cloud Acquisition System
4.2. Construction of the Target Detection Framework
4.3. Comparison of Trunk Fitting Methods
4.4. Map Creation for Trunk Growth Modelling
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Haboudane, D.; Miller, J.R.; Tremblay, N.; Zarco-Tejada, P.J.; Dextraze, L. Integrated narrow-band vegetation indices for prediction of crop chlorophyll content for application to precision agriculture. Remote Sens. Environ. 2002, 81, 416–426. [Google Scholar] [CrossRef]
- Corwin, D.L.; Lesch, S.M. Application of Soil Electrical Conductivity to Precision Agriculture. Agron. J. 2003, 95, 455–471. [Google Scholar]
- Mulla, D.J. Twenty five years of remote sensing in precision agriculture: Key advances and remaining knowledge gaps. Biosyst. Eng. 2013, 114, 358–371. [Google Scholar] [CrossRef]
- Li, D.; Fan, S.; He, A.; Yin, F. Forest resources and environment in China. J. For. Res. 2005, 9, 307–312. [Google Scholar] [CrossRef]
- Tang, L.; Shao, G. Drone remote sensing for forestry research and practices. J. For. Res. 2015, 26, 791–797. [Google Scholar] [CrossRef]
- LaRue, E.A.; Wagner, F.W.; Fei, S.; Atkins, J.W.; Fahey, R.T.; Gough, C.M.; Hardiman, B.S. Compatibility of Aerial and Terrestrial LiDAR for Quantifying Forest Structural Diversity. Remote Sens. 2020, 12, 1407. [Google Scholar] [CrossRef]
- Mercker, D. Precision Forestry. Ala. Treasured For. 2005, 2, 24. [Google Scholar]
- Senganimalunje, T.C.; Chirwa, P.W.; Babalola, F.D. Potential of institutional arrangements for sustainable management of forests under co-management with local forest organisations in Mua-Livulezi Forest Reserve, Mtakataka, Malawi. Int. For. Rev. 2015, 17, 340–354. [Google Scholar] [CrossRef]
- Zhou, H.; Zhang, S.; Zhang, J.; Zhang, C.; Wang, S.; Zhai, Y.; Li, W. Design, development, and field evaluation of a rubber tapping robot. J. Field Robot. 2022, 39, 28–54. [Google Scholar] [CrossRef]
- Zhou, H.; Gao, J.; Zhang, F.; Zhang, J.; Wang, S.; Zhang, C.; Li, W. Evaluation of Cutting Stability of a Natural-Rubber-Tapping Robot. Agriculture 2023, 13, 583. [Google Scholar] [CrossRef]
- Zhou, H.; Zhang, J.; Ge, L.; Yu, X.; Wang, Y.; Zhang, C. Research on volume prediction of single tree canopy based on three-dimensional (3D) LiDAR and clustering segmentation. Int. J. Remote Sens. 2021, 42, 738–755. [Google Scholar] [CrossRef]
- Thiel, C.; Schmullius, C. Comparison of UAV photograph-based and airborne lidar-based point clouds over forest from a forestry application perspective. Int. J. Remote Sens. 2017, 38, 2411–2426. [Google Scholar] [CrossRef]
- Zald, H.S.J.; Wulder, M.A.; White, J.C.; Hilker, T.; Hermosilla, T.; Hobart, G.W.; Coops, N.C. Integrating Landsat pixel composites and change metrics with lidar plots to predictively map forest structure and aboveground biomass in Saskatchewan, Canada. Remote Sens. Environ. 2016, 176, 188–201. [Google Scholar] [CrossRef]
- Atkins, J.W.; Bhatt, P.; Carrasco, L.; Francis, E.; Garabedian, J.E.; Hakkenberg, C.R.; Hardiman, B.S.; Jung, J.; Koirala, A.; LaRue, E.A.; et al. Integrating Forest Structural Diversity Measurement into Ecological Research. Ecosphere 2023, 14, e4633. [Google Scholar] [CrossRef]
- Kang, J.; Wang, L.; Jia, K.; Niu, Z.; Shakir, M.; Qiao, H.; Zhao, X. Identifying crown areas in an undulating area planted with eucalyptus using unmanned aerial vehicle near-infrared imagery. Remote Sens. Lett. 2016, 7, 561–570. [Google Scholar] [CrossRef]
- Jeronimo, S.M.; Kane, V.R.; Churchill, D.J.; McGaughey, R.J.; Franklin, J.F. Applying LiDAR Individual Tree Detection to Management of Structurally Diverse Forest Landscapes. J. For. 2018, 116, 336–346. [Google Scholar] [CrossRef]
- Einzmann, K.; Immitzer, M.; Böck, S.; Bauer, O.; Schmitt, A.; Atzberger, C. Windthrow Detection in European Forests with Very High-Resolution Optical Data. Forests 2017, 8, 21. [Google Scholar] [CrossRef]
- Xia, K.; Li, C.; Yang, Y.; Deng, S.; Feng, H. Study on Single-Tree Extraction Method for Complex RGB Point Cloud Scenes. Remote Sens. 2023, 15, 2644. [Google Scholar] [CrossRef]
- Wielgosz, M.; Puliti, S.; Wilkes, P.; Astrup, R. Point2Tree(P2T)—Framework for Parameter Tuning of Semantic and Instance Segmentation Used with Mobile Laser Scanning Data in Coniferous Forest. Remote Sens. 2023, 15, 3737. [Google Scholar] [CrossRef]
- Eysn, L.; Hollaus, M.; Lindberg, E.; Berger, F.; Monnet, J.-M.; Dalponte, M.; Kobal, M.; Pellegrini, M.; Lingua, E.; Mongus, D.; et al. A Benchmark of Lidar-Based Single Tree Detection Methods Using Heterogeneous Forest Data from the Alpine Space. Forests 2015, 6, 1721–1747. [Google Scholar] [CrossRef]
- Geiger, A.; Lenz, P.; Stiller, C.; Urtasun, R. Vision meets robotics: The KITTI dataset. Int. J. Robot. Res. 2013, 32, 1231–1237. [Google Scholar] [CrossRef]
- Ding, P.; Wang, Z. 3D LiDAR point cloud loop detection based on dynamic object removal. In Proceedings of the 2021 IEEE International Conference on Real-time Computing and Robotics (RCAR), Xining, China, 15–19 July 2021; pp. 980–985. [Google Scholar]
- Wang, J.; Fan, J.; Xue, J.; Bai, X.; Diao, J. Lidar Point Cloud Object Detection and Semantic Segmentation Fusion Based on Bird’s-Eye-View. In Proceedings of the 2022 6th CAA International Conference on Vehicular Control and Intelligence (CVCI), Nanjing, China, 28–30 October 2022; pp. 1–6. [Google Scholar]
- Zhang, L.; Meng, H.; Yan, Y.; Xu, X. Transformer-Based Global PointPillars 3D Object Detection Method. Electronics 2023, 12, 3092. [Google Scholar] [CrossRef]
- Stanisz, J.; Lis, K.; Gorgon, M. Implementation of the pointpillars network for 3D object detection in reprogrammable heterogeneous devices using FINN. J. Signal Process. Syst. 2022, 94, 659–674. [Google Scholar] [CrossRef]
- Gao, S.H.; Cheng, M.M.; Zhao, K.; Zhang, X.Y.; Yang, M.H.; Torr, P. Res2Net: A New Multi-Scale Backbone Architecture. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 2, 652–662. [Google Scholar] [CrossRef]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin transformer: Hierarchical vision transformer using shifted windows. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, QC, Canada, 10–17 October 2021; pp. 10012–10022. [Google Scholar]
- Han, K.; Xiao, A.; Wu, E.; Guo, J.; Xu, C.; Wang, Y. Transformer in transformer. Adv. Neural Inf. Process. Syst. 2021, 34, 15908–15919. [Google Scholar]
- Chen, X.L.; Zhao, J.; Chen, S.Y. Lightweight semantic segmentation network based on attention coding. Laser Optoelectron. Prog. 2021, 58, 1410012. [Google Scholar]
- Choi, S.; Kim, T.; Yu, W. Performance evaluation of RANSAC family. J. Comput. Vis. 1997, 24, 271–300. [Google Scholar]
- Schnabel, R.; Wahl, R.; Klein, R. Efficient RANSAC for Point-Cloud Shape Detection. Comput. Graph. Forum 2007, 26, 214–226. [Google Scholar] [CrossRef]
- Nelder, J.A.; Mead, R. A simplex method for function minimization. Comput. J. 1965, 7, 308–313. [Google Scholar] [CrossRef]
- de Conto, T.; Olofsson, K.; Görgens, E.B.; Rodriguez, L.C.E.; Almeida, G. Performance of stem denoising and stem modelling algorithms on single tree point clouds from terrestrial laser scanning. Comput. Electron. Agric. 2017, 143, 165–176. [Google Scholar] [CrossRef]
- Liang, X.; Litkey, P.; Hyyppä, J.; Kaartinen, H.; Vastaranta, M.; Holopainen, M. Automatic stem mapping using single-scan terrestrial laser scanning. IEEE Trans. Geosci. Remote Sens. 2012, 50, 661–670. [Google Scholar] [CrossRef]
- Li, Z.; Wu, Y.; Peng, B.; Chen, X.; Sun, Z.; Liu, Y.; Paul, D. SeTransformer: A Transformer-Based Code Semantic Parser for Code Comment Generation. IEEE Trans. Reliab. 2023, 72, 258–273. [Google Scholar] [CrossRef]
- Yi, S.; Li, J.; Jiang, G.; Liu, X.; Chen, L. CTseg: A cascade composite transformer semantic segmentation network for UAV visual perception. Measurement 2023, 211, 112612. [Google Scholar] [CrossRef]
- Chen, D.; Yu, W.; Gao, Y. Lidar 3D Target Detection Based on Improved PointPillars. Laser Optoelectron. Prog. 2023, 60, 1028012. [Google Scholar]
- Zhang, J.; Xu, D.; Wang, J.; Li, Y. An Improved Detection Algorithm for Pre-processing Problem Based on PointPillars. In Proceedings of the 2021 14th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Shanghai, China, 23–25 October 2021; Volume 2021, pp. 1–6. [Google Scholar]
- Ma, Z.; Pang, Y.; Wang, D.; Liang, X.; Chen, B.; Lu, H.; Weinacker, H.; Koch, B. Individual Tree Crown Segmentation of a Larch Plantation Using Airborne Laser Scanning Data Based on Region Growing and Canopy Morphology Features. Remote Sens. 2020, 12, 1078. [Google Scholar] [CrossRef]
- Campos, J.; Llop, J.; Gallart, M.; García-Ruiz, F.; Gras, A.; Salcedo, R.; Gil, E. Development of canopy vigour maps using UAV for site-specific management during vineyard spraying process. Precis. Agric. 2019, 20, 1136–1156. [Google Scholar] [CrossRef]
- Esau, T.; Zaman, Q.U.; Groulx, D.; Chang, Y.K.; Schumann, A.W.; Havard, P. Supplementary Light Source Development for Camera-Based Smart Spraying in Low Light Conditions. Appl. Eng. Agric. 2017, 33, 5–14. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Parameter | Specification |
|---|---|---|
| LiDAR | 1 Measurement Range (m) | 100 |
| 2 Ranging Accuracy (mm) | ±30 | |
| 3 Field of View (Vertical) () | 30 (−15∼+15) | |
| 4 Angular Resolution (Vertical) () | 2.0 | |
| 5 Field of View (Horizontal) () | 360 | |
| 6 Angular Resolution (Horizontal) () | 0.1∼0.4 | |
| IMU | 1 Measurement Range () | (a) Angle of X/Z ± 180 |
| (b) Angle of Y ± 90 | ||
| 2 Repeatability () | 0.05 | |
| 3 Output Frequency (Hz) | 0.2∼50 | |
| 4 Transmission Distance (m) | 50 (Without Obstacles) |
| Parameter | Across-Row Distances | Within-Row Distances | ||
|---|---|---|---|---|
| RANSAC | IRTLS | RANSAC | IRTLS | |
| MAE/cm | 10.41 | 7.71 | 7.92 | 8.10 |
| R | 0.9360 | 0.9720 | 0.9474 | 0.9462 |
| RMSE/cm | 11.54 | 8.18 | 8.90 | 9.79 |
| Height | Parameter | RANSAC | IRTLS |
|---|---|---|---|
| 0.2 m | MAE/cm | 0.89 | 0.81 |
| R | 0.8430 | 0.9866 | |
| RMSE/cm | 1.25 | 1.14 | |
| 0.6 m | MAE/cm | 0.94 | 0.33 |
| R | 0.9011 | 0.9646 | |
| RMSE/cm | 1.00 | 0.51 | |
| 1.0 m | MAE/cm | 0.78 | 0.78 |
| R | 0.9593 | 0.9385 | |
| RMSE/cm | 0.86 | 0.90 | |
| 1.4 m | MAE/cm | 0.87 | 0.82 |
| R | 0.9312 | 0.9598 | |
| RMSE/cm | 0.94 | 0.84 | |
| 1.8 m | MAE/cm | 1.46 | 1.50 |
| R | 0.9068 | 0.9760 | |
| RMSE/cm | 1.52 | 1.56 | |
| 2.2 m | MAE/cm | 1.95 | 1.05 |
| R | 0.5693 | 0.8555 | |
| RMSE/cm | 2.02 | 1.12 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, H.; Zhang, G.; Zhang, J.; Zhang, C. Mapping of Rubber Forest Growth Models Based on Point Cloud Data. Remote Sens. 2023, 15, 5083. https://doi.org/10.3390/rs15215083
Zhou H, Zhang G, Zhang J, Zhang C. Mapping of Rubber Forest Growth Models Based on Point Cloud Data. Remote Sensing. 2023; 15(21):5083. https://doi.org/10.3390/rs15215083
Chicago/Turabian StyleZhou, Hang, Gan Zhang, Junxiong Zhang, and Chunlong Zhang. 2023. "Mapping of Rubber Forest Growth Models Based on Point Cloud Data" Remote Sensing 15, no. 21: 5083. https://doi.org/10.3390/rs15215083
APA StyleZhou, H., Zhang, G., Zhang, J., & Zhang, C. (2023). Mapping of Rubber Forest Growth Models Based on Point Cloud Data. Remote Sensing, 15(21), 5083. https://doi.org/10.3390/rs15215083