
Preliminary Assessment of BDS Radio Occultation Retrieval Quality and Coverage Using FY-3E GNOS II Measurements

 , ,
, ,  , , , , and add
Show full author list
, , , , and add
Show full author list
Abstract
:1. Introduction
2. Overview of FY-3 GNOS Missions
3. Datasets and Assessment Methods
3.1. GNOS RO and Reference Datasets
3.2. FY-3E GNOS II RO Data Assessment Methods
3.2.1. RO Event Numbers and Spatiotemporal Coverage
- (1)
- Time normalization to the period of interest through
3.2.2. Refractivity Profiles Retrieval Performance
3.2.3. Evaluation of Consistency with FY-3D GNOS RO Data
4. Results and Analysis
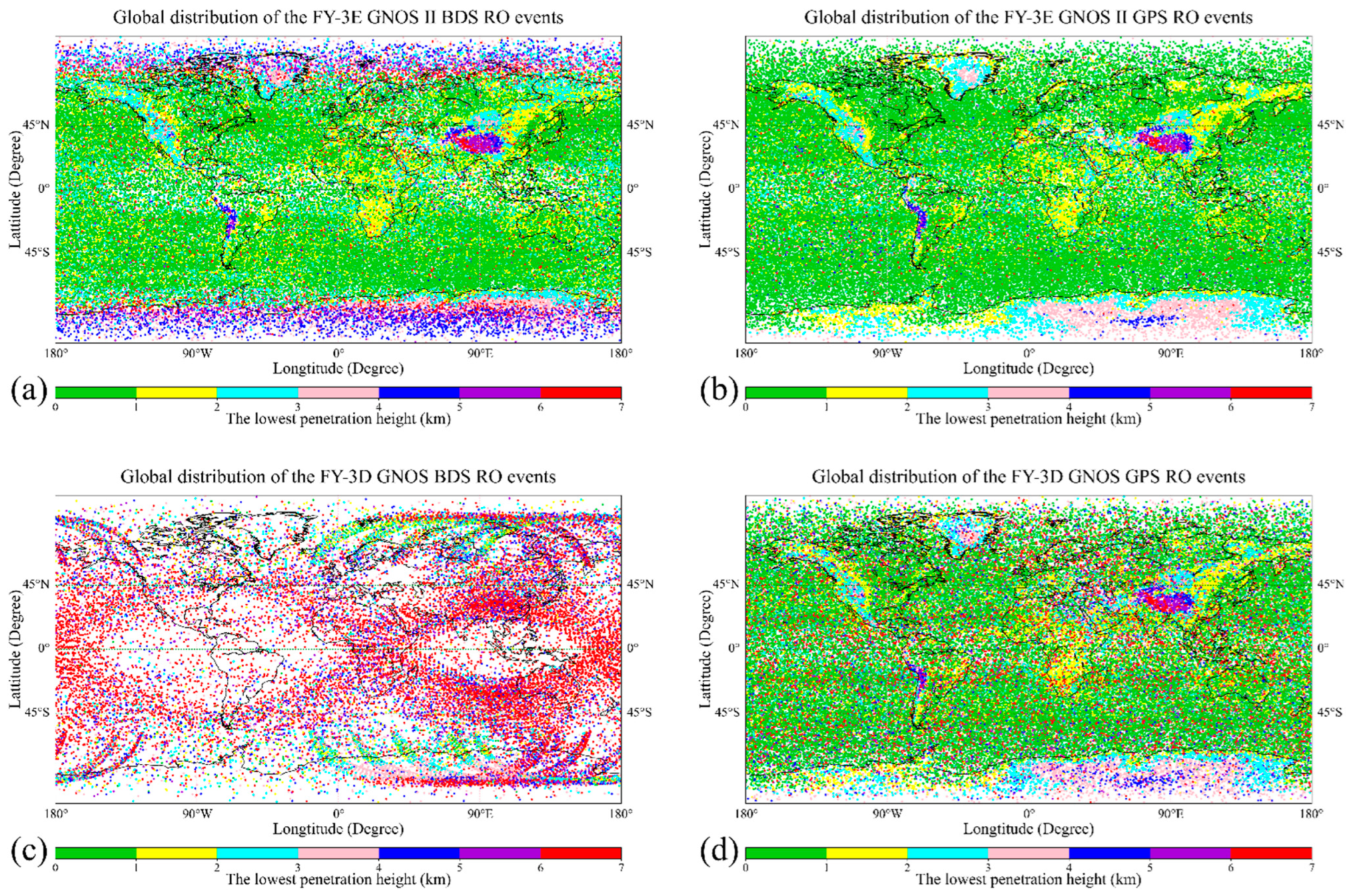
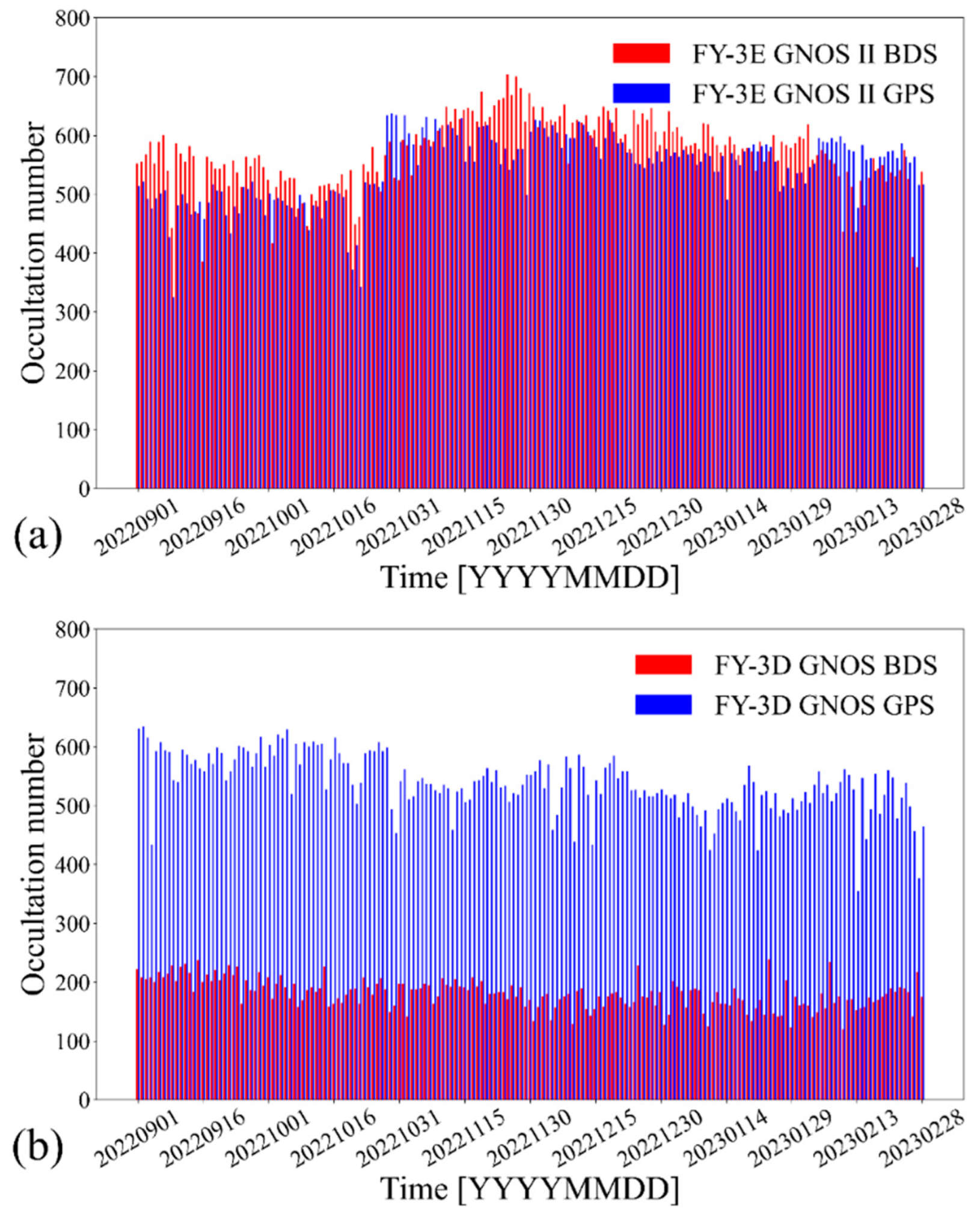
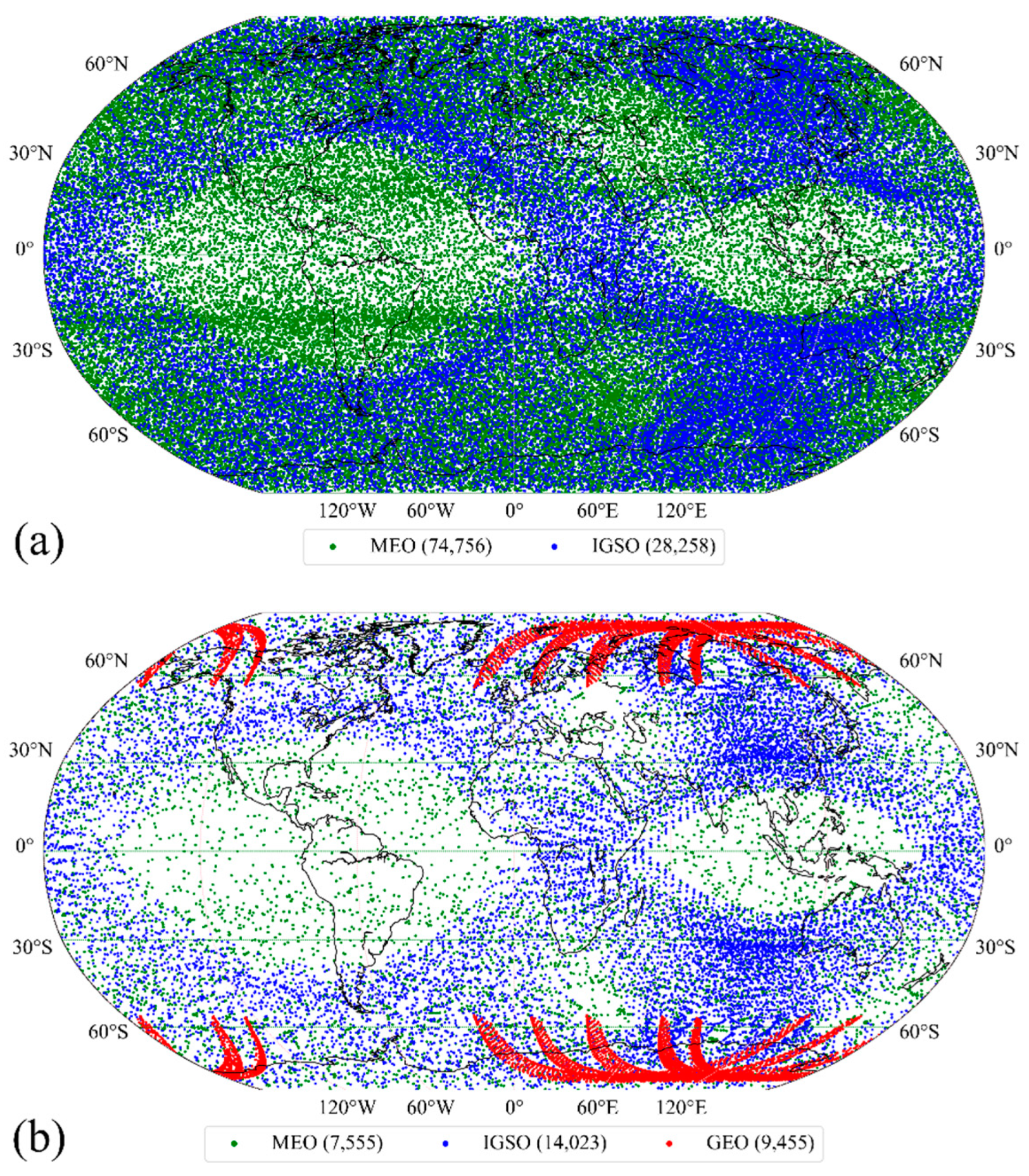
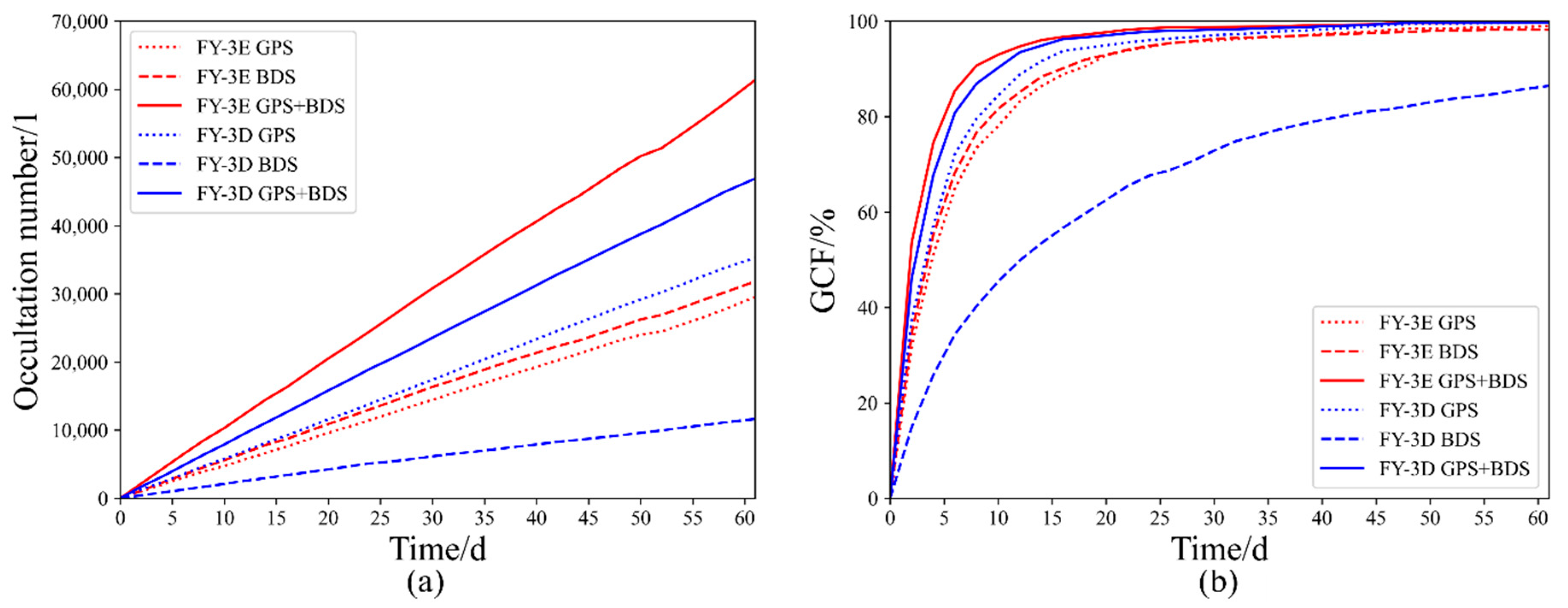
4.1. RO Event Numbers and Spatiotemporal Coverage
4.2. Refractivity Retrieval Performance and Evaluation of Consistency with FY-3D
5. Summary and Conclusions
- (1)
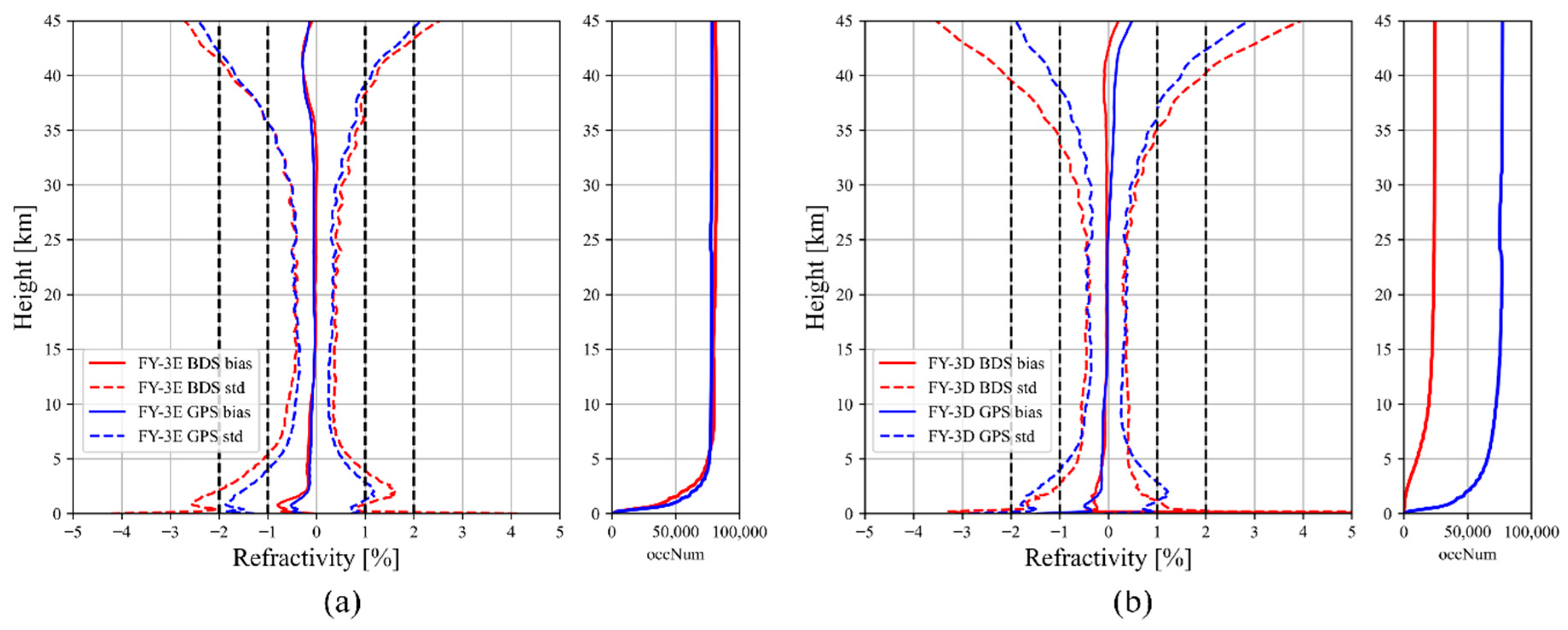
- Comparing with co-located NCEP FNL analysis data, the mean difference (and standard deviation) of the FY-3E GNOS II RO atmospheric refractivity retrievals is smaller than 0.2% (and 1%), in the upper troposphere and lower stratosphere, and remains consistent at this accuracy and precision level with the FY-3D GNOS RO data.
- (2)
- The RO event numbers and the spatiotemporal coverage of the FY-3E GNOS II GPS RO system is similar to the FY-3D GNOS GPS RO system, showing its basic reliability in this respect. Moreover, these characteristics are significantly enlarged and improved for the FY-3E GNOS II BDS RO system compared to the FY-3D GNOS BDS RO system, due to the on-top capacity to also use the BDS-3 system.
- (3)
- The penetration height toward the surface of the FY-3E GNOS II BDS RO profiles is deeper than that of FY-3D GNOS BDS RO profiles, due to the availability of improved open-loop data tracking and processing.
- (4)
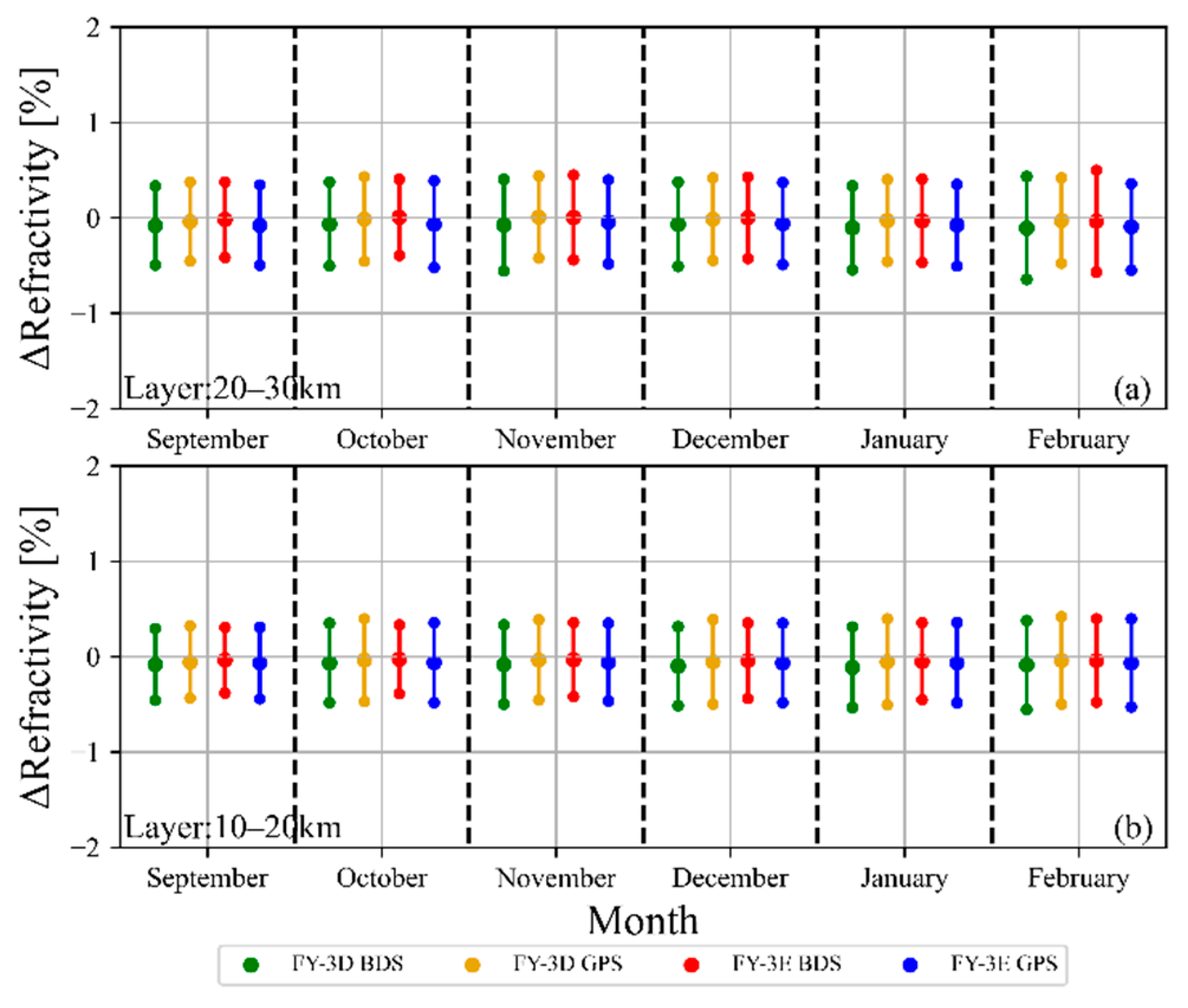
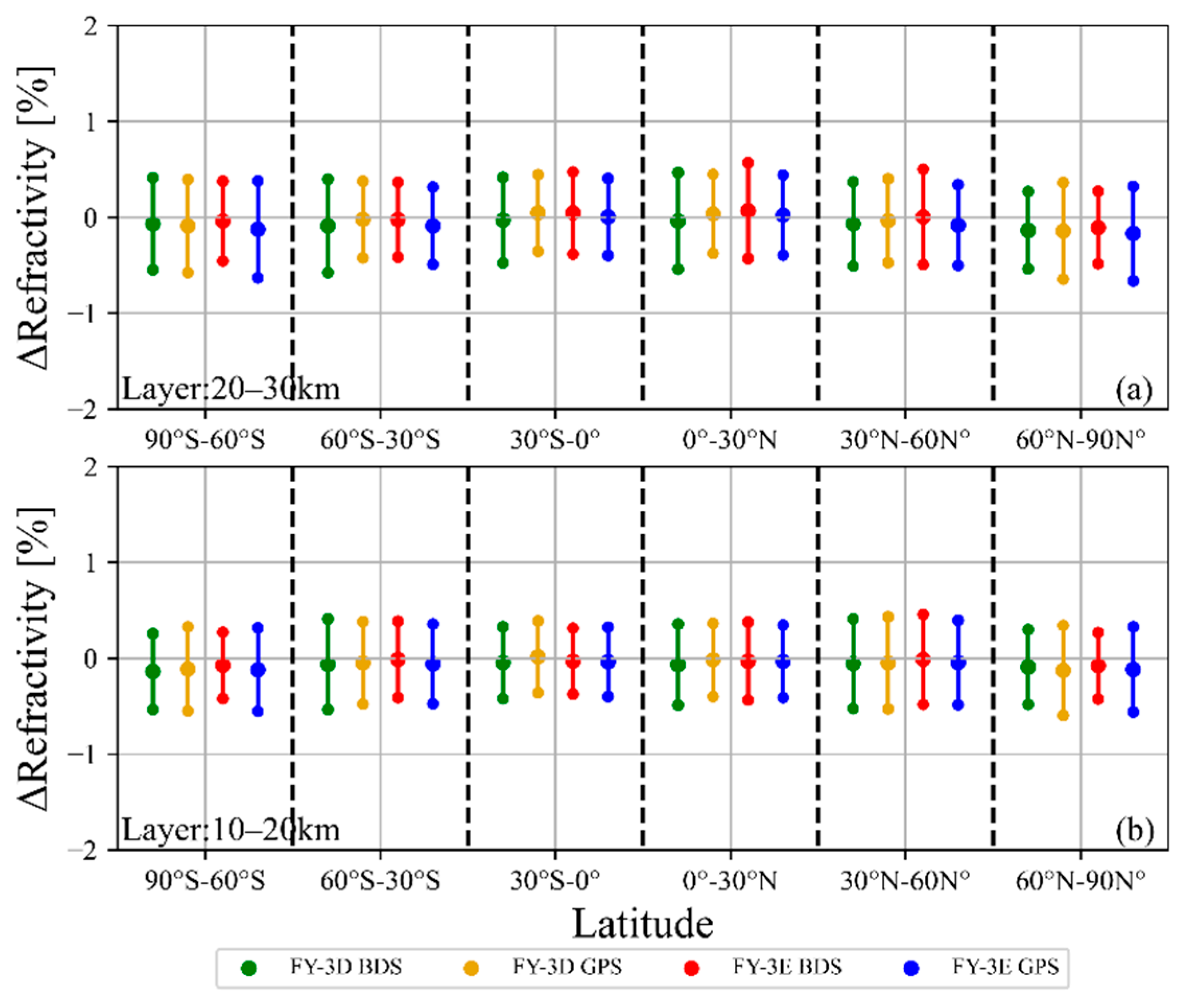
- The refractivity retrieval intercomparisons also demonstrated robust stability and accuracy along time (multi months), in different latitude bands and across all transmitter subsystems (GPS, BDS) for both the FY-3E GNOS II RO and FY-3D GNOS RO data, with mean consistencies within 0.2% and standard deviations well within 1%, in the altitude layers of 10–20 km and 20–30 km.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hajj, G.A.; Kursinski, E.R. Analysis of errors in the vertical temperature profiles recovered from GPS occultation observations. Eos Trans. AGU 1991, 72, 372. [Google Scholar]
- Melbourne, W.G.; Davis, E.S.; Duncan, C.B.; Hajj, G.A.; Hardy, K.R.; Kursinski, E.R.; Meehan, T.K.; Yong, L.E.; Yunck, T.P. The Application of Spaceborne GPS to Atmospheric Limb Sounding and Global Change Monitoring; JPL Publucation 94–18; NASA: Washington, DC, USA, 1994.
- Kursinski, E.R.; Hajj, G.A.; Bertiger, W.I.; Leroy, S.S.; Meehan, T.K.; Romans, L.J.; Schofield, J.T.; McCleese, D.J.; Melbourne, W.G.; Thornton, C.L.; et al. Initial results of radio occultation observations of Earth’s atmosphere using the global positioning system. Science 1996, 271, 1107–1110. [Google Scholar] [CrossRef]
- Kursinski, E.R.; Hajj, G.A.; Schofield, J.T.; Linfield, R.P.; Hardy, K.R. Observing Earth’s atmosphere with radio occultation measurements using the global positioning system. J. Geophys. Res. 1997, 102, 23429–23465. [Google Scholar] [CrossRef]
- Kirchengast, G.; Schweitzer, S. Climate benchmark profiling of greenhouse gases and thermodynamic structure and wind from space. Geophys. Res. Lett. 2011, 38, L13701. [Google Scholar] [CrossRef]
- Harnisch, F.; Healy, S.B.; Bauer, P.; English, S.J. Scaling of GNSS radio occultation impact with observation number using an ensemble of data assimilations. Mon. Weather Rev. 2013, 141, 4395–4413. [Google Scholar] [CrossRef]
- Anthes, R.A. Exploring Earth’s atmosphere with radio occultation: Contributions to weather, climate and space weather. Atmos. Meas. Tech. 2011, 4, 1077–1103. [Google Scholar] [CrossRef]
- Bauer, P.; Radnóti, G.; Healy, S.; Cardinali, C. GNSS radio occultation constellation observing system experiments. Mon. Weather Rev. 2014, 142, 555–572. [Google Scholar] [CrossRef]
- Liao, M.; Healy, S.; Zhang, P. Processing and quality control of FY-3C GNOS data used in numerical weather prediction applications. Atmos. Meas. Tech. 2019, 12, 2679–2692. [Google Scholar] [CrossRef]
- Foelsche, U.; Pirscher, B.; Borsche, M.; Kirchengast, G.; Wickert, J. Assessing the climate monitoring utility of radio occultation data: From CHAMP to FORMOSAT-3/COSMIC. Terr. Atmos. Ocean. Sci. 2009, 20, 155–170. [Google Scholar] [CrossRef]
- Foelsche, U.; Scherllin-Pirscher, B.; Ladstädter, F.; Steiner, A.K.; Kirchengast, G. Refractivity and temperature climate records from multiple radio occultation satellites consistent within 0.05%. Atmos. Meas. Tech. 2011, 4, 2007–2018. [Google Scholar] [CrossRef]
- Lackner, B.C.; Steiner, A.K.; Hegerl, G.C.; Kirchengast, G. Atmospheric climate change detection by radio occultation data using a fingerprinting method. J. Clim. 2011, 24, 5275–5291. [Google Scholar] [CrossRef]
- Ladstädter, F.; Steiner, A.K.; Schwärz, M.; Kirchengast, G. Climate intercomparison of GPS radio occultation, RS90/92 radiosondes and GRUAN from 2002 to 2013. Atmos. Meas. Tech. 2015, 8, 1819–1834. [Google Scholar] [CrossRef]
- Innerkofler, J.; Kirchengast, G.; Schwärz, M.; Pock, C.; Jäggi, A.; Andres, Y.; Marquardt, C. Precise orbit determination for climate applications of GNSS radio occultation including uncertainty estimation. Remote Sens. 2020, 12, 1180. [Google Scholar] [CrossRef]
- Rocken, C.; Anthes, R.; Exner, M.; Hunt, D.; Sokolovskiy, S.; Ware, R.; Gorbunov, M.; Schreiner, W.; Feng, D.; Herman, B.; et al. Analysis and validation of GPS/MET data in the neutral atmosphere. J. Geophys. Res. Atmos. 1997, 102, 29849–29866. [Google Scholar] [CrossRef]
- Steiner, A.K.; Kirchengast, G.; Ladreiter, H.-P. Inversion, error analysis, and validation of GPS/MET occultaiton data. Ann. Geophys. 1999, 17, 122–138. [Google Scholar] [CrossRef]
- Jakowski, N.; Wehrenpfennig, A.; Heise, S.; Reigber, C.; Lühr, H.; Grunwaldt, L.; Meehan, T.K. GPS radio occultation measurements of the ionosphere from CHAMP: Early results. Geophys. Res. Lett. 2002, 29, 91–94. [Google Scholar] [CrossRef]
- Hajj, G.A.; Ao, C.O.; Iijima, B.A.; Kuang, D.; Kursinski, E.R.; Mannucci, A.J.; Meehan, T.K.; Romans, L.J.; Juarez, M.D.; Yunck, T.P. CHAMP and SAC-C atmospheric occultation results and intercomparisons. J. Geophys. Res. Atmos. 2004, 109, D06109. [Google Scholar] [CrossRef]
- Healy, S.B.; Wickert, J.; Michalak, G.; Schmidt, T.; Beyerle, G. Combined forecast impact of GRACE-A and CHAMP GPS radio occultation bending angle profiles. Atmos. Sci. Lett. 2007, 8, 43–50. [Google Scholar] [CrossRef]
- Luntama, J.-P.; Kirchengast, G.; Borsche, M.; Foelsche, U.; Steiner, A.K.; Healy, S.; von Engeln, A.; O’Clerigh, E.; Marquardt, C. Prospects of the EPS GRAS mission for operational atmospheric applications. Bull. Am. Meteorol. Soc. 2008, 89, 1863–1875. [Google Scholar] [CrossRef]
- Anthes, R.A.; Ector, D.; Hunt, D.C.; Kuo, Y.H.; Rocken, C.; Schreiner, W.S.; Sokolovskiy, S.V.; Syndergaard, S.; Wee, T.K.; Zeng, Z.; et al. The COSMIC/FORMOSAT-3 mission: Early results. Bull. Am. Meteorol. Soc. 2008, 89, 313–333. [Google Scholar] [CrossRef]
- Brahmanandam, P.S.; Uma, G.; Liu, J.Y.; Chu, Y.H.; Latha Devi, N.S.M.P.; Kakinami, Y. Global S4 index variations observed using FORMOSAT-3/ COSMIC GPS ro technique during a solar minimum year. J. Geophys. Res. Space Phys. 2012, 117, A09322. [Google Scholar] [CrossRef]
- Li, M.; Li, W.W.; Shi, C.; Jiang, K.C.; Guo, X.; Dai, X.L.; Meng, X.G.; Yang, Z.D.; Yang, G.L.; Liao, M. Precise orbit determination of the FengYun-3C satellite using onboard GPS and bds observations. J. Geod. 2017, 91, 1313–1327. [Google Scholar] [CrossRef]
- Yang, Y.X.; Liu, L.; Li, J.L.; Yang, Y.F.; Zhang, T.Q.; Mao, Y.; Sun, B.J.; Ren, X. Featured services and performance of BDS-3. Sci. Bull. 2021, 66, 2135–2143. [Google Scholar] [CrossRef] [PubMed]
- Hong, C.-K.; Bae, T.-S.; Kwon, J.H. An overview of a special issue on upcoming positioning, navigation, and timing: GPS, GLONASS, Galileo and BeiDou. Remote Sens. 2022, 14, 1982. [Google Scholar] [CrossRef]
- Zhang, Z.H.; Pan, L. Current performance of open position service with almost fully deployed multi-GNSS constellations: GPS, GLONASS, Galileo, BDS-2, and BDS-3. Adv. Space Res. 2022, 69, 1994–2019. [Google Scholar] [CrossRef]
- Bai, W.H.; Sun, Y.Q.; Xia, J.M.; Tan, G.Y.; Cheng, C.; Yang, G.L.; Du, Q.F.; Wang, X.Y.; Zhao, D.Y.; Tian, Y.S.; et al. Validation results of maximum S4 index in f-layer derived from GNOS on FY3C satellite. GPS Solut. 2018, 23, 1–14. [Google Scholar] [CrossRef]
- Yang, G.L.; Sun, Y.Q.; Bai, W.H.; Zhang, X.X.; Liu, C.L.; Meng, X.G.; Bi, Y.M.; Wang, D.W.; Zhao, D.Y. Validation results of NMF2 and HMF2 derived from ionospheric density profiles of GNOS on FY3C satellite. Sci. China Technol. Sci. 2018, 61, 1372–1383. [Google Scholar] [CrossRef]
- Bai, W.H.; Liu, C.L.; Meng, X.G.; Sun, Y.Q.; Kirchengast, G.; Du, Q.F.; Wang, X.Y.; Yang, G.L.; Liao, M.; Yang, Z.D.; et al. Evaluation of atmospheric profiles derived from single- and zero-difference excess phase processing of BeiDou radio occultation data from the FY3C GNOS mission. Atmos. Meas. Tech. 2018, 11, 819–833. [Google Scholar] [CrossRef]
- Sun, Y.Q.; Bai, W.H.; Liu, C.L.; Liu, Y.; Du, Q.F.; Wang, X.Y.; Yang, G.L.; Liao, M.; Yang, Z.D.; Zhang, X.X.; et al. The FengYun-3C radio occultation sounder GNOS: A review of the mission and its early results and science applications. Atmos. Meas. Tech. 2018, 11, 5797–5811. [Google Scholar] [CrossRef]
- Schreiner, W.S.; Weiss, J.P.; Anthes, R.A.; Braun, J.; Chu, V.; Fong, J.; Hunt, D.; Kuo, Y.H.; Meehan, T.; Serafino, W.; et al. COSMIC-2 radio occultation constellation: First results. Geophys. Res. Lett. 2020, 47, e2019GL086841. [Google Scholar] [CrossRef]
- Bowler, N.E. An assessment of GNSS radio occultation data produced by Spire. Q. J. R. Meteorol. Soc. 2020, 146, 3772–3788. [Google Scholar] [CrossRef]
- Forsythe, V.V.; Duly, T.; Hampton, D.; Nguyen, V. Validation of ionospheric electron density measurements derived from Spire cubesat constellation. Radio Sci. 2020, 55, e2019RS006953. [Google Scholar] [CrossRef]
- da Silva Curiel, A.; Boland, L.; Cooksley, J.; Bekhti, M.; Stephens, P.; Sun, W.; Sweeting, M. First results from the disaster monitoring constellation (DMC). Acta Astronaut. 2005, 56, 261–271. [Google Scholar] [CrossRef]
- Clarizia, M.P.; Gommenginger, C.P.; Gleason, S.T.; Srokosz, M.A.; Galdi, C.; Di Bisceglie, M. Analysis of GNSS-R delay-Doppler maps from the UK-DMC satellite over the ocean. Geophys. Res. Lett. 2009, 36, L02608. [Google Scholar] [CrossRef]
- Unwin, M.; Jales, P.; Tye, J.; Gommenginger, C.; Foti, G.; Rosello, J. Spaceborne GNSS-reflectometry on TechDemoSat-1: Early mission operations and exploitation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4525–4539. [Google Scholar] [CrossRef]
- Li, W.Q.; Cardellach, E.; Fabra, F.; Rius, A.; Ribó, S.; Martín-Neira, M. First spaceborne phase altimetry over sea ice using TechDemoSat-1 GNSS-R signals. Geophys. Res. Lett. 2017, 44, 8369–8376. [Google Scholar] [CrossRef]
- Ruf, C.; Gleason, S.; Jelenak, Z.; Katzberg, S.; Ridley, A.; Rose, R.; Scherrer, J.; Zavorotny, V. The NASA EV-2 cyclone global navigation satellite system (CYGNSS) mission. In Proceedings of the IEEE Conference on Aerospace, Big Sky, MT, USA, 2–9 March 2013; pp. 1–7. [Google Scholar]
- Clarizia, M.P.; Pierdicca, N.; Costantini, F.; Floury, N. Analysis of CYGNSS data for soil moisture retrieval. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 2227–2235. [Google Scholar] [CrossRef]
- Sun, Y.Q.; Liu, C.L.; Du, Q.F.; Wang, X.Y.; Bai, W.H.; Kirchengast, G.; Xia, J.M.; Meng, X.G.; Wang, D.W.; Cai, Y.R.; et al. Global navigation satellite system occultation sounder II (GNOS II). In Proceedings of the 2017 IGARSS International Geoscience and Remote Sensing Symposium, Fort Worth, TX, USA, 23–28 July 2017; pp. 1189–1192. [Google Scholar]
- Du, Q.F.; Sun, Y.Q.; Bai, W.H.; Wang, X.Y.; Wang, D.W.; Meng, X.G.; Cai, Y.R.; Xia, J.M.; Wu, C.J.; Liu, C.L.; et al. The advancements in research of FY-3 GNOS II and instrument performance. In Proceedings of the 2018 IGARSS International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 3347–3350. [Google Scholar]
- Wang, X.Y.; Tian, Y.S.; Sun, Y.Q.; Wang, D.W.; Wu, C.J.; Du, Q.F.; Cai, Y.R.; Bai, W.H.; Xia, J.M.; Li, W.; et al. Software design of GNOS II’s GNSS-R module. In Proceedings of the 2018 IGARSS International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 1075–1077. [Google Scholar]
- Sun, Y.Q.; Wang, X.Y.; Du, Q.F.; Bai, W.H.; Xia, J.M.; Cai, Y.R.; Wang, D.W.; Wu, C.J.; Meng, X.G.; Liu, C.L.; et al. The status and progress of FengYun-3E GNOS II mission for GNSS remote sensing. In Proceedings of the 2018 IGARSS International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 5181–5184. [Google Scholar]
- Yang, G.L.; Bai, W.H.; Wang, J.S.; Hu, X.Q.; Zhang, P.; Sun, Y.Q.; Xu, N.; Zhai, X.C.; Xiao, X.J.; Xia, J.M.; et al. FY3E GNOS II GNSS reflectometry: Mission review and first results. Remote Sens. 2022, 14, 988. [Google Scholar] [CrossRef]
- Liao, M.; Zhang, P.; Yang, G.L.; Bi, Y.M.; Liu, Y.; Bai, W.H.; Meng, X.G.; Du, Q.F.; Sun, Y.Q. Preliminary validation of the refractivity from the new radio occultation sounder GNOS/FY-3C. Atmos. Meas. Tech. 2016, 9, 781–792. [Google Scholar] [CrossRef]
- Hou, X.Y.; Han, Y.; Hu, X.Q.; Weng, F.Z. Verification of FengYun-3D MWTS and MWHS calibration accuracy using GPS radio occultation data. J. Meteorol. Res. 2019, 33, 695–704. [Google Scholar] [CrossRef]
- Bai, W.H.; Sun, Y.Q.; Du, Q.F.; Yang, G.L.; Yang, Z.D.; Zhang, P.; Bi, Y.M.; Wang, X.Y.; Cheng, C.; Han, Y. An introduction to the FY3 GNOS instrument and mountain-top tests. Atmos. Meas. Tech. 2014, 7, 1817–1823. [Google Scholar] [CrossRef]
- Mao, T.; Sun, L.F.; Yang, G.L.; Yue, X.A.; Yu, T.; Huang, C.; Zeng, Z.C.; Wang, Y.G.; Wang, J.S. First ionospheric radio-occultation measurements from GNSS occultation sounder on the chinese Feng-Yun 3C satellite. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5044–5053. [Google Scholar] [CrossRef]
- Cai, Y.R.; Bai, W.H.; Wang, X.Y.; Sun, Y.Q.; Du, Q.F.; Zhao, D.Y.; Meng, X.G.; Liu, C.L.; Xia, J.M.; Wang, D.W.; et al. In-orbit performance of GNOS on-board FY3-C and the enhancements for FY3-D satellite. Adv. Space Res. 2017, 60, 2812–2821. [Google Scholar] [CrossRef]
- Wang, D.W.; Tian, Y.S.; Sun, Y.Q.; Du, Q.F.; Wang, X.Y.; Bai, W.H.; Cai, Y.R.; Wu, C.J.; Liu, C.; Xia, J.M.; et al. Preliminary in-orbit evaluation of GNOS on FY3D satellite. In Proceedings of the 2018 IGARSS International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 9161–9163. [Google Scholar]
- Wang, S.Z.; Zhu, G.W.; Bai, W.H.; Liu, C.L. For the first time FengYun3 C satellite-global navigation satellite system occultation sounder achieved spaceborne bei dou system radio occultation. Physics 2015, 64, 408–415. [Google Scholar]
- Du, Q.F.; Sun, Y.Q.; Bai, W.H.; Wang, X.Y.; Wang, D.W.; Meng, X.G.; Cai, Y.R.; Xia, J.M.; Wu, C.J.; Liu, C.L.; et al. The on-orbit performance of FY-3D GNOS. In Proceedings of the 2018 IGARSS International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 7669–7671. [Google Scholar]
- Liu, C.L.; Kirchengast, G.; Sun, Y.Q.; Proschek, V.; Wang, X.; Tian, L.F.; Du, Q.F.; Bai, W.H.; Wu, C.J.; Hu, P.; et al. Impacts of orbital and constellation parameters on the number and spatiotemporal coverage of LEO-LEO occultation events. Remote Sens. 2021, 13, 4849. [Google Scholar] [CrossRef]
- Brodzik, M.J.; Billingsley, B.; Haran, T.; Raup, B.; Savoie, M.H. Ease-grid 2.0: Incremental but significant improvements for Earth-gridded data sets. ISPRS Int. J. Geo-Inf. 2012, 1, 32–45. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| FY-3C GNOS | FY-3D GNOS | FY-3E GNOS II | |
|---|---|---|---|
| Frequencies | GPS: L1, L2C, L2P BDS-2: B1, B2 | GPS: L1, L2C, L2P BDS-2: B1, B2 | GPS: L1, L2C, L2P BDS-2/-3: B1, B3 |
| Navigation channels | GPS: 8 BDS-2: 4 | GPS: 9 BDS-2: 6 | GPS: 12 BDS-2/-3: 12 |
| Occultation channels | GPS: 6 BDS-2: 4 | GPS: 8 BDS-2: 6 | GPS: 14 BDS-2/-3: 8 |
| POD antenna | Patch antenna | Patch antenna | Choke-ring antenna |
| Atmosphere antenna | 4-element patch antenna 7.0 dBi@45° azimuth | 5-element patch antenna 8.5 dBi@45° azimuth | 9-element patch antenna 10 dBi@45° azimuth |
| Sampling rate | Navigation data and ionosphere occultation: 1 Hz Atmosphere occultation: 50 Hz @close loop, 100 Hz @open loop | ||
| Observables | Pseudo-range, carrier phase, amplitude (SNR) | ||
| FY-3D GNOS BDS | FY-3E GNOS II BDS | |
|---|---|---|
| MEO | C11, C12, C14 | C11, C12, C14, C16, C19, C20, C21, C22, C23, C24, C25, C26, C27, C28, C29, C30, C32, C33, C34, C35, C36, C37, C41, C42, C43, C44, C45, C46 |
| IGSO | C06, C07, C08, C09, C10, C13 | C06, C07, C08, C09, C10, C13, C38, C39, C40 |
| GEO | C01, C02, C03, C04, C05 | / |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Liao, M.; Sun, Y.; Wang, X.; Liang, J.; Hu, X.; Zhang, P.; Yang, G.; Liu, Y.; Wang, J.; et al. Preliminary Assessment of BDS Radio Occultation Retrieval Quality and Coverage Using FY-3E GNOS II Measurements. Remote Sens. 2023, 15, 5011. https://doi.org/10.3390/rs15205011
Liu C, Liao M, Sun Y, Wang X, Liang J, Hu X, Zhang P, Yang G, Liu Y, Wang J, et al. Preliminary Assessment of BDS Radio Occultation Retrieval Quality and Coverage Using FY-3E GNOS II Measurements. Remote Sensing. 2023; 15(20):5011. https://doi.org/10.3390/rs15205011
Chicago/Turabian StyleLiu, Congliang, Mi Liao, Yueqiang Sun, Xi Wang, Jiahui Liang, Xiuqing Hu, Peng Zhang, Guanglin Yang, Yan Liu, Jinsong Wang, and et al. 2023. "Preliminary Assessment of BDS Radio Occultation Retrieval Quality and Coverage Using FY-3E GNOS II Measurements" Remote Sensing 15, no. 20: 5011. https://doi.org/10.3390/rs15205011
APA StyleLiu, C., Liao, M., Sun, Y., Wang, X., Liang, J., Hu, X., Zhang, P., Yang, G., Liu, Y., Wang, J., Bai, W., Du, Q., Meng, X., Hu, P., Tan, G., Wang, X., Xia, J., Huang, F., Yin, C., ... Kirchengast, G. (2023). Preliminary Assessment of BDS Radio Occultation Retrieval Quality and Coverage Using FY-3E GNOS II Measurements. Remote Sensing, 15(20), 5011. https://doi.org/10.3390/rs15205011