

Plot-Scale Irrigation Dates and Amount Detection Using Surface Soil Moisture Derived from Sentinel-1 SAR Data in the Optirrig Crop Model
 ,
,  , and
, and 
Abstract
:
1. Introduction
2. Materials
2.1. Study Sites and Meteorological Data
2.2. Site Management and Irrigation Datasets
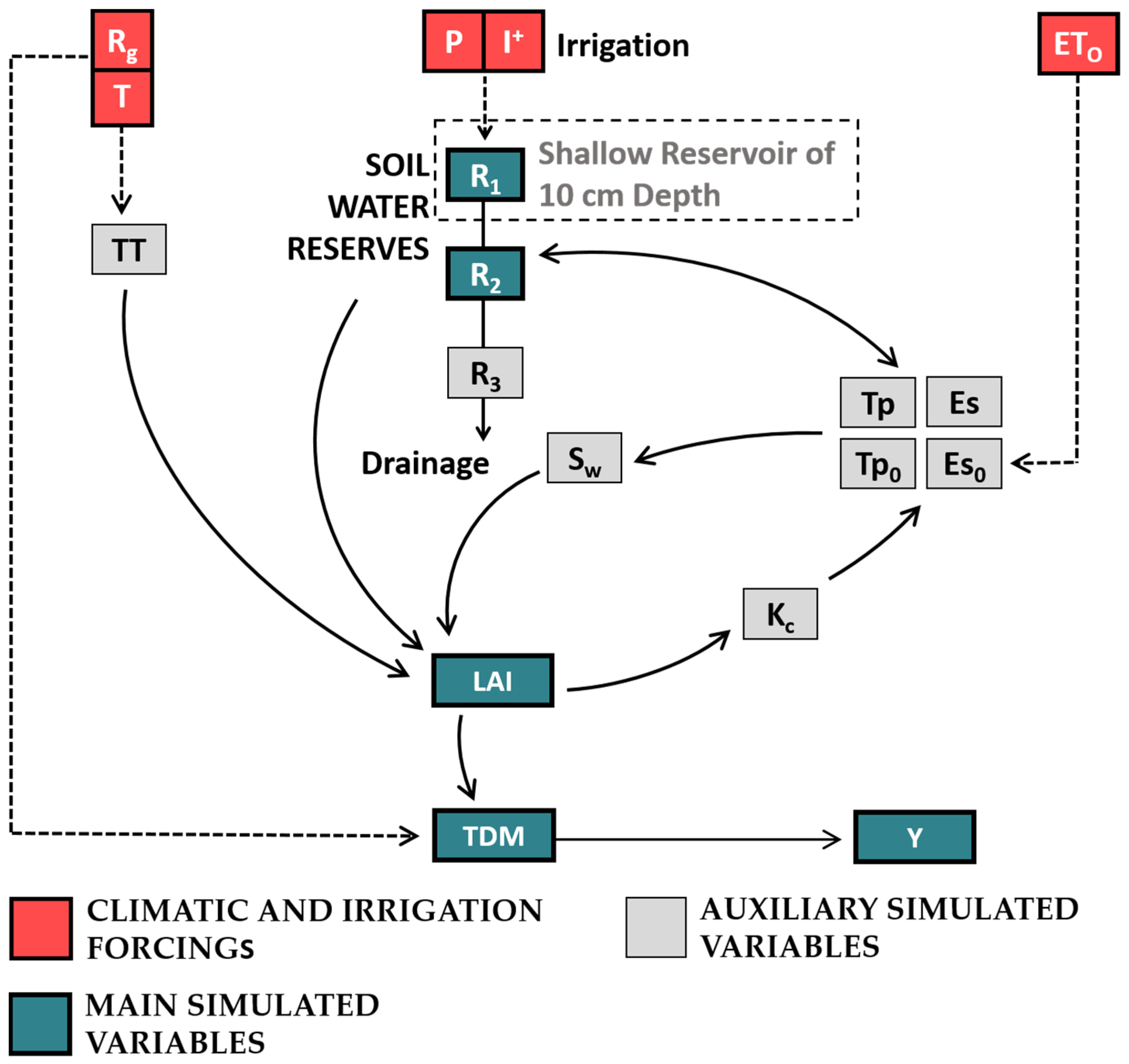
2.3. Optirrig Model Description
2.4. Sentinel-1 SAR Data
2.5. Sentinel-2 Optical Data
3. Methods
3.1. S2MP for SSM Estimation
3.1.1. SSM Estimation at Plot Scale
3.1.2. SSM Estimation at the Grid Scale
3.2. Optirrig Simulations
3.2.1. Simulated SSM Evolution
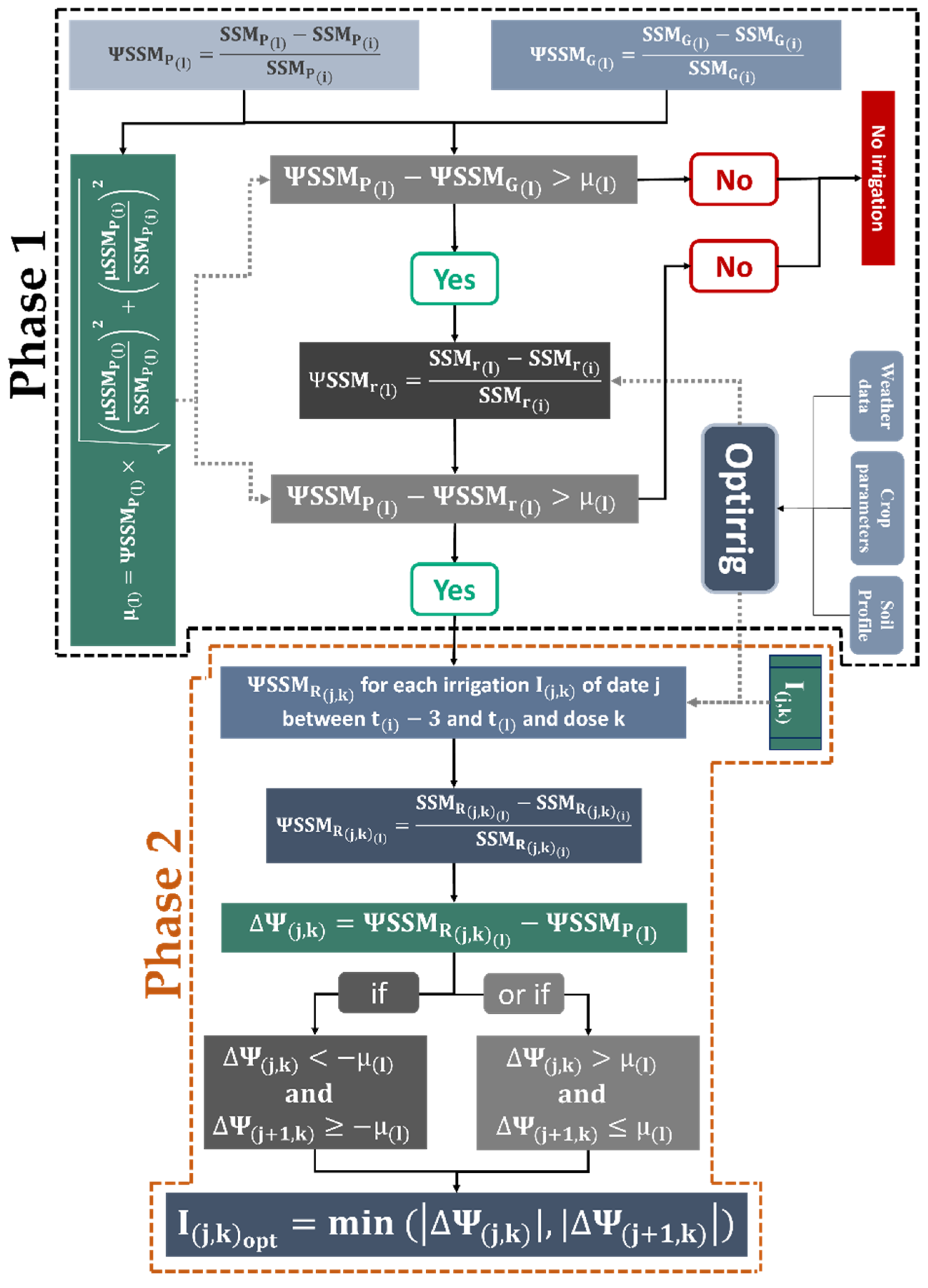
3.2.2. Inversion Approach for Irrigation Detection
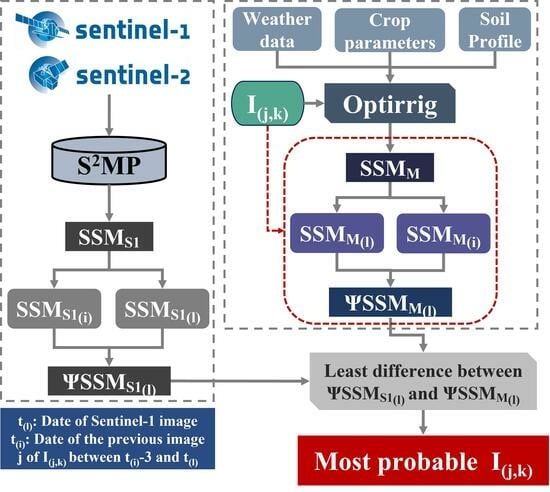
3.3. Workflow for the Detection of Irrigation Events
3.4. Metrics Associated with Detection Issues
4. Results
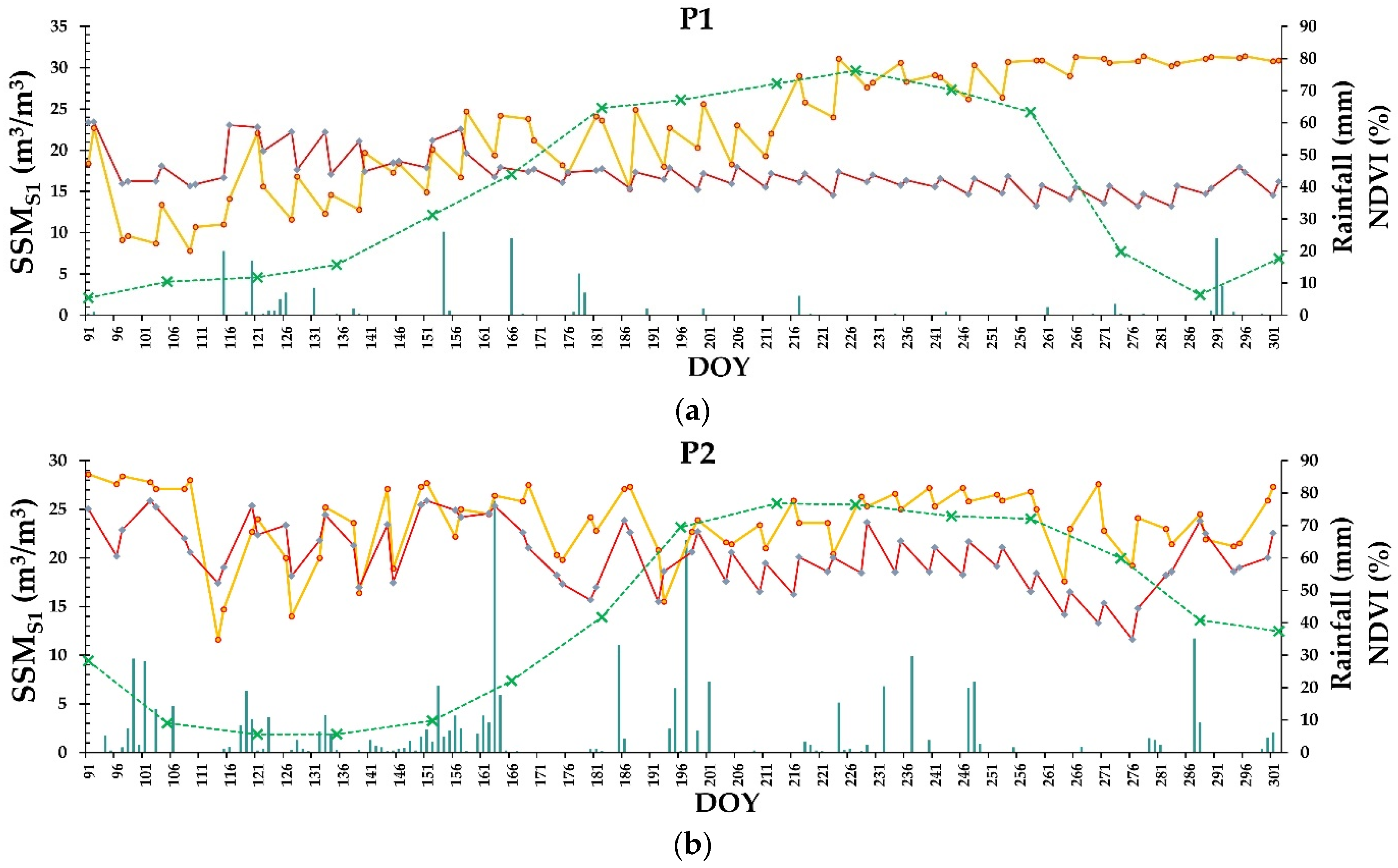
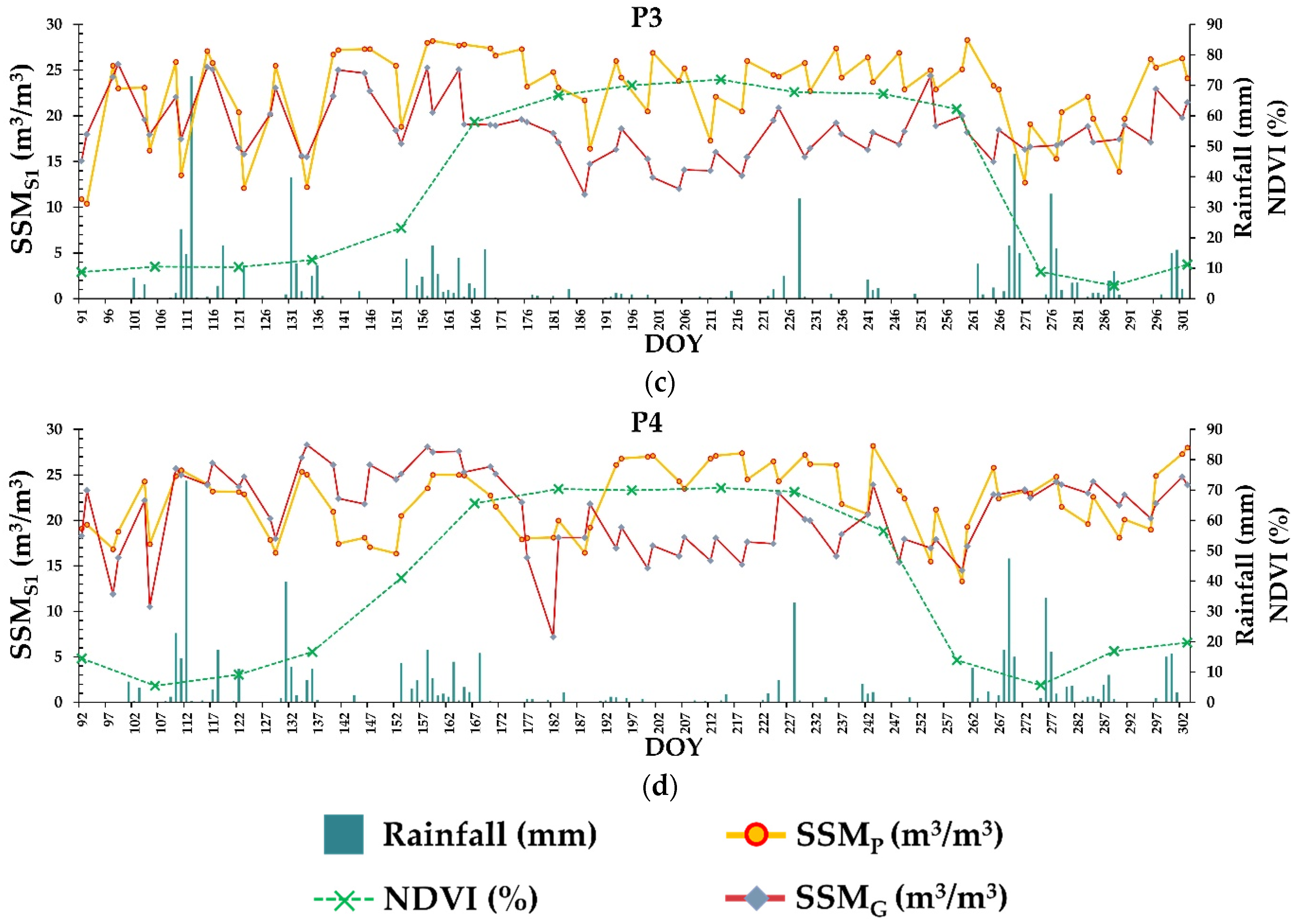
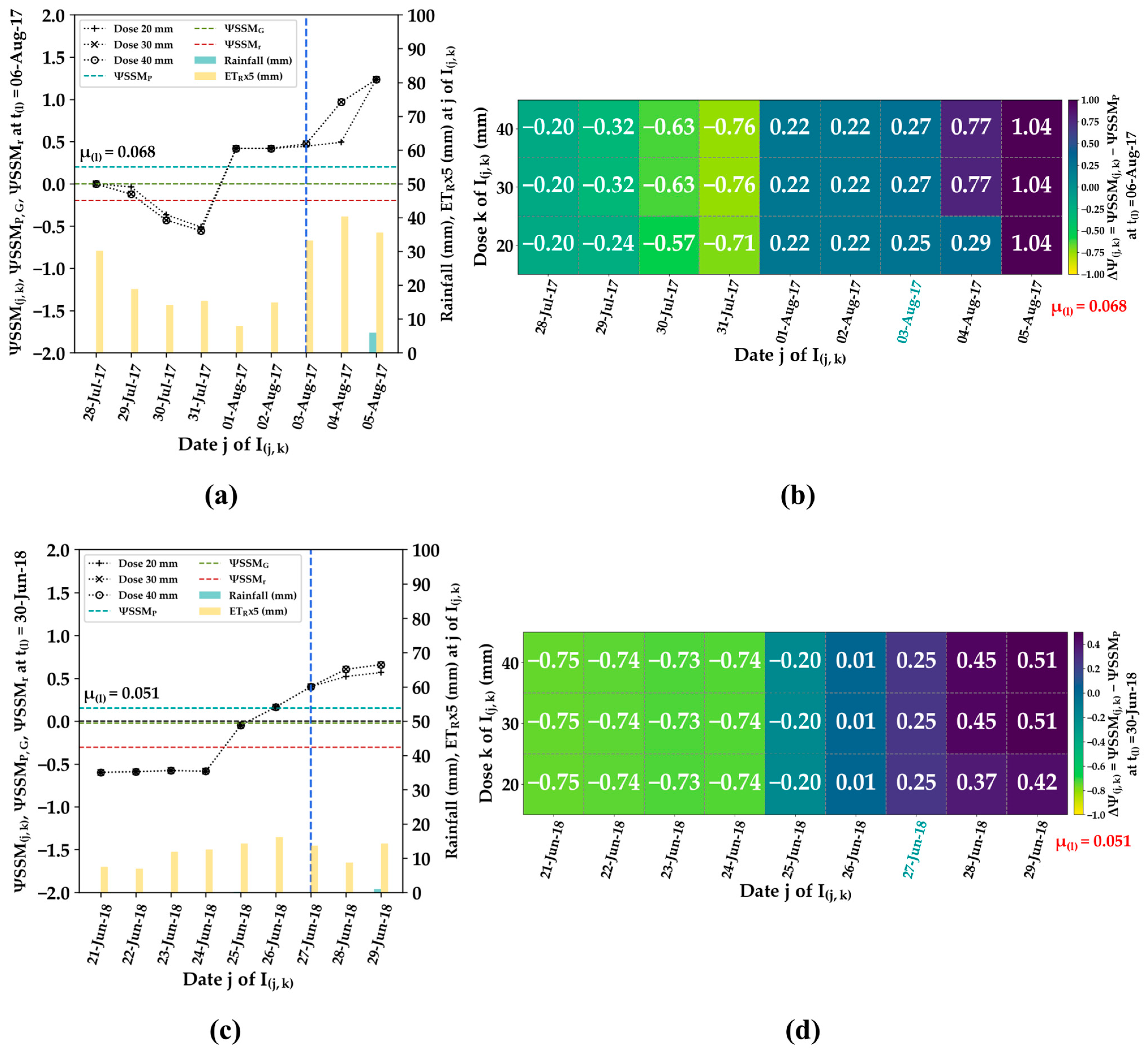
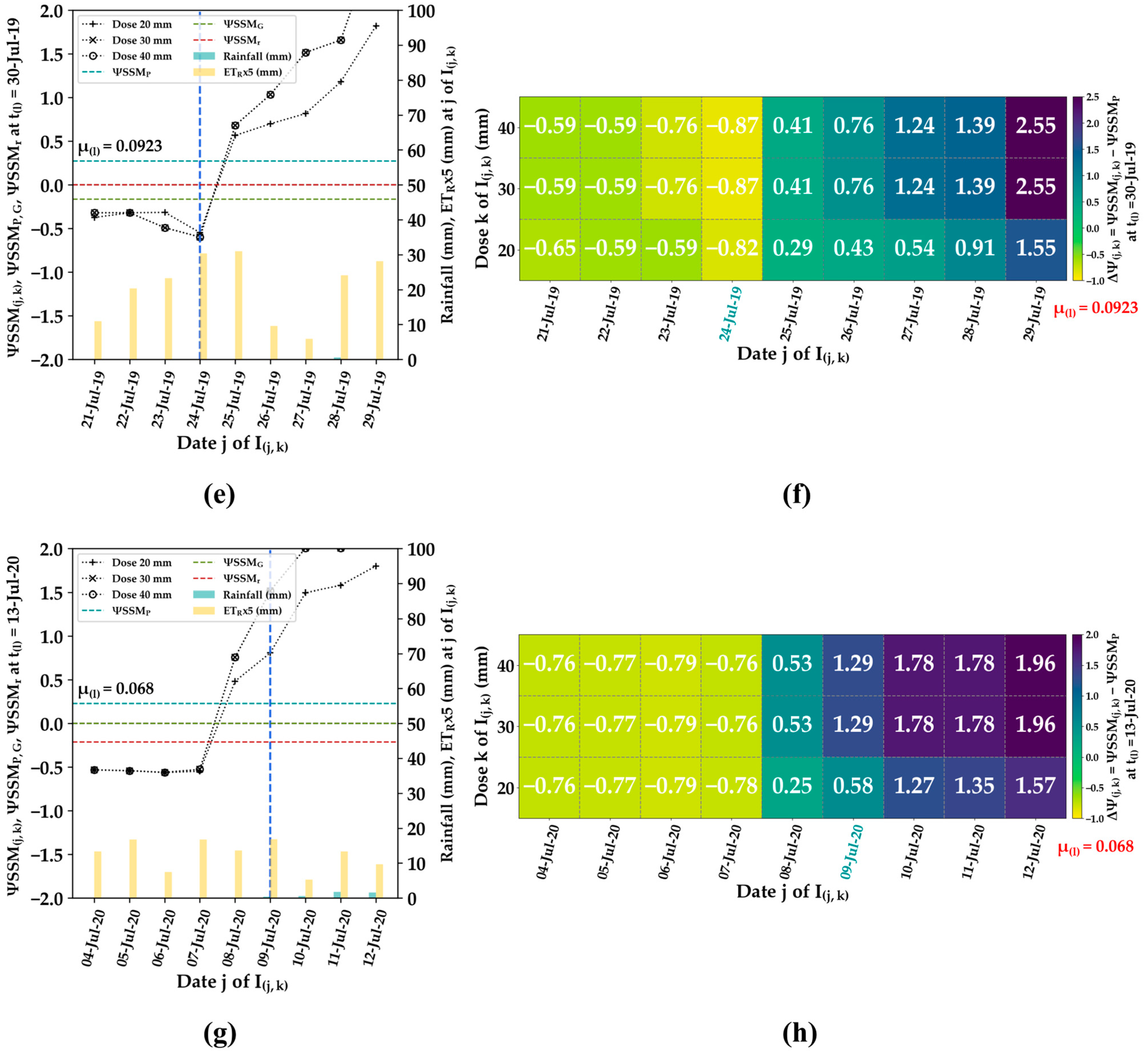
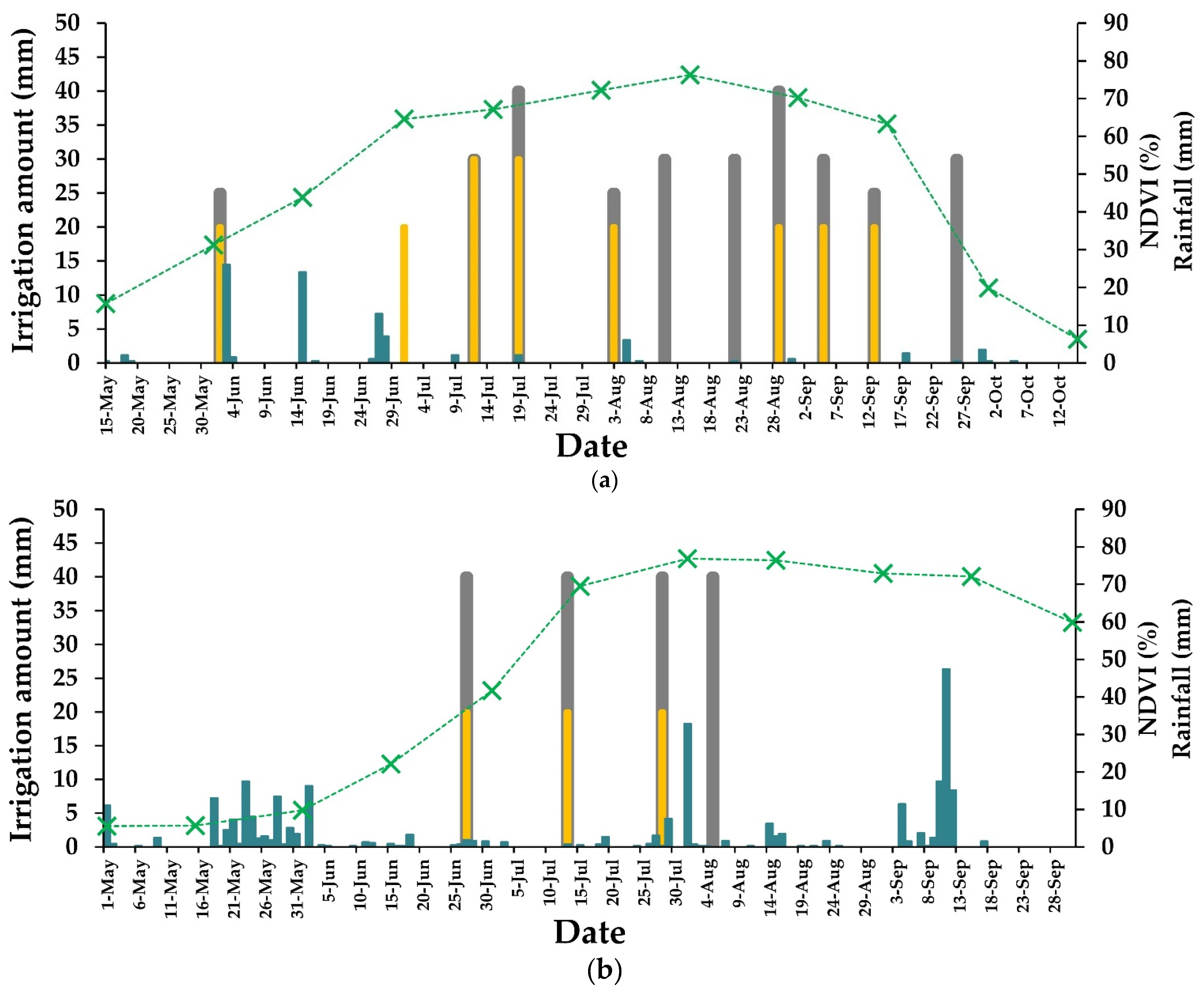
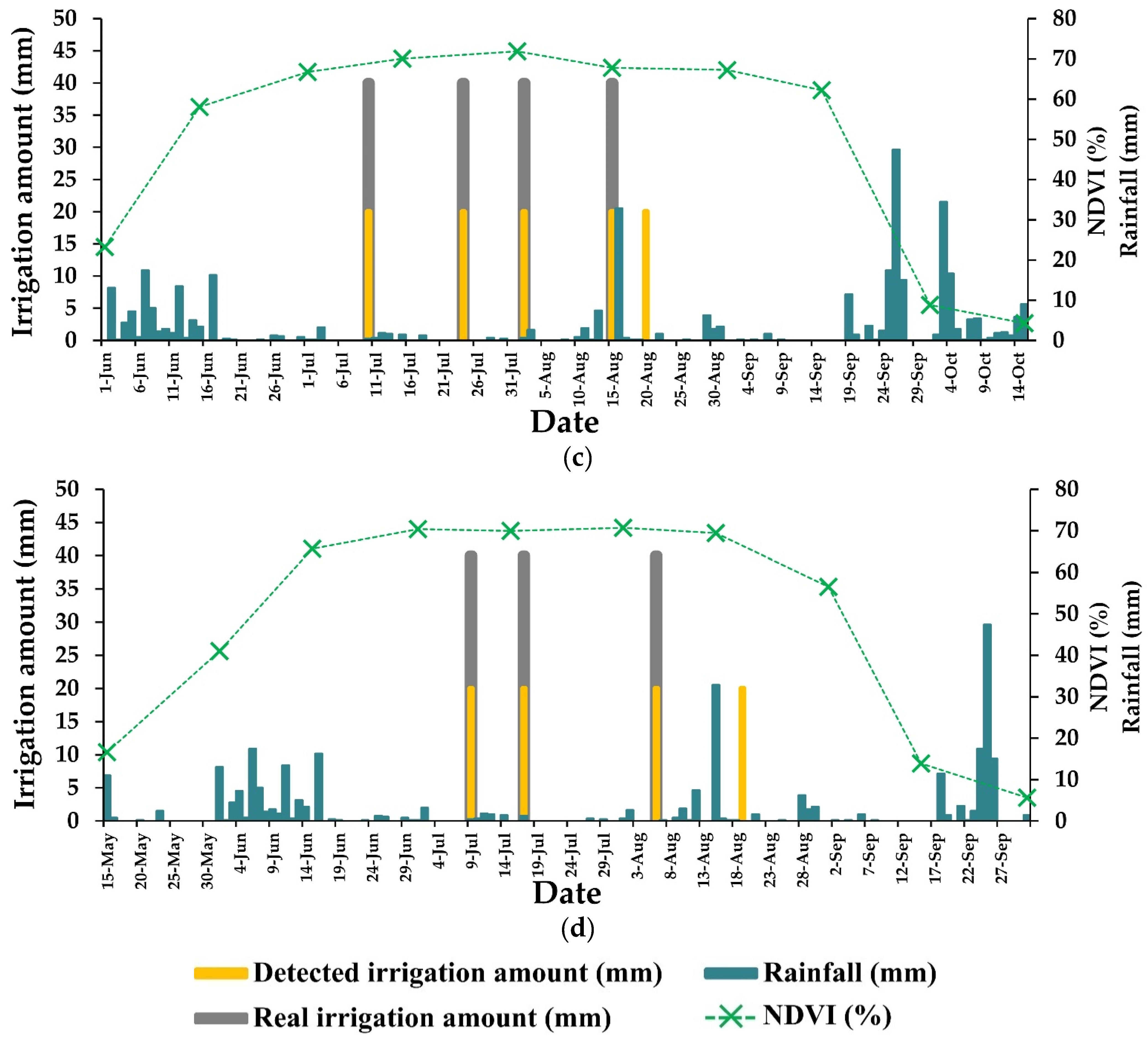
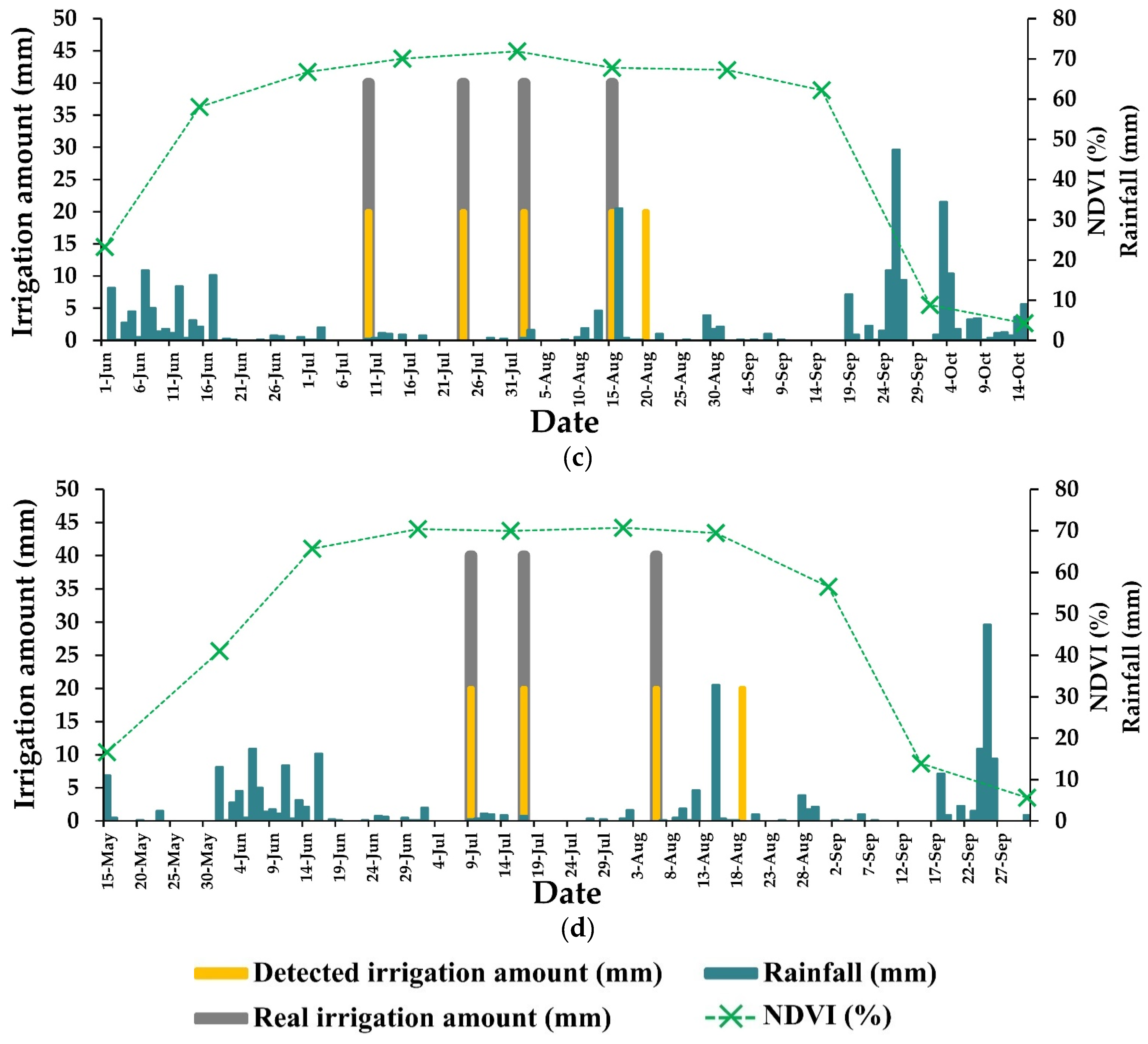
4.1. Detection of Irrigation Dates and Amounts
- For P2: The detected irrigation date was 26 June 2018 and the actual date was 27 June 2018;
- For P3: The detected irrigation date was 25 July 2019 and the actual date was 24 July 2019;
- For P4: The detected irrigation date was 08 July 2020 and the actual date was 09 July 2020.
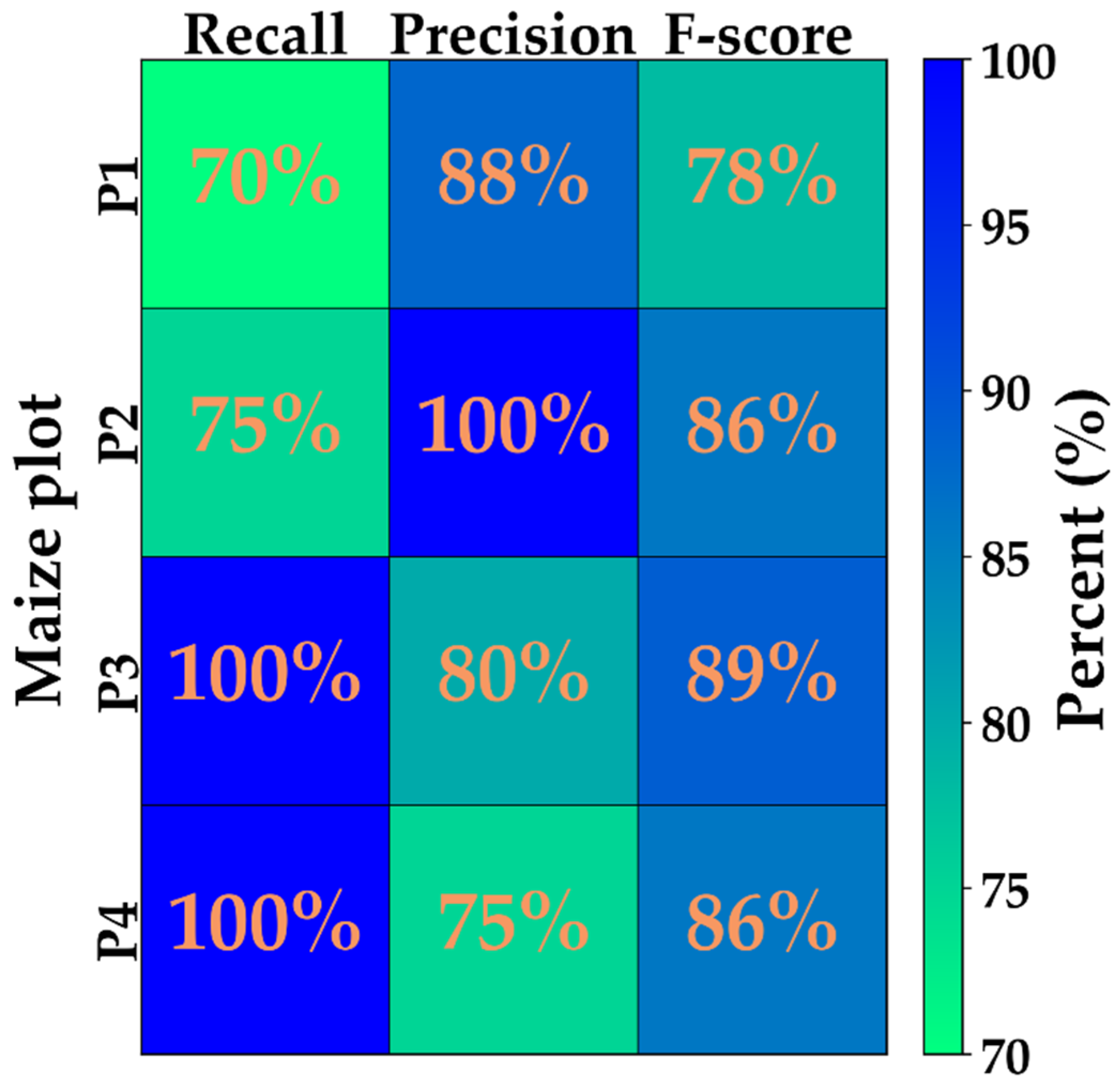
4.2. Irrigation Events Detection Performance
5. Discussion
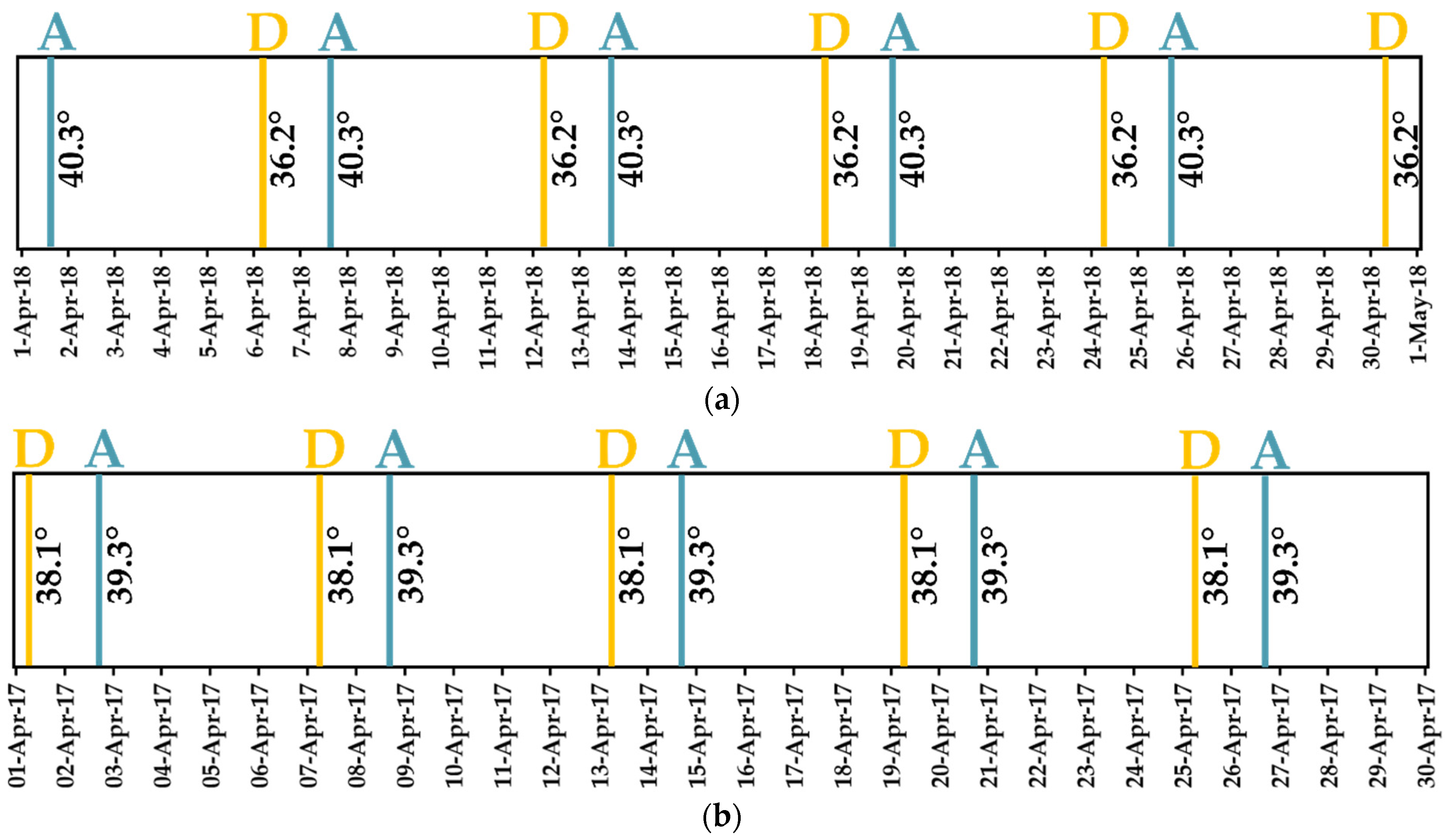
5.1. Sentinel-1 Revisit Time
5.2. Climatic and Soil Conditions
5.3. C-Band SAR Signal Penetration through Dense Vegetation Cover
5.4. Farmer’s Irrigation Practice Variability
5.5. Uncertainties Associated with Optirrig’s Simulations
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wu, B.; Tian, F.; Zhang, M.; Piao, S.; Zeng, H.; Zhu, W.; Liu, J.; Elnashar, A.; Lu, Y. Quantifying Global Agricultural Water Appropriation with Data Derived from Earth Observations. J. Clean. Prod. 2022, 358, 131891. [Google Scholar] [CrossRef]
- Harmanny, K.S.; Malek, Ž. Adaptations in Irrigated Agriculture in the Mediterranean Region: An Overview and Spatial Analysis of Implemented Strategies. Reg. Environ. Chang. 2019, 19, 1401–1416. [Google Scholar] [CrossRef]
- Raza, A.; Razzaq, A.; Mehmood, S.S.; Zou, X.; Zhang, X.; Lv, Y.; Xu, J. Impact of Climate Change on Crops Adaptation and Strategies to Tackle Its Outcome: A Review. Plants 2019, 8, 34. [Google Scholar] [CrossRef]
- Fahad, S.; Bajwa, A.A.; Nazir, U.; Anjum, S.A.; Farooq, A.; Zohaib, A.; Sadia, S.; Nasim, W.; Adkins, S.; Saud, S.; et al. Crop Production under Drought and Heat Stress: Plant Responses and Management Options. Front. Plant Sci. 2017, 8, 1147. [Google Scholar] [CrossRef]
- Piscitelli, L.; Colovic, M.; Aly, A.; Hamze, M.; Todorovic, M.; Cantore, V.; Albrizio, R. Adaptive Agricultural Strategies for Facing Water Deficit in Sweet Maize Production: A Case Study of a Semi-Arid Mediterranean Region. Water 2021, 13, 3285. [Google Scholar] [CrossRef]
- Elwan, E.; Page, M.L.; Jarlan, L.; Baghdadi, N.; Brocca, L.; Modanesi, S.; Dari, J.; Segui, P.Q.; Zribi, M. Irrigation Mapping on Two Contrasted Climatic Contexts Using Sentinel-1 and Sentinel-2 Data. Water 2022, 14, 804. [Google Scholar] [CrossRef]
- Saux-Picart, S.; Ottlé, C.; Decharme, B.; André, C.; Zribi, M.; Perrier, A.; Coudert, B.; Boulain, N.; Cappelaere, B.; Descroix, L.; et al. Water and Energy Budgets Simulation over the AMMA-Niger Super-Site Spatially Constrained with Remote Sensing Data. J. Hydrol. 2009, 375, 287–295. [Google Scholar] [CrossRef]
- Singh, M.; Karada, M.S.; Rai, R.K.; Pratap, D.; Agnihotri, D.; Singh, A.K.; Singh, B.K. A Review on Remote Sensing as a Tool for Irrigation Monitoring and Management. Int. J. Environ. Clim. Chang. 2023, 13, 203–211. [Google Scholar] [CrossRef]
- Babaeian, E.; Sidike, P.; Newcomb, M.S.; Maimaitijiang, M.; White, S.A.; Demieville, J.; Ward, R.W.; Sadeghi, M.; LeBauer, D.S.; Jones, S.B.; et al. A New Optical Remote Sensing Technique for High-Resolution Mapping of Soil Moisture. Front. Big Data 2019, 2, 37. [Google Scholar] [CrossRef] [PubMed]
- Longo-Minnolo, G.; Consoli, S.; Vanella, D.; Ramírez-Cuesta, J.M.; Greimeister-Pfeil, I.; Neuwirth, M.; Vuolo, F. A Stand-Alone Remote Sensing Approach Based on the Use of the Optical Trapezoid Model for Detecting the Irrigated Areas. Agric. Water Manag. 2022, 274, 107975. [Google Scholar] [CrossRef]
- Demarez, V.; Helen, F.; Marais-Sicre, C.; Baup, F. In-Season Mapping of Irrigated Crops Using Landsat 8 and Sentinel-1 Time Series. Remote Sens. 2019, 11, 118. [Google Scholar] [CrossRef]
- Ambika, A.K.; Wardlow, B.; Mishra, V. Remotely Sensed High Resolution Irrigated Area Mapping in India for 2000 to 2015. Sci. Data 2016, 3, 160118. [Google Scholar] [CrossRef] [PubMed]
- Dari, J.; Brocca, L.; Quintana-Seguí, P.; Escorihuela, M.J.; Stefan, V.; Morbidelli, R. Exploiting High-Resolution Remote Sensing Soil Moisture to Estimate Irrigation Water Amounts over a Mediterranean Region. Remote Sens. 2020, 12, 2593. [Google Scholar] [CrossRef]
- Ghazaryan, G.; Ernst, S.; Sempel, F.; Nendel, C. Field-Level Irrigation Monitoring with Integrated Use of Optical and Radar Time Series in Temperate Regions. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Kuala Lumpur, Malaysia, 17–22 July 2022. [Google Scholar]
- Bazzi, H.; Baghdadi, N.; Amin, G.; Fayad, I.; Zribi, M.; Demarez, V.; Belhouchette, H. An Operational Framework for Mapping Irrigated Areas at Plot Scale Using Sentinel-1 and Sentinel-2 Data. Remote Sens. 2021, 13, 2584. [Google Scholar] [CrossRef]
- Bazzi, H.; Baghdadi, N.; Fayad, I.; Charron, F.; Zribi, M.; Belhouchette, H. Irrigation Events Detection over Intensively Irrigated Grassland Plots Using Sentinel-1 Data. Remote Sens. 2020, 12, 4058. [Google Scholar] [CrossRef]
- Bazzi, H.; Baghdadi, N.; Fayad, I.; Zribi, M.; Belhouchette, H.; Demarez, V. Near Real-Time Irrigation Detection at Plot Scale Using Sentinel-1 Data. Remote Sens. 2020, 12, 1456. [Google Scholar] [CrossRef]
- Deines, J.M.; Kendall, A.D.; Hyndman, D.W. Annual Irrigation Dynamics in the U.S. Northern High Plains Derived from Landsat Satellite Data. Geophys. Res. Lett. 2017, 44, 9350–9360. [Google Scholar] [CrossRef]
- Chen, Y.; Lu, D.; Luo, L.; Pokhrel, Y.; Deb, K.; Huang, J.; Ran, Y. Detecting Irrigation Extent, Frequency, and Timing in a Heterogeneous Arid Agricultural Region Using MODIS Time Series, Landsat Imagery, and Ancillary Data. Remote Sens. Environ. 2018, 204, 197–211. [Google Scholar] [CrossRef]
- Colovic, M.; Yu, K.; Todorovic, M.; Cantore, V.; Hamze, M.; Albrizio, R.; Stellacci, A.M. Hyperspectral Vegetation Indices to Assess Water and Nitrogen Status of Sweet Maize Crop. Agronomy 2022, 12, 2181. [Google Scholar] [CrossRef]
- Hamze, M.; Cheviron, B.; Baghdadi, N.; Lo, M.; Courault, D.; Zribi, M. Detection of Irrigation Dates and Amounts on Maize Plots from the Integration of Sentinel-2 Derived Leaf Area Index Values in the Optirrig Crop Model. Agric. Water Manag. 2023, 283, 108315. [Google Scholar] [CrossRef]
- Zaussinger, F.; Dorigo, W.; Gruber, A.; Tarpanelli, A.; Filippucci, P.; Brocca, L. Estimating Irrigation Water Use over the Contiguous United States by Combining Satellite and Reanalysis Soil Moisture Data. Hydrol. Earth Syst. Sci. 2019, 23, 897–923. [Google Scholar] [CrossRef]
- Brocca, L.; Tarpanelli, A.; Filippucci, P.; Dorigo, W.; Zaussinger, F.; Gruber, A.; Fernández-Prieto, D. How Much Water Is Used for Irrigation? A New Approach Exploiting Coarse Resolution Satellite Soil Moisture Products. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 752–766. [Google Scholar] [CrossRef]
- Li, Z.; Liu, H.; Zhao, W.; Yang, Q.; Yang, R.; Liu, J. Estimation of Evapotranspiration and Other Soil Water Budget Components in an Irrigated Agricultural Field of a Desert Oasis, Using Soil Moisture Measurements. Hydrol. Earth Syst. Sci. Discuss. 2018, 1–17. [Google Scholar] [CrossRef]
- Vahmani, P. Modeling and Remote Sensing of Urban Land-Atmosphere Interactions with a Focus on Urban Irrigation. UCLA, ProQuest ID: Vahmani_ucla_0031D_12826. 2014. Available online: https://escholarship.org/uc/item/55b2g4wf (accessed on 9 November 2022).
- Koech, R.; Langat, P. Improving Irrigation Water Use Efficiency: A Review of Advances, Challenges and Opportunities in the Australian Context. Water 2018, 10, 1771. [Google Scholar] [CrossRef]
- Karthikeyan, L.; Pan, M.; Wanders, N.; Kumar, D.N.; Wood, E.F. Four Decades of Microwave Satellite Soil Moisture Observations: Part 1. A Review of Retrieval Algorithms. Adv. Water Resour. 2017, 109, 106–120. [Google Scholar] [CrossRef]
- Beale, J.; Waine, T.; Evans, J.; Corstanje, R. A Method to Assess the Performance of SAR-Derived Surface Soil Moisture Products. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 4504–4516. [Google Scholar] [CrossRef]
- Kumar, S.V.; Peters-Lidard, C.D.; Santanello, J.A.; Reichle, R.H.; Draper, C.S.; Koster, R.D.; Nearing, G.; Jasinski, M.F. Evaluating the Utility of Satellite Soil Moisture Retrievals over Irrigated Areas and the Ability of Land Data Assimilation Methods to Correct for Unmodeled Processes. Hydrol. Earth Syst. Sci. 2015, 19, 4463–4478. [Google Scholar] [CrossRef]
- Wagner, W.; Hahn, S.; Kidd, R.; Melzer, T.; Bartalis, Z.; Hasenauer, S.; Figa-Saldaña, J.; De Rosnay, P.; Jann, A.; Schneider, S.; et al. The ASCAT Soil Moisture Product: A Review of Its Specifications, Validation Results, and Emerging Applications. Meteorol. Z. 2013, 22, 5–33. [Google Scholar] [CrossRef]
- Kim, S.; Liu, Y.Y.; Johnson, F.M.; Parinussa, R.M.; Sharma, A. A Global Comparison of Alternate AMSR2 Soil Moisture Products: Why Do They Differ? Remote Sens. Environ. 2015, 161, 43–62. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Al-Yaari, A.; Rodriguez-Fernandez, N.; Parrens, M.; Molero, B.; Leroux, D.; Bircher, S.; Mahmoodi, A.; Mialon, A.; Richaume, P.; et al. Overview of SMOS Performance in Terms of Global Soil Moisture Monitoring after Six Years in Operation. Remote Sens. Environ. 2016, 180, 40–63. [Google Scholar] [CrossRef]
- Owe, M.; de Jeu, R.; Holmes, T. Multisensor Historical Climatology of Satellite-Derived Global Land Surface Moisture. J. Geophys. Res. Earth Surf. 2008, 113. [Google Scholar] [CrossRef]
- Liu, Y.Y.; Dorigo, W.A.; Parinussa, R.M.; De Jeu, R.A.M.; Wagner, W.; McCabe, M.F.; Evans, J.P.; Van Dijk, A.I.J.M. Trend-Preserving Blending of Passive and Active Microwave Soil Moisture Retrievals. Remote Sens. Environ. 2012, 123, 280–297. [Google Scholar] [CrossRef]
- Chen, F. The Noah Land Surface Model in WRF: A Short Tutorial. In Proceedings of the NCAR LSM Group Meeting, Champaign, IL, USA, 17 April 2007. [Google Scholar]
- Malbéteau, Y.; Merlin, O.; Balsamo, G.; Er-Raki, S.; Khabba, S.; Walker, P.; Jarlan, L. Toward a Surface Soil Moisture Product at High Spatiotemporal Resolution: Temporally Interpolated, Spatially Disaggregated SMOS Data. J. Hydrometeorol. 2018, 19, 183–200. [Google Scholar] [CrossRef]
- El Hajj, M.; Baghdadi, N.; Zribi, M. Comparative Analysis of the Accuracy of Surface Soil Moisture Estimation from the C- and L-Bands. Int. J. Appl. Earth Obs. Geoinf. 2019, 82, 101888. [Google Scholar] [CrossRef]
- Baghdadi, N.; Zribi, M. Microwave Remote Sensing of Land Surfaces: Techniques and Methods; Elsevier: Amsterdam, The Netherlands, 2016; 448p. [Google Scholar]
- Baghdadi, N.N.; El Hajj, M.; Zribi, M.; Fayad, I. Coupling SAR C-Band and Optical Data for Soil Moisture and Leaf Area Index Retrieval over Irrigated Grasslands. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 1229–1243. [Google Scholar] [CrossRef]
- Gao, Q.; Zribi, M.; Escorihuela, M.J.; Baghdadi, N. Synergetic Use of Sentinel-1 and Sentinel-2 Data for Soil Moisture Mapping at 100 m Resolution. Sensors 2017, 17, 1966. [Google Scholar] [CrossRef] [PubMed]
- Benabdelouahab, T.; Derauw, D.; Lionboui, H.; Hadria, R.; Tychon, B.; Boudhar, A.; Balaghi, R.; Lebrini, Y.; Maaroufi, H.; Barbier, C. Using SAR Data to Detect Wheat Irrigation Supply in an Irrigated Semi-Arid Area. J. Agric. Sci. 2018, 11, 21. [Google Scholar] [CrossRef]
- Le Page, M.; Nguyen, T.; Zribi, M.; Boone, A.; Dari, J.; Modanesi, S.; Zappa, L.; Ouaadi, N.; Jarlan, L. Irrigation Timing Retrieval at the Plot Scale Using Surface Soil Moisture Derived from Sentinel Time Series in Europe. Remote Sens. 2023, 15, 1449. [Google Scholar] [CrossRef]
- Le Page, M.; Jarlan, L.; El Hajj, M.M.; Zribi, M.; Baghdadi, N.; Boone, A. Potential for the Detection of Irrigation Events on Maize Plots Using Sentinel-1 Soil Moisture Products. Remote Sens. 2020, 12, 1621. [Google Scholar] [CrossRef]
- Ouaadi, N.; Jarlan, L.; Khabba, S.; Ezzahar, J.; Le Page, M.; Merlin, O. Irrigation Amounts and Timing Retrieval through Data Assimilation of Surface Soil Moisture into the Fao-56 Approach in the South Mediterranean Region. Remote Sens. 2021, 13, 2667. [Google Scholar] [CrossRef]
- Aubert, M.; Baghdadi, N.; Zribi, M.; Douaoui, A.; Loumagne, C.; Baup, F.; El Hajj, M.; Garrigues, S. Analysis of TerraSAR-X Data Sensitivity to Bare Soil Moisture, Roughness, Composition and Soil Crust. Remote Sens. Environ. 2011, 115, 1801–1810. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave Remote Sensing: Active and Passive, Volume III, Volume Scattering and Emission Theory, Advanced Systems and Applications; Artech House Inc.: Dedham, MA, USA; Norwood, MA, USA, 1986. [Google Scholar]
- El Hajj, M.; Baghdadi, N.; Zribi, M.; Bazzi, H. Synergic Use of Sentinel-1 and Sentinel-2 Images for Operational Soil Moisture Mapping at High Spatial Resolution over Agricultural Areas. Remote Sens. 2017, 9, 1292. [Google Scholar] [CrossRef]
- El Hajj, M.; Baghdadi, N.; Belaud, G.; Zribi, M.; Cheviron, B.; Courault, D.; Hagolle, O.; Charron, F. Irrigated Grassland Monitoring Using a Time Series of TerraSAR-X and COSMO-SkyMed X-Band SAR Data. Remote Sens. 2014, 6, 10002–10032. [Google Scholar] [CrossRef]
- El Hajj, M.; Baghdadi, N.; Bazzi, H.; Zribi, M. Penetration Analysis of SAR Signals in the C and L Bands for Wheat, Maize, and Grasslands. Remote Sens. 2019, 11, 31. [Google Scholar] [CrossRef]
- Hamze, M.; Baghdadi, N.; El Hajj, M.M.; Zribi, M.; Bazzi, H.; Cheviron, B.; Faour, G. Integration of L-Band Derived Soil Roughness into a Bare Soil Moisture Retrieval Approach from c-Band Sar Data. Remote Sens. 2021, 13, 2102. [Google Scholar] [CrossRef]
- López-Cedrón, F.X.; Boote, K.J.; Piñeiro, J.; Sau, F. Improving the CERES-Maize Model Ability to Simulate Water Deficit Impact on Maize Production and Yield Components. Agron. J. 2008, 100, 296–307. [Google Scholar] [CrossRef]
- Hook, J.E. Using Crop Models to Plan Water Withdrawals for Irrigation in Drought Years. Agric. Syst. 1994, 45, 271–289. [Google Scholar] [CrossRef]
- Garrison, M.V.; Batchelor, W.D.; Kanwar, R.S.; Ritchie, J.T. Evaluation of the CERES-Maize Water and Nitrogen Balances under Tile-Drained Conditions. Agric. Syst. 1999, 62, 189–200. [Google Scholar] [CrossRef]
- Steduto, P.; Hsiao, T.C.; Raes, D.; Fereres, E. Aquacrop-the FAO Crop Model to Simulate Yield Response to Water: I. Concepts and Underlying Principles. Agron. J. 2009, 101, 426–437. [Google Scholar] [CrossRef]
- Brisson, N.; Gary, C.; Justes, E.; Roche, R.; Mary, B.; Ripoche, D.; Zimmer, D.; Sierra, J.; Bertuzzi, P.; Burger, P.; et al. An Overview of the Crop Model STICS. Eur. J. Agron. 2003, 18, 309–332. [Google Scholar] [CrossRef]
- Duchemin, B.; Boulet, G.; Maisongrande, P.; Benhadj, I.; Hadria, R.; Khabba, S.; Chehbouni, A.; Ezzahar, J.; Olioso, A. Un Modèle Simplifié Pour l’estimation Du Rendement de Cultures Céréalières En Milieu Semi-Aride. In Proceedings of the Un Modèle Simplidié Pour L’estimation du Bilan Hydrique et du Rendement de Cultures Céréalières en Milieu Semi-Aride, Marrakech, Morocco, 14–17 November 2005. [Google Scholar]
- Cheviron, B.; Vervoort, R.W.; Albasha, R.; Dairon, R.; Le Priol, C.; Mailhol, J.C. A Framework to Use Crop Models for Multi-Objective Constrained Optimization of Irrigation Strategies. Environ. Model. Softw. 2016, 86, 145–157. [Google Scholar] [CrossRef]
- Silvestro, P.C.; Pignatti, S.; Yang, H.; Yang, G.; Pascucci, S.; Castaldi, F.; Casa, R. Sensitivity Analysis of the Aquacrop and SAFYE Crop Models for the Assessment of Water Limited Winter Wheat Yield in Regional Scale Applications. PLoS ONE 2017, 12, e0187485. [Google Scholar] [CrossRef] [PubMed]
- Duchemin, B.; Maisongrande, P.; Boulet, G.; Benhadj, I. A Simple Algorithm for Yield Estimates: Evaluation for Semi-Arid Irrigated Winter Wheat Monitored with Green Leaf Area Index. Environ. Model. Softw. 2008, 23, 876–892. [Google Scholar] [CrossRef]
- Castañeda-Vera, A.; Leffelaar, P.A.; Álvaro-Fuentes, J.; Cantero-Martínez, C.; Mínguez, M.I. Selecting Crop Models for Decision Making in Wheat Insurance. Eur. J. Agron. 2015, 68, 97–116. [Google Scholar] [CrossRef]
- Mailhol, J.C.; Albasha, R.; Cheviron, B.; Lopez, J.M.; Ruelle, P.; Dejean, C. The PILOTE-N Model for Improving Water and Nitrogen Management Practices: Application in a Mediterranean Context. Agric. Water Manag. 2018, 204, 162–179. [Google Scholar] [CrossRef]
- Varella, H.; Buis, S.; Launay, M.; Guérif, M. Global Sensitivity Analysis for Choosing the Main Soil Parameters of a Crop Model to Be Determined. Agric. Sci. 2012, 3, 949–961. [Google Scholar] [CrossRef]
- Guerra, L.C.; Garcia y Garcia, A.; Hook, J.E.; Harrison, K.A.; Thomas, D.L.; Stooksbury, D.E.; Hoogenboom, G. Irrigation Water Use Estimates Based on Crop Simulation Models and Kriging. Agric. Water Manag. 2007, 89, 199–207. [Google Scholar] [CrossRef]
- Mailhol, J.C.; Olufayo, A.A.; Ruelle, P. Sorghum and Sunflower Evapotranspiration and Yield from Simulated Leaf Area Index. Agric. Water Manag. 1997, 35, 167–182. [Google Scholar] [CrossRef]
- Mailhol, J.C.; Ruelle, P.; Walser, S.; Schütze, N.; Dejean, C. Analysis of AET and Yield Predictions under Surface and Buried Drip Irrigation Systems Using the Crop Model PILOTE and Hydrus-2D. Agric. Water Manag. 2011, 98, 1033–1044. [Google Scholar] [CrossRef]
- Liu, X.; Yang, D. Irrigation Schedule Analysis and Optimization under the Different Combination of P and ET0 Using a Spatially Distributed Crop Model. Agric. Water Manag. 2021, 256, 107084. [Google Scholar] [CrossRef]
- Dokoohaki, H.; Miguez, F.E.; Archontoulis, S.; Laird, D. Use of Inverse Modelling and Bayesian Optimization for Investigating the Effect of Biochar on Soil Hydrological Properties. Agric. Water Manag. 2018, 208, 268–274. [Google Scholar] [CrossRef]
- Jin, X.; Kumar, L.; Li, Z.; Feng, H.; Xu, X.; Yang, G.; Wang, J. A Review of Data Assimilation of Remote Sensing and Crop Models. Eur. J. Agron. 2018, 92, 141–152. [Google Scholar] [CrossRef]
- Kivi, M.S.; Blakely, B.; Masters, M.; Bernacchi, C.J.; Miguez, F.E.; Dokoohaki, H. Development of a Data-Assimilation System to Forecast Agricultural Systems: A Case Study of Constraining Soil Water and Soil Nitrogen Dynamics in the APSIM Model. Sci. Total Environ. 2022, 820, 153192. [Google Scholar] [CrossRef]
- Huang, J.; Gómez-Dans, J.L.; Huang, H.; Ma, H.; Wu, Q.; Lewis, P.E.; Liang, S.; Chen, Z.; Xue, J.H.; Wu, Y.; et al. Assimilation of Remote Sensing into Crop Growth Models: Current Status and Perspectives. Agric. For. Meteorol. 2019, 276–277, 107609. [Google Scholar]
- Zhou, H.; Geng, G.; Yang, J.; Hu, H.; Sheng, L.; Lou, W. Improving Soil Moisture Estimation via Assimilation of Remote Sensing Product into the DSSAT Crop Model and Its Effect on Agricultural Drought Monitoring. Remote Sens. 2022, 14, 3187. [Google Scholar] [CrossRef]
- Peng, J.; Albergel, C.; Balenzano, A.; Brocca, L.; Cartus, O.; Cosh, M.H.; Crow, W.T.; Dabrowska-Zielinska, K.; Dadson, S.; Davidson, M.W.J.; et al. A Roadmap for High-Resolution Satellite Soil Moisture Applications—Confronting Product Characteristics with User Requirements. Remote Sens. Environ. 2021, 252, 112162. [Google Scholar]
- Weiss, M.; Jacob, F.; Duveiller, G. Remote Sensing for Agricultural Applications: A Meta-Review. Remote Sens. Environ. 2020, 236, 111402. [Google Scholar] [CrossRef]
- Curnel, Y.; de Wit, A.J.W.; Duveiller, G.; Defourny, P. Potential Performances of Remotely Sensed LAI Assimilation in WOFOST Model Based on an OSS Experiment. Agric. Meteorol. 2011, 151, 1843–1855. [Google Scholar] [CrossRef]
- Dente, L.; Satalino, G.; Mattia, F.; Rinaldi, M. Assimilation of Leaf Area Index Derived from ASAR and MERIS Data into CERES-Wheat Model to Map Wheat Yield. Remote Sens. Environ. 2008, 112, 1395–1407. [Google Scholar] [CrossRef]
- Huang, J.; Ma, H.; Su, W.; Zhang, X.; Huang, Y.; Fan, J.; Wu, W. Jointly Assimilating MODIS LAI and et Products into the SWAP Model for Winter Wheat Yield Estimation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 4060–4071. [Google Scholar] [CrossRef]
- Jongschaap, R.E.E.; Schouten, L.S.M. Predicting Wheat Production at Regional Scale by Integration of Remote Sensing Data with a Simulation Model. Agron. Sustain. Dev. 2005, 25, 481–489. [Google Scholar] [CrossRef]
- Kivi, M.; Vergopolan, N.; Dokoohaki, H. A Comprehensive Assessment of in Situ and Remote Sensing Soil Moisture Data Assimilation in the APSIM Model for Improving Agricultural Forecasting across the US Midwest. Hydrol. Earth Syst. Sci. 2023, 27, 1173–1199. [Google Scholar] [CrossRef]
- Allen, R.G.; Pereira, L.S.; Raes, D.; Smith, M. Crop Evapotranspiration—Guidelines for Computing Crop Water Requirements—FAO Irrigation and Drainage Paper 56; Irrigation and Drainage; FAO: Rome, Italy, 1998. [Google Scholar] [CrossRef]
- Huang, J.; Tian, L.; Liang, S.; Ma, H.; Becker-Reshef, I.; Huang, Y.; Su, W.; Zhang, X.; Zhu, D.; Wu, W. Improving Winter Wheat Yield Estimation by Assimilation of the Leaf Area Index from Landsat TM and MODIS Data into the WOFOST Model. Agric. Meteorol. 2015, 204, 106–121. [Google Scholar] [CrossRef]
- de Wit, A.J.W.; van Diepen, C.A. Crop Model Data Assimilation with the Ensemble Kalman Filter for Improving Regional Crop Yield Forecasts. Agric. Meteorol. 2007, 146, 38–56. [Google Scholar] [CrossRef]
- Huang, J.; Sedano, F.; Huang, Y.; Ma, H.; Li, X.; Liang, S.; Tian, L.; Zhang, X.; Fan, J.; Wu, W. Assimilating a Synthetic Kalman Filter Leaf Area Index Series into the WOFOST Model to Improve Regional Winter Wheat Yield Estimation. Agric. Meteorol. 2016, 216, 188–202. [Google Scholar] [CrossRef]
- Ines, A.V.M.; Das, N.N.; Hansen, J.W.; Njoku, E.G. Assimilation of Remotely Sensed Soil Moisture and Vegetation with a Crop Simulation Model for Maize Yield Prediction. Remote Sens. Environ. 2013, 138, 149–164. [Google Scholar] [CrossRef]
- Cheviron, B.; Serra-Wittling, C.; Delmas, M.; Belaud, G.; Molle, G.; Dominguez-Bohorquez, J.-D. Irrigation Efficiency and Optimization: The Optirrig Model. In Proceedings of the 22nd EGU General Assembly, Online, 4–8 May 2020. [Google Scholar]
- Cantelaube, P.; Carles, M. Le Registre Parcellaire Graphique: Des Données Géographiques Pour Décrire La Couverture Du Sol Agricole. Le Cahier des Techniques de l’INRA. 2015, pp. 58–64. Available online: https://www.researchgate.net/publication/277326400 (accessed on 9 November 2022).
- Soil Survey Manual Soil Survey Manual (SSM)|NRCS Soils; USDA: Washington, DC, USA, 2017.
- Kettler, T.A.; Doran, J.W.; Gilbert, T.L. Simplified Method for Soil Particle-Size Determination to Accompany Soil-Quality Analyses. Soil Sci. Soc. Am. J. 2001, 65, 849–852. [Google Scholar] [CrossRef]
- Bazzi, H.; Baghdadi, N.; El Hajj, M.; Zribi, M. Potential of Sentinel-1 Surface Soil Moisture Product for Detecting Heavy Rainfall in the South of France. Sensors 2019, 19, 802. [Google Scholar] [CrossRef]
- Inglada, J.; Vincent, A.; Arias, M.; Tardy, B.; Morin, D.; Rodes, I. Operational High Resolution Land Cover Map Production at the Country Scale Using Satellite Image Time Series. Remote Sens. 2017, 9, 95. [Google Scholar] [CrossRef]
- Attema, E.P.W.; Ulaby, F.T. Vegetation Modeled as a Water Cloud. Radio Sci. 1978, 13, 357–364. [Google Scholar] [CrossRef]
- Fung, A.K. Microwave Scattering and Emission Models and Their Applications; Artech House Publishers: Norwood, MA, USA, 1994. [Google Scholar]
- Baghdadi, N.; Abou Chaaya, J.; Zribi, M. Semiempirical Calibration of the Integral Equation Model for SAR Data in C-Band and Cross Polarization Using Radar Images and Field Measurements. IEEE Geosci. Remote Sens. Lett. 2011, 8, 14–18. [Google Scholar] [CrossRef]
- Baghdadi, N.; King, C.; Chanzy, A.; Wigneron, J.P. An Empirical Calibration of the Integral Equation Model Based on SAR Data, Soil Moisture and Surface Roughness Measurement over Bare Soils. Int. J. Remote Sens. 2002, 23, 4325–4340. [Google Scholar] [CrossRef]
- Bich, W.; Cox, M.G.; Dybkaer, R.; Elster, C.; Estler, W.T.; Hibbert, B.; Imai, H.; Kool, W.; Michotte, C.; Nielsen, L.; et al. Revision of the “Guide to the Expression of Uncertainty in Measurement”. Metrologia 2012, 49, 702–705. [Google Scholar] [CrossRef]
- Friesen, J.; Steele-Dunne, S.C.; Van De Giesen, N. Diurnal Differences in Global Ers Scatterometer Backscatter Observations of the Land Surface. IEEE Trans. Geosci. Remote Sens. 2012, 50, 2595–2602. [Google Scholar] [CrossRef]
- Van Emmerik, T.; Steele-Dunne, S.C.; Judge, J.; Van De Giesen, N. Impact of Diurnal Variation in Vegetation Water Content on Radar Backscatter from Maize During Water Stress. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3855–3869. [Google Scholar] [CrossRef]
- Jiang, X.; Kang, S.; Tong, L.; Li, S.; Ding, R.; Du, T. Modeling Evapotranspiration and Its Components of Maize for Seed Production in an Arid Region of Northwest China Using a Dual Crop Coefficient and Multisource Models. Agric. Water Manag. 2019, 222, 105–117. [Google Scholar] [CrossRef]
- Mutuku, E.A.; Roobroeck, D.; Vanlauwe, B.; Boeckx, P.; Cornelis, W.M. Maize Production under Combined Conservation Agriculture and Integrated Soil Fertility Management in the Sub-Humid and Semi-Arid Regions of Kenya. Field Crops Res. 2020, 254, 107833. [Google Scholar] [CrossRef]
- Liman Harou, I.; Whitney, C.; Kung’u, J.; Luedeling, E. Crop Modelling in Data-Poor Environments—A Knowledge-Informed Probabilistic Approach to Appreciate Risks and Uncertainties in Flood-Based Farming Systems. Agric. Syst. 2021, 187, 103014. [Google Scholar] [CrossRef]
- Challinor, A.J.; Müller, C.; Asseng, S.; Deva, C.; Nicklin, K.J.; Wallach, D.; Vanuytrecht, E.; Whitfield, S.; Ramirez-Villegas, J.; Koehler, A.K. Improving the Use of Crop Models for Risk Assessment and Climate Change Adaptation. Agric. Syst. 2018, 159, 296–306. [Google Scholar] [CrossRef]
- Peng, J.; Loew, A.; Merlin, O.; Verhoest, N.E.C. A Review of Spatial Downscaling of Satellite Remotely Sensed Soil Moisture. Rev. Geophys. 2017, 55, 341–366. [Google Scholar] [CrossRef]
- Dokoohaki, H.; Kivi, M.S.; Martinez-Feria, R.; Miguez, F.E.; Hoogenboom, G. A Comprehensive Uncertainty Quantification of Large-Scale Process-Based Crop Modeling Frameworks. Environ. Res. Lett. 2021, 16, 084010. [Google Scholar] [CrossRef]
- Sebastian, D.E.; Murtugudde, R.; Ghosh, S. Soil–Vegetation Moisture Capacitor Maintains Dry Season Vegetation Productivity over India. Sci. Rep. 2023, 13, 888. [Google Scholar] [CrossRef] [PubMed]
- Dong, Z.; Hu, H.; Wei, Z.; Liu, Y.; Xu, H.; Yan, H.; Chen, L.; Li, H.; Khan, M.Y.A. Estimating the Actual Evapotranspiration of Different Vegetation Types Based on Root Distribution Functions. Front. Earth Sci. 2022, 10, 893388. [Google Scholar] [CrossRef]
- Wu, B.; Zhang, M.; Zeng, H.; Tian, F.; Potgieter, A.B.; Qin, X.; Yan, N.; Chang, S.; Zhao, Y.; Dong, Q.; et al. Challenges and Opportunities in Remote Sensing-Based Crop Monitoring: A Review. Natl. Sci. Rev. 2022, 10, nwac290. [Google Scholar] [CrossRef] [PubMed]
- Ferrant, S.; Selles, A.; Le Page, M.; Herrault, P.A.; Pelletier, C.; Al-Bitar, A.; Mermoz, S.; Gascoin, S.; Bouvet, A.; Saqalli, M.; et al. Detection of Irrigated Crops from Sentinel-1 and Sentinel-2 Data to Estimate Seasonal Groundwater Use in South India. Remote Sens. 2017, 9, 1119. [Google Scholar] [CrossRef]
- Nie, W.; Kumar, S.V.; Bindlish, R.; Liu, P.W.; Wang, S. Remote Sensing-Based Vegetation and Soil Moisture Constraints Reduce Irrigation Estimation Uncertainty. Environ. Res. Lett. 2022, 17, 084010. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plot | Year | Month | Tavg (°C) | Avg-Rg (MJm−2d−1) | Monthly R (mm) | Monthly ETo (mm) |
|---|---|---|---|---|---|---|
| P1 | 2017 | April | 17.6 | 20.75 | 39.5 | 93.7 |
| May | 23.1 | 24.1 | 27.4 | 131.2 | ||
| June | 28.7 | 25.97 | 73.2 | 166.3 | ||
| July | 28.3 | 26.06 | 4.7 | 182.2 | ||
| August | 30.9 | 20.84 | 8.9 | 145.1 | ||
| September | 23.6 | 16.31 | 6.5 | 93.9 | ||
| P2 | 2018 | April | 12.6 | 15.0 | 142.7 | 76.8 |
| May | 14.0 | 15.8 | 71.4 | 88.7 | ||
| June | 18.6 | 17.9 | 180.0 | 112.3 | ||
| July | 21.4 | 21.3 | 160.2 | 137.3 | ||
| August | 20.5 | 18.9 | 81.4 | 110.6 | ||
| September | 18.7 | 16.6 | 48.2 | 82.1 | ||
| October | 12.5 | 10.2 | 69.8 | 37.1 | ||
| P3 | 2019 | May | 26.3 | 20.3 | 117.8 | 104.3 |
| June | 35.4 | 22.1 | 65.6 | 127.9 | ||
| July | 36.6 | 21.2 | 100.8 | 133.4 | ||
| August | 32 | 18.8 | 119 | 109.2 | ||
| September | 29.3 | 16.5 | 57.6 | 78.1 | ||
| October | 31.4 | 9.5 | 91.6 | 37.8 | ||
| P4 | 2020 | April | 23.7 | 15.6 | 159.2 | 78.2 |
| May | 29 | 21.5 | 77.6 | 120.6 | ||
| June | 31.6 | 19.1 | 100.6 | 111.1 | ||
| July | 36.1 | 20.8 | 11.8 | 127.8 | ||
| August | 36.2 | 18.9 | 62.2 | 110.2 | ||
| September | 33.7 | 15.7 | 101 | 80.5 |
| Region | Year | Plot | Number of Irrigations | Average Amount Per Irrigation | Sowing Date | Period of Irrigation | Harvest Date | Irrigation Method |
|---|---|---|---|---|---|---|---|---|
| Montpellier | 2017 | P1 | 10 | 30 mm | 15 April | 2 June– 26 September | 25 September | Sprinkler |
| Tarbes | 2018 | P2 | 4 | 40 mm | 20 April | 27 June– 5 August | 6 October | Sprinkler |
| Tarbes | 2019 | P3 | 4 | 40 mm | 01 May | 1 July– 29 July | 1 October | Sprinkler |
| Tarbes | 2020 | P4 | 3 | 40 mm | 08 May | 9 July– 6 August | 30 September | Sprinkler |
| Category | Name | Description | P1 | P2/P3/P4 | Range | Unit | |
|---|---|---|---|---|---|---|---|
| Parameters | Temperature | Ti | Temperature sum for root installation | 150 | 150 | ±7.5% | °C |
| Tm | Temperature sum to reach the maximum LAI | 1300 | 1300 | ±5% | °C | ||
| Tmat | Temperature sum for crop maturity | 2050 | 2050 | ±5% | °C | ||
| Ts | Temperature sum for crop emergence | 100 | 100 | ±10% | °C | ||
| Ts1 | Temperature sum for the 1st critical stage | 900 | 900 | ±10% | °C | ||
| Ts2 | Temperature sum for the 2nd critical stage | 1700 | 1700 | ±10% | °C | ||
| Soil | Kru | Easily usable reserve/field capacity | 0.66 | 0.68 | ±7.5% | - | |
| Pmax | Maximum profile and rooting depth | 1.20 | 1.10 | ±7.5% | m | ||
| Vr | Root growth rate | 1.50 | 1.50 | ±10% | cm·d−1 | ||
| θfc | Field capacity | 0.29 | 0.26 | ±7.5% | - | ||
| θwp | Wilting point | 0.12 | 0.10 | ±7.5% | - | ||
| Plant | aw | Controls the decrease of HI for low LAI values | 0.12 | 0.12 | ±10% | - | |
| HIpot | Potential harvest index (HI) | 0.52 | 0.52 | ±7.5% | - | ||
| Kcmax | Maximum value for crop coefficient (Kc) | 1.20 | 1.20 | ±10% | - | ||
| LAImax | Maximum LAI value | 5.00 | 4.50 | ±7.5% | - | ||
| LAIopt | Supposed HI-optimal LAI value | 2.50 | 2.50 | ±10% | - | ||
| Ghu | Percentage of grain humidity | 15 | 15 | ±33% | - | ||
| RUE | Radiation use efficiency | 1.35 | 1.35 | ±7.5% | - | ||
| α1 | First shape parameter for LAI curves | 2.50 | 2.50 | ±15% | - | ||
| α2 | Second shape parameter for LAI curves | 1.00 | 1.00 | ±15% | - | ||
| β | Third shape parameter for LAI curves | 2.50 | 2.50 | ±15% | - | ||
| λ | Harmfulness of the water stress | 1.25 | 1.10 | ±10% | - | ||
| Management | - | Irrigation dose (applied at each irrigation) | 30 | 40 | 20–40 | mm | |
| - | Dose applied at sowing | 30 | 40 | 25–35 | mm | ||
| - | Soil reserve when starting the simulation | 300 | 500 | Fixed | mm | ||
| - | Period allowed for irrigation (in days after sowing) | 140 | 115 | 120–160 | - | ||
| - | Mulch effect | 0 | 0 | 0–1 | - | ||
| - | Sowing day | 105 | 121 | 104–124 | - | ||
| - | Water reserve ratio that triggers irrigation | 70 | 68 | 53–72 | % | ||
| Variables | Crop development | TT | Sum of temperature | - | - | 0.0–2250.0 | °C |
| Kc | Crop coefficient | - | - | 0.0–1.0 | - | ||
| Cp | Partition crop coefficient | - | - | 0.0–0.85 | - | ||
| Tp | Crop transpiration | - | - | 0.0–8.5 | mm·d−1 | ||
| Tp0 | Potential crop transpiration | - | - | 0.0–9.6 | mm·d−1 | ||
| HI | Harvest index | - | - | 0.4–0.61 | - | ||
| Water budget | R1 | Water reservoir of the first soil layer | - | - | 4.0–30.0 | mm | |
| R2 | Water reservoir of the second soil layer | - | - | 45.0–204.0 | mm | ||
| R3 | Water reservoir of the third soil layer | - | - | 0.0–206.0 | mm | ||
| Sλw | Water stress index | - | - | 0.0–1.0 | - | ||
| Es | Evaporation | - | - | 0.0–1.9 | mm·d−1 | ||
| Es0 | Potential evaporation | - | - | 0.2–2.5 | mm·d−1 |
| Indicator | Description |
|---|---|
| SSM value at the plot scale | |
| SSM value at grid scale over plot’s area (10 km) | |
| SSM simulated by Optirrig with the absence of irrigation | |
| SSM simulated by Optirrig through the injection of I(j,k) (irrigation of date j between t(l) and t(i) and dose k) | |
| Rate of change between and | |
| Rate of change between and | |
| Rate of change between and | |
| Rate of change between and | |
| Uncertainty in the values |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hamze, M.; Cheviron, B.; Baghdadi, N.; Courault, D.; Zribi, M. Plot-Scale Irrigation Dates and Amount Detection Using Surface Soil Moisture Derived from Sentinel-1 SAR Data in the Optirrig Crop Model. Remote Sens. 2023, 15, 4081. https://doi.org/10.3390/rs15164081
Hamze M, Cheviron B, Baghdadi N, Courault D, Zribi M. Plot-Scale Irrigation Dates and Amount Detection Using Surface Soil Moisture Derived from Sentinel-1 SAR Data in the Optirrig Crop Model. Remote Sensing. 2023; 15(16):4081. https://doi.org/10.3390/rs15164081
Chicago/Turabian StyleHamze, Mohamad, Bruno Cheviron, Nicolas Baghdadi, Dominique Courault, and Mehrez Zribi. 2023. "Plot-Scale Irrigation Dates and Amount Detection Using Surface Soil Moisture Derived from Sentinel-1 SAR Data in the Optirrig Crop Model" Remote Sensing 15, no. 16: 4081. https://doi.org/10.3390/rs15164081
APA StyleHamze, M., Cheviron, B., Baghdadi, N., Courault, D., & Zribi, M. (2023). Plot-Scale Irrigation Dates and Amount Detection Using Surface Soil Moisture Derived from Sentinel-1 SAR Data in the Optirrig Crop Model. Remote Sensing, 15(16), 4081. https://doi.org/10.3390/rs15164081