Abstract
Due to the limited transmission gain of ubiquitous radar systems, it has become necessary to use a long-time coherent integration method for range-Doppler (RD) analysis. However, when the target exhibits high-speed and high-maneuver capabilities, it introduces challenges, such as range migration (RM), Doppler frequency migration (DFM), and velocity ambiguity (VA) in the RD domain, thus posing significant difficulties in target detection and tracking. Moreover, the presence of VA further complicates the problem. To address these complexities while maintaining integration efficiency, this study proposes a hybrid integration approach. First, methods called Keystone-transform (KT) and matched filtering processing (MFP) are proposed for compensating for range migration (RM) and velocity ambiguity (VA) in Radar Detection (RD) images. The KT approach is employed to compensate for RM, followed by the generation of matched filters with varying ambiguity numbers. Subsequently, MFP enables the production of multiple RD images covering different but contiguous Doppler frequency ranges. These RD images can be compiled into an extended RD (ERD) image that exhibits an expanded Doppler frequency range. Second, an improved particle-filter (IPF) algorithm is raised to perform incoherent integration among ERD images and to achieve track-before-detect (TBD) for a target. In the IPF, the target state vector is augmented with ambiguous numbers, which are estimated via maximum posterior probability estimation. Then, to compensate for the DFM, a line spread model (LSM) is proposed instead of the point spread model (PSM) used in traditional PF. To evaluate the efficacy of the proposed method, a radar simulator is devised, encompassing comprehensive radar signal processing. The findings demonstrate that the proposed approach achieves a harmonious equilibrium between integration efficiency and computational complexity when it comes to detecting and tracking high-speed and high-maneuvering targets with intricate maneuvers. Furthermore, the algorithm’s effectiveness is authenticated by exploiting ubiquitous radar data.
1. Introduction
Ubiquitous radar is also referred to as holographic staring radar or floodlight radar [1,2,3]. In 2017, the IEEE Radar Definition Standard gave the first definition of ubiquitous radar, which is a radar that looks everywhere all the time and performs multiple functions simultaneously instead of sequentially [4]. Ubiquitous radar employs a wide-beam transmitting antenna to uniformly irradiate a wide area with transmitted signal energy. On the receiving end, a digital array antenna incorporates digital beam forming (DBF) technology to obtain multiple narrow beams that cover the entire transmitting area simultaneously. This enables uninterrupted monitoring and detection of the entirety of the airspace under surveillance. Ubiquitous radar adopts the long-time coherent accumulation (LTCA) technique [5], which can improve the radar transmission power utilization, enhance the detection performance, and improve the target information acquisition ability under the same power aperture conditions. However, during the LTCA process, the motion characteristics of the high-speed and high-maneuvering target result in range migration (RM), Doppler frequency migration (DFM), and velocity ambiguity (VA), which can degrade the performance of coherent accumulation and seriously affect the subsequent tracking.
Currently, extensive research is being conducted on compensating for target movement in the LTCA process. In this regard, Keystone transform (KT) has emerged as a widely used method for compensating reference motion (RM) [6,7,8]. Additionally, both Radon Fourier Transform (RFT) [9,10,11] and Generalized Radon Fourier Transform (GRFT) [12] have been proposed to compensate for first-order RM and high-order RM, respectively. Furthermore, numerous algorithms, such as the Keystone-Transform and Lv’s distribution (KT-LVD) [13], Radon-Lv’s distribution (RLVD) [14], and Radon-Fractional Fourier Transform (RFRFT) [15], have been developed to compensate for RM and Doppler frequency modulation (DFM) in targets exhibiting uniformly accelerated motion. These methodologies offer invaluable remedies for mitigating the detrimental impact of motion-induced artifacts in the LTCA process. Nevertheless, it is essential to note that these computational algorithms necessitate a substantial amount of processing power. There are some hybrid integration algorithms, consisting of coherent and incoherent integration, that can reduce computational complexity, but they often come at the cost of significantly reducing integration gain [16,17,18].
The track-before-detect (TBD) method is capable of achieving incoherent integration. This method involves exploiting a signal processing algorithm to perform detections even when there is significant noise interference. Additionally, TBD establishes tracks for potential targets even before they are officially detected. This technique is used to improve the detection performance of radar systems in situations where the target signal is weak or difficult to distinguish from surrounding clutter or interference [19,20]. In contrast to the detect-before-track algorithm, which is a popular technique to track targets after the detection process [21], TBD does not need threshold the raw data for detection, it can operate detection and tracking jointly on the raw data [22]. Furthermore, the TBD can achieve a more robust detection via tracking all data up to the current time step, instead of depending solely on the current time step [23].
Numerous algorithms are available for implementing the TBD, which can be broadly classified into two categories: batch algorithms and recursive algorithms. Batch algorithms, such as the Hough transform (HT) algorithm [24,25] and dynamic programming (DP) algorithm [26,27,28], store and then process received data within a certain period of time, which implies that several scan times are required for making a more accurate result. This feature determines that these algorithms cannot be adapted to a maneuvering target. Furthermore, as a type of batch algorithm, the multi-frame (MF) algorithm can be applied for the TBD of maneuvering mobile targets [29,30,31].
Recursive algorithms predict and then update the estimation of the target state recursively, which is perfectly consistent with the full space and time domain coverage property of ubiquitous radar. As a typical recursive algorithm, a particle filter (PF) is usually chosen for implementing the TBD approach [32,33,34,35], as it provides a significant advantage for nonlinear and non-Gaussian filtering problems. PF-TBD was first proposed by Salmond [36], enjoying several advantages over previous approaches. In Salmond’s PF method, a variable is added to represent the target existence state into the state vector, which can cause the degradation of the particle group. Rutten [37] has improved the PF by formulating the target existence probability more efficiently.
The objective of this paper is to explore the application of a hybrid integration technique for effectively achieving simultaneous detection and tracking of a weak and maneuvering target in ubiquitous radar. The compensation for RM and VA occurs during coherent integration, while compensating for DFM occurs during incoherent integration. During the coherent integration step, compensation for the first-order RM is achieved by employing KT, followed by the application of matched filtering processing (MFP) to mitigate the effects arising from VA. In this step, each ambiguity number can be utilized to generate a corresponding matched filter. The use of different matched filters enables the creation of sub-RD images with distinct yet contiguous Doppler frequency ranges. These sub-RD images can then be combined to form an extended RD (ERD) image encompassing the entire Doppler frequency spectrum. In the incoherent integration step, an improved particle filter (IPF) is proposed and applied in ERD images to realize the TBD. In this approach, the IPF incorporates an ambiguous number in the target state vector, which can be estimated using maximum posterior probability. Furthermore, to compensate for the DFM, a line spread model (LSM) is proposed as a replacement for the traditional point spread model (PSM) used in conventional PFs [37]. The proposed method is named KT-MFP-IPF-TBD in this paper.
The experiments show that the IPF-TBD method has better detection and tracking performance compared to the traditional PF-TBD method, and The integration gain of the KT-MFP-IPF-TBD method is close to LTCA, but its computational complexity is much lower than the LTCA.
The rest of this paper is organized as follows. Section 2 shows the deduction of ERD-image generation, including RM correction and VA compensation. Section 3 describes the IPF algorithm based on the Bayesian theory and presents a major implementation of the filter. Next, the simulation and measurement results are displayed and discussed in Section 4. Section 5 presents our conclusion.
2. Keystone-Transform and Matched Filter Processing
The transmission signal employed by the commonly used ubiquitous radar is characterized as a linear frequency modulated (LFM) signal.
where is the pulse width, is the frequency modulated rate, is the carrier frequency, is the slow time, denotes the pulse repetition interval (PRI), M is the number of coherent integrated pulses, t is the fast time, and
is a rectangle window function.
The received baseband signal can be stated as
where c is the light speed, is the amplitude, represents new fast time and is the instantaneous range between radar and target. is the integration time and is defined as
Assume that there is a moving target given an initial radial range at . Therefore the instantaneous radial range between the radar and a maneuvering target with constant acceleration can be written as
where and are defined as the radial velocity and acceleration of the target, respectively.
After the pulse compression in the range-frequency domain, the compressed signal can be expressed as
where is the amplitude and B is the bandwidth of the transmitted signal. Then, inserting (5) into (6), we have
However, for a fast-moving target, its Doppler frequency may exceed the pulse repetition frequency (PRF), according to [5], can be written as
where is the wavelength and is defined as . represents the baseband velocity and it satisfies . denotes the ambiguity number. After substituting (8) into (7), can be rewritten as
Consider the following equation:
can be further simplified as
In a number of works [38,39,40], the expression of KT is denoted as
where denotes the new slow-time variable.
Because , we can obtain
Therefore, (13) can be simplified as
According to (15), it can be inferred that despite the successful compensation of first-order RM, there still remains a linear RM induced by the ambiguity velocity (as indicated by the final term). Therefore, we can construct a matched filter to solve the residual coupled terms between f and .
where is the estimated value of the ambiguity number. After multiplying by in (15), one has
When , the VA can be compensated.
After performing the Inverse Fourier transform (IFT) of f in , we can obtain
where is the new amplitude. From (19), it shows that the combined product of and will introduce the DFM, which can lead to the spread of the target’s Doppler. Next, we can calculate the Fourier transform (FT) of based on the stationary phase principle [41,42].
where is the new amplitude. can be expressed as
From (20), the width of DFM is given as
In Figure 1, the RD images with DFM and without DFM are displayed. As the Doppler frequency of the target has broadened, the PSM is not applicable when there is DFM in RD image.
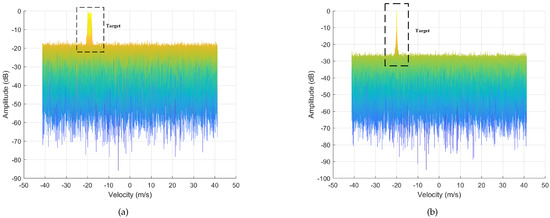
Figure 1.
Sub-RD imaging. (a) With DFM. (b) Without DFM.
According to the above description, each ambiguity number can produce a corresponding matched filter, different matched filters generate sub-RD images with different Doppler frequency ranges, which are defined as . Since they are consecutive, we can stitch them together to obtain an ERD image, as Figure 2 shows. represents the number of ambiguous numbers, which are odd. The velocity range of ERD images is given as . A simulation result of an ERD image with is shown in Figure 3. The substructures present in areas A, B, and C correspond to different values of , specifically , , and , respectively. When the ambiguity number is matched (area B), RM is small. In contrast, when the ambiguity number is not matched (area A and area C), RM becomes very large.
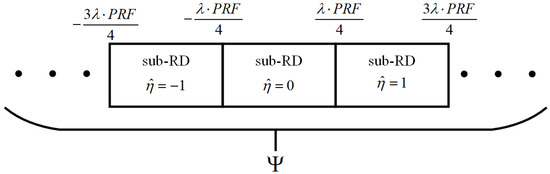
Figure 2.
Demonstration of stitching RD images.
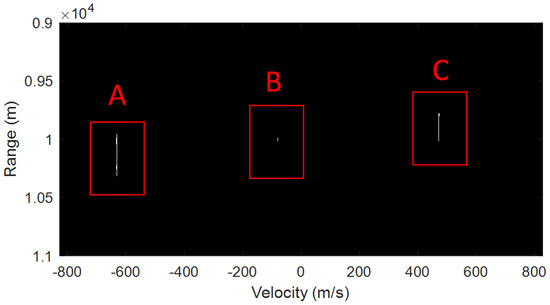
Figure 3.
Simulation of an ERD image.
Denote as the sampling interval, the length of pulse is . Hence, the size of the ERD image is .
3. Improved Particle Filter
3.1. The Target Motion Model
In a tracking system, the performance of the filter can be guaranteed when the target model matches the actual target motion. In this paper, the state vector of a target is given as:
where p is the time index, is ambiguity number, is radial distance, is the baseband radial velocity, is the radial acceleration and represents the intensity of the target at index p.
To simplify calculations, the state vector is rewritten as
where and .
Then the state-transition function is
where is the transition matrix and is the corresponding process noise input matrix. They can be defined as
and
represents the statistically independent, two-dimensional white Gaussian noise with zeros mean and its covariance matrix is
The variable describes the model uncertainties in the state-transition equation. Target tracking typically uses the maximum acceleration rate as its value. is the power spectral density of the noise in the rate of change in the target reflection amplitude.
The presence of the target at time p is described by a target existence variable , represents the target is alive, otherwise, . The probability of the target existence is modeled as a first-order Markov process and the corresponding probability transition matrix is
where is the probability of target birth and represents the probability of target death. Furthermore, is continuing probability.
3.2. Observation Model
Following the above description, we use the ERD images as the observation data. The measurement sets are
where n and k represent the index of the axes. is the value of the ERD image cell and can be expanded as
where is a contribution from the intensity of the target in the cell and is the measurement noise in the cell, which is a known Gaussian distribution with zeros mean, variance . Some paper use the PSM as [19]. In this paper, we propose a new spread function named LSM expressed in (32) and (33) to compensate the DFM.
While
While
where is a known parameter that controls the blurring. and are the length of each ERD cell in the range and the velocity axes. Figure 4 shows a example of .
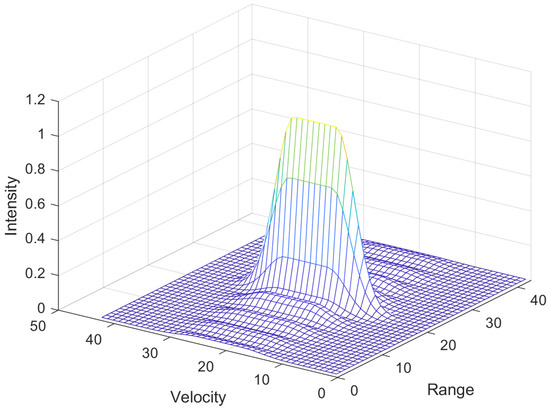
Figure 4.
The line spread model.
3.3. Filter Derivation
The filter estimates based on a set of all available measurements . In the Bayesian setting, the tracking problem can be transformed to a recursive approximation of the posterior probability density function (PDF) [43], , and thus can be split into two stages: prediction and update. We use the PF method proposed by Rutten [37], where the target existence is separated from the target state.
In (34), denotes the joint state densities and is the probability of target existence.
The joint state densities can be expanded as
where
and
The likelihood ratio in the formula is defined as:
From [37], We can obtain
where is the modified Bessel function with an order of zero [44]. The assumption is made that the noise in each bin is independent. Consequently, the complete likelihood function can be expressed as a product of all individual contributions from each bin.
The probability of existence is
where
and
3.4. Implementation of Improved Particle Filter
Sequential importance sampling (SIS) can be used to approximate the in (35), with an importance density function, , which is the first-order Markov chain. Assume the important density can be decomposed as follows:
The particle weights can be defined as
where ∝ denotes the proportionality.
If the importance density satisfies the following equations:
the weights of particles can be expressed as
where i is the index of particle.
The normalized weights of particles are
K represents the number of particles.
Nevertheless, the SIS method frequently encounters the challenge of degeneracy. Degeneracy refers to the phenomenon in which only specific weights are consistently chosen after multiple iterations of SIS The resampling process can be employed to alleviate the degradation of the particles. There are several resampling methods, such as multinomial resampling, residual resampling, systematic resampling, etc. [45,46]. The systematic resampling is used in this paper and the pseudo-code is given in Algorithm 1.
The distribution in Algorithm 1 is uniform distribution and is the particles after resampling. and denote the quantities of particles prior to and subsequent to resampling, correspondingly. After resampling, the weight of all particles will be set to .
| Algorithm 1 Systematic Resampling Pseudo-code. |
|
We can summarize the implementation steps of the proposed approach as follows:
- Based on (48), generate newborn particles and continuing particles.where i and j represent the index of newborn and continuing particles, respectively. For the continuing particles, the target state-transition function can be obtained from (25). For the newborn particles, a uniform distribution can be used.
- Calculate the weights of the particles and normalize them. For the newborn particles:For the continuing particles:
- Calculate .We can use the Monte Carlo sampling method to calculate the integral, and the value is
- Calculate in (37). For , define continuing mixing term.And for , the newborn mixing term isThen can be calculatedand
- Calculate the probability of existence, in (43).First, from (45), we can obtain
- Calculate the posterior target state density from (35).Combine the newborn particles set and the continuing particles set into a large set as follows:
- Resample particles down to the particles set, .
- First, Estimate the ambiguity number of the target.where is the logical operation, when it equal to logic 1, in contrast, equal to logic 0. is the velocity of a particle with index i and & is the logic AND operation.Then estimate the other motion state:
4. Simulations and Results
4.1. Design of the Simulation System
In the simulation experiment, the echo signals are generated with the true parameters of a ubiquitous radar. The parameters of radar are shown in Table 1.

Table 1.
Parameters of Radar.
The echoes are produced by mixing the desired signal with zeros mean Gaussian white noise and can be expressed as
where is the additive Gaussian white noise with zero mean and variance .
Then the SNR of the echoes is defined as
where E is the power of the desired signal:
In the simulation, the target appears first in the sixth frame of ERD images and then disappears in the twenty-sixth frame. The motion state of the target is shown in Table 2. The initial radical velocity is −300 m/s, hence the corresponding ambiguity number is −1. As time progresses, the ambiguity number corresponding to the target velocity approaches 0.
Table 2.
Motion State of Target.
Then the birth probability () and the death probability () are both set to 0.05. The prior density of birth particles follows the following uniform distributions: , , , . The numbers of particles are set to and .
The Monte Carlo test times are set to 50 and the root mean square error (RMSE) is defined as
where , and represent the estimation of the target’s distance, velocity, and acceleration, respectively, at the frame p in the eth Monte Carlo test. , , and denote the true distance, velocity, and acceleration, respectively.
To compare the performance of the LSM and PSM, we first calculate the weights based on the deviations of distance and velocity between the particles and real target, as Figure 5 shows. It indicates that given the same , the weight of LSM is higher than that of PSM. Therefore, the integration efficiency of IPF is higher than traditional PF in the presence of DFM.
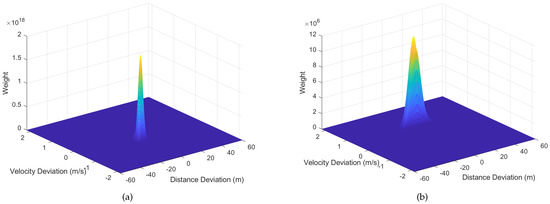
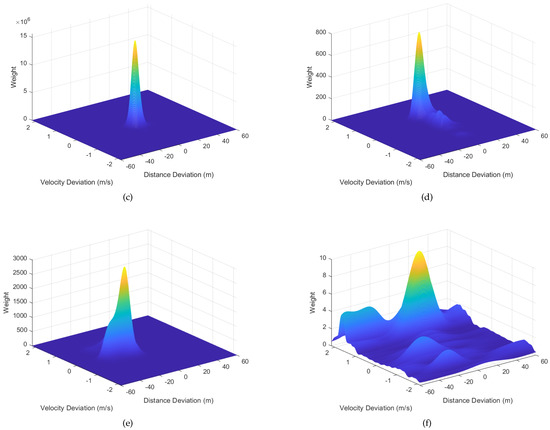
Figure 5.
Relationship Between Weights and the Deviations. (a) LSM with −15 db. (b) PSM with −15 db. (c) LSM with −18 db. (d) PSM with −18 db. (e) LSM with −21 db. (f) PSM with −21 db.
The ERD images with the various are shown in Figure 6. It is obvious that it is hard to detect the target using Constant False Alarm Rate (CFAR) technology.
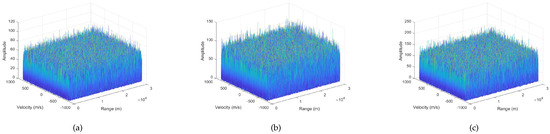
Figure 6.
(a) ERD image with −15 db. (b) ERD image with −18 db. (c) ERD image with −21 db.
To evaluate the effectiveness of the proposed method in this paper, we conducted four group experiments at different levels. The first experiment involved implementing the IPF on ERD images. In the second experiment, we utilized the traditional PF as proposed in [37], using the PSM as the spread function, on sub-RD images. The third experiment employed the method outlined in [37], again utilizing PSM as the spread function, on ERD images. Finally, the IPF was implemented on sub-RD images for the fourth experiment. These experimental methods are referred to as Method A, Method B, Method C, and Method D, respectively.
Figure 7 illustrates the estimation of the target existence probability for the three methods under various SNR. When the probability exceeds the detection threshold, the target can be considered alive at that moment. In this simulation, the value of the threshold is set to 0.7, which is denoted as a dotted line in Figure 7. It shows that due to the lack of consideration of VA, the energy of the target cannot be sufficiently accumulated, which results in the complete useless of Method B and Method D. Subsequently, a comparison between Method A and Method C reveals that the IPF exhibits superior performance in the presence of DFM within ERD imagery when contrasted with the conventional PF. Although the performance of traditional PF can reach the IPF under relatively high . LSM can achieve far better performance than PSM under low .
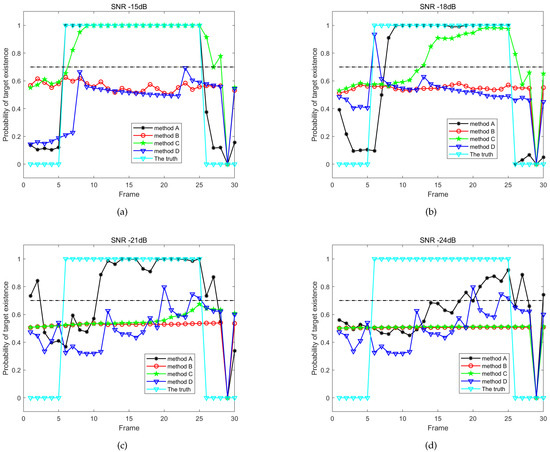
Figure 7.
Estimation of the Target Existence Probability. (a) With −15 db. (b) With −18 db. (c) With −21 db. (d) With −24 db.
RMSE reflects the deviation between the estimated data value and the true value. The RMSEs of Method A and Method C with different are shown in Figure 8. With the decline of , the tracking accuracy of the two methods degrades. Meanwhile, Method A shows a better performance than Method C, especially under low . It indicates that the distance and velocity of the target can be estimated more accurately by Method A. The RMSE of the two methods increases as the decreases.
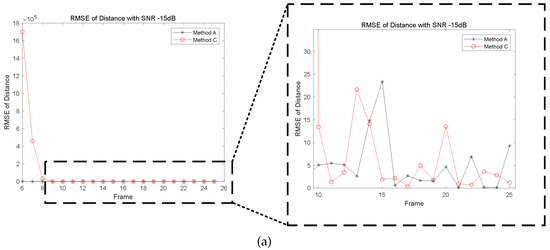
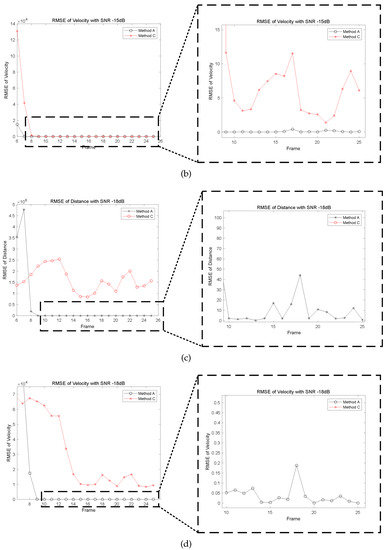
Figure 8.
The RMSE of: (a) Distance with −15 db. (b) Velocity with −15 db. (c) Distance with −18 db. (d) Velocity with −18 db.
4.2. Integration Efficiency Analysis
The proposed KT-MFP-IPF-TBD algorithm in this paper is a hybrid integration algorithm, which can achieve integrated detection and tracking. However, the target integration efficiency remains an important reference for evaluating its algorithmic performance. The detection capability of an algorithm is closely related to its integration efficiency, hence detection capability can be used to evaluate integration efficiency. This paper compared the detection capability of three methods: A hybrid integration method proposed in [16], which is consisted of moving target detection and generalized radon transform (MTD-GRT); A coherent integration method proposed in [8], which is consisted of second-order Keystone transform, Fractional Fourier Transform and radon Fourier transform (SoKT-FrFT-RFT); KT-MFP-IPF-TBD method proposed in this paper. For the methods proposed in papers [8,16], a target detector is also required to detect the targets. In this paper, the Cell Average Constant False Alarm Rate (CA-CFAR) is adopted as the detector [47]. The number of target’s echoes is 20,480, the three methods perform detection based on these echoes. To prevent RM and DFM, the coherent integration number of MTD in the MTD-GRT method is set to 256, therefore the GRT is used to perform incoherent integration among 80 sub-RD images. In the SoKT-FrFT-RFT method, all of the 20,480 echoes are used in coherent integration. In the KT-MFP-IPF-TBD method, the coherent integration number is set to 2048, therefore the IPF is used to perform incoherent integration among 10 ERD images. The False alarm probability of CA-CFAR is set to . Performing 1000 times Monte Carlo tests, The experiment results are shown in Figure 9. The computational complexity of the three methods is shown in Table 3, where flops are used to represent complexity.
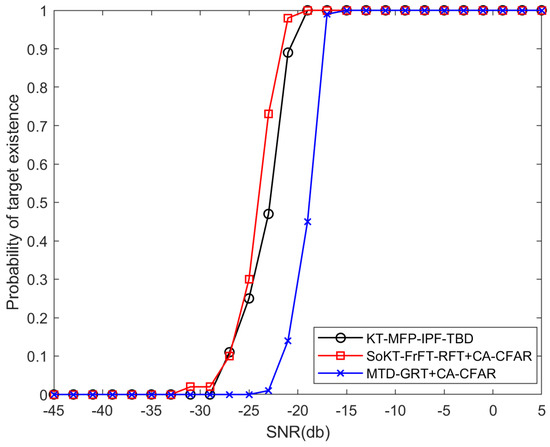
Figure 9.
Detection capability of the three methods.
Table 3.
Calculation complexity of the three methods.
From the experiment result, it can be seen that KT-MFP-IPF-TBD, as a hybrid accumulation approach, has a detection performance very close to the coherent accumulation approach SoKT-FrFT-RFT. Specifically, for the needed detection probability, the needed SNR of the SoKT-FrFT-RFT method is −22.5 dB and that of KT-MFP-IPF-TBD is –21.5 dB, i.e., the proposed method only suffer from 1 dB SNR loss. However, the computational complexity of KT-MFP-IPF-TBD is two orders of magnitude lower than that of SoKT-FrFT-RFT. For the needed detection probability, the needed SNR of the MTD-GRT method is −17.5 dB. Hence, as with MTD-GRT, which is also a hybrid integration method, its detection performance is significantly lower than that of KT-MFP-IPF-TBD and has a 4 dB higher SNR loss compared to method KT-MFP-IPF-TBD.
4.3. Ubiquitous Radar Actual Data Validation
In this paper, the algorithms were validated using holographic radar echo data from high-speed and highly maneuverable aircraft targets. The aircraft hovers in the air with a maximum speed exceeding 275 m/s, resulting in VA and ambiguity number values of −1, 0, and 1. The ERD plane is composed of three sub-RD and 200 frames of turning data are selected for experimentation. The ERD plane under two different motion states is shown in Figure 10. It can be observed that when the acceleration is low, the target energy is more concentrated and the SNR is higher; when the acceleration is high, the target energy is scattered and the SNR is lower. The estimation results of the target state are shown in Figure 11, it can be seen that the proposed method in this paper is effective in detecting and tracking high-speed and highly maneuverable targets.
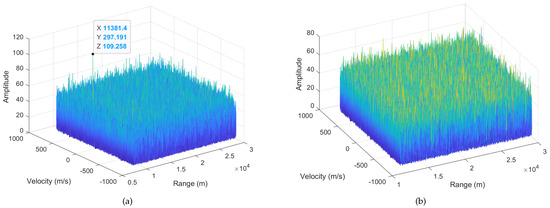
Figure 10.
ERD images of aircraft. (a) With lower acceleration. (b) With higher acceleration.
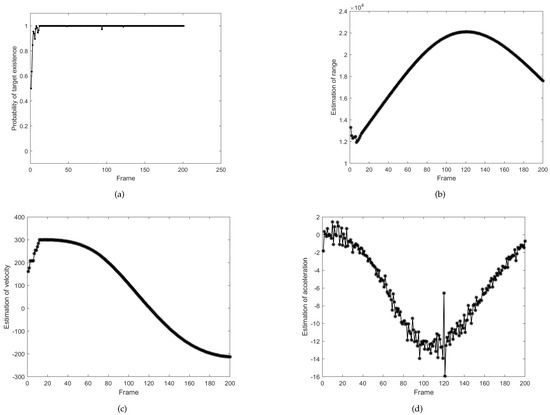
Figure 11.
Estimation of aircraft. (a) Probability of target existence. (b) Radial range. (c) Radial velocity. (d) Radial acceleration.
5. Conclusions
Due to the low transmission gain of ubiquitous radar, the LTCA is a key technique for ubiquitous radar signal processing. However, both RM and DFM can deteriorate the actual performance of this technique. To compensate for RM and DFM, this paper proposes a KT-MFP-IPF-TBD method compatible with ubiquitous radar. First, we apply the KT to mitigate the effects of first-order RM. Subsequently, we employ the MFP to resolve the VA. This sequence of steps yields an ERD image that encompasses a broader range of Doppler frequencies. The ubiquitous radar system, known for its comprehensive coverage in both space and time domains, enables the utilization of recursive TBD algorithms for improved performance. To this end, we propose an IPF incorporating an LSM for the purpose of target tracking and detection.
In our simulation, with a total number of 200,000 particles, the final results showed that this method can detect and track targets reliably and presents a better performance than the traditional PF. Compared to the SoKT-FrFT-RFT method, the proposed approach in this paper can reduce computational complexity by two orders of magnitude with only a 1 dB loss in signal-to-noise ratio. Moreover, compared with other hybrid integration methods, the detection performance of KT-MFP-IPF-TBD is significantly higher resulting in a 4dB greater SNR improvement. Finally, we validated the proposed method by utilizing empirical data from high-speed and high-maneuver targets. The results demonstrate that the algorithm put forth in this study yields excellent efficacy.
Author Contributions
Conceptualization, X.P.; methodology, X.P.; software, X.P.; validation, X.P., W.W. and Y.Z.; formal analysis, X.P. and Q.S.; investigation, X.P.; resources, X.P. and Y.Z.; data curation, X.P. and Y.Z.; writing—original draft preparation, X.P.; writing—review and editing, X.P., W.W., Q.S. and Y.Z.; visualization, X.P. and Y.Z.; supervision, X.P. and Y.Z.; project administration, X.P., W.W., Q.S. and Y.Z.; funding acquisition, Y.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the Shenzhen Fundamental Research Program (No.JCYJ20180 307151430655).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Wu, Q.; Chen, J.; Wu, H.; Zhang, Y.; Chen, Z. Experimental Study on Micro-Doppler Effect and Micro-Motion Characteristics of aerial targets based on holographic staring Radar. In Proceedings of the 2019 IEEE 8th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 1 May 2019; pp. 1186–1190. [Google Scholar]
- Dorsey, W.M.; Scholnik, D.P.; Stumme, A. Performance Comparison of Planar, Cylindrical, and Polygonalized Phased Arrays for Surveillance and Ubiquitous Radar. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 596–602. [Google Scholar] [CrossRef]
- Wirth, W.D. Long term coherent integration for a floodlight radar. In Proceedings of the International Radar Conference, Alexandria, VA, USA, 8 May 1995; pp. 698–703. [Google Scholar]
- IEEE Std 686-2017 (Revision of IEEE Std 686-2008); IEEE Standard for Radar Definitions. IEEE: Piscateville, NJ, USA, 13 September 2017; pp. 1–54. [CrossRef]
- Huang, P.; Liao, G.; Yang, Z.; Xia, X.-G.; Ma, J.-T.; Ma, J. Long-Time Coherent Integration for Weak Maneuvering Target Detection and High-Order Motion Parameter Estimation Based on Keystone Transform. In Proceedings of the IEEE Transactions on Signal Processing, Chengdu, China, 6–10 November 2016; IEEE: New York, NY, USA, 1 August 2016; Volume 64, pp. 4013–4026. [Google Scholar] [CrossRef]
- Zhang, S.-s.; Zeng, T.; Long, T.; Yuan, H.-p. Dim target detection based on keystone transform. In Proceedings of the IEEE International Radar Conference, Arlington, VA, USA, 9–12 May 2005; pp. 889–894. [Google Scholar] [CrossRef]
- Perry, R.P.; DiPietro, R.C.; Fante, R.L. Coherent Integration With Range Migration Using Keystone Formatting. In Proceedings of the 2007 IEEE Radar Conference, Waltham, MA, USA, 17–20 April 2007; pp. 863–868. [Google Scholar] [CrossRef]
- Tian, J.; Cui, W.; Wu, S. A Novel Method for Parameter Estimation of Space Moving Targets. In Proceedings of the IEEE Geoscience and Remote Sensing Letters, Quebec City, QC, Canada, 13–18 July 2014; Volume 11, pp. 389–393. [Google Scholar] [CrossRef]
- Xu, J.; Yu, J.; Peng, Y.-N.; Xia, X.-G. Radon-Fourier Transform for Radar Target Detection, I: Generalized Doppler Filter Bank. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1186–1202. [Google Scholar] [CrossRef]
- Xu, J.; Yu, J.; Peng, Y.-N.; Xia, X.-G. Radon-Fourier Transform for Radar Target Detection (II): Blind Speed Sidelobe Suppression. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2473–2489. [Google Scholar] [CrossRef]
- Yu, J.; Xu, J.; Peng, Y.-N.; Xia, X.-G. Radon-Fourier Transform for Radar Target Detection (III): Optimality and Fast Implementations. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 991–1004. [Google Scholar] [CrossRef]
- Xu, J.; Xia, X.-G.; Peng, S.-B.; Yu, J.; Peng, Y.-N.; Qian, L.-C. Radar Maneuvering Target Motion Estimation Based on Generalized Radon-Fourier Transform. IEEE Trans. Signal Process. 2012, 60, 6190–6201. [Google Scholar] [CrossRef]
- Yao, D.; Zhang, X.; Sun, Z. Long-Time Coherent Integration for Maneuvering Target Based on Second-Order Keystone Transform and Lv’s Distribution. Electronics 2022, 11, 1961. [Google Scholar] [CrossRef]
- Yu, W.; Su, W.; Hong, G. Ground moving target motion parameter estimation using Radon modified Lv’s distribution. Digit. Signal Process. 2017, 69, 212–223. [Google Scholar] [CrossRef]
- Chen, X.; Guan, J.; Liu, N.; He, Y. Maneuvering Target Detection via Radon-Fractional Fourier Transform-Based Long-Time Coherent Integration. IEEE Trans. Signal Process. 2014, 62, 939–953. [Google Scholar] [CrossRef]
- Xu, J.; Zhou, X.; Qian, L.-C.; Xia, X.-G.; Long, T. Hybrid integration for highly maneuvering radar target detection based on generalized radon-fourier transform. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 2554–2561. [Google Scholar] [CrossRef]
- Zhou, X.; Qian, L.; Ding, Z.; Xu, J.; Liu, W.; You, P.; Long, T. Radar Detection of Moderately Fluctuating Target Based on Optimal Hybrid Integration Detector. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2408–2425. [Google Scholar] [CrossRef]
- He, Z.; Yang, Y.; Chen, W. A Hybrid Integration Method for Moving Target Detection With GNSS-Based Passive Radar. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2021, 14, 1184–1193. [Google Scholar] [CrossRef]
- Bao, Z.C.; Jiang, Q.X.; Liu, F.Z. Multiple model efficient particle filter based track-before-detect for maneuvering weak targets. J. Syst. Eng. Electron. 2020, 31, 647–656. [Google Scholar]
- Xu, C.; He, Z.S.; Liu, H.c.; Li, Y.D. Bayesian track-before-detect algorithm for nonstationary sea clutter. J. Syst. Eng. Electron. 2021, 32, 1338–1344. [Google Scholar]
- Kim, D.Y.; Ristic, B. Guan, R.; Rosenberg, L. A Bernoulli Track-Before-Detect Filter for Interacting Targets in Maritime Radar. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 1981–1991. [Google Scholar] [CrossRef]
- Lu, X.; Wang, Z.; Deng, M.; Shi, J.; He, Z.; Li, H. Track-Before-Detect Algorithm for Airborne Radar in Compound Gaussian Clutter with Inverse Gaussian Texture. In Proceedings of the 2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17 July 2022; pp. 2813–2816. [Google Scholar]
- Satzoda, R.K.; Suchitra, S.; Srikanthan, T. Parallelizing the Hough Transform Computation. IEEE Signal Process Lett. 2008, 15, 297–300. [Google Scholar] [CrossRef]
- Zeng, J.K.; He, Z.S.; Sellathurai, M.; Liu, H.M. Modified Hough Transform for Searching Radar Detection. IEEE Geosci. Remote Sens. Lett. 2008, 5, 683–686. [Google Scholar]
- Lin, H.; Zeng, C.; Zhang, H.; Jiang, G. Radar Maneuvering Target Motion Parameter Estimation Based on Hough Transform and Polynomial Chirplet Transform. IEEE Access 2021, 9, 35178–35195. [Google Scholar] [CrossRef]
- Elhoshy, M.; Gebali, F.; Gulliver, T.A. Expanding Window Dynamic-Programming-Based Track-Before-Detect With Order Statistics in Weibull Distributed Clutter. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 2564–2575. [Google Scholar] [CrossRef]
- Grossi, E.; Lops, M.; Venturino, L. A Novel Dynamic Programming Algorithm for Track-Before-Detect in Radar Systems. IEEE Trans. Signal Process. 2013, 61, 2608–2619. [Google Scholar] [CrossRef]
- Yi, W.; Kong, L.; Yang, J.; Morelande, M.R. Student highlight: Dynamic programming-based track-before-detect approach to multitarget tracking. IEEE Trans. Aerosp. Electron. Syst. 2012, 27, 31–33. [Google Scholar] [CrossRef]
- Li, W.; Yi, W.; Teh, K.C.; Kong, L. Adaptive Multiframe Detection Algorithm With Range-Doppler-Azimuth Measurements. IEEE Trans. Geosci. Remote. Sens. 2022, 60, 5119616. [Google Scholar] [CrossRef]
- Yi, W.; Fang, Z.; Li, W.; Hoseinnezhad, R.; Kong, L. Multi-Frame Track-Before-Detect Algorithm for Maneuvering Target Tracking. IEEE Trans. Veh. Technol. 2020, 69, 4104–4118. [Google Scholar] [CrossRef]
- Wang, L.; Zhou, G. Pseudo-Spectrum Based Track-Before-Detect for Weak Maneuvering Targets in Range-Doppler Plane. IEEE Trans. Veh. Technol. 2021, 70, 3043–3058. [Google Scholar] [CrossRef]
- Garcia, F.J.I.; Mandal, P.K.; Bocquel, M.; Marques, A.G. Riemann–Langevin Particle Filtering in Track-Before-Detect. IEEE Signal Process Lett. 2018, 25, 1039–1043. [Google Scholar] [CrossRef]
- Úbeda-Medina, L.; García-Fernández, Á.F.; Grajal, J. Adaptive Auxiliary Particle Filter for Track-Before-Detect With Multiple Targets. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2317–2330. [Google Scholar] [CrossRef]
- Ito, N.; Godsill, S. A Multi-Target Track-Before-Detect Particle Filter Using Superpositional Data in Non–Gaussian Noise. IEEE Signal Process Lett. 2020, 27, 1075–1079. [Google Scholar] [CrossRef]
- Park, J. Particle filter track-before-detect application using inequality constraints. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1483–1489. [Google Scholar]
- Salmond, D.J.; Birch, H. A particle filter for track-before-detect. In Proceedings of the 2001 American Control Conference, Arlington, VA, USA, 25–27 June 2001; pp. 3755–3760. [Google Scholar]
- Rutten, M.G.; Gordon, N.J.; Maskell, S. Efficient particle-based track-before-detect in Rayleigh noise. In Proceedings of the 7th Proceeding of the International Conference on Information Fusion, Sweden, Stockholm, 28 June–1 July 2004; pp. 693–700. [Google Scholar]
- Pignol, F.; Colone, F.; Martelli, T. Lagrange–Polynomial-Interpolation-Based Keystone Transform for a Passive Radar. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 1151–1167. [Google Scholar] [CrossRef]
- Zhan, M. A Modified Keystone Transform Matched Filtering Method for Space-Moving Target Detection. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–16. [Google Scholar] [CrossRef]
- Li, G.; Xia, X.G.; Peng, Y.N. Doppler Keystone Transform: An Approach Suitable for Parallel Implementation of SAR Moving Target Imaging. IEEE Trans. Geosci. Remote Sens. Lett. 2008, 5, 573–577. [Google Scholar] [CrossRef]
- Wang, R. Processing the Azimuth-Variant Bistatic SAR Data by Using Monostatic Imaging Algorithms Based on Two-Dimensional Principle of Stationary Phase. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3504–3520. [Google Scholar] [CrossRef]
- Mulgrew, B. The Stationary Phase Approximation, Time-Frequency Decomposition and Auditory Processing. IEEE Trans. Signal Process. 2014, 62, 56–68. [Google Scholar] [CrossRef]
- Mochnac, J.; Marchevsky, S.; Kocan, P. Bayesian filtering techniques: Kalman and extended Kalman filter basics. In Proceedings of the 2009 19th International Conference Radioelektronika, Bratislava, Slovakia, 22 April 2009; pp. 119–122. [Google Scholar]
- Gross, F.B. New approximations to J/sub 0/ and J/sub 1/ Bessel functions. IEEE Trans. Antennas Propag. 1995, 43, 904–907. [Google Scholar] [CrossRef]
- Bruno, M.G.S. Sequential importance sampling filtering for target tracking in image sequences. IEEE Signal Process. Lett. 2003, 10, 246–249. [Google Scholar] [CrossRef]
- Douc, R.; Cappe, O. Comparison of resampling schemes for particle filtering. In Proceedings of the 4th International Symposium on Image and Signal Processing and Analysis, Zagreb, Croatia, 15 September 2005; pp. 64–69. [Google Scholar]
- Finn, H.M.; Johnson, R.S. Adaptive Detection Mode with Threshold Control as a Function of Spatially Sampled Clutter-Level Estimates. Rca Rev. 1968, 29, 414–463. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).