
Band-Optimized Bidirectional LSTM Deep Learning Model for Bathymetry Inversion

Abstract
1. Introduction
2. Materials and Methods
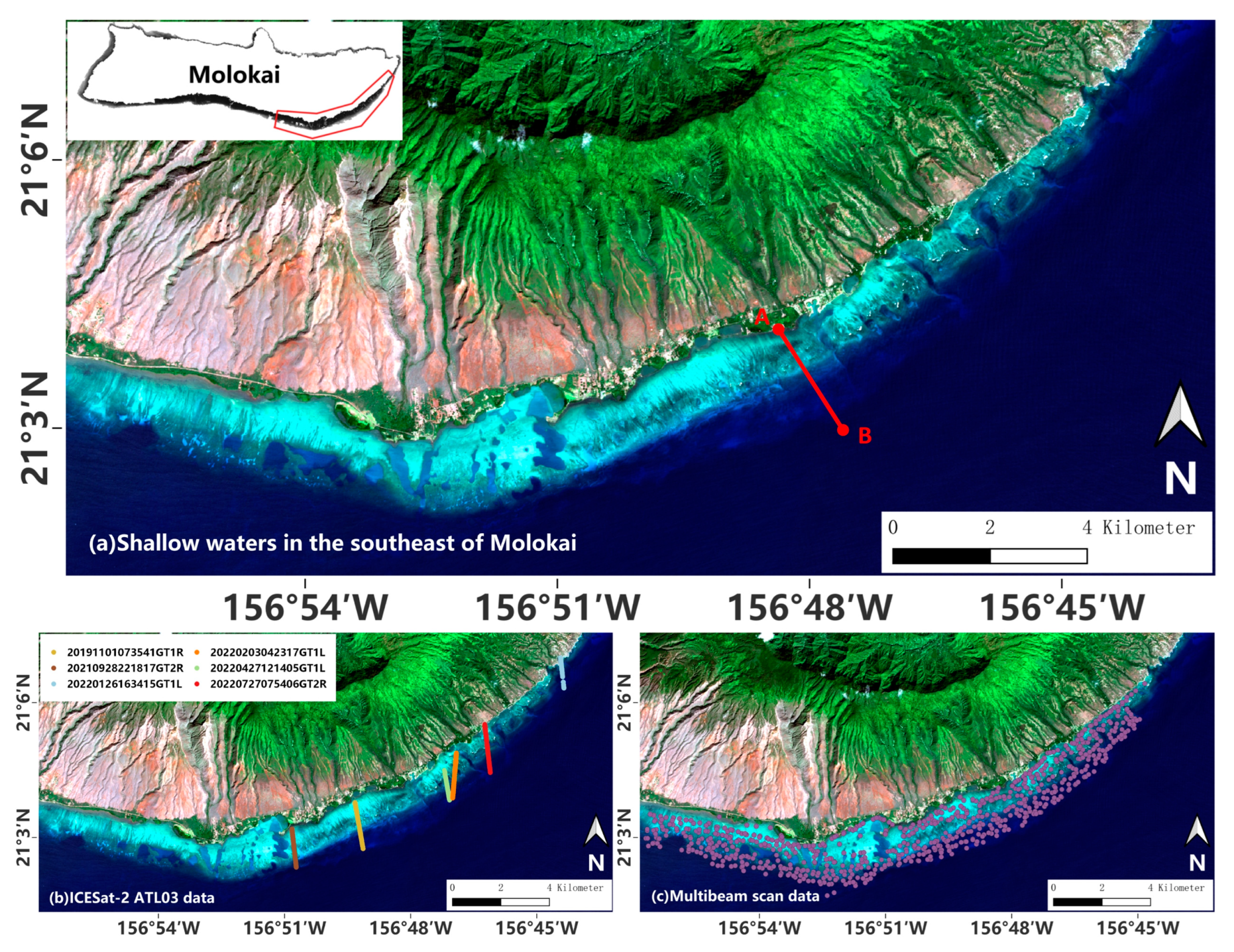
2.1. Analysis Area
2.2. Existing Methods
2.3. Datasets
2.3.1. PRISMA—Hyperspectral Satellite Images
2.3.2. Sentinel-2—Multispectral Satellite Images
2.3.3. ICESat-2 Data—Training Data
2.3.4. Multibeam Scan Data—Training Data
2.3.5. Independent Reference Bathymetry Map—Validation Data
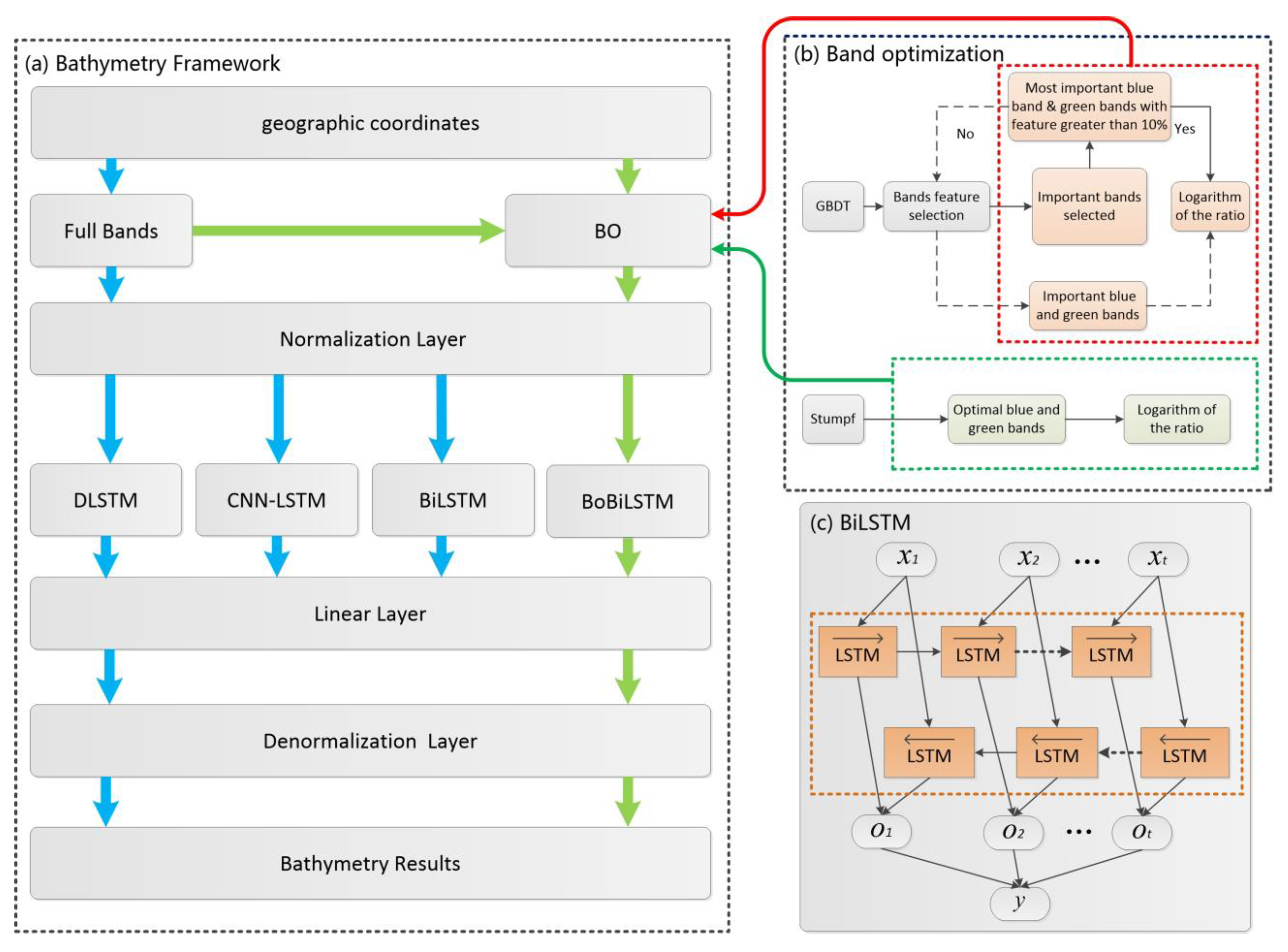
2.4. BoBiLSTM Model
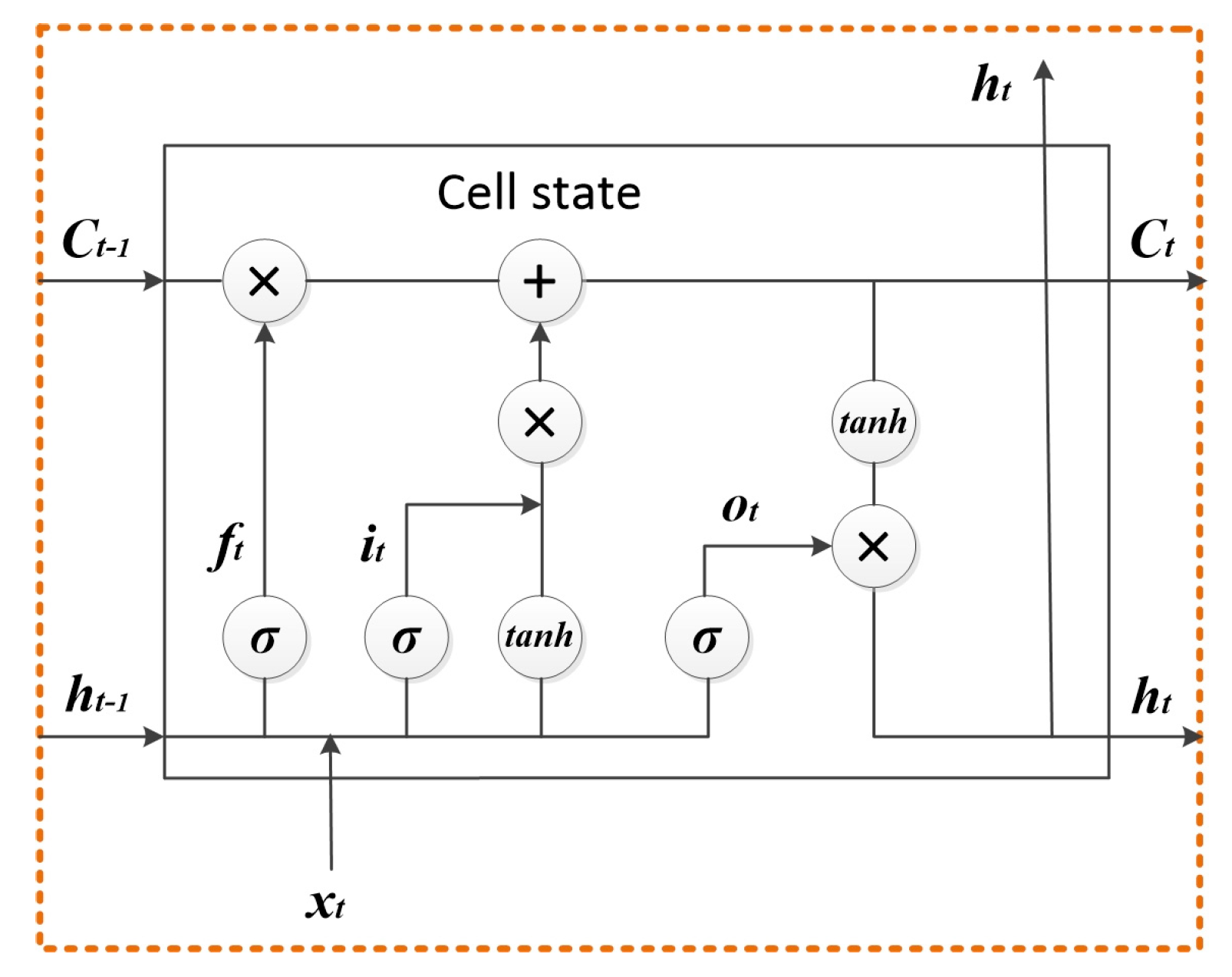
2.4.1. BiLSTM
2.4.2. Band Optimization Method
2.4.3. Bathymetry Inversion Framework
2.5. Evaluation Method
3. Results
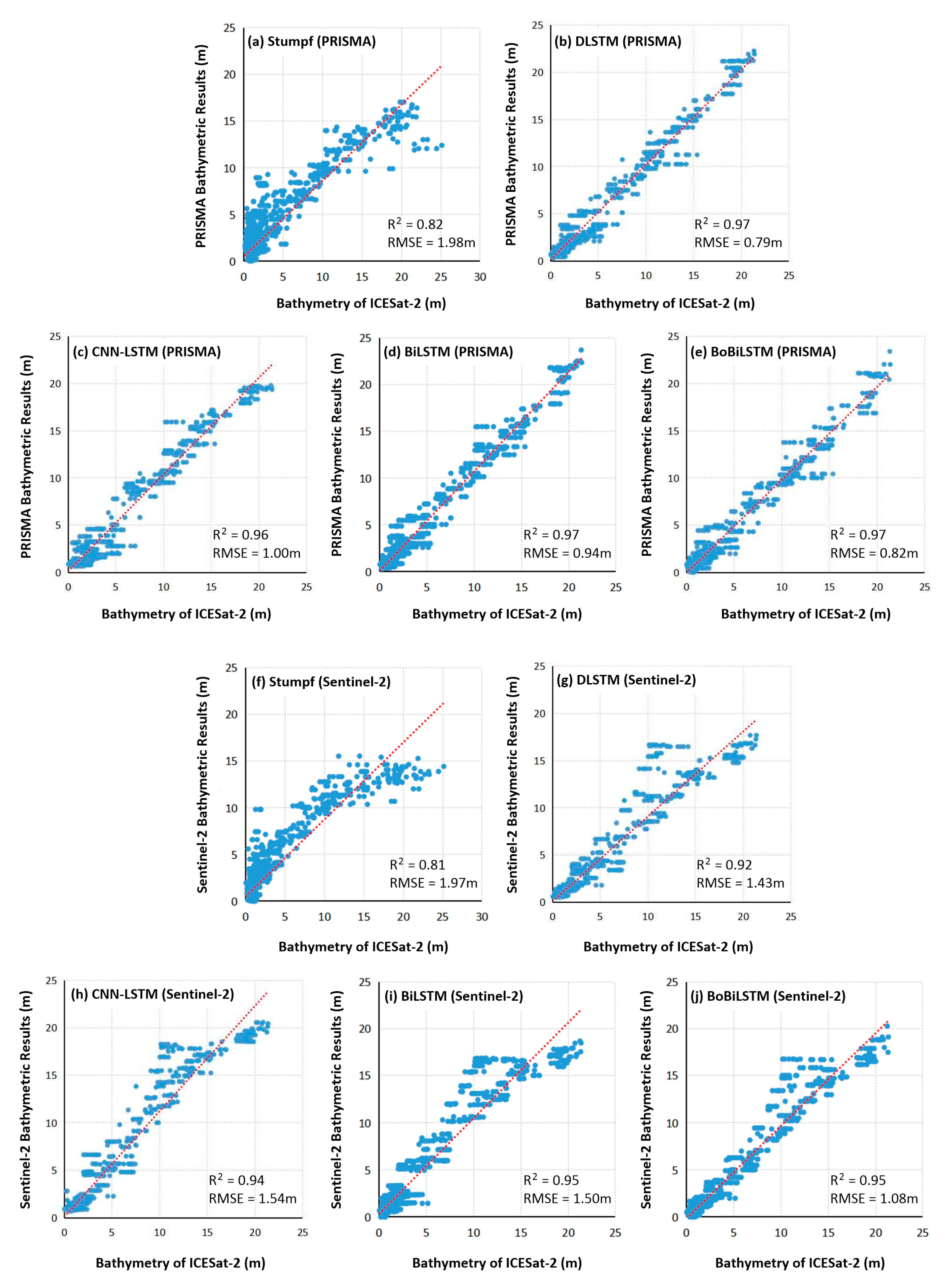
3.1. Bathymetry Inversion Using ICESat-2 Data
3.1.1. Bathymetry of ICESat-2 Data
3.1.2. Bathymetry Inversion Using ICESat-2 Data
3.2. Bathymetry Inversion Using Multibeam Scan Data
4. Discussions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lyons, M.; Phinn, S.; Roelfsema, C. Integrating Quickbird Multi-Spectral Satellite and Field Data: Mapping Bathymetry, Seagrass Cover, Seagrass Species and Change in Moreton Bay, Australia in 2004 and 2007. Remote Sens. 2011, 3, 42–64. [Google Scholar] [CrossRef]
- Kutser, T.; Hedley, J.; Giardino, C.; Roelfsema, C.; Brando, V.E. Remote Sensing of Shallow Waters—A 50 Year Retrospective and Future Directions. Remote Sens. Environ. 2020, 240, 111619. [Google Scholar] [CrossRef]
- Storlazzi, C.D.; Logan, J.B.; Field, M.E. Quantitative Morphology of A Fringing Reef Tract from High-resolution Laser Bathymetry Southern Molokai, Hawaii. Geol. Soc. Am. Bull. 2003, 115, 1344. [Google Scholar] [CrossRef]
- Wölfl, A.-C.; Snaith, H.; Amirebrahimi, S.; Devey, C.W.; Dorschel, B.; Ferrini, V.; Huvenne, V.A.I.; Jakobsson, M.; Jencks, J.; Johnston, G.; et al. Seafloor Mapping—The Challenge of a Truly Global Ocean Bathymetry. Front. Mar. Sci. 2019, 6, 283. [Google Scholar] [CrossRef]
- Jörges, C.; Berkenbrink, C.; Stumpe, B. Prediction and Reconstruction of Ocean Wave Heights Based on Bathymetric Data Using LSTM Neural Networks. Ocean Eng. 2021, 232, 109046. [Google Scholar] [CrossRef]
- Shang, X.; Zhao, J.; Zhang, H. Obtaining High-Resolution Seabed Topography and Surface Details by Co-Registration of Side-Scan Sonar and Multibeam Echo Sounder Images. Remote Sens. 2019, 11, 1496. [Google Scholar] [CrossRef]
- National Oceanic and Atmospheric Administration (NOAA): Field Procedures Manual. Available online: https://nauticalcharts.noaa.gov/publications/docs/standards-and-requirements/fpm/2014-fpm-final.pdf (accessed on 15 September 2022).
- Westfeld, P.; Maas, H.-G.; Richter, K.; Weiß, R. Analysis and Correction of Ocean Wave Pattern Induced Systematic Coordinate Errors in Airborne LiDAR Bathymetry. ISPRS J. Photogramm. Remote Sens. 2017, 128, 314–325. [Google Scholar] [CrossRef]
- Pan, Z.; Glennie, C.; Hartzell, P.; Fernandez-Diaz, J.; Legleiter, C.; Overstreet, B. Performance Assessment of High Resolution Airborne Full Waveform LiDAR for Shallow River Bathymetry. Remote Sens. 2015, 7, 5133–5159. [Google Scholar] [CrossRef]
- Zhao, J.; Zhao, X.; Zhang, H.; Zhou, F. Improved Model for Depth Bias Correction in Airborne LiDAR Bathymetry Systems. Remote Sens. 2017, 9, 710. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, Y.; Le, Y.; Zhang, D.; Yan, Q.; Dong, Y.; Han, W.; Wang, L. Nearshore Bathymetry Based on ICESat-2 and Multispectral Images: Comparison Between Sentinel-2, Landsat-8, and Testing Gaofen-2. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 2449–2462. [Google Scholar] [CrossRef]
- Muzirafuti, A.; Crupi, A.; Lanza, S.; Barreca, G.; Randazzo, G. Shallow water bathymetry by satellite image: A case study on the coast of San Vito Lo Capo Peninsula, Northwestern Sicily, Italy. In Proceedings of the IMEKO TC-19 International Workshop on Metrology for the Sea, Genoa, Italy, 3–5 October 2019. [Google Scholar]
- Almar, R.; Bergsma, E.W.J.; Thoumyre, G.; Baba, M.W.; Cesbron, G.; Daly, C.; Garlan, T.; Lifermann, A. Global Satellite-Based Coastal Bathymetry from Waves. Remote Sens. 2021, 13, 4628. [Google Scholar] [CrossRef]
- Danilo, C.; Melgani, F. High-Coverage Satellite-Based Coastal Bathymetrythrough a Fusion of Physical and Learning Methods. Remote Sens. 2019, 11, 376. [Google Scholar] [CrossRef]
- Cao, B.; Fang, Y.; Jiang, Z.; Gao, L.; Hu, H. Shallow Water Bathymetry from WorldView-2 Stereo Imagery Using Two-media Photogrammetry. Eur. J. Remote Sens. 2019, 52, 506–521. [Google Scholar] [CrossRef]
- Mishra, M.K.; Ganguly, D.; Chauhan, P.; Ajai. Estimation of Coastal Bathymetry Using RISAT-1 C-Band Microwave SAR Data. IEEE Geosci. Remote Sens. Lett. 2014, 11, 671–675. [Google Scholar] [CrossRef]
- Specht, M.; Stateczny, A.; Specht, C.; Widźgowski, S.; Lewicka, O.; Wiśniewska, M. Concept of an Innovative Autonomous Unmanned System for Bathymetric Monitoring of Shallow Waterbodies (INNOBAT System). Energies 2021, 14, 5370. [Google Scholar] [CrossRef]
- Specht, M.; Wisniewska, M.; Stateczny, A.; Specht, C.; Szostak, B.; Lewicka, O.; Stateczny, M.; Widzgowski, S.; Halicki, A. Analysis of Methods for Determining Shallow Waterbody Depths Based on Images Taken by Unmanned Aerial Vehicles. Sensors 2022, 22, 1844. [Google Scholar] [CrossRef] [PubMed]
- Lewicka, O.; Specht, M.; Stateczny, A.; Specht, C.; Dardanelli, G.; Brčić, D.; Szostak, B.; Halicki, A.; Stateczny, M.; Widźgowski, S. Integration Data Model of the Bathymetric Monitoring System for Shallow Waterbodies Using UAV and USV Platforms. Remote Sens. 2022, 14, 4075. [Google Scholar] [CrossRef]
- Najar, M.A.; Bennioui, Y.E.; Thoumyre, G.; Almar, R.; Bergsma, E.W.J.; Benshila, R.; Delvit, J.-M.; Wilson, D.G. A Combined Color and Wave-Based Approach to Satellite Derived Bathymetry Using Deep Learning. In Proceedings of the The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Nice, France, 6–11 June 2022; Volume XLIII-B3-2022, pp. 9–16. [Google Scholar] [CrossRef]
- Jawak, S.D.; Vadlamani, S.S.; Luis, A.J. A Synoptic Review on Deriving Bathymetry Information Using Remote Sensing Technologies: Models, Methods and Comparisons. Adv. Remote Sens. 2015, 4, 147–162. [Google Scholar] [CrossRef]
- Casal, G.; Monteys, X.; Hedley, J.; Harris, P.; Cahalane, C.; McCarthy, T. Assessment of Empirical Algorithms for Bathymetry Extraction Using Sentinel-2 Data. Int. J. Remote Sens. 2018, 40, 2855–2879. [Google Scholar] [CrossRef]
- Yunus, A.P.; Dou, J.; Song, X.; Avtar, R. Improved Bathymetric Mapping of Coastal and Lake Environments Using Sentinel-2 and Landsat-8 Images. Sensors 2019, 19, 2788. [Google Scholar] [CrossRef]
- Amrari, S.; Bourassin, E.; Andréfouët, S.; Soulard, B.; Lemonnier, H.; Le Gendre, R. Shallow Water Bathymetry Retrieval Using a Band-Optimization Iterative Approach: Application to New Caledonia Coral Reef Lagoons Using Sentinel-2 Data. Remote Sens. 2021, 13, 4108. [Google Scholar] [CrossRef]
- Lyzenga, D.R. Shallow-water Bathymetry Using Combined Lidar and Passive Multispectral Scanner Data. Int. J. Remote Sens. 2010, 6, 115–125. [Google Scholar] [CrossRef]
- Stumpf, R.; PHolderied, K.; Sinclair, M. Determination of Water Depth with High-resolution Satellite Imagery over Variable Bottom Types. Limnol. Oceanogr. 2003, 48 Pt 2, 547–556. [Google Scholar] [CrossRef]
- Fotheringham, A.S.; Charlton, M.E.; Brunsdon, C. Geographically Weighted Regression: A Natural Evolution of the Expansion Method for Spatial Data Analysis. Environ. Plan. A 1998, 30, 1905–1927. [Google Scholar] [CrossRef]
- Casal, G.; Harris, P.; Monteys, X.; Hedley, J.; Cahalane, C.; McCarthy, T. Understanding Satellite-derived Bathymetry Using Sentinel 2 Imagery and Spatial Prediction Models. GIScience Remote Sens. 2019, 57, 271–286. [Google Scholar] [CrossRef]
- Ceyhun, Ö.; Yalçın, A. Remote Sensing of Water Depths in Shallow Waters via Artificial Neural Networks. Estuar. Coast. Shelf Sci. 2010, 89, 89–96. [Google Scholar] [CrossRef]
- Nagamani, P.V.; Chauhan, P.; Sanwlani, N.; Ali, M.M. Artificial Neural Network (ANN) Based Inversion of Benthic Substrate Bottom Type and Bathymetry in Optically Shallow Waters-Initial Model Results. J. Indian Soc. Remote Sens. 2012, 40, 137–143. [Google Scholar] [CrossRef]
- Liu, S.; Wang, L.; Liu, H.; Su, H.; Li, X.; Zheng, W. Deriving Bathymetry from Optical Images With a Localized Neural Network Algorithm. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5334–5342. [Google Scholar] [CrossRef]
- Niroumand-Jadidi, M.; Legleiter, C.J.; Bovolo, F. River Bathymetry Retrieval From Landsat-9 Images Based on Neural Networks and Comparison to SuperDove and Sentinel-2. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 5250–5260. [Google Scholar] [CrossRef]
- Zhu, J.; Qin, J.; Yin, F.; Ren, Z.; Qi, J.; Zhang, J.; Wang, R. An APMLP Deep Learning Model for Bathymetry Retrieval Using Adjacent Pixels. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 235–246. [Google Scholar] [CrossRef]
- Najar, M.A.; Benshila, R.; Bennioui, Y.E.; Thoumyre, G.; Almar, R.; Bergsma, E.W.J.; Delvit, J.-M.; Wilson, D.G. Coastal Bathymetry Estimation from Sentinel-2 Satellite Imagery: Comparing Deep Learning and Physics-Based Approaches. Remote Sens. 2022, 14, 1196. [Google Scholar] [CrossRef]
- Alevizos, E.; Nicodemou, V.C.; Makris, A.; Oikonomidis, I.; Roussos, A.; Alexakis, D.D. Integration of Photogrammetric and Spectral Techniques for Advanced Drone-Based Bathymetry Retrieval Using a Deep Learning Approach. Remote Sens. 2022, 14, 4160. [Google Scholar] [CrossRef]
- Ai, B.; Wen, Z.; Wang, Z.; Wang, R.; Su, D.; Li, C.; Yang, F. Convolutional Neural Network to Retrieve Water Depth in Marine Shallow Water Area from Remote Sensing Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 2888–2898. [Google Scholar] [CrossRef]
- Wilson, B.; Kurian, N.C.; Singh, A.; Sethi, A. Satellite-Derived Bathymetry Using Deep Convolutional Neural Network. In Proceedings of the IGARSS 2020–2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 2280–2283. [Google Scholar]
- Markus, T.; Neumann, T.; Martino, A.; Abdalati, W.; Brunt, K.; Csatho, B.; Farrell, S.; Fricker, H.; Gardner, A.; Harding, D.; et al. The Ice, Cloud, and Land Elevation Satellite-2 (ICESat-2): Science Requirements, Concept, and Implementation. Remote Sens. Environ. 2017, 190, 260–273. [Google Scholar] [CrossRef]
- Malambo, L.; Popescu, S. PhotonLabeler: An Inter-Disciplinary Platform for Visual Interpretation and Labeling of ICESat-2 Geolocated Photon Data. Remote Sens. 2020, 12, 3168. [Google Scholar] [CrossRef]
- Guo, X.; Jin, X.; Jin, S. Shallow Water Bathymetry Mapping from ICESat-2 and Sentinel-2 Based on BP Neural Network Model. Water 2022, 14, 3862. [Google Scholar] [CrossRef]
- Zhong, J.; Sun, J.; Lai, Z.; Song, Y. Nearshore Bathymetry from ICESat-2 LiDAR and Sentinel-2 Imagery Datasets Using Deep Learning Approach. Remote Sens. 2022, 14, 4229. [Google Scholar] [CrossRef]
- Yang, H.; Chen, M.; Wu, G.; Wang, J.; Wang, Y.; Hong, Z. Double Deep Q-Network for Hyperspectral Image Band Selection in Land Cover Classification Applications. Remote Sens. 2023, 15, 682. [Google Scholar] [CrossRef]
- Wang, J.; Chen, M.; Zhu, W.; Hu, L.; Wang, Y. A Combined Approach for Retrieving Bathymetry from Aerial Stereo RGB Imagery. Remote Sens. 2022, 14, 760. [Google Scholar] [CrossRef]
- Alevizos, E.; Oikonomou, D.; Argyriou, A.V.; Alexakis, D.D. Fusion of Drone-Based RGB and Multi-Spectral Imagery for Shallow Water Bathymetry Inversion. Remote Sens. 2022, 14, 1127. [Google Scholar] [CrossRef]
- Rossi, L.; Mammi, I.; Pelliccia, F. UAV-Derived Multispectral Bathymetry. Remote Sens. 2020, 12, 3897. [Google Scholar] [CrossRef]
- Evagorou, E.; Argyriou, A.; Papadopoulos, N.; Mettas, C.; Alexandrakis, G.; Hadjimitsis, D. Evaluation of Satellite-Derived Bathymetry from High and Medium-Resolution Sensors Using Empirical Methods. Remote Sens. 2022, 14, 772. [Google Scholar] [CrossRef]
- Zhang, D.; Guo, Q.; Cao, L.; Zhou, G.; Zhang, G.; Zhan, J. A Multiband Model With Successive Projections Algorithm for Bathymetry Estimation Based on Remotely Sensed Hyperspectral Data in Qinghai Lake. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 6871–6881. [Google Scholar] [CrossRef]
- Alevizos, E. A Combined Machine Learning and Residual Analysis Approach for Improved Retrieval of Shallow Bathymetry from Hyperspectral Imagery and Sparse Ground Truth Data. Remote Sens. 2020, 12, 3489. [Google Scholar] [CrossRef]
- Niroumand-Jadidi, M.; Bovolo, F.; Bruzzone, L. SMART-SDB: Sample-specific Multiple Band Ratio Technique for Satellite-Derived Bathymetry. Remote Sens. Environ. 2020, 251, 112091. [Google Scholar] [CrossRef]
- Cheng, L.; Ma, L.; Cai, W.; Tong, L.; Li, M.; Du, P. Integration of Hyperspectral Imagery and Sparse Sonar Data for Shallow Water Bathymetry Mapping. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3235–3249. [Google Scholar] [CrossRef]
- Cui, J.; Kong, W.; Zhang, X.; Chen, D.; Zeng, Q. DLSTM-Based Successive Cancellation Flipping Decoder for Short Polar Codes. Entropy 2021, 23, 863. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; Zhang, C.; Ma, J. CNN-LSTM Neural Network Model for Quantitative Strategy Analysis in Stock Markets. In Neural Information Processing; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2017; pp. 198–206. [Google Scholar]
- Ghasemlounia, R.; Gharehbaghi, A.; Ahmadi, F.; Saadatnejadgharahassanlou, H. Developing a Novel Framework for Forecasting Groundwater Level Fluctuations Using Bi-directional Long Short-Term Memory (BiLSTM) Deep Neural Network. Comput. Electron. Agric. 2021, 191, 106568. [Google Scholar] [CrossRef]
- Friedman, J.H. Greedy Function Approximation: A Gradient Boosting Machine. Ann. Stat. 2001, 29, 1189–1232. [Google Scholar] [CrossRef]
- Ghimire, S.; Yaseen, Z.M.; Farooque, A.A.; Deo, R.C.; Zhang, J.; Tao, X. Streamflow Prediction Using An Integrated Methodology Based on Convolutional Neural Network and Long Short-term Memory Networks. Sci. Rep. 2021, 11, 17497. [Google Scholar] [CrossRef] [PubMed]
- Peng, Y.; Liu, X.; Wang, W.; Zhao, X.; Wei, M. Image Caption Model of Double LSTM with Scene Factors. Image Vis. Comput. 2019, 86, 38–44. [Google Scholar] [CrossRef]
- Zhang, J.; Pei, Z.; Luo, Z. Reasoning for Local Graph Over Knowledge Graph With a Multi-Policy Agent. IEEE Access 2021, 9, 78452–78462. [Google Scholar] [CrossRef]
- PRISMA Data. Available online: https://prisma.asi.it/ (accessed on 15 September 2022).
- PRISMA User Manual. Available online: http://prisma.asi.it/missionselect/docs/PRISMA%20User%20Manual_Is1_3.pdf (accessed on 15 September 2022).
- ESA Copernicus Data Center. Available online: https://scihub.copernicus.eu/dhus/#/home (accessed on 15 September 2022).
- SNAP Download. Available online: http://step.esa.int/main/download/snap-download/ (accessed on 15 September 2022).
- Sentinel-2 User Handbook. Available online: https://sentinel.esa.int/documents/247904/685211/Sentinel-2_User_Handbook (accessed on 15 September 2022).
- Neumann, T.; Brenner, A.; Hancock, D.; Robbins, J.; Saba, J.; Harbeck, K. Ice, Cloud, and Land Elevation Satellite-2 (ICESat-2) Project: Algorithm Theoretical Basis Document (ATBD) for Global Geolocated Photons (ATL03). Available online: https://icesat-2.gsfc.nasa.gov/sites/default/files/files/ATL03_05June2018.pdf (accessed on 15 September 2022).
- Parrish, C.E.; Magruder, L.A.; Neuenschwander, A.L.; Forfinski-Sarkozi, N.; Alonzo, M.; Jasinski, M. Validation of ICESat-2 ATLAS Bathymetry and Analysis of ATLAS’s Bathymetric Mapping Performance. Remote Sens. 2019, 11, 1634. [Google Scholar] [CrossRef]
- Le, Y.; Hu, M.; Chen, Y.; Yan, Q.; Zhang, D.; Li, S.; Zhang, X.; Wang, L. Investigating the Shallow-Water Bathymetric Capability of Zhuhai-1 Spaceborne Hyperspectral Images Based on ICESat-2 Data and Empirical Approaches: A Case Study in the South China Sea. Remote Sens. 2022, 14, 3406. [Google Scholar] [CrossRef]
- Chen, Y.; Zhu, Z.; Le, Y.; Qiu, Z.; Chen, G.; Wang, L. Refraction Correction and Coordinate Displacement Compensation in Nearshore Bathymetry Using ICESat-2 Lidar Data and Remote-sensing Images. Opt. Express 2021, 29, 2411–2430. [Google Scholar] [CrossRef] [PubMed]
- Ester, M.; Kriegel, H.-P.; Sander, J.; Xu, X. A Density-based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. In Proceedings of the Second International Conference on Knowledge Discovery and Data Mining, Portland, OR, USA, 2–4 August 1996; pp. 226–231. [Google Scholar]
- NOAA Tides and Currents. Available online: https://tidesandcurrents.noaa.gov (accessed on 15 September 2022).
- Richards, B.L.; Smith, J.R.; Smith, S.G.; Ault, J.S.; Kelley, C.D.; Moriwake, V.N. A Five-meter Resolution Multi-Beam Bathymetric and Backskatter Synthesis for the Main Hawaiian Islands. Available online: http://www.soest.hawaii.edu/HMRG/multibeam/index.php (accessed on 15 September 2022).
- Smith, J.R. Multibeam Backscatter and Bathymetry Synthesis for the Main Hawaiian Islands, Final Technical Report; NOAA: Silver Spring, MD, USA, 2016; pp. 1–15. [Google Scholar]
- Chen, Y.; Le, Y.; Zhang, D.; Wang, Y.; Qiu, Z.; Wang, L. A Photon-counting LiDAR Bathymetric Method Based on Adaptive Variable Ellipse Filtering. Remote Sens. Environ. 2021, 256, 112326. [Google Scholar] [CrossRef]
- Asner, G.P.; Vaughn, N.R.; Balzotti, C.; Brodrick, P.G.; Heckler, J. High-Resolution Reef Bathymetry and Coral Habitat Complexity from Airborne Imaging Spectroscopy. Remote Sens. 2020, 12, 310. [Google Scholar] [CrossRef]
- Asner, G.P.; Vaughn, N.R.; Foo, S.A.; Shafron, E.; Heckler, J.; Martin, R.E. Abiotic and Human Drivers of Reef Habitat Complexity Throughout the Main Hawaiian Islands. Front. Mar. Sci. 2021, 8, 631842. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Schuster, M.; Paliwal, K.K. Bidirectional Recurrent Neural Networks. IEEE Trans. Signal Process. 1997, 45, 2673–2681. [Google Scholar] [CrossRef]
- Yuan, X.; Wang, X.; Han, J.; Liu, J.; Chen, H.; Zhang, K.; Ye, Q. A High Accuracy Integrated Bagging-Fuzzy-GBDT Prediction Algorithm for Heart Disease Diagnosis. In Proceedings of the 2019 IEEE/CIC International Conference on Communications in China (ICCC), Changchun, China, 11–13 August 2019. [Google Scholar]
- Friedman, J.H. Stochastic Gradient Boosting. Comput. Stat. Data Anal. 2002, 38, 367–378. [Google Scholar] [CrossRef]
- Cheng, J.; Li, G.; Chen, X. Research on Travel Time Prediction Model of Freeway Based on Gradient Boosting Decision Tree. IEEE Access 2019, 7, 7466–7480. [Google Scholar] [CrossRef]
- Song, Y.; Niu, R.; Xu, S.; Ye, R.; Peng, L.; Guo, T.; Li, S.; Chen, T. Landslide Susceptibility Mapping Based on Weighted Gradient Boosting Decision Tree in Wanzhou Section of the Three Gorges Reservoir Area (China). ISPRS Int. J. Geo. Inf. 2018, 8, 4. [Google Scholar] [CrossRef]
- Zhang, Z.; Jung, C. GBDT-MO Gradient-Boosted Decision Trees for Multiple Outputs. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 3156–3167. [Google Scholar] [CrossRef]
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A Simple Way to Prevent Neural Networks from Overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. In Proceedings of the the 3rd International Conference for Learning Representations (ICLR), San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Liu, Y.; Tang, D.; Deng, R.; Cao, B.; Chen, Q.; Zhang, R.; Qin, Y.; Zhang, S. An Adaptive Blended Algorithm Approach for Deriving Bathymetry from Multispectral Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 801–817. [Google Scholar] [CrossRef]
- Vahtmäe, E.; Kutser, T. Airborne Mapping of Shallow Water Bathymetry in the Optically Complex Waters of the Baltic Sea. J. Appl. Remote Sens. 2016, 10, 025012. [Google Scholar] [CrossRef]
- Chénier, R.; Faucher, M.-A.; Ahola, R. Satellite-Derived Bathymetry for Improving Canadian Hydrographic Service Charts. ISPRS Int. J. Geo-Inf. 2018, 7, 306. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Parameters | |||||
|---|---|---|---|---|---|---|
| Depth | LSTM Units | Activation Function | Loss Function | Optimizer | Others | |
| DLSTM | 2 | 128 | tan h | MSE | Adam | Dropout = 0.5 |
| CNN-LSTM | ReLU | Filters = 160, Kernel size = 1, Dropout = 0.5 | ||||
| BiLSTM | tan h | Dropout = 0.5 | ||||
| PRISMA Band | Wavelength (nm) | Sentinel-2 Band | Wavelength (nm) |
|---|---|---|---|
| 63–66 | 400–432 | ||
| 60–62 | 432–452 | 1 | 433–453 |
| 51–59 | 452–521 | 2 | 458–523 |
| 48–50 | 521–542 | ||
| 44–47 | 542–575 | 3 | 543–578 |
| 36–43 | 575–647 | ||
| 32–35 | 647–685 | 4 | 650–680 |
| 31 | 685–696 | ||
| 29–30 | 696–716 | 5 | 698–713 |
| 27–28 | 716–736 | ||
| 26 | 736–745 | 6 | 733–748 |
| 23–25 | 745–778 | ||
| 21–22 | 778–799 | 7 | 773–793 |
| 11–22 | 778–905 | 8 | 785–900 |
| 8–10 | 905–935 | ||
| 6–7 | 935–958 | 9 | 935–955 |
| 4–5 | 958–979 | ||
| 129–131 (SWIR) | 1355–1387 | 10 | 1360–1390 |
| 104–112 (SWIR) | 1558–1654 | 11 | 1565–1655 |
| 32–54 (SWIR) | 2098–2279 | 12 | 2100–2280 |
| ATL03 Strip Date | Time (UTM) | Track Used | Geographic Coordinates |
|---|---|---|---|
| 20191101 | 7:35 | GT1R | −156°49′06″W, 21°02′39″N− −156°49′17″W, 21°03′40″N |
| 20210928 | 22:18 | GT2R | −156°50′42″W, 21°02′15″N− −156°50′47″W, 21°03′06″N |
| 20220126 | 16:34 | GT1L | −156°44′16″W, 21°06′09″N− −156°44′20″W, 21°06′50″N |
| 20220203 | 4:23 | GT1L | −156°46′51″W, 21°04′44″N− −156°46′57″W, 21°03′45″N |
| 20220427 | 12:14 | GT1L | −156°47′02″W, 21°03′42″N− −156°47′02″W, 21°03′42″N |
| 20220727 | 7:54 | GT2R | −156°46′03″W, 21°04′18″N− −156°46′10″W, 21°05′22″N |
| ATL03 Strips | Points | Depth before Correction (m) | Depth after Correction (m) | Depth Reference (m) | |||
|---|---|---|---|---|---|---|---|
| Min | Max | Min | Max | Min | Max | ||
| 20191101GT1R | 1591 | 0.61 | 32.42 | 0.41 | 21.97 | 0.52 | 21.98 |
| 20210928GT2R | 855 | 0.59 | 20.88 | 0.23 | 15.36 | 0.74 | 15.31 |
| 20220126GT1L | 259 | 0.62 | 34.21 | 0.48 | 25.54 | 1.38 | 21.21 |
| 20220203GT1L | 418 | 0.89 | 29.45 | 0.03 | 21.32 | 0.16 | 20.76 |
| 20220427GT1L | 327 | 1.04 | 29.21 | 0.32 | 21.36 | 0.38 | 21.27 |
| 20220727GT2R | 691 | 0.51 | 33.40 | 0.34 | 22.38 | 0.78 | 22.36 |
| Model | Satellite Image | Train:Test (Points) | Band | Band Ratio | R2 | RMSE (m) |
|---|---|---|---|---|---|---|
| Stumpf | PRISMA | 2542:1600 | 54/50 | 0.82 | 1.98 | |
| DLSTM | all 63 bands | 0.97 | 0.79 | |||
| CNN-LSTM | 0.96 | 1.00 | ||||
| BiLSTM | 0.97 | 0.94 | ||||
| BoBiLSTM | 30,35,36,37,38,42,43,44,47, 50,51,53,54,58,59,60,64,65,66 | 42/58,50/54 | 0.97 | 0.82 | ||
| Stumpf | Sentinel-2 | 0.81 | 1.97 | |||
| DLSTM | all 12 bands | 0.92 | 1.43 | |||
| CNN-LSTM | 0.94 | 1.54 | ||||
| BiLSTM | 0.95 | 1.50 | ||||
| BoBiLSTM | 2,3,4 | 3/2 | 0.95 | 1.08 |
| Model | Satellite Image | Train:Test (Points) | Bands | Band Ratio | R2 | RMSE (m) |
|---|---|---|---|---|---|---|
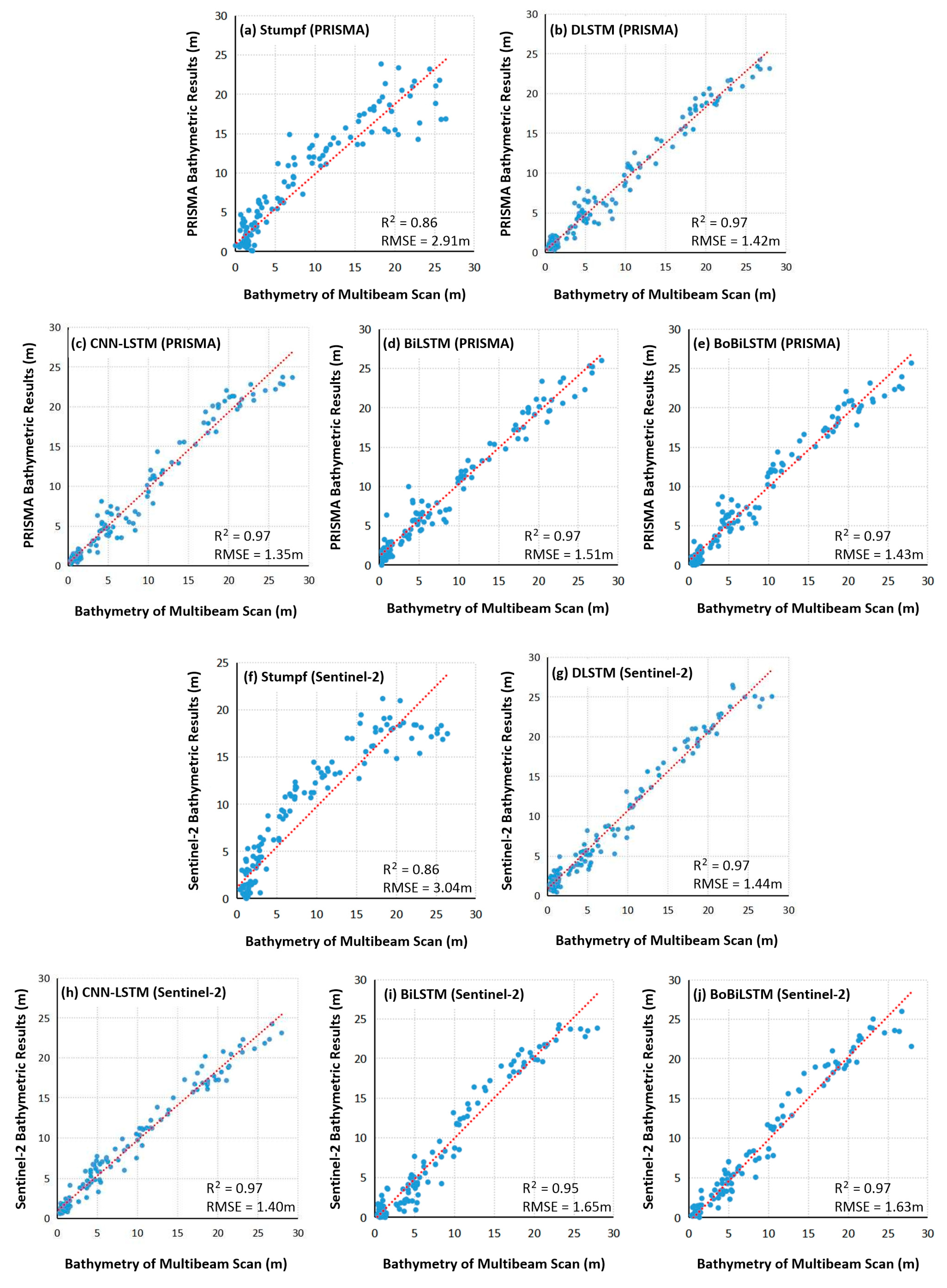
| Stumpf | PRISMA | 601:150 | 56/49 | 0.86 | 2.91 | |
| DLSTM | all 63 bands | 0.97 | 1.42 | |||
| CNN-LSTM | 0.97 | 1.35 | ||||
| BiLSTM | 0.97 | 1.51 | ||||
| BoBiLSTM | 7,27,40,41,42,43,44,45, 46,47,48,49,54,56,62,63, 64,65 | 49/56,43/54, 44/54 | 0.97 | 1.43 | ||
| Stumpf | Sentinel-2 | 3/2 | 0.84 | 3.06 | ||
| DLSTM | all 12 bands | 0.97 | 1.44 | |||
| CNN-LSTM | 0.97 | 1.40 | ||||
| BiLSTM | 0.95 | 1.65 | ||||
| BoBiLSTM | 2,3,4 | 3/2 | 0.97 | 1.63 |
| Model | Satellite Image | Dataset | Train:Test (Points) | Bathymetric Points | Max Predicted Depth (m) | RMSE (m) |
|---|---|---|---|---|---|---|
| DLSTM | PRISMA | ICESat-2 | 2542:1600 | 42,503 | 29.86 | 2.81 |
| CNN-LSTM | 42,509 | 9.84 | 7.34 | |||
| BiLSTM | 41,772 | 22.61 | 2.91 | |||
| BoBiLSTM | 40,466 | 29.91 | 2.72 | |||
| DLSTM | Multibeam | 601:150 | 42,509 | 16.96 | 7.03 | |
| CNN-LSTM | 42,509 | 16.36 | 6.55 | |||
| BiLSTM | 42,419 | 28.92 | 5.44 | |||
| BoBiLSTM | 41,845 | 27.87 | 2.35 | |||
| DLSTM | Sentinel-2 | ICESat-2 | 2542:1600 | 42,473 | 16.15 | 2.86 |
| CNN-LSTM | 42,473 | 22.44 | 2.47 | |||
| BiLSTM | 42,164 | 21.05 | 3.25 | |||
| BoBiLSTM | 42,453 | 17.15 | 2.54 | |||
| DLSTM | Multibeam | 601:150 | 42,489 | 7.60 | 6.74 | |
| CNN-LSTM | 42,489 | 4.94 | 6.60 | |||
| BiLSTM | 42,489 | 4.10 | 7.79 | |||
| BoBiLSTM | 42,487 | 29.06 | 3.13 |
| Model | Satellite Image | Dataset | Train:Test (Points) | Bathymetric Points | Depth Range (m) | RMSE (m) | Required Accuracy (±m) | CAT-ZOC |
|---|---|---|---|---|---|---|---|---|
| BoBiLSTM | PRISMA | ICESat-2 | 2542:1600 | 1048 | 0–10 | 0.66 | 0.6 | A1 |
| 249 | 10–30 | 1.41 | 1.6 | A2 & B | ||||
| Multibeam | 601:150 | 45 | 0–10 | 1.20 | 1.2 | A2 & B | ||
| 81 | 10–30 | 1.82 | 1.6 | A2 & B |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xi, X.; Chen, M.; Wang, Y.; Yang, H. Band-Optimized Bidirectional LSTM Deep Learning Model for Bathymetry Inversion. Remote Sens. 2023, 15, 3472. https://doi.org/10.3390/rs15143472
Xi X, Chen M, Wang Y, Yang H. Band-Optimized Bidirectional LSTM Deep Learning Model for Bathymetry Inversion. Remote Sensing. 2023; 15(14):3472. https://doi.org/10.3390/rs15143472
Chicago/Turabian StyleXi, Xiaotao, Ming Chen, Yingxi Wang, and Hua Yang. 2023. "Band-Optimized Bidirectional LSTM Deep Learning Model for Bathymetry Inversion" Remote Sensing 15, no. 14: 3472. https://doi.org/10.3390/rs15143472
APA StyleXi, X., Chen, M., Wang, Y., & Yang, H. (2023). Band-Optimized Bidirectional LSTM Deep Learning Model for Bathymetry Inversion. Remote Sensing, 15(14), 3472. https://doi.org/10.3390/rs15143472