2. Literature Review
Intelligent driving systems have become increasingly common in road traffic, and the technology is maturing. In-vehicle perception sensors are a crucial component of intelligent driving systems and include lidar, millimeter-wave radar, and vision sensors [
1,
2,
3]. While cameras and lidar have limitations under certain weather conditions such as rain, snow, fog, and dense dust, millimeter-wave radar’s robustness under harsh conditions is unmatched [
4]. Millimeter-wave radar uses the Doppler effect to detect the speed of obstacles accurately, making it much more accurate than other sensors of the same type. It can also be used for self-attitude and speed estimation [
5]. By processing the target points detected by the millimeter-wave radar through clustering [
6,
7], shape and attitude estimation [
8], and boundary fitting [
9], information such as the distance, orientation, size, attributes, and collision risk of the target can be obtained. As a result, millimeter-wave radar is widely used in the field of automotive autonomous driving. Given the remarkable performance of millimeter-wave radar in the automotive field, it is anticipated that the detection technology of millimeter-wave radar will further improve the active safety operation capability of rail transit.
The high speed and mass of trains result in long emergency braking distances that necessitate a greater perceived distance for safe operation. This distance is crucial in emergency situations such as signal failures or rockslides blocking railway tracks, where trains must be stopped before colliding. However, current millimeter-wave radar systems used in commercial rail vehicles have a limited resolution and detection range, making it challenging to meet the long-distance target detection needs of trains. Several scientific research teams have conducted research on the application of radar systems in rail transit. For example, roadside millimeter-wave radars are used to detect trains along the line [
10]. However, this method faces the same signal failure risks as the railway communication system mentioned above because the millimeter-wave radar is not installed on the train. Another promising development is the K-band long-range radar system proposed by Liu et al., which has the advantage of overcoming angular ambiguity, but its large size and insufficient operating frequency limit its use in mobile platforms [
11]. Given the limitations of existing radar systems, there is a need for further research and development of radar detection technology that can meet the long-distance road boundary and target detection needs of trains.
With advancements in radar technology, the latest 4D radar is capable of generating point cloud data similar to lidar, which contains rich Doppler information and has all-weather capabilities [
12,
13]. The use of multiple-input multiple-output (MIMO) technology and binary phase-shift keying (BPSK) encoding in 4D radar allows for the transmission of signals to obtain elevation information [
14], making it useful in applications such as road edge height estimation and drainage manhole cover detection. Additionally, the use of deep learning and artificial intelligence has become widespread in various fields, including target classification research based on millimeter-wave radar [
15,
16]. While the effectiveness of such research in short-distance areas with dense millimeter-wave radar point clouds is good [
17,
18,
19], it is not ideal in long-distance sparse point clouds. As a result, there is currently a lack of long-range, high-resolution millimeter-wave radars for rail transit applications, along with the associated algorithms for rail transit boundary fitting and boundary-based target detection.
To achieve high-precision detection of long-distance targets by trains, this paper proposes a long-distance perception system based on millimeter-wave radar. The system is designed to detect road boundaries and trains running ahead using a customized set of long-distance, high-resolution millimeter-wave radars suitable for rail transit. Firstly, the paper constructs the theory of multipath scattering in complex scenes such as rail transit tunnels and fences and adopts a method based on azimuth scattering characteristics to further eliminate radar false detections. Secondly, the paper proposes a set of self-running speed calculation methods, which divides the radar detection point cloud into static target point clouds and dynamic target point clouds based on the ego-velocity of the train. Then, the static target point clouds are used to realize the stable extraction and fitting of the road boundary, and all obstacles within the road boundary and other areas of interest are detected, so as to accurately determine whether the perceived target has a collision risk, ultimately improving driving safety. The paper presents several contributions of the proposed system:
- (1)
The theory of multipath scattering in complex scenes such as rail transit tunnels and fences is established, and the radar false detections that are stronger or closer to the real point clouds were further eliminated by using the azimuth scattering characteristics.
- (2)
To accurately predict possible collisions, a set of ego-velocity estimation strategies of the train is proposed to separate targets with different velocities.
- (3)
The system designed in this paper also presents a road boundary feature point extraction and target detection method suitable for rail transit. The proposed methods are capable of detecting road boundaries at a distance greater than 400 m, and the system demonstrated reliable detection of the train ahead.
- (4)
A set of high-resolution, long-distance millimeter-wave radar adapted to the rail transit environment was customized, with a detection range of more than 500 m, and it was loaded and operated on the train. The performance of the remote detection system was evaluated using train line operation data collected over a year, covering a variety of scenarios, weather, and speeds.
4. Rail Transit Scattering Analysis and False Detection Identification
Rail transit operating environments often have many tunnels, and to ensure the exclusive right of way, the road boundaries are typically isolated by fences. However, when using millimeter-wave radar to detect targets in such environments, the electromagnetic waves will have multiple reflection paths, resulting in radar false detections. This problem is particularly pronounced when there are few objects in the detection environment [
20]. In existing studies, methods such as tracking and clustering algorithms have been used to filter out most clutter points effectively [
21,
22]. However, these methods struggle to filter out radar false detections that are stronger than the real point clouds, and there is a need for a new filtering method. To address this issue, we propose the theory of radar multipath scattering in rail transit environments and studied the difference between the generation mechanism of radar false detection and true detection, as well as their influence on radar boundary detection. This approach prevents radar false detection points from interfering with boundary and target detection.
Radar electromagnetic scattering can be divided into single reflection and multiple reflections in closed spaces such as tunnels [
23,
24]. Multiple reflections can lead to false detections.
Figure 2 shows a typical scattering path formed by the target and the plane of the tunnel or metal guardrail, resulting in a similar dihedral reflection situation. Single-bounce scattering occurs when the transmitting and receiving path is
L1→
L1, as shown by the black path in the figure. The detection range of a single reflection of the target is L
1. However, in the case of two or more reflections, the transmitting and receiving path is
L2→
n ×
L3→
L4, where n is the number of reflections between the target and the plane of the tunnel or metal guardrail. The detection distance of two or more reflections of the target can be calculated using the following equation.
where (
n − 1) ×
L3/2 is the additional deviation distance caused by multiple reflections, which makes the radar detect false point clouds.
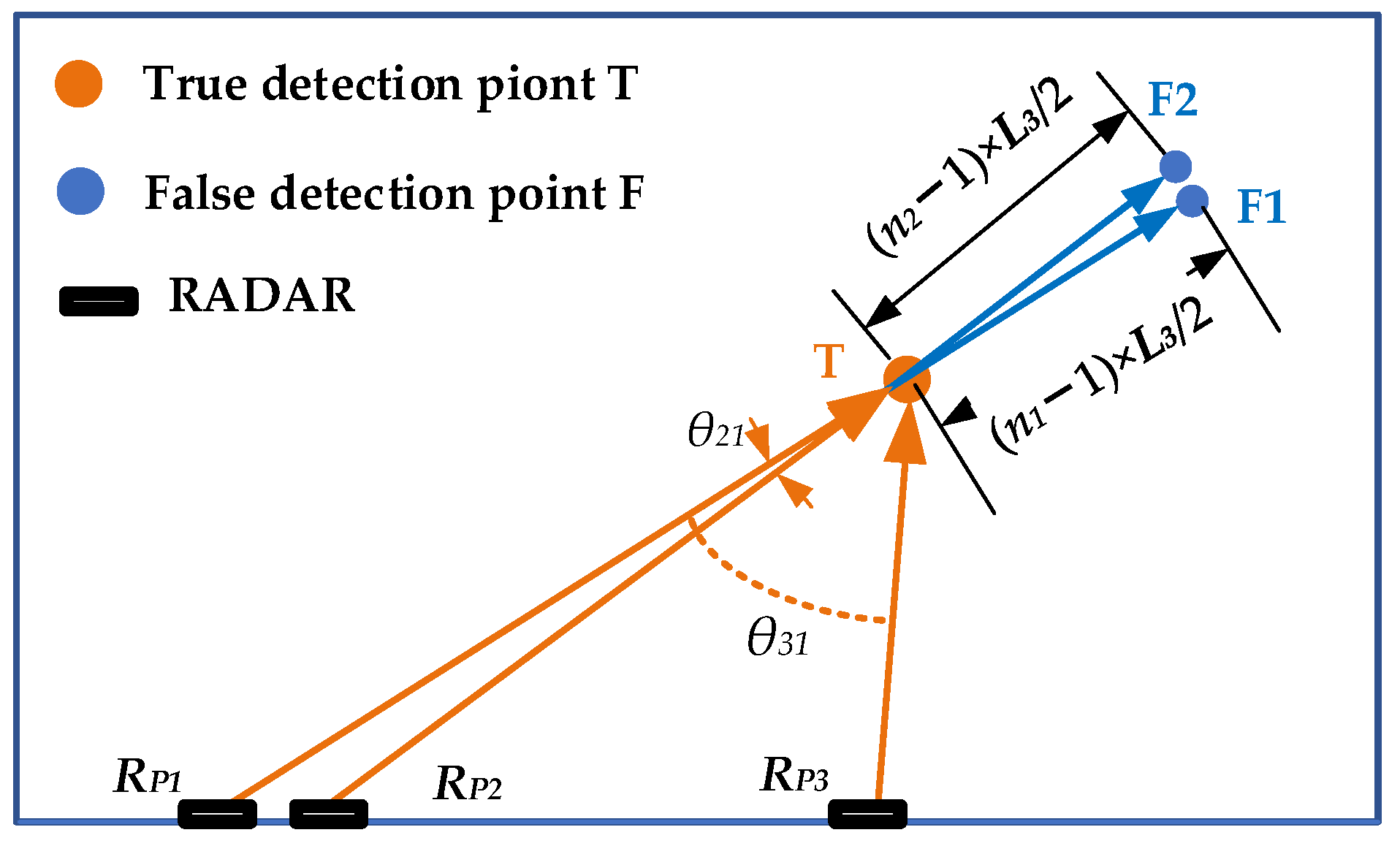
Figure 3 shows the difference in the radar point cloud detected by the same target during the radar movement from R
P1 to R
P3. The assumption was made that the radar detects the real position T of the target at RP
1 for the first time and the false detection position F1 of the target for the first time. Furthermore, the radar detects the real position T of the target at the R
P2 position and the false detection position F2 that the target is detected for the last time. Finally, the radar detects the real location T of the target at the R
P3 position for the last time. It can be seen from Equation (1) that the false detection distance is longer than the real distance in the direction of the radar. Moreover, the false detections cannot overlap together like the T point. These false detections can interfere with the extraction of road boundary feature points and target detection, especially the impact on the seed points used during the road boundary feature point extraction process.
The azimuth scattering angle is a range within which the radar can detect a target [
25]. As shown in
Figure 3, the azimuth scattering angle of the false detection point is denoted as θ
21, while the azimuth scattering angle of the real target point is denoted as θ
31. In the rail transit scene, it was observed that the azimuth scattering angle range of the real point is greater than zero. For instance, the convex surface formed by the car body and the horizontal wall in
Figure 2 can be regarded as a typical dihedral angle, which can be observed within the azimuth range covered by our radar. However, the azimuth scattering angle range θ
21 of false detection points is 0 or very close to 0. This indicates that there is a significant difference in the azimuth scattering angle between the false detection point and the real detection point. It is important to note that the points filtered out by this method are not all false detection points [
25]. For example, some points could be caused by the angular accuracy measurement error of the radar itself, while others may be related to the environmental field of view [
26].
Therefore, instead of blindly filtering out these points, it is necessary to dynamically adjust the threshold of azimuth filtering false detection points based on the point cloud distribution characteristics. By doing so, we can retain more reliable radar detection points while still filtering out false detections. This approach can lead to an increase in point cloud density, which can further reduce the errors in the process of road boundary detection and target perception.
5. Ego-Velocity Calculation and Separation of Dynamic and Static Targets
The study conducted by Cho et al. used frequency-modulated continuous wave (FMCW) scanning radar to achieve accurate motion estimation alone. However, their approach did not account for interference scenarios where a large number of moving targets exist at the same speed, such as when a long train passes by an adjacent track [
5].
To address this limitation, we propose a new method for calculating ego-velocity for rail transit. This method can distinguish dynamic objects from static environment objects based on their ego-velocity. The target velocity detected by the millimeter-wave radar is typically the radial velocity of the target relative to the radar, which is the velocity in the direction of the line between the radar and the target, as shown in
Figure 4.
As shown in
Figure 4, assuming that the relative ground velocity of the object is
and the angle between
and the radial direction of the radar is
, then the radial velocity of the radar, denoted as
, can be calculated:
Similarly, assuming that the relative ground velocity of the train is
and the angle between
and the radar radial direction is
, then the radial velocity of the radar
can be calculated:
From the addition of the relative velocity vectors in the radial direction, we can know the measured velocity
of the radar to a certain target:
When the object detected by the train is a stationary object,
is 0, that is
is 0, and Equation (1) can be simplified as:
From Equations (2) and (4), it can be obtained that the train speed
can be calculated by the
i-th target:
Therefore, in order to determine the ego-velocity of a train, it is necessary to obtain the radar measurement speed of the stationary object and the angle
between the direction of the line between the stationary object and the radar and the normal direction of the radar emitting surface. This angle
is the angle between
and the radial direction of the radar mentioned above. For all static obstacles, the
calculated by Equation (6) should be equal. However, due to measurement errors, the calculated
may fluctuate within a certain threshold in actual scenarios. In the context of rail traffic scenarios, most of the obstacles that the radar can detect are static obstacles in most scenarios. To obtain the velocity at which the maximum number of radar point clouds have the same velocity, the mode is used. Ideally, all radar points reflected by the same object should have the same magnitude and direction of velocity. However, in practical scenarios, measurement errors can lead to slight differences in velocity even for multiple radar points reflected by the same object. Hence, the process of finding the mode speed is divided into three steps when the current vehicle speed is unknown. Firstly, all radar points are sorted in ascending order of speed. Secondly, starting from the radar reflection point with the minimum speed, radar points within the range of
v0 +
delta_
v are obtained using
delta_
v as the threshold. The average speed vi of these radar points is then computed, and new radar points are searched within the range of
vi +
delta_
v. This process is repeated until all radar point clouds have been traversed. All previously found radar points are recorded and stored in set
Mi, along with the number of points
ki. Finally, the set with the largest
ki is identified, and the average speed in the set is taken as the mode speed. Therefore, the simplest way to calculate the train speed is to find the mode of all speeds
of all targets calculated by Equation (6). The result obtained after taking the mode is the train’s speed, as shown in Equation (7).
Although the principles mentioned above are generally reliable for determining the ego-velocity of a train, there are exceptions in the rail transit scenario. For example, when a train passes by an adjacent track, the reflection points detected on one side of the radar field of view all come from this passing train at the same speed. In this case, it is possible that the number of radar points reflected by this passing train exceeds half of all detected radar points, so that the points reflected by this passing train may be mistaken for stationary points. This can lead to inaccuracies in the calculation of the train speed obtained by taking the mode.
To avoid the issues mentioned above and improve the accuracy of the calculated train speed, there are two approaches that can be taken. The first approach is to filter out certain areas to reduce the impact of dynamic obstacles on the results. According to the characteristics of the rail transit scenarios, relatively large dynamic obstacles are mainly trains on adjacent tracks. Thus, to ensure that most of the candidate points are stationary points, points in the adjacent track area can be filtered out based on specific rules before taking the mode of the velocity of the obstacle reflection point. In this regard, a relatively simple filtering rule can be adopted based on the small field of view of the radar and the large radius of curvature of the track. Assuming that the front of the radar is the direction of the x-axis of the coordinate system and the left of the radar is the direction of the y-axis, all points within the range of and on both sides of the radar can be filtered out according to the rules. Here, is the area including the adjacent track on the right and is the area including the adjacent track on the left (the left side of the positive line is generally a fence). The condition should be satisfied. By reasonably setting the parameters to select candidate points, the best results can be obtained.
The second approach to avoid mismeasurement of ego-velocity is based on the continuity assumption of the train’s ego-velocity. The false detection of ego-velocity occurs when most candidate points change from stationary points to detected moving train points on adjacent tracks within a certain period of time. To exclude the influence of moving train points on adjacent tracks, the static target candidate points of each frame can be screened again, assuming that the rail vehicle speed changes relatively steadily for a period of time. When the speed of the rail vehicle does not change suddenly, the speed of the stationary obstacle does not change suddenly, then the speed of the stationary targets in the next frame should be within the range of . Obstacles outside this speed range can be filtered out, ensuring that the majority of candidate points in each frame are static points.
The specific steps of the speed measurement algorithm are shown in
Figure 5:
The two steps of area filtering and speed filtering can ensure the accuracy of the radar’s ego-velocity detection effectively. After the train’s speed is obtained, the moving target and the stationary target can be separated according to the train’s speed.
6. Road Boundary Detection and Collision Warning
6.1. Extraction and Fitting of Road Boundary Feature Points
After realizing the separation of the moving target point and the static target point, the road boundary points can be extracted from the static target point. These boundary points are the reflection points of objects detected by the radar with certain regular distribution, such as guardrails, and are roughly distributed on the left and right parallel curves in the radar image. Therefore, the road boundary points can be extracted through the distribution characteristics of the boundary points. To extract these road boundary points, a two-step process is followed:
- (1)
Multi-frame radar data superposition: In order to improve the amount of data and reduce the missed detection rate of millimeter-wave radar, it is essential to superimpose continuous multi-frame radar data. The process of superimposing data increases the point density, which is important for accurate detection. Selecting the appropriate number of frames for continuous superimposition is crucial as it affects the overall performance of the system. The number of frames to be superimposed should be selected based on the number of radar point clouds returned per frame and the search threshold of seeds. If the number of superimposed frames is too small, the point density after superimposition will not be enough, whereas selecting too many frames will not significantly improve the results, but will increase the computational cost. Based on our experience with real vehicle testing, we selected six overlapping frames.
- (2)
Boundary feature point extraction: According to the longitudinal distance (that is, the forward direction of the train), the target points are traversed from near to far, as the seed point set , where . According to the abscissa of the seed point, it is divided into left seed point set and right seed point set , which are processed separately (for the convenience of description, left and right are not distinguished for the time being). Let be the first starting point of seed point , and let be the j-th starting point. Using each as a starting point, search for other target points within the fan-shaped area in the longitudinal direction a few meters ahead. If there are more than one other target point, the average coordinate point of one or more target points is used as the next starting point , until no other obstacle points can be found, forming a point set , wherein the direction of the center line of the fan-shaped area corresponding to the first starting point is along the direction of train travel and the direction of the center line of the fan-shaped area corresponding to the j + 1-th starting point is the direction of the line from to . After the traversal, the point set and composed of several groups of candidate point sets on the left and right can be obtained. The point set with the largest number of points is selected from the left and right point sets, respectively. For example, the p-th point set in the left point set is used as the left feature point set , and the q-th point set in the right point set is used as the right feature point set . Based on the spatial characteristics of these two sets of feature point sets, the extracted points should roughly be in two columns on the left and right. In the rail traffic scenario, only the fence points usually meet the conditions among the targets arranged in two rows that can be detected by the millimeter-wave radar. Therefore, this step can extract boundary points. After extracting the boundary points in the rail transit scene, curve fitting can be performed according to the feature point sets distributed in the left and right columns to obtain the boundary of the drivable area in front of the train.
6.2. Train Detection and Recognition
The density-based spatial clustering of applications with noise (DBSCAN) method is commonly used to group millimeter-wave radar detection target points with similar speed, distance, and angle into the same cluster. However, it is primarily utilized in road scenes [
6,
7]. To account for the unique characteristics of the rail transit environment, modifications have been made to DBSCAN in two aspects. First of all, given that the train points detected by the millimeter-wave radar are mainly arranged along the longitudinal direction (i.e., the
x direction), the distance between detection points of the same obstacle in the
x direction will be comparatively large, while the
y direction will be denser. As a result, different weights (
a and
b) are assigned in the
x and
y directions, respectively, as shown in Formula (8):
The weights are adjusted such that a < b. In this case, will be more influenced by the distance in the y direction than in the x direction, which is also consistent with the difference of the obstacle reflection point in the x and y directions.
In addition to using the Euclidean distance in space as a distance criterion, the “distance” in the velocity dimension can also be used as a distance criterion to distinguish objects with similar spatial distances, but different speeds. Here, the obstacle point can be expressed as .
Similarly, we took into account the difference between the radar speed measurement in the
x and the
y directions by adding weights
c and
d, respectively.
In practice, the accuracy of radar speed measurements in the x direction is typically higher than in the y direction. Therefore, when testing, only the speed in the x direction is considered.
Introducing the weights and the neighborhood distance of the speed dimension, the DBSCAN algorithm can effectively separate different obstacles at numerous target points, including the trains, which require further identification.
Based on the clustered shape estimation, speed characteristics, and the positional relationship between the target and the boundary, it is comprehensively judges whether the target is a train. For instance, when an opposing train is running straight, it is generally represented as a group of points distributed longitudinally along the
x direction in the radar image. When driving on a curve, the distribution of train points is a group of points with a small degree of curvature, roughly distributed along the
y direction due to the track’s large radius of curvature. The width from the bounding border in the
x direction is approximately half the width of the left and right bounding lines. Additionally, the shape features of the point cloud returned by the train can distinguish it from other obstacles. In this study, the bounding box algorithm is employed to estimate the shape of a group of cluster points to obtain a rectangle [
8], and the aspect ratio of the rectangle is used to determine whether the target is a train.
6.3. Collision Warning
In rail traffic scenarios, the distance between the track and the road boundary usually falls within a certain range of values. After identifying the opposite train, the distance from the train point to the boundary fence can be determined by calculating the distance from cluster points belonging to the opposite train to the road boundary. Typically, the distance from the oncoming train to the left boundary is calculated because the right boundary may be occluded when the object comes to the train. If the calculated distance is longer than a certain value, it can be considered that the train point does not invade the track where the rail vehicle is located. In addition, trains on the main line all run on the left side. Therefore, if the speed of the detected train is opposite that of the ego-train, it can be inferred that it has not invaded the track where the ego-train is located, indicating that the travel of both trains is safe.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}