


Augmented Gravity Field Modelling by Combining EIGEN_6C4 and Topographic Potential Models
Abstract

1. Introduction
2. Datasets and Methodology
2.1. Datasets
2.1.1. Global Gravity Field Models
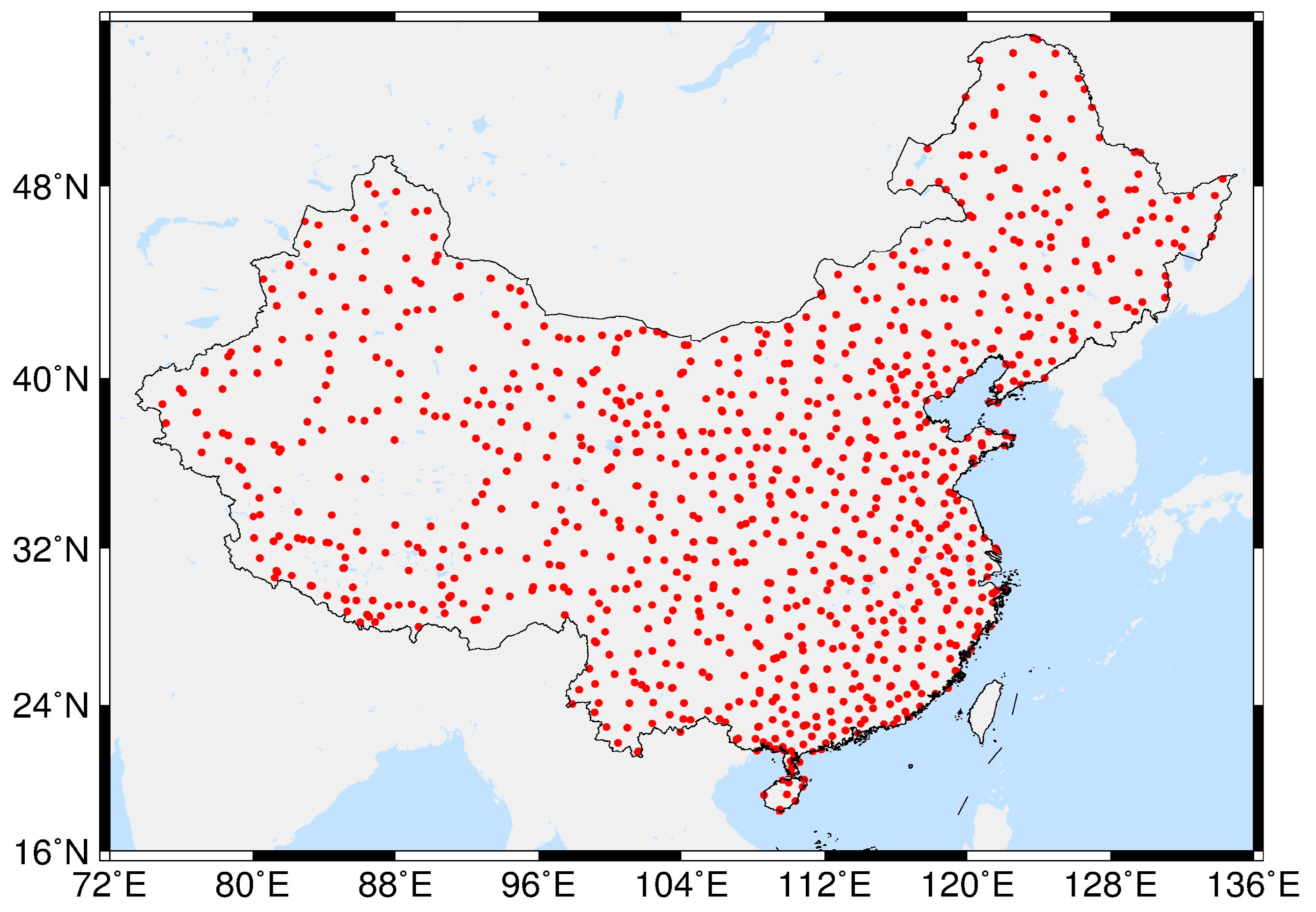
2.1.2. GNSS/Levelling Data
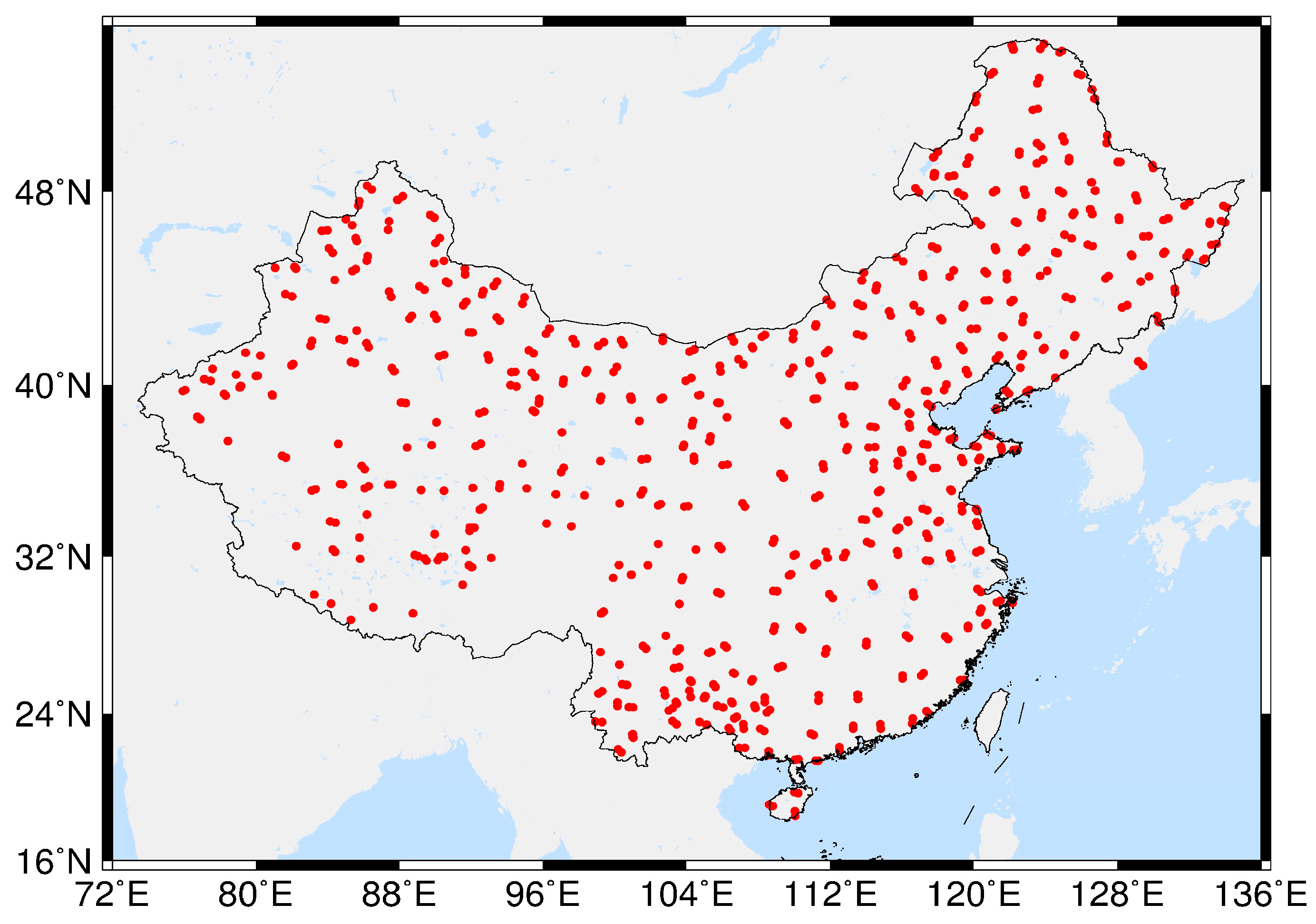
2.1.3. Deflection of the Vertical (DOV) Data
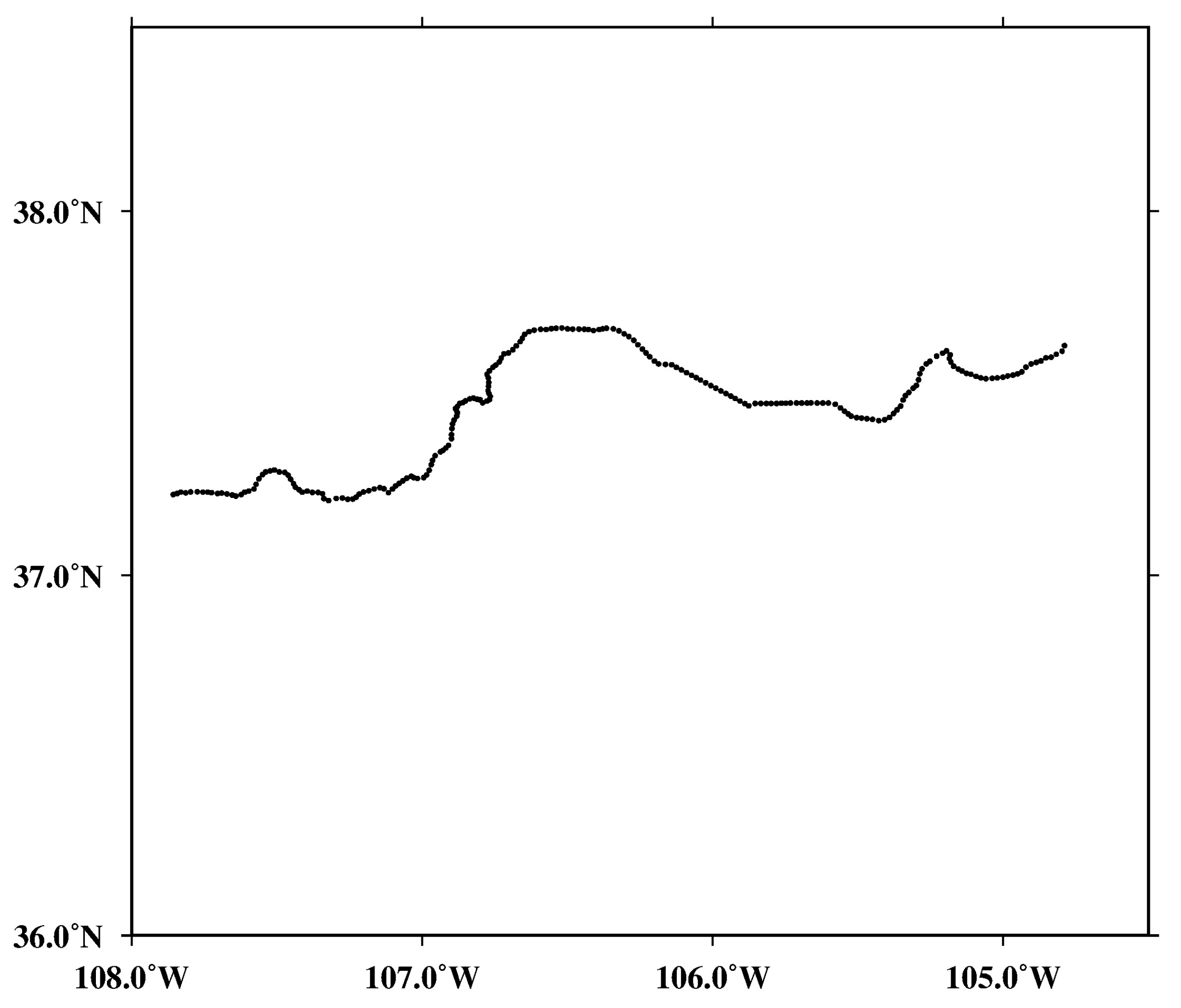
2.1.4. Gravity Data
2.2. Methodology
2.2.1. Method for Determining the Augmented Gravity Field Models
2.2.2. Spectral Evaluations of Gravity Field Models
3. Results
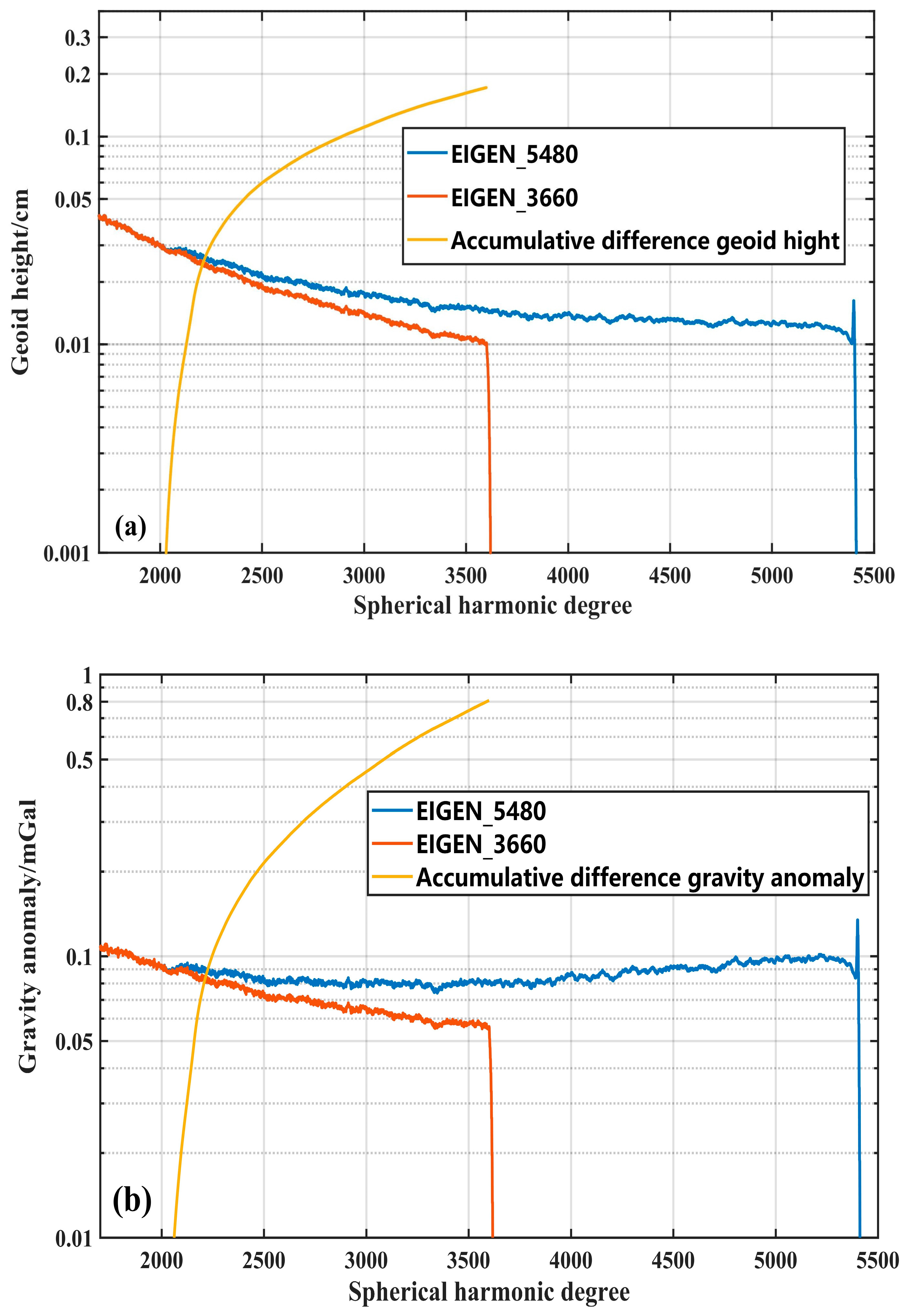
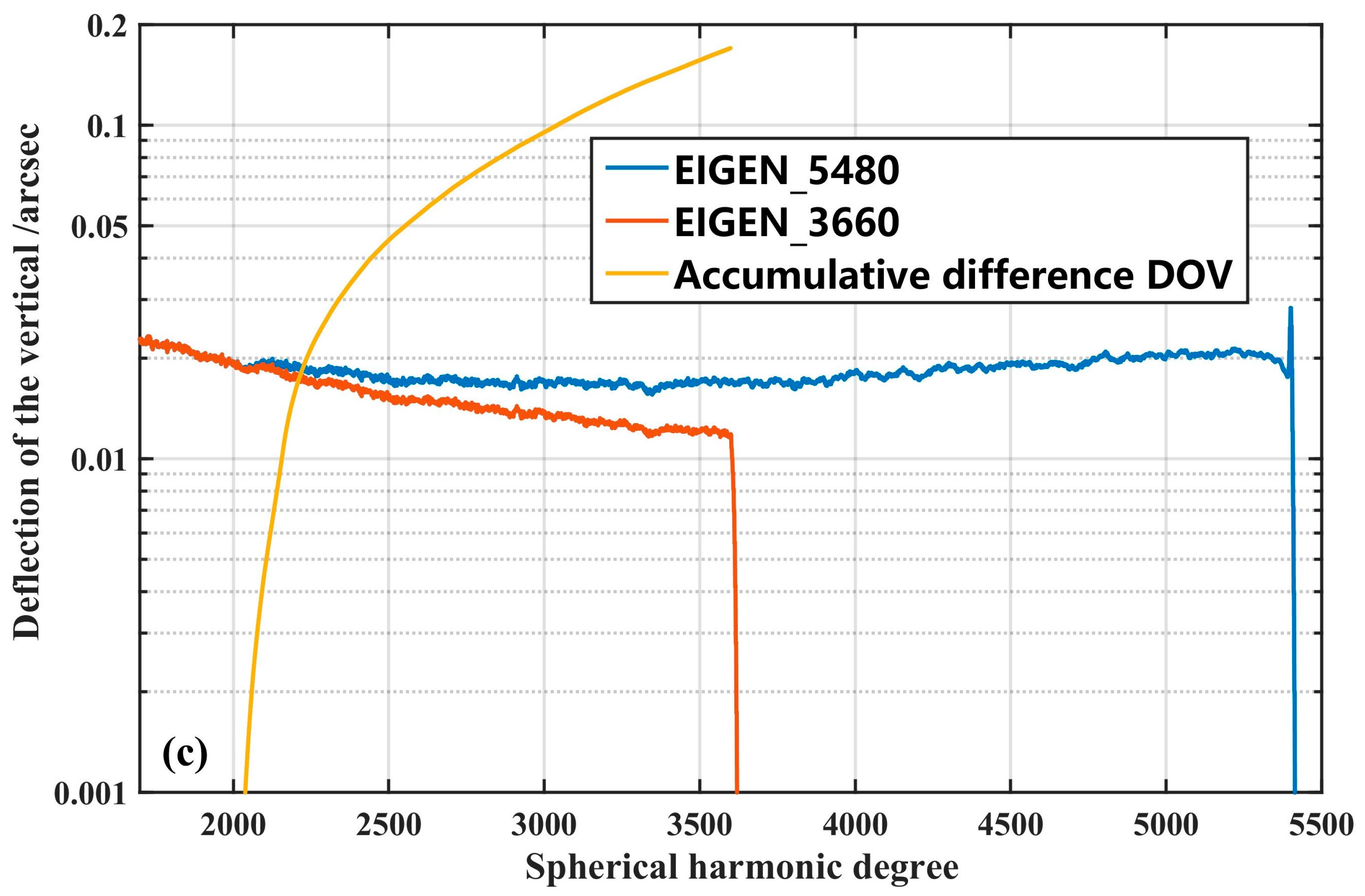
3.1. Spectral Accuracy Analysis of GFMs
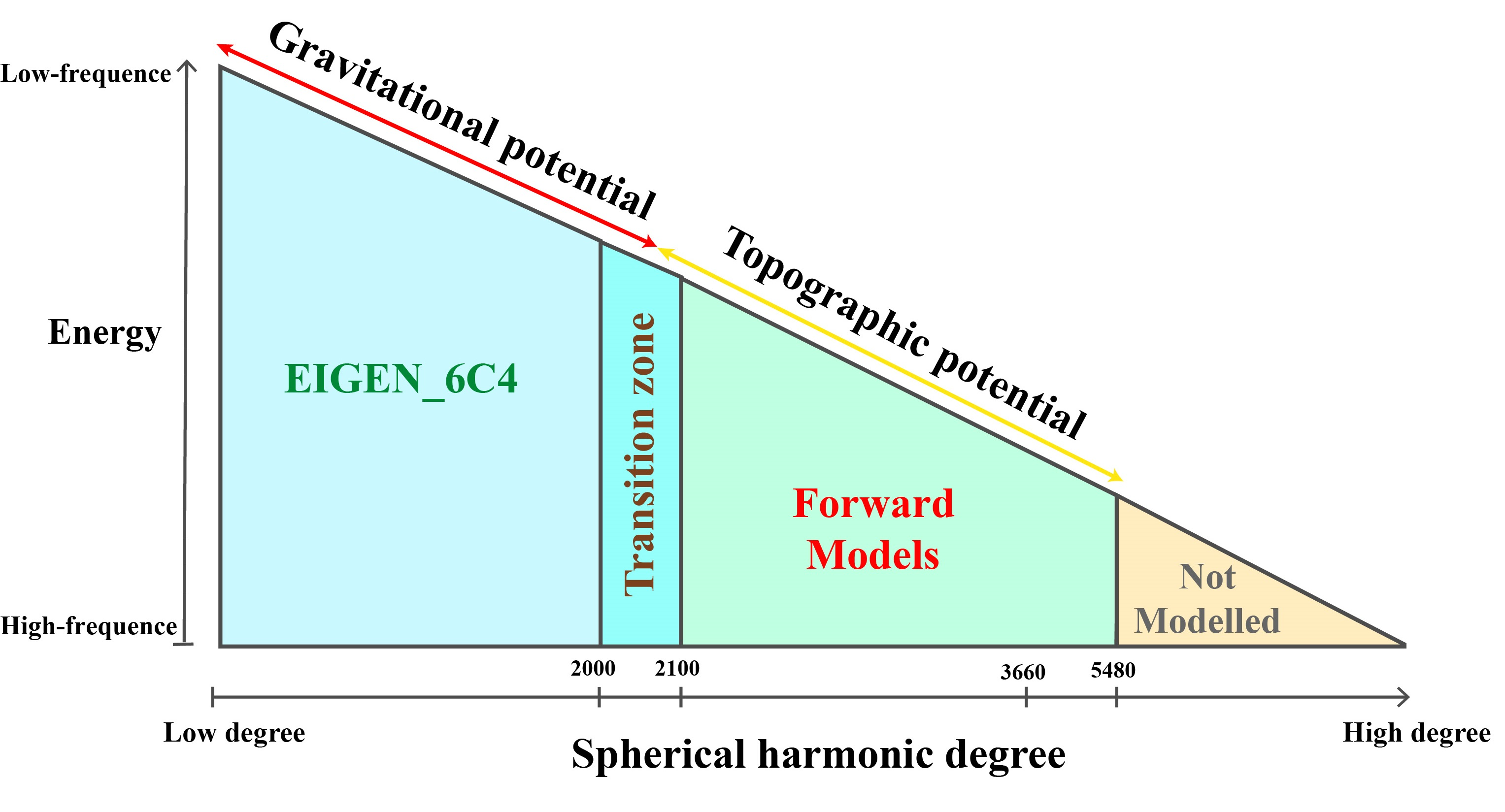
3.2. Construction of the Augmented GFMs
3.3. Accuracy Validation of the Augmented GFMs
3.3.1. Accuracy Validation by GNSS/Levelling Data
3.3.2. Accuracy Validation by Deflection of the Vertical (DOV) Data
3.3.3. Accuracy Validation by Gravity Data
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sánchez, L.; Ågren, J.; Huang, J.; Wang, Y.M.; Mäkinen, J.; Pail, R.; Barzaghi, R.; Vergos, G.S.; Ahlgren, K.; Liu, Q. Strategy for the realisation of the International Height Reference System (IHRS). J. Geod. 2021, 95, 33. [Google Scholar] [CrossRef]
- Sánchez, L.; Sideris, M.G. Vertical datum unification for the International Height Reference System (IHRS). Geophys. J. Int. 2017, 209, 570–586. [Google Scholar] [CrossRef]
- Zhang, P.; Li, Z.; Bao, L.; Zhang, P.; Wang, Y.; Wu, L.; Wang, Y. The Refined Gravity Field Models for Height System Unification in China. Remote Sens. 2022, 14, 1437. [Google Scholar] [CrossRef]
- Sánchez, L.; Ågren, J.; Huang, J.; Wang, Y.M.; Mäkinen, J.; Denker, H.; Ihde, J.; Abd-Elmotaal, H.; Ahlgren, K.; Amos, M.; et al. Advances in the realisation of the International Height Reference System. In Proceedings of the IUGG General Assembly, Rio de Janeiro, Brazil, 12–14 November 2019. [Google Scholar]
- Liu, H.; Wu, L.; Bao, L.; Li, Q.; Zhang, P.; Xi, M.; Wang, Y. Comprehensive Features Matching Algorithm for Gravity Aided Navigation. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Zhang, P.; Wu, L.; Bao, L.; Wang, B.; Liu, H.; Li, Q.; Wang, Y. Gravity disturbance compensation for dual-axis rotary modulation inertial navigation system. Front. Mar. Sci. 2023, 10, 1086225. [Google Scholar] [CrossRef]
- Zhang, P.; Bao, L.; Guo, D.; Wu, L.; Li, Q.; Liu, H.; Xue, Z.; Li, Z. Estimation of Vertical Datum Parameters Using the GBVP Approach Based on the Combined Global Geopotential Models. Remote Sens. 2020, 12, 4137. [Google Scholar] [CrossRef]
- Zhang, P.; Bao, L.; Guo, D.; Li, Q. Estimation of the height datum geopotential value of Hong Kong using the combined global geopotential models and GNSS/levelling data. Surv. Rev. 2021, 54, 106–116. [Google Scholar] [CrossRef]
- Tapley, B.D.; Bettadpur, S.; Watkins, M.; Reigber, C. The gravity recovery and climate experiment: Mission overview and early results. Geophy. Res. Lett. 2004, 31, L09607. [Google Scholar] [CrossRef]
- Drinkwater, M.R.; Floberghagen, R.; Haagmans, R.; Muzi, D.; Popescu, A. GOCE: ESA’s first earth explorer core mission. In Earth Gravity Field from Space—From Sensors to Earth Science; Beutler, G., Ed.; Kluwer Academic Publishers: Bern, Switzerland, 2003; Volume 108, pp. 419–432. [Google Scholar]
- Grombein, T.; Seitz, K.; Heck, B. On High-Frequency Topography-Implied Gravity Signals for a Height System Unification Using GOCE-based Global Geopotential Models. Surv. Geophys. 2016, 38, 443–477. [Google Scholar]
- Gruber, T.; Visser, P.N.A.M.; Ackermann, C.; Hosse, M. Validation of GOCE gravity field models by means of orbit residuals and geoid comparisons. J. Geod. 2011, 85, 845–860. [Google Scholar] [CrossRef]
- Hirt, C.; Gruber, T.; Featherstone, W.E. Evaluation of the first GOCE static gravity field models using terrestrial gravity, vertical defiections and EGM2008 quasigeoid heights. J. Geod. 2011, 85, 723–740. [Google Scholar] [CrossRef]
- Tziavos, I.N.; Vergos, G.S.; Grigoriadis, V.N.; Tzanou, E.A.; Natsiopoulos, D.A. Validation of GOCE/GRACE Satellite Only and Combined Global Geopotential Models Over Greece in the Frame of the GOCESeaComb Project. In IAG 150 Years; Rizos, C., Willis, P., Eds.; Springer International Publishing: Cham, Switzerland, 2015; Volume 143, pp. 297–304. [Google Scholar]
- Hirt, C.; Rexer, M.; Scheinert, M.; Pail, R.; Claessens, S.; Holmes, S. A new degree-2190 (10 km resolution) gravity field model for Antarctica developed from GRACE, GOCE and Bedmap2 data. J. Geod. 2016, 90, 105–127. [Google Scholar] [CrossRef]
- Sandwell, D.T.; Mueller, R.D.; Smith, W.H.F.; Emmanuel, G.; Richard, F. Marine geophysics. New global marine gravity model from CryoSat-2 and Jason-1 reveals buried tectonic structure. Science 2014, 346, 65–67. [Google Scholar] [CrossRef] [PubMed]
- Sandwell, D.T.; Harper, H.; Tozer, B.; Smith, W. Gravity Field Recovery from Geodetic Altimeter Missions. Adv. Space Res. 2019, 68, 1059–1072. [Google Scholar] [CrossRef]
- Andersen, O.B.; Knudsen, P.; Berry, P.A.M. The DNSC08GRA global marine gravity field from double retracked satellite altimetry. J. Geod. 2010, 84, 191–199. [Google Scholar]
- Pavlis, N.K.; Holmes, S.A.; Kenyon, S.C.; Factor, J.K. The development and evaluation of the earth gravitational model 2008(EGM2008). J. Geophys. Res. 2012, 117, B04406. [Google Scholar] [CrossRef]
- Förste, C.; Bruinsma, S.L.; Abrykosov, O.; Lemoine, J.-M.; Marty, J.C.; Flechtner, F.; Balmino, G.; Barthelmes, F.; Biancale, R. EIGEN-6C4 the Latest Combined Global Gravity Field Model Including GOCE Data up to Degree and Order 2190 of GFZ Potsdam and GRGS Toulouse; GFZ Data Services: Potsdam, Germany, 2014. [Google Scholar]
- Gilardoni, M.; Reguzzoni, M.; Sampietro, D. GECO: A global gravity model by locally combining GOCE data and EGM2008. Stud. Geophys. Geod. 2016, 60, 228–247. [Google Scholar] [CrossRef]
- Liang, W.; Xu, X.; Li, J.; Zhu, G. The determination of an ultrahigh gravity field model SGG-UGM-1 by combining EGM2008 gravity anomaly and GOCE observation data. Acta Geod. Cartogr. Sin. 2018, 47, 425–434. [Google Scholar]
- Liang, W.; Li, J.; Xu, X.; Zhang, S.; Zhao, Y. A High-Resolution Earth’s Gravity Field Model SGG-UGM-2 from GOCE, GRACE, Satellite Altimetry, and EGM2008. Engineering 2020, 6, 860–878. [Google Scholar]
- Zingerle, P.; Pail, R.; Gruber, T.; Oikonomidou, X. The combined global gravity field model XGM2019e. J. Geod. 2020, 94, 66. [Google Scholar] [CrossRef]
- Kaula, W.M. Theory of Satellite Geodesy; Blaisdell: Toronto, OH, USA, 1966. [Google Scholar]
- Forsberg, R. Modelling of the fine-structure of the geoid: Methods, data requirements and some results. Surv. Geophys. 1993, 14, 403–418. [Google Scholar]
- Denker, H. Regional Gravity Field Modeling: Theory and Practical Results. In Sciences of Geodesy—II Innovations and Future Developments; Xu, G., Ed.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 185–291. [Google Scholar]
- Tscherning, C.C.; Rapp, R.H. Closed Covariance Expressions for Gravity Anomalies, Geoid Undulations, and Deflections of the Vertical Implied by Anomaly Degree Variance Models; Reports of the Department of Geodetic Science; The Ohio State University: Columbus, OH, USA, 1974. [Google Scholar]
- Hirt, C.; Claessens, S.; Fecher, T.; Kuhn, M.; Pail, R.; Rexer, M. New ultrahigh-resolution picture of earth’s gravity field. Geophy. Res. Lett. 2013, 40, 4279–4283. [Google Scholar] [CrossRef]
- Yang, M.; Hirt, C.; Rexer, M.; Pail, P.; Yamazaki, D. The tree canopy effect in gravity forward modelling. Geophys. J. Int. 2019, 219, 271–289. [Google Scholar] [CrossRef]
- Hirt, C.; Kuhn, M.; Claessens, S.; Pail, R.; Gruber, T. Study of the Earth short-scale gravity field using the ERTM2160 gravity model. Comput. Geosci. 2014, 73, 71–80. [Google Scholar] [CrossRef]
- Hirt, C.; Yang, M.; Kuhn, M.; Bucha, B.; Kurzmann, A.; Pail, R. SRTM2gravity: An ultrahigh resolution global model of gravimetric terrain corrections. Geophys. Res. Lett. 2019, 46, 4618–4627. [Google Scholar] [CrossRef]
- Rexer, M.; Hirt, C. Ultra-high degree surface spherical harmonic analysis using the Gauss-Legendre and the Driscoll/Healy quadrature theorem and application to planetary topography models of Earth, Moon and Mars. Surv. Geophys. 2015, 36, 803–830. [Google Scholar] [CrossRef]
- Tozer, B.; Sandwell, D.T.; Smith, W.H.F.; Olson, C.; Beale, J.R.; Wessel, P. Global Bathymetry and Topography at 15 Arc Sec: SRTM15+. Earth Space Sci. 2019, 6, 1847–1864. [Google Scholar] [CrossRef]
- Rexer, M.; Hirt, C.; Pail, R. High-Resolution Global Forward Modelling—A Degree-5480 Global Ellipsoidal Topographic Potential Model; EGU General Assembly, European Geosciences: Vienna, Austria, 2017. [Google Scholar]
- Abrykosov, O.; Ince, E.S.; Foerste, C.; Flechtner, F. Rock-Ocean-Lake-Ice Topographic Gravity Field Model (ROLI Model) Expanded up to Degree 3660; GFZ Data Services: Potsdam, Germany, 2019. [Google Scholar]
- Ince, E.S.; Abrykosov, O.; Förste, C.; Frank, F. Forward Gravity Modelling to Augment High-Resolution Combined Gravity Field Models. Surv. Geophys. 2020, 41, 767–804. [Google Scholar] [CrossRef]
- Ince, E.S.; Förste, C.; Abrykosov, O.; Flechtner, F. Topographic Gravity Field Modelling for Improving High-Resolution Global Gravity Field Models. In International Association of Geodesy Symposia; Freymueller, J.T., Sánchez, L., Eds.; Springer International Publishing: Cham, Switzerland; Berlin/Heidelberg, Germany, 2022; Volume 154, pp. 1–10. [Google Scholar]
- Huang, J.; Véronneau, M.; Crowley, J.W.; D’Aoust, B.; Pavlic, G. Can an Earth Gravitational Model Augmented by a Topographic Gravity Field Model Realize the International Height Reference System Accurately? In International Association of Geodesy Symposia; Freymueller, J.T., Sánchez, L., Eds.; Springer International Publishing: Cham, Switzerland; Berlin/Heidelberg, Germany, 2022; Volume 154, pp. 1–7. [Google Scholar]
- Hirt, C.; Rexer, M. Earth2014: 1 arc-min shape, topography, bedrock and ice-sheet models—Available as gridded data and degree-10,800 spherical harmonics. Int. J. Appl. Earth Obs. Geoinf. 2015, 39, 103–112. [Google Scholar]
- Wang, W.; Guo, C.; Li, D.; Zhao, H. Elevation change analysis of the national first order leveling points in recent 20 years. Acta Geod. Cartogr. Sin. 2019, 48, 1–8. [Google Scholar]
- Altamimi, Z.; Rebischung, P.; Métivier, L.; Collilieux, X. ITRF2014: A new release of the International Terrestrial Reference Frame modeling nonlinear station motions. J. Geophys. Res. Solid Earth 2016, 121, 6109–6131. [Google Scholar] [CrossRef]
- van Westrum, D.; Ahlgren, K.; Hirt, C.; Guillaume, S. A Geoid Slope Validation Survey (2017) in the rugged terrain of Colorado, USA. J. Geod. 2021, 95, 9. [Google Scholar] [CrossRef]
- Hofmann-Wellenhof, B.; Moritz, H. Physical Geodesy; Springer: Wien, WI, USA, 2006. [Google Scholar]
- Blackman, R.B.; Tukey, J.W. The measurement of power spectra from the point of view of communications engineering—Part I. Bell Syst. Tech. J. 1958, 37, 185–282. [Google Scholar]
- He, L.; Li, J.; Chu, Y. Evaluation of the Geopotential Value for the Local Vertical Datum of China Using GRACE/GOCE GGMs and GPS/Leveling Data. Acta Geod. Cartogr. Sin. 2017, 46, 9. [Google Scholar]
- Moritz, H. Geodetic reference system 1980. J. Geod. 2000, 74, 128–133. [Google Scholar]
- Bucha, B.; Janák, J. A MATLAB-based graphical user interface program for computing functionals of the geopotential up to ultra-high degrees and orders. Comput. Geosci. 2013, 56, 186–196. [Google Scholar] [CrossRef]
- Ustun, A.; Abbak, R. On global and regional spectral evaluation of global geopotential models. J. Geophys. Eng. 2010, 7, 369. [Google Scholar] [CrossRef]
- Kelly, C.I.; Andam-Akorful, S.A.; Hancock, C.; Laari, P.; Ayer, J. Global gravity models and the Ghanaian Vertical Datum: Challenges of a proper definition. Surv. Rev. 2019, 53, 44–54. [Google Scholar]
- Ince, E.S.; Barthelmes, F.; Reissland, S.; Elger, K.; Förste, C.; Flechtner, F.; Schuh, H. ICGEM—15 years of successful collection and distribution of global gravitational models, associated services, and future plans. Earth Syst. Sci. Data 2019, 11, 647–674. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Models | Data | GM/(m3s−2) | a/m |
|---|---|---|---|
| EIGEN_6C4 | EGM2008, GOCE, GRACE, altimetry | 0.3986004415 × 1015 | 0.6378136460 × 107 |
| ROLI_EllApprox_SphN_3660 | Earth2014 [40] | 0.3986004415 × 1015 | 0.6378136300 × 107 |
| dV_ELL_Earth2014_5480 | Earth2014 [40] | 0.3986005000 × 1015 | 0.6378137000 × 107 |
| Function | Factor | Unit |
|---|---|---|
| geoid | R | m |
| Gravity anomaly | mGal | |
| Gravity disturbance | mGal | |
| DOV | arcsec |
| Models | Max | Min | Mean | STD |
|---|---|---|---|---|
| EIGEN_6C4 | 1.284 | −1.274 | −0.098 | 0.267 |
| EIGEN_3660 | 1.285 | −1.283 | −0.088 | 0.261 |
| EIGEN_5480 | 1.362 | −1.286 | −0.077 | 0.258 |
| Component of DOV | Models | Max | Min | Mean | RMS |
|---|---|---|---|---|---|
| The meridian component | EIGEN_6C4 | 17.371 | −17.9465 | −0.207 | 2.770 |
| EIGEN_3660 | 16.009 | −21.213 | −0.189 | 2.234 | |
| EIGEN_5480 | 14.418 | −14.671 | −0.155 | 2.186 | |
| The prime vertical component | EIGEN_6C4 | 14.9158 | −14.5742 | 0.188 | 2.823 |
| EIGEN_3660 | 19.6499 | −14.4563 | 0.115 | 2.386 | |
| EIGEN_5480 | 14.9582 | −11.1469 | 0.121 | 2.171 |
| Component of DOV | Models | Max | Min | Mean | RMS |
|---|---|---|---|---|---|
| The meridian component | EIGEN_6C4 | 3.978 | −4.680 | 0.331 | 1.31 |
| EIGEN_3660 | 4.222 | −3.740 | 0.267 | 1.06 | |
| EIGEN_5480 | 2.213 | −3.951 | 0.076 | 0.94 | |
| The prime vertical component | EIGEN_6C4 | 5.532 | −7.851 | −0.124 | 1.62 |
| EIGEN_3660 | 3.525 | −3.956 | −0.057 | 1.18 | |
| EIGEN_5480 | 4.944 | −2.150 | −0.0429 | 1.05 |
| Models | Max | Min | Mean | RMS |
|---|---|---|---|---|
| EIGEN_6C4 | 72.40 | −195.50 | −0.45 | 4.79 |
| EIGEN_3660 | 72.19 | −192.95 | −0.25 | 4.31 |
| EIGEN_5480 | 87.30 | −194.40 | −0.19 | 4.00 |
| Models | Max | Min | Mean | RMS |
|---|---|---|---|---|
| EIGEN_6C4 | 155.37 | −179.61 | −0.67 | 10.49 |
| EIGEN_3660 | 148.72 | −157.28 | −0.53 | 9.73 |
| EIGEN_5480 | 128.16 | −160.59 | −0.15 | 9.30 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, P.; Bao, L.; Ma, Y.; Liu, X. Augmented Gravity Field Modelling by Combining EIGEN_6C4 and Topographic Potential Models. Remote Sens. 2023, 15, 3418. https://doi.org/10.3390/rs15133418
Zhang P, Bao L, Ma Y, Liu X. Augmented Gravity Field Modelling by Combining EIGEN_6C4 and Topographic Potential Models. Remote Sensing. 2023; 15(13):3418. https://doi.org/10.3390/rs15133418
Chicago/Turabian StyleZhang, Panpan, Lifeng Bao, Yange Ma, and Xinyu Liu. 2023. "Augmented Gravity Field Modelling by Combining EIGEN_6C4 and Topographic Potential Models" Remote Sensing 15, no. 13: 3418. https://doi.org/10.3390/rs15133418
APA StyleZhang, P., Bao, L., Ma, Y., & Liu, X. (2023). Augmented Gravity Field Modelling by Combining EIGEN_6C4 and Topographic Potential Models. Remote Sensing, 15(13), 3418. https://doi.org/10.3390/rs15133418