

An Overview of the PAKF-JPDA Approach for Elliptical Multiple Extended Target Tracking Using High-Resolution Marine Radar Data

Abstract
1. Introduction
- A multisensor radar-based detection and tracking framework for our MTSAM system;
- A working application and evaluation of the elliptical METT algorithm, PAKF-JPDA customized for processing high-resolution radar video streams from multiple ground stations.
2. Problem Description
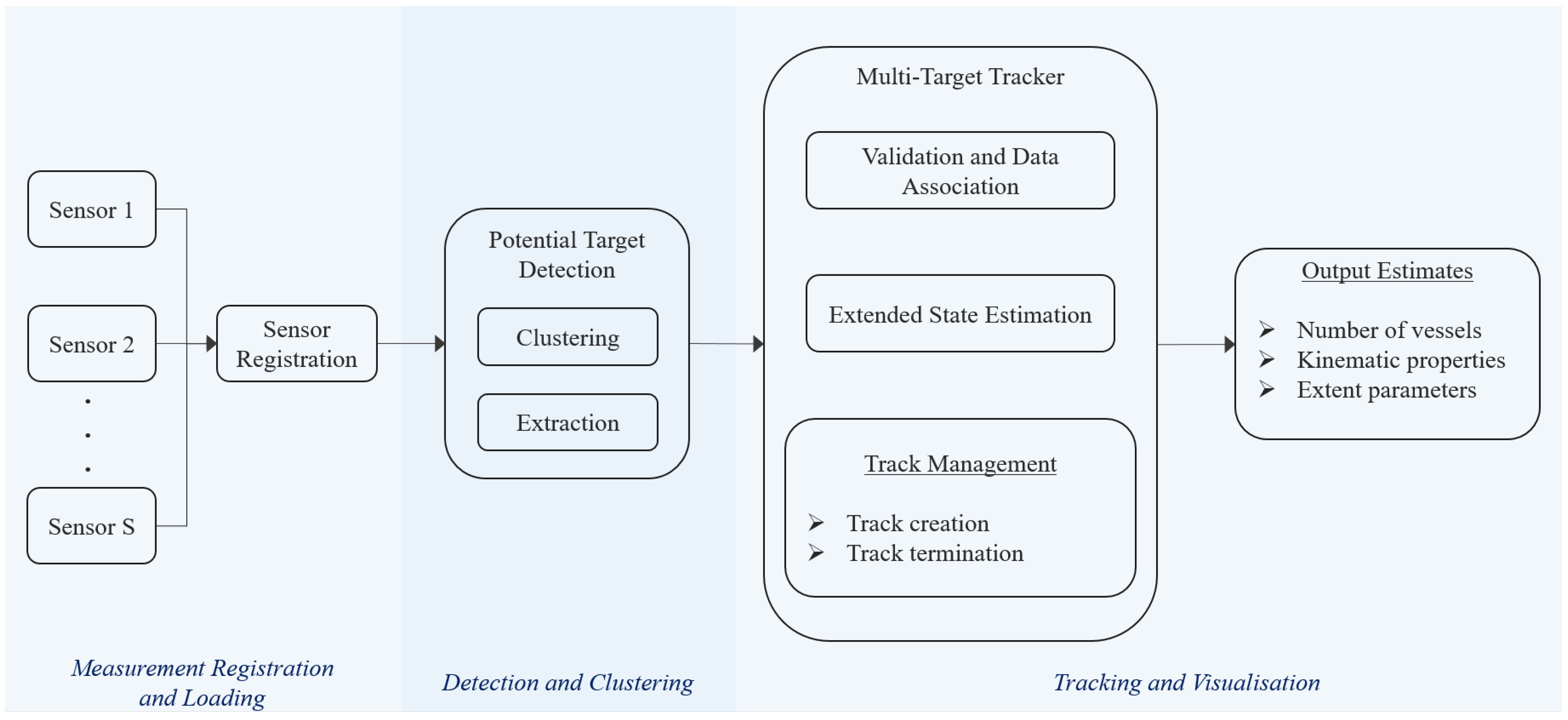
3. Processing Chain
3.1. Measurement Registration and Loading
3.2. Detection and Clustering
3.3. Tracking and Visualization
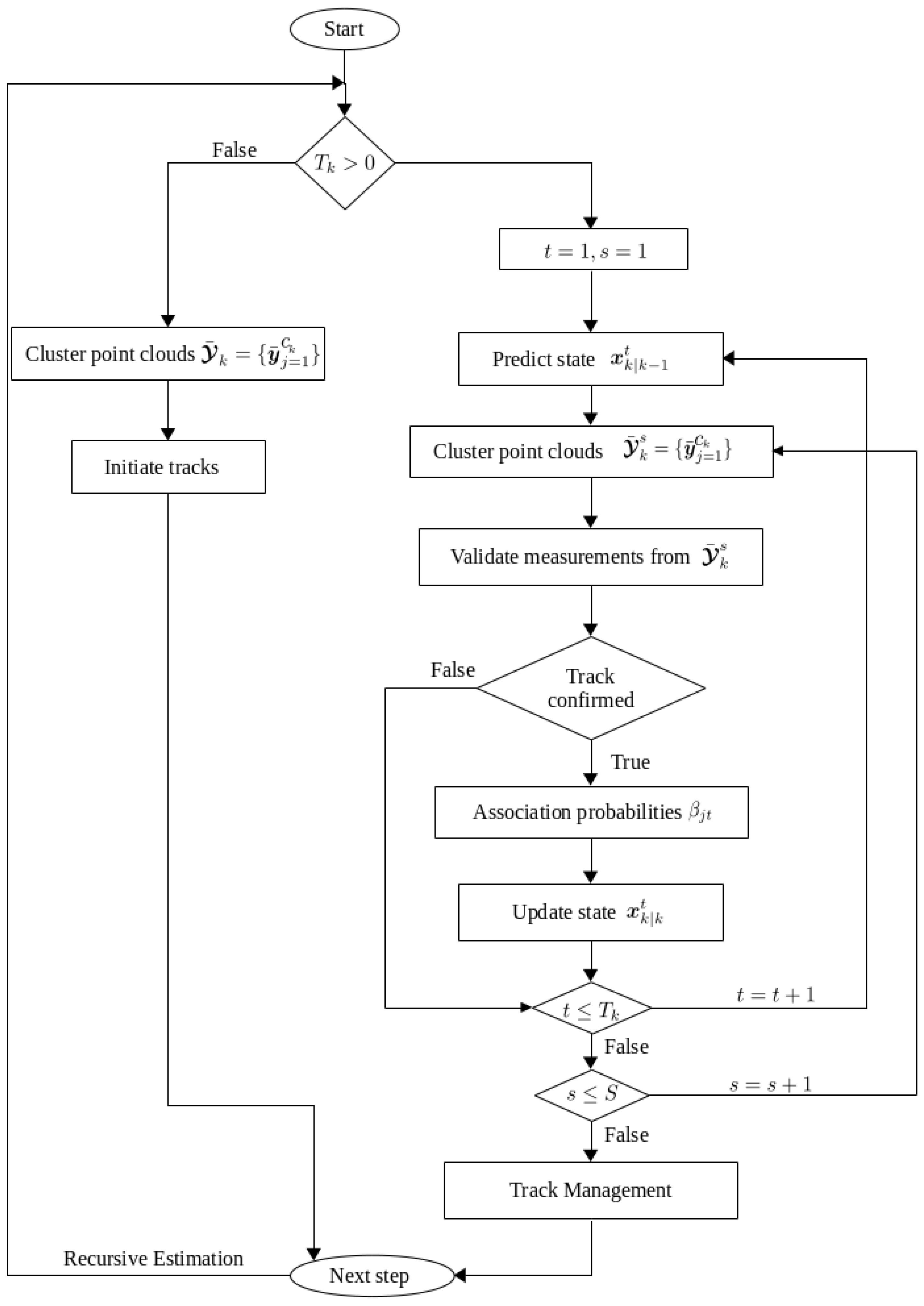
4. The PAKF-JPDA Filter for METT
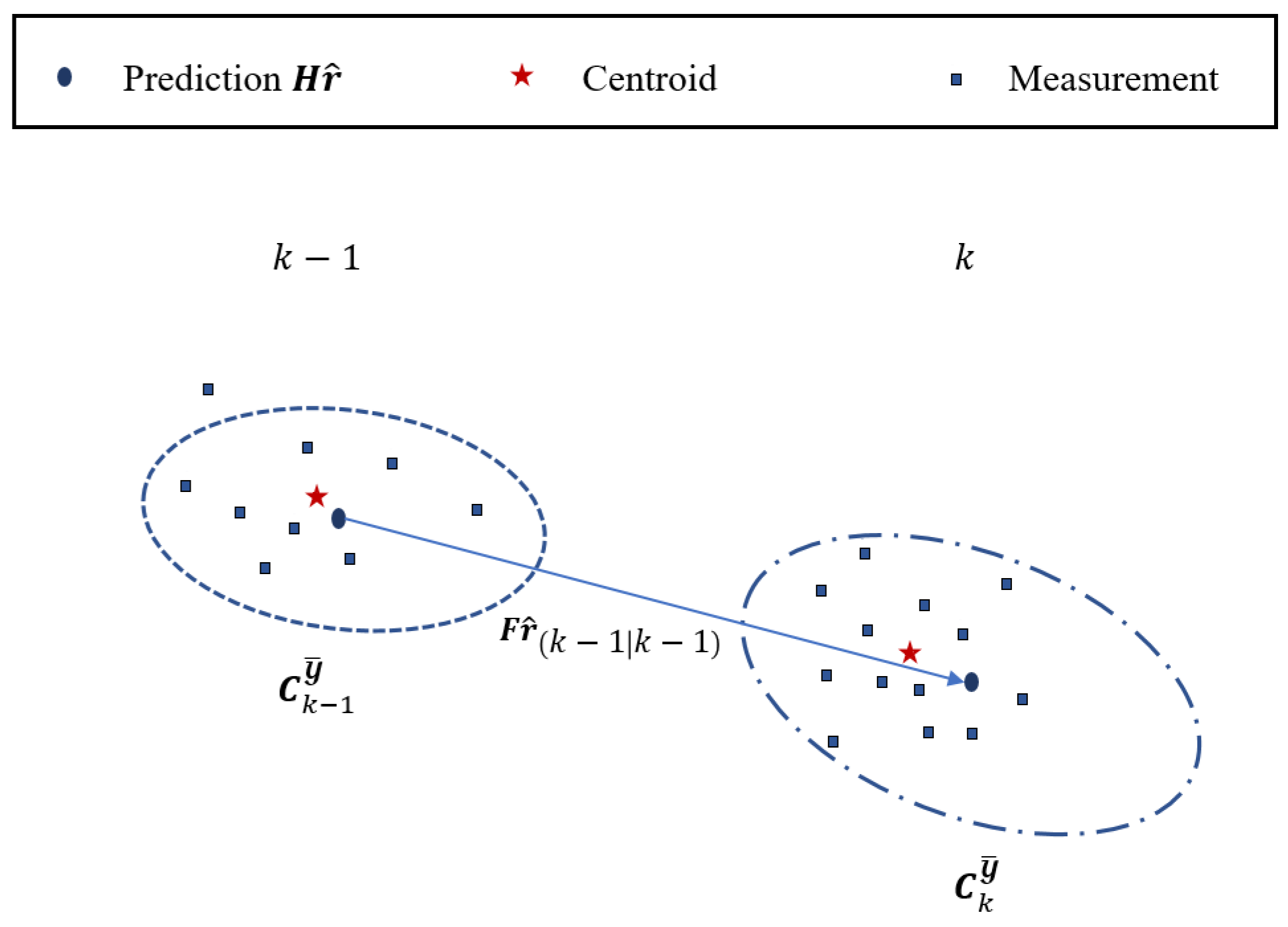
4.1. Motion Model
- transition matrices with observation interval T and , denoting the identity matrix of dimension 3;
- are the vector-respective additive zero-mean Gaussian noises with covariances .
4.2. Measurement Model
4.3. Validation
4.4. Association Probabilities
4.5. PAKF for Extent Estimation
4.6. Track Management and Fusion
5. Application and Results
5.1. Real-World Radar Streaming
5.2. Clustering
5.3. Multisensor METT Visualization
- # is the step at which the target was initialized.
- Orientation values from for two possibilities: when vessel navigates from west to east, its heading is taken as , and in the opposite case, the heading is taken as .
- represent the length and width, respectively.
6. Discussion
6.1. Performance of Current Framework
6.2. Advancing the Framework
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- European Maritime Safety Agency (EMSA). Analysis of Marine Casualties and Incidents Involving Container Vessels. In Safety Analysis of EMCIP Data—Container Vessels; European Maritime Safety Agency (EMSA): Lisbon, Portugal, 2020; pp. 8–9. [Google Scholar]
- Felski, A.; Zwolak, K. The Ocean-Going Autonomous Ship—Challenges and Threats. J. Mar. Sci. Eng. 2020, 8, 41. [Google Scholar] [CrossRef]
- Singh, S.; Fowdur, J.S.; Gawlikowski, J.; Medina, D. Leveraging Graph and Deep Learning Uncertainties to Detect Anomalous Maritime Trajectories. IEEE Trans. Intell. Transp. Syst. 2022, 23, 23488–23502. [Google Scholar] [CrossRef]
- Vo, B.N.; Mallick, M.; Bar-Shalom, Y.; Coraluppi, S.; Osborne, R.; Mahler, R. Multitarget Tracking. In Wiley Encyclopedia of Electrical and Electronics Engineering; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2015; pp. 1–25. [Google Scholar] [CrossRef]
- Granström, K.; Baum, M. A Tutorial on Multiple Extended Object Tracking. TechRxiv 2022. [Google Scholar] [CrossRef]
- Feldmann, M.; Franken, D.; Koch, W. Tracking of Extended Objects and Group Targets Using Random Matrices. IEEE Trans. Signal Process. 2011, 59, 1409–1420. [Google Scholar] [CrossRef]
- Yang, S.; Baum, M. Tracking the Orientation and Axes Lengths of an Elliptical Extended Object. IEEE Trans. Signal Process. 2019, 67, 4720–4729. [Google Scholar] [CrossRef]
- Kaulbersch, H.; Baum, M.; Willett, P. An EM approach for Contour Tracking based on Point Clouds. In Proceedings of the 2016 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), Baden, Germany, 19–21 September 2016; pp. 529–533. [Google Scholar] [CrossRef]
- Petrov, N.; Gning, A.; Mihaylova, L.; Angelova, D. Box Particle Filtering for Extended Object Tracking. In Proceedings of the 15th International Conference on Information Fusion, Singapore, 9–12 July 2012; pp. 82–89. [Google Scholar]
- Granström, K.; Lundquist, C.; Orguner, U. Tracking Rectangular and Elliptical Extended Targets using Laser Measurements. In Proceedings of the 14th International Conference on Information Fusion, Chicago, IL, USA, 5–8 July 2011; pp. 1–8. [Google Scholar]
- Baum, M.; Hanebeck, U.D. Extended Object Tracking with Random Hypersurface Models. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 149–159. [Google Scholar] [CrossRef]
- Kaulbersch, H.; Honer, J.; Baum, M. A Cartesian B-Spline Vehicle Model for Extended Object Tracking. In Proceedings of the 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Yao, G.; Wang, P.; Berntorp, K.; Mansour, H.; Boufounos, P.; Orlik, P.V. Extended Object Tracking with Automotive Radar Using B-Spline Chained Ellipses Model. In Proceedings of the ICASSP 2021—2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Toronto, ON, Canada, 6–11 June 2021; pp. 8408–8412. [Google Scholar] [CrossRef]
- Granström, K.; Baum, M.; Reuter, S. Extended Object Tracking: Introduction, Overview, and Applications. J. Adv. Inf. Fusion 2017, 12, 139–174. [Google Scholar]
- Mihaylova, L.; Carmi, A.; Septier, F.; Gning, A.; Pang, S.; Godsill, S. Overview of Bayesian Sequential Monte Carlo Methods for Group and Extended Object Tracking. Digit. Signal Process. 2014, 25, 1–16. [Google Scholar] [CrossRef]
- Fowdur, J.S.; Baum, M.; Heymann, F. An Elliptical Principal Axes-based Model for Extended Target Tracking with Marine Radar Data. In Proceedings of the 24th International Conference on Information Fusion (FUSION 2021), Sun City, South Africa, 1–4 November 2021. [Google Scholar] [CrossRef]
- Vivone, G.; Braca, P.; Granström, K.; Natale, A.; Chanussot, J. Converted Measurements Random Matrix Approach to Extended Target Tracking Using X-band Marine Radar Data. In Proceedings of the 2015 18th International Conference on Information Fusion (Fusion), Washington, DC, USA, 6–9 July 2015; pp. 976–983. [Google Scholar]
- Brekke, E.; Eidsvik, J. LIDAR Extended Object Tracking of a Maritime Vessel Using an Ellipsoidal Contour Model. In Proceedings of the Symposium Data Fusion, Bonn, Germany, 9–11 October 2018. [Google Scholar]
- Han, J.; Kim, S.Y.; Kim, J. Enhanced Target Ship Tracking with Geometric Parameter Estimation for Unmanned Surface Vehicles. IEEE Access 2021, 9, 39864–39872. [Google Scholar] [CrossRef]
- Koch, J.W. Bayesian Approach to Extended Object and Cluster Tracking using Random Matrices. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 1042–1059. [Google Scholar] [CrossRef]
- Lan, J.; Li, X.R. Tracking of Extended Object or Target Group Using Random Matrix: New Model and Approach. IEEE Trans. Aerosp. Electr. Syst. 2016, 52, 2973–2988. [Google Scholar] [CrossRef]
- Lan, J.; Li, X.R. Extended-Object or Group-Target Tracking Using Random Matrix with Nonlinear Measurements. IEEE Trans. Signal Process. 2019, 67, 5130–5142. [Google Scholar] [CrossRef]
- Thormann, K.; Baum, M. Incorporating Range-Rate Measurements in EKF-based Elliptical Extended Object Tracking. In Proceedings of the IEEE International Conference on Multisensor Fusion and Integration (MFI), Karlsruhe, Germany, 23–25 September 2021; p. 1. [Google Scholar]
- Govaers, F. On Independent Axes Estimation for Extended Target Tracking. In Proceedings of the 2019 Sensor Data Fusion: Trends, Solutions, Applications (SDF), Bonn, Germany, 15–17 October 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Thormann, K.; Yang, S.; Baum, M. A Comparison of Kalman Filter-based Approaches for Elliptic Extended Object Tracking. In Proceedings of the IEEE 23rd International Conference on Information Fusion, FUSION 2020, Rustenburg, South Africa, 6–9 July 2020; pp. 1–8. [Google Scholar]
- Degerman, J.; Wintenby, J.; Svensson, D. Extended Target Tracking using Principal Components. In Proceedings of the 14th International Conference on Information Fusion, Chicago, IL, USA, 5–8 July 2011; pp. 1–8. [Google Scholar]
- Li, M.; Lan, J.; Li, X.R. Tracking of Elliptical Extended Object with Unknown but Fixed Lengths of Axes. In Proceedings of the 2020 IEEE 23rd International Conference on Information Fusion (FUSION), Rustenburg, South Africa, 6–9 July 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Tuncer, B.; Özkan, E. Random Matrix Based Extended Target Tracking with Orientation: A New Model and Inference. IEEE Trans. Signal Process. 2021, 69, 1910–1923. [Google Scholar] [CrossRef]
- Baum, M.; Faion, F.; Hanebeck, U.D. Modeling the Target Extent with Multiplicative Noise. In Proceedings of the 2012 15th International Conference on Information Fusion, Singapore, 9–12 July 2012; pp. 2406–2412. [Google Scholar]
- Fowdur, J.S.; Baum, M.; Heymann, F. Tracking Targets with Known Spatial Extent Using Experimental Marine Radar Data. In Proceedings of the 22nd International Conference on Information Fusion (FUSION 2019), Ottawa, ON, Canada, 2–5 July 2019. [Google Scholar]
- Fowdur, J.S.; Baum, M.; Heymann, F. A Marine Radar Dataset for Multiple Extended Target Tracking. In Proceedings of the 1st Maritime Situational Awareness Workshop (MSAW 2019), Lerici, Italy, 8–10 October 2019. [Google Scholar]
- Vivone, G.; Braca, P. Joint Probabilistic Data Association Tracker for Extended Target Tracking Applied to X-Band Marine Radar Data. IEEE J. Ocean. Eng. 2016, 41, 1007–1019. [Google Scholar] [CrossRef]
- Yang, S.; Thormann, K.; Baum, M. Linear-Time Joint Probabilistic Data Association for Multiple Extended Object Tracking. In Proceedings of the 2018 IEEE Sensor Array and Multichannel Signal Processing Workshop (SAM 2018), Sheffield, UK, 8–11 July 2018; pp. 6–10. [Google Scholar] [CrossRef]
- Yang, S.; Wolf, L.; Baum, M. Marginal Association Probabilities for Multiple Extended Objects without Enumeration of Measurement Partitions. In Proceedings of the 23rd International Conference on Information Fusion, Rustenburg, South Africa, 6–9 July 2020. [Google Scholar] [CrossRef]
- Schuster, M.; Reuter, J.; Wanielik, G. Probabilistic Data Association for Tracking Extended Targets under Clutter using Random Matrices. In Proceedings of the 2015 18th International Conference on Information Fusion (Fusion), Washington, DC, USA, 6–9 July 2015; pp. 961–968. [Google Scholar]
- Monika Wieneke, W.K. Probabilistic Tracking of Multiple Extended Targets using Random Matrices. In Proceedings of the SPIE Defense, Security, and Sensing, Orlando, FL, USA, 5–9 April 2010; Volume 7698. [Google Scholar] [CrossRef]
- Vivone, G.; Granström, K.; Braca, P.; Willett, P. Multiple Sensor Bayesian Extended Target Tracking Fusion Approaches Using Random Matrices. In Proceedings of the 2016 19th International Conference on Information Fusion (FUSION), Heidelberg, Germany, 5–8 July 2016; pp. 886–892. [Google Scholar]
- Vivone, G.; Granström, K.; Braca, P.; Willett, P. Multiple Sensor Measurement Updates for the Extended Target Tracking Random Matrix Model. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2544–2558. [Google Scholar] [CrossRef]
- Thormann, K.; Baum, M. Fusion of Elliptical Extended Object Estimates Parameterized with Orientation and Axes Lengths. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2369–2382. [Google Scholar] [CrossRef]
- Fowdur, J.S. Multiple Extended Target Tracking in Maritime Environment Using Marine Radar Data. Ph.D. Thesis, University of Göttingen, Göttingen, Germany, 2022. [Google Scholar] [CrossRef]
- Fowdur, J.S.; Baum, M.; Heymann, F. Real-World Marine Radar Datasets for Evaluating Target Tracking Methods. Sensors 2021, 21, 4641. [Google Scholar] [CrossRef] [PubMed]
- EUROCONTROL. ASTERIX Protocol. Available online: https://www.eurocontrol.int/asterix (accessed on 4 July 2022).
- Bock, H.H. Origins and Extensions of the k-means Algorithm in Cluster Analysis. J. Electron. D’Histoire Probab. Stat. Electron. Only 2008, 4, 1–18. [Google Scholar]
- Ester, M.; Kriegel, H.P.; Sander, J.; Xu, X. A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. In Proceedings of the Second International Conference on Knowledge Discovery and Data Mining, KDD’96, Portland, OR, USA,, 2–4 August 1996; AAAI Press: Palo Alto, CA, USA, 1996; pp. 226–231. [Google Scholar]
- Bar-Shalom, Y.; Kirubarajan, T.; Li, X.R. Estimation with Applications to Tracking and Navigation; John Wiley & Sons, Inc.: New York, NY, USA, 2002. [Google Scholar]
- Blackman, S.S. Multiple-Target Tracking with Radar Applications; Artech House Publishers: Boston, MA, USA, 1986. [Google Scholar]
- Bar-Shalom, Y.; Daum, F.; Huang, J. The Probabilistic Data Association Filter. IEEE Control Syst. Mag. 2009, 29, 82–100. [Google Scholar] [CrossRef]
- Singer, R.; Kanyuck, A. Computer Control of Multiple Site Track Correlation. Automatica 1971, 7, 455–463. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Updating Kinematic Parameters |
|---|
| Extent Measurements Extraction through EVD |
| Updating Extent Parameters |
| Parameter | Value | Description |
|---|---|---|
| 20 | value for DBSCAN in pixels | |
| 50 | Minimum number of pixel points for DBSCAN | |
| Kinematic state covariance at initiation step k, [m, m, km/h, km/h] | ||
| Extent state covariance at initiation step k, [, m, m] | ||
| Kinematic state process noise, [m, m, km/h, km/h] | ||
| Extent state process noise, [, m, m] | ||
| Measurement noise for Sensor 1 in meters | ||
| Measurement noise for Sensor 2 in meters | ||
| Measurement noise for Sensor 3 in meters | ||
| Measurement noise for extent parameters, [, m, m] | ||
| Gate threshold | ||
| Track confirmation condition | ||
| Track termination condition |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fowdur, J.S.; Baum, M.; Heymann, F.; Banys, P. An Overview of the PAKF-JPDA Approach for Elliptical Multiple Extended Target Tracking Using High-Resolution Marine Radar Data. Remote Sens. 2023, 15, 2503. https://doi.org/10.3390/rs15102503
Fowdur JS, Baum M, Heymann F, Banys P. An Overview of the PAKF-JPDA Approach for Elliptical Multiple Extended Target Tracking Using High-Resolution Marine Radar Data. Remote Sensing. 2023; 15(10):2503. https://doi.org/10.3390/rs15102503
Chicago/Turabian StyleFowdur, Jaya Shradha, Marcus Baum, Frank Heymann, and Pawel Banys. 2023. "An Overview of the PAKF-JPDA Approach for Elliptical Multiple Extended Target Tracking Using High-Resolution Marine Radar Data" Remote Sensing 15, no. 10: 2503. https://doi.org/10.3390/rs15102503
APA StyleFowdur, J. S., Baum, M., Heymann, F., & Banys, P. (2023). An Overview of the PAKF-JPDA Approach for Elliptical Multiple Extended Target Tracking Using High-Resolution Marine Radar Data. Remote Sensing, 15(10), 2503. https://doi.org/10.3390/rs15102503