
Analyzing the Error Pattern of InSAR-Based Mining Subsidence Estimation Caused by Neglecting Horizontal Movements



Abstract
:
1. Introduction
2. Methods
2.1. Overview of the NOV Method and Its Theoretical Errors
2.2. Pixel-Wise Method for Assessing the Errors of the NOV-Estimated Mining Subsidence
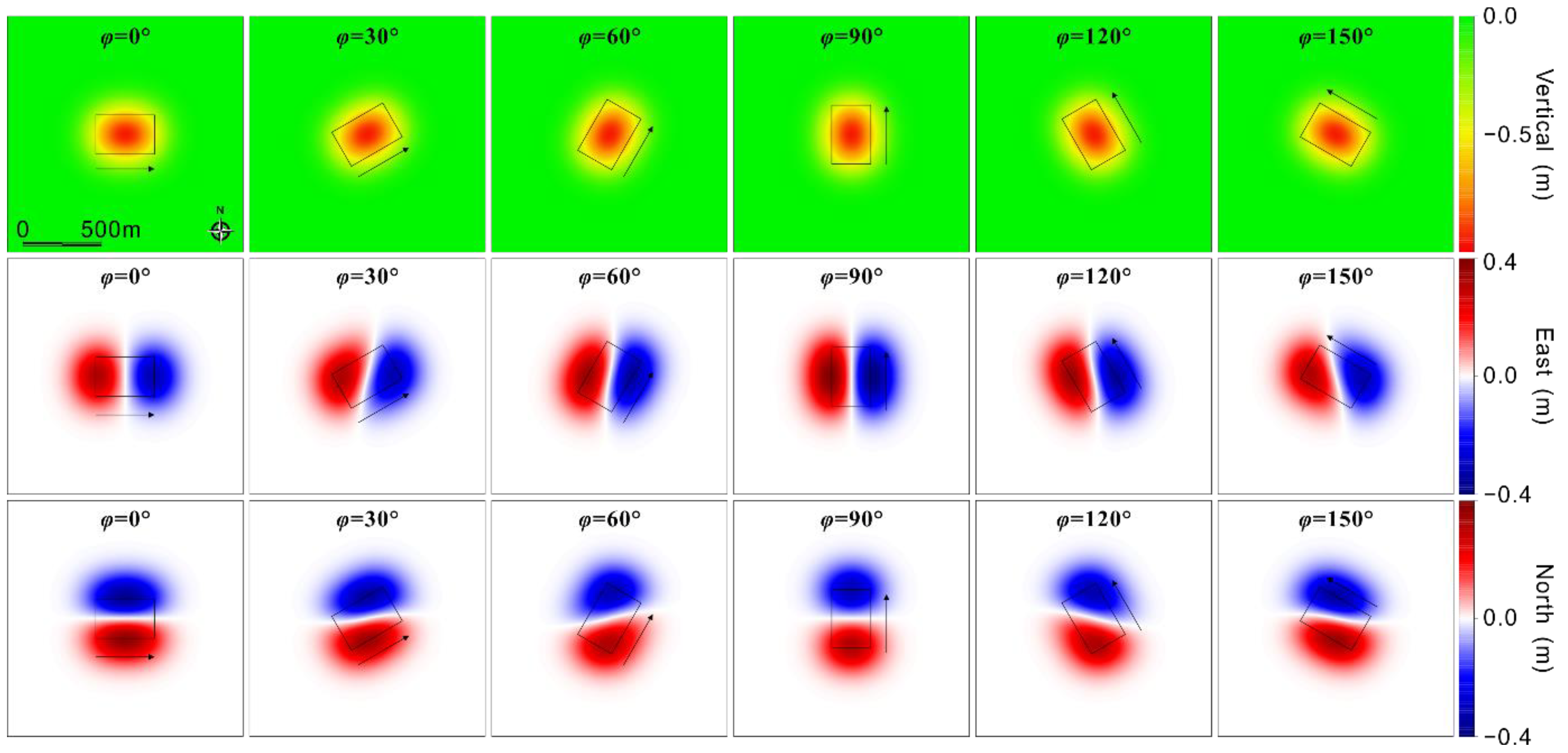
2.2.1. Generating a Reference Subsidence Assisted by a Prior Constraint
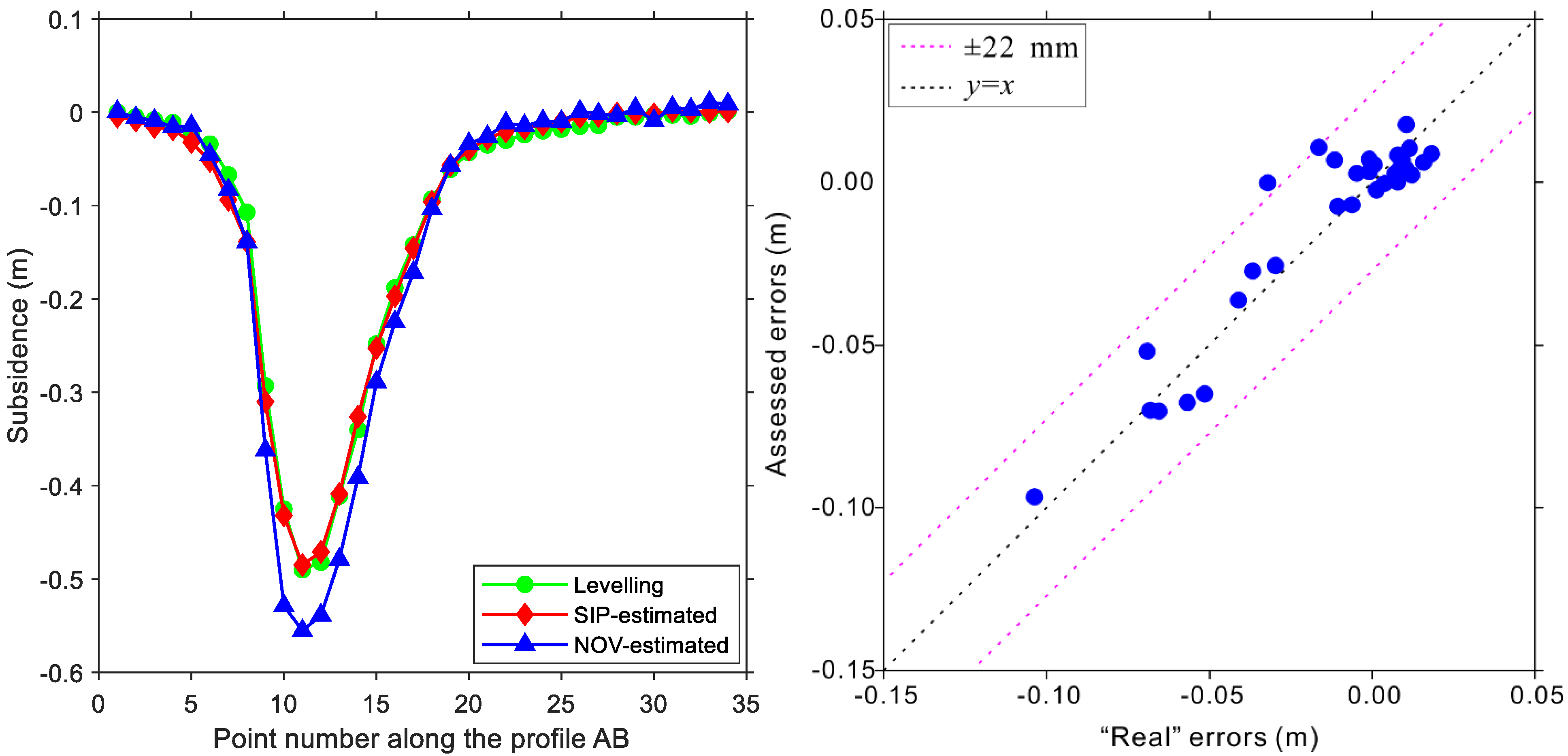
2.2.2. Assessing the Errors of NOV-Estimated Mining Subsidence
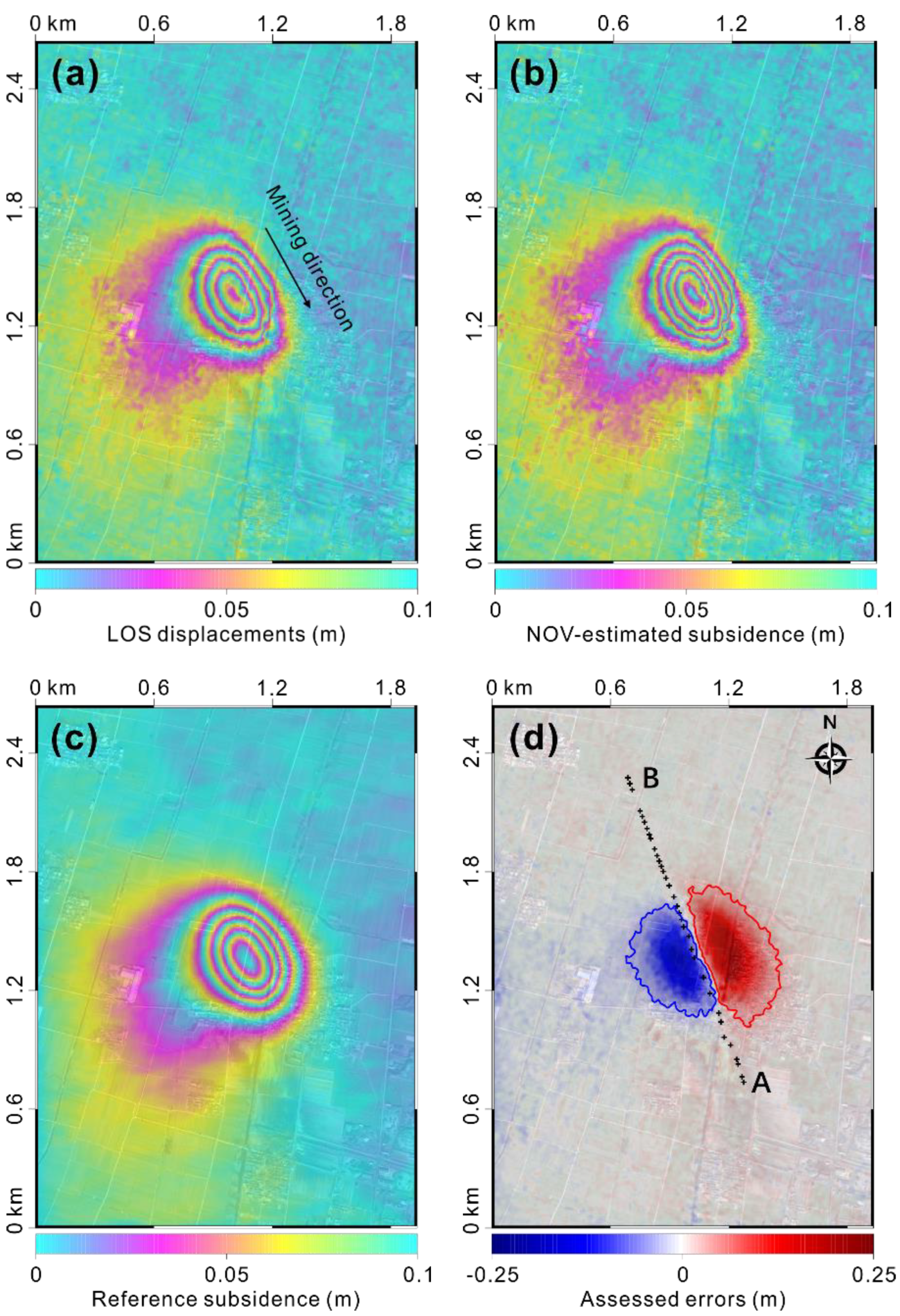
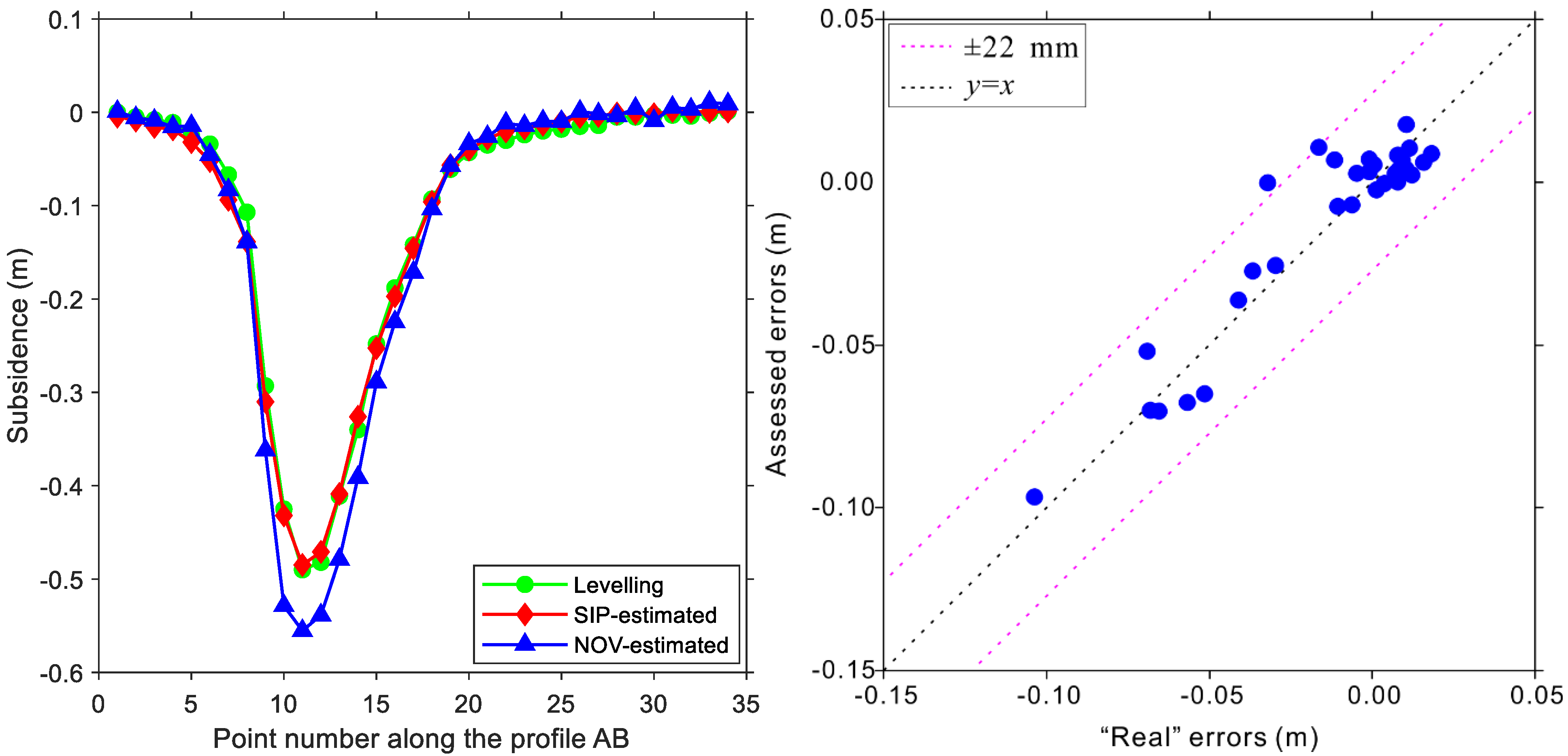
3. Results
4. Discussions
4.1. Error Pattern Analyses of the NOV-Estimated Mining Subsidence
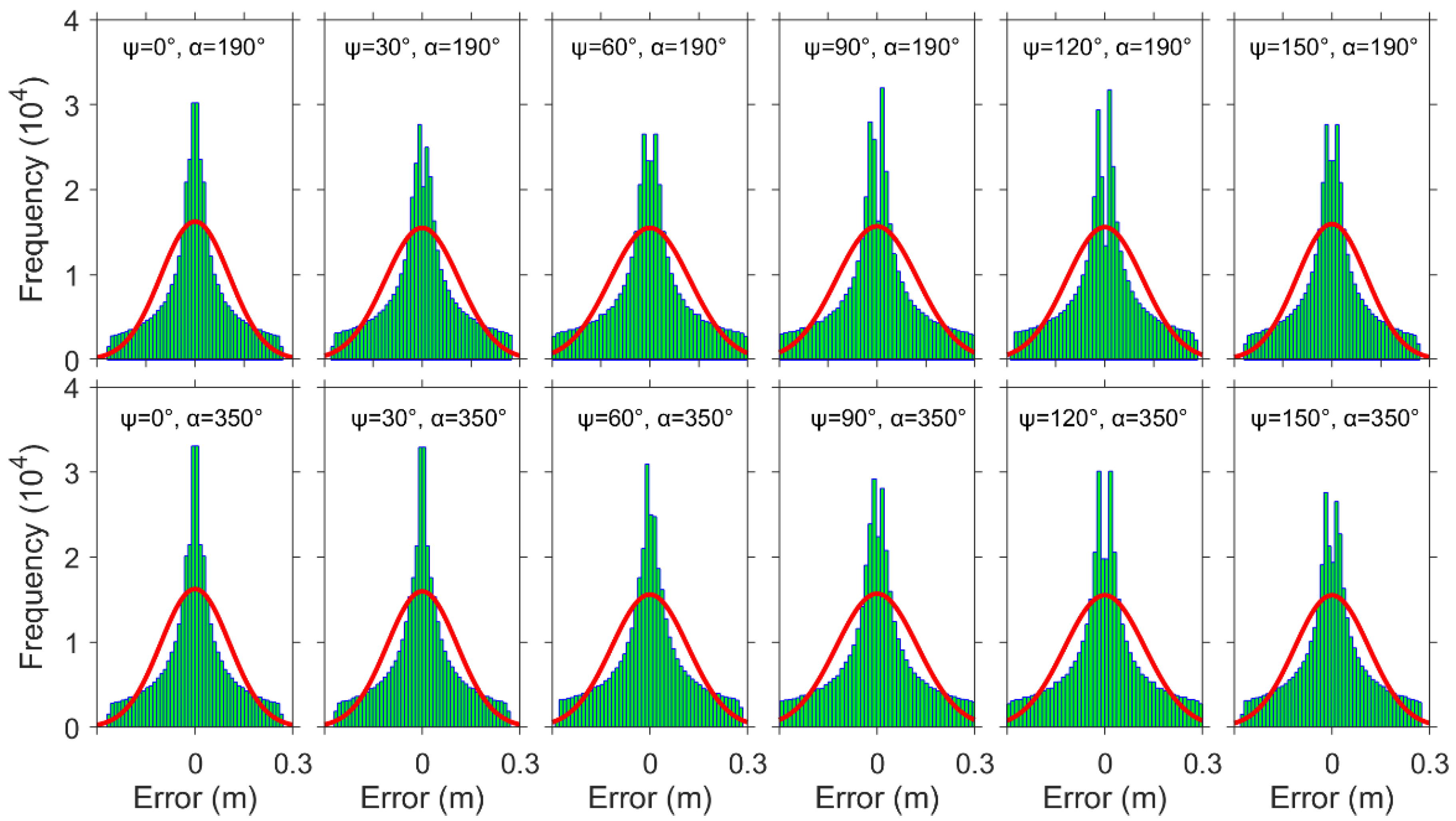
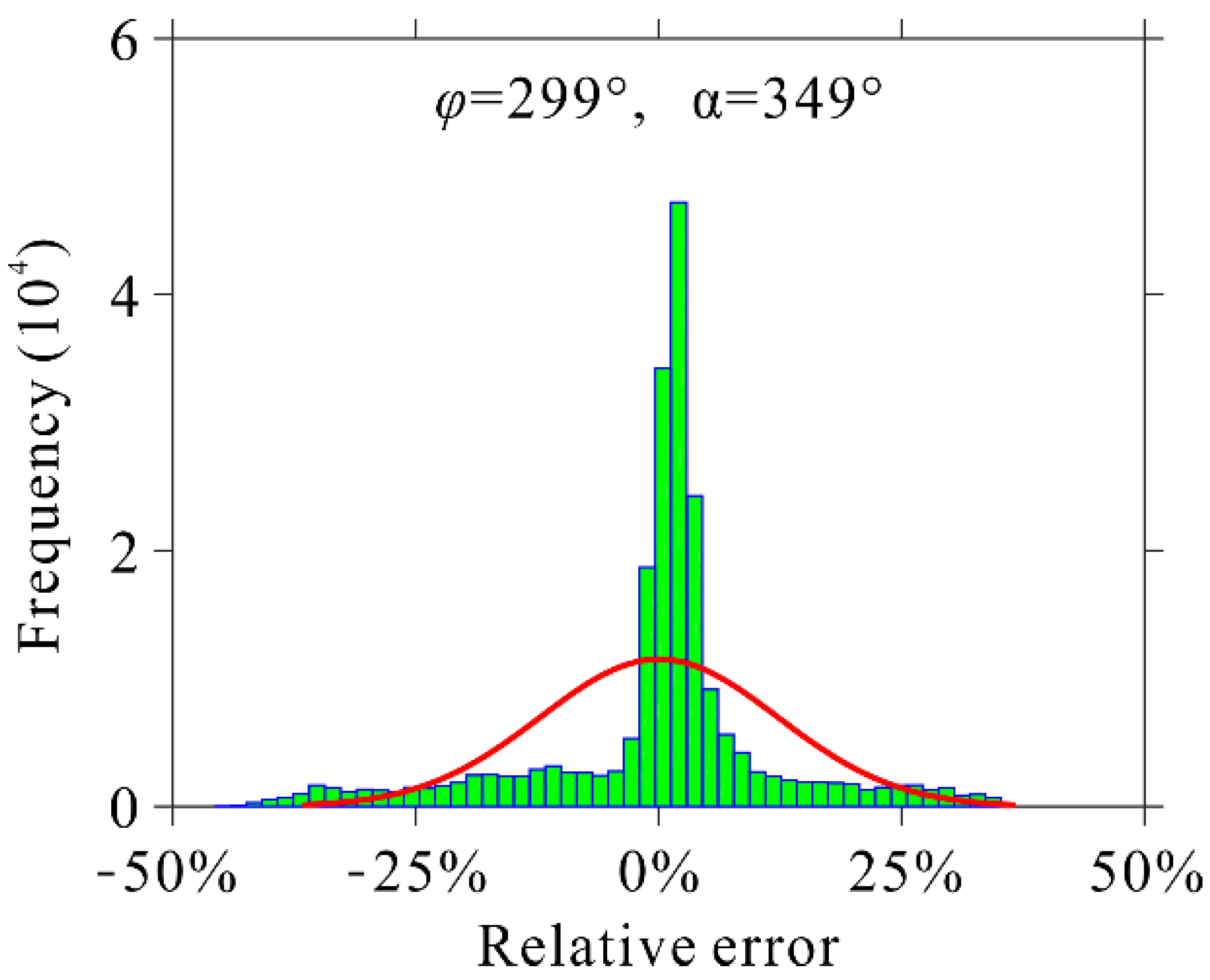
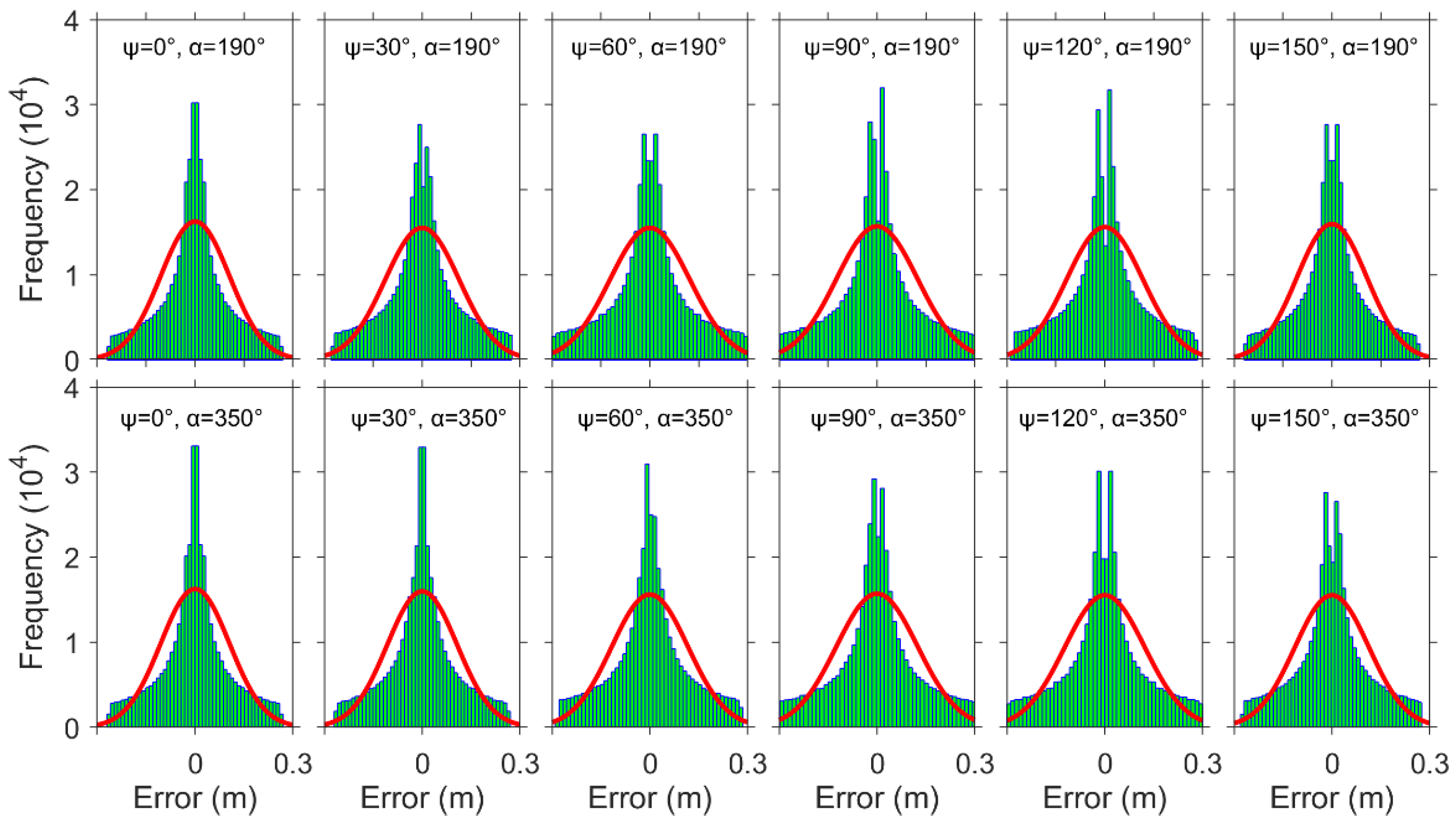
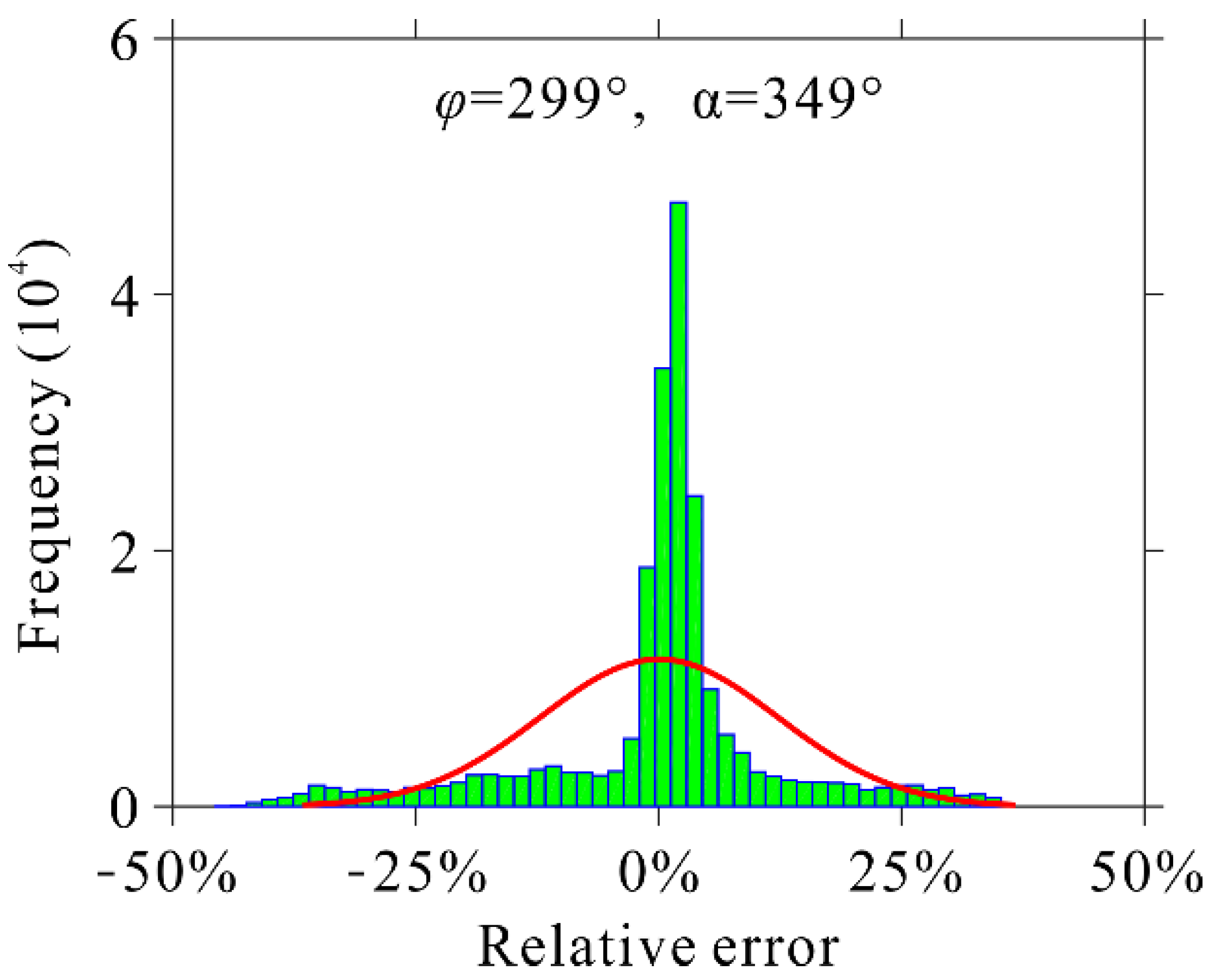
4.1.1. Histogram Analysis of the Errors
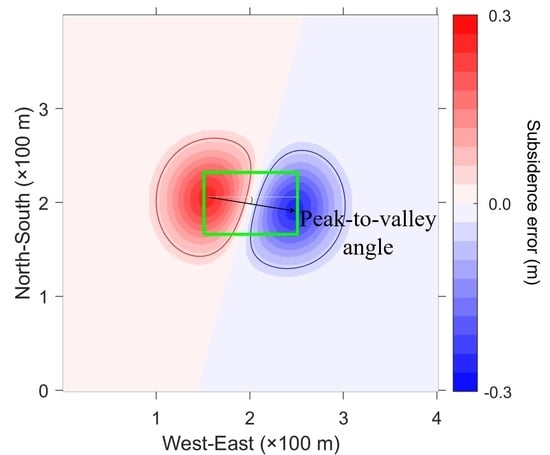
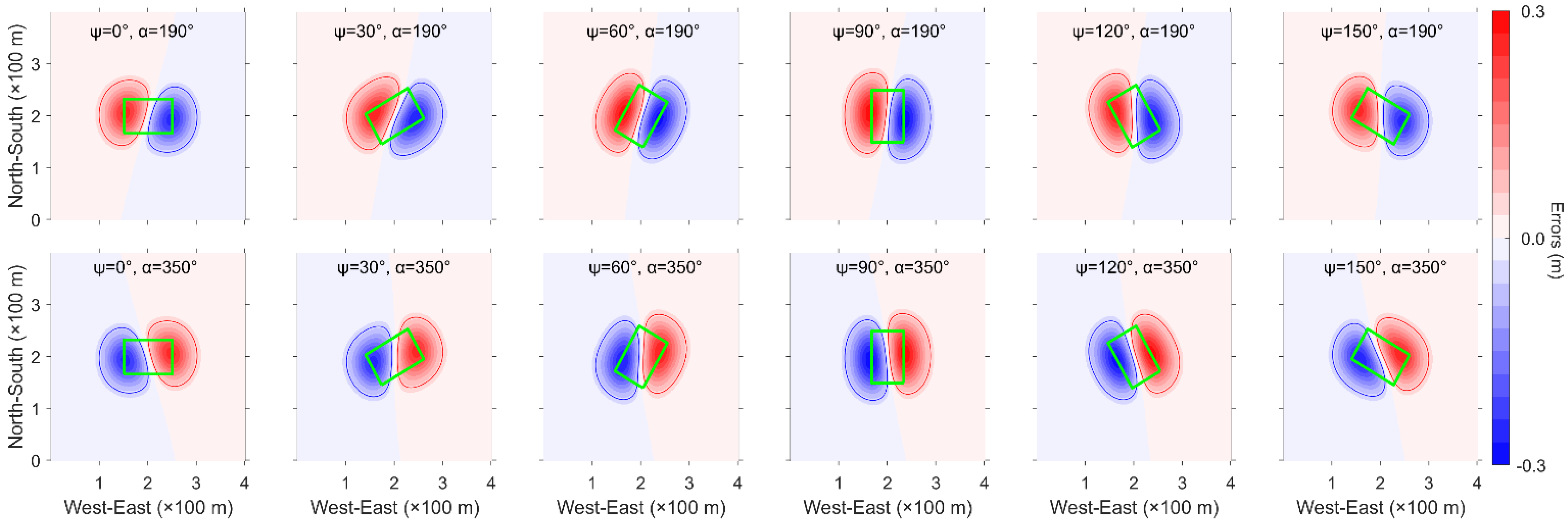
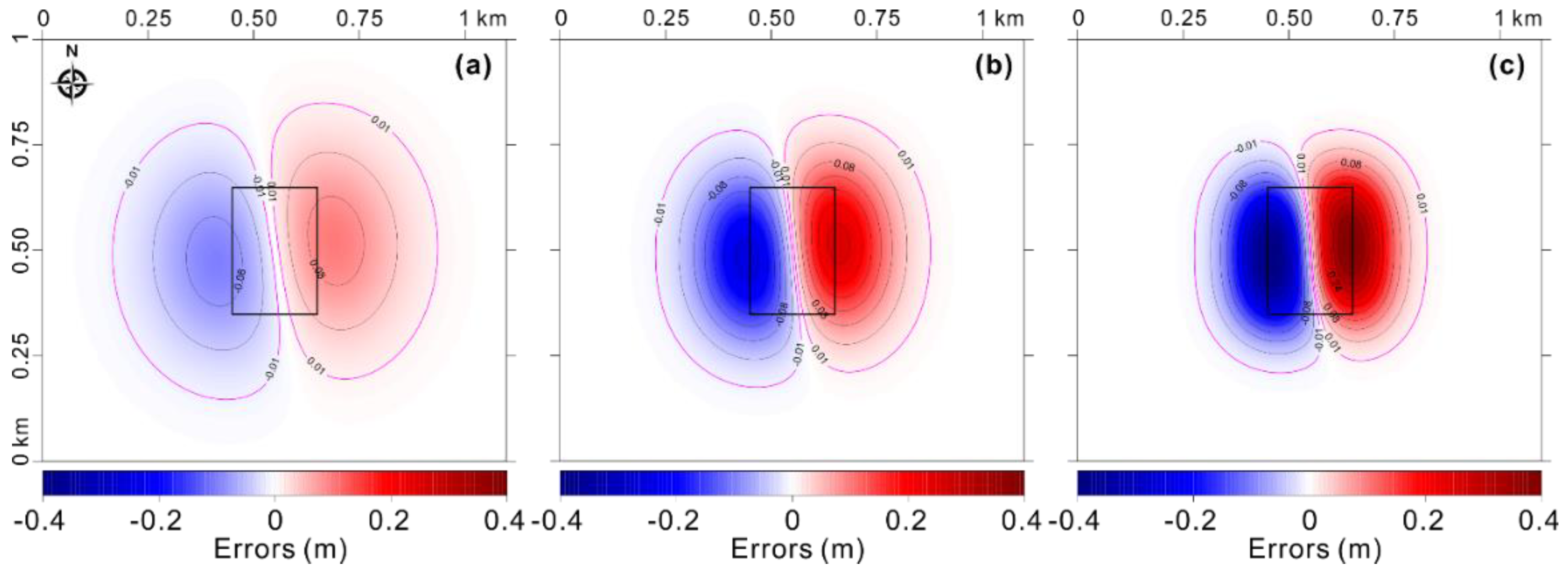
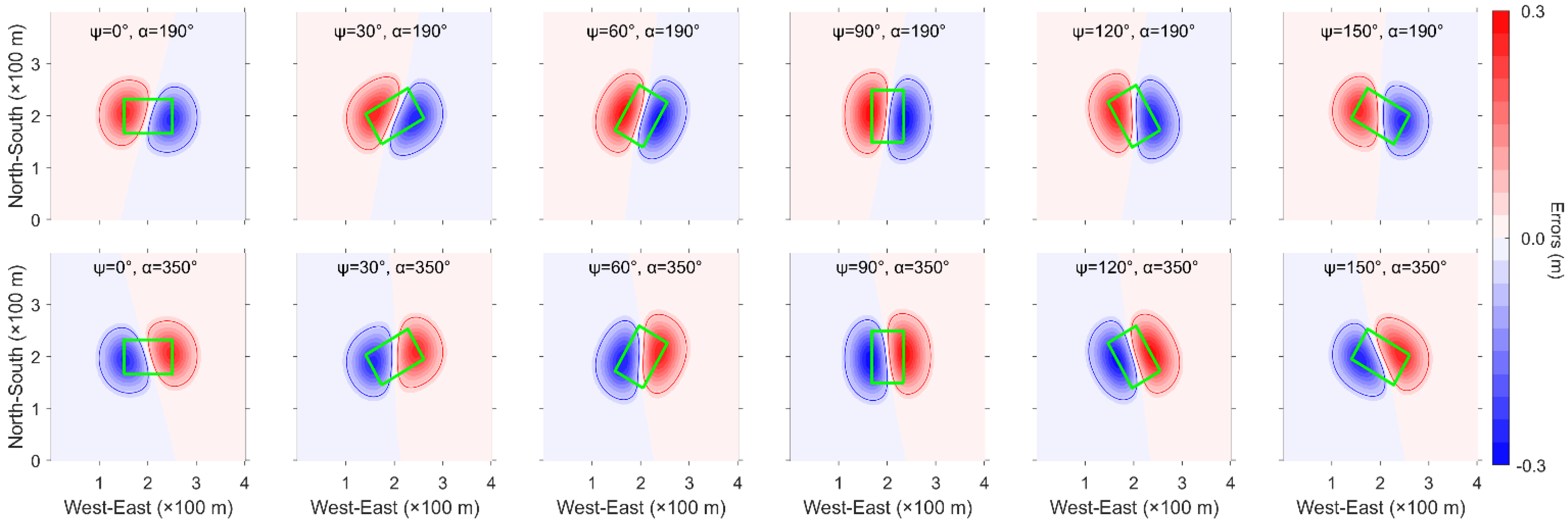
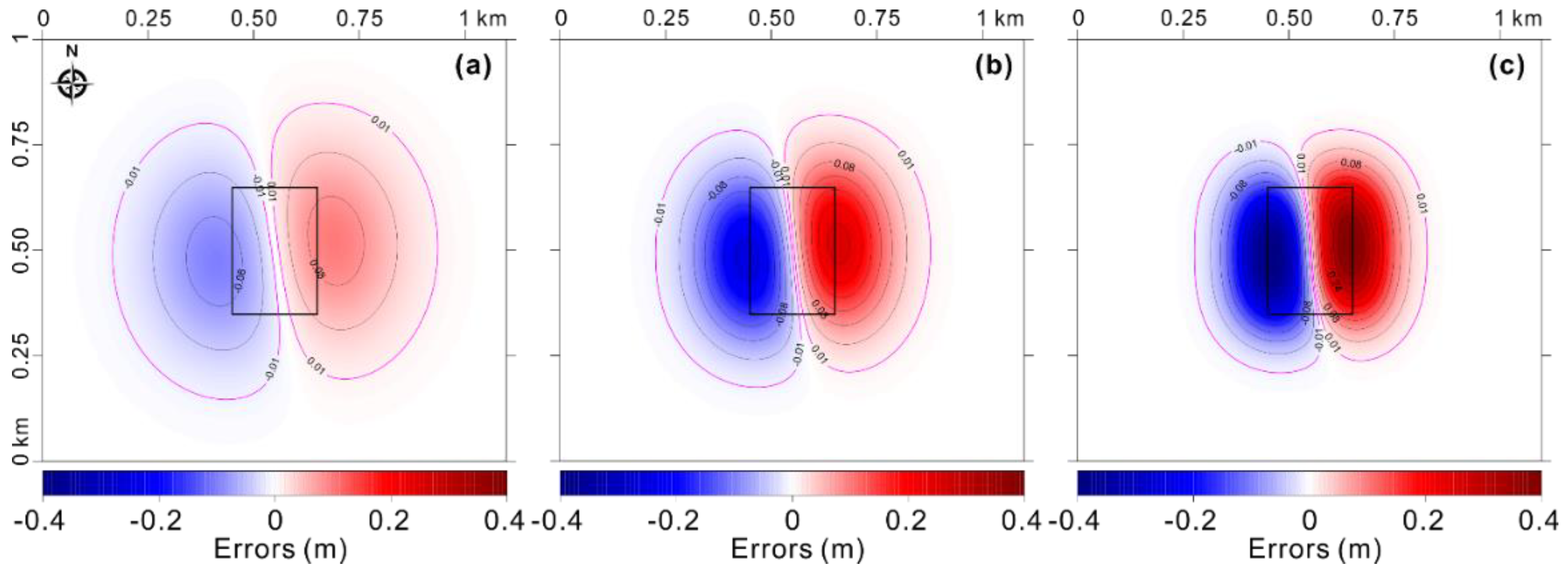
4.1.2. Spatial Pattern of the Errors
4.2. Impact Factors on the NOV-Estimated Subsidence Errors
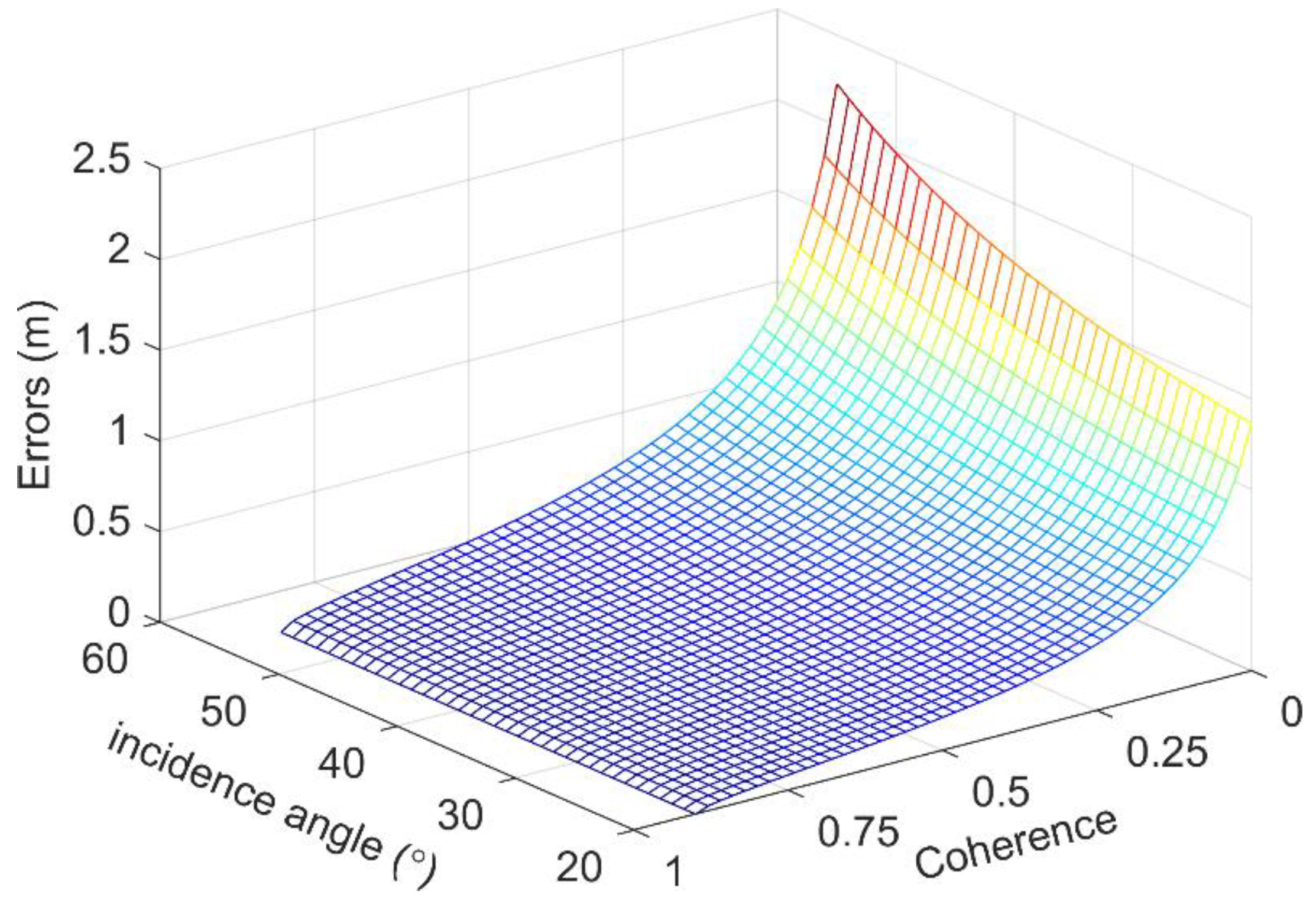
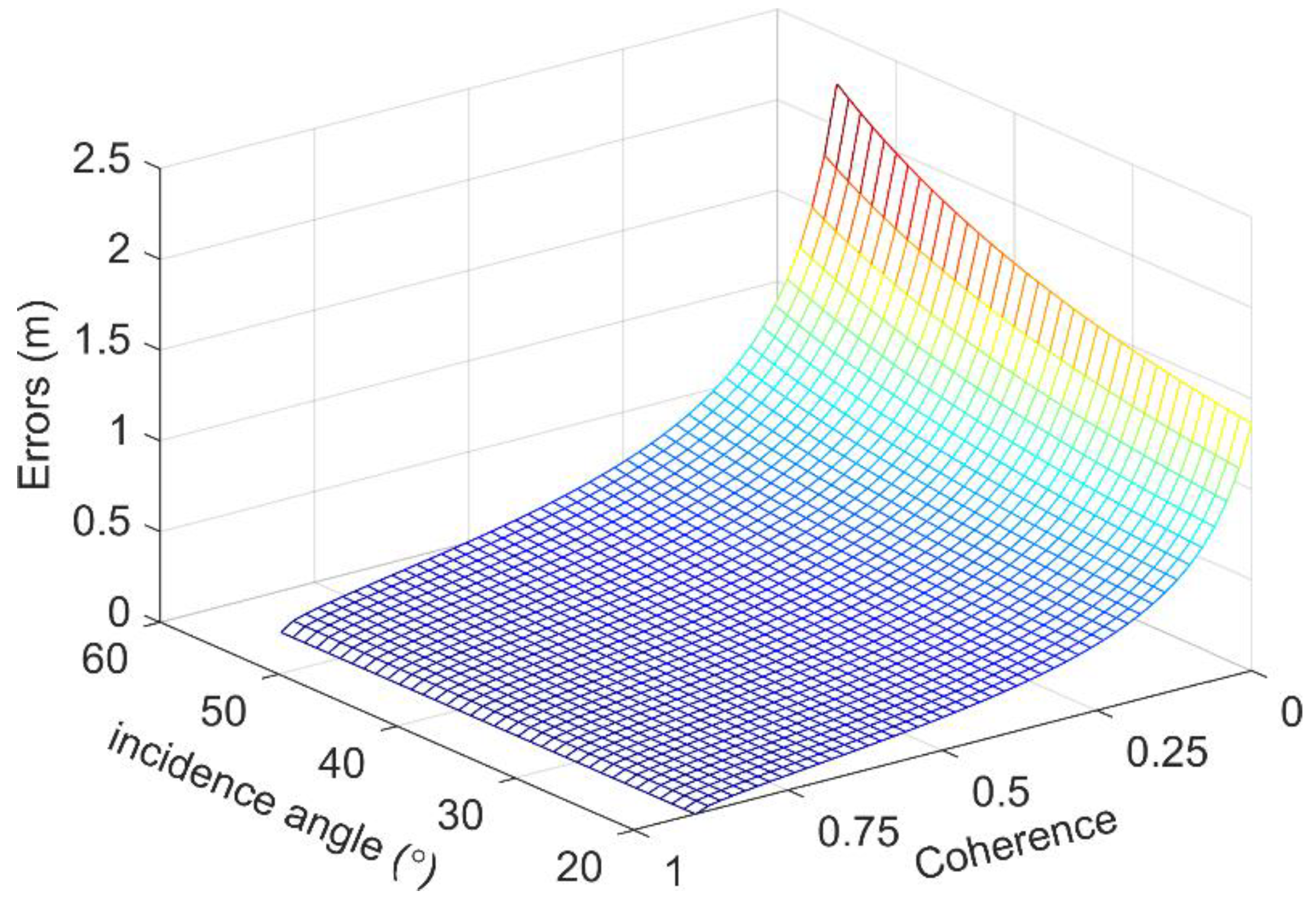
4.2.1. Influence of Interferometric Coherence
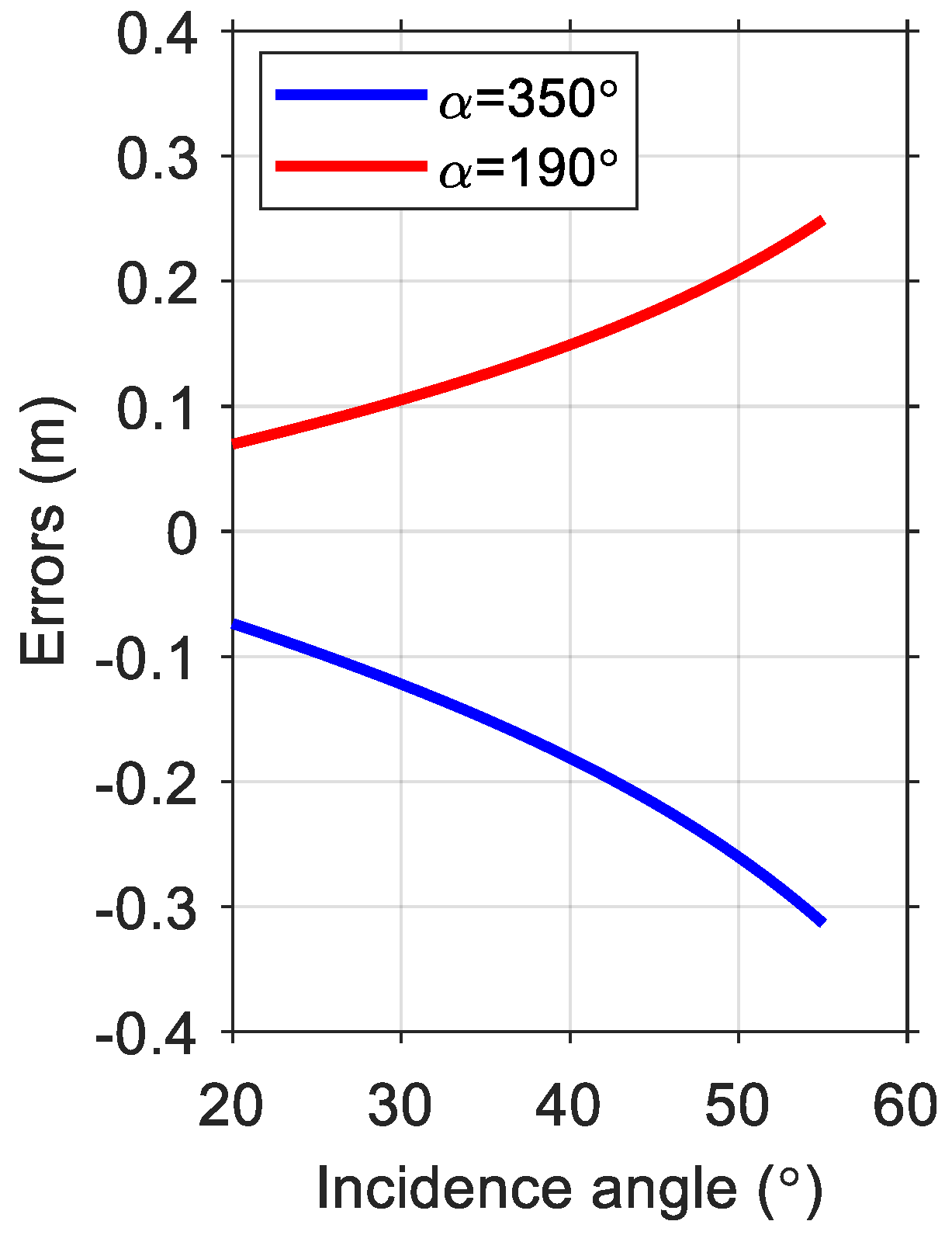
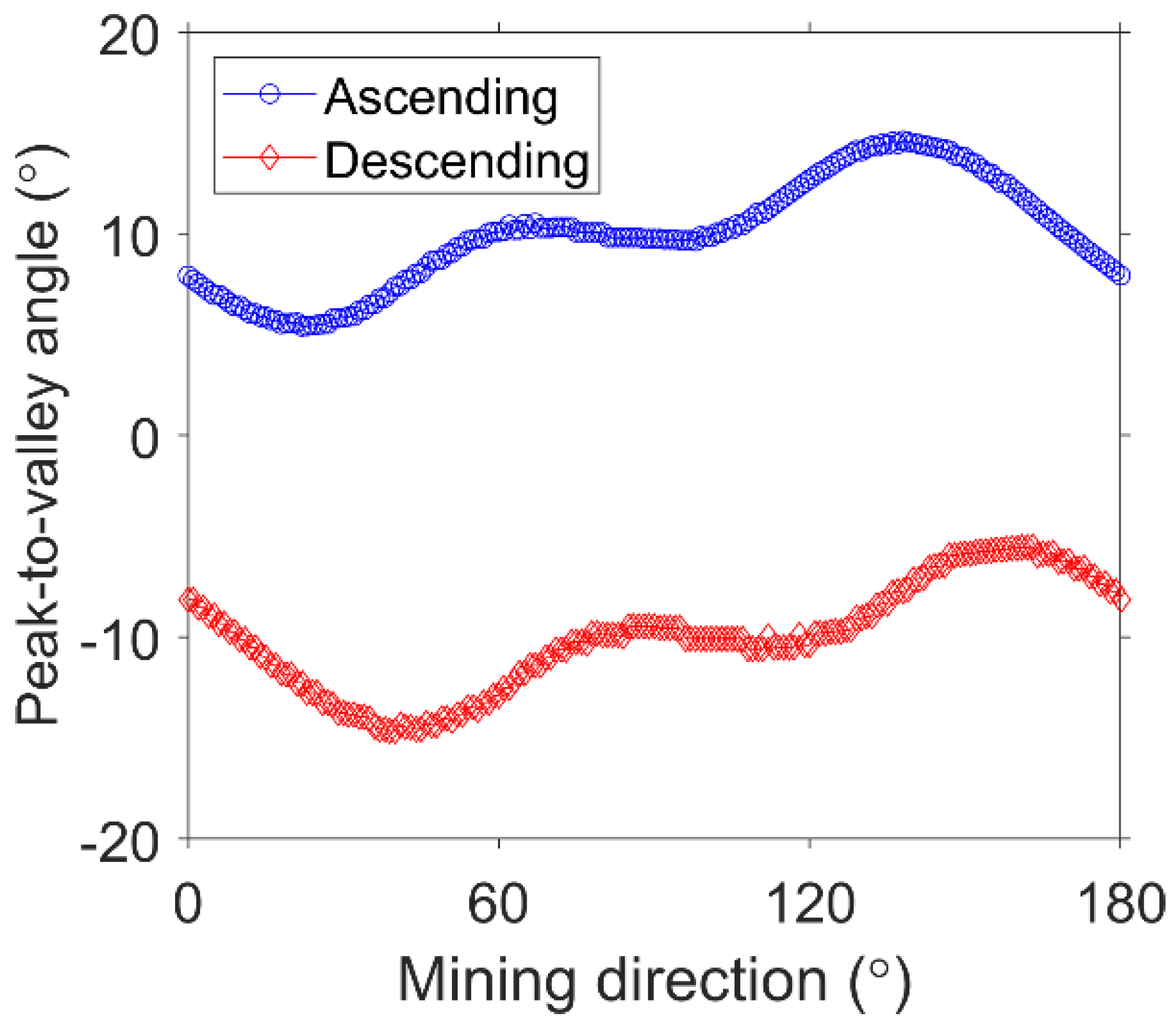
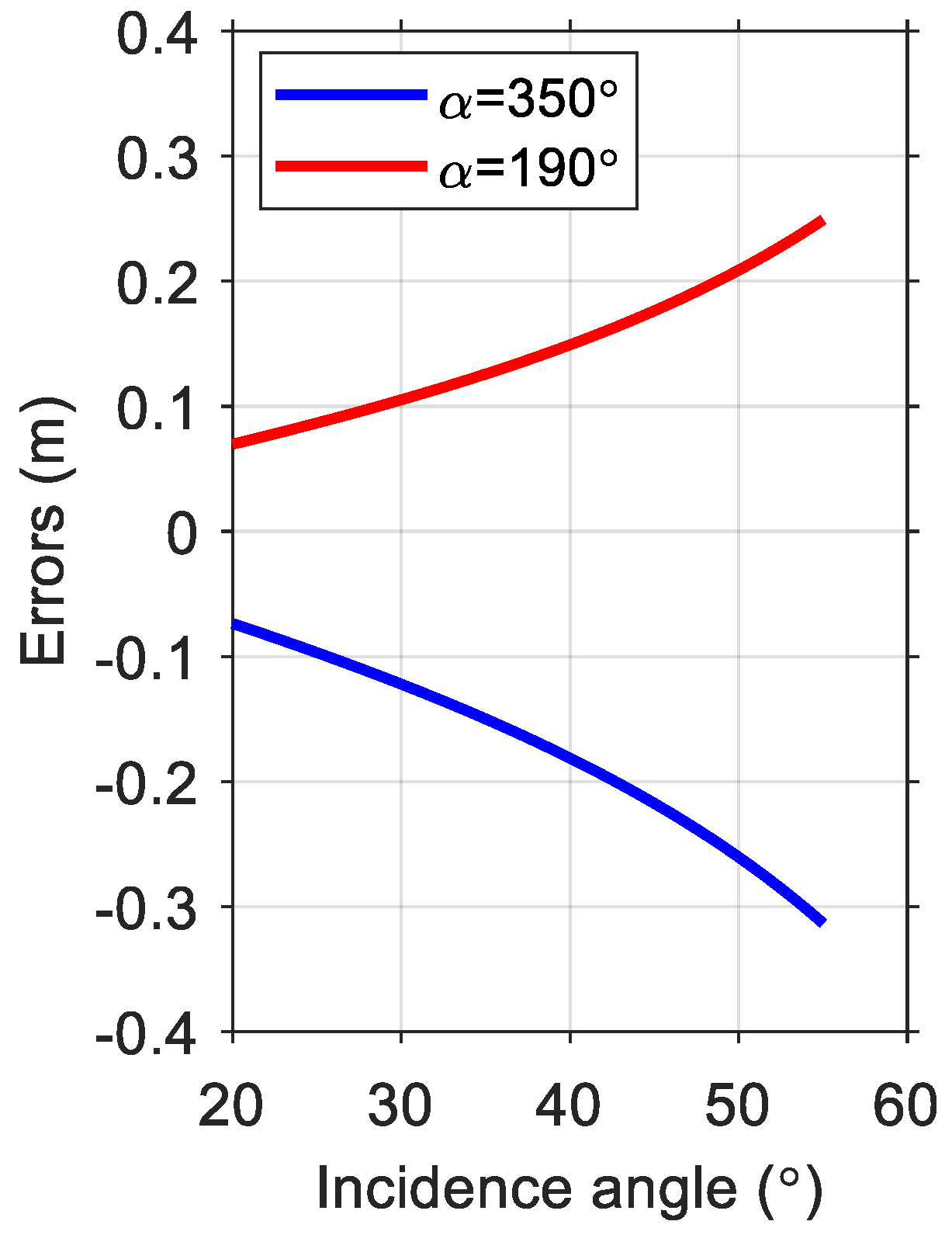
4.2.2. Influence of SAR Imaging Views
4.2.3. Influence of the Lithology of Overlying Rock Strata
4.3. Influence of the Error of the NOV-Estimated Mining Subsidence on Its Typical Uses
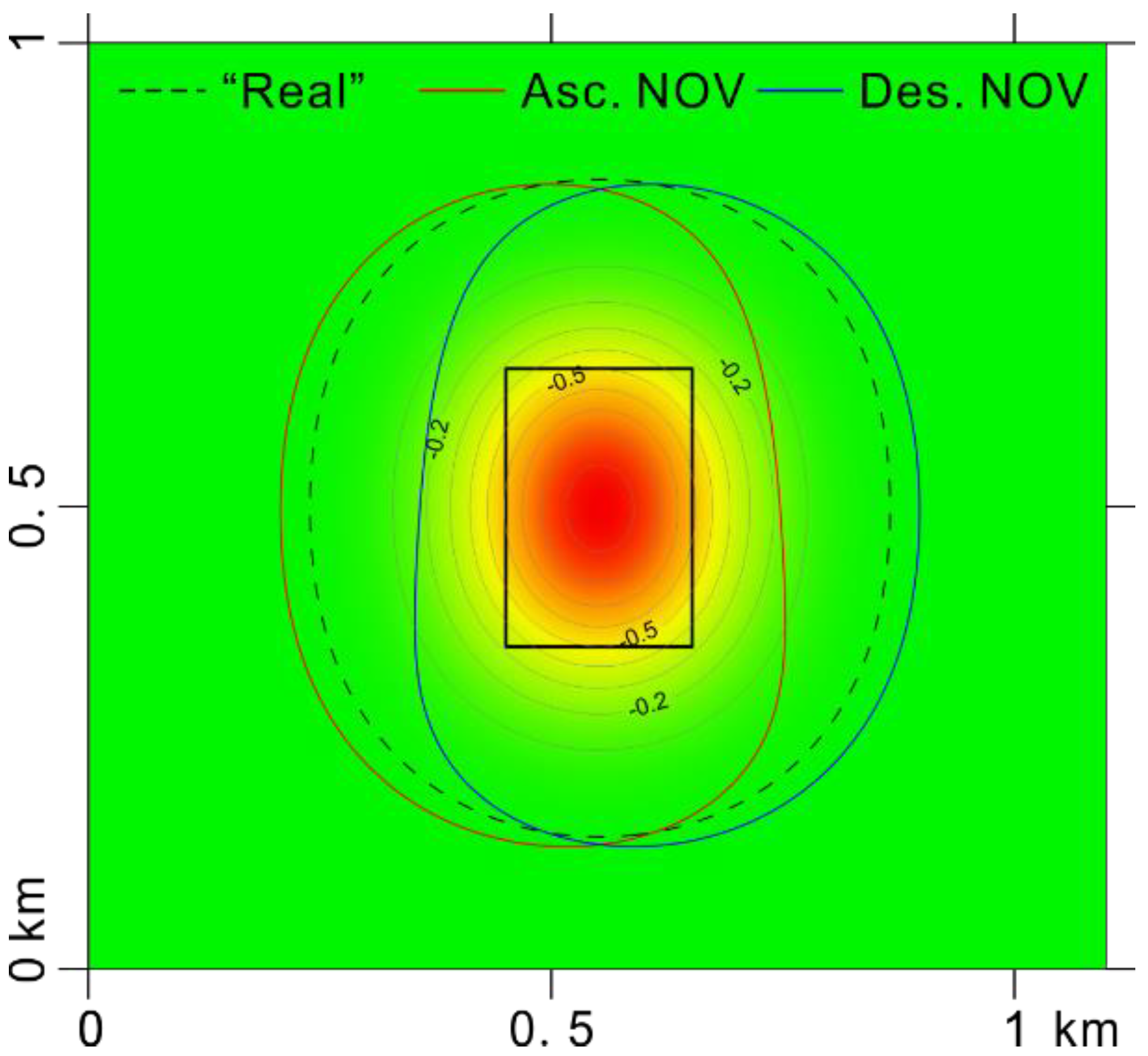
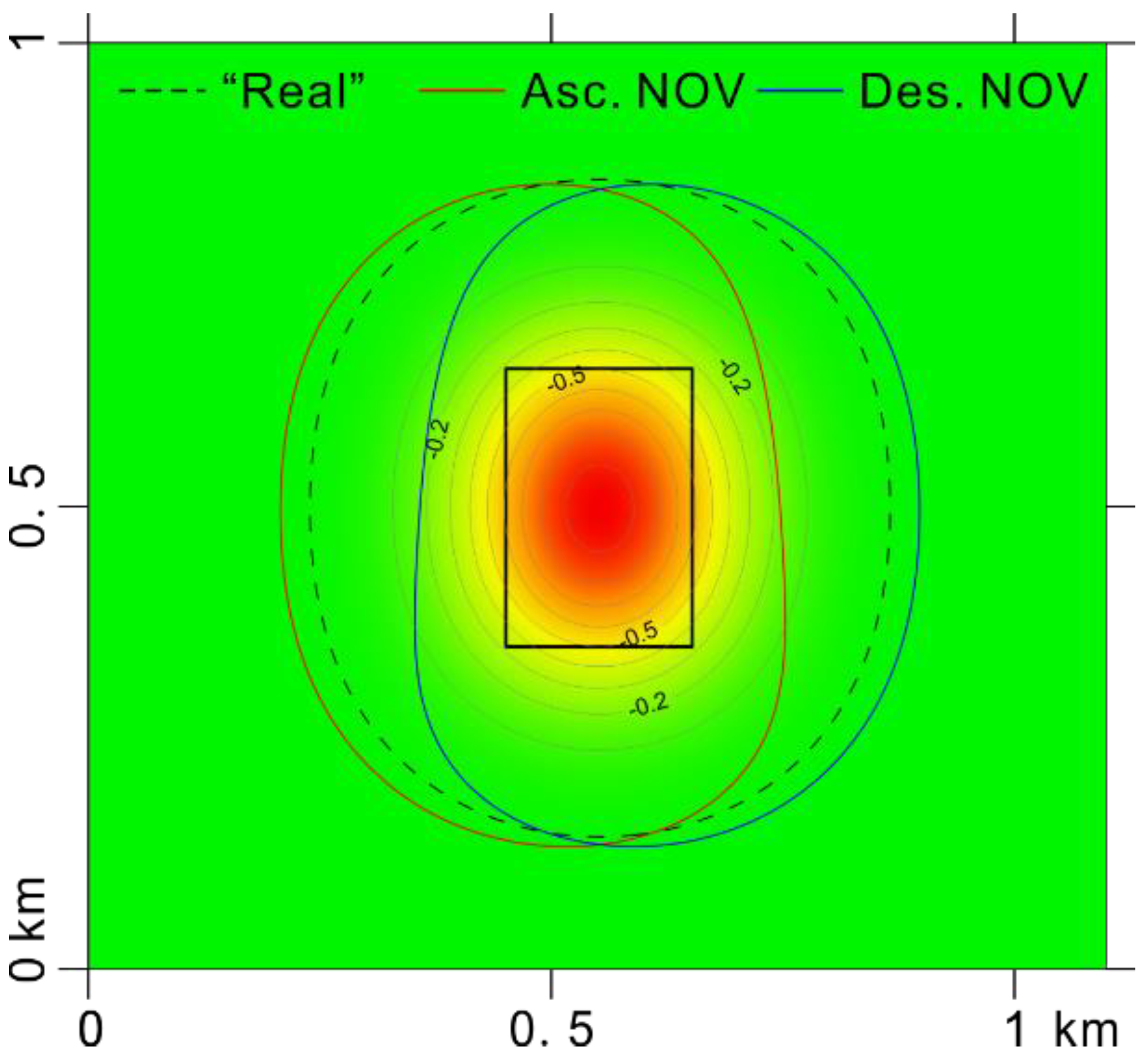
4.3.1. Influence on the Boundary Delimitation of Mining Subsidence
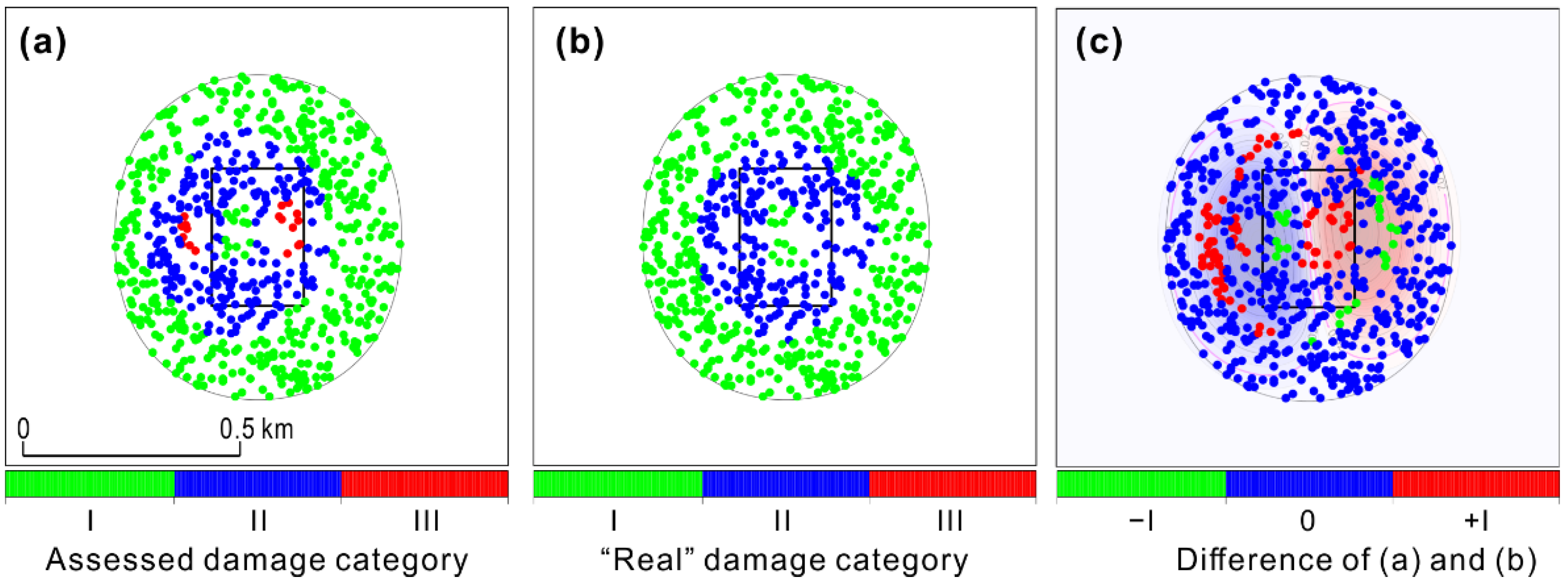
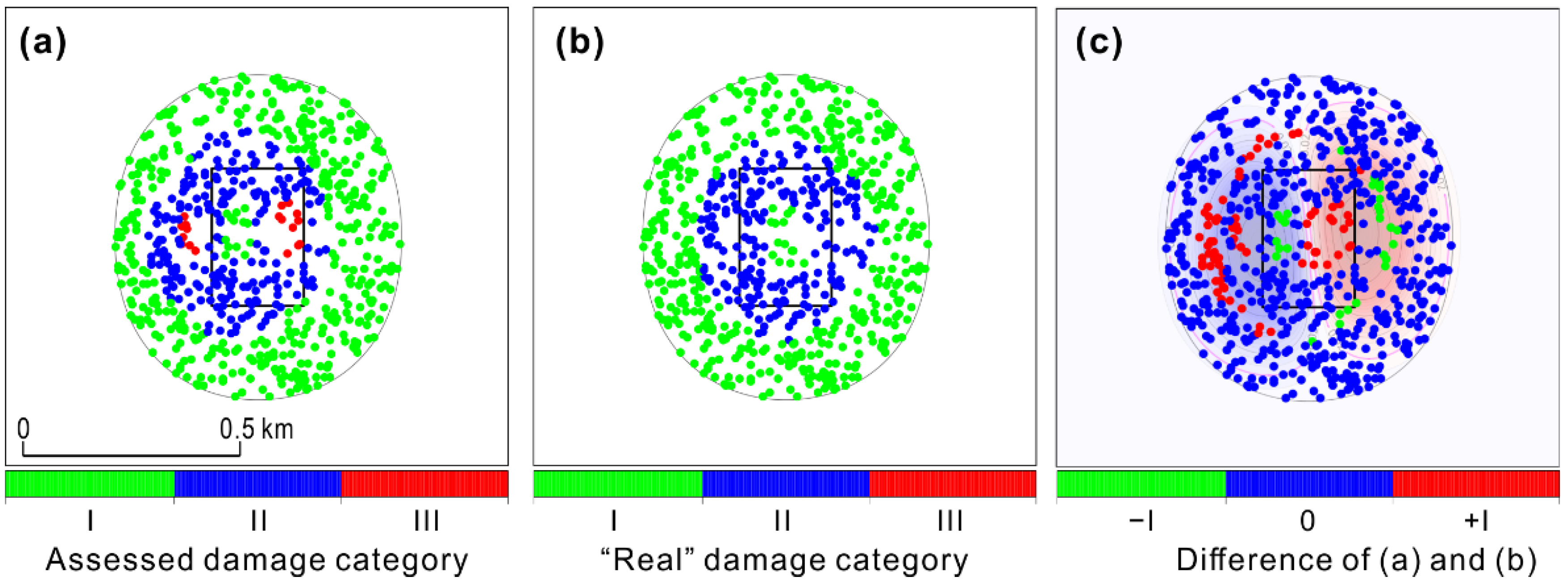
4.3.2. Influence on the Assessment of Mining-Induced Building Damage Risk
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Carnec, C.; Delacourt, C. Three years of mining subsidence monitored by SAR interferometry, near Gardanne, France. J. Appl. Geophys. 2000, 43, 43–54. [Google Scholar] [CrossRef]
- Gueguen, Y.; Deffontaines, B.; Fruneau, B.; Al Heib, M.; de Michele, M.; Raucoules, D.; Guise, Y.; Planchenault, J. Monitoring residual mining subsidence of Nord/Pas-de-Calais coal basin from differential and Persistent Scatterer Interferometry (Northern France). J. Appl. Geophys. 2009, 69, 24–34. [Google Scholar] [CrossRef]
- Ng, A.H.M.; Ge, L.; Du, Z.; Wang, S.; Ma, C. Satellite radar interferometry for monitoring subsidence induced by longwall mining activity using Radarsat-2, Sentinel-1 and ALOS-2 data. Int. J. Appl. Earth Obs. Geoinf. 2017, 61, 92–103. [Google Scholar] [CrossRef]
- Paradella, W.R.; Ferretti, A.; Mura, J.C.; Colombo, D.; Gama, F.F.; Tamburini, A.; Santos, A.R.; Novali, F.; Galo, M.; Camargo, P.O. Mapping surface deformation in open pit iron mines of Carajás Province (Amazon Region) using an integrated SAR analysis. Eng. Geol. 2015, 193, 61–78. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Li, Z.; Zhu, J.; Yi, H.; Hu, J.; Feng, G. Deriving dynamic subsidence of coal mining areas using InSAR and logistic model. Remote Sens. 2017, 9, 125. [Google Scholar] [CrossRef] [Green Version]
- Ilieva, M.; Polanin, P.; Borkowski, A.; Gruchlik, P.; Smolak, K.; Kowalski, A.; Rohm, W. Mining deformation life cycle in the light of InSAR and deformation models. Remote Sens. 2019, 11, 745. [Google Scholar] [CrossRef] [Green Version]
- Hanssen, R.F. Radar Interferometry: Data Interpretation and Error Analysis; Springer Science & Business Media: New York, NY, USA, 2001. [Google Scholar]
- Dong, L.; Wang, C.; Tang, Y.; Tang, F.; Zhang, H.; Wang, J.; Duan, W. Time series InSAR three-dimensional displacement inversion model of coal mining areas based on symmetrical features of mining subsidence. Remote Sens. 2021, 13, 2143. [Google Scholar] [CrossRef]
- Fialko, Y.; Sandwell, D.; Simons, M.; Rosen, P. Three-dimensional deformation caused by the Bam, Iran, earthquake and the origin of shallow slip deficit. Nature 2005, 435, 295–299. [Google Scholar] [CrossRef]
- Samsonov, S.; Dille, A.; Dewitte, O.; Kervyn, F.; d’Oreye, N. Satellite interferometry for mapping surface deformation time series in one, two and three dimensions: A new method illustrated on a slow-moving landslide. Eng. Geol. 2020, 266, 105471. [Google Scholar] [CrossRef]
- Wang, Z.; Yu, S.; Tao, Q.; Liu, G.; Hao, H.; Wang, K.; Zhou, C. A method of monitoring three-dimensional ground displacement in mining areas by integrating multiple InSAR methods. Int. J. Remote Sens. 2018, 39, 1199–1219. [Google Scholar] [CrossRef]
- Chen, B.; Li, Z.; Yu, C.; Fairbairn, D.; Kang, J.; Hu, J.; Liang, L. Three-dimensional time-varying large surface displacements in coal exploiting areas revealed through integration of SAR pixel offset measurements and mining subsidence model. Remote Sens. Environ. 2020, 240, 111663. [Google Scholar] [CrossRef]
- Alex, H.-M.N.; Ge, L.L.; Zhang, K.; Li, X.J. Estimating horizontal and vertical movements due to underground mining using ALOS PALSAR. Eng. Geol. 2012, 143, 18–27. [Google Scholar] [CrossRef]
- Yang, Z.; Li, Z.; Zhu, J.; Feng, G.; Wang, Q.; Hu, J.; Wang, C. Deriving time-series three-dimensional displacements of mining areas from a single-geometry InSAR dataset. J. Geod. 2018, 92, 15. [Google Scholar] [CrossRef]
- Yang, Z.; Zhu, J.; Xie, J.; Li, Z.; Wu, L.; Ma, Z. Resolving 3-D Mining Displacements From Multi-Track InSAR by Incorporating With a Prior Model: The Dynamic Changes and Adaptive Estimation of the Model Parameters. IEEE Trans. Geosci. Remote Sens. 2021, 60, 4504610. [Google Scholar] [CrossRef]
- Yang, Z.; Li, Z.; Zhu, J.; Wang, Y.; Wu, L. Use of SAR/InSAR in mining deformation monitoring, parameter inversion, and forward prediction: A review. IEEE Geosci. Remote Sens. Mag. 2020, 8, 71–90. [Google Scholar] [CrossRef]
- Liu, D.; Shao, Y.; Liu, Z.; Riedel, B.; Sowter, A.; Niemeier, W.; Bian, Z. Evaluation of InSAR and TomoSAR for monitoring deformations caused by mining in a mountainous area with high resolution satellite-based SAR. Remote Sens. 2014, 6, 1476–1495. [Google Scholar] [CrossRef] [Green Version]
- Yuan, M.; Li, M.; Liu, H.; Lv, P.; Li, B.; Zheng, W. Subsidence Monitoring Base on SBAS-InSAR and Slope Stability Analysis Method for Damage Analysis in Mountainous Mining Subsidence Regions. Remote Sens. 2021, 13, 3107. [Google Scholar] [CrossRef]
- Diao, X.; Bai, Z.; Wu, K.; Zhou, D.; Li, Z. Assessment of mining-induced damage to structures using InSAR time series analysis: A case study of Jiulong Mine, China. Environ. Earth Sci. 2018, 77, 166. [Google Scholar] [CrossRef]
- Li, J.; Gao, F.; Lu, J. An application of InSAR time-series analysis for the assessment of mining-induced structural damage in Panji Mine, China. Nat. Hazards 2019, 97, 243–258. [Google Scholar] [CrossRef]
- Chen, D.; Chen, H.; Zhang, W.; Cao, C.; Zhu, K.; Yuan, X.; Du, Y. Characteristics of the residual surface deformation of multiple abandoned mined-out areas based on a field investigation and SBAS-InSAR: A case study in Jilin, China. Remote Sens. 2020, 12, 3752. [Google Scholar] [CrossRef]
- Modeste, G.; Doubre, C.; Masson, F. Time evolution of mining-related residual subsidence monitored over a 24-year period using InSAR in southern Alsace, France. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102392. [Google Scholar] [CrossRef]
- Owczarz, K.; Blachowski, J.J.A.S. Application of DInSAR and Spatial Statistics Methods in Analysis of Surface Displacements Caused by Induced Tremors. Appl. Sci. 2020, 10, 7660. [Google Scholar] [CrossRef]
- Holla, L. Ground movement due to longwall mining in high relief areas in New South Wales, Australia. Int. J. Rock Mech. Min. Sci. 1997, 34, 775–787. [Google Scholar] [CrossRef]
- Seedsman, R.; Watson, G. Sensitive infrastructure and horizontal ground movements at Newstan Colliery. In Proceedings of the 5th Triennial Conference on Coal Mine Subsidence 2001 Current Practice and Issues, Maitland, NSW, Australia, 26–28 August 2001; pp. 171–179. [Google Scholar]
- Samieie-Esfahany, S.; Hanssen, R.; van Thienen-Visser, K.; Muntendam-Bos, A. On the effect of horizontal deformation on InSAR subsidence estimates. In Proceedings of the Fringe 2009 Workshop, Frascati, Italy, 30 November–4 December 2009. [Google Scholar]
- Fuhrmann, T.; Garthwaite, M.C. Resolving three-dimensional surface motion with InSAR: Constraints from multi-geometry data fusion. Remote Sens. 2019, 11, 241. [Google Scholar] [CrossRef] [Green Version]
- Fialko, Y.; Simons, M.; Agnew, D. The complete (3-D) surface displacement field in the epicentral area of the 1999 Mw7. 1 Hector Mine earthquake, California, from space geodetic observations. Geophys. Res. Lett. 2001, 28, 3063–3066. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Yang, Z.; Zhu, J.; Hu, J.; Wang, Y.; Li, P.; Chen, G. Retrieving three-dimensional displacement fields of mining areas from a single InSAR pair. J. Geod. 2015, 89, 17–32. [Google Scholar] [CrossRef]
- Peng, S.S.; Ma, W.; Zhong, W. Surface Subsidence Engineering; Society for Mining, Metallurgy, and Exploration: Littleton, CO, USA, 1992. [Google Scholar]
- Blanco-Sanchez, P.; Mallorquí, J.J.; Duque, S.; Monells, D. The coherent pixels technique (CPT): An advanced DInSAR technique for nonlinear deformation monitoring. In Earth Sciences and Mathematics; Springer: Cham, Switzerland, 2008; pp. 1167–1193. [Google Scholar]
- He, G.; Yang, L.; Lin, G. Mining Subsidence Engineering; Press of China University of Mining and Technology: Xuzhou, China, 1991. [Google Scholar]
- Yang, Z.; Li, Z.; Zhu, J.; Hu, J.; Wang, Y.; Chen, G. InSAR-based model parameter estimation of probability integral method and its application for predicting mining-induced horizontal and vertical displacements. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4818–4832. [Google Scholar] [CrossRef]
- Casella, G.; Berger, R.L. Statistical Inference; Duxbury: Pacific Grove, CA, USA, 2002; Volume 2. [Google Scholar]
- Peng, S. Surface Subsidence Engineering: Theory and Practice; CSIRO Publishing: Melbourne, VIC, Australia, 2020. [Google Scholar]
- Pepe, A.; Calò, F. A review of interferometric synthetic aperture RADAR (InSAR) multi-track approaches for the retrieval of Earth’s surface displacements. Appl. Sci. 2017, 7, 1264. [Google Scholar] [CrossRef] [Green Version]
- Lopez-Martinez, C.; Pottier, E.J.I.T.o.G.; Sensing, R. On the extension of multidimensional speckle noise model from single-look to multilook SAR imagery. IEEE Trans. Geosci. Remote Sens. 2007, 45, 305–320. [Google Scholar] [CrossRef]
- Reddish, D.; Whittaker, B. Subsidence: Occurrence, Prediction and Control; Elsevier: Amsterdam, The Netherlands, 2012. [Google Scholar]
- State Bureau of Coal Industry of China. Regulations on Mining and Coal Pillar Design under Building, Water Body, Railway and Main Shaft; China National Coal Group: Beijing, China, 2000. [Google Scholar]
- Boone, S.J. Ground-movement-related building damage. J. Geotech. Eng. 1996, 122, 886–896. [Google Scholar] [CrossRef]
- Dai, H.; Wang, J.; Cai, M.; Wu, L.; Guo, Z. Seam dip angle based mining subsidence model and its application. Int. J. Rock Mech. Min. Sci. 2002, 39, 115–123. [Google Scholar] [CrossRef]
- Franks, C.; Geddes, J. Subsidence on steep slopes due to longwall mining. Int. J. Mining Geolog. Eng. 1986, 4, 291–301. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters of the PIM | Lithology of Overlying Rock Strata | ||
|---|---|---|---|
| Hard | Medium | Soft | |
| q | 0.27~0.54 | 0.55~0.85 | 0.86~1.0 |
| tanβ | 1.2~1.91 | 1.92~2.4 | 2.41~3.54 |
| Indicators | Lithology of Overlying Rock Strata | ||
|---|---|---|---|
| Hard | Medium | Soft | |
| STD | 0.05 m | 0.11 m | 0.17 m |
| Influence area | 0.40 m2 | 0.33 m2 | 0.26 m2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Z.; Yang, Z.; Xing, X. Analyzing the Error Pattern of InSAR-Based Mining Subsidence Estimation Caused by Neglecting Horizontal Movements. Remote Sens. 2022, 14, 1963. https://doi.org/10.3390/rs14091963
Ma Z, Yang Z, Xing X. Analyzing the Error Pattern of InSAR-Based Mining Subsidence Estimation Caused by Neglecting Horizontal Movements. Remote Sensing. 2022; 14(9):1963. https://doi.org/10.3390/rs14091963
Chicago/Turabian StyleMa, Zelin, Zefa Yang, and Xuemin Xing. 2022. "Analyzing the Error Pattern of InSAR-Based Mining Subsidence Estimation Caused by Neglecting Horizontal Movements" Remote Sensing 14, no. 9: 1963. https://doi.org/10.3390/rs14091963
APA StyleMa, Z., Yang, Z., & Xing, X. (2022). Analyzing the Error Pattern of InSAR-Based Mining Subsidence Estimation Caused by Neglecting Horizontal Movements. Remote Sensing, 14(9), 1963. https://doi.org/10.3390/rs14091963