
Spatiotemporal Fusion Modelling Using STARFM: Examples of Landsat 8 and Sentinel-2 NDVI in Bavaria

 ,
,  , and
, and 
Abstract
:1. Introduction
2. Materials and Methods
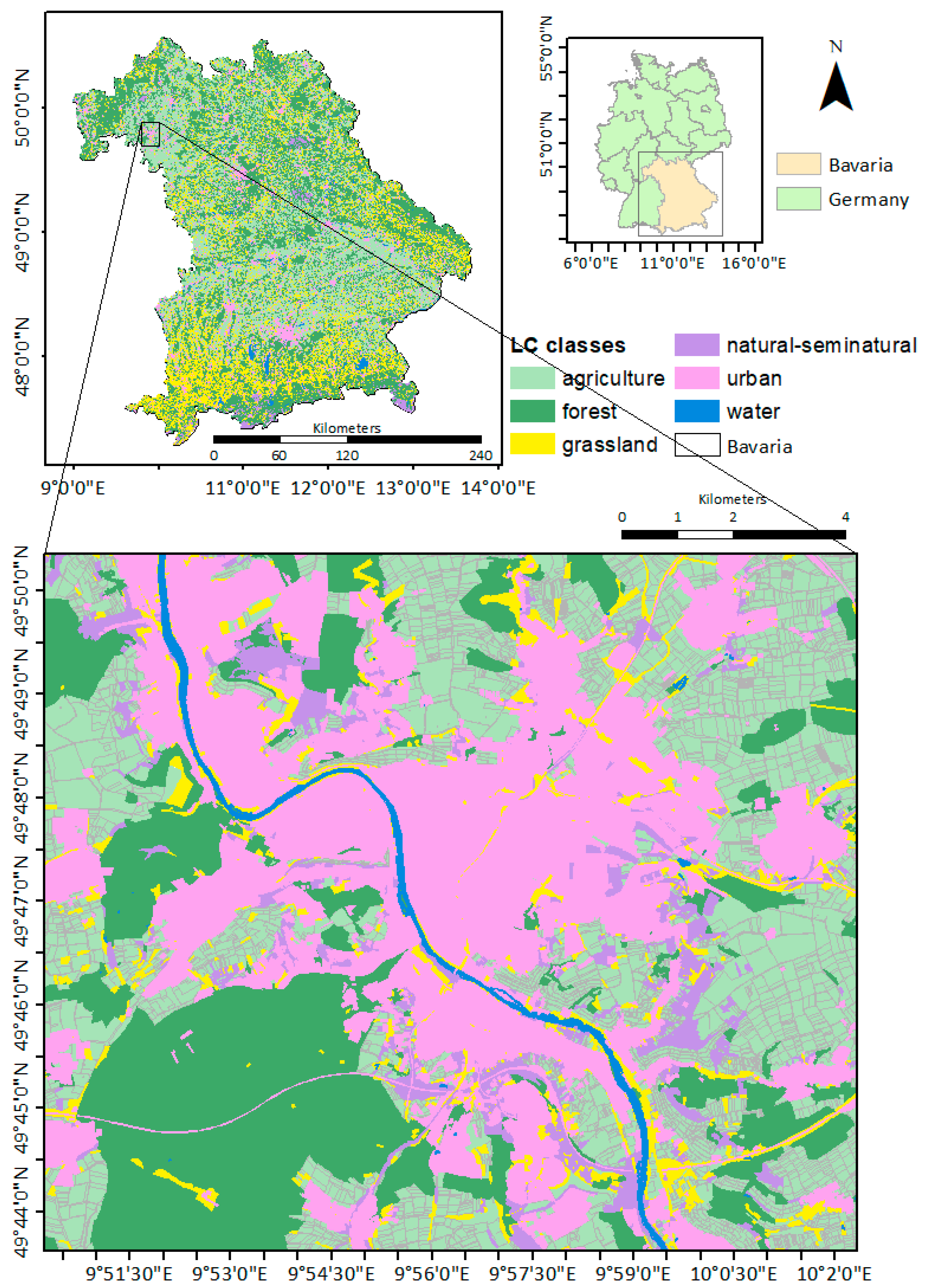
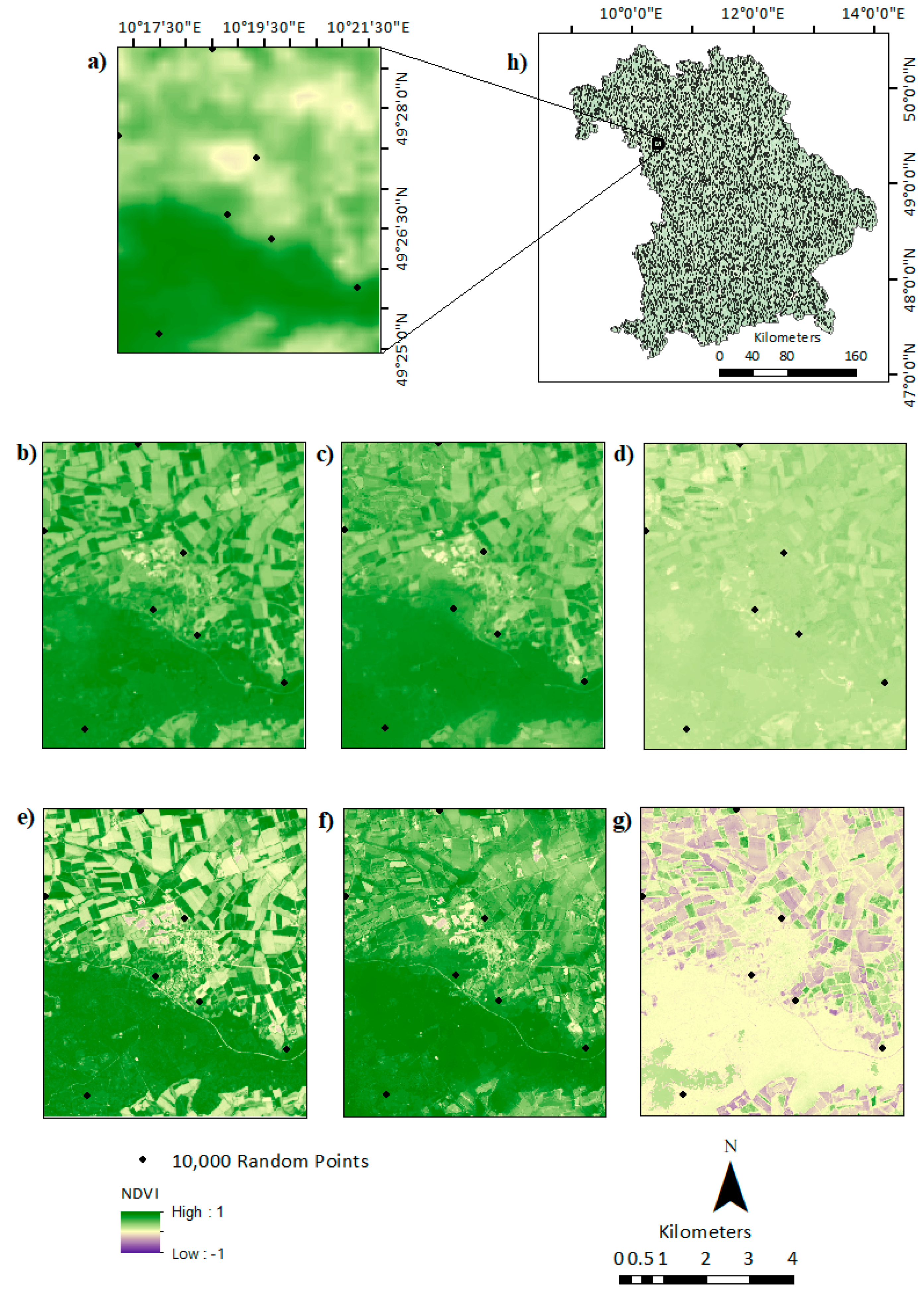
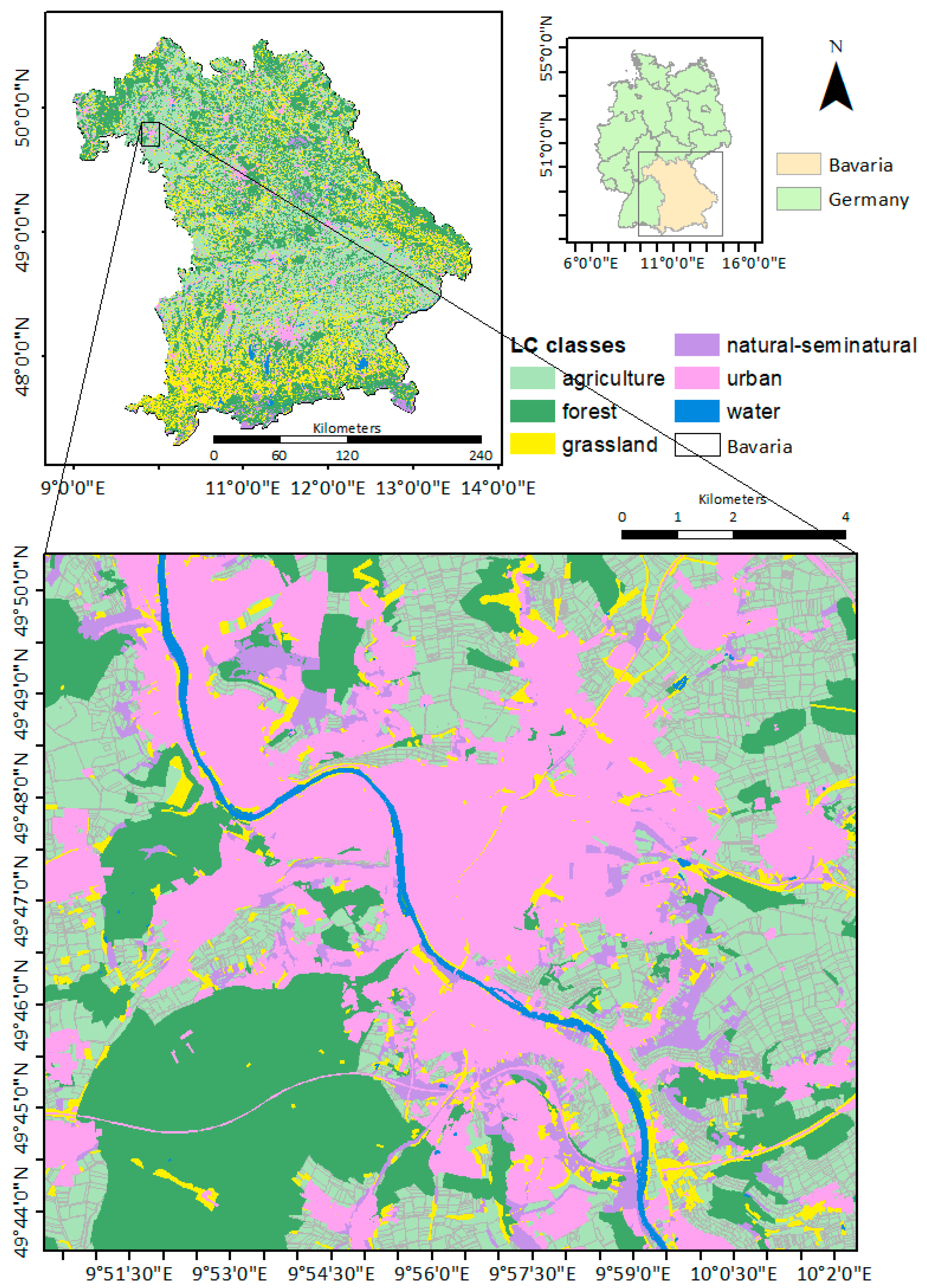
2.1. Study Area
2.2. Data
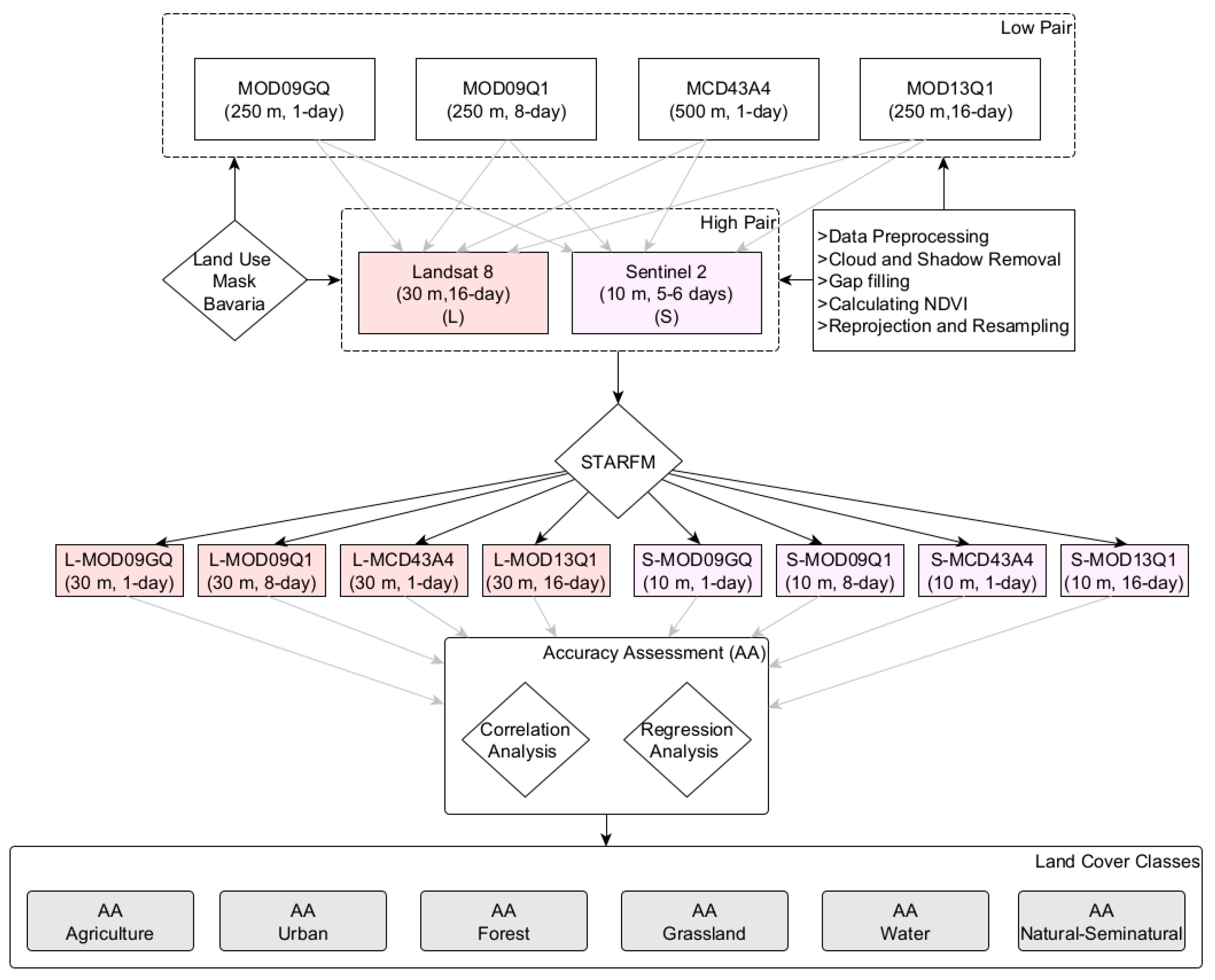
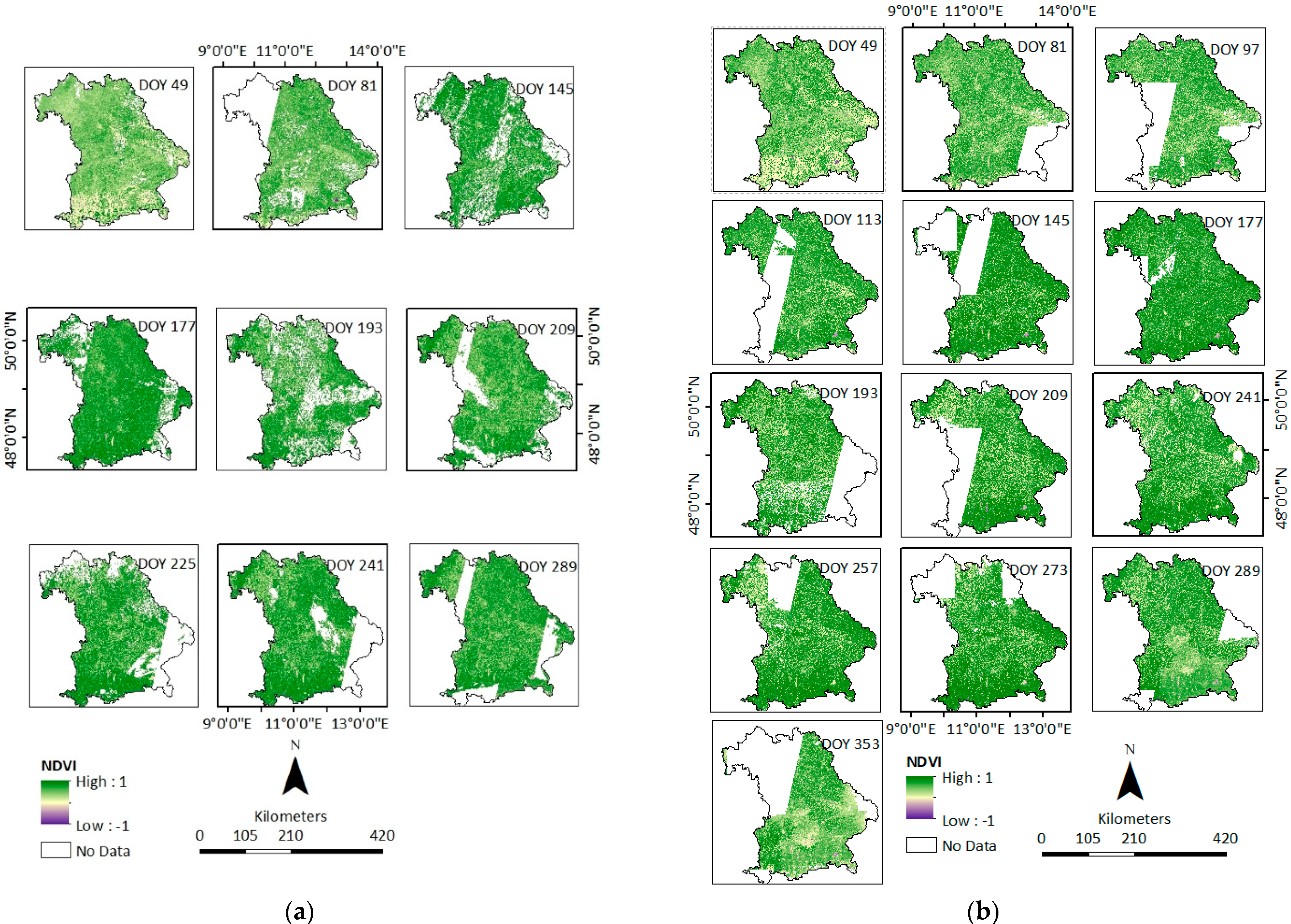
2.2.1. Satellite Data
High Spatial Resolution NDVI Products: High Pairs
Low Spatial Resolution NDVI Products: Low Pairs
2.2.2. LC Map of Bavaria 2019
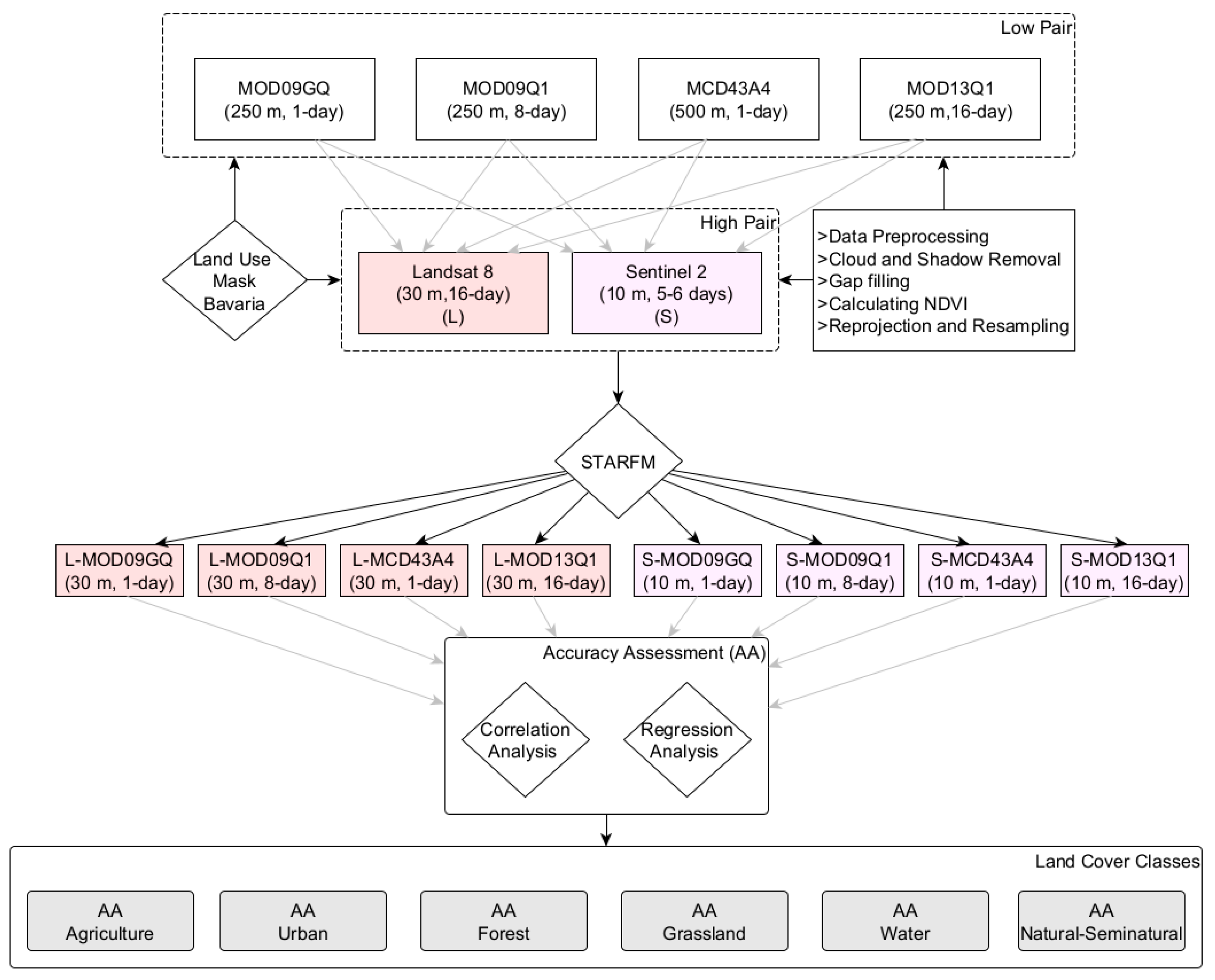
2.3. Method
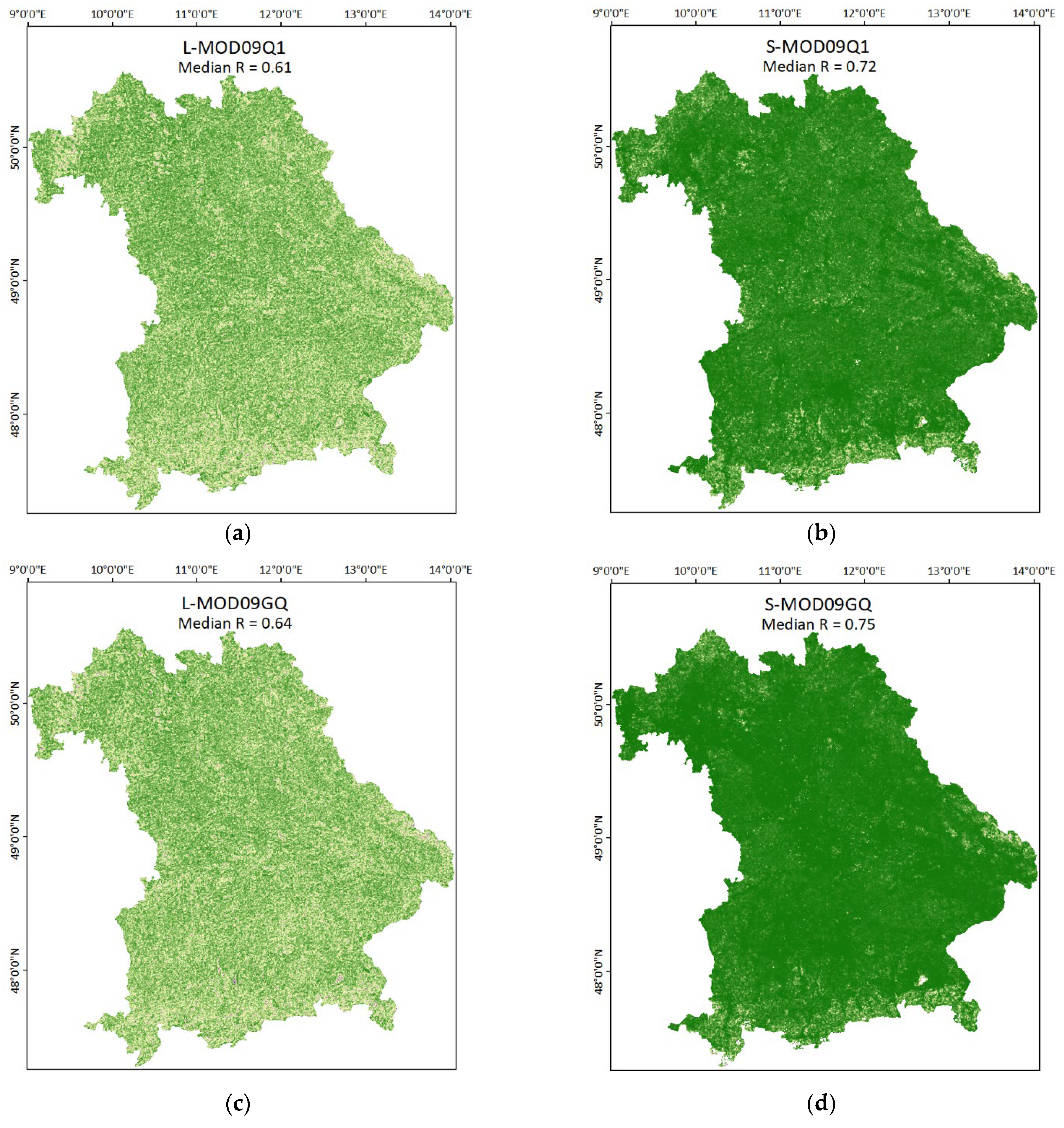
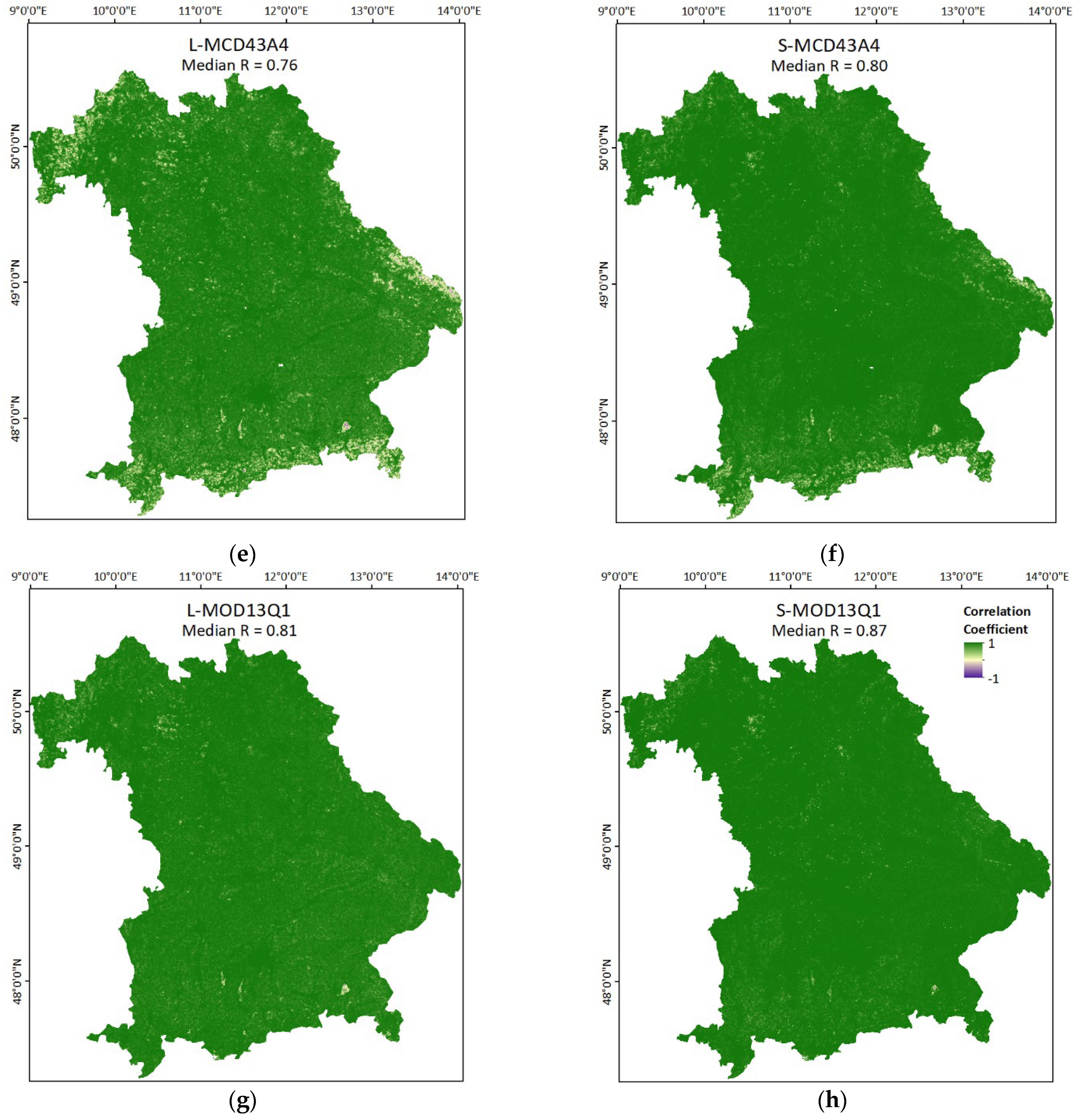
2.3.1. Correlations between Reference and Synthetic NDVI Time Series
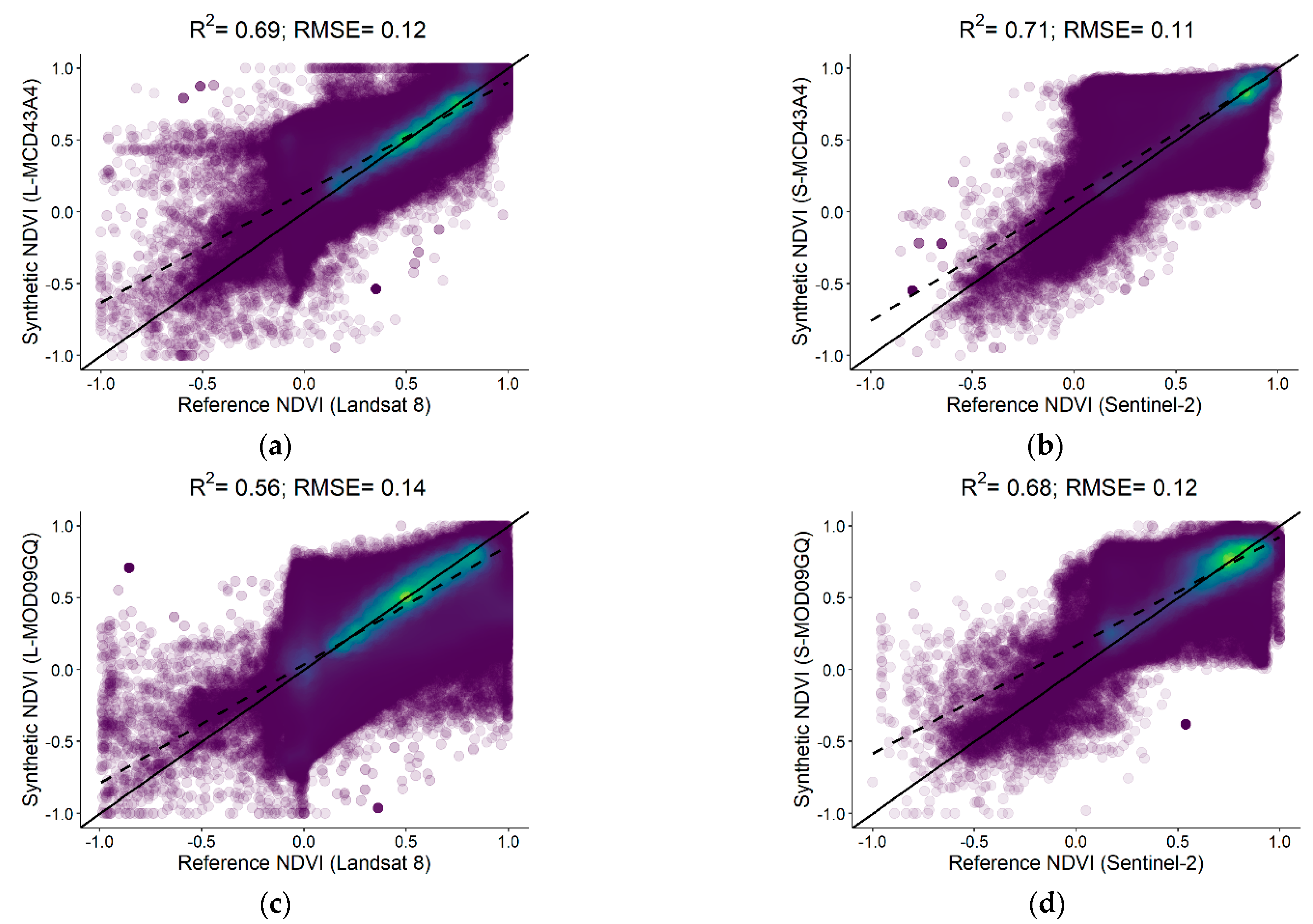
2.3.2. Regression Analysis between Reference and Synthetic NDVI Time Series
3. Results
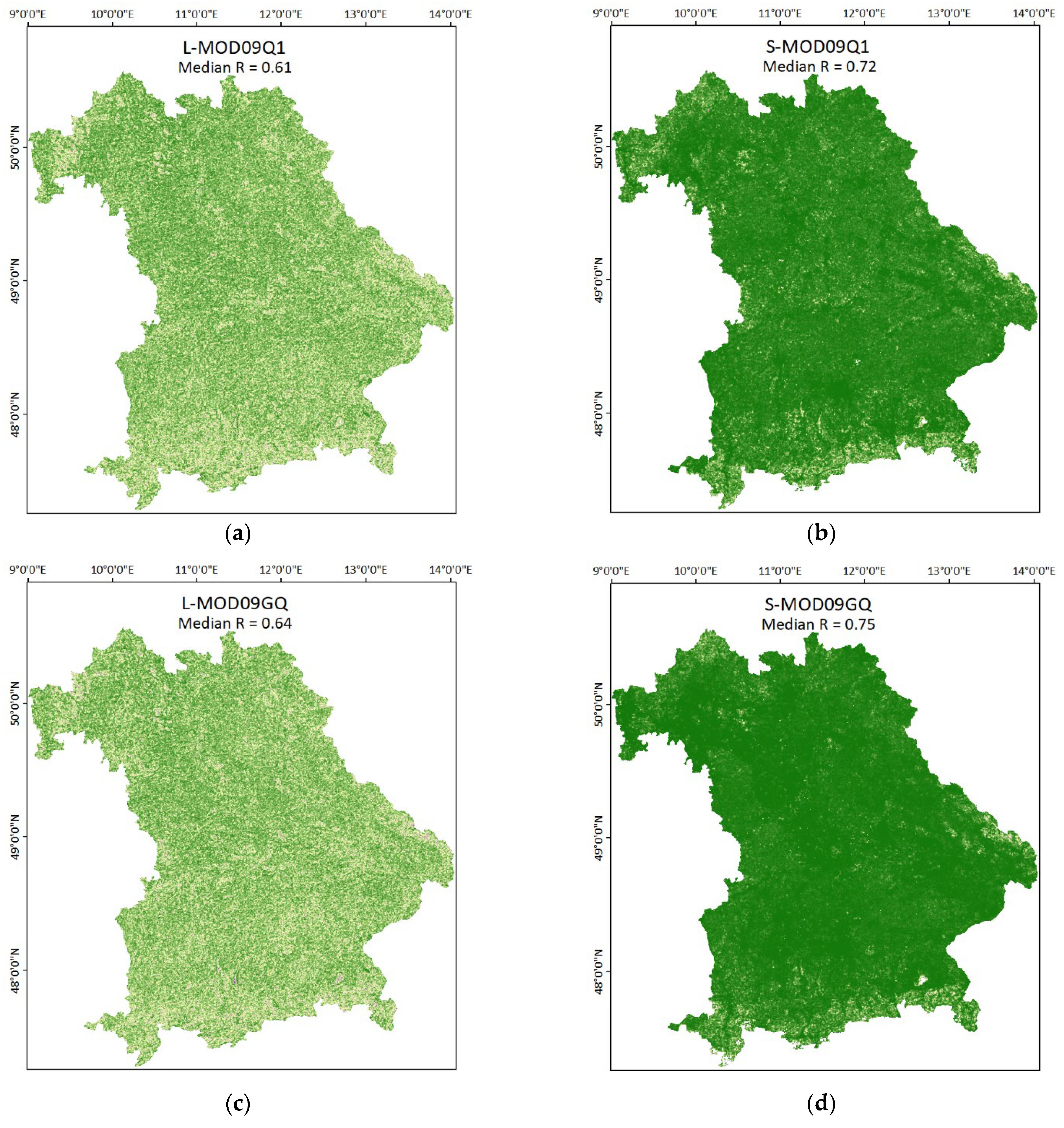
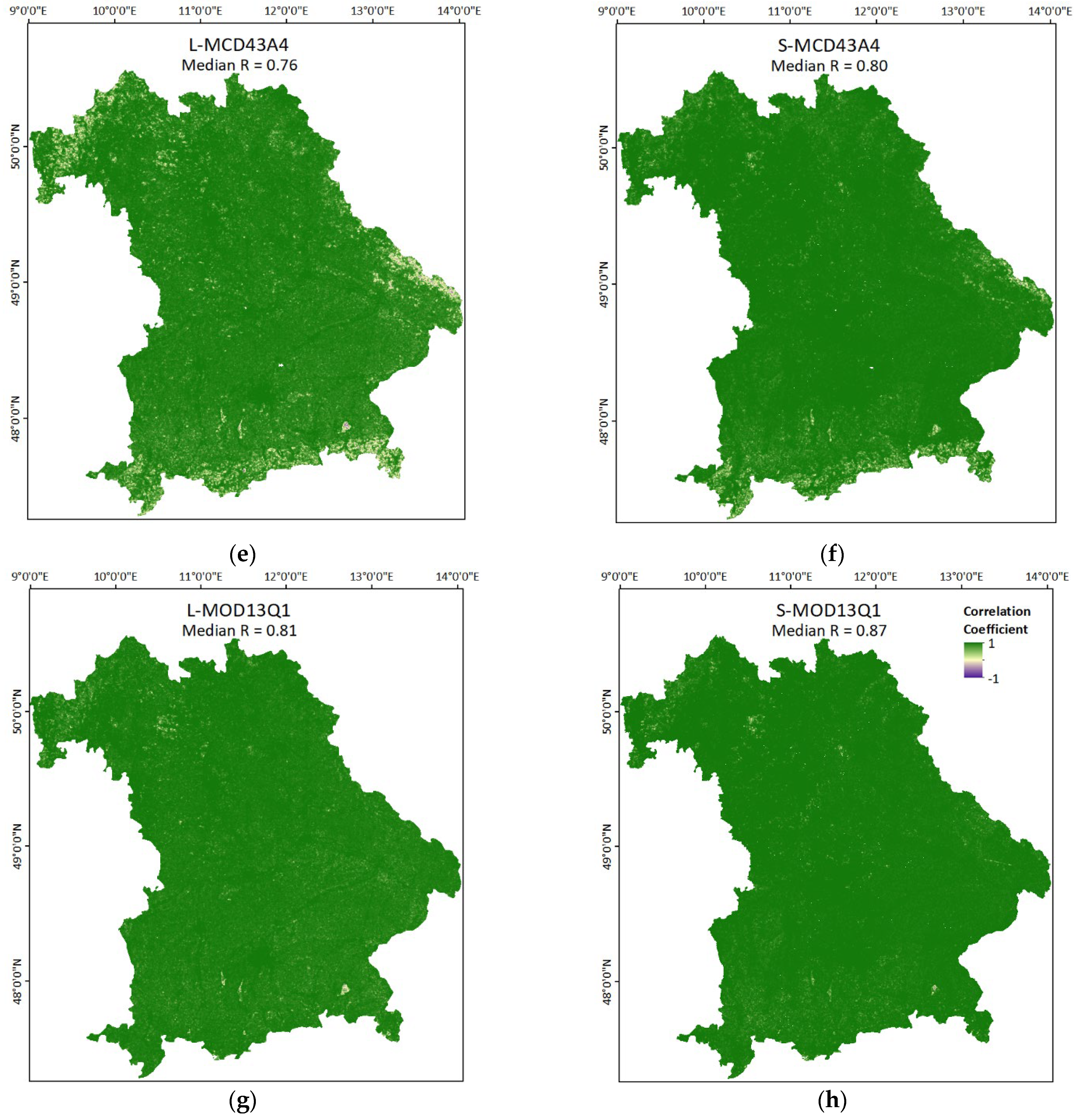
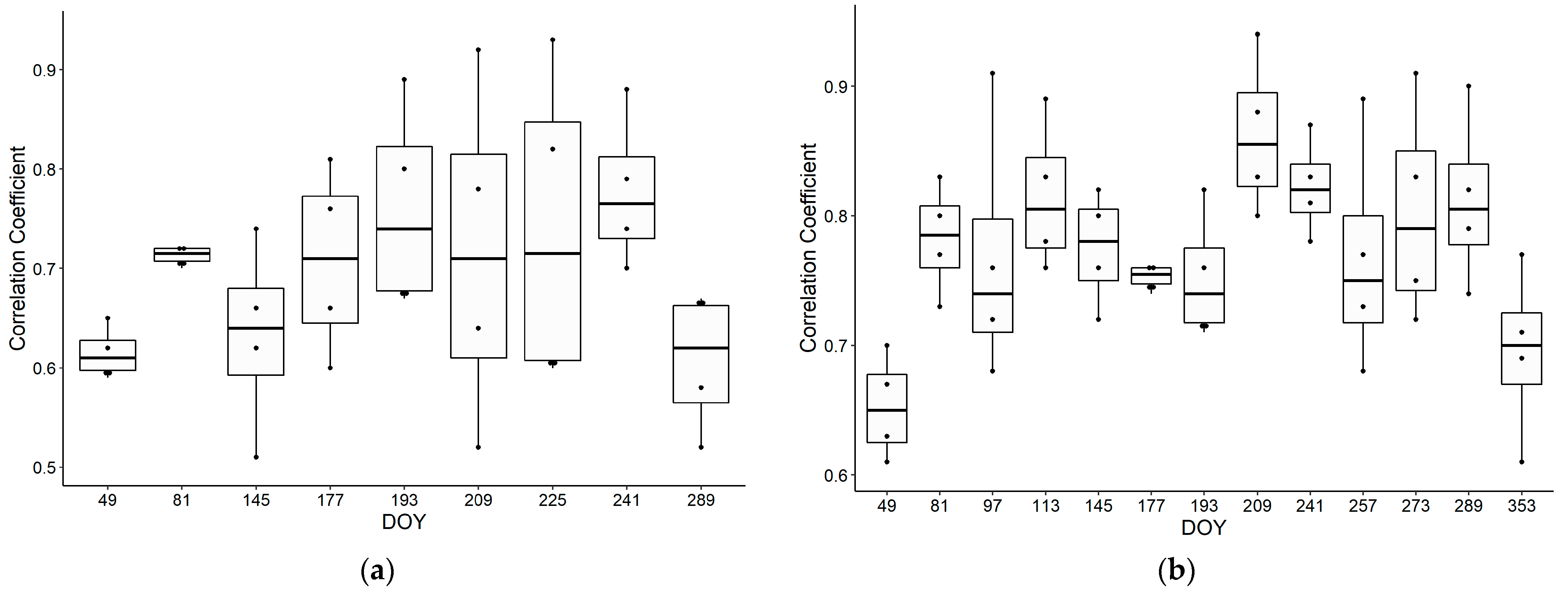
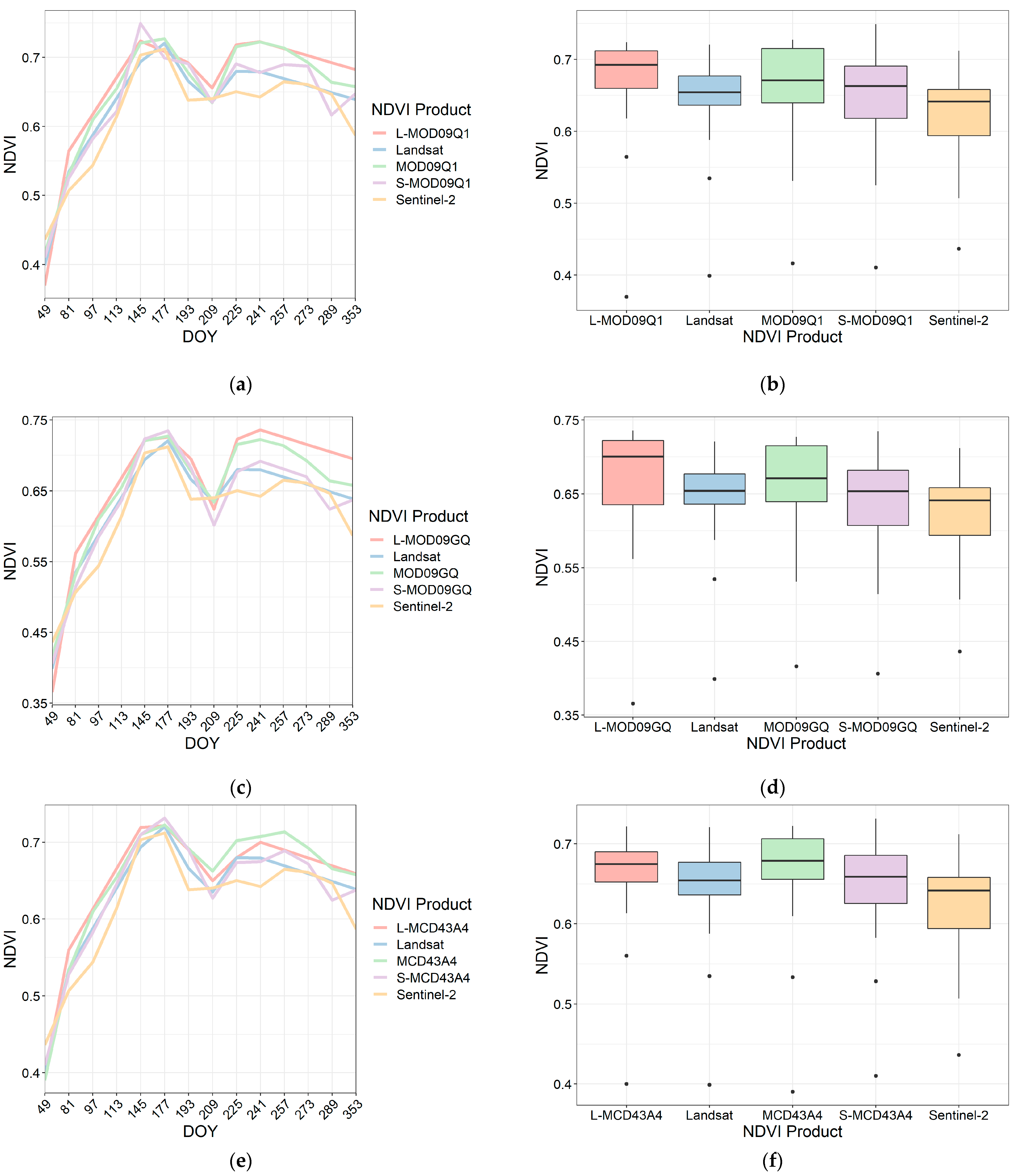
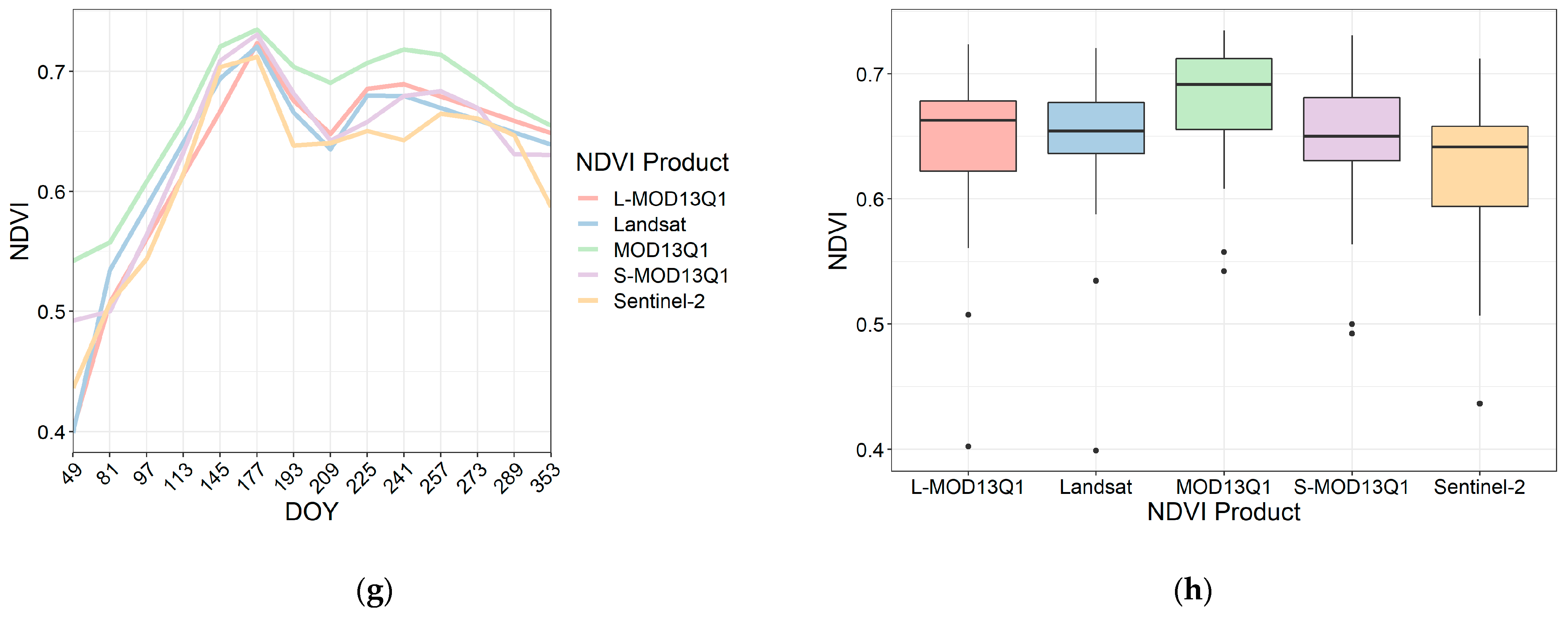
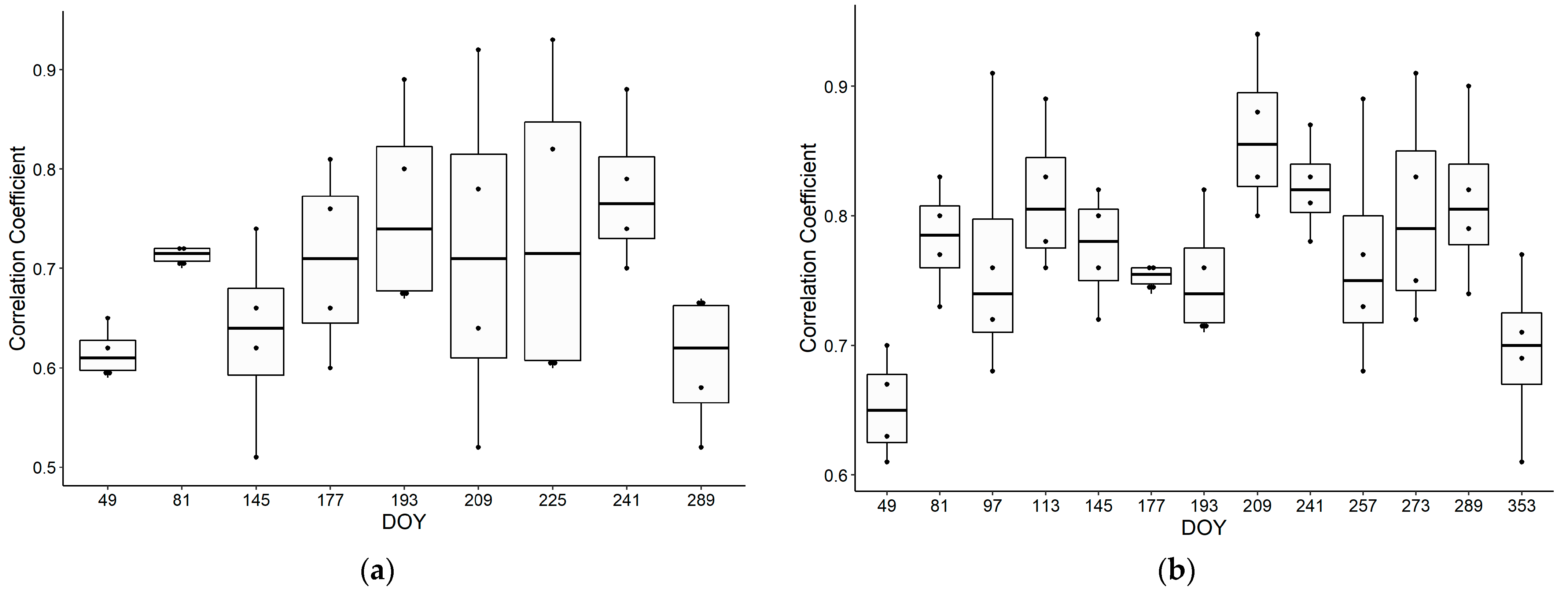
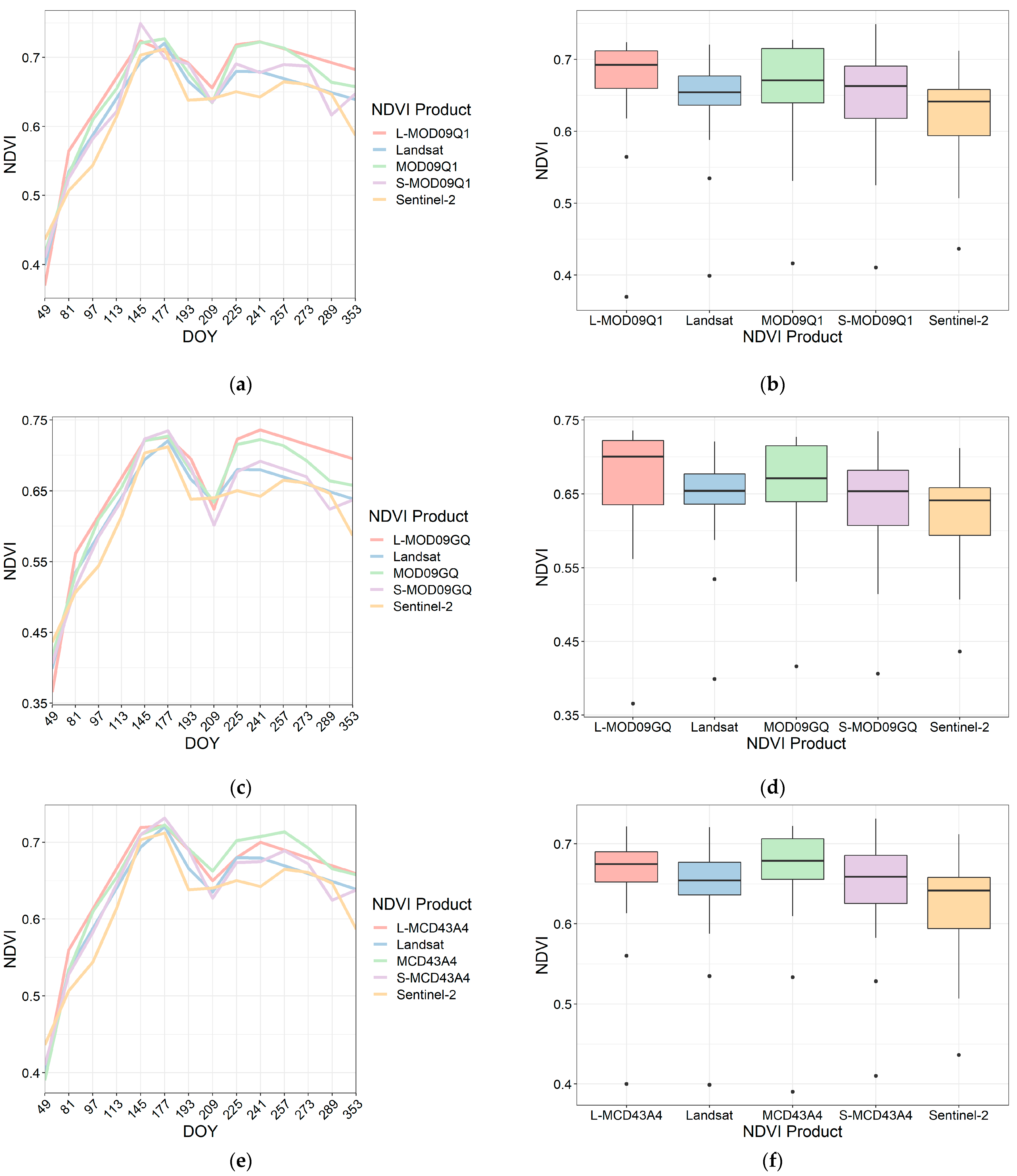
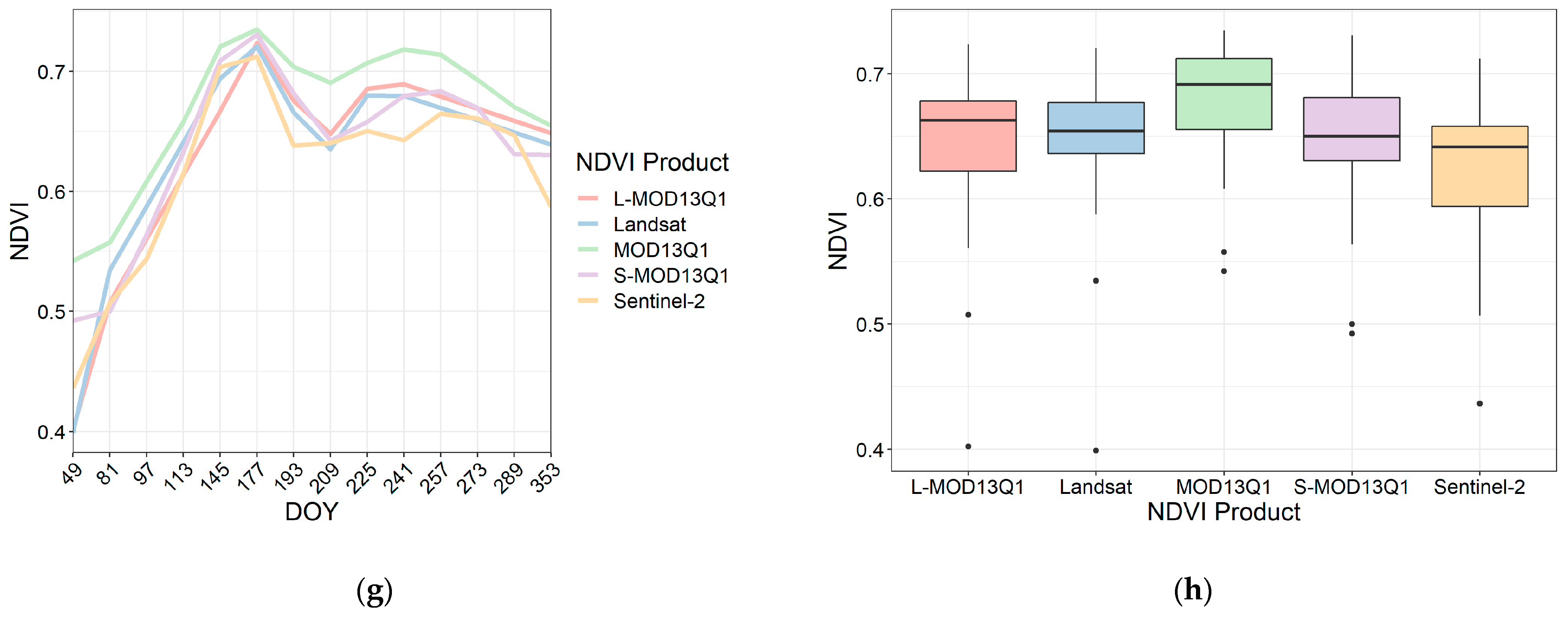
3.1. Correlations between Reference and Synthetic NDVI Time Series of Landsat and Sentinel-2
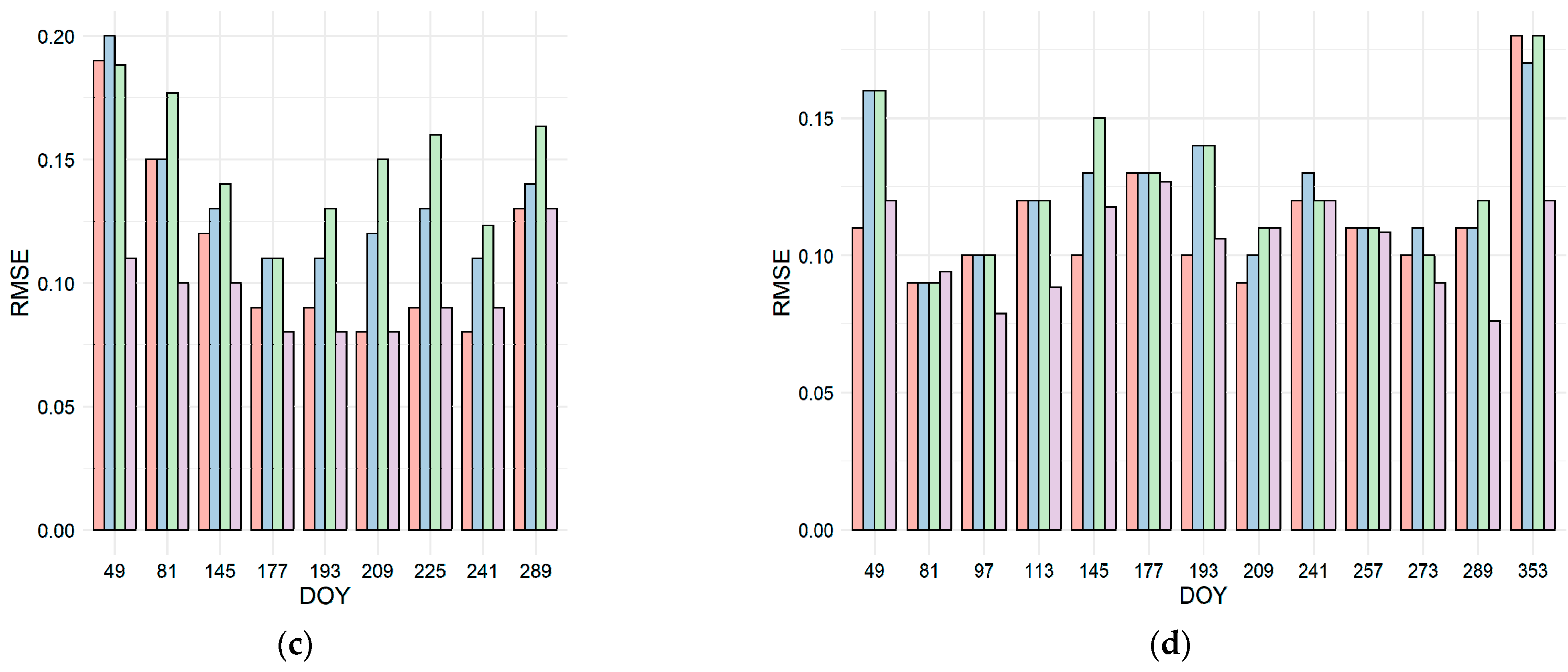
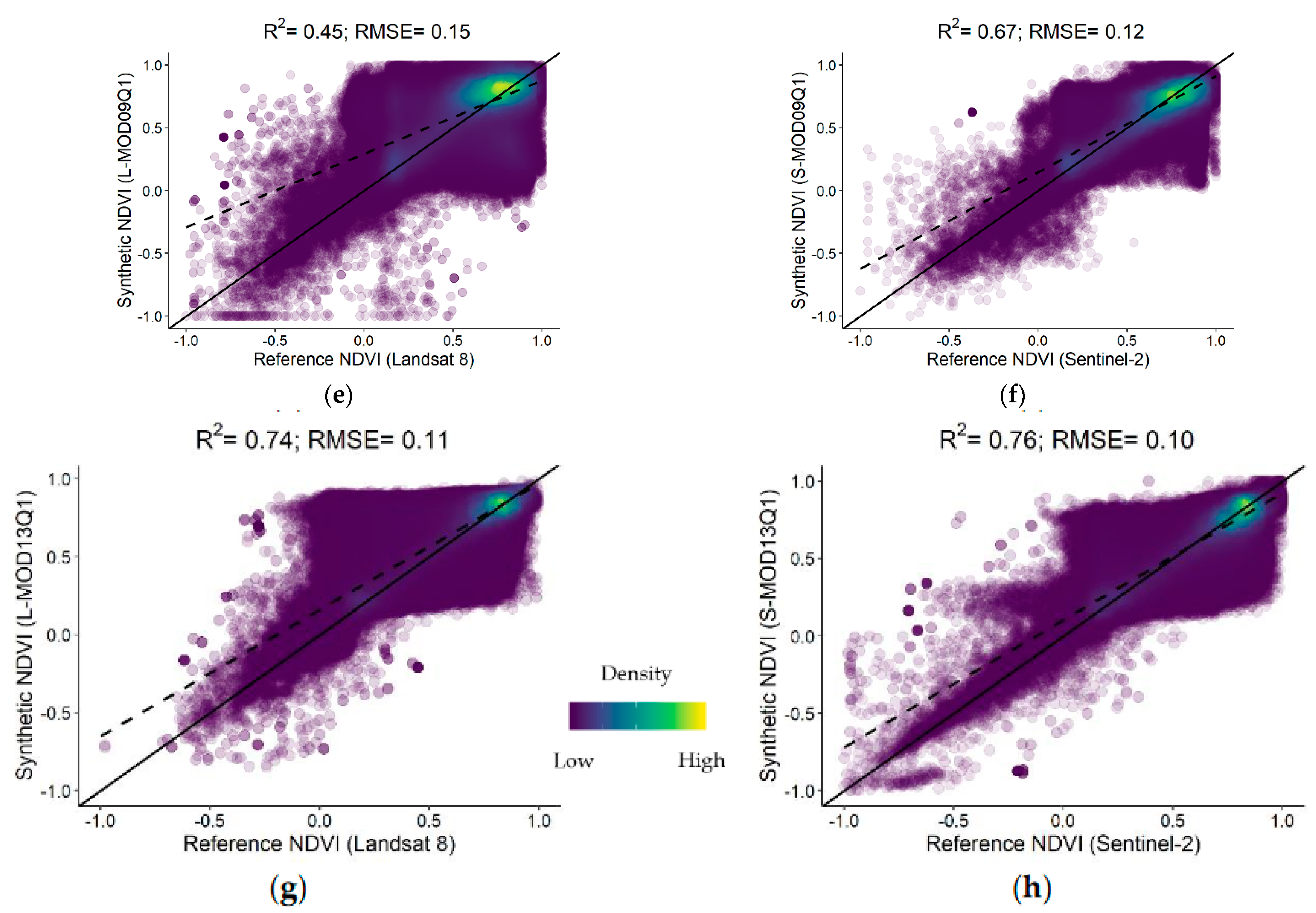
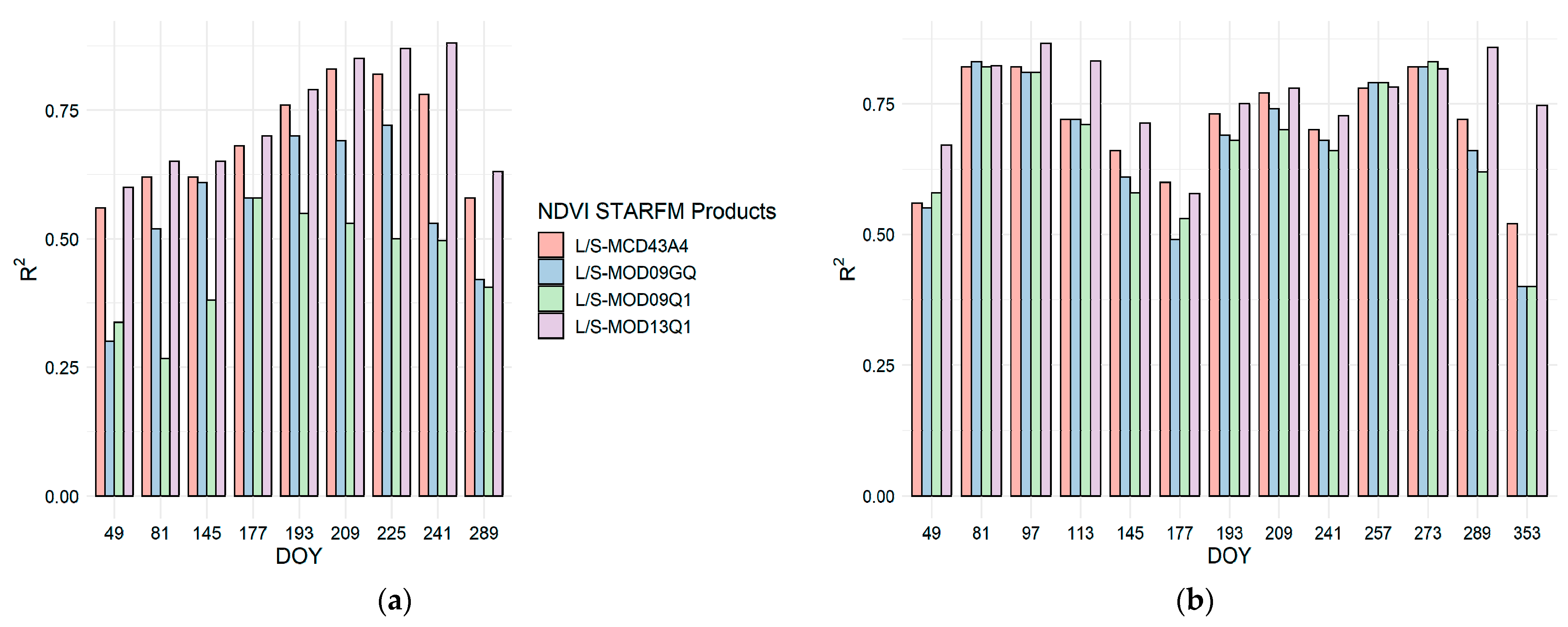
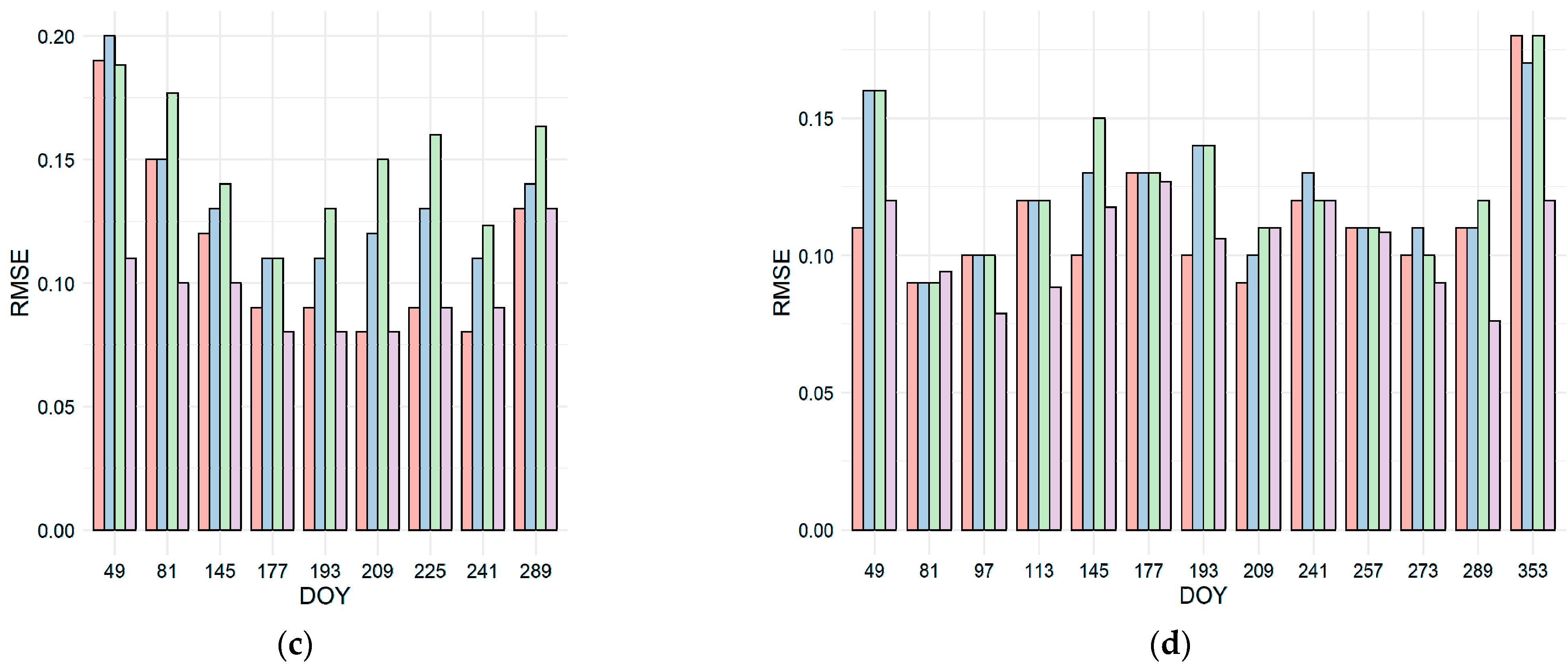
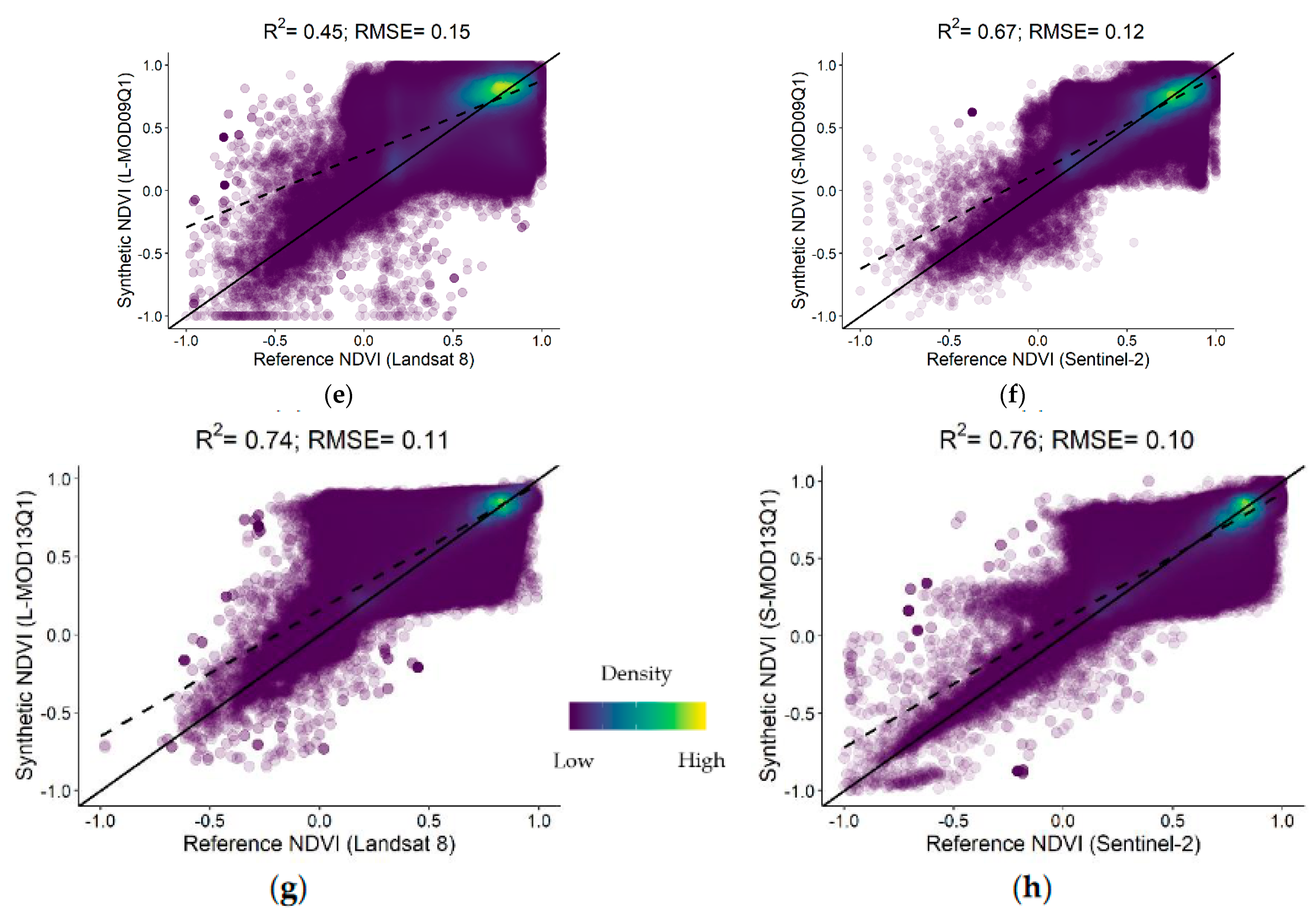
3.2. Statistical Analysis between Reference and Synthetic NDVI Time Series of Landsat and Sentinel-2
3.3. Statistical Analysis between Reference and Synthetic NDVI Time Series of Landsat and Sentinel-2 Based on Land Use Classes
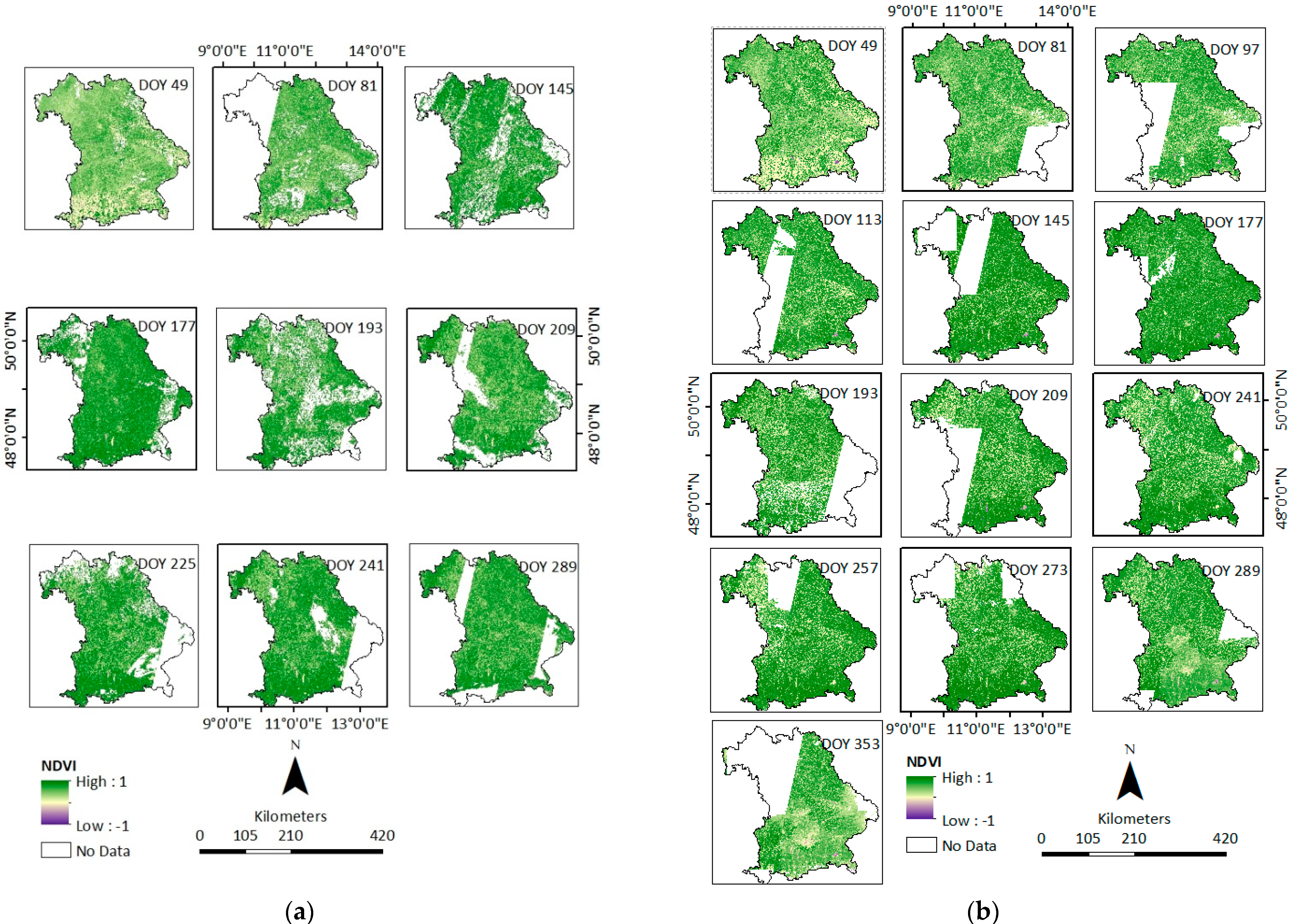
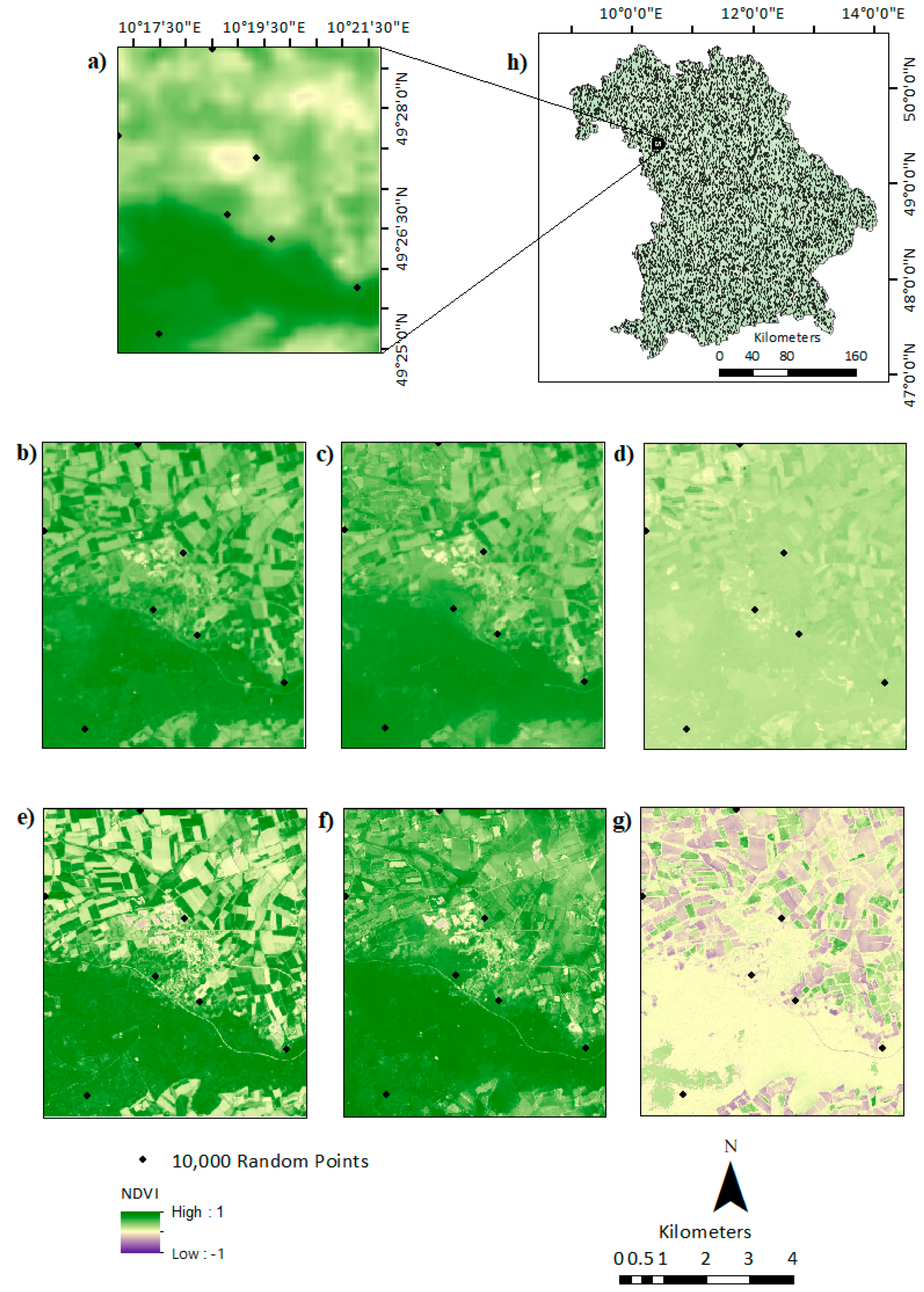
3.4. Visualization of Resulted Synthetic Products Obtained from Different MODIS Imageries
4. Discussion
4.1. Quality Assessment of Data Fusion
4.2. Quality Assessment of Data Fusion based on Different Land Use Classes
4.3. Visualization of the NDVI Synthetic Products
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dubovik, O.; Schuster, G.L.; Xu, F.; Hu, Y.; Bösch, H.; Landgraf, J.; Li, Z. Grand Challenges in Satellite Remote Sensing. Front. Remote Sens. 2021, 2, 619818. [Google Scholar] [CrossRef]
- Dhillon, M.S.; Dahms, T.; Kuebert-Flock, C.; Borg, E.; Conrad, C.; Ullmann, T. Modelling Crop Biomass from Synthetic Remote Sensing Time Series: Example for the DEMMIN Test Site, Germany. Remote Sens. 2020, 12, 1819. [Google Scholar] [CrossRef]
- Roy, D.P.; Ju, J.; Lewis, P.; Schaaf, C.; Gao, F.; Hansen, M.; Lindquist, E. Multi-temporal MODIS–Landsat data fusion for relative radiometric normalization, gap filling, and prediction of Landsat data. Remote Sens. Environ. 2008, 112, 3112–3130. [Google Scholar] [CrossRef]
- Gevaert, C.M.; García-Haro, F.J. A comparison of STARFM and an unmixing-based algorithm for Landsat and MODIS data fusion. Remote Sens. Environ. 2015, 156, 34–44. [Google Scholar] [CrossRef]
- Bhandari, S.; Phinn, S.; Gill, T. Preparing Landsat Image Time Series (LITS) for Monitoring Changes in Vegetation Phenology in Queensland, Australia. Remote Sens. 2012, 4, 1856–1886. [Google Scholar] [CrossRef] [Green Version]
- Arai, E.; Shimabukuro, Y.E.; Pereira, G.; Vijaykumar, N.L. A Multi-Resolution Multi-Temporal Technique for Detecting and Mapping Deforestation in the Brazilian Amazon Rainforest. Remote Sens. 2011, 3, 1943–1956. [Google Scholar] [CrossRef] [Green Version]
- Dariane, A.B.; Khoramian, A.; Santi, E. Investigating spatiotemporal snow cover variability via cloud-free MODIS snow cover product in Central Alborz Region. Remote Sens. Environ. 2017, 202, 152–165. [Google Scholar] [CrossRef]
- Dong, C.; Menzel, L. Improving the accuracy of MODIS 8-day snow products with in situ temperature and precipitation data. J. Hydrol. 2016, 534, 466–477. [Google Scholar] [CrossRef]
- Parajka, J.; Bloschl, G. Spatio-temporal combination of MODIS images—Potential for snow cover mapping. Water Resour. Res. 2008, 44. [Google Scholar] [CrossRef]
- Gao, F.; Masek, J.; Schwaller, M.; Hall, F. On the blending of the Landsat and MODIS surface reflectance: Predicting daily Landsat surface reflectance. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2207–2218. [Google Scholar] [CrossRef]
- Xie, D.; Zhang, J.; Zhu, X.; Pan, Y.; Liu, H.; Yuan, Z.; Yun, Y. An Improved STARFM with Help of an Unmixing-Based Method to Generate High Spatial and Temporal Resolution Remote Sensing Data in Complex Heterogeneous Regions. Sensors 2016, 16, 207. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cui, J.; Zhang, X.; Luo, M. Combining Linear Pixel Unmixing and STARFM for Spatiotemporal Fusion of Gaofen-1 Wide Field of View Imagery and MODIS Imagery. Remote Sens. 2018, 10, 1047. [Google Scholar] [CrossRef] [Green Version]
- Lee, M.H.; Cheon, E.J.; Eo, Y.D. Cloud Detection and Restoration of Landsat-8 using STARFM. Korean J. Remote Sens. 2019, 35, 861–871. [Google Scholar] [CrossRef]
- Zhu, L.; Radeloff, V.C.; Ives, A.R. Improving the mapping of crop types in the Midwestern U.S. by fusing Landsat and MODIS satellite data. Int. J. Appl. Earth Obs. Geoinf. 2017, 58, 1–11. [Google Scholar] [CrossRef]
- Zhang, J. Multi-source remote sensing data fusion: Status and trends. Int. J. Image Data Fusion 2010, 1, 5–24. [Google Scholar] [CrossRef] [Green Version]
- Belgiu, M.; Stein, A. Spatiotemporal Image Fusion in Remote Sensing. Remote Sens. 2019, 11, 818. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.; Chen, J.; Gao, F.; Chen, X.; Masek, J.G. An enhanced spatial and temporal adaptive reflectance fusion model for complex heterogeneous regions. Remote Sens. Environ. 2010, 114, 2610–2623. [Google Scholar] [CrossRef]
- Olexa, E.M.; Lawrence, R.L. Performance and effects of land cover type on synthetic surface reflectance data and NDVI estimates for assessment and monitoring of semi-arid rangeland. Int. J. Appl. Earth Obs. Geoinf. 2014, 30, 30–41. [Google Scholar] [CrossRef]
- Wu, M.; Niu, Z.; Wang, C.; Wu, C.; Wang, L. Use of MODIS and Landsat time series data to generate high-resolution temporal synthetic Landsat data using a spatial and temporal reflectance fusion model. J. Appl. Remote Sens. 2012, 6, 63507. [Google Scholar] [CrossRef]
- Hilker, T.; Wulder, M.A.; Coops, N.C.; Linke, J.; McDermid, G.; Masek, J.G.; Gao, F.; White, J.C. A new data fusion model for high spatial- and temporal-resolution mapping of forest disturbance based on Landsat and MODIS. Remote Sens. Environ. 2009, 113, 1613–1627. [Google Scholar] [CrossRef]
- Huang, B.; Song, H. Spatiotemporal Reflectance Fusion via Sparse Representation. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3707–3716. [Google Scholar] [CrossRef]
- Luo, Y.; Guan, K.; Peng, J. STAIR: A generic and fully-automated method to fuse multiple sources of optical satellite data to generate a high-resolution, daily and cloud-/gap-free surface reflectance product. Remote Sens. Environ. 2018, 214, 87–99. [Google Scholar] [CrossRef]
- Emelyanova, I.V.; McVicar, T.R.; Van Niel, T.G.; Li, L.T.; van Dijk, A.I.J.M. Assessing the accuracy of blending Landsat–MODIS surface reflectances in two landscapes with contrasting spatial and temporal dynamics: A framework for algorithm selection. Remote Sens. Environ. 2013, 133, 193–209. [Google Scholar] [CrossRef]
- Zhu, X.; Cai, F.; Tian, J.; Williams, T.K.-A. Spatiotemporal Fusion of Multisource Remote Sensing Data: Literature Survey, Taxonomy, Principles, Applications, and Future Directions. Remote Sens. 2018, 10, 527. [Google Scholar] [CrossRef] [Green Version]
- Htitiou, A.; Boudhar, A.; Benabdelouahab, T. Deep Learning-Based Spatiotemporal Fusion Approach for Producing High-Resolution NDVI Time-Series Datasets. Can. J. Remote Sens. 2021, 47, 182–197. [Google Scholar] [CrossRef]
- Chen, X.; Liu, M.; Zhu, X.; Chen, J.; Zhong, Y.; Cao, X. “Blend-then-Index” or “Index-then-Blend”: A Theoretical Analysis for Generating High-resolution NDVI Time Series by STARFM. Photogramm. Eng. Remote Sens. 2018, 84, 65–73. [Google Scholar] [CrossRef]
- Jarihani, A.A.; McVicar, T.; Van Niel, T.G.; Emelyanova, I.; Callow, J.; Johansen, K. Blending Landsat and MODIS Data to Generate Multispectral Indices: A Comparison of “Index-then-Blend” and “Blend-then-Index” Approaches. Remote Sens. 2014, 6, 9213–9238. [Google Scholar] [CrossRef] [Green Version]
- Rao, Y.; Zhu, X.; Chen, J.; Wang, J. An Improved Method for Producing High Spatial-Resolution NDVI Time Series Datasets with Multi-Temporal MODIS NDVI Data and Landsat TM/ETM+ Images. Remote Sens. 2015, 7, 7865–7891. [Google Scholar] [CrossRef] [Green Version]
- Liao, C.; Wang, J.; Pritchard, I.; Liu, J.; Shang, J. A Spatio-Temporal Data Fusion Model for Generating NDVI Time Series in Heterogeneous Regions. Remote Sens. 2017, 9, 1125. [Google Scholar] [CrossRef] [Green Version]
- Qiu, Y.; Zhou, J.; Chen, J.; Chen, X. Spatiotemporal fusion method to simultaneously generate full-length normalized difference vegetation index time series (SSFIT). Int. J. Appl. Earth Obs. Geoinf. 2021, 100, 102333. [Google Scholar] [CrossRef]
- Kloos, S.; Yuan, Y.; Castelli, M.; Menzel, A. Agricultural Drought Detection with MODIS Based Vegetation Health Indices in Southeast Germany. Remote Sens. 2021, 13, 3907. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Kuebert, C. Fernerkundung für das Phänologiemonitoring: Optimierung und Analyse des Ergrünungsbeginns mittels MODIS-Zeitreihen für Deutschland; University of Wuerzburg: Würzburg, Germany, 2018. [Google Scholar]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W.; Harlan, J.C. Monitoring the Vernal Advancement and Retrogradation (Green Wave Effect) of Natural Vegetation; NASA/GSFC Type III Final Report; Texas A&M University: College Station, TX, USA, 1974. [Google Scholar]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Hwang, T.; Song, C.; Bolstad, P.V.; Band, L.E. Downscaling real-time vegetation dynamics by fusing multi-temporal MODIS and Landsat NDVI in topographically complex terrain. Remote Sens. Environ. 2011, 115, 2499–2512. [Google Scholar] [CrossRef]
- Walker, J.J.; De Beurs, K.M.; Wynne, R.H.; Gao, F. Evaluation of Landsat and MODIS data fusion products for analysis of dryland forest phenology. Remote Sens. Environ. 2012, 117, 381–393. [Google Scholar] [CrossRef]
- Htitiou, A.; Boudhar, A.; Lebrini, Y.; Hadria, R.; Lionboui, H.; Elmansouri, L.; Tychon, B.; Benabdelouahab, T. The Performance of Random Forest Classification Based on Phenological Metrics Derived from Sentinel-2 and Landsat 8 to Map Crop Cover in an Irrigated Semi-arid Region. Remote Sens. Earth Syst. Sci. 2019, 2, 208–224. [Google Scholar] [CrossRef]
- Benabdelouahab, T.; Lebrini, Y.; Boudhar, A.; Hadria, R.; Htitiou, A.; Lionboui, H. Monitoring spatial variability and trends of wheat grain yield over the main cereal regions in Morocco: A remote-based tool for planning and adjusting policies. Geocarto Int. 2019, 36, 2303–2322. [Google Scholar] [CrossRef]
- Lebrini, Y.; Boudhar, A.; Htitiou, A.; Hadria, R.; Lionboui, H.; Bounoua, L.; Benabdelouahab, T. Remote monitoring of agricultural systems using NDVI time series and machine learning methods: A tool for an adaptive agricultural policy. Arab. J. Geosci. 2020, 13, 1–14. [Google Scholar] [CrossRef]
- Xin, Q.; Olofsson, P.; Zhu, Z.; Tan, B.; Woodcock, C.E. Toward near real-time monitoring of forest disturbance by fusion of MODIS and Landsat data. Remote Sens. Environ. 2013, 135, 234–247. [Google Scholar] [CrossRef]
- Anderson, M.C.; Kustas, W.P.; Norman, J.M.; Hain, C.R.; Mecikalski, J.R.; Schultz, L.; González-Dugo, M.P.; Cammalleri, C.; D’Urso, G.; Pimstein, A.; et al. Mapping daily evapotranspiration at field to continental scales using geostationary and polar orbiting satellite imagery. Hydrol. Earth Syst. Sci. 2011, 15, 223–239. [Google Scholar] [CrossRef] [Green Version]
- Gao, F.; Anderson, M.C.; Kustas, W.P.; Wang, Y. Simple method for retrieving leaf area index from Landsat using MODIS leaf area index products as reference. J. Appl. Remote Sens. 2012, 6, 063554. [Google Scholar] [CrossRef]
- Singh, D. Generation and evaluation of gross primary productivity using Landsat data through blending with MODIS data. Int. J. Appl. Earth Obs. Geoinf. 2011, 13, 59–69. [Google Scholar] [CrossRef]
- Dong, T.; Liu, J.; Qian, B.; Zhao, T.; Jing, Q.; Geng, X.; Wang, J.; Huffman, T.; Shang, J. Estimating winter wheat biomass by assimilating leaf area index derived from fusion of Landsat-8 and MODIS data. Int. J. Appl. Earth Obs. Geoinf. 2016, 49, 63–74. [Google Scholar] [CrossRef]
- Quintano, C.; Fernández-Manso, A.; Fernández-Manso, O. Combination of Landsat and Sentinel-2 MSI data for initial assessing of burn severity. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 221–225. [Google Scholar] [CrossRef]
- Pahlevan, N.; Chittimalli, S.K.; Balasubramanian, S.V.; Vellucci, V. Sentinel-2/Landsat-8 product consistency and implications for monitoring aquatic systems. Remote Sens. Environ. 2019, 220, 19–29. [Google Scholar] [CrossRef]
- Moon, M.; Richardson, A.D.; Friedl, M.A. Multiscale assessment of land surface phenology from harmonized Landsat 8 and Sentinel-2, PlanetScope, and PhenoCam imagery. Remote Sens. Environ. 2021, 266, 112716. [Google Scholar] [CrossRef]
- Zhang, Y.; Ling, F.; Wang, X.; Foody, G.M.; Boyd, D.S.; Li, X.; Du, Y.; Atkinson, P.M. Tracking small-scale tropical forest disturbances: Fusing the Landsat and Sentinel-2 data record. Remote Sens. Environ. 2021, 261, 112470. [Google Scholar] [CrossRef]
- Claverie, M.; Ju, J.; Masek, J.G.; Dungan, J.L.; Vermote, E.F.; Roger, J.-C.; Skakun, S.V.; Justice, C. The Harmonized Landsat and Sentinel-2 surface reflectance data set. Remote Sens. Environ. 2018, 219, 145–161. [Google Scholar] [CrossRef]
- Bolton, D.K.; Gray, J.; Melaas, E.K.; Moon, M.; Eklundh, L.; Friedl, M.A. Continental-scale land surface phenology from harmonized Landsat 8 and Sentinel-2 imagery. Remote Sens. Environ. 2020, 240, 111685. [Google Scholar] [CrossRef]
- Lunetta, R.S.; Lyon, J.G.; Guindon, B.; Elvidge, C.D. North American landscape characterization dataset development and data fusion issues. Photogramm. Eng. Remote Sens. 1998, 64, 821–828. [Google Scholar]
- Pohl, C.; van Genderen, J. Multisensor image fusion in remote sensing: Concepts, methods and applications. Int. J. Remote Sens. 1998, 19, 823–854. [Google Scholar] [CrossRef] [Green Version]
- Gao, F.; Morisette, J.T.; Wolfe, R.E.; Ederer, G.; Pedelty, J.; Masuoka, E.; Myneni, R.; Tan, B.; Nightingale, J. An Algorithm to Produce Temporally and Spatially Continuous MODIS-LAI Time Series. IEEE Geosci. Remote Sens. Lett. 2008, 5, 60–64. [Google Scholar] [CrossRef]
- Borak, J.S.; Jasiński, M.F. Effective interpolation of incomplete satellite-derived leaf-area index time series for the continental United States. Agric. For. Meteorol. 2009, 149, 320–332. [Google Scholar] [CrossRef] [Green Version]
- Kandasamy, S.; Baret, F.; Verger, A.; Neveux, P.; Weiss, M. A comparison of methods for smoothing and gap filling time series of remote sensing observations—Application to MODIS LAI products. Biogeosciences 2013, 10, 4055–4071. [Google Scholar] [CrossRef] [Green Version]
- Verger, A.; Baret, F.; Weiss, M. A multisensor fusion approach to improve LAI time series. Remote Sens. Environ. 2011, 115, 2460–2470. [Google Scholar] [CrossRef] [Green Version]
- Robinson, N.P.; Allred, B.W.; Jones, M.O.; Moreno, A.; Kimball, J.S.; Naugle, D.E.; Erickson, T.A.; Richardson, A.D. A Dynamic Landsat Derived Normalized Difference Vegetation Index (NDVI) Product for the Conterminous United States. Remote Sens. 2017, 9, 863. [Google Scholar] [CrossRef] [Green Version]
- Didan, K.; Munoz, A.B.; Solano, R.; Huete, A. MODIS Vegetation Index User’s Guide (MOD13 Series); Vegetation Index and Phenology Lab, University of Arizona: Tucson, AZ, USA, 2015. [Google Scholar]
- Solano, R.; Didan, K.; Jacobson, A.; Huete, A. MODIS Vegetation Index User’s Guide (MOD13 Series); Terrestrial Biophysics and Remote Sensing Lab, University of Arizona: Tucson, AZ, USA, 2010. [Google Scholar]
- Chen, B.; Ge, Q.; Fu, D.; Yu, G.; Sun, X.; Wang, S.; Wang, H. A data-model fusion approach for upscaling gross ecosystem productivity to the landscape scale based on remote sensing and flux footprint modelling. Biogeosciences 2010, 7, 2943–2958. [Google Scholar] [CrossRef] [Green Version]
- Thorsten, D.; Christopher, C.; Babu, D.K.; Marco, S.; Erik, B. Derivation of biophysical parameters from fused remote sensing data. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 4374–4377. [Google Scholar] [CrossRef]
- Gao, B.-C. NDWI—A normalized difference water index for remote sensing of vegetation liquid water from space. Remote Sens. Environ. 1996, 58, 257–266. [Google Scholar] [CrossRef]
- Zha, Y.; Gao, J.; Ni, S. Use of normalized difference built-up index in automatically mapping urban areas from TM imagery. Int. J. Remote Sens. 2003, 24, 583–594. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data | Product Name | Resolution Spatial-Temporal | References | |
|---|---|---|---|---|
| Satellite data | Sentinel | Sentinel-2 | 10 m 5–6 days | www.corpenicus.eu (accessed on 21 June 2021) |
| Landsat | Landsat 8 | 30 m 16 days | www.usgs.gov (accessed on 21 June 2021) | |
| MODIS | MOD09GQ | 250 m 1 day | www.lpdaac.usgs.gov (accessed on 21 June 2021) | |
| MOD09Q1 | 250 m 8 days | www.lpdaac.usgs.gov (accessed on 21 June 2021) | ||
| MCD43A4 | 500 m 1 day | www.lpdaac.usgs.gov (accessed on 21 June 2021) | ||
| MOD13Q1 | 250 m 16 days | www.lpdaac.usgs.gov (accessed on 21 June 2021) | ||
| Vector data | Land Cover (LC) | LC Map of Bavaria | 2019 | www.landklif.biozentrum.uni-wuerzburg.de (accessed on 21 June 2021) |
| NDVI Product | LC Class | DOY | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 49 | 81 | 145 | 177 | 193 | 209 | 225 | 241 | 289 | Mean R2 | Mean RMSE | |||
| L-MOD13Q1 | Agriculture | 0.41 | 0.49 | 0.66 | 0.65 | 0.62 | 0.79 | 0.81 | 0.64 | 0.48 | 0.62 | 0.11 | R2 |
| Urban | 0.35 | 0.46 | 0.67 | 0.81 | 0.85 | 0.85 | 0.85 | 0.86 | 0.71 | 0.71 | 0.07 | 0.00–0.25 | |
| Water | 0.44 | 0.55 | 0.64 | 0.72 | 0.79 | 0.71 | 0.74 | 0.83 | 0.74 | 0.68 | 0.13 | 0.26–0.50 | |
| Forest | 0.49 | 0.53 | 0.60 | 0.46 | 0.67 | 0.69 | 0.72 | 0.69 | 0.50 | 0.60 | 0.05 | 0.51–0.75 | |
| Seminatural-natural | 0.59 | 0.64 | 0.72 | 0.64 | 0.81 | 0.81 | 0.81 | 0.81 | 0.35 | 0.69 | 0.07 | 0.76–1.00 | |
| Grassland | 0.30 | 0.35 | 0.35 | 0.45 | 0.66 | 0.68 | 0.68 | 0.58 | 0.50 | 0.51 | 0.11 | ||
| L-MCD43A4 | Agriculture | 0.21 | 0.45 | 0.46 | 0.62 | 0.64 | 0.74 | 0.74 | 0.61 | 0.48 | 0.55 | 0.11 | |
| Urban | 0.14 | 0.18 | 0.62 | 0.77 | 0.86 | 0.81 | 0.85 | 0.81 | 0.79 | 0.65 | 0.07 | ||
| Water | 0.48 | 0.50 | 0.67 | 0.59 | 0.79 | 0.74 | 0.74 | 0.74 | 0.79 | 0.67 | 0.13 | ||
| Forest | 0.45 | 0.36 | 0.31 | 0.40 | 0.64 | 0.56 | 0.50 | 0.45 | 0.45 | 0.46 | 0.06 | ||
| Seminatural-natural | 0.14 | 0.32 | 0.58 | 0.48 | 0.76 | 0.71 | 0.77 | 0.71 | 0.64 | 0.57 | 0.07 | ||
| Grassland | 0.28 | 0.18 | 0.13 | 0.34 | 0.64 | 0.67 | 0.64 | 0.53 | 0.32 | 0.41 | 0.11 | ||
| L-MOD09GQ | Agriculture | 0.18 | 0.22 | 0.46 | 0.26 | 0.59 | 0.61 | 0.64 | 0.58 | 0.36 | 0.43 | 0.13 | |
| Urban | 0.12 | 0.17 | 0.56 | 0.55 | 0.69 | 0.61 | 0.67 | 0.74 | 0.72 | 0.54 | 0.10 | ||
| Water | 0.38 | 0.48 | 0.59 | 0.55 | 0.64 | 0.62 | 0.55 | 0.69 | 0.71 | 0.58 | 0.18 | ||
| Forest | 0.45 | 0.37 | 0.22 | 0.17 | 0.32 | 0.27 | 0.23 | 0.31 | 0.14 | 0.28 | 0.09 | ||
| Seminatural-natural | 0.20 | 0.46 | 0.61 | 0.56 | 0.59 | 0.59 | 0.67 | 0.49 | 0.48 | 0.52 | 0.10 | ||
| Grassland | 0.22 | 0.15 | 0.14 | 0.25 | 0.52 | 0.52 | 0.52 | 0.46 | 0.25 | 0.34 | 0.12 | ||
| L-MOD09Q1 | Agriculture | 0.24 | 0.23 | 0.38 | 0.32 | 0.45 | 0.56 | 0.41 | 0.53 | 0.30 | 0.38 | 0.15 | |
| Urban | 0.14 | 0.16 | 0.50 | 0.52 | 0.45 | 0.52 | 0.44 | 0.64 | 0.67 | 0.45 | 0.13 | ||
| Water | 0.42 | 0.41 | 0.59 | 0.46 | 0.49 | 0.41 | 0.45 | 0.69 | 0.67 | 0.51 | 0.21 | ||
| Forest | 0.45 | 0.32 | 0.17 | 0.29 | 0.23 | 0.25 | 0.23 | 0.30 | 0.45 | 0.30 | 0.10 | ||
| Seminatural-natural | 0.24 | 0.46 | 0.49 | 0.46 | 0.36 | 0.37 | 0.53 | 0.58 | 0.45 | 0.44 | 0.12 | ||
| Grassland | 0.20 | 0.42 | 0.59 | 0.32 | 0.45 | 0.38 | 0.40 | 0.46 | 0.18 | 0.38 | 0.12 | ||
| NDVI Product | LC Class | DOY | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 49 | 81 | 97 | 113 | 145 | 177 | 193 | 209 | 241 | 257 | 273 | 289 | 353 | Mean R2 | Mean RMSE | ||
| S-MOD13Q1 | Agriculture | 0.49 | 0.74 | 0.85 | 0.76 | 0.50 | 0.60 | 0.66 | 0.85 | 0.74 | 0.69 | 0.74 | 0.71 | 0.46 | 0.68 | 0.13 |
| Urban | 0.45 | 0.71 | 0.85 | 0.88 | 0.86 | 0.86 | 0.79 | 0.90 | 0.90 | 0.90 | 0.92 | 0.86 | 0.76 | 0.82 | 0.08 | |
| Water | 0.53 | 0.62 | 0.72 | 0.77 | 0.79 | 0.86 | 0.81 | 0.86 | 0.86 | 0.85 | 0.88 | 0.86 | 0.79 | 0.79 | 0.11 | |
| Forest | 0.67 | 0.85 | 0.79 | 0.94 | 0.40 | 0.53 | 0.18 | 0.66 | 0.29 | 0.42 | 0.42 | 0.34 | 0.23 | 0.52 | 0.09 | |
| Seminatural-natural | 0.55 | 0.71 | 0.90 | 0.86 | 0.83 | 0.81 | 0.67 | 0.86 | 0.72 | 0.77 | 0.86 | 0.79 | 0.56 | 0.76 | 0.11 | |
| Grassland | 0.18 | 0.37 | 0.69 | 0.66 | 0.45 | 0.22 | 0.44 | 0.74 | 0.58 | 0.64 | 0.72 | 0.61 | 0.35 | 0.51 | 0.11 | |
| S-MCD43A4 | Agriculture | 0.49 | 0.74 | 0.85 | 0.71 | 0.46 | 0.60 | 0.59 | 0.85 | 0.74 | 0.69 | 0.74 | 0.69 | 0.44 | 0.66 | 0.14 |
| Urban | 0.69 | 0.61 | 0.85 | 0.85 | 0.86 | 0.86 | 0.79 | 0.90 | 0.88 | 0.89 | 0.90 | 0.85 | 0.76 | 0.82 | 0.08 | |
| Water | 0.38 | 0.48 | 0.71 | 0.74 | 0.76 | 0.86 | 0.81 | 0.85 | 0.85 | 0.83 | 0.88 | 0.83 | 0.76 | 0.75 | 0.12 | |
| Forest | 0.42 | 0.76 | 0.74 | 0.45 | 0.28 | 0.53 | 0.15 | 0.62 | 0.28 | 0.42 | 0.41 | 0.30 | 0.14 | 0.42 | 0.11 | |
| Seminatural-natural | 0.64 | 0.67 | 0.74 | 0.66 | 0.64 | 0.76 | 0.53 | 0.83 | 0.69 | 0.76 | 0.85 | 0.76 | 0.52 | 0.69 | 0.10 | |
| Grassland | 0.64 | 0.53 | 0.62 | 0.53 | 0.35 | 0.20 | 0.44 | 0.72 | 0.56 | 0.64 | 0.72 | 0.59 | 0.34 | 0.53 | 0.11 | |
| S-MOD09GQ | Agriculture | 0.71 | 0.76 | 0.83 | 0.71 | 0.49 | 0.40 | 0.61 | 0.83 | 0.72 | 0.69 | 0.74 | 0.69 | 0.44 | 0.66 | 0.14 |
| Urban | 0.42 | 0.61 | 0.85 | 0.85 | 0.86 | 0.85 | 0.79 | 0.88 | 0.88 | 0.88 | 0.90 | 0.85 | 0.74 | 0.80 | 0.09 | |
| Water | 0.42 | 0.53 | 0.72 | 0.72 | 0.76 | 0.83 | 0.83 | 0.83 | 0.86 | 0.85 | 0.88 | 0.85 | 0.76 | 0.76 | 0.12 | |
| Forest | 0.37 | 0.77 | 0.74 | 0.46 | 0.23 | 0.36 | 0.18 | 0.42 | 0.26 | 0.41 | 0.40 | 0.28 | 0.14 | 0.39 | 0.11 | |
| Seminatural-natural | 0.86 | 0.77 | 0.71 | 0.64 | 0.66 | 0.72 | 0.67 | 0.77 | 0.69 | 0.76 | 0.83 | 0.72 | 0.50 | 0.72 | 0.10 | |
| Grassland | 0.67 | 0.53 | 0.61 | 0.55 | 0.36 | 0.20 | 0.42 | 0.66 | 0.53 | 0.64 | 0.71 | 0.56 | 0.31 | 0.52 | 0.11 | |
| S-MOD09Q1 | Agriculture | 0.64 | 0.76 | 0.83 | 0.69 | 0.46 | 0.40 | 0.62 | 0.79 | 0.72 | 0.69 | 0.74 | 0.69 | 0.45 | 0.65 | 0.14 |
| Urban | 0.69 | 0.64 | 0.85 | 0.85 | 0.83 | 0.85 | 0.81 | 0.85 | 0.88 | 0.88 | 0.90 | 0.83 | 0.64 | 0.81 | 0.08 | |
| Water | 0.36 | 0.50 | 0.72 | 0.74 | 0.76 | 0.85 | 0.79 | 0.74 | 0.85 | 0.83 | 0.88 | 0.85 | 0.76 | 0.74 | 0.12 | |
| Forest | 0.45 | 0.77 | 0.74 | 0.42 | 0.20 | 0.48 | 0.16 | 0.35 | 0.26 | 0.42 | 0.42 | 0.27 | 0.14 | 0.39 | 0.11 | |
| Seminatural-natural | 0.69 | 0.76 | 0.72 | 0.64 | 0.61 | 0.76 | 0.52 | 0.71 | 0.67 | 0.74 | 0.85 | 0.72 | 0.49 | 0.68 | 0.11 | |
| Grassland | 0.66 | 0.50 | 0.61 | 0.55 | 0.34 | 0.24 | 0.44 | 0.62 | 0.53 | 0.64 | 0.74 | 0.58 | 0.32 | 0.52 | 0.13 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dhillon, M.S.; Dahms, T.; Kübert-Flock, C.; Steffan-Dewenter, I.; Zhang, J.; Ullmann, T. Spatiotemporal Fusion Modelling Using STARFM: Examples of Landsat 8 and Sentinel-2 NDVI in Bavaria. Remote Sens. 2022, 14, 677. https://doi.org/10.3390/rs14030677
Dhillon MS, Dahms T, Kübert-Flock C, Steffan-Dewenter I, Zhang J, Ullmann T. Spatiotemporal Fusion Modelling Using STARFM: Examples of Landsat 8 and Sentinel-2 NDVI in Bavaria. Remote Sensing. 2022; 14(3):677. https://doi.org/10.3390/rs14030677
Chicago/Turabian StyleDhillon, Maninder Singh, Thorsten Dahms, Carina Kübert-Flock, Ingolf Steffan-Dewenter, Jie Zhang, and Tobias Ullmann. 2022. "Spatiotemporal Fusion Modelling Using STARFM: Examples of Landsat 8 and Sentinel-2 NDVI in Bavaria" Remote Sensing 14, no. 3: 677. https://doi.org/10.3390/rs14030677
APA StyleDhillon, M. S., Dahms, T., Kübert-Flock, C., Steffan-Dewenter, I., Zhang, J., & Ullmann, T. (2022). Spatiotemporal Fusion Modelling Using STARFM: Examples of Landsat 8 and Sentinel-2 NDVI in Bavaria. Remote Sensing, 14(3), 677. https://doi.org/10.3390/rs14030677