
LiDAR as a Tool for Assessing Timber Assortments: A Systematic Literature Review



Abstract
:1. Introduction
Background

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LiDAR Systems | ||||
|---|---|---|---|---|
| Tree Measurements | Airborne (i.e., ALS, ULS) | Terrestrial (i.e., TLS, PLS) | Satellite (i.e., GEDI) | |
| 1 | Diameter at breast height * | x | x | - |
| 2 | Tree height * | x | x | x |
| 3 | Basal area * | x | x | - |
| 4 | Tree position and tree crown delineation ** | x | x | - |
| 5 | Tree crown measurements and tree density ** | x | x | - |
| 6 | Tree species composition ** | x | x | - |
| 7 | Stem volume and growing stock volume * | x | x | x |
| 8 | Aboveground biomass and carbon stock * | x | x | x |
| 9 | Timber-leaf discrimination | - | x | - |
| 10 | Stem curve and taper curve ** | x | x | - |
| 11 | Timber assortments (i.e., pulpwood) * | x | x | - |
| 12 | Stem straightness and stem diameters | - | x | - |
| 13 | Some vegetation indices (i.e., leaf area index) * | x | x | x |
| 14 | Leaf area distribution * | x | x | x |
| 15 | Percent cover and gap fraction * | x | x | x |
| 16 | Log geometry and wood quality | - | x | - |
| 17 | Downed dead wood * | x | x | - |
| 18 | Branch sizes, positions, and orientations | - | x | - |
| 19 | Harvested trees detection ** | x | x | x |
2. Methodological Approach
2.1. Paper Collection
2.2. Paper Analysis
2.2.1. LiDAR Systems Implementation
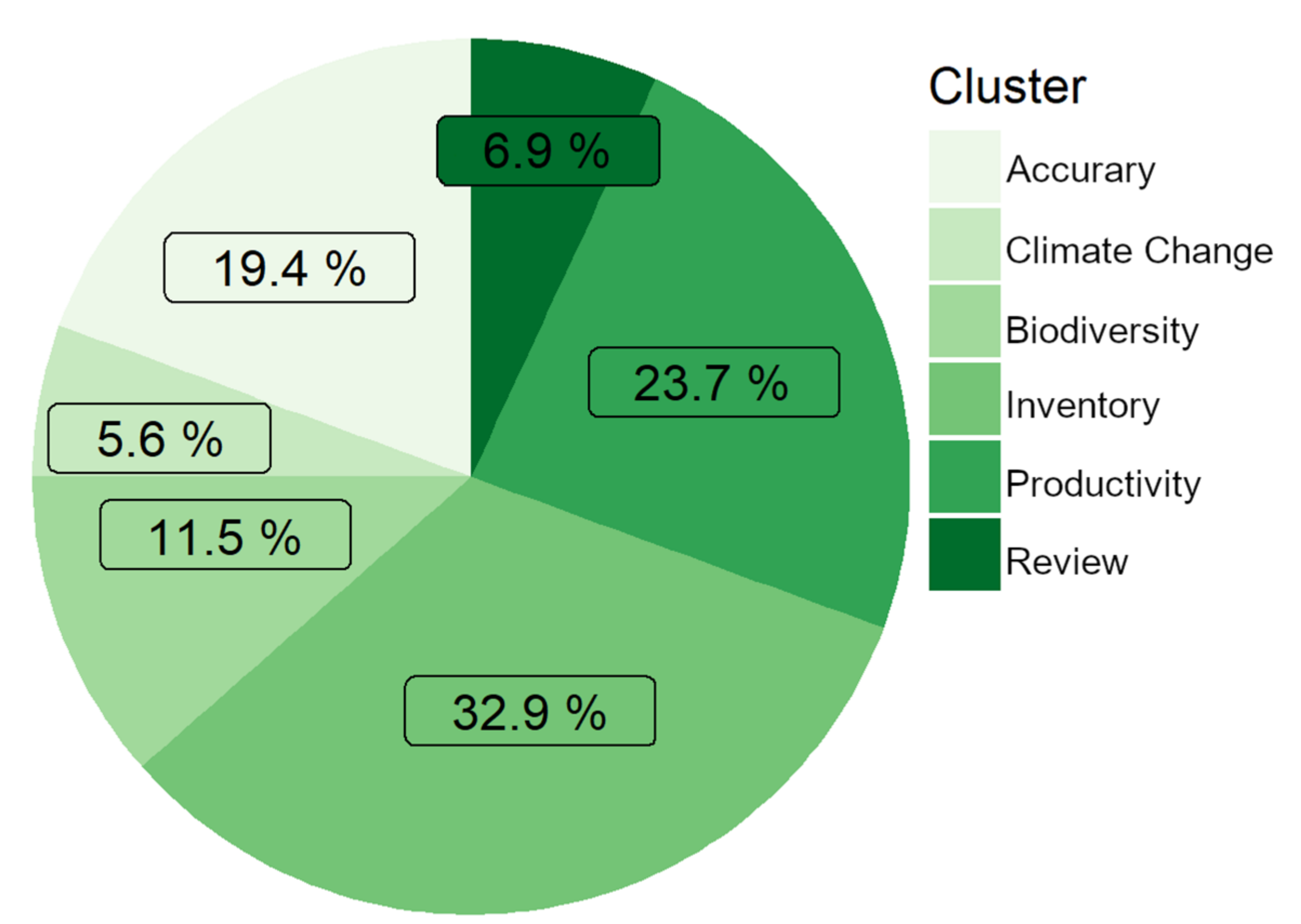
2.2.2. What Are the Main Uses of LiDAR for Forest Estimates?
- ➢
- Inventory (I) includes the papers that used satellite, airborne, and terrestrial LiDAR systems for the estimation of the most common forest inventory variables (e.g., DBH, TH, and BA) over distinct forest types to support forest statistics, reports, and monitoring activities.
- ➢
- Productivity (P) includes the papers that dealt with the assessment of timber productivity in terms of stem volume, AGB, carbon stock, sawlog volume, and pulpwood volume.
- ➢
- Accuracy (A) includes the papers that tested and compared different algorithms, methods, or approaches for improving either the pre-processing or processing of point clouds acquired by LiDAR systems.
- ➢
- Biodiversity (B) includes the papers that used the forest structure reconstructed by LiDAR systems to assess indicators of biodiversity, e.g., the occurrence of bird species, tree species composition, and habitat quality.
- ➢
- Climate change (C) includes the papers that assessed the climate change effects on forest stands, evaluated the health status of forests using LiDAR systems, or mapped the occurrence of disturbing events (i.e., fire, pests, landslides, and drought events).
- ➢
- Review (R) includes the paper reviews found in the database.
2.2.3. Advances in the Methods and Outputs of LiDAR Systems
3. How Are Forest Monitoring and Management Supported by LiDAR Systems?
3.1. Literature Review
3.2. Advances in LiDAR System Implementations
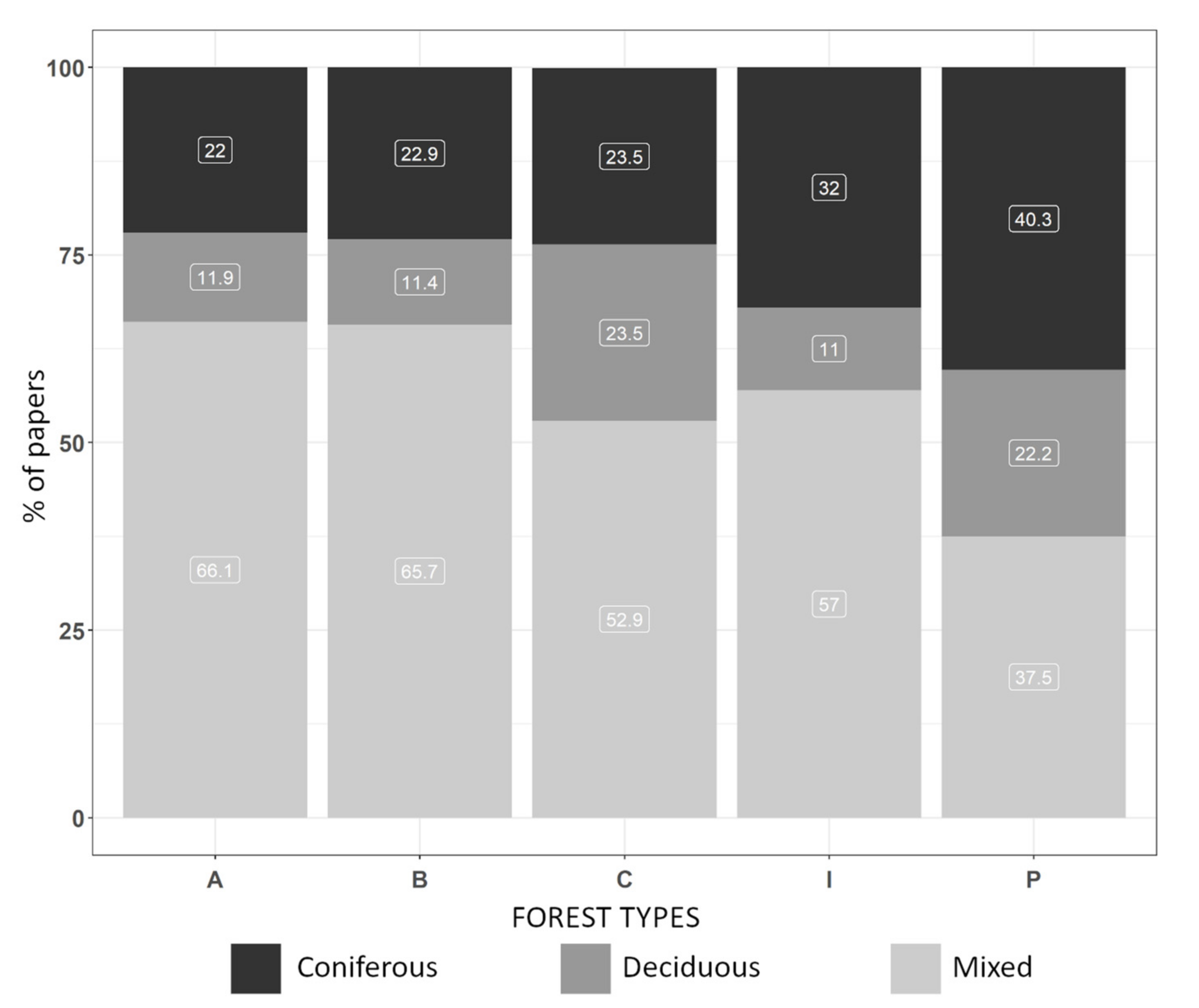
3.3. Forest-Related Topics Explored Using LiDAR Systems
3.4. Advances in the Methods and Outputs of LiDAR Systems
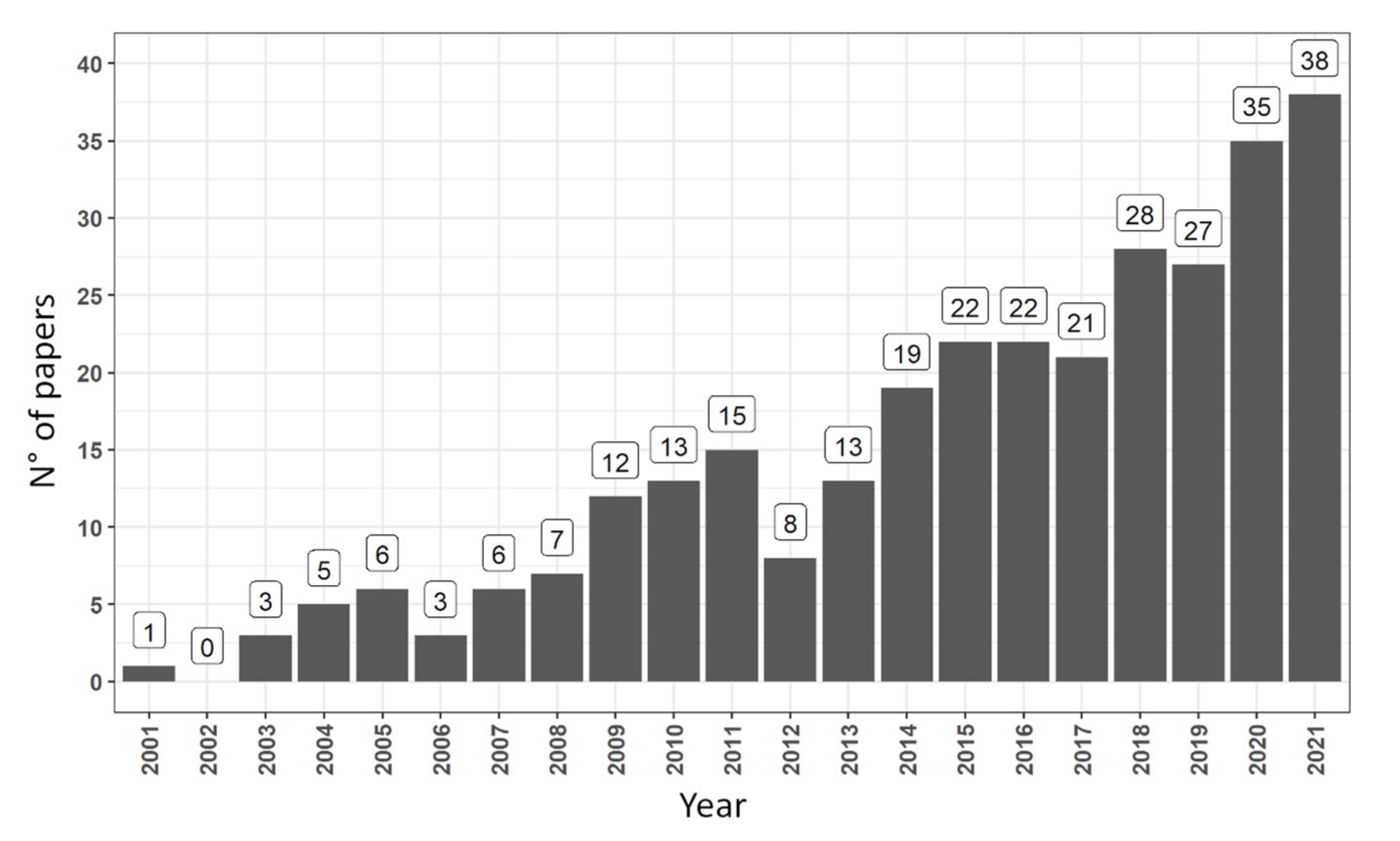
3.5. Diachronic Analysis of LiDAR Implementation
3.6. The Development of Methods for Assessing Timber Assortments Using LiDAR Systems
4. Discussion
4.1. Advances in the Implementation of LiDAR Systems
4.2. Advances in LiDAR Methods and Outputs
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- State of Europe Forests. Summary for Policy Markers State of Europe’s Forest. In Proceedings of the Ministerial Conference on the Protection of Forests in Europe, Bratislava, Slovakia, 14–15 April 2020; Liasion Unit Bratislava: Bratislava, Slovakia, 2020; Volume 4, pp. 64–75. [Google Scholar]
- Fattorini, L. Design-based methodological advances to support national forest inventories: A review of recent proposals. iForest Biogeosciences For. 2015, 8, 6–11. [Google Scholar] [CrossRef]
- Kivinen, V.-P. Design and testing of stand-specific bucking instructions for use on modern cut-to-length harvesters. Ph.D. Thesis, University of Helsinki, Helsinki, Finland, 2007. [Google Scholar] [CrossRef]
- Togni, M. Classificazione commerciale del legname grezzo tondo: Regole per la classificazione visuale dei tronchi. In Ente Regionale per i Servizi All’Agricoltura e Alle Foreste; West, P.W., Ed.; ERSAF: Lombardia, Italy, 2017; p. 97. [Google Scholar]
- West, P.W.; West, P.W. Tree and Forest Measurement, 3rd ed.; Springer: Berlin, Germany, 2009; p. 214. [Google Scholar]
- Malinen, J.; Teppo, P.; Harri, K.; Tapio, W.; Erkki, V. Timber assortment recovery models for southern Finland. Balt. For. 2010, 16, 102–112. [Google Scholar]
- Næsset, E. Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. Remote Sens. Environ. 2001, 80, 88–99. [Google Scholar] [CrossRef]
- Pfeifer, N.; Gorte, B.; Winterhalder, D. Automatic reconstruction of single trees from terrestrial laser scanner data. In Proceedings of the 20th ISPRS Congress, Istanbul, Turkey, 12–23 July 2004; Volume 35, pp. 114–119. [Google Scholar]
- Chirici, G.; Giannetti, F.; McRoberts, R.E.; Travaglini, D.; Pecchi, M.; Maselli, F.; Chiesi, M.; Corona, P. Wall-to-wall spatial prediction of growing stock volume based on Italian National Forest Inventory plots and remotely sensed data. Int. J. Appl. earth Obs. geoinformation ITC J. 2019, 84, 101959. [Google Scholar] [CrossRef]
- Dubayah, R.; Goetz, S.J.; Blair, J.B.; Fatoyinbo, T.E.; Hansen, M.; Healey, S.P.; Hofton, M.A.; Hurtt, G.C.; Kellner, J.; Luthcke, S.B. The Global Ecosystem Dynamics Investigation. In Proceedings of the AGU Fall Meeting, San Francisco, CA, USA, 15–19 December 2014; p. 07D. [Google Scholar]
- Chen, Q. Modeling aboveground tree woody biomass using national-scale allometric methods and airborne lidar. ISPRS J. Photogramm. Remote Sens. 2015, 106, 95–106. [Google Scholar] [CrossRef]
- Lin, C.; Thomson, G.; Popescu, S.C. An IPCC-Compliant Technique for Forest Carbon Stock Assessment Using Airborne LiDAR-Derived Tree Metrics and Competition Index. Remote Sens. 2016, 8, 528. [Google Scholar] [CrossRef]
- Francini, S.; D’Amico, G.; Vangi, E.; Borghi, C.; Chirici, G. Integrating GEDI and Landsat: Spaceborne Lidar and Four Decades of Optical Imagery for the Analysis of Forest Disturbances and Biomass Changes in Italy. Sensors 2022, 22, 2015. [Google Scholar] [CrossRef]
- Beland, M.; Parker, G.; Sparrow, B.; Harding, D.; Chasmer, L.; Phinn, S.; Antonarakis, A.; Strahler, A. On promoting the use of lidar systems in forest ecosystem research. For. Ecol. Manag. 2019, 450, 117484. [Google Scholar] [CrossRef]
- Coops, N.C.; Tompalski, P.; Goodbody, T.R.; Queinnec, M.; Luther, J.E.; Bolton, D.K.; White, J.C.; Wulder, M.A.; van Lier, O.R.; Hermosilla, T. Modelling lidar-derived estimates of forest attributes over space and time: A review of approaches and future trends. Remote Sens. Environ. 2021, 260, 112477. [Google Scholar] [CrossRef]
- Valbuena, R.; O’Connor, B.; Zellweger, F.; Simonson, W.; Vihervaara, P.; Maltamo, M.; Silva, C.; Almeida, D.; Danks, F.; Morsdorf, F.; et al. Standardizing Ecosystem Morphological Traits from 3D Information Sources. Trends Ecol. Evol. 2020, 35, 656–667. [Google Scholar] [CrossRef]
- Silva, C.A.; Duncanson, L.; Hancock, S.; Neuenschwander, A.; Thomas, N.; Hofton, M.; Fatoyinbo, L.; Simard, M.; Marshak, C.Z.; Armston, J.; et al. Fusing simulated GEDI, ICESat-2 and NISAR data for regional aboveground biomass mapping. Remote Sens. Environ. 2021, 253, 112234. [Google Scholar] [CrossRef]
- Duncanson, L.; Kellner, J.R.; Armston, J.; Dubayah, R.; Minor, D.M.; Hancock, S.; Healey, S.P.; Patterson, P.L.; Saarela, S.; Marselis, S.; et al. Aboveground biomass density models for NASA’s Global Ecosystem Dynamics Investigation (GEDI) lidar mission. Remote Sens. Environ. 2022, 270, 112845. [Google Scholar] [CrossRef]
- Nelson, R.; Ranson, K.; Sun, G.; Kimes, D.; Kharuk, V.; Montesano, P. Estimating Siberian timber volume using MODIS and ICESat/GLAS. Remote Sens. Environ. 2009, 113, 691–701. [Google Scholar] [CrossRef]
- Chi, H.; Sun, G.; Huang, J.; Li, R.; Ren, X.; Ni, W.; Fu, A. Estimation of Forest Aboveground Biomass in Changbai Mountain Region Using ICESat/GLAS and Landsat/TM Data. Remote Sens. 2017, 9, 707. [Google Scholar] [CrossRef]
- Liu, A.; Cheng, X.; Chen, Z. Performance evaluation of GEDI and ICESat-2 laser altimeter data for terrain and canopy height retrievals. Remote Sens. Environ. 2021, 264, 112571. [Google Scholar] [CrossRef]
- Kirkeby, C.; Wellenreuther, M.; Brydegaard, M. Observations of movement dynamics of flying insects using high resolution lidar. Sci. Rep. 2016, 6, 29083. [Google Scholar] [CrossRef]
- Smigaj, M.; Gaulton, R.; Suárez, J.C.; Barr, S.L. Canopy temperature from an Unmanned Aerial Vehicle as an indicator of tree stress associated with red band needle blight severity. For. Ecol. Manag. 2019, 433, 699–708. [Google Scholar] [CrossRef]
- Riedler, B.; Pernkopf, L.; Strasser, T.; Lang, S.; Smith, G. A composite indicator for assessing habitat quality of riparian forests derived from Earth observation data. Int. J. Appl. Earth Obs. Geoinformation ITC J. 2015, 37, 114–123. [Google Scholar] [CrossRef]
- Lindberg, E.; Eysn, L.; Hollaus, M.; Holmgren, J.; Pfeifer, N. Delineation of Tree Crowns and Tree Species Classification From Full-Waveform Airborne Laser Scanning Data Using 3-D Ellipsoidal Clustering. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 3174–3181. [Google Scholar] [CrossRef]
- Cuni-Sanchez, A.; White, L.J.T.; Calders, K.; Jeffery, K.J.; Abernethy, K.; Burt, A.; Disney, M.; Gilpin, M.; Gomez-Dans, J.L.; Lewis, S. African Savanna-Forest Boundary Dynamics: A 20-Year Study. PLoS ONE 2016, 11, e0156934. [Google Scholar] [CrossRef]
- Santopuoli, G.; Di Febbraro, M.; Maesano, M.; Balsi, M.; Marchetti, M.; Lasserre, B. Machine Learning Algorithms to Predict Tree-Related Microhabitats using Airborne Laser Scanning. Remote Sens. 2020, 12, 2142. [Google Scholar] [CrossRef]
- Calders, K.; Adams, J.; Armston, J.; Bartholomeus, H.; Bauwens, S.; Bentley, L.P.; Chave, J.; Danson, F.M.; Demol, M.; Disney, M.; et al. Terrestrial laser scanning in forest ecology: Expanding the horizon. Remote Sens. Environ. 2020, 251, 112102. [Google Scholar] [CrossRef]
- Dassot, M.; Constant, T.; Fournier, M. The use of terrestrial LiDAR technology in forest science: Application fields, Benefits and Challenges The use of terrestrial LiDAR technology in forest science: Application fields, benefits and challenges. Ann. For. Sci. 2011, 68, 959–974. [Google Scholar] [CrossRef]
- Liang, X.; Wang, Y.; Pyörälä, J.; Lehtomäki, M.; Yu, X.; Kaartinen, H.; Kukko, A.; Honkavaara, E.; Issaoui, A.E.I.; Nevalainen, O.; et al. Forest in situ observations using unmanned aerial vehicle as an alternative of terrestrial measurements. For. Ecosyst. 2019, 6, 20. [Google Scholar] [CrossRef]
- Saarinen, N.; Kankare, V.; Vastaranta, M.; Luoma, V.; Pyörälä, J.; Tanhuanpää, T.; Liang, X.; Kaartinen, H.; Kukko, A.; Jaakkola, A.; et al. Feasibility of Terrestrial laser scanning for collecting stem volume information from single trees. ISPRS J. Photogramm. Remote Sens. 2017, 123, 140–158. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppä, J.; Kaartinen, H.; Lehtomäki, M.; Pyörälä, J.; Pfeifer, N.; Holopainen, M.; Brolly, G.; Francesco, P.; Hackenberg, J.; et al. International benchmarking of terrestrial laser scanning approaches for forest inventories. ISPRS J. Photogramm. Remote Sens. 2018, 144, 137–179. [Google Scholar] [CrossRef]
- Oveland, I.; Hauglin, M.; Giannetti, F.; Kjørsvik, N.S.; Gobakken, T. Comparing Three Different Ground Based Laser Scanning Methods for Tree Stem Detection. Remote Sens. 2018, 10, 538. [Google Scholar] [CrossRef]
- Hyyppä, E.; Yu, X.; Kaartinen, H.; Hakala, T.; Kukko, A.; Vastaranta, M.; Hyyppä, J. Comparison of Backpack, Handheld, Under-Canopy UAV, and Above-Canopy UAV Laser Scanning for Field Reference Data Collection in Boreal Forests. Remote Sens. 2020, 12, 3327. [Google Scholar] [CrossRef]
- Lau, A.; Martius, C.; Bartholomeus, H.; Shenkin, A.; Jackson, T.; Malhi, Y.; Herold, M.; Bentley, L.P. Estimating architecture-based metabolic scaling exponents of tropical trees using terrestrial LiDAR and 3D modelling. For. Ecol. Manag. 2019, 439, 132–145. [Google Scholar] [CrossRef]
- Disney, M. Terrestrial LiDAR: A three-dimensional revolution in how we look at trees. New Phytol. 2019, 222, 1736–1741. [Google Scholar] [CrossRef] [Green Version]
- Reckziegel, R.B.; Mbongo, W.; Kunneke, A.; Morhart, C.; Sheppard, J.P.; Chirwa, P.; du Toit, B.; Kahle, H.-P. Exploring the Branch Wood Supply Potential of an Agroforestry System with Strategically Designed Harvesting Interventions Based on Terrestrial LiDAR Data. Forests 2022, 13, 650. [Google Scholar] [CrossRef]
- Jaakkola, A.; Hyyppä, J.; Kukko, A.; Yu, X.; Kaartinen, H.; Lehtomäki, M.; Lin, Y. A low-cost multi-sensoral mobile mapping system and its feasibility for tree measurements. ISPRS J. Photogramm. Remote Sens. 2010, 65, 514–522. [Google Scholar] [CrossRef]
- Torresan, C.; Berton, A.; Carotenuto, F.; Di Gennaro, S.F.; Gioli, B.; Matese, A.; Miglietta, F.; Vagnoli, C.; Zaldei, A.; Wallace, L. Forestry applications of UAVs in Europe: A review. Int. J. Remote Sens. 2017, 38, 2427–2447. [Google Scholar] [CrossRef]
- Guimarães, N.; Pádua, L.; Marques, P.; Silva, N.; Peres, E.; Sousa, J.J. Forestry Remote Sensing from Unmanned Aerial Vehicles: A Review Focusing on the Data, Processing and Potentialities. Remote Sens. 2020, 12, 1046. [Google Scholar] [CrossRef]
- Maltamo, M.; Packalen, P.; Kangas, A. From comprehensive field inventories to remotely sensed wall-to-wall stand attribute data—A brief history of management inventories in the Nordic countries. Can. J. For. Res. 2021, 51, 257–266. [Google Scholar] [CrossRef]
- Goodbody, T.R.; Coops, N.C.; Marshall, P.L.; Tompalski, P.; Crawford, P. Unmanned aerial systems for precision forest inventory purposes: A review and case study. For. Chron. 2017, 93, 71–81. [Google Scholar] [CrossRef]
- Mulverhill, C.; Coops, N.C.; Hermosilla, T.; White, J.C.; Wulder, M.A. Evaluating ICESat-2 for monitoring, modeling, and update of large area forest canopy height products. Remote Sens. Environ. 2022, 271, 112919. [Google Scholar] [CrossRef]
- White, J.C.; Wulder, M.A.; Buckmaster, G. Validating estimates of merchantable volume from airborne laser scanning (ALS) data using weight scale data. For. Chron. 2014, 90, 378–385. [Google Scholar] [CrossRef]
- Silva, C.A.; Klauberg, C.; Hudak, A.T.; Vierling, L.A.; Jaafar, W.S.W.M.; Mohan, M.; Garcia, M.; Ferraz, A.; Cardil, A.; Saatchi, S. Predicting Stem Total and Assortment Volumes in an Industrial Pinus taeda L. Forest Plantation Using Airborne Laser Scanning Data and Random Forest. Forests 2017, 8, 254. [Google Scholar] [CrossRef]
- Holopainen, M.; Vastaranta, M.; Hyyppä, J. Outlook for the Next Generation’s Precision Forestry in Finland. Forests 2014, 5, 1682–1694. [Google Scholar] [CrossRef] [Green Version]
- Alvites, C.; Santopuoli, G.; Hollaus, M.; Pfeifer, N.; Maesano, M.; Moresi, F.V.; Marchetti, M.; Lasserre, B. Terrestrial Laser Scanning for Quantifying Timber Assortments from Standing Trees in a Mixed and Multi-Layered Mediterranean Forest. Remote Sens. 2021, 13, 4265. [Google Scholar] [CrossRef]
- Montaghi, A.; Corona, P.; Dalponte, M.; Gianelle, D.; Chirici, G.; Olsson, H. Airborne laser scanning of forest resources: An overview of research in Italy as a commentary case study. Int. J. Appl. Earth Obs. Geoinformation ITC J.G 2012, 23, 288–300. [Google Scholar] [CrossRef]
- D’Oliveira, M.V.; Reutebuch, S.E.; McGaughey, R.J.; Andersen, H.-E. Estimating forest biomass and identifying low-intensity logging areas using airborne scanning lidar in Antimary State Forest, Acre State, Western Brazilian Amazon. Remote Sens. Environ. 2012, 124, 479–491. [Google Scholar] [CrossRef]
- Næsset, E.; Gobakken, T.; Solberg, S.; Gregoire, T.G.; Nelson, R.; Ståhl, G.; Weydahl, D. Model-assisted regional forest biomass estimation using LiDAR and InSAR as auxiliary data: A case study from a boreal forest area. Remote Sens. Environ. 2011, 115, 3599–3614. [Google Scholar] [CrossRef]
- Marselis, S.M.; Tang, H.; Armston, J.D.; Calders, K.; Labrière, N.; Dubayah, R. Distinguishing vegetation types with airborne waveform lidar data in a tropical forest-savanna mosaic: A case study in Lopé National Park, Gabon. Remote Sens. Environ. 2018, 216, 626–634. [Google Scholar] [CrossRef]
- Yu, X.; Hyyppä, J.; Holopainen, M.; Vastaranta, M. Comparison of Area-Based and Individual Tree-Based Methods for Predicting Plot-Level Forest Attributes. Remote Sens. 2010, 2, 1481–1495. [Google Scholar] [CrossRef]
- Wang, Y.; Hyyppa, J.; Liang, X.; Kaartinen, H.; Yu, X.; Lindberg, E.; Holmgren, J.; Qin, Y.; Mallet, C.; Ferraz, A.; et al. International Benchmarking of the Individual Tree Detection Methods for Modeling 3-D Canopy Structure for Silviculture and Forest Ecology Using Airborne Laser Scanning. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5011–5027. [Google Scholar] [CrossRef]
- Sačkov, I.; Santopuoli, G.; Bucha, T.; Lasserre, B.; Marchetti, M. Forest Inventory Attribute Prediction Using Lightweight Aerial Scanner Data in a Selected Type of Multilayered Deciduous Forest. Forests 2016, 7, 307. [Google Scholar] [CrossRef]
- Hamraz, H.; Contreras, M.A.; Zhang, J. Vertical stratification of forest canopy for segmentation of understory trees within small-footprint airborne LiDAR point clouds. ISPRS J. Photogramm. Remote Sens. 2017, 130, 385–392. [Google Scholar] [CrossRef]
- Alvites, C.; Santopuoli, G.; Maesano, M.; Chirici, G.; Moresi, F.V.; Tognetti, R.; Marchetti, M.; Lasserre, B. Unsupervised algorithms to detect single trees in a mixed-species and multilayered Mediterranean forest using LiDAR data. Can. J. For. Res. 2021, 51, 1766–1780. [Google Scholar] [CrossRef]
- Molina-Valero, J.A.; Martínez-Calvo, A.; Villamayor, M.J.G.; Pérez, M.A.N.; Álvarez-González, J.G.; Montes, F.; Pérez-Cruzado, C. Operationalizing the use of TLS in forest inventories: The R package FORTLS. Environ. Model. Softw. 2022, 150, 105337. [Google Scholar] [CrossRef]
- Vizzarri, M.; Chiavetta, U.; Santopuoli, G.; Tonti, D.; Marchetti, M. Mapping forest ecosystem functions for landscape planning in a mountain Natura2000 site, Central Italy. J. Environ. Plan. Manag. 2015, 58, 1454–1478. [Google Scholar] [CrossRef]
- Wehr, A.; Lohr, U. Airborne laser scanning—an introduction and overview. ISPRS J. Photogramm. Remote Sens. 1999, 54, 68–82. [Google Scholar] [CrossRef]
- Ke, Y.; Quackenbush, L.J.; Im, J. Synergistic use of QuickBird multispectral imagery and LIDAR data for object-based forest species classification. Remote Sens. Environ. 2010, 114, 1141–1154. [Google Scholar] [CrossRef]
- Clawges, R.; Vierling, K.; Vierling, L.; Rowell, E. The use of airborne lidar to assess avian species diversity, density, and occurrence in a pine/aspen forest. Remote Sens. Environ. 2008, 112, 2064–2073. [Google Scholar] [CrossRef]
- Popescu, S.; Wynne, R.H.; Nelson, R.F. Measuring individual tree crown diameter with lidar and assessing its influence on estimating forest volume and biomass. Can. J. Remote Sens. 2003, 29, 564–577. [Google Scholar] [CrossRef]
- Maltamo, M.; Eerikäinen, K.; Pitkänen, J.; Hyyppä, J.; Vehmas, M. Estimation of timber volume and stem density based on scanning laser altimetry and expected tree size distribution functions. Remote Sens. Environ. 2004, 90, 319–330. [Google Scholar] [CrossRef]
- Chen, Q.; Gong, P.; Baldocchi, D.; Tian, Y.Q. Estimating Basal Area and Stem Volume for Individual Trees from Lidar Data. Photogramm. Eng. Remote Sens. 2007, 73, 1355–1365. [Google Scholar] [CrossRef]
- Antonarakis, A.; Richards, K.S.; Brasington, J.; Bithell, M. Leafless roughness of complex tree morphology using terrestrial lidar. Water Resour. Res. 2009, 45, 1–14. [Google Scholar] [CrossRef]
- Kim, Y.; Yang, Z.; Cohen, W.B.; Pflugmacher, D.; Lauver, C.L.; Vankat, J.L. Distinguishing between live and dead standing tree biomass on the North Rim of Grand Canyon National Park, USA using small-footprint lidar data. Remote Sens. Environ. 2009, 113, 2499–2510. [Google Scholar] [CrossRef]
- Latifi, H.; Nothdurft, A.; Koch, B. Non-parametric prediction and mapping of standing timber volume and biomass in a temperate forest: Application of multiple optical/LiDAR-derived predictors. For. Int. J. For. Res. 2010, 83, 395–407. [Google Scholar] [CrossRef]
- Yao, T.; Yang, X.; Zhao, F.; Wang, Z.; Zhang, Q.; Jupp, D.; Lovell, J.; Culvenor, D.; Newnham, G.; Ni-Meister, W.; et al. Measuring forest structure and biomass in New England forest stands using Echidna ground-based lidar. Remote Sens. Environ. 2011, 115, 2965–2974. [Google Scholar] [CrossRef]
- Moorthy, I.; Miller, J.R.; Berni, J.A.J.; Zarco-Tejada, P.; Hu, B.; Chen, J. Field characterization of olive (Olea europaea L.) tree crown architecture using terrestrial laser scanning data. Agric. For. Meteorol. 2011, 151, 204–214. [Google Scholar] [CrossRef]
- Allouis, T.; Durrieu, S.; Vega, C.; Couteron, P. Stem Volume and Above-Ground Biomass Estimation of Individual Pine Trees From LiDAR Data: Contribution of Full-Waveform Signals. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 6, 924–934. [Google Scholar] [CrossRef]
- Hosoi, F.; Nakai, Y.; Omasa, K. 3-D voxel-based solid modeling of a broad-leaved tree for accurate volume estimation using portable scanning lidar. ISPRS J. Photogramm. Remote Sens. 2013, 82, 41–48. [Google Scholar] [CrossRef]
- Vastaranta, M.; Holopainen, M.; Karjalainen, M.; Kankare, V.; Hyyppa, J.; Kaasalainen, S. TerraSAR-X Stereo Radargrammetry and Airborne Scanning LiDAR Height Metrics in Imputation of Forest Aboveground Biomass and Stem Volume. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1197–1204. [Google Scholar] [CrossRef]
- Lang, M.; Arumäe, T.; Lükk, T.; Sims, A. Estimation of standing wood volume and species composition in managed nemoral multi-layer mixed forests by using nearest neighbour classifier, multispectral satellite images and airborne lidar data/Puistute liigilise koosseisu ja tüvemahu hindamine k-lähima naabri meetodil mitmerindelistes majandatavates segametsades. For. Stud. 2014, 61, 47–68. [Google Scholar] [CrossRef]
- Miller, J.; Morgenroth, J.; Gomez, C. 3D modelling of individual trees using a handheld camera: Accuracy of height, diameter and volume estimates. Urban For. Urban Green. 2015, 14, 932–940. [Google Scholar] [CrossRef]
- Shinzato, E.; Shimabukuro, Y.; Coops, N.; Tompalski, P.; Gasparoto, E. Integrating area-based and individual tree detection approaches for estimating tree volume in plantation inventory using aerial image and airborne laser scanning data. iForest-Biogeosciences For. 2017, 10, 296–302. [Google Scholar] [CrossRef]
- Yoga, S.; Bégin, J.; St-Onge, B.; Gatziolis, D. Lidar and Multispectral Imagery Classifications of Balsam Fir Tree Status for Accurate Predictions of Merchantable Volume. Forests 2017, 8, 253. [Google Scholar] [CrossRef] [Green Version]
- Wilkes, P.; Disney, M.; Vicari, M.; Calders, K.; Burt, A. Estimating urban above ground biomass with multi-scale LiDAR. Carbon Balance Manag. 2018, 13, 10. [Google Scholar] [CrossRef] [PubMed]
- Côté, J.-F.; Fournier, R.A.; Luther, J.E.; van Lier, O.R. Fine-scale three-dimensional modeling of boreal forest plots to improve forest characterization with remote sensing. Remote Sens. Environ. 2018, 219, 99–114. [Google Scholar] [CrossRef]
- Weinstein, B.G.; Marconi, S.; Bohlman, S.; Zare, A.; White, E. Individual Tree-Crown Detection in RGB Imagery Using Semi-Supervised Deep Learning Neural Networks. Remote Sens. 2019, 11, 1309. [Google Scholar] [CrossRef]
- Cao, L.; Liu, K.; Shen, X.; Wu, X.; Liu, H. Estimation of Forest Structural Parameters Using UAV-LiDAR Data and a Process-Based Model in Ginkgo Planted Forests. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 4175–4190. [Google Scholar] [CrossRef]
- Chen, S.; Liu, H.; Feng, Z.; Shen, C.; Chen, P. Applicability of personal laser scanning in forestry inventory. PLoS ONE 2019, 14, e0211392. [Google Scholar] [CrossRef]
- Socha, J.; Hawryło, P.; Stereńczak, K.; Miścicki, S.; Tymińska-Czabańska, L.; Młocek, W.; Gruba, P. Assessing the sensitivity of site index models developed using bi-temporal airborne laser scanning data to different top height estimates and grid cell sizes. Int. J. Appl. Earth Obs. Geoinformation ITC J. 2020, 91, 102129. [Google Scholar] [CrossRef]
- Da Silva, V.S.; Silva, C.A.; Mohan, M.; Cardil, A.; Rex, F.E.; Loureiro, G.H.; De Almeida, D.R.A.; Broadbent, E.N.; Gorgens, E.B.; Corte, A.P.D.; et al. Combined Impact of Sample Size and Modeling Approaches for Predicting Stem Volume in Eucalyptus spp. Forest Plantations Using Field and LiDAR Data. Remote Sens. 2020, 12, 1438. [Google Scholar] [CrossRef]
- Sanz, B.; Malinen, J.; Sirparanta, S.; Peuhkurinen, J.; Leppänen, V.; Melkas, T.; Riekki, K.; Kauranne, T.; Vastaranta, M.; Tokola, T. Integrating Detailed Timber Assortments into Airborne Laser Scanning (ALS)-Based Assessments of Logging Recoveries. Forests 2021, 12, 1221. [Google Scholar] [CrossRef]
- Li, D.; Guo, H.; Jia, W.; Wang, F. Analysis of Taper Functions for Larix olgensis Using Mixed Models and TLS. Forests 2021, 12, 196. [Google Scholar] [CrossRef]
- Leite, R.; Silva, C.; Mohan, M.; Cardil, A.; Almeida, D.; Carvalho, S.; Jaafar, W.; Guerra-Hernández, J.; Weiskittel, A.; Hudak, A.; et al. Individual Tree Attribute Estimation and Uniformity Assessment in Fast-Growing Eucalyptus spp. Forest Plantations Using Lidar and Linear Mixed-Effects Models. Remote Sens. 2020, 12, 3599. [Google Scholar] [CrossRef]
- Leite, R.V.; Amaral, C.H.D.; Pires, R.D.P.; Silva, C.A.; Soares, C.P.B.; Macedo, R.P.; Da Silva, A.A.L.; Broadbent, E.N.; Mohan, M.; Leite, H.G. Estimating Stem Volume in Eucalyptus Plantations Using Airborne LiDAR: A Comparison of Area- and Individual Tree-Based Approaches. Remote Sens. 2020, 12, 1513. [Google Scholar] [CrossRef]
- Hauglin, M.; Dibdiakova, J.; Gobakken, T.; Næsset, E. Estimating single-tree branch biomass of Norway spruce by airborne laser scanning. ISPRS J. Photogramm. Remote Sens. 2013, 79, 147–156. [Google Scholar] [CrossRef]
- Machimura, T.; Fujimoto, A.; Hayashi, K.; Takagi, H.; Sugita, S. A Novel Tree Biomass Estimation Model Applying the Pipe Model Theory and Adaptable to UAV-Derived Canopy Height Models. Forests 2021, 12, 258. [Google Scholar] [CrossRef]
- Lin, Y.-C.; Liu, J.; Fei, S.; Habib, A. Leaf-Off and Leaf-On UAV LiDAR Surveys for Single-Tree Inventory in Forest Plantations. Drones 2021, 5, 115. [Google Scholar] [CrossRef]
- Broughton, R.K.; Bellamy, P.E.; Hill, R.A.; Hinsley, S.A. Winter habitat selection by Marsh TitsPoecile palustrisin a British woodland. Bird Study 2014, 61, 404–412. [Google Scholar] [CrossRef]
- Zhao, Y.; Zeng, Y.; Zheng, Z.; Dong, W.; Zhao, D.; Wu, B.; Zhao, Q. Forest species diversity mapping using airborne LiDAR and hyperspectral data in a subtropical forest in China. Remote Sens. Environ. 2018, 213, 104–114. [Google Scholar] [CrossRef]
- Kelly, M.; Di Tommaso, S. Mapping forests with Lidar provides flexible, accurate data with many uses. Calif. Agric. 2015, 69, 14–20. [Google Scholar] [CrossRef]
- Vastaranta, M.; Saarinen, N.; Kankare, V.; Holopainen, M.; Kaartinen, H.; Hyyppä, J.; Hyyppä, H. Multisource Single-Tree Inventory in the Prediction of Tree Quality Variables and Logging Recoveries. Remote Sens. 2014, 6, 3475–3491. [Google Scholar] [CrossRef]
- Siipilehto, J.; Lindeman, H.; Vastaranta, M.; Yu, X.; Uusitalo, J. Reliability of the predicted stand structure for clear-cut stands using optional methods: Airborne laser scanning-based methods, smartphone-based forest inventory application Trestima and pre-harvest measurement tool EMO. Silva Fenn. 2016, 50. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Nelson, R.F.; Næsset, E.; Ørka, H.O.; Coops, N.C.; Hilker, T.; Bater, C.W.; Gobakken, T. Lidar Sampling for Large-Area Forest Characterization: A Review. Remote Sens. Environ. 2012, 121, 196–209. [Google Scholar] [CrossRef] [Green Version]
- Proietti, R.; Antonucci, S.; Monteverdi, M.C.; Garfì, V.; Marchetti, M.; Plutino, M.; Di Carlo, M.; Germani, A.; Santopuoli, G.; Castaldi, C.; et al. Monitoring spring phenology in Mediterranean beech populations through in situ observation and Synthetic Aperture Radar methods. Remote Sens. Environ. 2020, 248, 111978. [Google Scholar] [CrossRef]
- Lu, D.; Chen, Q.; Wang, G.; Liu, L.; Li, G.; Moran, E. A survey of remote sensing-based aboveground biomass estimation methods in forest ecosystems. Int. J. Digit. Earth 2016, 9, 63–105. [Google Scholar] [CrossRef]
- Kankare, V.; Vauhkonen, J.; Tanhuanpää, T.; Holopainen, M.; Vastaranta, M.; Joensuu, M.; Krooks, A.; Hyyppä, J.; Hyyppä, H.; Alho, P.; et al. Accuracy in estimation of timber assortments and stem distribution—A comparison of airborne and terrestrial laser scanning techniques. ISPRS J. Photogramm. Remote Sens. 2014, 97, 89–97. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Maselli, F.; Chiesi, M.; Montaghi, A.; Pranzini, E. Use of ETM+ images to extend stem volume estimates obtained from LiDAR data. ISPRS J. Photogramm. Remote Sens. 2011, 66, 662–671. [Google Scholar] [CrossRef]
- Ortiz-Reyes, A.D.; Valdez-Lazalde, J.R.; De Los Santos-Posadas, H.M.; Ángeles-Pérez, G.; Paz-Pellat, F.; Martínez-Trinidad, T. Inventory and cartography of forest variables derived from LiDAR data: Comparison of methods. Madera Y Y Bosques 2015, 21, 111–128. [Google Scholar]
- Bremer, M.; Rutzinger, M.; Wichmann, V. Derivation of tree skeletons and error assessment using LiDAR point cloud data of varying quality. ISPRS J. Photogramm. Remote Sens. 2013, 80, 39–50. [Google Scholar] [CrossRef]
- Mokroš, M.; Mikita, T.; Singh, A.; Tomaštík, J.; Chudá, J.; Wężyk, P.; Kuželka, K.; Surový, P.; Klimánek, M.; Zięba-Kulawik, K.; et al. Novel low-cost mobile mapping systems for forest inventories as terrestrial laser scanning alternatives. Int. J. Appl. Earth Obs. Geoinformation ITC J. 2021, 104, 102512. [Google Scholar] [CrossRef]


| Description of the Keywords | |||
|---|---|---|---|
| N° | Keyword | Description | Source |
| 1 | Remote sensing (RS) | It is the science that remotely captures information from the Earth’s surface for many scopes (i.e., forest monitoring). | (a) |
| 2 | LiDAR | It is a technology suitable for depicting vertical and horizontal canopy profiles through georeferenced points, performed by measuring the distance of an emitted and backscattered light from the LiDAR sensor and tree. | (a) |
| 3 | Forest or Woodland | ‘Forest’ is land covered by more than 0.5 ha of trees that can reach a minimum of 5 m of height, and land which possesses a canopy cover of more than 10%. ‘Woodland’ is land covered by more than 0.5 ha of trees that can reach 5 m of height at maturity, which also possess a canopy cover of 5–10%; or land covered by a combined cover of shrubs, bushes, and trees with a canopy cover above 10%. | (b) |
| 4 | Timber or Wood | ‘Timber’ and ‘wood’ are some of the most important goods provided by forests, and they play an important role in the wood supply chain. | (a) |
| 5 | Stem or Branch | ‘Stem’ is the aboveground trunk of a vascular plant with similar anatomical properties, while ‘branch’ is the woody part of the tree arising from a trunk. | [5] |
| 6 | Hardwood or Softwood | ‘Hardwood’ is commonly associated with deciduous stands (denser wood), while ‘softwood’ is often associated with coniferous stands (less dense wood). | (a) |
| 7 | Tree | It indicates a tall plant that is composed of a trunk and branches. Moreover, it is a principal component of both forest and woodland areas. | (b) |
| 8 | Quality or Assortment | ‘Quality’ groups physical and chemical characteristics widely used for classifying wood based on specific wood features; the ‘assortment’ term is often used to characterize the log of trees according to a merchantable approach. | (b) |
| 9 | Morphology | This represents the physical form and external structure of trees. This word allowed us to collect papers that considered the morphology of the tree as objective. | (a) |
| 10 | Volume or Merchant * | These words allowed us to collect papers that considered the wood in forest productivity and the commercial terms as the target. | [5] |
| Abbreviation | Code |
|---|---|
| SC1 | remote AND sensing *; lidar; forest * OR woodland; timber OR wood AND quality |
| SC2 | remote AND sensing *; lidar; forest * OR woodland; timber OR wood AND assortment * |
| SC3 | remote AND sensing *; lidar; forest * OR woodland; timber OR wood AND morphology |
| SC4 | remote AND sensing *; lidar; forest * OR woodland; timber OR wood AND volume |
| SC5 | remote AND sensing *; lidar; forest * OR woodland; stem OR branch AND volume |
| SC6 | remote AND sensing *; lidar; forest * OR woodland; stem OR branch AND morphology |
| SC7 | remote AND sensing *; lidar; forest * OR woodland; hardwood OR softwood AND merchant * |
| SC8 | remote AND sensing *; lidar; forest * OR woodland; tree AND morphology |
| SC9 | remote AND sensing *; lidar; forest * OR woodland; tree AND merchant * |
| SC10 | remote AND sensing *; lidar; forest * OR woodland; tree AND assortment * |
| SC11 | remote AND sensing *; lidar; forest * OR woodland; tree AND quality |
| SC12 | remote AND sensing *; lidar; forest * OR woodland; tree AND volume |
| LiDAR Systems | |
|---|---|
| ID | Descriptions |
| 1 | No specified systems * |
| 2 | Only terrestrial LiDAR systems |
| 3 | Only airborne LiDAR systems |
| 4 | Only satellite LiDAR systems |
| 5 | Only terrestrial images |
| 6 | Only airborne images |
| 7 | Only satellite images |
| 8 | Combination of terrestrial with airborne LiDAR systems |
| 9 | Combination of terrestrial with satellite LiDAR systems |
| 10 | Combination of terrestrial LiDAR systems with airborne images |
| 11 | Combination of airborne LiDAR systems with airborne images |
| 12 | Combination of airborne LiDAR systems with satellite images |
| 13 | Combination of satellite LiDAR systems with satellite images |
| 14 | Combination of terrestrial LiDAR systems with terrestrial images |
| 15 | Combination of airborne LiDAR systems with terrestrial images |
| 16 | Combination of terrestrial LiDAR systems with satellite images |
| 17 | Combination of airborne LiDAR systems with airborne and satellite images |
| 18 | Combination of satellite images with airborne and satellite LiDAR systems |
| 19 | Combination of airborne images with terrestrial and airborne LiDAR systems |
| 20 | Combination of terrestrial images with terrestrial and airborne LiDAR systems |
| Paper Collection | |
|---|---|
| Abbreviation | N° collected papers |
| SC1 | 22 |
| SC2 | 3 |
| SC3 | 6 |
| SC4 | 76 |
| SC5 | 82 |
| SC6 | 11 |
| SC7 | 6 |
| SC8 | 29 |
| SC9 | 2 |
| SC10 | 3 |
| SC11 | 84 |
| SC12 | 167 |
| Sub-total | 491 |
| N° duplicated papers | 187 |
| Total | 304 |
| Forest Type | N° Papers | Total |
|---|---|---|
| Pure Coniferous | 86 | 128 |
| Pure Deciduous | 42 | |
| Mixed | 155 | 155 |
| Total | 283 | |
| Literature Review | ||||
|---|---|---|---|---|
| LiDAR Systems | Type of Approach | Tree Measurements | Modelling | Reference |
| ALS | ABA | Timber assortments volume (i.e., sawlogs, pulpwood, grade A butt logs, and small-diameter logs) | k-most similar neighbour (K-MSN), species-specific taper curve models | [84] |
| ALS | ABA | Timber merchantable volume (i.e., sawlogs, and pulpwood) | ‘randomForest’ R package | [44,45] |
| ALS | ITD | FIVs (i.e., TH, DBH, AGB) | Ordinary linear fixed-effects models (‘lme4’ R package); ‘FindTreeCHM’, ‘ForestCAS’ and ‘CrownMetrics’ functions embedded in ‘rLiDAR’ packages | [86] |
| ALS | ABA vs. ITD | FIVs (i.e., stem volume) | Artificial neural network, random forest, support vector machine, linear and Gompertz models, and recursive feature elimination. | [87] |
| ALS | ABA | FIVs (i.e., stem volume) | FUSION/LDV, principal component analysis (PCA), multiple linear regression, machine learning algorithms (‘randomForest’, ‘yaImpute’, ‘e1071’, ‘nnet’ R packages) | [83] |
| ALS | ITD | FIVs (i.e., stem volume and BA) | Multiple linear regression model | [64] |
| ALS | ITD | Single tree branch biomass | Random Forests and Linear least squares in stepwise linear regression | [88] |
| UAS | ITD | FIVs (i.e., AGB) | ‘grid_metrics’ and ‘find_trees’ functions embedded in the ‘lidR’ R package | [89] |
| UAS | ITD | Tree detection | Method developed by Lim et al. ([90]), peak detection on 2D layers | [90] |
| TLS | 2D and 3D methodologies | Stem position and FIVs (i.e., DBH) | ‘find trunks’ algorithm | [68] |
| TLS | 2D and 3D methodologies | FIVs (i.e., DBH) for surrogate plots, number of branches, tree crown measurements, total knot surface, and stem taper | ‘L-Architect’ algorithm, PlantGL python-based library | [78] |
| TLS | 2D and 3D methodologies | Tree crown measurements and FIVs (i.e., TH) | cross-sectional slicing | [69] |
| TLS | 2D and 3D methodologies | Stem volume, stem curve, and FIVs (i.e., TH) | Cylinder-fitting algorithm, Huber’s formula | [31] |
| TLS and PLS | 2D and 3D methodologies | Stem curve and stem volume, stem position, and FIVs (i.e., DBH) | LiDAR360 software and six different taper equations, processed by nonlinear mixed models | [81,85] |
| PLS | 2D and 3D methodologies | Timber volume for stems and small/large branches (±1 cm of ϕ) | Voxel-based approach (0.5 m3 of threshold) | [71] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alvites, C.; Marchetti, M.; Lasserre, B.; Santopuoli, G. LiDAR as a Tool for Assessing Timber Assortments: A Systematic Literature Review. Remote Sens. 2022, 14, 4466. https://doi.org/10.3390/rs14184466
Alvites C, Marchetti M, Lasserre B, Santopuoli G. LiDAR as a Tool for Assessing Timber Assortments: A Systematic Literature Review. Remote Sensing. 2022; 14(18):4466. https://doi.org/10.3390/rs14184466
Chicago/Turabian StyleAlvites, Cesar, Marco Marchetti, Bruno Lasserre, and Giovanni Santopuoli. 2022. "LiDAR as a Tool for Assessing Timber Assortments: A Systematic Literature Review" Remote Sensing 14, no. 18: 4466. https://doi.org/10.3390/rs14184466
APA StyleAlvites, C., Marchetti, M., Lasserre, B., & Santopuoli, G. (2022). LiDAR as a Tool for Assessing Timber Assortments: A Systematic Literature Review. Remote Sensing, 14(18), 4466. https://doi.org/10.3390/rs14184466