
Examining the Role of UAV Lidar Data in Improving Tree Volume Calculation Accuracy


Abstract
:1. Introduction
2. Materials and Methods
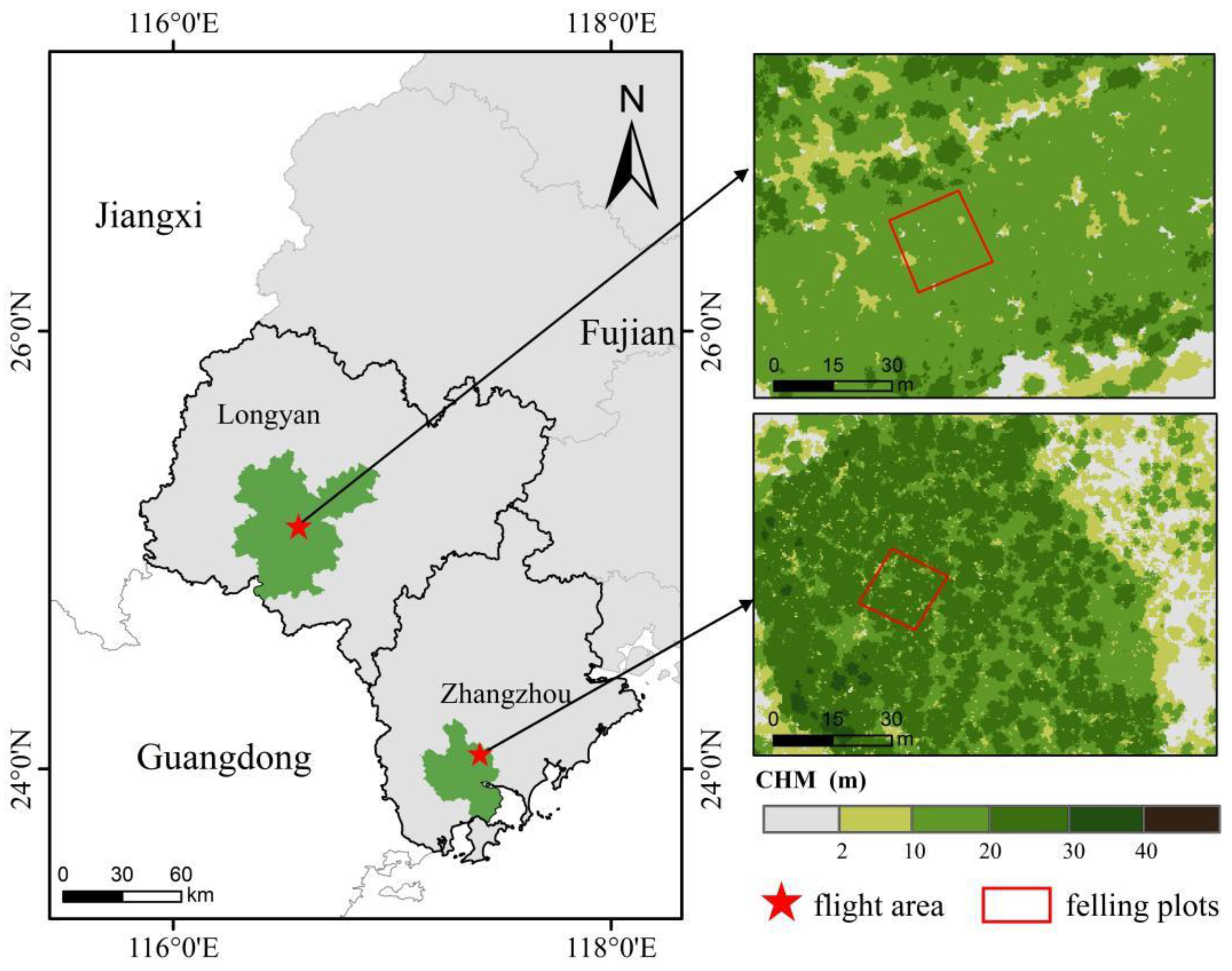
2.1. Study Area
2.2. Field Measurements of Individual Trees
2.3. Collection of UAV Lidar Data and Extraction of Individual Tree Heights
2.4. Evaluation of Tree Height Measurement Results
2.5. Calculation of Tree Volumes for Different Tree Species
2.6. Impacts of Tree Height on Tree Volume Calculation
3. Results
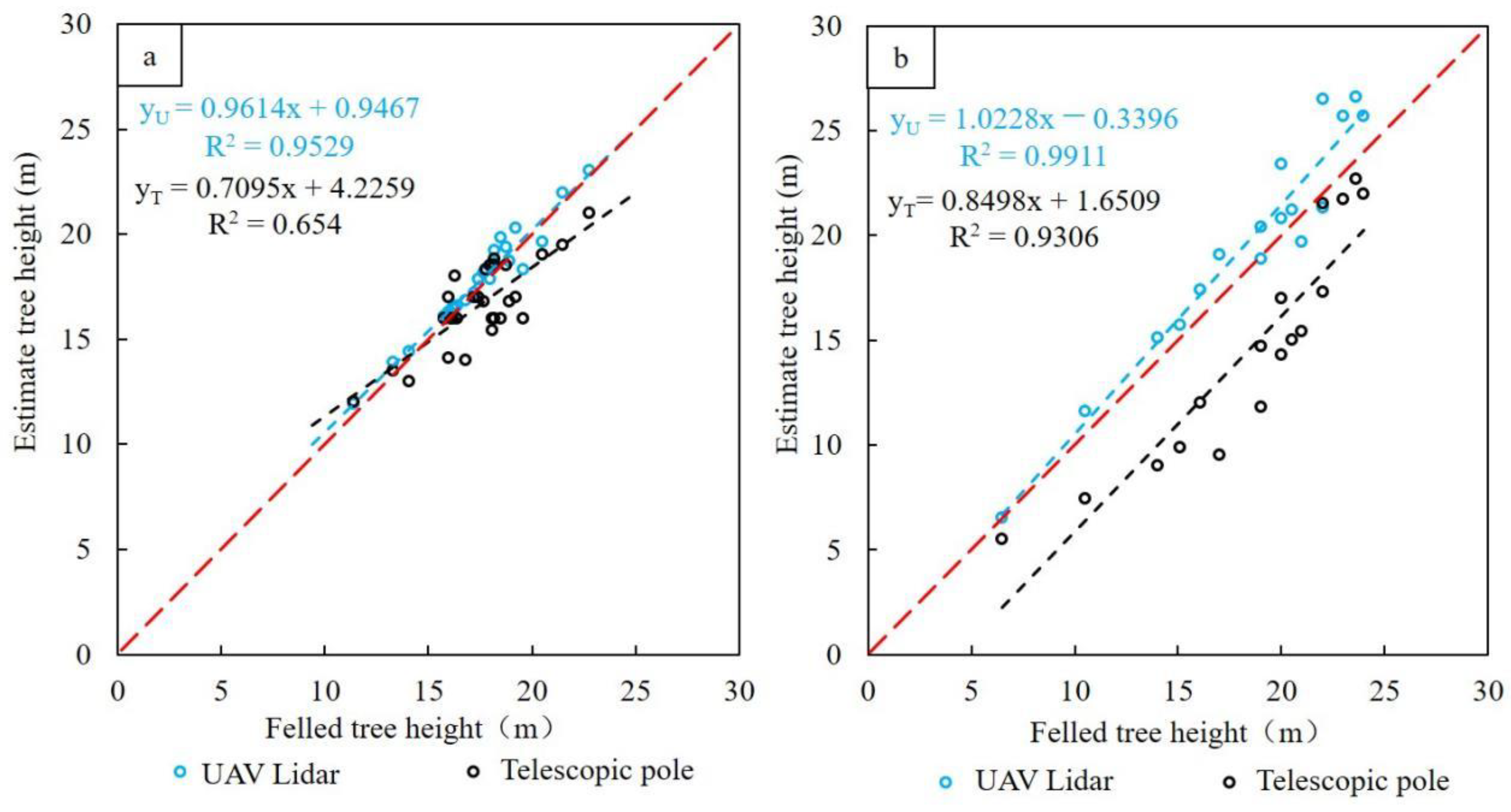
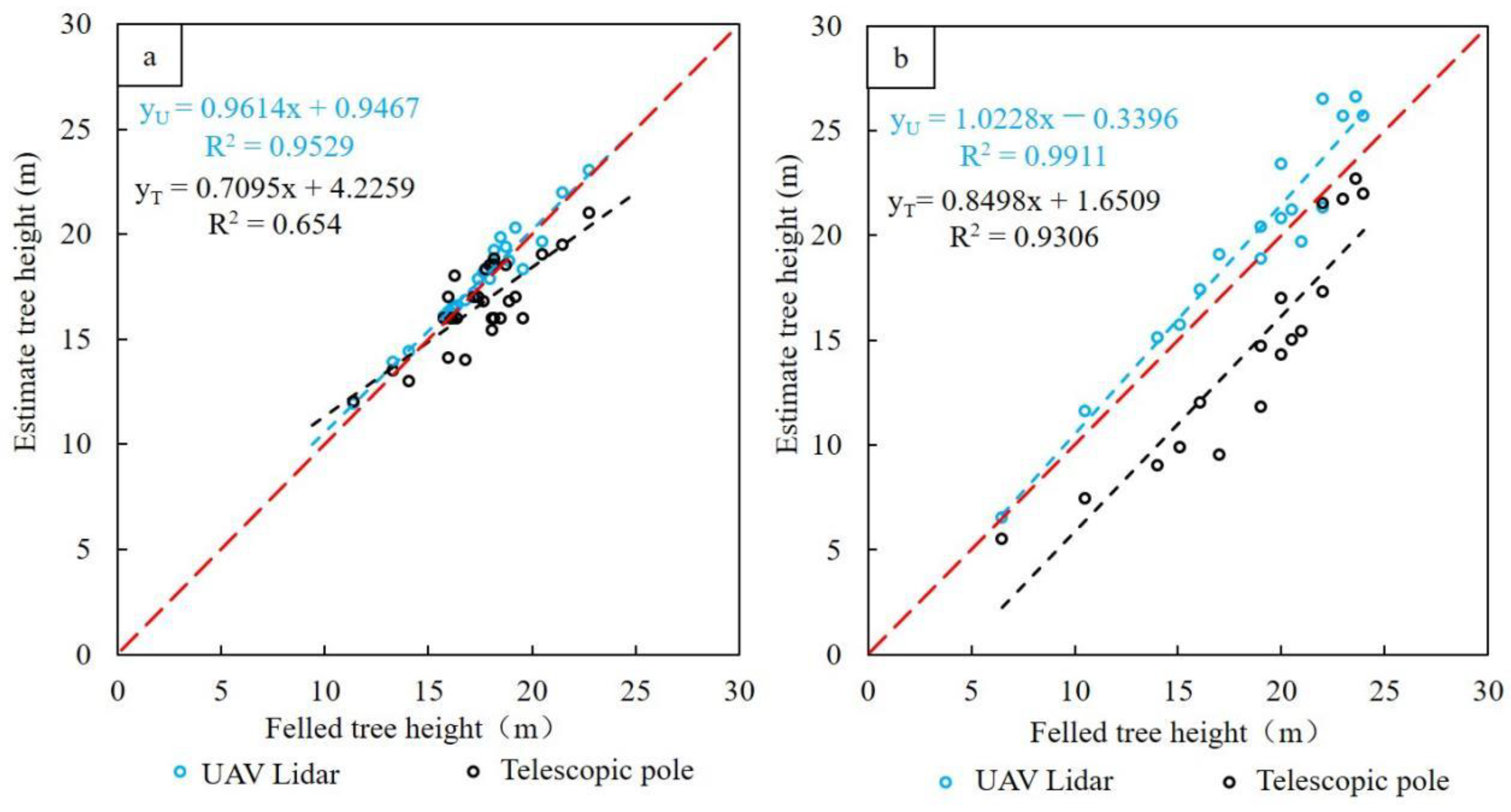
3.1. Comparative Analysis of Tree Heights Measured Using Different Approaches
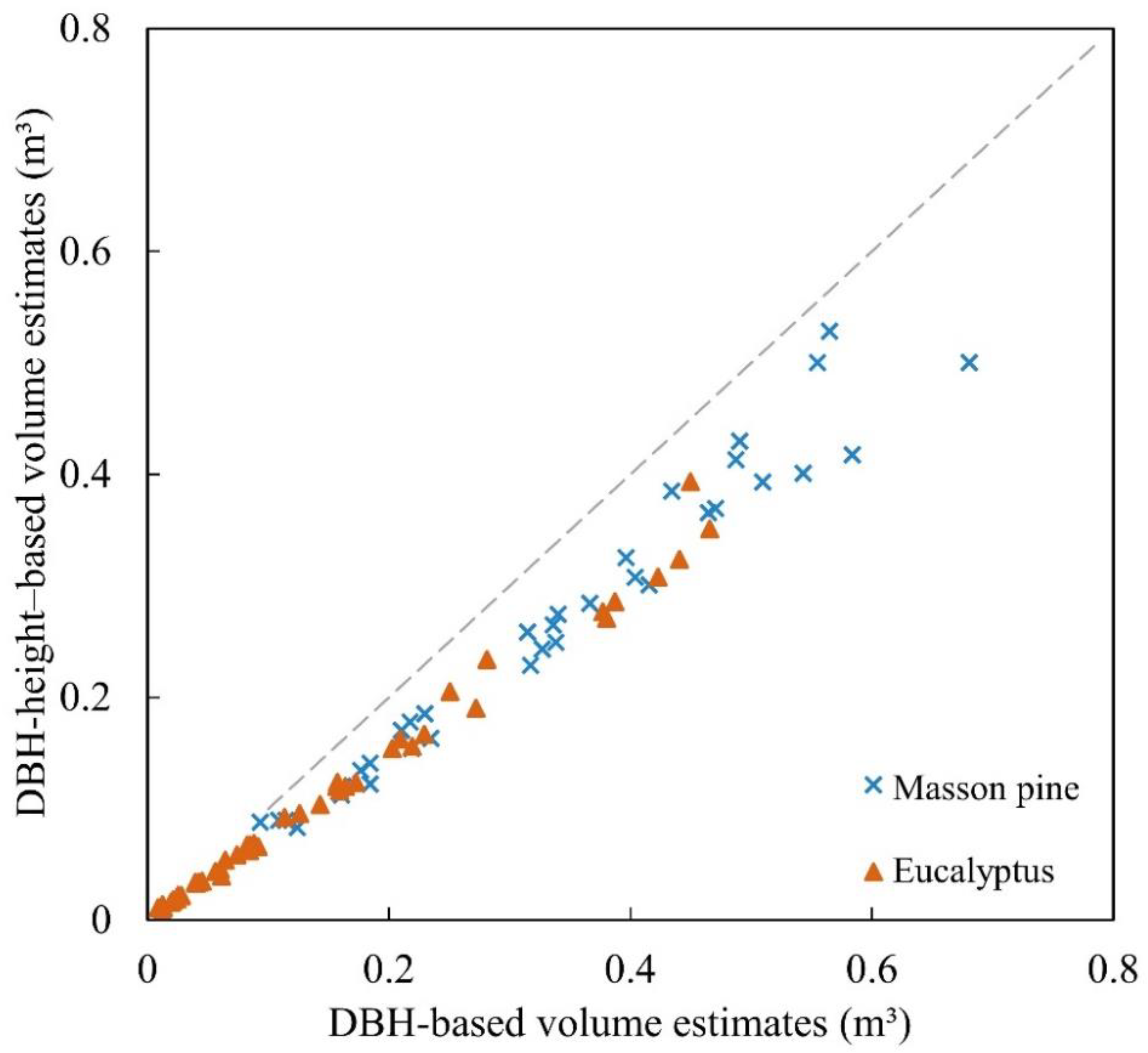
3.2. Impacts of Different Allometric Equations on Calculation Accuracies of Single-Tree Volumes
3.3. Impacts of Tree Height Measurement Approaches on the Calculation Accuracies of Tree Volumes
4. Discussion
4.1. The Importance of Obtaining Accurate Tree Heights
4.2. The Importance of Using DBH–Height-Based Allometric Equations to Improve Tree Volume Calculation Accuracy
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mayamanikandan, T.; Reddy, S.; Fararoda, R.; Thumaty, K.C.; Praveen, M.S.S.; Rajashekar, G.; Gummapu, J.; Jha, C.S.; Das, I.C. Quantifying the Influence of Plot-Level Uncertainty in Above Ground Biomass Up Scaling Using Remote Sensing Data in Central Indian Dry Deciduous Forest. Geocarto Int. 2020, 37, 3489–3503. [Google Scholar] [CrossRef]
- González-Jaramillo, V.; Fries, A.; Zeilinger, J.; Homeier, J.; Paladines-Benitez, J.; Bendix, J. Estimation of Above-Ground Biomass in a Tropical Mountain Forest in Southern Ecuador Using Airborne Lidar Data. Remote Sens. 2018, 10, 660. [Google Scholar] [CrossRef]
- Schlund, M.; Davidson, M. Aboveground Forest Biomass Estimation Combining L- and P-Band SAR Acquisitions. Remote Sens. 2018, 10, 1151. [Google Scholar] [CrossRef]
- Tello, M.; Cazcarra-Bes, V.; Pardini, M.; Papathanassiou, K. Forest Structure Characterization from SAR Tomography at L-Band. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3402–3414. [Google Scholar] [CrossRef]
- Chen, B.; Pang, Y.; Li, Z.; North, P.; Rosette, J.; Sun, G.; Lu, H.; Suárez, J.; Bye, I. Potential of Forest Parameter Estimation Using Metrics from Photon Counting Lidar Data in Howland Research Forest. Remote Sens. 2019, 11, 856. [Google Scholar] [CrossRef]
- Lin, W.; Lu, Y.; Li, G.; Jiang, X.; Lu, D. A Comparative Analysis of Modeling Approaches and Canopy Height-Based Data Sources for Mapping Forest Growing Stock Volume in A Northern Subtropical Ecosystem of China. GIsci. Remote Sens. 2022, 59, 568–589. [Google Scholar] [CrossRef]
- Schepaschenko, D.; Chave, J.; Phillips, O.L.; Lewis, S.L.; Davies, S.J.; Réjou-Méchain, M.; Sist, P.; Scipal, K.; Perger, C.; Herault, B.; et al. The Forest Observation System, Building A Global Reference Dataset for Remote Sensing of Forest Biomass. Sci. Data 2019, 6, 198. [Google Scholar] [CrossRef] [PubMed]
- Hu, Y.; Xu, X.; Wu, F.; Sun, Z.; Xia, H.; Meng, Q.; Xiao, X.; Huang, W.; Zhou, H.; Gao, J.; et al. Estimating Forest Stock Volume in Hunan Province, China, by Integrating In Situ Plot Data, Sentinel-2 Images, and Linear and Machine Learning Regression Models. Remote Sens. 2020, 12, 186. [Google Scholar] [CrossRef]
- Chang, K. Conversion of Double-Entry Tree Volume Table to Single-Entry Volume Table. Forest Resour. Manag. 1977, 1, 1–10. (In Chinese) [Google Scholar]
- Zeng, W. Discussion on Volume Estimation in Continuous Forest Inventory in China. Cent. South For. Invent. Plan. 2007, 2, 1–3+6. (In Chinese) [Google Scholar]
- Li, Q. Developing Stand-Level Model of Stock Volume, Total Biomass and Carbon Storage for Larch Plantations in Heilongjiang Province. For. Res. Manag. 2017, 74–77. [Google Scholar]
- Liu, J.; Feng, Z.; Mannan, A.; Khan, T.U.; Cheng, Z. Comparing Non-Destructive Methods to Estimate Volume of Three Tree Taxa in Beijing, China. Forests 2019, 10, 92. [Google Scholar] [CrossRef]
- Zeng, W.; Yang, X.; Chen, X. Comparison on prediction precision of one-variable and two-variable volume models on tree-level and stand-level. Cent. South For. Invent. Plann. 2017, 36, 1–6. (In Chinese) [Google Scholar]
- He, C. The Key Technology for Precision Measurement in Forest Surveying. Ph.D. Dissertation, Beijing Forestry University, Beijing, China, 2013. [Google Scholar]
- Phalla, T.; Ota, T.; Mizoue, N.; Kajisa, T.; Yoshida, S.; Vuthy, M.; Heng, S. The Importance of Tree Height in Estimating Individual Tree Biomass While Considering Errors in Measurements and Allometric Models. AGRIVITA, J. Agric. Sci. 2017, 40, 131–140. [Google Scholar] [CrossRef] [Green Version]
- Jurjević, L.; Liang, X.; Gašparović, M.; Balenović, I. Is Field-Measured Tree Height as Reliable as Believed–Part II, A Comparison Study of Tree Height Estimates from Conventional Field Measurement and Low-Cost Close-Range Remote Sensing in A Deciduous Forest. ISPRS J. Photogramm. Remote Sens. 2020, 169, 227–241. [Google Scholar] [CrossRef]
- Sibona, E.; Vitali, A.; Meloni, F.; Caffo, L.; Dotta, A.; Lingua, E.; Garbarino, M.; Motta, R. Direct Measurement of Tree Height Provides Different Results on the Assessment of Lidar Accuracy. Forests 2016, 8, 7. [Google Scholar] [CrossRef]
- Queinnec, M.; Coops, N.C.; White, J.C.; McCartney, G.; Sinclair, I. Developing A Forest Inventory Approach Using Airborne Single Photon Lidar Data: From Ground Plot Selection to Forest Attribute Prediction. For. Int. J. For. Res. 2022, 95, 347–362. [Google Scholar] [CrossRef]
- White, J.C.; Tompalski, P.; Vastaranta, M.; Wulder, M.A.; Saarinen, N.; Stepper, C.; Coops, N.C. A Model Development and Application Guide for Generating an Enhanced Forest Inventory Using Airborne Laser Scanning Data and an Area-Based Approach; Information Report FI-X-018; Natural Resources Canada, Canadian Forest Service, Canadian Wood Fibre Centre: Victoria, BC, Canada, 2017. [Google Scholar]
- Latifi, H.; Heurich, M.; Hartig, F.; Müller, J.; Krzystek, P.; Jehl, H.; Dech, S. Estimating Over- and Understorey Canopy Density of Temperate Mixed Stands by Airborne LiDAR Data. For. Int. J. For. Res. 2016, 89, 69–81. [Google Scholar] [CrossRef]
- Mielcarek, M.; Stereńczak, K.; Khosravipour, A. Testing and Evaluating Different Lidar-Derived Canopy Height Model Generation Methods for Tree Height Estimation. Int. J. Appl. Earth Obs. 2018, 71, 132–143. [Google Scholar] [CrossRef]
- Hernández-Stefanoni, J.L.; Dupuy, J.M.; Johnson, K.D.; Birdsey, R.; Tun-Dzul, F.; Peduzzi, A.; López-Merlín, D. Improving Species Diversity and Biomass Estimates of Tropical Dry Forests Using Airborne LiDAR. Remote Sens. 2014, 6, 4741–4763. [Google Scholar] [CrossRef]
- Jiang, X.; Li, G.; Lu, D.; Chen, E.; Wei, X. Stratification-Based Forest Aboveground Biomass Estimation in a Subtropical Region Using Airborne Lidar Data. Remote Sens. 2020, 12, 1101. [Google Scholar] [CrossRef]
- Chianucci, F.; Disperati, L.; Guzzi, D.; Bianchini, D.; Nardino, V.; Lastri, C.; Rindinella, A.; Corona, P. Estimation of Canopy Attributes in Beech Forests Using True Colour Digital Images from a Small Fixed-Wing UAV. Int. J. Appl. Earth Obs. Geoinf. 2016, 47, 60–68. [Google Scholar] [CrossRef]
- Dainelli, R.; Toscano, P.; Di Gennaro, S.F.; Matese, A. Recent Advances in Unmanned Aerial Vehicle Forest Remote Sensing—A Systematic Review. Part I: A General Framework. Forests 2021, 12, 327. [Google Scholar] [CrossRef]
- Dainelli, R.; Toscano, P.; Di Gennaro, S.F.; Matese, A. Recent Advances in Unmanned Aerial Vehicles Forest Remote Sensing—A Systematic Review. Part II: Research Applications. Forests 2021, 12, 397. [Google Scholar] [CrossRef]
- Dalla Corte, A.P.; Rex, F.E.; Almeida, D.R.; Sanquetta, C.R.; Silva, C.A.; Moura, M.M.; Wilkinson, B.; Zambrano, A.M.A.; da Cunha Neto, E.M.; Veras, H.F.P.; et al. Measuring Individual Tree Diameter and Height Using GatorEye High-Density UAV-Lidar in an Integrated Crop-Livestock-Forest System. Remote Sens. 2020, 12, 863. [Google Scholar] [CrossRef]
- Hartley, R.J.; Leonardo, E.M.; Massam, P.; Watt, M.S.; Estarija, H.J.; Wright, L.; Pearse, G.D.; Melia, N. An Assessment of High-Density UAV Point Clouds for the Measurement of Young Forestry Trials. Remote Sens. 2020, 12, 4039. [Google Scholar] [CrossRef]
- Cunha Neto, E.M.; Rex, F.E.; Veras, H.F.P.; Moura, M.M.; Sanquetta, C.R.; Käfer, P.S.; Sanquetta, M.N.I.; Zambrano, A.M.A.; Broadbent, E.N.; Corte, A.P.D. Using high-density UAV-LiDAR for deriving tree height of Araucaria Angustifolia in an Urban Atlantic Rain Forest. Urban For. Urban Green. 2021, 63, 127197. [Google Scholar] [CrossRef]
- Chen, Q.; Wang, X.; Hang, M.; Li, J. Research on the Improvement of Single Tree Segmentation Algorithm Based on Airborne Lidar Point Cloud. Open Geosci. 2021, 13, 705–716. [Google Scholar] [CrossRef]
- Hu, B.; Li, J.; Jing, L.; Judah, A. Improving the Efficiency and Accuracy of Individual Tree Crown Delineation from High-Density Lidar Data. Int. J. Appl. Earth. Obs. 2014, 26, 145–155. [Google Scholar] [CrossRef]
- Dai, W.; Yang, B.; Dong, Z.; Shaker, A. A New Method for 3D Individual Tree Extraction Using Multispectral Airborne Lidar Point Clouds. ISPRS J. Photogramm. Remote Sens. 2018, 144, 400–411. [Google Scholar] [CrossRef]
- Holmgren, J.; Lindberg, E. Tree Crown Segmentation Based on A Tree Crown Density Model Derived from Airborne Laser Scanning. Remote Sens. Lett. 2019, 10, 1143–1152. [Google Scholar] [CrossRef]
- Liu, H.; Dong, P.; Wu, C.; Wang, P.; Fang, M. Individual Tree Identification Using A New Cluster-Based Approach with Discrete-Return Airborne Lidar Data. Remote Sens. Environ. 2021, 258, 112382. [Google Scholar] [CrossRef]
- Man, Q.; Dong, P.; Yang, X.; Wu, Q.; Han, R. Automatic Extraction of Grasses and Individual Trees in Urban Areas Based on Airborne Hyperspectral and Lidar Data. Remote Sens. 2020, 12, 2725. [Google Scholar] [CrossRef]
- Peng, X.; Zhao, A.; Chen, Y.; Chen, Q.; Liu, H. Tree Height Measurements in Degraded Tropical Forests Based on UAV-Lidar Data of Different Point Cloud Densities: A Case Study on Dacrydium pierrei in China. Forests 2021, 12, 328. [Google Scholar] [CrossRef]
- Chen, Q.; Baldocchi, D.; Gong, P.; Kelly, M. Isolating Individual Trees in a Savanna Woodland Using Small Footprint Lidar Data. Photogramm. Eng. Remote Sens. 2006, 72, 923–932. [Google Scholar] [CrossRef]
- Guo, Y.S.; Liu, Q.S.; Liu, G.H.; Huang, C. Individual Tree Crown Extraction of High Resolution Image Based on Marker-Controlled Watershed Segmentation Method. J. Geogr. Inf. Sci. 2016, 18, 1259–1266. [Google Scholar]
- Huang, H.; Li, X.; Chen, C. Individual Tree Crown Detection and Delineation from Very-High-Resolution UAV Images Based on Bias Field and Marker-Controlled Watershed Segmentation Algorithms. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2253–2262. [Google Scholar] [CrossRef]
- Gimenez, B.O.; Dos Santos, L.T.; Gebara, J.; Celes, C.H.S.; Durgante, F.M.; Lima, A.J.N.; Dos Santos, J.; Higuchi, N. Tree Climbing Techniques and Volume Equations for Eschweilera (Matá-Matá), a Hyperdominant Genus in the Amazon Forest. Forests 2017, 8, 154. [Google Scholar] [CrossRef]
- Liao, Z. Studies of the Volume Table and Stocking Table Compilations of Eucalyptus Plantations. J. Fujian For. Sci. Tech. 2005, 2, 17–20. (In Chinese) [Google Scholar]
- LY/T 2263-2104; Tree Biomass Models and Related Parameters to Carbon Accounting for Pinus Massoniana (The Forestry Industry Standards of the People’s Republic of China). Standards Press of China: Beijing, China, 2014.
- Stereńczak, K.; Mielcarek, M.; Wertz, B.; Bronisz, K.; Zajączkowski, G.; Jagodziński, A.M.; Skorupski, M.; Ochał, W. Factors Influencing the Accuracy of Ground-Based Tree-Height Measurements for Major European Tree Species. J. Environ. Manag. 2019, 231, 1284–1292. [Google Scholar] [CrossRef]
- Howe, G.T.; Adams, W.T. Clinometer Versus Pole Measurement of Tree Heights in Young Douglas-fir Progeny Tests. West J. Appl. For. 1988, 3, 86–88. [Google Scholar] [CrossRef]
- Bell, J.F.; Gourley, R. Assessing the Accuracy of a Sectional Pole, Haga Altimeter, and Alti-Level for Determining Total Height of Young Coniferous Stands. South J. Appl. For. 1980, 4, 136–138. [Google Scholar] [CrossRef]
- Ganz, S.; Käber, Y.; Adler, P. Measuring Tree Height with Remote Sensing—A Comparison of Photogrammetric and Lidar Data with Different Field Measurements. Forests 2019, 10, 694. [Google Scholar] [CrossRef]
- Wang, Y.; Lehtomäki, M.; Liang, X.; Pyörälä, J.; Kukko, A.; Jaakkola, A.; Hyyppä, J.; Liu, J.; Feng, Z.; Chen, R. Is Field-Measured Tree Height as Reliable as Believed—A Comparison Study of Tree Height Estimates from Field Measurement, Airborne Laser Scanning and Terrestrial Laser Scanning in a Boreal Forest. ISPRS J. Photogramm. Remote Sens. 2019, 147, 132–145. [Google Scholar] [CrossRef]
- Xu, D.; Wang, H.; Xu, W.; Luan, Z.; Xu, X. Lidar Applications to Estimate Forest Biomass at Individual Tree Scale: Opportunities, challenges and future perspectives. Forests 2021, 12, 550. [Google Scholar] [CrossRef]
- Moundounga Mavouroulou, Q.; Ngomanda, A.; Engone Obiang, N.L.; Lebamba, J.; Gomat, H.; Mankou, G.S.; Picard, N.; Loumeto, J.; Iponga, D.M.; Ditsouga, F.K.; et al. How to Improve Allometric Equations to Estimate Forest Biomass Stocks? Some Hints from A Central African Forest. Can. J. For. Res 2014, 44, 685–691. [Google Scholar] [CrossRef]
- Vorster, A.G.; Evangelista, P.H.; Stovall, A.E.; Ex, S. Variability and Uncertainty in Forest Biomass Estimates from the Tree to Landscape Scale: The Role of Allometric Equations. Carbon Balance Manag. 2020, 15, 1–20. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
| Plot | Number of All Trees within the Plot | Number of Trees Measured with the Telescopic Pole | Number of Felled Trees | DBH of Felled Trees (cm) | Height of Felled Trees (m) |
|---|---|---|---|---|---|
| Eucalyptus | 51 | 17 | 50 | 5.1–25.2 | 6.5–26.6 |
| Masson pine | 37 | 30 | 35 | 13.1–27.6 | 11.4–22.8 |
| Tree Specie | Allometric Equation | a | b | c | Reference |
|---|---|---|---|---|---|
| Eucalyptus | DBH-based | 0.00019854 | 2.35261 | ||
| DBH–height-based | 0.000071748 | 1.897944 | 0.839915 | [41] | |
| Masson pine | DBH-based | 0.00013881 | 2.48492 | ||
| DBH–height-based | 0.000066937 | 1.941140 | 0.90485 | [42] |
| Role of Height | Allometric Equation | Description |
|---|---|---|
| Using height or not | DBH-based equation vs. DBH–height-based equation by using reference height | Understanding the role of tree height variable in improving calculation accuracy of single-tree volume |
| Using the measurement methods to obtain tree height |
| Understanding the impacts of different tree height measurement methods on calculation accuracy of single-tree volume |
| Forest Type | Number of Trees | Telescopic Pole vs. Felled Tree | Lidar vs. Felled Tree | ||
|---|---|---|---|---|---|
| Bias (m) (Bias%) | RMSE (m) (RMSEr%) | Bias (m) (Bias%) | RMSE (m) (RMSEr%) | ||
| Masson pine | 30 | −0.84 (−4.8%) | 1.57 (9.0%) | 0.27 (1.6%) | 0.56 (3.2%) |
| Eucalyptus | 17 | −1.31 (−6.7%) | 1.96 (9.9%) | 0.11 (0.6%) | 0.54 (2.7%) |
| Height Range (m) | Masson Pine | Eucalyptus | ||||||
|---|---|---|---|---|---|---|---|---|
| Lidar vs. Felled Tree | Tepo vs. Felled Tree | Lidar vs. Felled Tree | Tepo vs. Felled Tree | |||||
| RMSE (m) | RMSEr (%) | RMSE (m) | RMSEr (%) | RMSE (m) | RMSEr (%) | RMSE (m) | RMSEr (%) | |
| ≤18 | 0.33 | 2.1% | 1.05 | 6.6% | 0.30 | 2.28% | 0.96 | 7.26% |
| >18 | 0.76 | 3.9% | 2.06 | 10.7% | 0.61 | 2.70% | 2.25 | 10.0% |
| Forest Type | Number of Trees | Bias (m3) (Bias%) | RMSE (m3) (RMSEr (%)) |
|---|---|---|---|
| Masson pine | 35 | −0.071 (−21.18%) | 0.081 (24.04%) |
| Eucalyptus | 50 | −0.034 (−23.86%) | 0.048 (33.90%) |
| Forest Type | Number of Trees | Telescopic Pole vs. Felled Tree | Lidar vs. Felled Tree | ||
|---|---|---|---|---|---|
| Bias (m3) (Bias%) | RMSE (m3) (RMSEr%) | Bias (m3) (Bias%) | RMSE (m3) (RMSEr%) | ||
| Pine | 30 | −0.014 (−4.9%) | 0.025 (9.13%) | 0.004 (1.36%) | 0.010 (3.40%) |
| Eucalyptus | 17 | −0.012 (−6.66%) | 0.021 (11.81%) | 0.002 (0.86%) | 0.004 (2.35%) |
| Height Range (m) | Masson Pine | Eucalyptus | ||||||
|---|---|---|---|---|---|---|---|---|
| Lidar vs. Felled Tree | Tepo vs. Felled Tree | Lidar vs. Felled Tree | Tepo vs. Felled Tree | |||||
| RMSE (m3) | RMSEr (%) | RMSE (m3) | RMSEr (%) | RMSE (m3) | RMSEr (%) | RMSE (m3) | RMSEr (%) | |
| ≤18 | 0.005 | 2.31% | 0.011 | 5.14% | 0.001 | 2.19% | 0.003 | 6.82% |
| >18 | 0.013 | 3.59% | 0.036 | 9.9% | 0.005 | 2.12% | 0.024 | 10.70% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liao, K.; Li, Y.; Zou, B.; Li, D.; Lu, D. Examining the Role of UAV Lidar Data in Improving Tree Volume Calculation Accuracy. Remote Sens. 2022, 14, 4410. https://doi.org/10.3390/rs14174410
Liao K, Li Y, Zou B, Li D, Lu D. Examining the Role of UAV Lidar Data in Improving Tree Volume Calculation Accuracy. Remote Sensing. 2022; 14(17):4410. https://doi.org/10.3390/rs14174410
Chicago/Turabian StyleLiao, Kuo, Yunhe Li, Bingzhang Zou, Dengqiu Li, and Dengsheng Lu. 2022. "Examining the Role of UAV Lidar Data in Improving Tree Volume Calculation Accuracy" Remote Sensing 14, no. 17: 4410. https://doi.org/10.3390/rs14174410
APA StyleLiao, K., Li, Y., Zou, B., Li, D., & Lu, D. (2022). Examining the Role of UAV Lidar Data in Improving Tree Volume Calculation Accuracy. Remote Sensing, 14(17), 4410. https://doi.org/10.3390/rs14174410