
Rice Height Monitoring between Different Estimation Models Using UAV Photogrammetry and Multispectral Technology


Abstract
1. Introduction
2. Materials and Methods
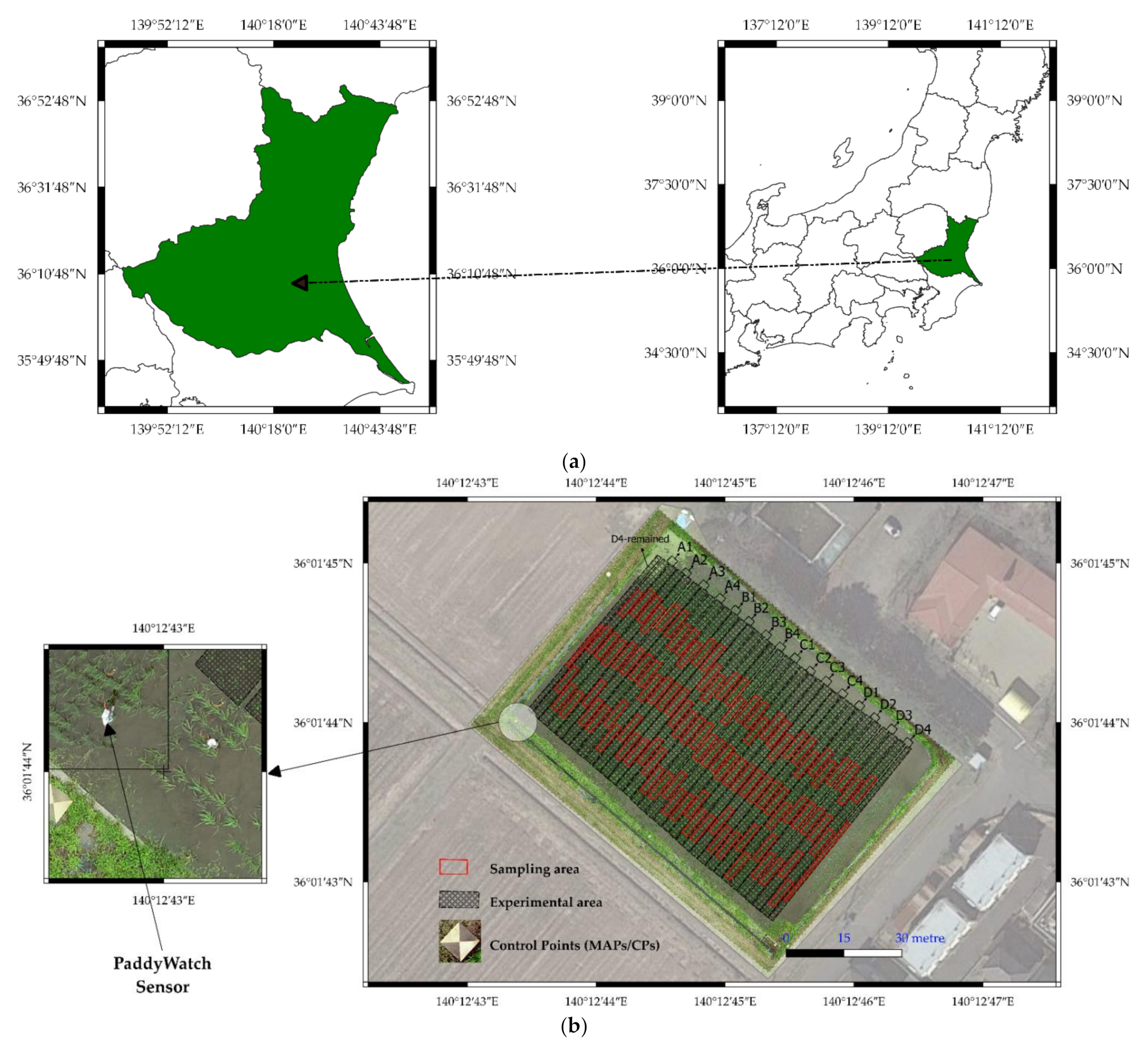
2.1. The Experiment Plot and Measured Data In-Situ
2.2. UAV Platform and Flight Mission of Image Acquisition
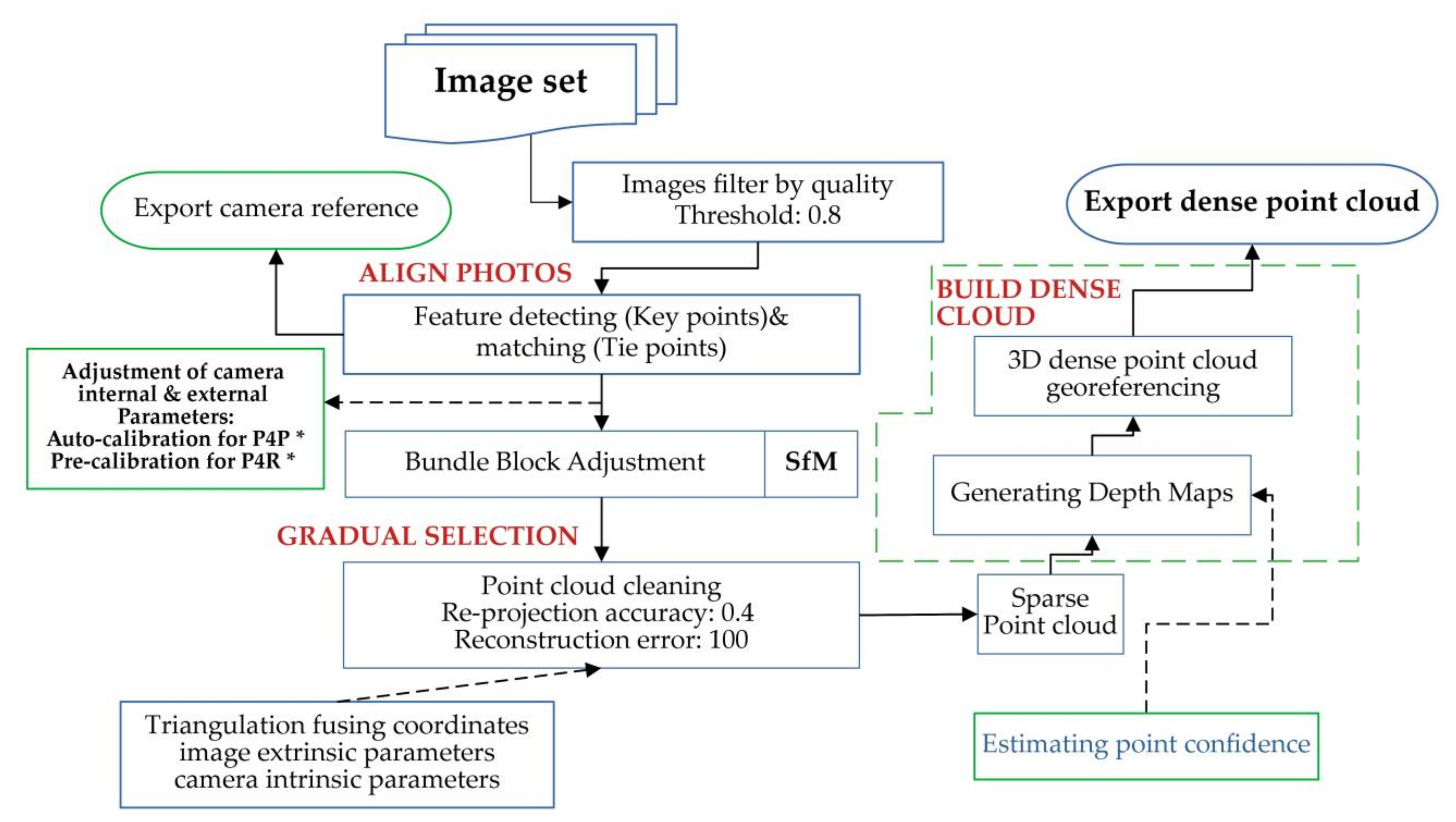
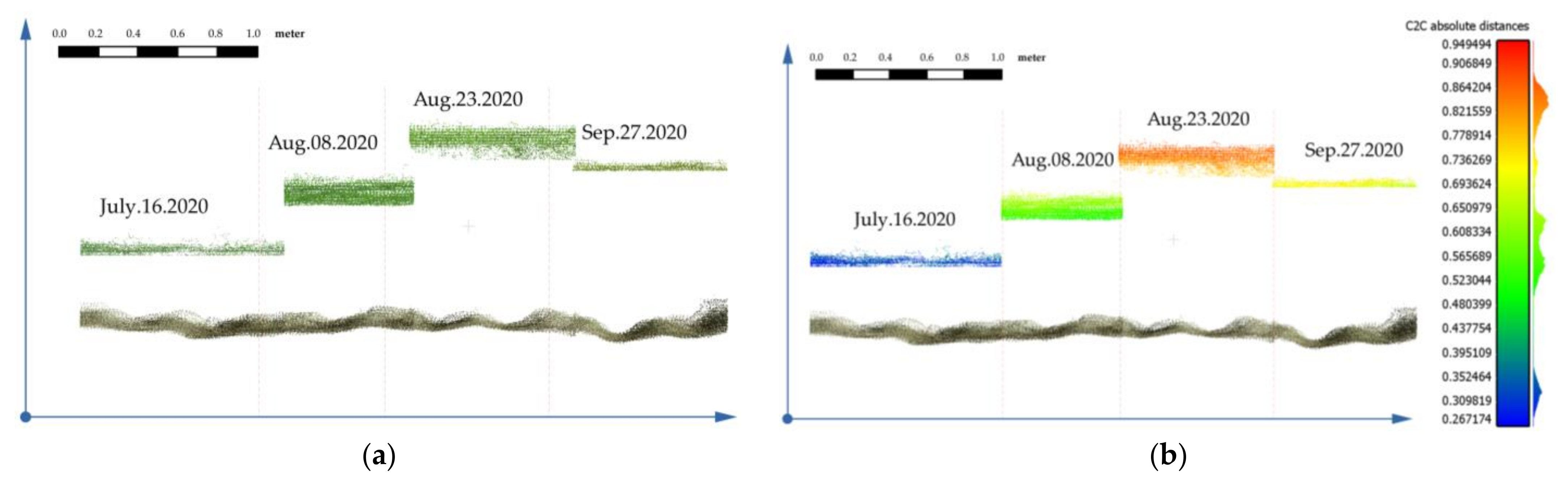
2.3. Processing of UAV-Based Images and Generation of Point Clouds
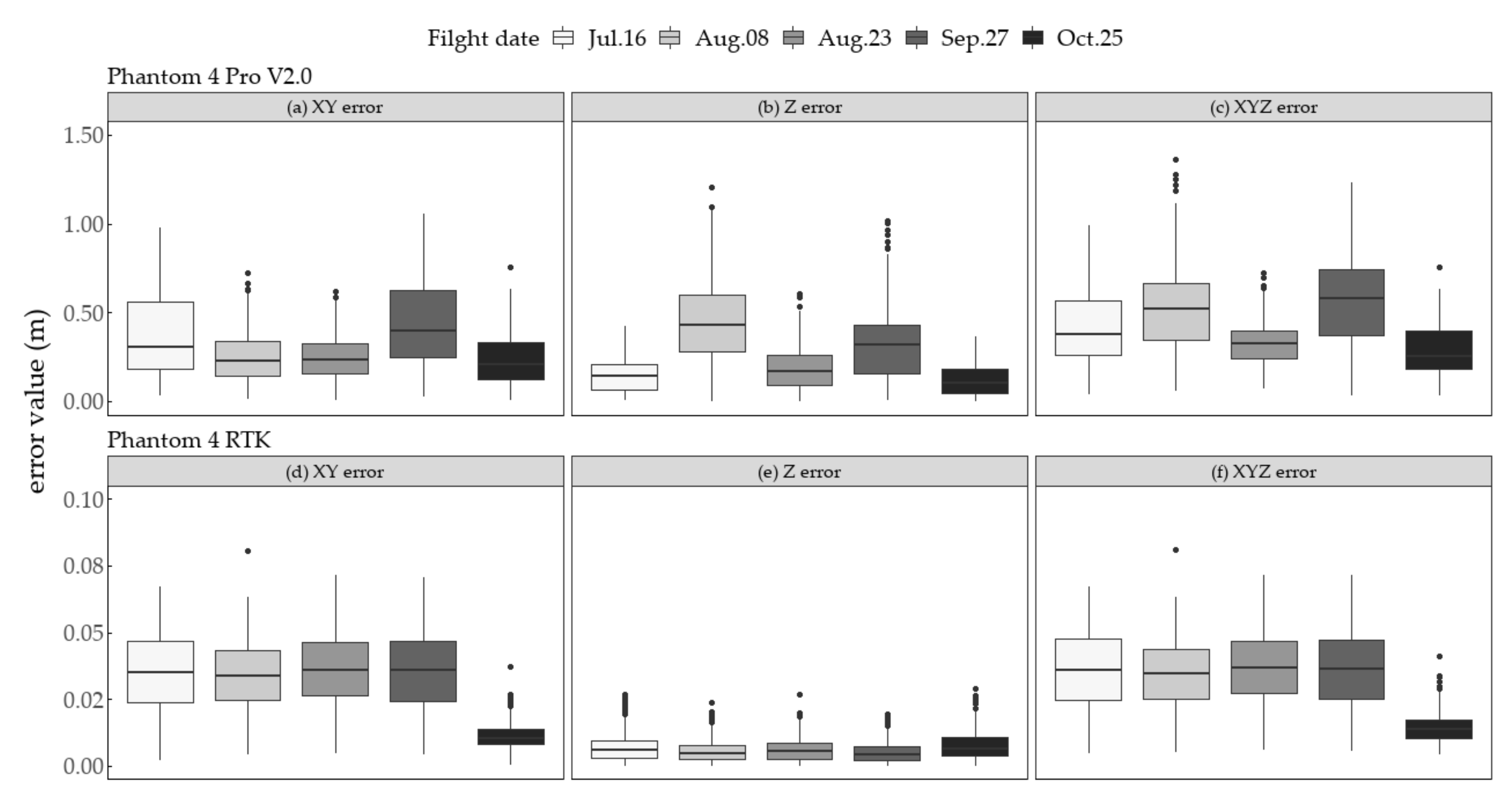
2.4. Errors in the Georeferencing
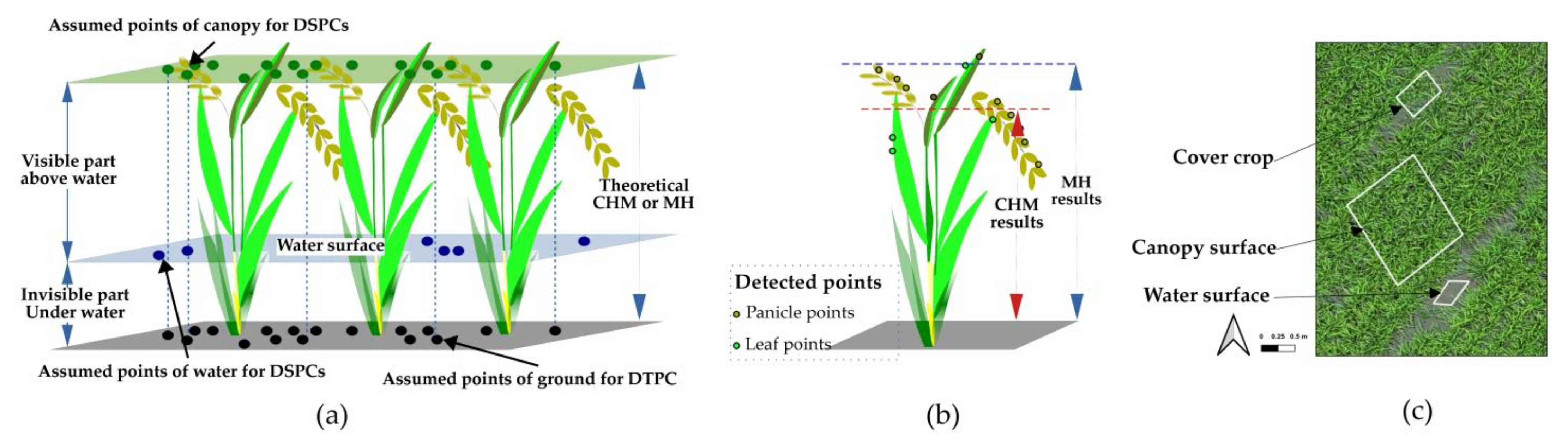
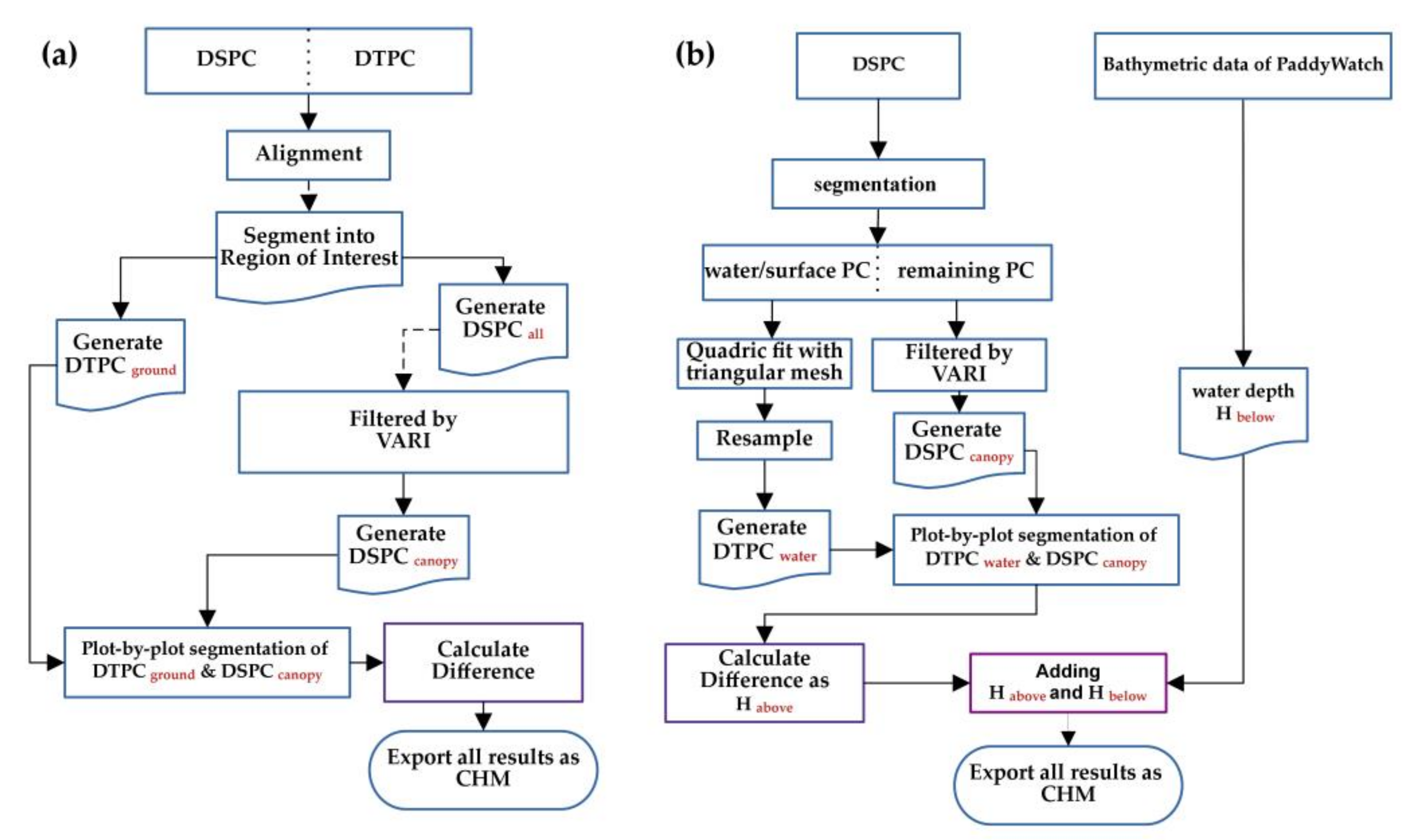
2.5. Extraction of Point Clouds and Establishment of Crop Height Model (CHM) for Measured Height (MH) Estimation
2.5.1. The Definition of M1 and M2
2.5.2. Vegetation Index (VI) Filter and the Equations for the M1 and M2 Methods
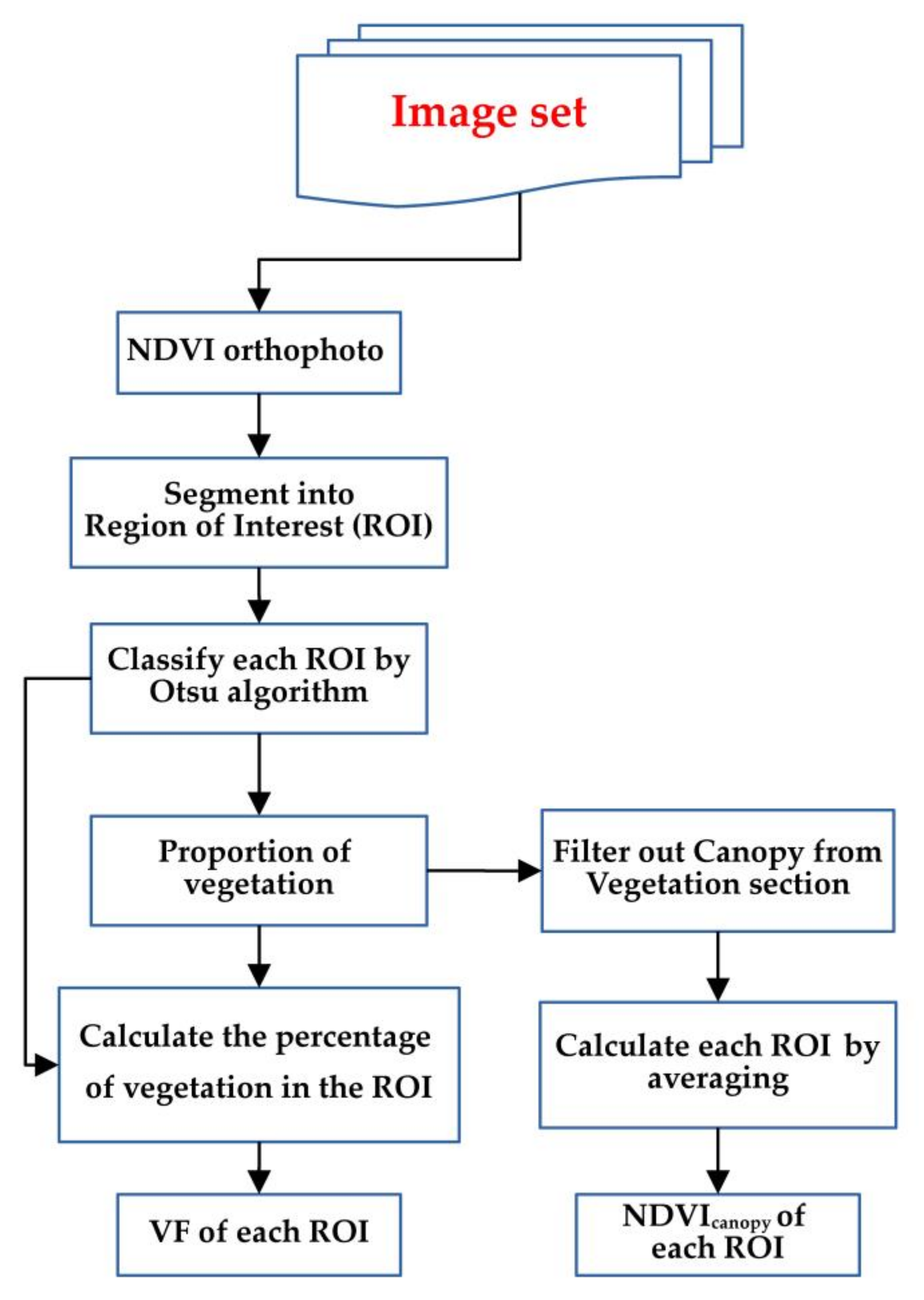
2.6. Extraction and Analysis of Multispectral Information from P4M-Based Imagery
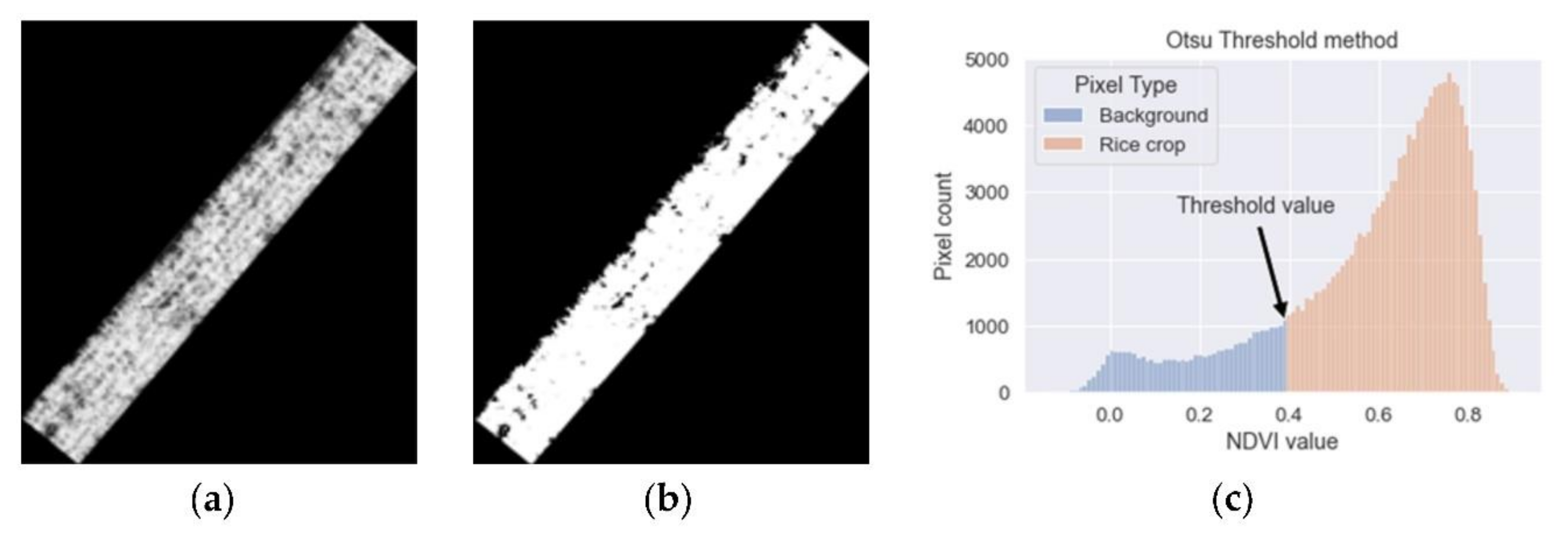
2.6.1. Vegetation Fraction (VF) and Canopy NDVI () Creation
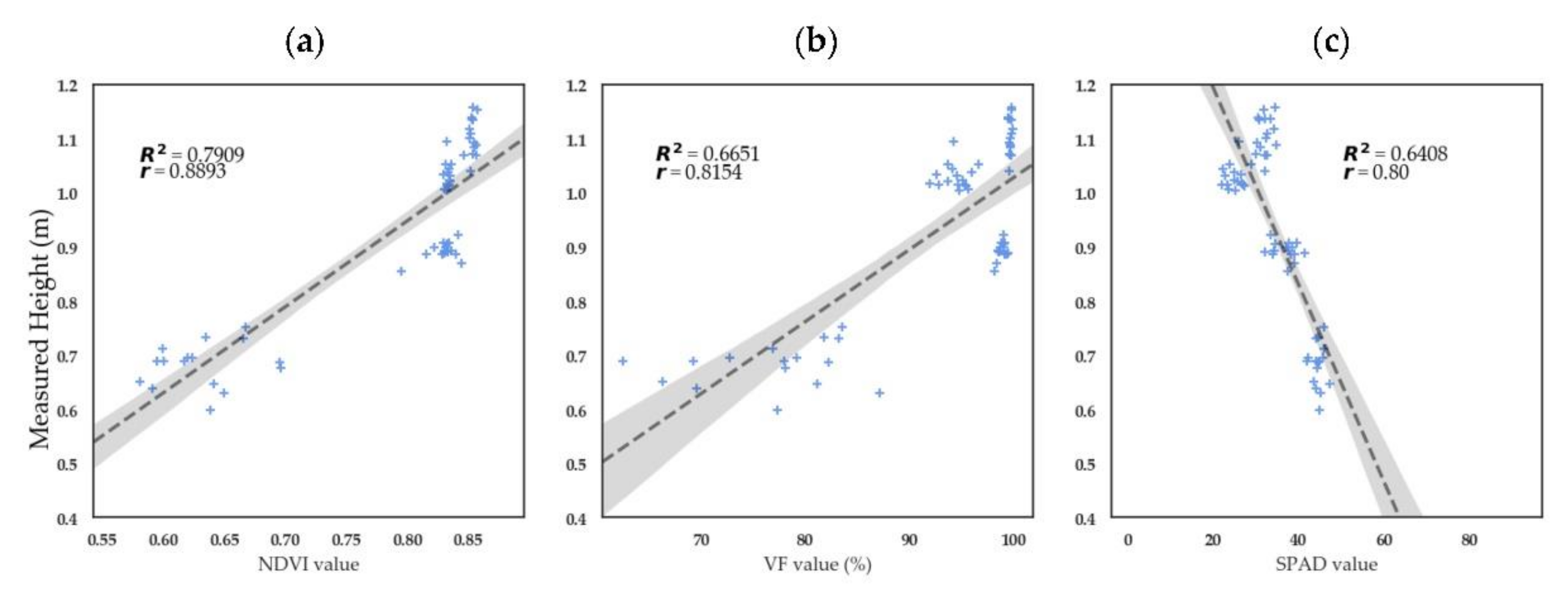
2.6.2. The Potential of the canopy NDVI (), the Vegetation Fraction (VF), and the Soil Plant Analysis Development (SPAD) Value for Measured Height (MH) Estimation
2.7. Linear Regression and Corresponding Evaluation Metric
2.7.1. The Development of One-Dimensional Linear Regression
2.7.2. The Development of a Multiple Linear Regression (MLR) Model
3. Results and Discussion
3.1. The Comparison of P4P-Based and P4R-Based Images of the Result of Error between Original and Theoretical Coordinates
3.2. The Results of the Performance of the Two Crop Height Models (CHMs)
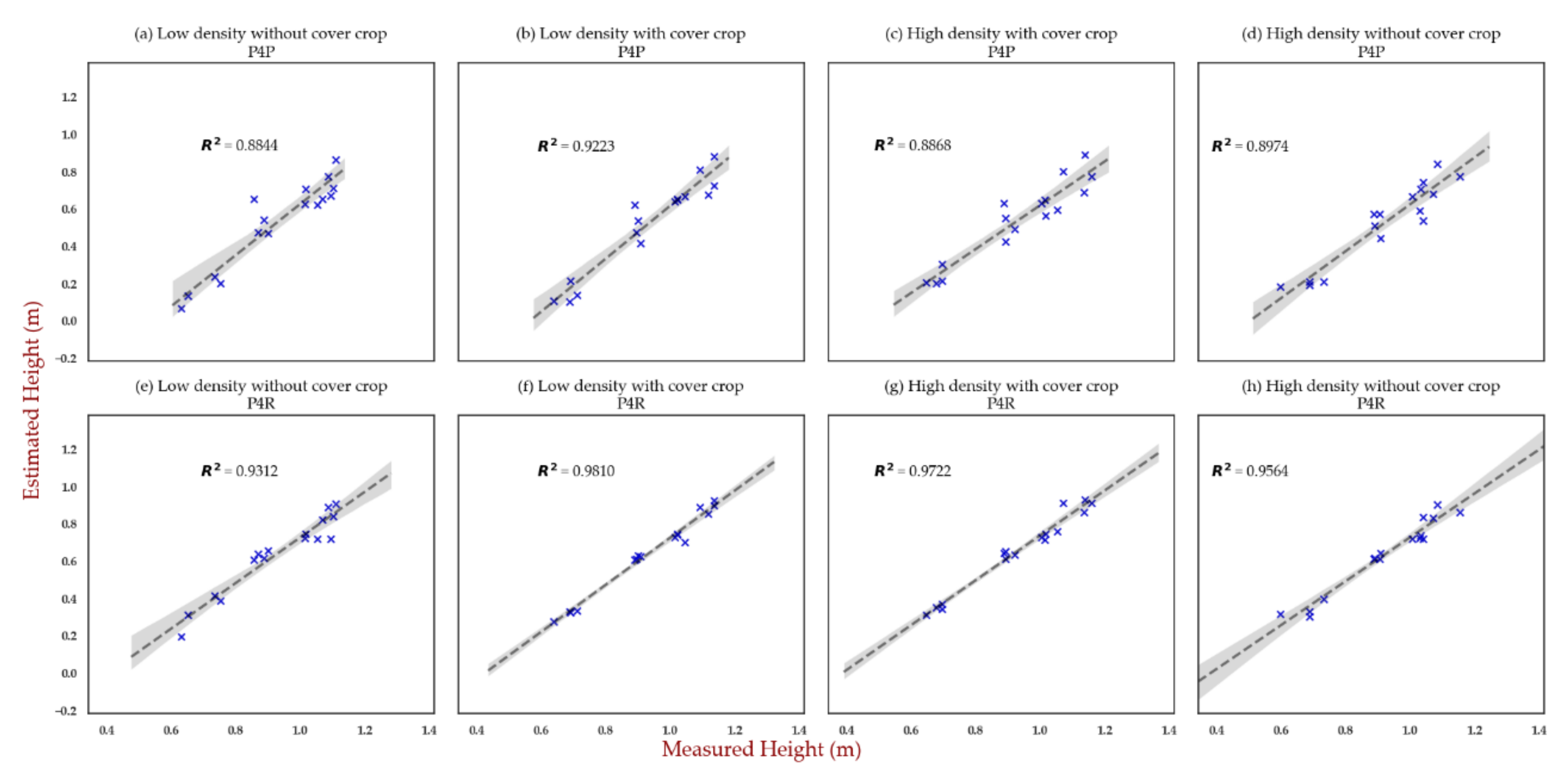
3.2.1. The Relationship between Estimated Height of the M1 CHM and Measured Height (MH) in Different Treatments
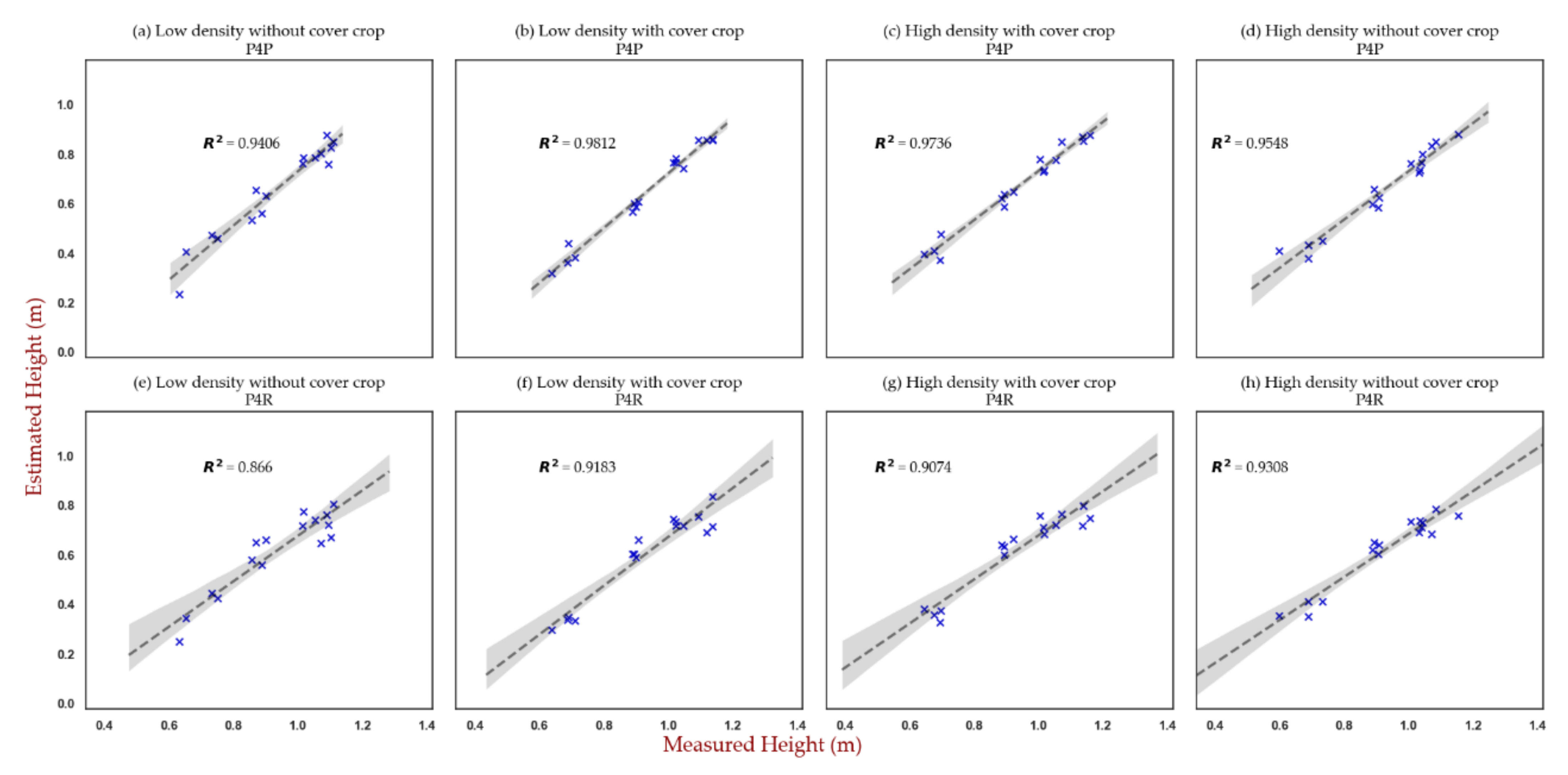
3.2.2. Relationship between the Estimated Height of the M2 CHM and Measured Height (MH) in Different Treatments
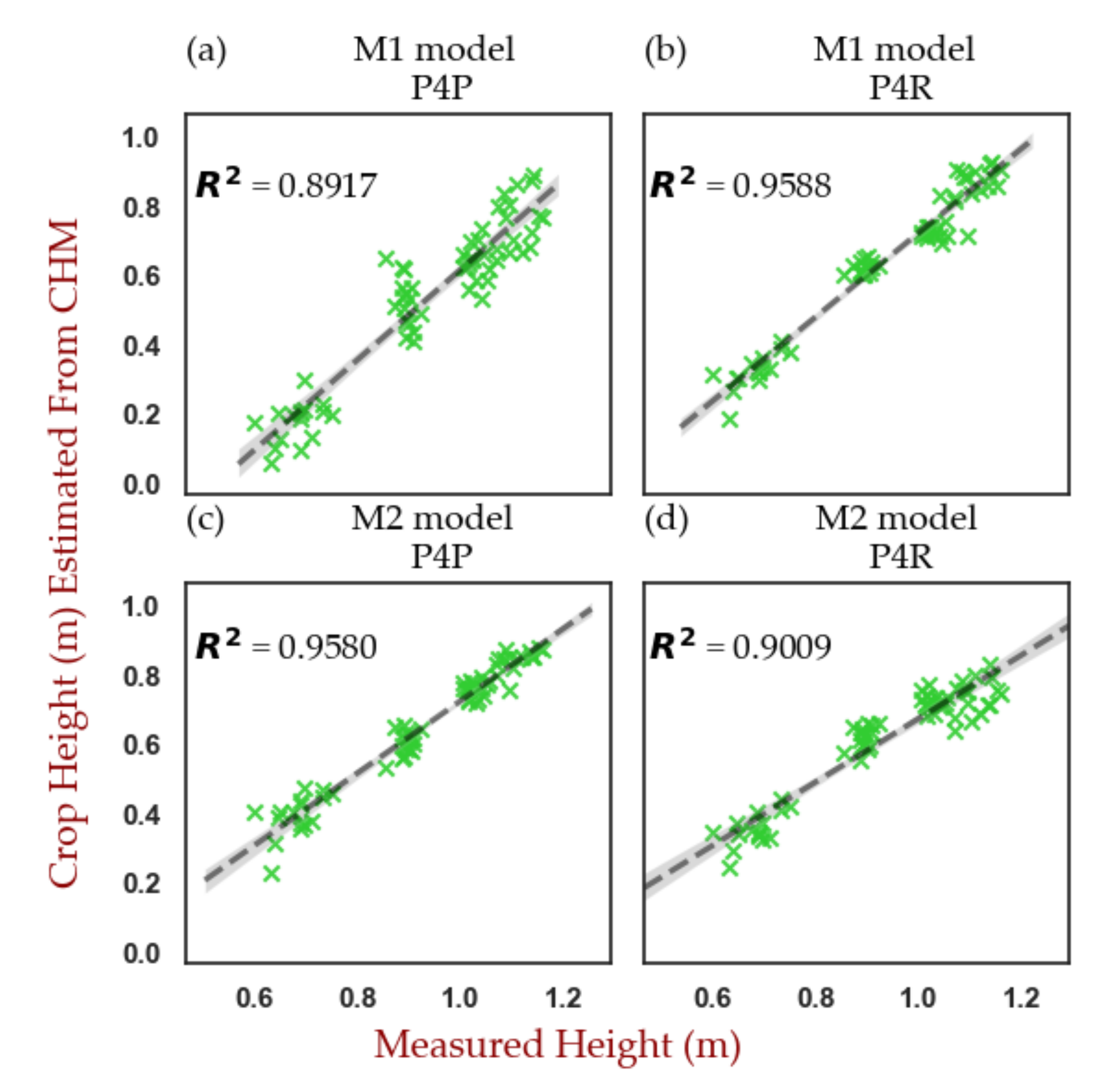
3.2.3. Overall Comparison of Performance between the M1-Based and M2-Based CHMs
3.3. Canopy NDVI (), Vegetation Fraction (VF) and Soil Plant Analysis Development (SPAD) Associated with Chlorophyll Content for MH Estimation
3.4. The Performance of the M3 Method for Measured Height (MH) Estimation
3.4.1. The Cross-Validation Performance of the M3-Based MLR Model
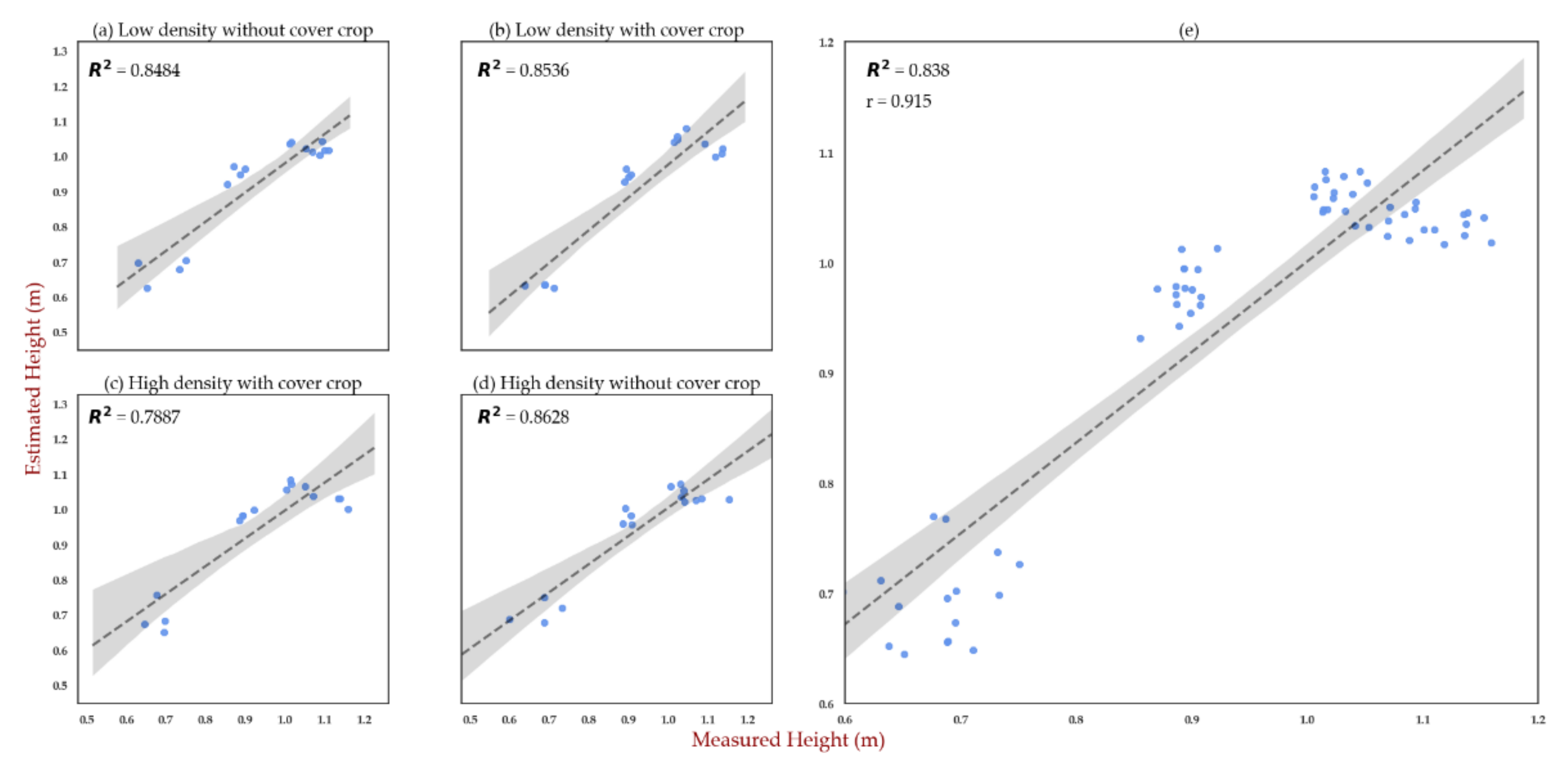
3.4.2. Relationship between the Estimated Height of the M3 Model and Measured Height (MH) in Different Treatments
3.5. Evaluation and Discussion Based on the M1, M2, and M3 Methods
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Badawy, S.A.; Zayed, B.A.; Bassiouni, S.M.A.; Mahdi, A.H.A.; Majrashi, A.; Ali, E.F.; Seleiman, M.F. Influence of Nano Silicon and Nano Selenium on Root Characters, Growth, Ion Selectivity, Yield, and Yield Components of Rice (Oryza Sativa L.) under Salinity Conditions. Plants 2021, 10, 1657. [Google Scholar] [CrossRef] [PubMed]
- Hossain, M.; Fischer, K.S. Rice Research for Food Security and Sustainable Agricultural Development in Asia: Achievements and Future Challenges. GeoJournal 1995, 35, 286–298. [Google Scholar] [CrossRef]
- Gebbers, R.; Adamchuk, V.I. Precision Agriculture and Food Security. Science 2010, 327, 828–831. [Google Scholar] [CrossRef] [PubMed]
- Yang, G.; Liu, J.; Zhao, C.; Li, Z.; Huang, Y.; Yu, H.; Xu, B.; Yang, X.; Zhu, D.; Zhang, X.; et al. Unmanned Aerial Vehicle Remote Sensing for Field-Based Crop Phenotyping: Current Status and Perspectives. Front. Plant Sci. 2017, 8, 1111. [Google Scholar] [CrossRef]
- Fasoula, V.A.; Fasoula, D.A. Principles Underlying Genetic Improvement for High and Stable Crop Yield Potential. Field Crops Res. 2002, 75, 191–209. [Google Scholar] [CrossRef]
- Darvishzadeh, R.; Skidmore, A.; Schlerf, M.; Atzberger, C. Inversion of a Radiative Transfer Model for Estimating Vegetation LAI and Chlorophyll in a Heterogeneous Grassland. Remote Sens. Environ. 2008, 112, 2592–2604. [Google Scholar] [CrossRef]
- Yu, K.; Lenz-Wiedemann, V.; Chen, X.; Bareth, G. Estimating Leaf Chlorophyll of Barley at Different Growth Stages Using Spectral Indices to Reduce Soil Background and Canopy Structure Effects. ISPRS J. Photogramm. Remote Sens. 2014, 97, 58–77. [Google Scholar] [CrossRef]
- Li, B.; Xu, X.; Han, J.; Zhang, L.; Bian, C.; Jin, L.; Liu, J. The Estimation of Crop Emergence in Potatoes by UAV RGB Imagery. Plant Methods 2019, 15, 15. [Google Scholar] [CrossRef]
- Madec, S.; Baret, F.; de Solan, B.; Thomas, S.; Dutartre, D.; Jezequel, S.; Hemmerlé, M.; Colombeau, G.; Comar, A. High-Throughput Phenotyping of Plant Height: Comparing Unmanned Aerial Vehicles and Ground LiDAR Estimates. Front. Plant Sci. 2017, 8, 2002. [Google Scholar] [CrossRef]
- Li, W.; Niu, Z.; Chen, H.; Li, D.; Wu, M.; Zhao, W. Remote Estimation of Canopy Height and Aboveground Biomass of Maize Using High-Resolution Stereo Images from a Low-Cost Unmanned Aerial Vehicle System. Ecol. Indic. 2016, 67, 637–648. [Google Scholar] [CrossRef]
- Casanova, D.; Epema, G.F.; Goudriaan, J. Monitoring Rice Reflectance at Field Level for Estimating Biomass and LAI. Field Crops Res. 1998, 55, 83–92. [Google Scholar] [CrossRef]
- Liu, X.; Zhai, H.; Shen, Y.; Lou, B.; Jiang, C.; Li, T.; Hussain, S.B.; Shen, G. Large-Scale Crop Mapping From Multisource Remote Sensing Images in Google Earth Engine. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 414–427. [Google Scholar] [CrossRef]
- Chang, A.; Eo, Y.; Kim, S.; Kim, Y.; Kim, Y. Canopy-Cover Thematic-Map Generation for Military Map Products Using Remote Sensing Data in Inaccessible Areas. Landsc. Ecol. Eng. 2010, 7, 263–274. [Google Scholar] [CrossRef]
- Mulla, D.J. Twenty Five Years of Remote Sensing in Precision Agriculture: Key Advances and Remaining Knowledge Gaps. Biosyst. Eng. 2013, 114, 358–371. [Google Scholar] [CrossRef]
- Radoglou-Grammatikis, P.; Sarigiannidis, P.; Lagkas, T.; Moscholios, I. A Compilation of UAV Applications for Precision Agriculture. Comput. Netw. 2020, 172, 107148. [Google Scholar] [CrossRef]
- Chang, A.; Jung, J.; Maeda, M.M.; Landivar, J. Crop Height Monitoring with Digital Imagery from Unmanned Aerial System (UAS). Comput. Electron. Agric. 2017, 141, 232–237. [Google Scholar] [CrossRef]
- Bonadies, S.; Lefcourt, A.; Gadsden, S.A. A Survey of Unmanned Ground Vehicles with Applications to Agricultural and Environmental Sensing. In Proceedings of the Autonomous Air and Ground Sensing Systems for Agricultural Optimization and Phenotyping, Baltimore, MD, USA, 18–19 April 2016; Volume 9866, pp. 142–155. [Google Scholar]
- Han-Ya, I.; Ishii, K.; Noguchi, N. Satellite and Aerial Remote Sensing for Production Estimates and Crop Assessment. Environ. Control. Biol. 2010, 48, 51–58. [Google Scholar] [CrossRef]
- Gevaert, C.M.; Suomalainen, J.; Tang, J.; Kooistra, L. Generation of Spectral–Temporal Response Surfaces by Combining Multispectral Satellite and Hyperspectral UAV Imagery for Precision Agriculture Applications. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3140–3146. [Google Scholar] [CrossRef]
- Araus, J.L.; Cairns, J.E. Field High-Throughput Phenotyping: The New Crop Breeding Frontier. Trends Plant Sci. 2014, 19, 52–61. [Google Scholar] [CrossRef]
- Gil-Docampo, M.L.; Arza-García, M.; Ortiz-Sanz, J.; Martínez-Rodríguez, S.; Marcos-Robles, J.L.; Sánchez-Sastre, L.F. Above-Ground Biomass Estimation of Arable Crops Using UAV-Based SfM Photogrammetry. Geocarto Int. 2020, 35, 687–699. [Google Scholar] [CrossRef]
- Bendig, J.; Bolten, A.; Bennertz, S.; Broscheit, J.; Eichfuss, S.; Bareth, G. Estimating Biomass of Barley Using Crop Surface Models (CSMs) Derived from UAV-Based RGB Imaging. Remote Sens. 2014, 6, 10395. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; Peña, J.M.; de Castro, A.I.; López-Granados, F. Multi-Temporal Mapping of the Vegetation Fraction in Early-Season Wheat Fields Using Images from UAV. Comput. Electron. Agric. 2014, 103, 104–113. [Google Scholar] [CrossRef]
- Xuan, W.; Lin, Z. Rectifying High-Resolution Images by Using Rectified Low-Resolution Images. In Multispectral Image Processing and Pattern Recognition; International Society for Optics and Photonics: Wuhan, China, 2001; Volume 4552, pp. 196–200. [Google Scholar]
- Stempfhuber, W.; Buchholz, M. A Precise, Low-Cost Rtk Gnss System for Uav Applications. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2012, XXXVIII-1/C22, 289–293. [Google Scholar] [CrossRef]
- Gerke, M.; Przybilla, H.J. Accuracy Analysis of Photogrammetric UAV Image Blocks: Influence of Onboard RTK-GNSS and Cross Flight Patterns. Photogramm Fernerkun 2016, 17–30. [Google Scholar] [CrossRef]
- Štroner, M.; Urban, R.; Seidl, J.; Reindl, T.; Brouček, J. Photogrammetry Using UAV-Mounted GNSS RTK: Georeferencing Strategies without GCPs. Remote Sens. 2021, 13, 1336. [Google Scholar] [CrossRef]
- Tomaštík, J.; Mokroš, M.; Surový, P.; Grznárová, A.; Merganič, J. UAV RTK/PPK Method—An Optimal Solution for Mapping Inaccessible Forested Areas? Remote Sens. 2019, 11, 721. [Google Scholar] [CrossRef]
- Jaud, M.; Bertin, S.; Beauverger, M.; Augereau, E.; Delacourt, C. RTK GNSS-Assisted Terrestrial SfM Photogrammetry without GCP: Application to Coastal Morphodynamics Monitoring. Remote Sens. 2020, 12, 1889. [Google Scholar] [CrossRef]
- Bannari, A.; Morin, D.; Bonn, F.; Huete, A.R. A Review of Vegetation Indices. Remote Sens. Rev. 1995, 13, 95–120. [Google Scholar] [CrossRef]
- Jakubauskas, M.E.; Legates, D.R.; Kastens, J.H. Crop Identification Using Harmonic Analysis of Time-Series AVHRR NDVI Data. Comput. Electron. Agric. 2002, 37, 127–139. [Google Scholar] [CrossRef]
- Davi, H.; Soudani, K.; Deckx, T.; Dufrene, E.; Le Dantec, V.; FranÇois, C. Estimation of Forest Leaf Area Index from SPOT Imagery Using NDVI Distribution over Forest Stands. Int. J. Remote Sens. 2006, 27, 885–902. [Google Scholar] [CrossRef]
- Freden, S.C.; Mercanti, E.P.; Becker, M.A. Third Earth Resources Technology Satellite-1 Symposium: The Proceedings of a Symposium Held by Goddard Space Flight Center at Washington, D.C. on December 10–14, 1973: Prepared at Goddard Space Flight Center; National Aeronautics and Space Administration: Greenbelt, MD, USA, 1974; Volume 3, pp. 1–155. [Google Scholar]
- Villareal, M.K.; Tongco, A.F.; Maja, J.M.J. Winter Wheat Crop Height Estimation Using Small Unmanned Aerial System (SUAS). Agric. Sci. 2020, 11, 355–368. [Google Scholar] [CrossRef][Green Version]
- GISGeography. DEM, DSM & DTM Differences-A Look at Elevation Models in GIS. Available online: https://gisgeography.com/dem-dsm-dtm-differences/ (accessed on 18 November 2021).
- Malambo, L.; Popescu, S.C.; Murray, S.C.; Putman, E.; Pugh, N.A.; Horne, D.W.; Richardson, G.; Sheridan, R.; Rooney, W.L.; Avant, R.; et al. Multitemporal Field-Based Plant Height Estimation Using 3D Point Clouds Generated from Small Unmanned Aerial Systems High-Resolution Imagery. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 31–42. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, R.; Song, W.; Han, L.; Liu, X.; Sun, X.; Luo, M.; Chen, K.; Zhang, Y.; Yang, H.; et al. Dynamic Plant Height QTL Revealed in Maize through Remote Sensing Phenotyping Using a High-Throughput Unmanned Aerial Vehicle (UAV). Sci. Rep. 2019, 9, 3458. [Google Scholar] [CrossRef] [PubMed]
- Gebremedhin, A.; Badenhorst, P.; Wang, J.; Giri, K.; Spangenberg, G.; Smith, K. Development and Validation of a Model to Combine NDVI and Plant Height for High-Throughput Phenotyping of Herbage Yield in a Perennial Ryegrass Breeding Program. Remote Sens. 2019, 11, 2494. [Google Scholar] [CrossRef]
- Kawamura, K.; Asai, H.; Yasuda, T.; Khanthavong, P.; Soisouvanh, P.; Phongchanmixay, S. Field Phenotyping of Plant Height in an Upland Rice Field in Laos Using Low-Cost Small Unmanned Aerial Vehicles (UAVs). Plant Prod. Sci. 2020, 23, 452–465. [Google Scholar] [CrossRef]
- Jimenez-Berni, J.A.; Deery, D.M.; Rozas-Larraondo, P.; Condon, A.; Tony, G.; Rebetzke, G.J.; James, R.A.; Bovill, W.D.; Furbank, R.T.; Sirault, X.R.R. High Throughput Determination of Plant Height, Ground Cover, and Above-Ground Biomass in Wheat with LiDAR. Front. Plant Sci. 2018, 9, 237. [Google Scholar] [CrossRef] [PubMed]
- Uysal, M.; Toprak, A.S.; Polat, N. DEM Generation with UAV Photogrammetry and Accuracy Analysis in Sahitler Hill. Measurement 2015, 73, 539–543. [Google Scholar] [CrossRef]
- Gonçalves, J.A.; Henriques, R. UAV Photogrammetry for Topographic Monitoring of Coastal Areas. ISPRS J. Photogramm. Remote Sens. 2015, 104, 101–111. [Google Scholar] [CrossRef]
- Agisoft. Control and Check Points for Aerial Surveys. Available online: https://agisoft.freshdesk.com/support/solutions/articles/31000154132-control-and-check-points-for-aerial-surveys (accessed on 18 November 2021).
- Wikipedia. Root-Mean-Square Deviation. Available online: https://en.wikipedia.org/wiki/Root-mean-square_deviation (accessed on 19 November 2021).
- Peppa, M.V.; Hall, J.; Goodyear, J.; Mills, J.P. Photogrammetric Assessment and Comparison of Dji Phantom 4 Pro and Phantom 4 Rtk Small Unmanned Aircraft Systems. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2019, XLII-2/W13, 503–509. [Google Scholar] [CrossRef]
- Han, X.; Thomasson, J.A.; Bagnall, G.C.; Pugh, N.A.; Horne, D.W.; Rooney, W.L.; Jung, J.; Chang, A.; Malambo, L.; Popescu, S.C.; et al. Measurement and Calibration of Plant-Height from Fixed-Wing UAV Images. Sensors 2018, 18, 4092. [Google Scholar] [CrossRef]
- CloudCompareWiki. Fit Quadric-CloudCompareWiki. Available online: https://www.cloudcompare.org/doc/wiki/index.php?title=Fit_Quadric (accessed on 26 November 2021).
- Afdhalia, F.; Supriatna, S.; Shidiq, I.P.A.; Manessa, M.D.M.; Ristya, Y. Detection of Rice Varieties Based on Spectral Value Data Using UAV-Based Images. In Proceedings of the Sixth International Symposium on LAPAN-IPB Satellite, Bogor, Indonesia, 17–18 September 2019; Volume 1137222. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Stark, R.; Grits, U.; Rundquist, D.; Kaufman, Y.; Derry, D. Vegetation and Soil Lines in Visible Spectral Space: A Concept and Technique for Remote Estimation of Vegetation Fraction. Int. J. Remote Sens. 2002, 23, 2537–2562. [Google Scholar] [CrossRef]
- Cao, Y.; Li, G.L.; Luo, Y.K.; Pan, Q.; Zhang, S.Y. Monitoring of Sugar Beet Growth Indicators Using Wide-Dynamic-Range Vegetation Index (WDRVI) Derived from UAV Multispectral Images. Comput. Electron. Agric. 2020, 171, 105331. [Google Scholar] [CrossRef]
- Rosle, R.; Che’Ya, N.; Roslin, N.; Halip, R.; Ismail, M. Monitoring Early Stage of Rice Crops Growth Using Normalized Difference Vegetation Index Generated from UAV. IOP Conf. Ser. Earth Environ. Sci. 2019, 355, 012066. [Google Scholar] [CrossRef]
- Huang, S.; Tang, L.; Hupy, J.P.; Wang, Y.; Shao, G. A Commentary Review on the Use of Normalized Difference Vegetation Index (NDVI) in the Era of Popular Remote Sensing. J. For. Res. 2021, 32, 1–6. [Google Scholar] [CrossRef]
- Purevdorj, T.S.; Tateishi, R.; Ishiyama, T.; Honda, Y. Relationships between Percent Vegetation Cover and Vegetation Indices. Int. J. Remote Sens. 1998, 19, 3519–3535. [Google Scholar] [CrossRef]
- Kim, D.-W.; Yun, H.; Jeong, S.-J.; Kwon, Y.-S.; Kim, S.-G.; Lee, W.; Kim, H.-J. Modeling and Testing of Growth Status for Chinese Cabbage and White Radish with UAV-Based RGB Imagery. Remote Sens. 2018, 10, 563. [Google Scholar] [CrossRef]
- Yang, H.; Yang, X.; Heskel, M.; Sun, S.; Tang, J. Seasonal Variations of Leaf and Canopy Properties Tracked by Ground-Based NDVI Imagery in a Temperate Forest. Sci. Rep. 2017, 7, 1267. [Google Scholar] [CrossRef]
- Otsu, N. A Threshold Selection Method from Gray-Level Histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Fenghua, Y.; Tongyu, X.; Yingli, C.; Guijun, Y.; Wen, D.; Shu, W. Models for Estimating the Leaf NDVI of Japonica Rice on a Canopy Scale by Combining Canopy NDVI and Multisource Environmental Data in Northeast China. Int. J. Agric. Biol. Eng. 2016, 9, 132–142. [Google Scholar]
- Kimani, S.M.; Cheng, W.; Kanno, T.; Nguyen-Sy, T.; Abe, R.; Oo, A.Z.; Tawaraya, K.; Sudo, S. Azolla Cover Significantly Decreased CH 4 but Not N 2 O Emissions from Flooding Rice Paddy to Atmosphere. Soil Sci. Plant Nutr. 2018, 64, 68–76. [Google Scholar] [CrossRef]
- Hussain, S.; Fujii, T.; McGoey, S.; Yamada, M.; Ramzan, M.; Akmal, M. Evaluation of Different Rice Varieties for Growth and Yield Characteristics. J. Anim. Plant Sci. 2014, 24, 1504–1510. [Google Scholar]
- Liu, K.; Li, Y.; Hu, H. Predicting Ratoon Rice Growth Rhythmbased on NDVI at Key Growth Stages of Main Rice. Chil. J. Agric. Res. 2015, 75, 410–417. [Google Scholar] [CrossRef]
- Minh, V.Q.; Hien, T.T.; Chien, H.V. Monitoring and Delineating the Progress of Rice Sowing and Cropping Calendar Assisting in Early Warning Pest and Desease in the Mekong Delta. In Proceedings of the 34th Asian Conference on Remote Sensing (ACRS 2013), Bali, Indonesia, 20–24 October 2013; p. 8. [Google Scholar]
- Rahetlah, B.V.; Salgado, P.; Andrianarisoa, B.; Tillard, E.; Razafindrazaka, H.; Mézo, L.L.; Ramalanjaona, V.L. Relationship between Normalized Difference Vegetation Index (NDVI) and Forage Biomass Yield in the Vakinankaratra Region, Madagascar. Livest. Res. Rural. Dev. 2014, 26, 95. [Google Scholar]
- Wikipedia. Ordinary Least Squares. Scientific and Technical Information Office, National Aeronautics and Space Administration.
- Pepe, M.; Ackermann, S.; Fregonese, L.; Achille, C. 3D Point Cloud Model Color Adjustment by Combining Terrestrial Laser Scanner and Close Range Photogrammetry Datasets. In Proceedings of the ICDH 2016: 18th International Conference on Digital Heritage, London, UK, 24–25 November 2016; Volume 10, p. 7. [Google Scholar]
- Westaway, R.M. Remote Sensing of Clear-Water, Shallow, Gravel-Bed Rivers Using Digital Photogrammetry. Photogramm. Eng. 2001, 67, 1271–1282. [Google Scholar]
- Ruzgienė, B.; Berteška, T.; Gečyte, S.; Jakubauskienė, E.; Aksamitauskas, V.Č. The Surface Modelling Based on UAV Photogrammetry and Qualitative Estimation. Measurement 2015, 73, 619–627. [Google Scholar] [CrossRef]
- Marek, L.; Miřijovský, J.; Tuček, P. Monitoring of the Shallow Landslide Using UAV Photogrammetry and Geodetic Measurements. In Proceedings of the Engineering Geology for Society and Territory; Lollino, G., Giordan, D., Crosta, G.B., Corominas, J., Azzam, R., Wasowski, J., Sciarra, N., Eds.; Springer International Publishing: Cham, Switzerland, 2015; Volume 2, pp. 113–116. [Google Scholar]
- Markwell, J.; Osterman, J.C.; Mitchell, J.L. Calibration of the Minolta SPAD-502 Leaf Chlorophyll Meter. Photosynth. Res. 1995, 46, 467–472. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plot ID | Treatment | |
|---|---|---|
| Sowing Density 1 | Cover Crop Present | |
| A1 | Low | No |
| A2 | Low | Yes |
| A3 | High | Yes |
| A4 | High | No |
| B1 | Low | No |
| B2 | Low | Yes |
| B3 | High | Yes |
| B4 | High | No |
| C1 | Low | No |
| C2 | Low | Yes |
| C3 | High | Yes |
| C4 | High | No |
| D1 | Low | No |
| D2 | Low | Yes |
| D3 | High | Yes |
| D4 | High | No |
| Date | P4P | P4R | ||||
|---|---|---|---|---|---|---|
| XY RMSE | Z RMSE | XYZ RMSE | XY RMSE | Z RMSE | XYZ RMSE | |
| 16 July 2020 | 44 | 18 | 48 | 3.76 | 0.87 | 3.86 |
| 8 August 2020 | 28 | 51 | 58 | 3.67 | 0.68 | 3.73 |
| 23 August 2020 | 27 | 23 | 36 | 3.87 | 0.77 | 3.95 |
| 27 September 2020 | 50 | 38 | 63 | 3.86 | 0.66 | 3.92 |
| 25 October 2020 | 29 | 15 | 33 | 1.21 | 0.98 | 1.56 |
| Assessed Variables | R2 | T-Statistic Value | p-Value | Formula | ||
|---|---|---|---|---|---|---|
| SPAD | NDVIcanopy | VF | ||||
| SPAD and NDVIcanopy | 0.838 | *** | *** | - | *** | 1.139 × NDVIcanopy − 0.007 × SPAD + 0.288 |
| SPAD and VF | 0.817 | *** | - | *** | *** | 0.81 × VF − 0.012 × SPAD + 0.584 |
| NDVIcanopy and VF | 0.807 | - | *** | * | *** | 2.254 × NDVIcanopy − 0.655 × VF − 0.24 |
| SPAD and NDVIcanopy and VF | 0.838 | ** | ** | 0.9 | *** | 1.189 × NDVIcanopy − 0.007 × SPAD − 0.04 × VF + 0.281 |
| CV Method | RMSE (cm) | RMSE Variation (cm) | MAE (cm) | MAE Variation (cm) | ||
|---|---|---|---|---|---|---|
| 8-folds | 0.827 | 0.838 | 5.9260 | 0.4658 | −0.2233 | −0.0295 |
| 16-folds | 0.822 | 0.838 | 6.0018 | 0.4802 | −0.2991 | −0.0439 |
| 24-folds | 0.829 | 0.838 | 5.8593 | 0.4601 | −0.1566 | −0.0238 |
| 32-folds | 0.826 | 0.838 | 5.9475 | 0.4675 | −0.2448 | −0.0312 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, W.; Okayama, T.; Komatsuzaki, M. Rice Height Monitoring between Different Estimation Models Using UAV Photogrammetry and Multispectral Technology. Remote Sens. 2022, 14, 78. https://doi.org/10.3390/rs14010078
Lu W, Okayama T, Komatsuzaki M. Rice Height Monitoring between Different Estimation Models Using UAV Photogrammetry and Multispectral Technology. Remote Sensing. 2022; 14(1):78. https://doi.org/10.3390/rs14010078
Chicago/Turabian StyleLu, Wenyi, Tsuyoshi Okayama, and Masakazu Komatsuzaki. 2022. "Rice Height Monitoring between Different Estimation Models Using UAV Photogrammetry and Multispectral Technology" Remote Sensing 14, no. 1: 78. https://doi.org/10.3390/rs14010078
APA StyleLu, W., Okayama, T., & Komatsuzaki, M. (2022). Rice Height Monitoring between Different Estimation Models Using UAV Photogrammetry and Multispectral Technology. Remote Sensing, 14(1), 78. https://doi.org/10.3390/rs14010078