
Ground Deformation Modelling of the 2020 Mw6.9 Samos Earthquake (Greece) Based on InSAR and GNSS Data


Abstract

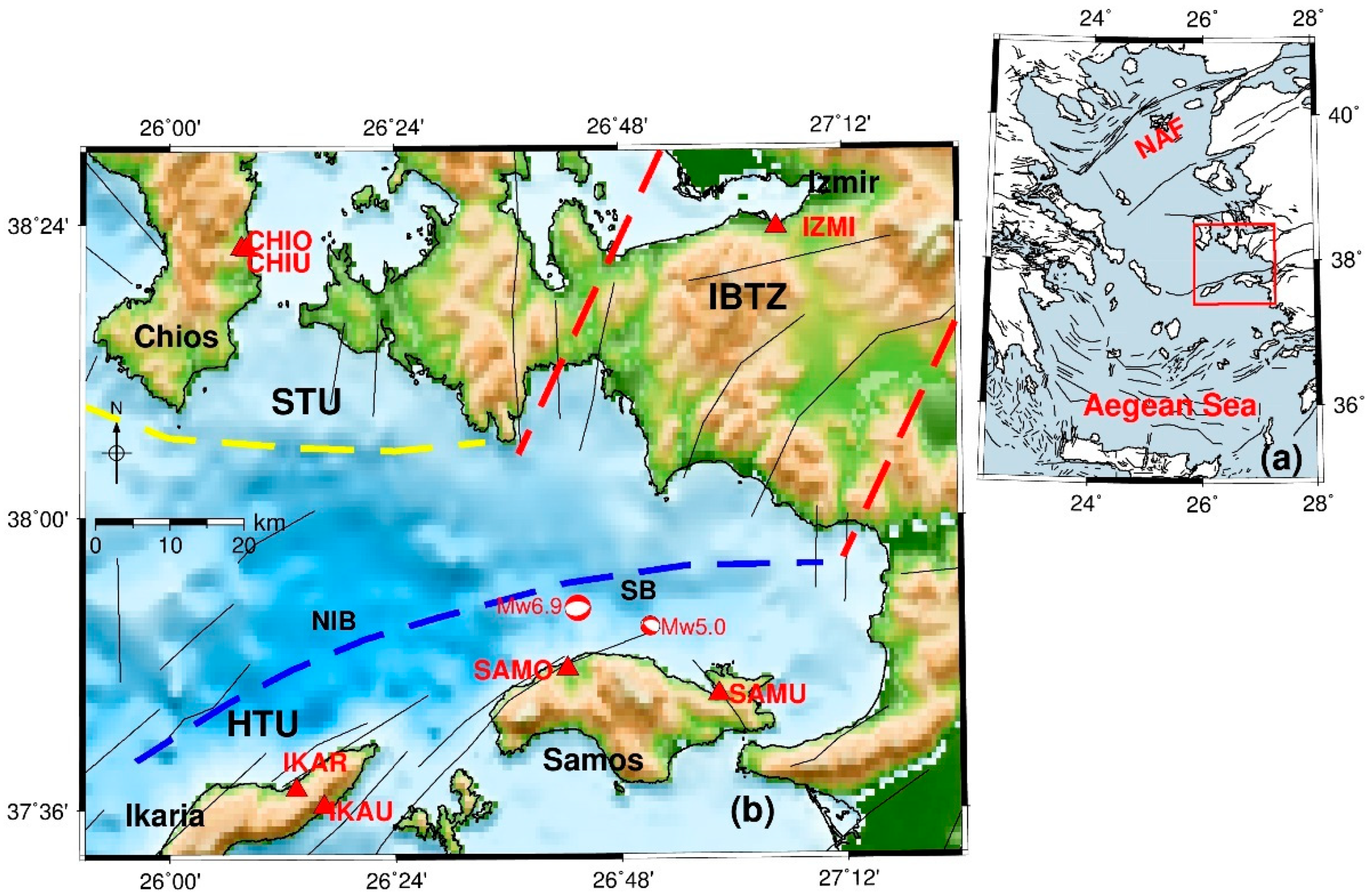
1. Introduction
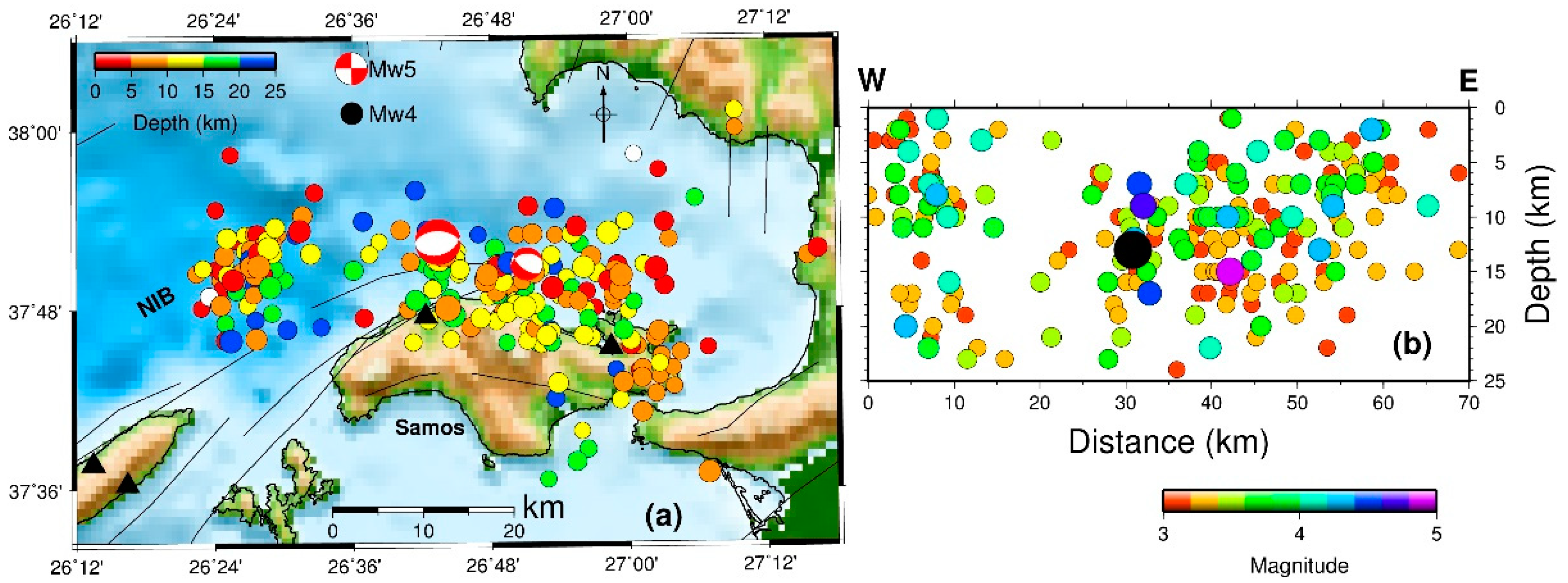
2. Seismological Data
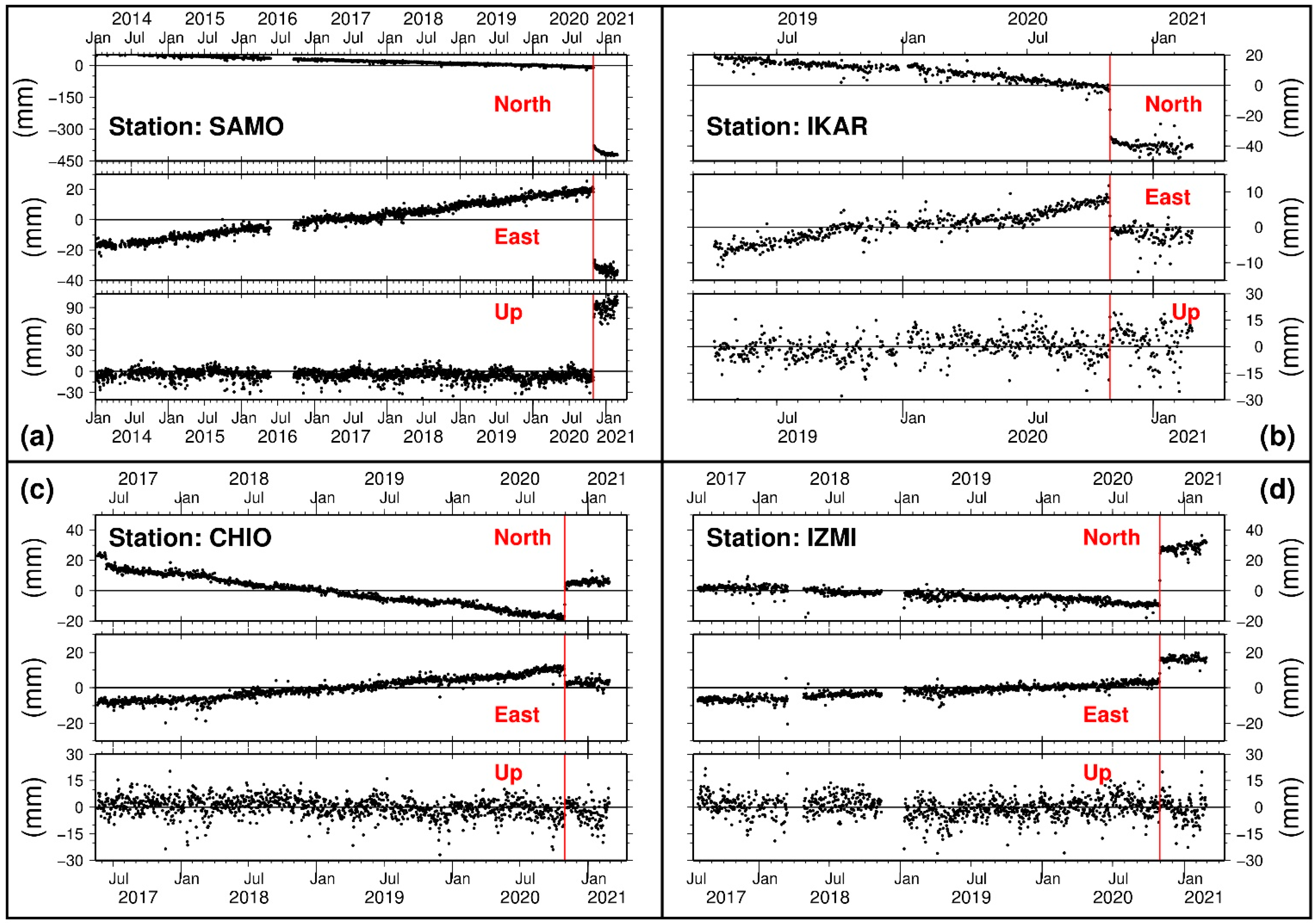
3. GNSS Data
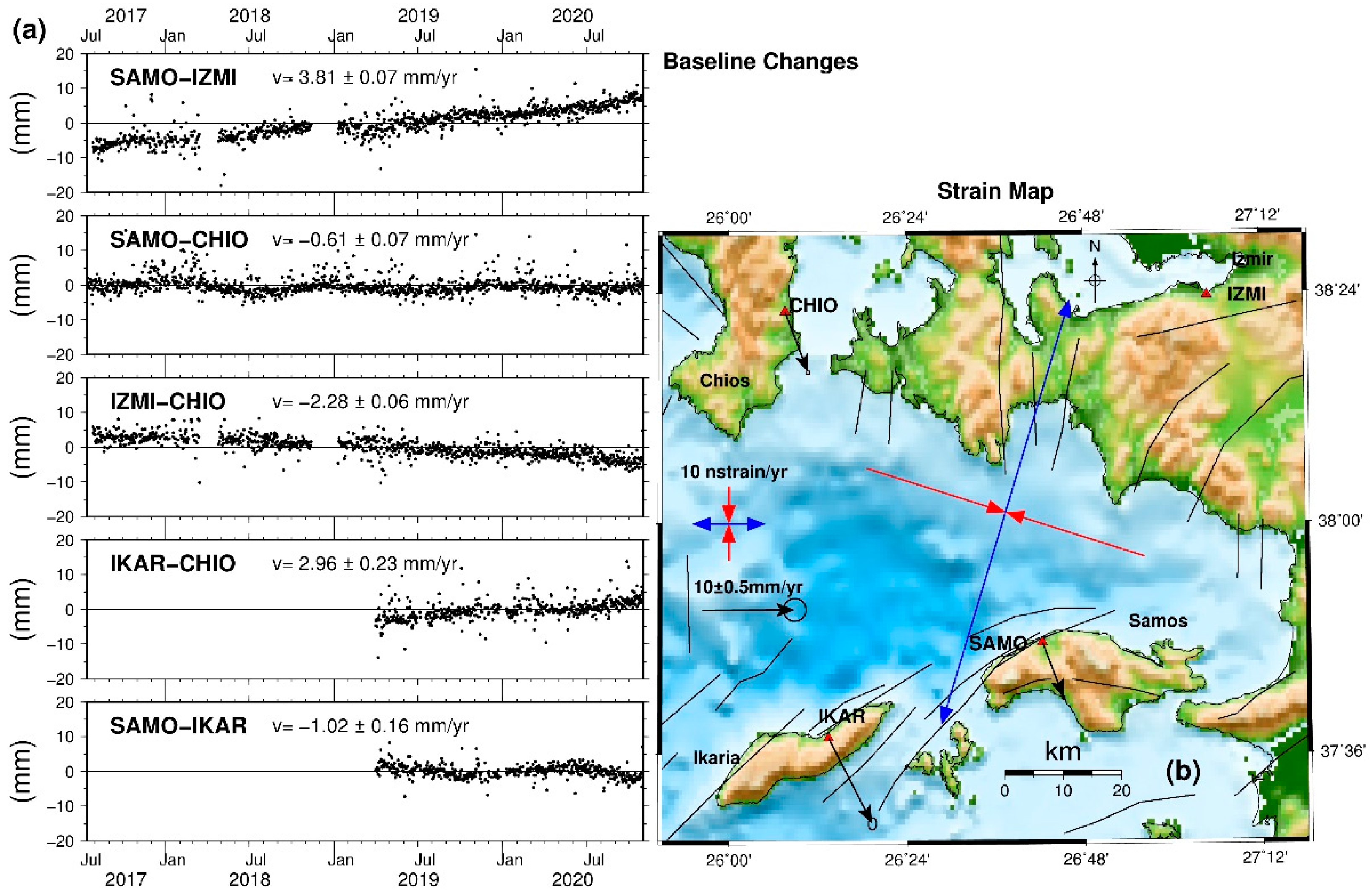
3.1. Pre-Seismic Period
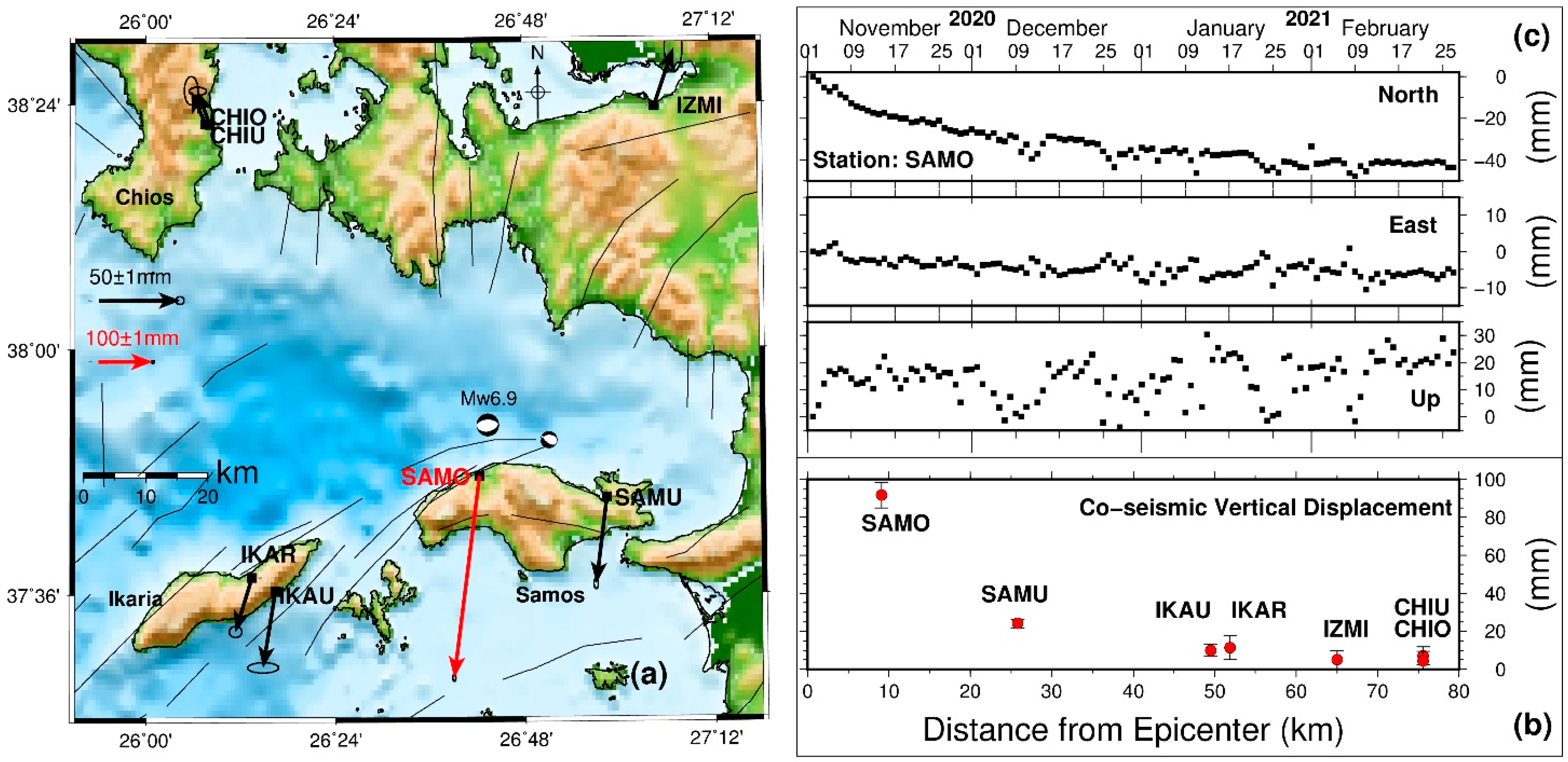
3.2. Co-Seismic Period
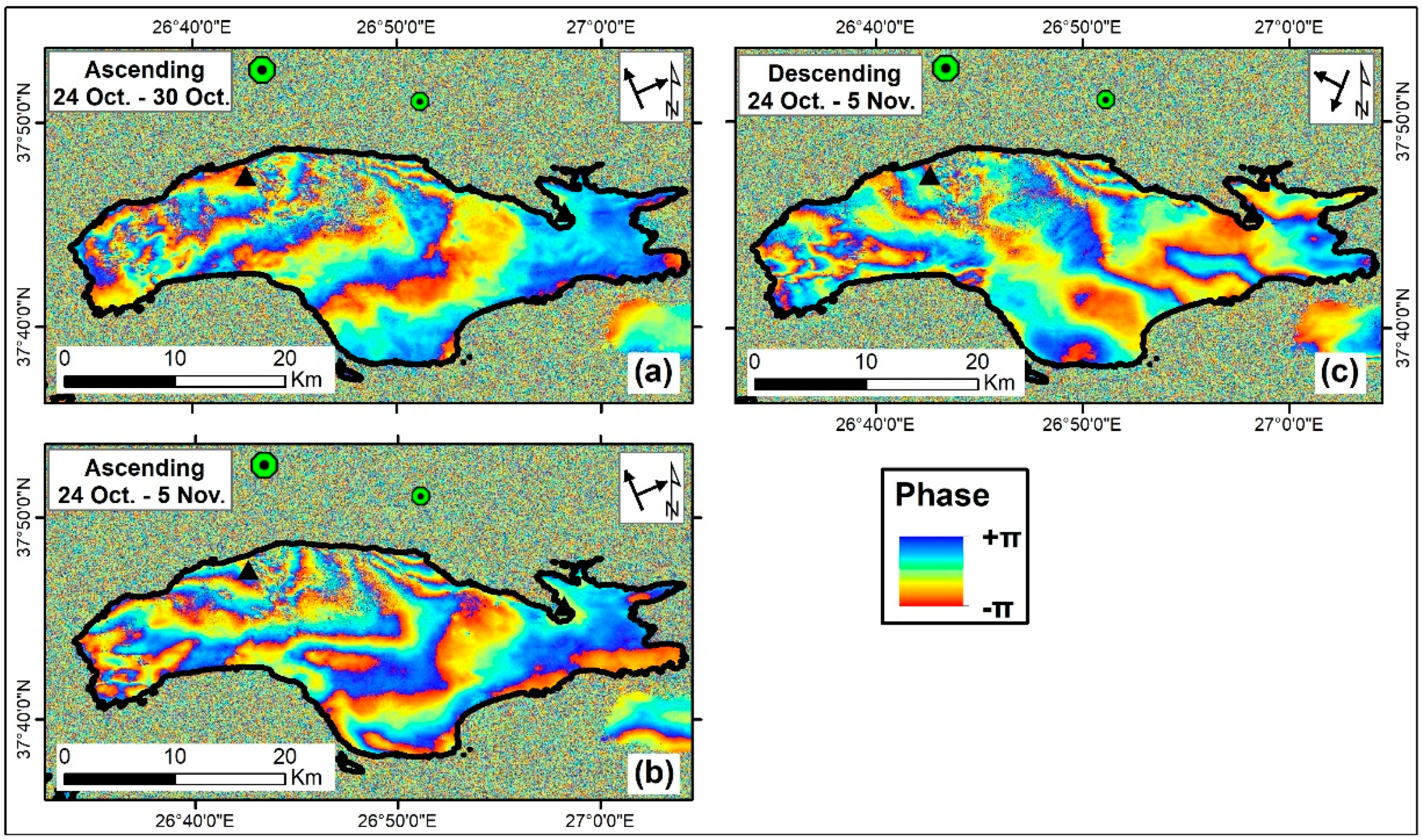
4. InSAR Data
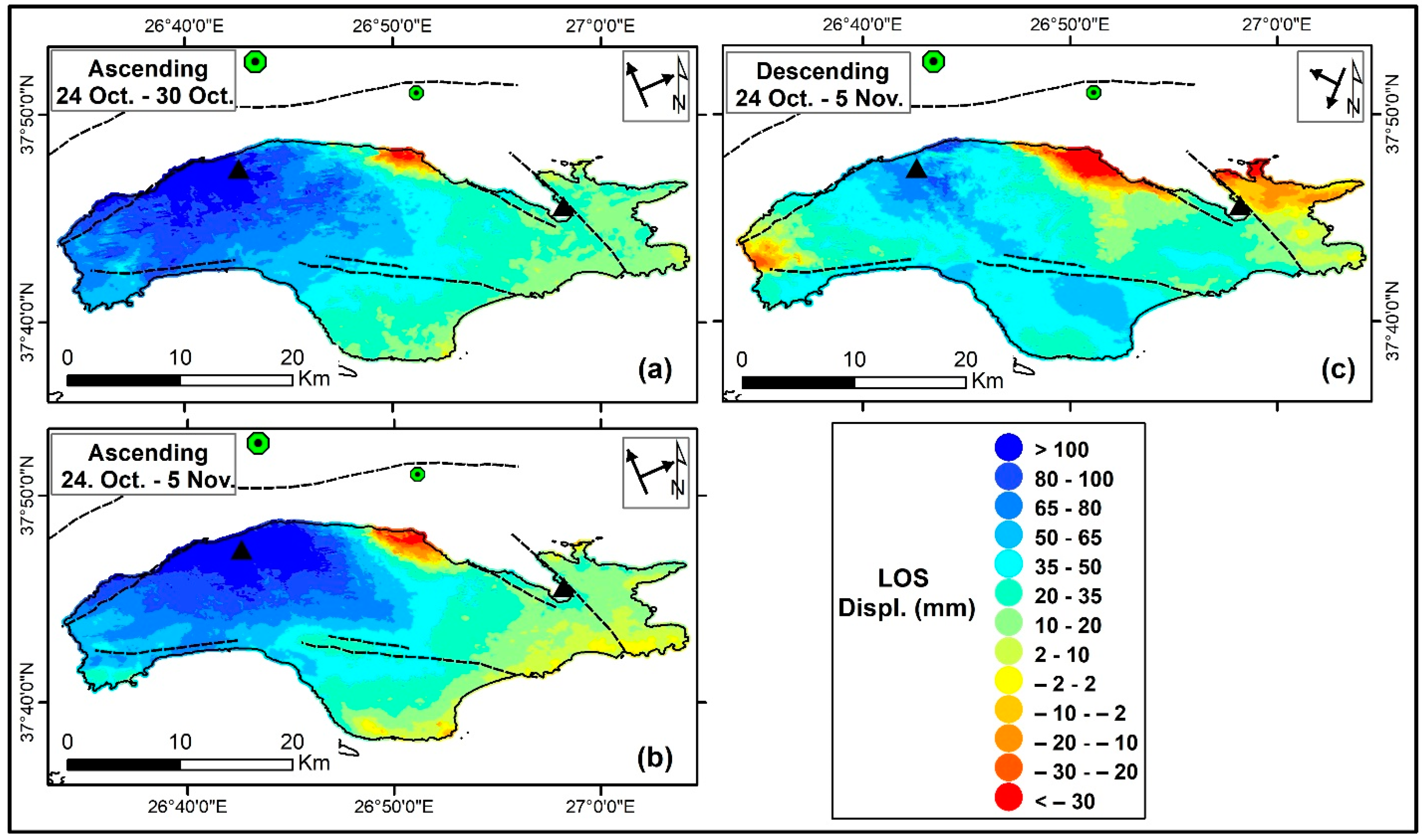
4.1. LOS Displacement Vector
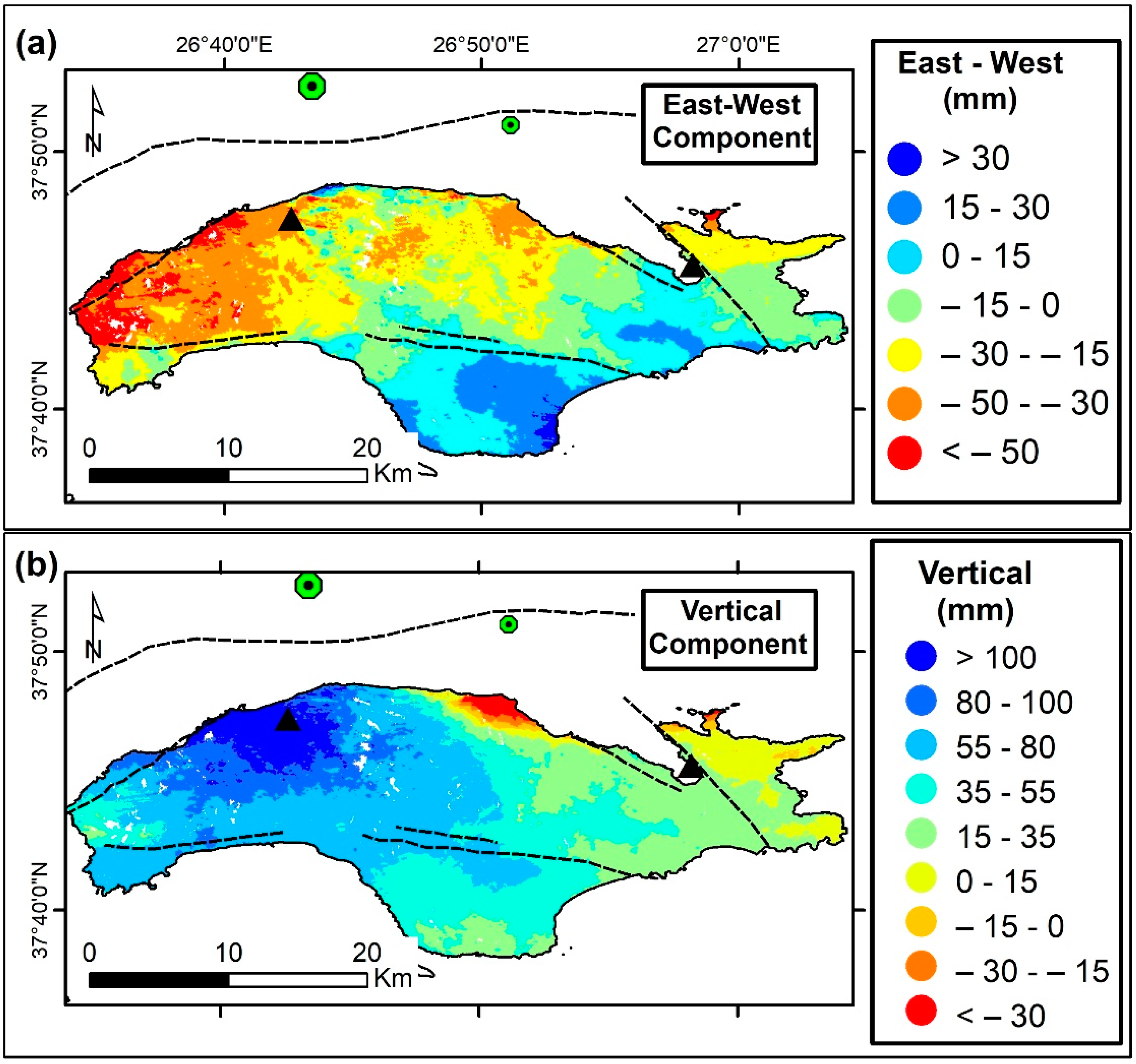
4.2. Decomposition of LOS Vector
5. Fault Modelling
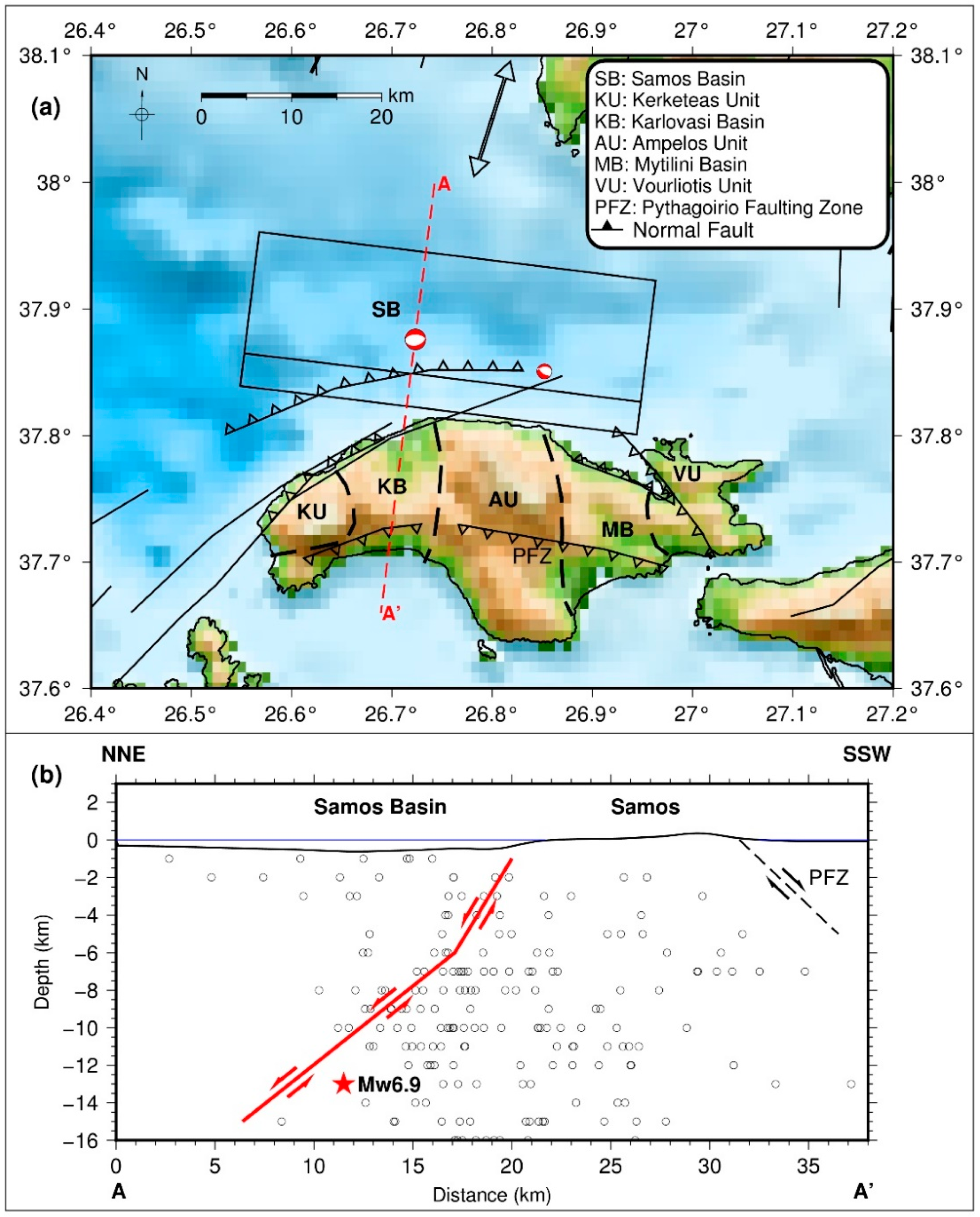
5.1. Fault Geometry
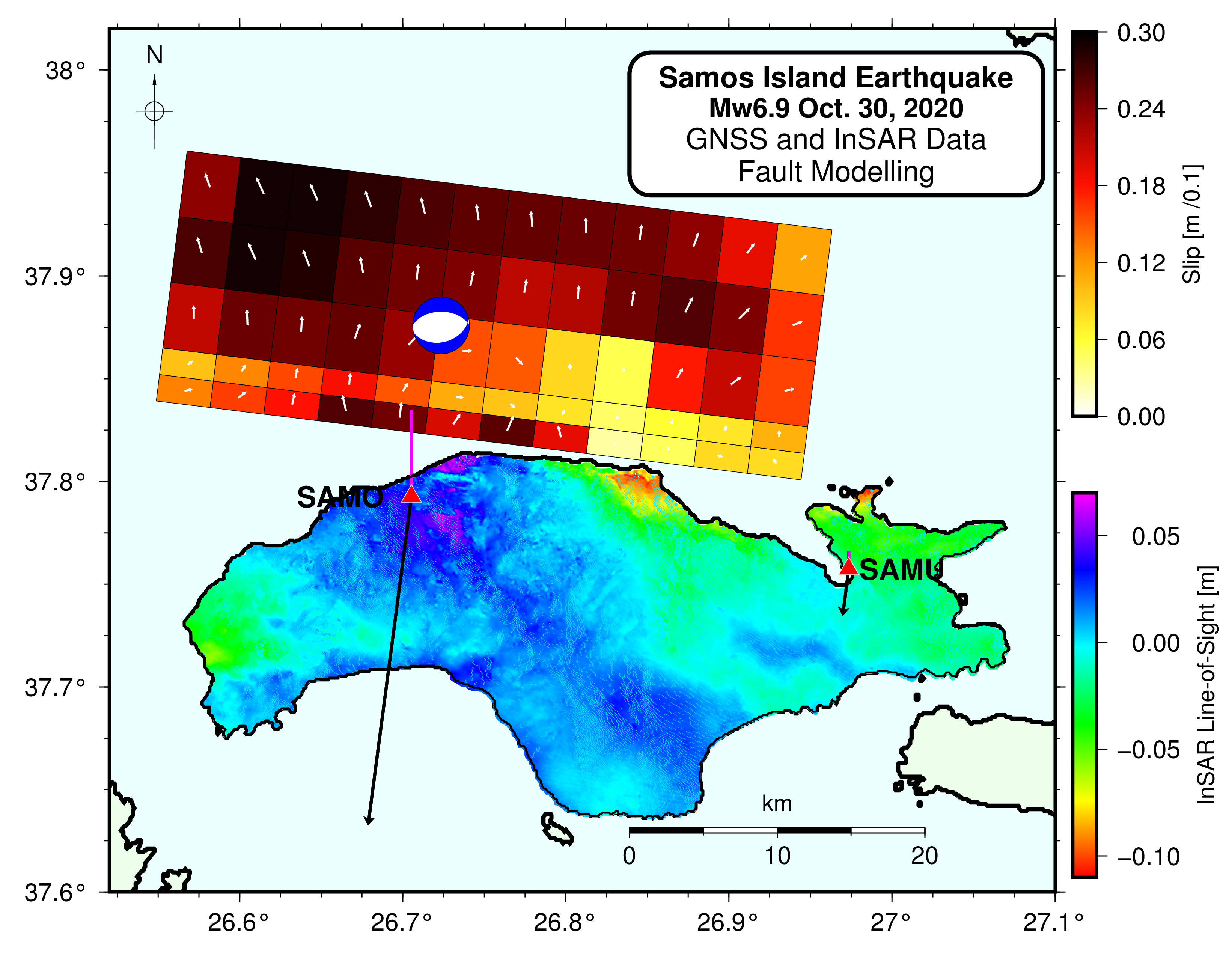
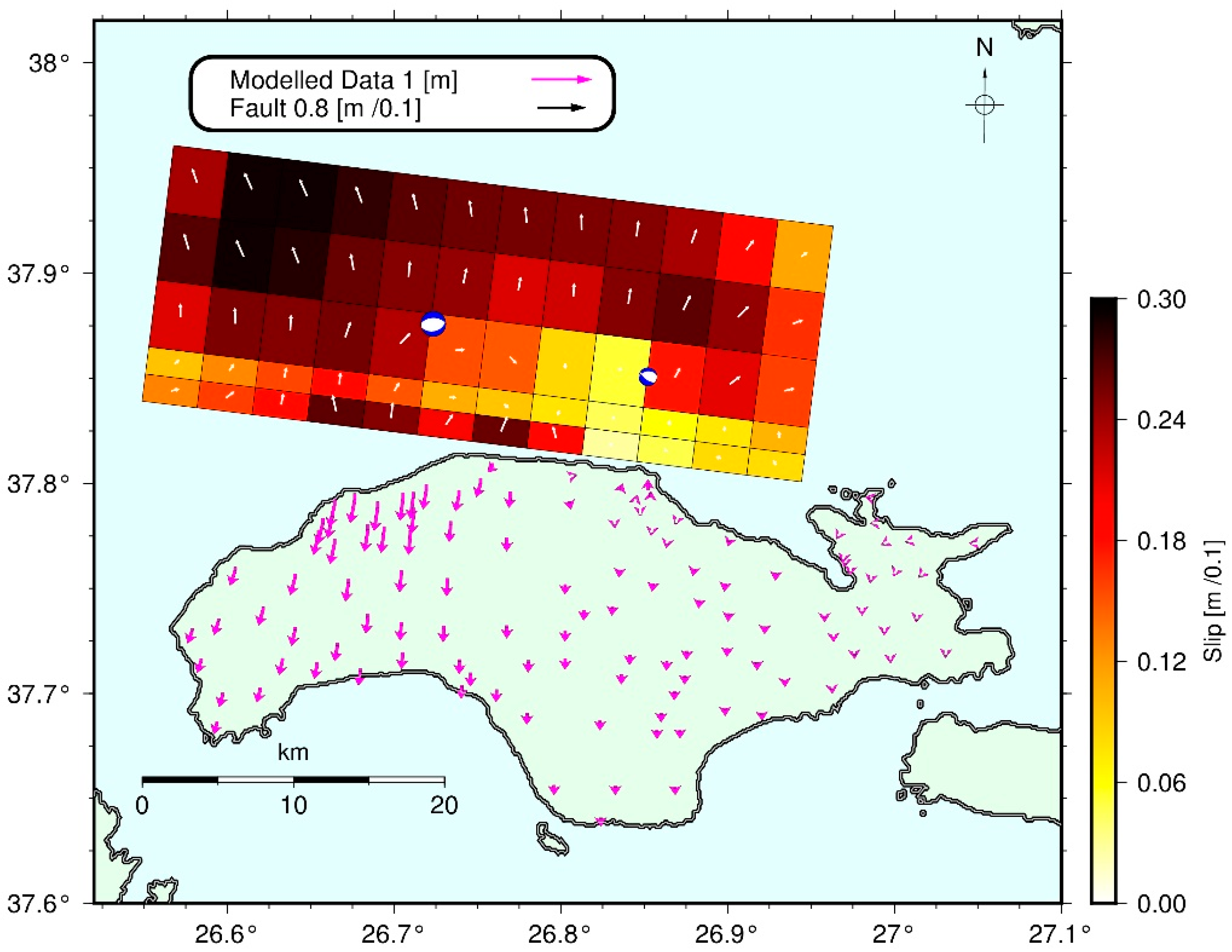
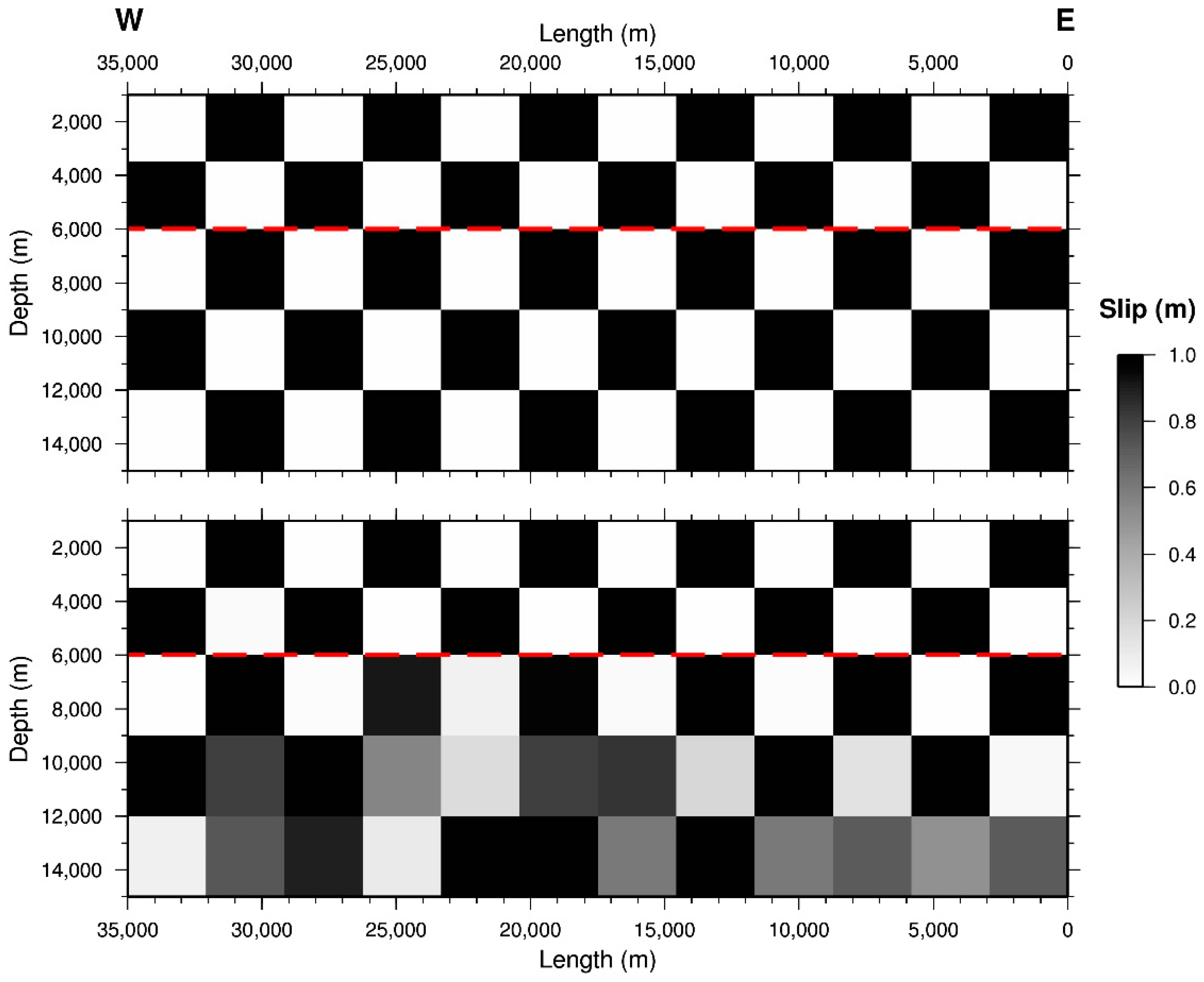
5.2. Slip Distribution
6. Discussion
6.1. Regional Deformational Characteristics
6.2. Local Deformational Characteristics
7. Conclusions
Supplementary Materials
Funding
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
Appendix C

References
- Çirmik, A.; Doğru, F.; Gönenç, T.; Pamukçu, O. The Stress/Strain Analysis of Kinematic Structure at Gülbahçe Fault and Uzunkuyu Intrusive (İzmir, Turkey). Pure Appl. Geophys. 2017, 174, 1425–1440. [Google Scholar] [CrossRef]
- D’Agostino, N.; Métois, M.; Koci, R.; Duni, L.; Kuka, N.; Ganas, A.; Georgiev, I.; Jouanne, F.; Kaludjerovic, N.; Kandić, R. Active crustal deformation and rotations in the southwestern Balkans from continuous GPS measurements. Earth Planet. Sci. Lett. 2020, 539, 116246. [Google Scholar] [CrossRef]
- Reilinger, R.; McClusky, S.; Paradissis, D.; Ergintav, S.; Vernant, P. Geodetic constraints on the tectonic evolution of the Aegean region and strain accumulation along the Hellenic subduction zone. Tectonophysics 2010, 488, 22–30. [Google Scholar] [CrossRef]
- Le Pichon, X.; Kreemer, C. The miocene-to-present kinematic evolution of the eastern mediterranean and middle east and its implications for dynamics. Annu. Rev. Earth Planet. Sci. 2010, 38, 323–351. [Google Scholar] [CrossRef]
- Roumelioti, Z.; Kiratzi, A.; Melis, N. Relocation of the 26 July 2001 Skyros Island (Greece) earthquake sequence using the double-difference technique. Phys. Earth Planet. Inter. 2003, 138, 231–239. [Google Scholar] [CrossRef]
- Kreemer, C.; Chamot-Rooke, N.; Le Pichon, X. Constraints on the evolution and vertical coherency of deformation in the Northern Aegean from a comparison of geodetic, geologic and seismologic data. Earth Planet. Sci. Lett. 2004, 225, 329–346. [Google Scholar] [CrossRef]
- Kreemer, C.; Holt, W.E.; Haines, A.J. An integrated global model of present-day plate motions and plate boundary deformation. Geophys. J. Int. 2003, 154, 8–34. [Google Scholar] [CrossRef]
- Müller, M.; Geiger, A.; Kahle, H.-G.; Veis, G.; Billiris, H.; Paradissis, D.; Felekis, S. Velocity and deformation fields in the North Aegean domain, Greece, and implications for fault kinematics, derived from GPS data 1993–2009. Tectonophysics 2013, 597–598, 34–49. [Google Scholar] [CrossRef]
- Coskun, S.; Dondurur, D.; Cifci, G.; Aydemir, A.; Gungor, T.; Drahor, M.G. Investigation on the tectonic significance of Izmir, Uzunada Fault Zones and other tectonic elements in the Gulf of Izmir, western Turkey, using high resolution seismic data. Mar. Pet. Geol. 2017, 83, 73–83. [Google Scholar] [CrossRef]
- Schmid, S.M.; Fügenschuh, B.; Kounov, A.; Maţenco, L.; Nievergelt, P.; Oberhänsli, R.; Pleuger, J.; Schefer, S.; Schuster, R.; Tomljenović, B.; et al. Tectonic units of the Alpine collision zone between Eastern Alps and western Turkey. Gondwana Res. 2020, 78, 308–374. [Google Scholar] [CrossRef]
- Ring, U.; Okrusch, M.; Will, T. Samos Island, Part I: Metamorphosed and non-metamorphosed nappes, and sedimentary basins. J. Virtual Explor. 2007, 27, 5. [Google Scholar] [CrossRef]
- Roche, V.; Jolivet, L.; Papanikolaou, D.; Bozkurt, E.; Menant, A.; Rimmelé, G. Slab fragmentation beneath the Aegean/Anatolia transition zone: Insights from the tectonic and metamorphic evolution of the Eastern Aegean region. Tectonophysics 2019, 754, 101–129. [Google Scholar] [CrossRef]
- Ring, U.; Laws, S.; Bernet, M. Structural analysis of a complex nappe sequence and late-orogenic basins from the Aegean Island of Samos, Greece. J. Struct. Geol. 1999, 21, 1575–1601. [Google Scholar] [CrossRef]
- Nomikou, P.; Evangelidis, D.; Papanikolaou, D.; Lampridou, D.; Litsas, D.; Tsaparas, Y.; Koliopanos, I. Morphotectonic Analysis along the Northern Margin of Samos Island, Related to the Seismic Activity of October 2020, Aegean Sea, Greece. Geosciences 2021, 11, 102. [Google Scholar] [CrossRef]
- Chatzipetros, A.; Kiratzi, A.; Sboras, S.; Zouros, N.; Pavlides, S. Active faulting in the north-eastern Aegean Sea Islands. Tectonophysics 2013, 597–598, 106–122. [Google Scholar] [CrossRef]
- Kokkalas, S.; Aydin, A. Is there a link between faulting and magmatism in the south-central Aegean Sea? Geol. Mag. 2013, 150, 193–224. [Google Scholar] [CrossRef]
- Sakellariou, D.; Tsampouraki-Kraounaki, K. Plio-quaternary extension and strike-slip tectonics in the Aegean. Transform. Plate Boundaries Fract. Zones 2018, 339, 374. [Google Scholar]
- Kassaras, I.; Kapetanidis, V.; Ganas, A.; Tzanis, A.; Kosma, C.; Karakonstantis, A.; Valkaniotis, S.; Chailas, S.; Kouskouna, V.; Papadimitriou, P. The New Seismotectonic Atlas of Greece (v1.0) and Its Implementation. Geosciences 2020, 10, 447. [Google Scholar] [CrossRef]
- Papadimitriou, P.; Kassaras, I.; Kaviris, G.; Tselentis, G.-A.; Voulgaris, N.; Lekkas, E.; Chouliaras, G.; Evangelidis, C.; Pavlou, K.; Kapetanidis, V.; et al. The 12th June 2017 Mw=6.3 Lesvos earthquake from detailed seismological observations. J. Geodyn. 2018, 115, 23–42. [Google Scholar] [CrossRef]
- Ganas, A.; Elias, P.; Kapetanidis, V.; Valkaniotis, S.; Briole, P.; Kassaras, I.; Argyrakis, P.; Barberopoulou, A.; Moshou, A. The July 20, 2017 M6.6 Kos Earthquake: Seismic and Geodetic Evidence for an Active North-Dipping Normal Fault at the Western End of the Gulf of Gökova (SE Aegean Sea). Pure Appl. Geophys. 2019, 176, 4177–4211. [Google Scholar] [CrossRef]
- Sakkas, V.; Lagios, E. Fault modelling of the early-2014 ~M6 Earthquakes in Cephalonia Island (W. Greece) based on GPS measurements. Tectonophysics 2015, 644, 184–196. [Google Scholar] [CrossRef]
- Lagios, E.; Sakkas, V.; Novali, F.; Bellotti, F.; Ferretti, A.; Vlachou, K.; Dietrich, V. SqueeSAR™ and GPS ground deformation monitoring of Santorini Volcano (1992–2012): Tectonic implications. Tectonophysics 2013, 594, 38–59. [Google Scholar] [CrossRef]
- Lagios, E.; Papadimitriou, P.; Novali, F.; Sakkas, V.; Fumagalli, A.; Vlachou, K.; Del Conte, S. Combined Seismicity Pattern Analysis, DGPS and PSInSAR studies in the broader area of Cephalonia (Greece). Tectonophysics 2012, 524–525, 43–58. [Google Scholar] [CrossRef]
- Papadimitriou, P.; Kapetanidis, V.; Karakonstantis, A.; Spingos, I.; Kassaras, I.; Sakkas, V.; Kouskouna, V.; Karatzetzou, A.; Pavlou, K.; Kaviris, G.; et al. First Results on the Mw = 6.9 Samos Earthquake of 30 October 2020. Bull. Geol. Soc. Greece 2020, 56, 251–279. [Google Scholar] [CrossRef]
- Greece Earthquake Catalogue Search. Available online: http://www.geophysics.geol.uoa.gr (accessed on 23 April 2021).
- Geodynamics Institute of the National Observatory of Athens (GI-NOA). Available online: www.gein.noa.gr (accessed on 23 April 2021).
- Turkish Disaster and Emergency Management Presidency AFAD. Available online: https://deprem.afad.gov.tr (accessed on 23 April 2021).
- Klein, F.W. User’s guide to HYPOINVERSE-2000: A Fortran program to solve for earthquake locations and magnitudes. U.S. Geol. Surv. Prof. Pap 2002, 1–123. [Google Scholar] [CrossRef]
- Karakonstantis, A. 3-D simulation of Crust and Upper Mantle Structure in the Broader Hellenic Area through Seismic Tomography. Ph.D. Thesis, National and Kapodistrian University of Athens, Athens, Greece, 2017. [Google Scholar]
- Waldhauser, F. HypoDD-A Program to Compute Double-Difference Hypocenter Locations. U.S. Geol. Surv. Open File Rep. 2001, 25. [Google Scholar] [CrossRef]
- Caporali, A.; Floris, M.; Chen, X.; Nurce, B.; Bertocco, M.; Zurutuza, J. The November 2019 seismic sequence in Albania: Geodetic constraints and fault interaction. Remote Sens. 2020, 12, 846. [Google Scholar] [CrossRef]
- He, Z.; Chen, T.; Wang, M.; Li, Y. Multi-segment rupture model of the 2016 Kumamoto earthquake revealed by InSAR and GPS data. Remote Sens. 2020, 12, 3721. [Google Scholar] [CrossRef]
- Tzanis, A.; Chailas, S.; Sakkas, V.; Lagios, E. Tectonic Deformation in the Santorini Volcanic Complex (Greece) as inferred by joint analysis of Gravity, Magnetotelluric and DGPS Observations. Geophys. J. Int. 2020, 220, 461–489. [Google Scholar] [CrossRef]
- Boixart, G.; Cruz, L.F.; Cruz, R.M.; Euillades, P.A.; Euillades, L.D.; Battaglia, M. Source model for Sabancaya Volcano constrained by DInSAR and GNSS surface deformation observation. Remote Sens. 2020, 12, 1852. [Google Scholar] [CrossRef]
- Gatsios, T.; Cigna, F.; Tapete, D.; Sakkas, V.; Pavlou, K.; Parcharidis, I. Copernicus sentinel-1 MT-InSAR, GNSS and seismic monitoring of deformation patterns and trends at the Methana Volcano, Greece. Appl. Sci. 2020, 10, 6445. [Google Scholar] [CrossRef]
- HexagonSmartNet METRICA S.A. Available online: https://hxgnsmartnet.com (accessed on 23 April 2021).
- URANUS Net. Available online: http://www.uranus.gr (accessed on 23 April 2021).
- Onder Cetin, K.; Mylonakis, G.; Sextos, A.; Stewart, J.P. Seismological and Engineering Effects of the M 7.0 Samos Island (Aegean Sea) Earthquake; Hellenic Association of Earthquake Engineering: Athens, Greece, 2020. [Google Scholar]
- Lekkas, E.; Mavroulis, S.; Gogou, M.; Papadopoulos, G.A.; Triantafyllou, I.; Katsetsiadou, K.-N.; Kranis, H.; Skourtsos, E.; Carydis, P.; Voulgaris, N.; et al. The October 30, 2020, Mw 6.9 Samos (Greece) earthquake. Newsl. Environ. Disaster Cris. Manag. Strateg. 2020, 21, 1–156. [Google Scholar]
- EUREF Permanent GNSS Network–Station Log. Available online: https://www.epncb.oma.be/ftp/station/log_9char/izmi00tur_20201111.log (accessed on 23 April 2021).
- Dach, R.; Lutz, S.; Walser, P.; Fridez, P. Bernese GNSS Software Version 5.2; User Manual; Astronomical Institute, University of Bern, Bern Open Publishing: Bern, Switzerland, 2015. [Google Scholar]
- Nocquet, J.-M. Present-day kinematics of the Mediterranean: A comprehensive overview of GPS results. Tectonophysics 2012, 579, 220–242. [Google Scholar] [CrossRef]
- Pesci, A.; Teza, G. Strain rate analysis over the central Apennines from GPS velocities: The development of a new free software. Boll. Di Geod. E Sci. Affin. 2007, 56, 69–88. [Google Scholar]
- Hanssen, R.F. Radar Interferometry: Data Interpretation and Error Analysis; Kluwer Academic Publishers: Dordrecht, The Netherlands, 2001. [Google Scholar]
- Comerci, V.; Vittori, E. The Need for a Standardized Methodology for Quantitative Assessment of Natural and Anthropogenic Land Subsidence: The Agosta (Italy) Gas Field Case. Remote Sens. 2019, 11, 1178. [Google Scholar] [CrossRef]
- Farolfi, G.; Del Soldato, M.; Bianchini, S.; Casagli, N. A procedure to use GNSS data to calibrate satellite PSI data for the study of subsidence: An example from the north-western Adriatic coast (Italy). Eur. J. Remote Sens. 2019, 52, 54–63. [Google Scholar] [CrossRef]
- Farolfi, G.; Bianchini, S.; Casagli, N. Integration of GNSS and Satellite InSAR Data: Derivation of Fine-Scale Vertical Surface Motion Maps of Po Plain, Northern Apennines, and Southern Alps, Italy. IEEE Trans. Geosci. Remote. Sens. 2019, 57, 319–328. [Google Scholar] [CrossRef]
- Dai, K.; Liu, G.; Li, Z.; Li, T.; Yu, B.; Wang, X.; Singleton, A. Extracting vertical displacement rates in Shanghai (China) with multi-platform SAR images. Remote Sens. 2015, 7, 9542–9562. [Google Scholar] [CrossRef]
- Fuhrmann, T.; Garthwaite, M.C. Resolving three-dimensional surface motion with InSAR: Constraints from multi-geometry data fusion. Remote Sens. 2019, 11, 241. [Google Scholar] [CrossRef]
- Chen, T.; Newman, A.V.; Feng, L.; Fritz, H.M. Slip distribution from the 1 April 2007 Solomon Islands earthquake: A unique image of near-trench rupture. Geophys. Res. Lett. 2009, 36, L16307. [Google Scholar] [CrossRef]
- Feng, L.; Newman, A.V.; Protti, M.; González, V.; Jiang, Y.; Dixon, T.H. Active deformation near the Nicoya Peninsula, northwestern Costa Rica, between 1996 and 2010: Interseismic megathrust coupling. J. Geophys. Res. 2012, 117, B06407. [Google Scholar] [CrossRef]
- GTdef. Available online: https://avnewman.github.io/GTDef/ (accessed on 8 March 2021).
- Valkaniotis, S.; Briole, P.; Ganas, A.; Elias, P.; Kapetanidis, V.; Tsironi, V.; Fokaefs, A.; Partheniou, H.; Paschos, P. The Mw = 5.6 Kanallaki earthquake of 21 March 2020 in west Epirus, Greece: Reverse fault model from InSAR data and seismotectonic implications for Apulia-Eurasia collision. Geosciences 2020, 10, 454. [Google Scholar] [CrossRef]
- Thingbaijam, K.K.S.; Mai, P.M.; Goda, K. New empirical earthquake source-scaling laws. Bull. Seismol. Soc. Am. 2017, 107, 2225–2246. [Google Scholar] [CrossRef]
- Triantafyllou, I.; Gogou, M.; Mavroulis, S.; Lekkas, E.; Papadopoulos, G.A.; Thravalos, M. The Tsunami Caused by the 30 October 2020 Samos (Aegean Sea) Mw7.0 Earthquake: Hydrodynamic Features, Source Properties and Impact Assessment from Post-Event Field Survey and Video Records. J. Mar. Sci. Eng. 2021, 9, 68. [Google Scholar] [CrossRef]
- USGS Earthquakes Hazards Program. Available online: https://earthquake.usgs.gov/earthquakes/ (accessed on 23 April 2021).
- GFZ GEOFON. Available online: http://geofon.gfz-potsdam.de/eqinfo/ (accessed on 23 April 2021).
- Global CMT Web Page. Available online: https://www.globalcmt.org (accessed on 23 April 2021).
- Wells, D.I.; Coppersmith, K.J. New empirical relationships among magnitude, rupture length, rupture area and surface displacement. Bull. Seismol. Soc. Am. 1994, 84, 974–1002. [Google Scholar]
- Evelpidou, N.; Karkani, A.; Kampolis, I. Relative Sea Level Changes and Morphotectonic Implications Triggered by the Samos Earthquake of 30th October 2020. J. Mar. Sci. Eng. 2021, 9, 40. [Google Scholar] [CrossRef]
- Pischiutta, M.; Akinci, A.; Tinti, H.A. Broad-band ground-motion simulation of 2016 Amatrice earthquake, Central Italy. Geophys. J. Int. 2021, 224, 1753–1779. [Google Scholar] [CrossRef]
- Wessel, P.; Smith, W.H.F.; Scharroo, R.; Luis, J.; Wobbe, F. Generic Mapping Tools: Improved Version Released. Eos Trans. Agu 2013, 94, 409–410. [Google Scholar] [CrossRef]
- Zumberge, J.; Heflin, M.; Jefferson, D.; Watkins, M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Métois, M.; D’Agostino, N.; Avallone, A.; Chamot-Rooke, N.; Rabaute, A.; Duni, L.; Kuka, N.; Koci, R.; Georgiev, I. Insights on continental collisional processes from GPS data: Dynamics of the peri-Adriatic belts. J. Geophys. Res. Solid Earth 2015, 120, 8701–8719. [Google Scholar] [CrossRef]
- Nykiel, G.; Wolak, P.; Figurski, M. Atmospheric opacity estimation based on IWV derived from GNSS observations for VLBI applications. Gps Solut. 2018, 22, 9. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mw6.9 | Mw5.0 | |
|---|---|---|
| Date | 30 October 2020 | 30 October 2020 |
| Time (UTC) | 11:51 | 15:14 |
| Latitude (°N) | 37.8759 | 37.8507 |
| Longitude (°E) | 26.7235 | 26.8522 |
| Depth (km) | 13 | 15 |
| Strike (°) CWN | 270 | 264 |
| Dip (°) | 50 | 37 |
| Rake (°) | −81 | −126 |
| Seismic Moment (N-m) | 2.81 × 1019 | 3.9 × 1016 |
| Station | Longitude (°) | Latitude (°) | DE (mm) | DN (mm) | DU (mm) | STDVE (mm) | STDVN (mm) | STDVU (mm) |
|---|---|---|---|---|---|---|---|---|
| SAMO | 26.7053 | 37.7928 | −48.94 | −371.27 | 91.70 | 1.15 | 2.75 | 6.71 |
| SAMU | 26.9735 | 37.7575 | −6.95 | −53.27 | 24.10 | 0.52 | 1.29 | 2.27 |
| IKAR | 26.2242 | 37.6282 | −10.22 | −33.16 | 11.35 | 1.58 | 1.37 | 6.28 |
| IKAU | 26.2733 | 37.6054 | −7.69 | −46.65 | 10.03 | 3.87 | 1.30 | 3.19 |
| CHIO | 26.1272 | 38.3679 | −8.75 | 20.59 | 7.10 | 1.72 | 3.53 | 4.71 |
| CHIU | 26.1360 | 38.3665 | −7.30 | 20.83 | 4.44 | 2.19 | 1.01 | 4.92 |
| IZMI | 27.0818 | 38.3948 | 12.21 | 35.20 | 5.03 | 2.20 | 6.05 | 4.71 |
| Pairs | 24 October–30 October 2020 | 24 October–5 November 2020 | 24 October–5 November 2020 |
|---|---|---|---|
| Sensor | S1B-S1A | S1B-S1B | S1A-S1A |
| Orbit | Ascending | Ascending | Descending |
| Track | 131 | 131 | 36 |
| B┴ (m) * | 36.03 | 22.83 | 45.47 |
| BT (time) ** | 4 h 13 min | 6 days | 6 days |
| Incidence Angle, θ (°) | 36.8513 | 33.7412 | 41.5633 |
| Azimuth Angle, φ (°) CWN | 349 | 349 | 191 |
| Location 1 | Length (km) | Width (km) | Strike (°) (CWN) | Dip (°) | Burial Depth (km) | Locking Depth (km) | Geodetic Moment (N-m) |
|---|---|---|---|---|---|---|---|
| 26.9435° E | 35 ± 3 | 19.7 | 277 ± 3 | 1.0 ± 0.3 | 15.0 ± 3.0 | 3.67 × 1019 | |
| 37.7956° N | |||||||
| Upper Segment | 5.7 | 60 ± 3 | 1.0 ± 0.3 | 6.0 ± 0.5 | 1.01 × 1019 | ||
| Lower Segment | 14.0 | 40 ± 5 | 6.0 ± 0.5 | 15.0 ± 3.0 | 2.66 × 1019 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sakkas, V. Ground Deformation Modelling of the 2020 Mw6.9 Samos Earthquake (Greece) Based on InSAR and GNSS Data. Remote Sens. 2021, 13, 1665. https://doi.org/10.3390/rs13091665
Sakkas V. Ground Deformation Modelling of the 2020 Mw6.9 Samos Earthquake (Greece) Based on InSAR and GNSS Data. Remote Sensing. 2021; 13(9):1665. https://doi.org/10.3390/rs13091665
Chicago/Turabian StyleSakkas, Vassilis. 2021. "Ground Deformation Modelling of the 2020 Mw6.9 Samos Earthquake (Greece) Based on InSAR and GNSS Data" Remote Sensing 13, no. 9: 1665. https://doi.org/10.3390/rs13091665
APA StyleSakkas, V. (2021). Ground Deformation Modelling of the 2020 Mw6.9 Samos Earthquake (Greece) Based on InSAR and GNSS Data. Remote Sensing, 13(9), 1665. https://doi.org/10.3390/rs13091665