1. Introduction
Unlike the conventional active radar system, passive radar system capitalizes on the signals of opportunity already existing in the environment. The absence of a dedicated transmitter makes it low-cost and contributes to its anti-jamming capability [
1,
2]. Besides, the remarkable advantage of no electromagnetic pollution leads to its extensive applications. In recent years, with the increasing quantity and variety of opportunistic sources, there is a significant growth of interest in passive radar system [
3].
Many types of terrestrial sources of opportunity have been investigated in passive radar, such as FM radio, digital audio/video broadcast, and Wi-Fi [
4,
5,
6]. However, owing to the confined transmitter positions and their original intentions, the coverages of terrestrial sources are restrained, which limits their application scenarios of the passive radar system.
Compared with the sources above, the utilization of global navigation satellite system (GNSS) availably extends the signal coverage to global scale for the passive radar system. Thus, GNSS-based passive radar shows its potential for the monitoring of sea areas which are not fully covered by the terrestrial sources [
7]. In addition, GNSS provides a relatively large signal bandwidth, which is beneficial for the target detection capability [
8,
9,
10]. Moreover, the most unique feature of GNSS is that any point on the Earth is assured to be simultaneously illuminated by 4–8 satellites in a single GNSS constellation from different angles. The number can be up to 32 if the four GNSS constellations (i.e., GPS, GLONASS, Galileo, and BeiDou) are fully in service, providing a large selection of opportunistic transmitters for passive radar system [
11].
Due to the limited emitting power and the greatly long irradiation distance, the most intractable obstruction for the GNSS-based passive radar is its exceedingly low-power density near the Earth’s surface (as low as −135 dBW/m
2 [
12]). In order to increase the signal-to-noise ratio (SNR) for a reliable target detection performance, an effective approach is to integrate the target energy over a long time. With respect to the GNSS-based passive radar, the integration time usually needs to be lengthened to several tens of seconds [
13], especially in the case of an extreme SNR such as a low radar cross section (RCS) target or a large radar detection range. However, this paper focuses on the GNSS-based passive radar vessel target detection under the condition of such extreme SNR. The target motion leads to two severe problems that impede the long-time integration. First, the aspect angle of the target varies with time, which causes the decorrelation throughout a long dwell time. Thus, the entire long-time echo is no longer coherent. Furthermore, the conspicuous range and Doppler migrations occur in the echo due to the translation motions of the vessel target and the satellite transmitter. Particularly, when the integration time is in the order of several tens of seconds, the migrations become more intricate. In addition, the oscillation and rotation motions of the vessel target in practice introduce an additional Doppler migration [
14]. Usually, the detected vessel target is noncooperative. The inaccessible motion parameters increase the difficulty in the accurate compensation of the migrations.
With respect to the vessel target detection, currently, many researchers focus on the artificial intelligence (AI)-based detection methods [
15,
16,
17,
18,
19]. The vessel detection is performed on synthetic aperture radar (SAR) or optical remote sensing imagery, and the vessel target is recognized and classified via a deep learning algorithm. In the field of radar target detection, there are also several literatures on the detection of vessel using the GNSS-based passive radar, which try to achieve the long-time integration of target echo after properly handling the aforementioned problems. First, to cope with the noncoherence characteristic of the entire echo, an effective approach is to adopt the hybrid integration strategy, which is commonly used in the pre-existing literature and in this paper. That is, the entire echo is segmented into temporal frames with frame duration in the order of 2–3 s [
13]. The signal inside each frame is regard as correlated, thus coherent integration can be performed, followed by the noncoherent integration of multiple frames. In reference [
20], a long-time integration method based on the keystone transform and the fractional Fourier transform (FrFT) is proposed for the target moving with a constant velocity. However, only the linear range migration and linear Doppler migration over the entire echo can be well compensated by means of these two transforms. In reference [
21], the coherent integration of each frame is performed by means of the Fourier transform along the azimuth direction. After compensation of the range and Doppler migrations with a tested Doppler frequency rate (DFR) value, the noncoherent integration of the multiple frames is performed. Nevertheless, the range and Doppler migrations are regarded as negligible inside frame duration, and only the linear Doppler migration is considered over the entire integration time. Therefore, the integration effectiveness of this method is possibly unsatisfactory. In reference [
22], the coherent integration performed in the same way with [
21]. In addition, the compensation of range and Doppler migrations between different frames is achieved in the local plane with a tested target velocity. However, this method suffers for an ambiguity problem between the target’s position and velocity.
In this paper, we focus on the vessel target detection using BeiDou-based passive radar consisting of a BeiDou satellite of opportunity and a fixed receiver. The hybrid constellation of BeiDou system provides more options on opportunistic illuminator for the passive radar system [
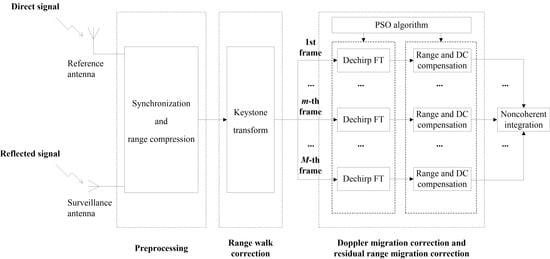
23]. It is observed that in the pre-existing integration methods, only the low-order range and Doppler migrations can be corrected, which constrains the integration time of the target echo and limits the target detection application. By contrast, this paper proposes a long-time optimized integration method for BeiDou-based passive radar vessel target detection, which aims at accurately compensating the high-order migrations and maximizing the SNR. First, the keystone transform is applied to eliminate the range walk. To cope with the noncoherence of entire target, the range migration-corrected data are then segmented into temporal frames and the hybrid integration strategy is adopted. In order to remove the residual range migration, and simultaneously correct the Doppler migration inside each frame and compensate for the Doppler shift at different frames, the long-time integration is modeled as an optimization problem, where the decision variables are the corresponding Doppler centroids (DCs) and DFRs of multiple frames. Finally, the optimization problem is solved by the particle swarm optimization (PSO) algorithm. After that, the final integrated result provides a reliable vessel target detection performance.
The remaining parts of the paper are organized as follows. The echo model of the vessel target is deduced in
Section 2. The proposed method is presented in
Section 3. The effectiveness of the method is demonstrated via the simulated and experimental results in
Section 4. Finally, in
Section 5, we draw our conclusions.
2. Echo Model and Characteristic Analysis
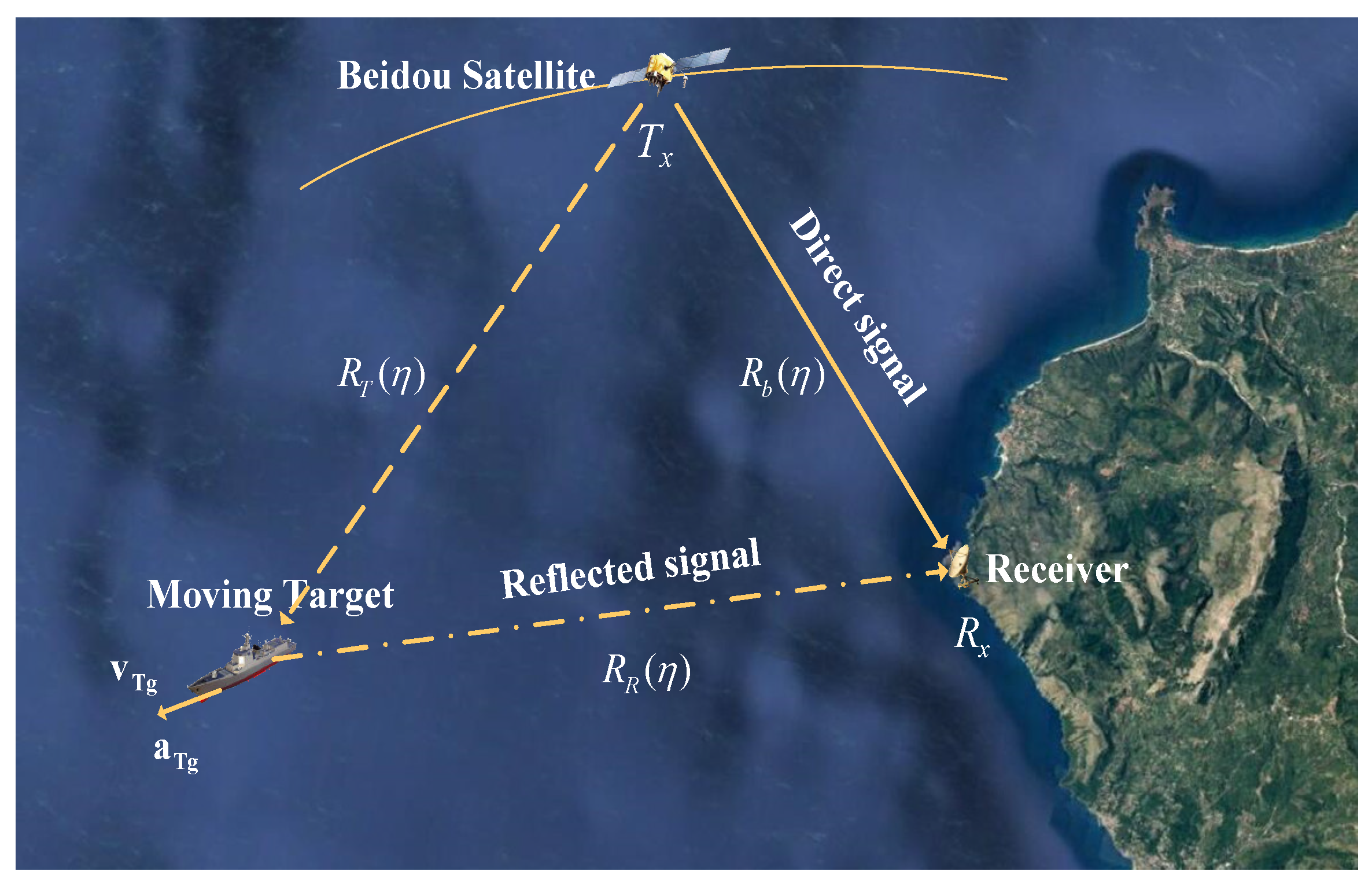
The geometry of the BeiDou-based passive radar is shown in
Figure 1 with reference to the vessel target detection. The system is composed of a BeiDou satellite of opportunity and a fixed receiver.
Tx is the satellite transmitter of opportunity, and
Rx is the fixed receiver on the coast.
Rb is the baseline between
Tx and
Rx.
RT and
RR are the distances from the vessel target to
Tx and
Rx, respectively.
The receiver is equipped with two antennas, i.e., the reference antenna and the surveillance antenna. The former is steered toward the BeiDou satellite to acquire the direct signal, while the latter is utilized to collect the reflected signal from the detection area. Despite the fact that these signals are continuous in time, they can be formatted into two-dimensional fast-time and slow-time domain according to an equivalent pulse repetition interval (PRI) . denotes the fast-time, and denotes the slow-time, where is the entire dwell time. The equivalent PRI is selected as long as the duration of the transmitted ranging code from the BeiDou satellite, where the typical value is 1 ms.
By the cross-correlation of reflect signal and the reference signal (which can be generated from the direct signal [
21]), the range compression as well as the synchronization can be accomplished. The range-compressed data in fast-time and slow-time domain are modeled as [
20]:
where
denotes the imaginary number, and the operator
denotes the rectangular window,
is the cross-correlation function,
is the light speed,
is the wave length,
is the complex reflectivity of the target which changes with slow-time, and
is the bistatic range expressed as:
The corresponding Doppler frequency is obtained as the derivative of the bistatic range with respect to the slow-time variable, i.e.,
Then the bistatic range is precisely expanded into Taylor series as:
where
is the expansion coefficient. In addition, the echo model in (1) can be rewritten as:
The range and Doppler migrations are intuitively exhibited in (2) and (3). Despite the fact that the vessel target is generally not maneuvering, a long dwell time in the order of tens of seconds still leads to the complicated migrations. In order to analyze the compositions of the range and Doppler migrations, a simulation is conducted with the target motion parameters listed in
Table 1, where these values conform with a typical vessel. It is noted that the all the parameters are described inside the east-north-up (ENU) coordinate system, where a fixed receiver is its origin. In response to the case of an extremely low SNR, the dwell time on the target is set to 105 s.
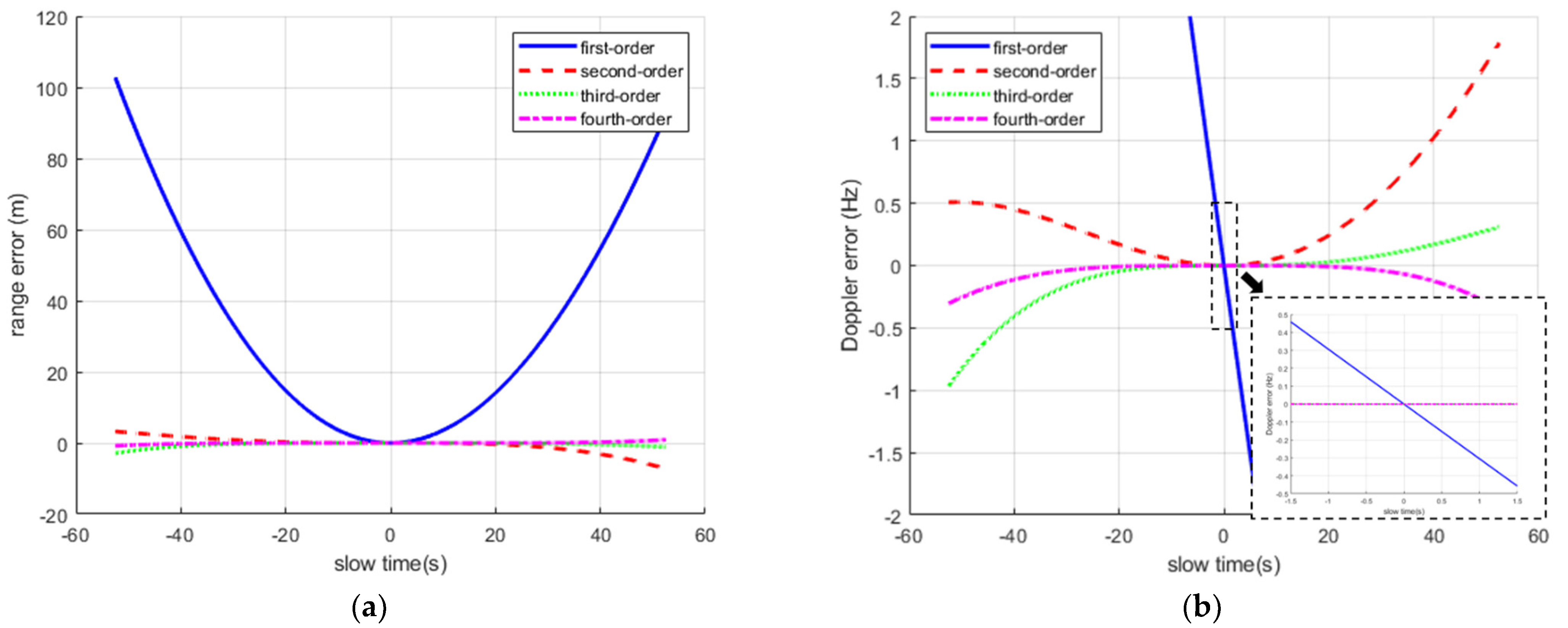
The bistatic range history is expanded into Taylor series with different orders. The fitting errors concerning the bistatic range and the Doppler frequency are presented in
Figure 2. First, considering the BeiDou signal with the largest bandwidth (i.e., B3I), the passive radar provides a range resolution of 15 m [
21]. Thus, it can be observed from
Figure 2a that second-order expansion is sufficient for the bistatic range since the fitting error is smaller than the range resolution even the dwell time is lengthened into 105 s. Then, with respect to the Doppler error presented in
Figure 2b, the Doppler resolution is associated with the coherent processing interval
, and its value is
. The
for a typical vessel target is in the order of 2–3 s [
13], and hereinafter the value is set equal to 3 s as a rigorous premise. It is seen from the curves in the figure that the fourth-order Taylor expansion cannot fulfill the model precision of the Doppler frequency. A high-order expansion is prerequisite under the condition of such a long dwell time, which goes to indicate an intricate Doppler migration. Moreover, the oscillation and rotation motions of the vessel target in practice can make the Doppler migration more complicated [
14]. Finally, the corresponding Doppler error inside the coherent processing interval is shown in the bottom box of
Figure 2b. It can be deduced that only the linear Doppler migration is considerable within the
while the high-order components can be neglected.
3. Long-Time Optimized Integration for Vessel Target Detection
It is known that the scattering mechanism of a target is related to its aspect angle [
24]. Owing to the motion of the vessel target, the variation of aspect angle causes the spatial decorrelation within the entire dwell time in the order of several tens of seconds. Thus, the long-time echo is no longer coherent. In addition, the range and Doppler migrations detailed in
Section 2 increase the difficulty of the long-time integration. In order to obtain an adequate SNR for a reliable BeiDou-base passive radar vessel target detection performance, an optimized long-time integration method via the keystone transform and iterative optimization is proposed in this section.
Transforming the range-compressed signal in (5) into the fast-frequency domain, we have:
where
is the carrier frequency,
is the Fourier transform of
, and
is the fast-frequency. The couplings between
and
in the exponent imply the range migration.
In order to correct the range walk, first, the keystone transform expressed as
is applied to (6), where
is the new slow-time variable. Replace
with
, and the signal becomes:
For the BeiDou-based passive radar, since
, the following approximation is valid:
Substituting (8) into (7), the signal becomes:
It is concluded from
Section 2 that the high-order (higher than second-order) couplings between
and
can be neglected as the introduced range migration is smaller than a range resolution. Then, the inverse Fourier transform is applied to (9). For the sake of intuitiveness,
is replaced with
, which denotes the bistatic range at the reference instant. In addition, we obtain:
It is observed that the undesired range curvature as well as the intricate Doppler migration still retains in (10), which need to be well handled by the subsequent steps.
To cope with the noncoherence of the long-time echo, as the previous works [
20,
21,
22], the hybrid integration strategy is performed. The entire echo is segmented into consecutive frames with the duration of
. The target’s reflectivity can be reasonably regarded as constant within the
. Thus, the coherent integration of each frame is achieved, followed by the noncoherent summation of the multiple frames. After the azimuth segmentation of the data in (10), the
m-th (
,
) frame can be written as:
where
is the constant complex reflectivity inside the
m-th frame.
Define a new slow-time variable as
, and (11) can be rewritten as:
where
denotes the combination number.
Owing to the short frame duration, the range curvature inside each frame can be neglected. Besides, as analyzed in
Section 2, only the linear Doppler migration is considered within such short frame duration. Thus, the
m-th frame is approximated as:
where
denote the expansion coefficients pertaining to the
m-th frame. Then the DC and DFR parameters of the
m-th frame can be expressed as
,
. Apparently, the Doppler parameters vary with the frame index
m.
Then, to implement the coherent integration of the intraframe signal, the dechirp Fourier transform with a specific DFR value
expressed as
is applied to (13), where
is the Doppler frequency. The corresponding coherent integration result of (15) can be derived based on the principle of stationary phase (POSP) [
25]. Converting the fast-time variable into bistatic range variable as
, the result in range and Doppler (RD) domain is given as:
The Doppler migration inside frame is well corrected if the estimated DFR value exactly equals the actual value, i.e., . With respect to this opportune DFR value, it is observed from (16) that the intraframe signal can be coherently integrated at the specific position in the m-th RD plane.
Next, a noncoherent integration of multiple frames is performed to increase the integration time. Due to the fluctuant DC values and the residual range curvature, the coherent integrated peaks of multiple frames are located at different positions, which indicates that a compensation operation is indispensable. We take the central frame as the reference, and after range and Doppler shifts compensation, the multi-frame summation can be expressed as:
The target echo is well concentrated after the above processes. However, since the vessel target is usually noncooperative, the multiple DC and DFR values are inaccessible. Thereby the coherent integration in (16) and the noncoherent integration in (17) cannot be simply implemented. Here, we achieve the long-time integration by transforming it into an optimization problem. To correct the Doppler migration of
M frames, the DFR values of consecutive
M frames are required. In addition, the DFR value of the central frame can be used to correct the residual range curvature in parallel. To compensate for the Doppler shifts,
M − 1 decision variables representing the Doppler shift values are required. Therefore, we define the decision vector with 2
M − 1 variables as:
where the
and
are the estimated DFR value and Doppler shift of the
m-th frame. In addition, the corresponding integration result is:
Taking the SNR as the objective function, the maximization optimization problem is expressed as:
where
and
are the signal power and noise power of the integration result presented in (19). In practice, the signal power is estimated as the peak power contributed by the vessel target of the integrated result, and the noise power is evaluated by the mean power of the region containing the noise contribution only.
To solve this optimization problem, an evolutionary algorithm named particle swarm optimization (PSO) [
26] is employed. It is a population-based stochastic optimization algorithm, which is inspired by the behavior of bird flocking. The PSO population with particles intends to search for the optimized solution by updating their positions. After the random population initialization, each particle will fly toward the direction guided by its personal best (pBest) and the global best (gBest). As a result, all the particles will converge to a specific point, whose position represents the optimized solution. The procedure of the PSO-based long-time integration is given in Algorithm 1. In theory, the components of optimized solution are the actual Doppler shift and DFR values. Thus, the echo energy can be completely gathered, which is able to provide an integration result in RD domain with maximum SNR.
| Algorithm 1 Long-time optimized integration method |
| Input: | M signal frames after keystone transform |
| Output: | Actual Doppler shift and DFR values of the M frames |
| 1. | Model the optimization problem as given in (20). |
| 2. | Initialize the population size I, generation number G, search space . |
| 3. | Randomly initialize of the i-th particle in . |
| 4. | Evaluate the initial objective value of the function . |
| 5. | Initialize the personal archive and global archive. |
| 6. | For g = 1 to G |
| 7. | Select gBest from global archive. |
| 8. | Adjust iteration parameters. |
| 9. | For i = 1 to I |
| 10. | Select pBest from personal archive. |
| 11. | Update velocity and position of the i-th particle. |
| 12. | Evaluate the objective value . |
| 13. | Update personal archive. |
| 14. | Update global archive. |
| 15. | End For |
| 16. | End For |
| 17. | Return particle position. |
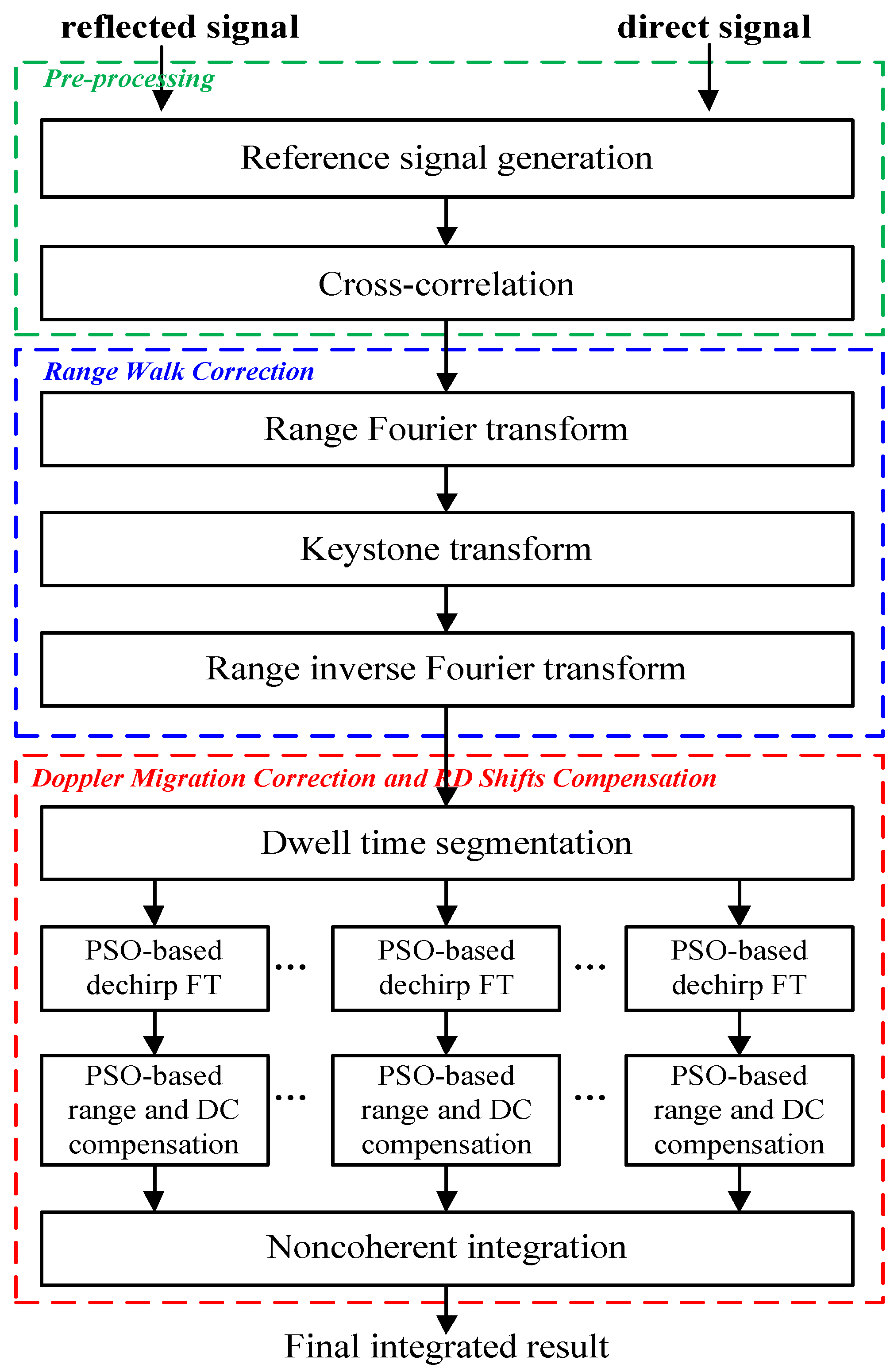
In summary, the mentioned problems are well solved after the procedures, providing an effective target echo integration result for the BeiDou-based passive radar vessel target detection. The flowchart of the proposed integration method is shown in
Figure 3.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}