
Design of a Generic Virtual Measurement Workflow for Processing Archived Point Cloud of Trees and Its Implementation of Light Condition Measurements on Stems


Abstract
:1. Introduction
1.1. Difficulties in the Reuse of Point Clouds
1.2. Development of the Virtual Measurement Workflow (VMW)
1.3. Conventional Methods of Assessing Light Condition in Sample Plots
1.4. Assessing Light Condition Using VMW
2. Materials and Methods
2.1. Development of Virtual Measurement Workflow (VMW)
2.1.1. Missions and Features of VMW
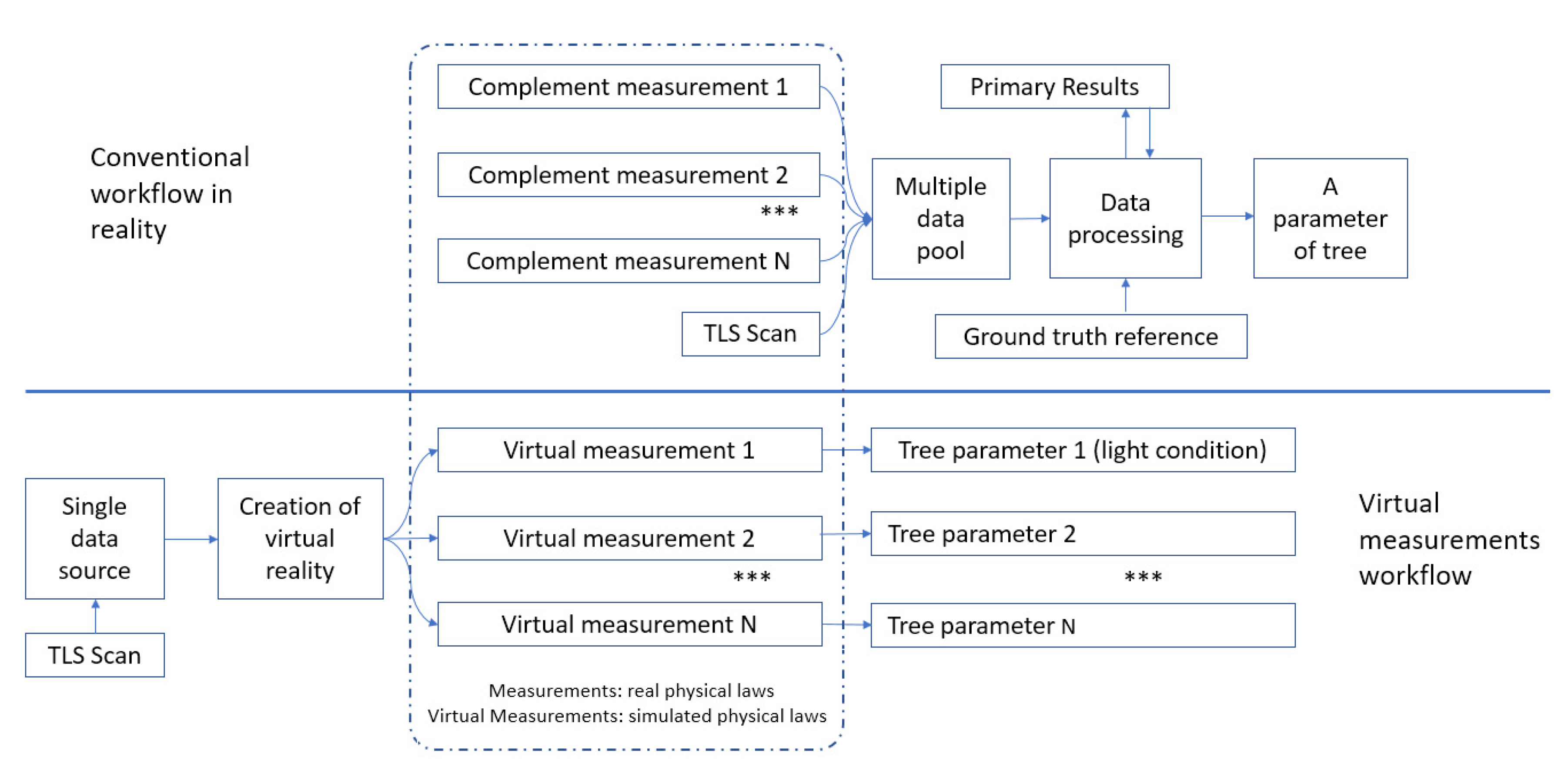
2.1.2. Mechanism of VMW
2.1.3. Virtual Trees, the Equivalents of Real Trees
2.1.4. Computational Virtual Measurement, the Equivalents of Measurement in Reality
2.2. An Example of How to Implement VMW: Virtual Measurement of Light Conditions
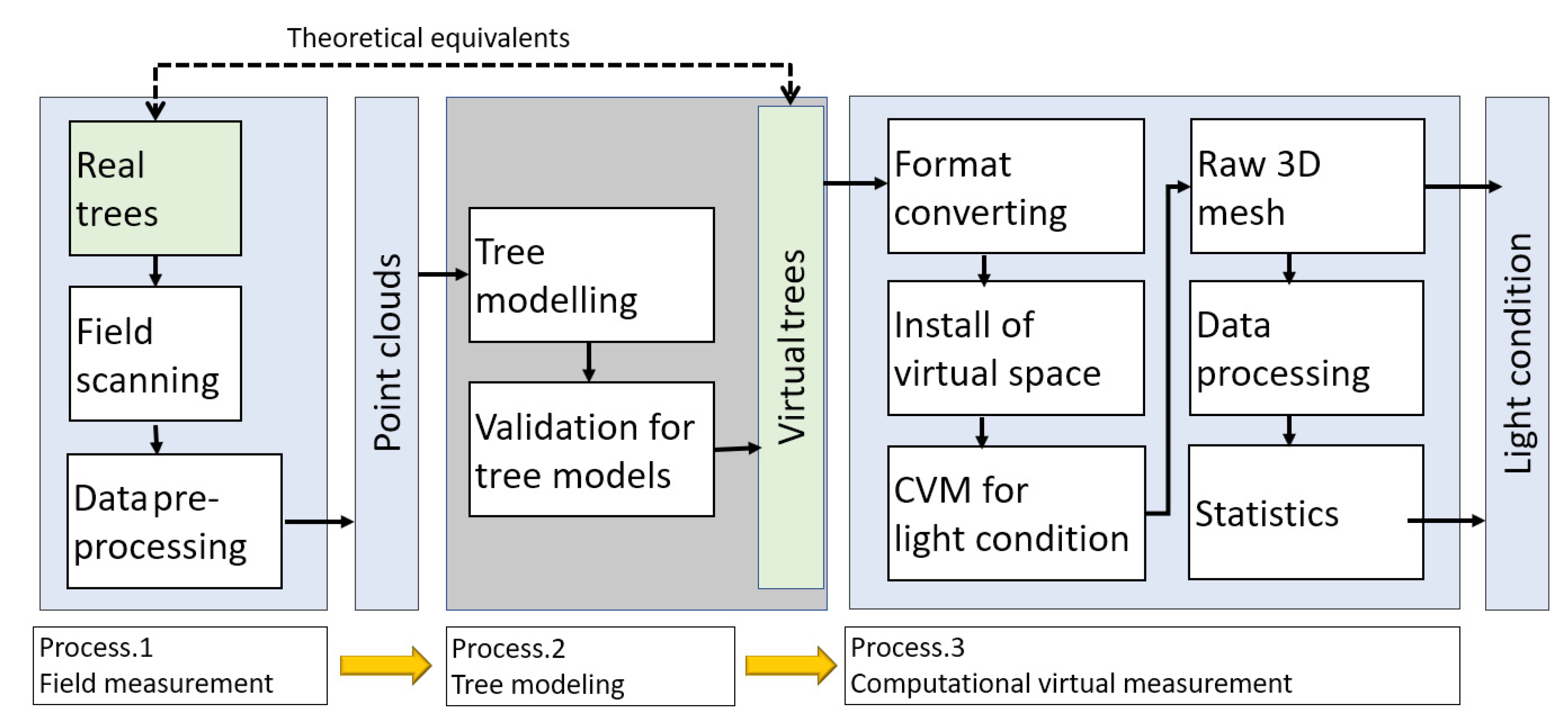
2.2.1. Full Workflow
2.2.2. An Archived Point Clouds from TLS Field Campaign
2.2.3. Data Pre-Processing
2.2.4. Tree Modeling and Validation
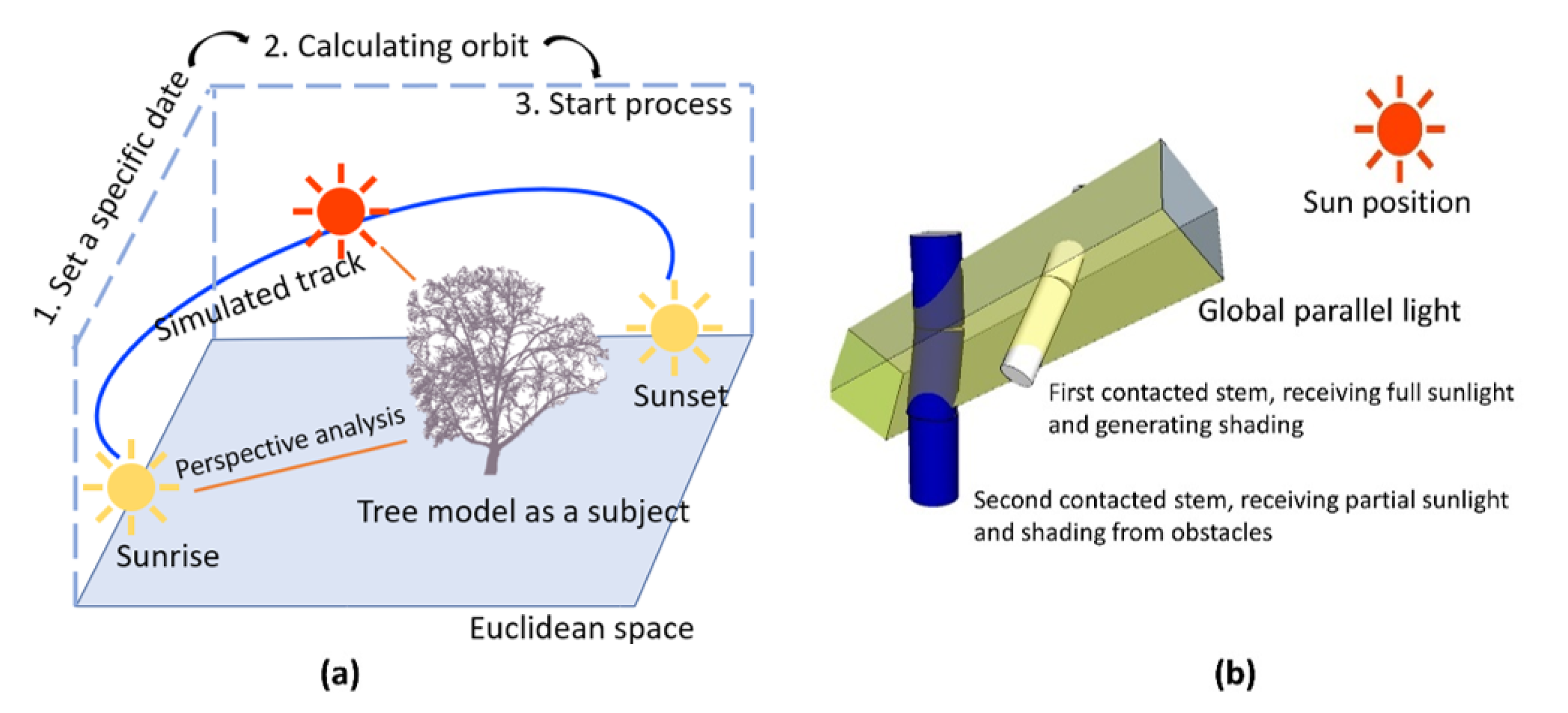
2.2.5. CVM for Single Tree Light Conditions
2.2.6. Technical Issues of Using Architectural Software
2.2.7. Data Format of the Output
2.2.8. Statistics
2.2.9. Additional Data Source
3. Results
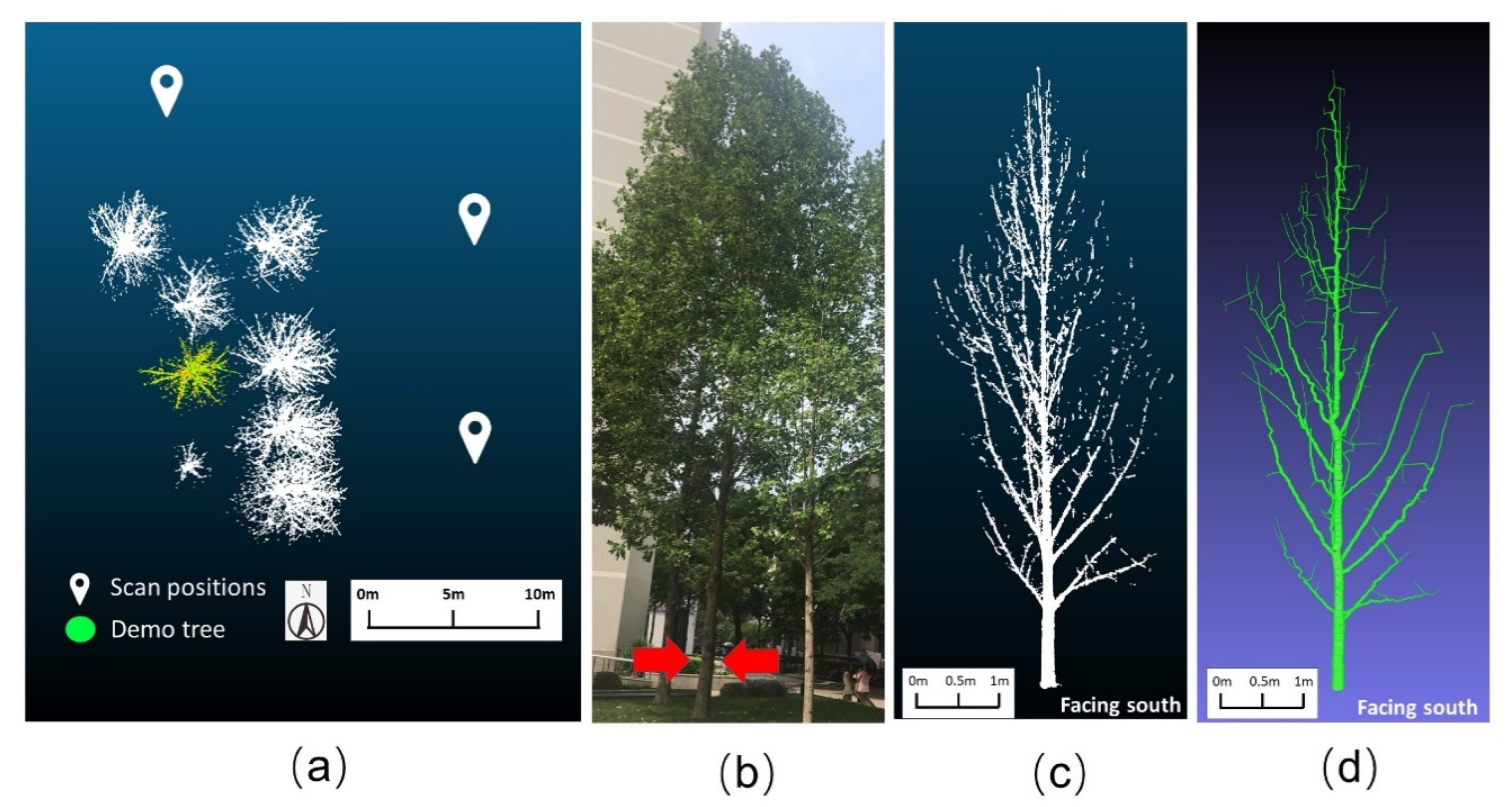
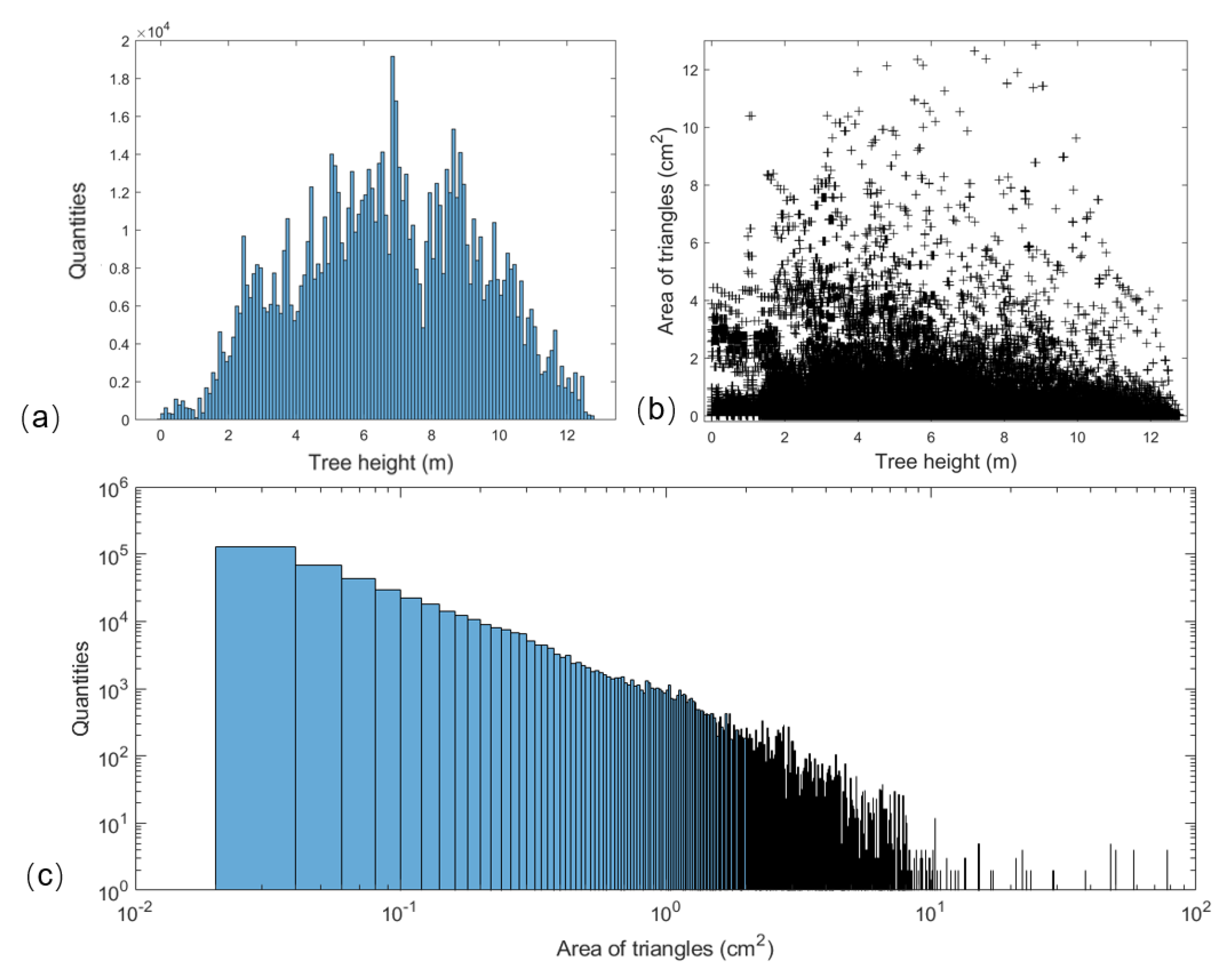
3.1. TLS Scanning and Single Tree Modeling
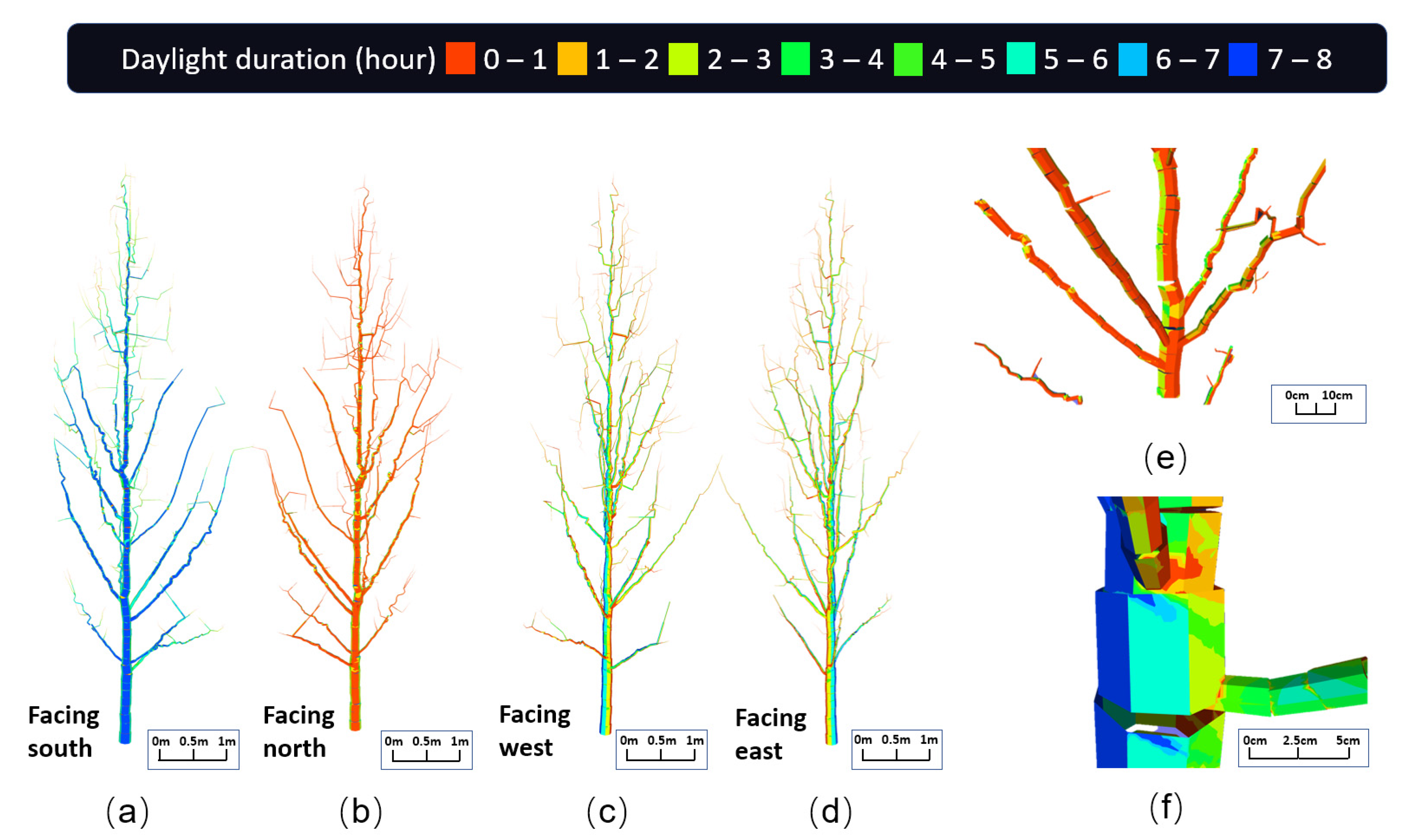
3.2. CVM for Single Tree Light Condtions
4. Discussion
4.1. Discussion for VMW
4.1.1. Choices of Modeling Levels of Virtual Trees
4.1.2. A Theoretical Preparation for Lidar-Based NFI in the Future
4.2. Discussion for VMW Implementation of Light Condiction Measurement
4.2.1. Investigation of the Connection between Light Conditions and Tree Morphology
4.2.2. Potential Contributions to Tree Physiology Research
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liang, X.; Hyyppä, J.; Kaartinen, H.; Lehtomäki, M.; Pyörälä, J.; Pfeifer, N.; Holopainen, M.; Brolly, G.; Francesco, P.; Hackenberg, J.; et al. International benchmarking of terrestrial laser scanning approaches for forest inventories. ISPRS J. Photogramm. Remote Sens. 2018, 144, 137–179. [Google Scholar] [CrossRef]
- Liang, X.L.; Kankare, V.; Hyyppa, J.; Wang, Y.S.; Kukko, A.; Haggren, H.; Yu, X.W.; Kaartinen, H.; Jaakkola, A.; Guan, F.Y.; et al. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Kulman, H. Effects of insect defoliation on growth and mortality of trees. Annu. Rev. Entomol. 1971, 16, 289–324. [Google Scholar] [CrossRef]
- Li, Y.; Härdtle, W.; Bruelheide, H.; Nadrowski, K.; Scholten, T.; von Wehrden, H.; von Oheimb, G. Site and neighborhood effects on growth of tree saplings in subtropical plantations (China). For. Ecol. Manag. 2014, 327, 118–127. [Google Scholar] [CrossRef]
- Latifi, H.; Fassnacht, F.E.; Müller, J.; Tharani, A.; Dech, S.; Heurich, M. Forest inventories by lidar data: A comparison of single tree segmentation and metric-based methods for inventories of a heterogeneous temperate forest. Int. J. Appl. Earth Obs. 2015, 42, 162–174. [Google Scholar] [CrossRef]
- Magnussen, S.; Naesset, E.; Gobakken, T. Lidar-supported estimation of change in forest biomass with time-invariant regression models. Can. J. For. Res. 2015, 45, 1514–1523. [Google Scholar] [CrossRef]
- Stovall, A.E.L.; Vorster, A.G.; Anderson, R.S.; Evangelista, P.H.; Shugart, H.H. Non-destructive aboveground biomass estimation of coniferous trees using terrestrial lidar. Remote Sens. Environ. 2017, 200, 31–42. [Google Scholar] [CrossRef]
- Oberbauer, S.F.; Strain, B.R. Photosynthesis and successional status of costa rican rain forest trees. Photosynth. Res. 1984, 5, 227–232. [Google Scholar] [CrossRef]
- Green, S.R. Radiation balance, transpiration and photosynthesis of an isolated tree. Agric. For. Meteorol. 1993, 64, 201–221. [Google Scholar] [CrossRef]
- Iwasa, Y.; Cohen, D.; Leon, J.A. Tree height and crown shape, as results of competitive games. J. Theor. Biol. 1985, 112, 279–297. [Google Scholar] [CrossRef]
- Kozlowski, T.T. Light and water in relation to growth and competition of piedmont forest tree species. Ecol. Monogr. 1949, 19, 207–231. [Google Scholar] [CrossRef]
- Gravel, D.; Canham, C.D.; Beaudet, M.; Messier, C. Shade tolerance, canopy gaps and mechanisms of coexistence of forest trees. Oikos 2010, 119, 475–484. [Google Scholar] [CrossRef] [Green Version]
- Gendron, F.; Messier, C.; Comeau, P.G. Comparison of various methods for estimating the mean growing season percent photosynthetic photon flux density in forests. Agric. For. Meteorol. 1998, 92, 55–70. [Google Scholar] [CrossRef] [Green Version]
- Kato, S.; Komiyama, A. Spatial and seasonal heterogeneity in understory light conditions caused by differential leaf flushing of deciduous overstory trees. Ecol. Res. 2002, 17, 687–693. [Google Scholar] [CrossRef]
- Parent, S.; Messier, C. A simple and efficient method to estimate microsite light availability under a forest canopy. Can. J. For. Res. 1996, 26, 151–154. [Google Scholar] [CrossRef]
- Bunce, J.A. Effects of weather during leaf development on photosynthetic characteristics of soybean leaves. Photosynth. Res. 1985, 6, 215–220. [Google Scholar] [CrossRef]
- Pretzsch, H. Canopy space filling and tree crown morphology in mixed-species stands compared with monocultures. For. Ecol. Manag. 2014, 327, 251–264. [Google Scholar] [CrossRef] [Green Version]
- Deleuze, C.; Hervé, J.-C.; Colin, F.; Ribeyrolles, L. Modelling crown shape of piceaabies: Spacing effects. Can. J. For. Res. 1996, 26, 1957–1966. [Google Scholar] [CrossRef]
- Pretzsch, H. Re-evaluation of allometry: State-of-the-art and perspective regarding individuals and stands of woody plants. In Progress in Botany 71; Springer: Berlin/Heidelberg, Germany, 2010; pp. 339–369. [Google Scholar]
- Peper, P.J.; McPherson, E.G.; Mori, S.M. Equations for predicting diameter, height, crown width, and leaf area of san joaquin valley street trees. J. Arboric. 2001, 27, 306–317. [Google Scholar]
- Bechtold, W.A. Largest-crown-width prediction models for 53 species in the western united states. West. J. Appl. For. 2004, 19, 245–251. [Google Scholar] [CrossRef]
- Ferraz, A.; Saatchi, S.; Mallet, C.; Meyer, V. Lidar detection of individual tree size in tropical forests. Remote Sens. Environ. 2016, 183, 318–333. [Google Scholar] [CrossRef]
- Whitmore, T. Canopy gaps and the two major groups of forest trees. Ecology 1989, 70, 536–538. [Google Scholar] [CrossRef]
- Bagaram, M.; Giuliarelli, D.; Chirici, G.; Giannetti, F.; Barbati, A. Uav remote sensing for biodiversity monitoring: Are forest canopy gaps good covariates? Remote Sens. 2018, 10, 1397. [Google Scholar]
- Yun, T.; Jiang, K.; Li, G.; Eichhorn, M.P.; Fan, J.; Liu, F.; Chen, B.; An, F.; Cao, L. Individual tree crown segmentation from airborne lidar data using a novel gaussian filter and energy function minimization-based approach. Remote Sens. Environ. 2021, 256, 112307. [Google Scholar] [CrossRef]
- Yun, T.; Cao, L.; An, F.; Chen, B.; Xue, L.; Li, W.; Pincebourde, S.; Smith, M.J.; Eichhorn, M.P. Simulation of multi-platform lidar for assessing total leaf area in tree crowns. Agric. For. Meteorol. 2019, 276, 107610. [Google Scholar] [CrossRef]
- Bréda, N.J. Ground-based measurements of leaf area index: A review of methods, instruments and current controversies. J. Exp. Bot. 2003, 54, 2403–2417. [Google Scholar] [CrossRef]
- Weiss, M.; Baret, F.; Smith, G.; Jonckheere, I.; Coppin, P. Review of methods for in situ leaf area index (lai) determination: Part ii. Estimation of lai, errors and sampling. Agric. For. Meteorol. 2004, 121, 37–53. [Google Scholar] [CrossRef]
- Kitao, M.; Hida, T.; Eguchi, N.; Tobita, H.; Utsugi, H.; Uemura, A.; Kitaoka, S.; Koike, T. Light compensation points in shade-grown seedlings of deciduous broadleaf tree species with different successional traits raised under elevated co2. Plant Biol. 2016, 18, 22–27. [Google Scholar] [CrossRef] [Green Version]
- Song, Q.; Xiao, H.; Xiao, X.; Zhu, X.-G. A new canopy photosynthesis and transpiration measurement system (capts) for canopy gas exchange research. Agric. For. Meteorol. 2016, 217, 101–107. [Google Scholar] [CrossRef]
- Hu, Y.; Zhao, P.; Niu, J.; Sun, Z.; Zhu, L.; Ni, G. Canopy stomatal uptake of nox, so2 and o3 by mature urban plantations based on sap flow measurement. Atmos. Environ. 2016, 125, 165–177. [Google Scholar] [CrossRef]
- Jaakkola, A.; Hyyppä, J.; Yu, X.; Kukko, A.; Kaartinen, H.; Liang, X.; Hyyppä, H.; Wang, Y. Autonomous collection of forest field reference—The outlook and a first step with uav laser scanning. Remote Sens. 2017, 9, 785. [Google Scholar] [CrossRef] [Green Version]
- Schrader, J.; Pillar, G.; Kreft, H. Leaf-it: An android application for measuring leaf area. Ecol. Evol. 2017, 7, 9731–9738. [Google Scholar] [CrossRef]
- Asner, G.P.; Martin, R.E.; Anderson, C.B.; Knapp, D.E. Quantifying forest canopy traits: Imaging spectroscopy versus field survey. Remote Sens. Environ. 2015, 158, 15–27. [Google Scholar] [CrossRef]
- Hosoi, F.; Nakai, Y.; Omasa, K. 3-d voxel-based solid modeling of a broad-leaved tree for accurate volume estimation using portable scanning lidar. ISPRS J. Photogramm. Remote Sens. 2013, 82, 41–48. [Google Scholar] [CrossRef]
- Raumonen, P.; Kaasalainen, M.; Åkerblom, M.; Kaasalainen, S.; Kaartinen, H.; Vastaranta, M.; Holopainen, M.; Disney, M.; Lewis, P. Fast automatic precision tree models from terrestrial laser scanner data. Remote Sens. 2013, 5, 491–520. [Google Scholar] [CrossRef] [Green Version]
- Tonge, R. Collision Detection in Physx. Available online: https://sgvr.kaist.ac.kr/~sungeui/Collision_tutorial/Richard.pdf (accessed on 18 June 2021).
- Corporation, N. Rigid Body Dynamics. Available online: https://docs.nvidia.com/gameworks/content/gameworkslibrary/physx/guide/Manual/RigidBodyDynamics.html#applying-forces-and-torques (accessed on 18 June 2021).
- Chopra, A.; Town, L.; Pichereau, C. Introduction to Google Sketchup; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Hackenberg, J.; Morhart, C.; Sheppard, J.; Spiecker, H.; Disney, M. Highly accurate tree models derived from terrestrial laser scan data: A method description. Forests 2014, 5, 1069. [Google Scholar] [CrossRef] [Green Version]
- Xu, L.; Mould, D. Procedural tree modeling with guiding vectors. Comput. Graph. Forum 2015, 34, 47–56. [Google Scholar] [CrossRef]
- CloudCompare. Available online: http://www.danielgm.net/cc/ (accessed on 18 June 2021).
- Rusu, R.B.; Marton, Z.C.; Blodow, N.; Dolha, M.; Beetz, M. Towards 3d point cloud based object maps for household environments. Robot. Auton. Syst. 2008, 56, 927–941. [Google Scholar] [CrossRef]
- Disney, M.; Raumonen, P.; Lewis, P. Testing a new vegetation structure retrieval algorithm from terrestrial lidar scanner data using 3d models. In Proceedings of the Silvilaser 2012, 12th International Conference on LiDAR Applications for Assessing Forest Ecosystems, Vancouver, BC, Canada, 16–19 September 2012. [Google Scholar]
- Hackenberg, J.; Spiecker, H.; Calders, K.; Disney, M.; Raumonen, P. Simpletree-an efficient open source tool to build tree models from tls clouds. Forests 2015, 6, 4245–4294. [Google Scholar] [CrossRef]
- Åkerblom, M. Quantitative Tree Modeling from Laser Scanning Data. Master’s Thesis, Tampere University of Technology, Tampere, Finland, 2012. [Google Scholar]
- Wang, S.; Hong, B. Optimum design of tilt angle and horizontal direction of solar collectors under obstacle’s shadow for building applications. J. Build. Constr. Plan. Res. 2015, 3, 60. [Google Scholar] [CrossRef] [Green Version]
- Wong, L. A review of daylighting design and implementation in buildings. Renew. Sustain. Energy Rev. 2017, 74, 959–968. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Chen, T. Efficient feature extraction for 2d/3d objects in mesh representation. In Proceedings of the 2001 International Conference on Image Processing (Cat. No. 01CH37205), Thessaloniki, Greece, 7–10 October 2001; IEEE: Piscataway, NJ, USA, 2001; pp. 935–938. [Google Scholar]
- Blain, J.M. The Complete Guide to Blender Graphics: Computer Modeling & Animation; AK Peters/CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Akerblom, M.; Raumonen, P.; Kaasalainen, M.; Casella, E. Analysis of geometric primitives in quantitative structure models of tree stems. Remote Sens. 2015, 7, 4581–4603. [Google Scholar]
- Sharma, A.; Sharma, B.; Hayes, S.; Kerner, K.; Hoecker, U.; Jenkins, G.I.; Franklin, K.A. Uvr8 disrupts stabilisation of pif5 by cop1 to inhibit plant stem elongation in sunlight. Nat. Commun. 2019, 10, 4417. [Google Scholar] [CrossRef] [Green Version]
- Morgan, D.; Smith, H. Non-photosynthetic responses to light quality. In Physiological Plant Ecology i; Springer: Berlin/Heidelberg, Germany, 1981; pp. 109–134. [Google Scholar]
- Funk, J.L.; Glenwinkel, L.A.; Sack, L. Differential allocation to photosynthetic and non-photosynthetic nitrogen fractions among native and invasive species. PLoS ONE 2013, 8, e64502. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Erez, A. The effect of different portions of the sunlight spectrum on ethylene evolution in peach (prunus persica) apices. Physiol. Plant. 1977, 39, 285–289. [Google Scholar] [CrossRef]
- Fathi, L. Structural and Mechanical Properties of the Wood from Coconut Palms, Oil Palms and Date Palms. Ph.D. Thesis, Staats-und Universitätsbibliothek Hamburg Carl von Ossietzky, Hamburg, Germany, 2014. [Google Scholar]
- Perera, L.; Russell, J.; Provan, J.; Powell, W. Levels and distribution of genetic diversity of coconut (cocos nucifera l., var. Typica form typica) from sri lanka assessed by microsatellite markers. Euphytica 2001, 122, 381–389. [Google Scholar] [CrossRef]
- Brutovska, E.; Samelova, A.; Dušička, J.; Mičieta, K. Ageing of trees: Application of general ageing theories. Ageing Res. Rev. 2013, 12, 855–866. [Google Scholar] [CrossRef]
- Pfanz, H.; Aschan, G.; Langenfeld-Heyser, R.; Wittmann, C.; Loose, M. Ecology and ecophysiology of tree stems: Corticular and wood photosynthesis. Naturwissenschaften 2002, 89, 147–162. [Google Scholar] [PubMed]
- Craighead, F. Direct sunlight as a factor in forest insect control. Proc. Entomol. Soc. 1920, 22, 81–83. [Google Scholar]
- Eichhorn, M.P.; Compton, S.G.; Hartley, S.E. The influence of soil type on rain forest insect herbivore communities. Biotropica 2008, 40, 707–713. [Google Scholar] [CrossRef]
- Ulyshen, M.D.; Horn, S.; Barnes, B.; Gandhi, K.J. Impacts of prescribed fire on saproxylic beetles in loblolly pine logs. Insect Conserv. Divers. 2010, 3, 247–251. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Direct or Indirect | Systematic or Allometric | Measuring Targets | Measuring Duration |
|---|---|---|---|---|
| Radiation detecting | direct | yes/no | irradiation | continuous/instant |
| Crown morphology | direct | yes/no | tree | instant |
| LAI calculating | direct | yes | tree | instant |
| Metabolites detecting | indirect | yes/no | gas | continuous |
| Parameter | Value |
|---|---|
| Wavelength | 785 nm |
| Beam divergence | Typical 0.16 mrad (0.009°) |
| Beam diameter at exit | 3.3 mm, circular |
| Range | 0.6 m–120 m |
| Measurement speed (Pts/Sec) | 122,000/244,000/488,000/976,000 |
| Ranging error | ±2 mm at 10 m and 25 m, each at 90% and 10% reflectivity |
| Field of view (vertical/horizontal) | 320°/360° |
| Step size (vertical/horizontal) | 0.009° (40,000 3D-Pixel on 360°)/0.009° (40,000 3D-Pixel on 360°) |
| Duration of Daylight (hour) | 0–1 | 1–2 | 2–3 | 3–4 | 4–5 | 5–6 | 6–7 | 7–8 | 8 | Total | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Area (m2) | 5.16 | 1.50 | 1.60 | 0.91 | 1.25 | 1.21 | 0.67 | 1.45 | 0.62 | 14.38 | |
| α | Relative area of faces (triangles) | 35.87% | 10.46% | 11.12% | 6.34% | 8.72% | 8.41% | 4.65% | 10.09% | 4.34% | 100% |
| β | Relative quantities of faces (triangles) | 22.46% | 19.32% | 17.47% | 12.60% | 11.01% | 7.18% | 5.41% | 3.92% | 0.63% | 100% |
| γ | The ratio of α/β | 1.60 | 0.54 | 0.64 | 0.50 | 0.79 | 1.17 | 0.86 | 2.57 | 6.89 | n/a |
| Duration of Daylight (hour) | 0–1 | 1–2 | 2–3 | 3–4 | 4–5 | 5–6 | 6–7 | 7–8 | 8 |
|---|---|---|---|---|---|---|---|---|---|
| Sessile oak | 45.60% | 12.91% | 14.44% | 5.01% | 8.58% | 4.03% | 1.28% | 7.91% | 0.23% |
| Gemu tree | 29.79% | 11.09% | 11.78% | 5.00% | 11.38% | 9.39% | 4.24% | 6.94% | 10.38% |
| Masson’s pine | 40.58% | 11.41% | 12.78% | 7.31% | 7.46% | 8.89% | 3.49% | 2.37% | 5.71% |
| Cherry tree | 65.89% | 13.48% | 7.30% | 3.12% | 3.22% | 1.72% | 1.85% | 3.40% | 0.02% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Zhang, X.; Zheng, J.; Zhao, Y.; Wang, J.; Schmullius, C. Design of a Generic Virtual Measurement Workflow for Processing Archived Point Cloud of Trees and Its Implementation of Light Condition Measurements on Stems. Remote Sens. 2021, 13, 2801. https://doi.org/10.3390/rs13142801
Wang Z, Zhang X, Zheng J, Zhao Y, Wang J, Schmullius C. Design of a Generic Virtual Measurement Workflow for Processing Archived Point Cloud of Trees and Its Implementation of Light Condition Measurements on Stems. Remote Sensing. 2021; 13(14):2801. https://doi.org/10.3390/rs13142801
Chicago/Turabian StyleWang, Zhichao, Xiaoyuan Zhang, Jun Zheng, Yao Zhao, Jia Wang, and Christiane Schmullius. 2021. "Design of a Generic Virtual Measurement Workflow for Processing Archived Point Cloud of Trees and Its Implementation of Light Condition Measurements on Stems" Remote Sensing 13, no. 14: 2801. https://doi.org/10.3390/rs13142801
APA StyleWang, Z., Zhang, X., Zheng, J., Zhao, Y., Wang, J., & Schmullius, C. (2021). Design of a Generic Virtual Measurement Workflow for Processing Archived Point Cloud of Trees and Its Implementation of Light Condition Measurements on Stems. Remote Sensing, 13(14), 2801. https://doi.org/10.3390/rs13142801