
Recognition of the Typical Distress in Concrete Pavement Based on GPR and 1D-CNN



Abstract

1. Introduction
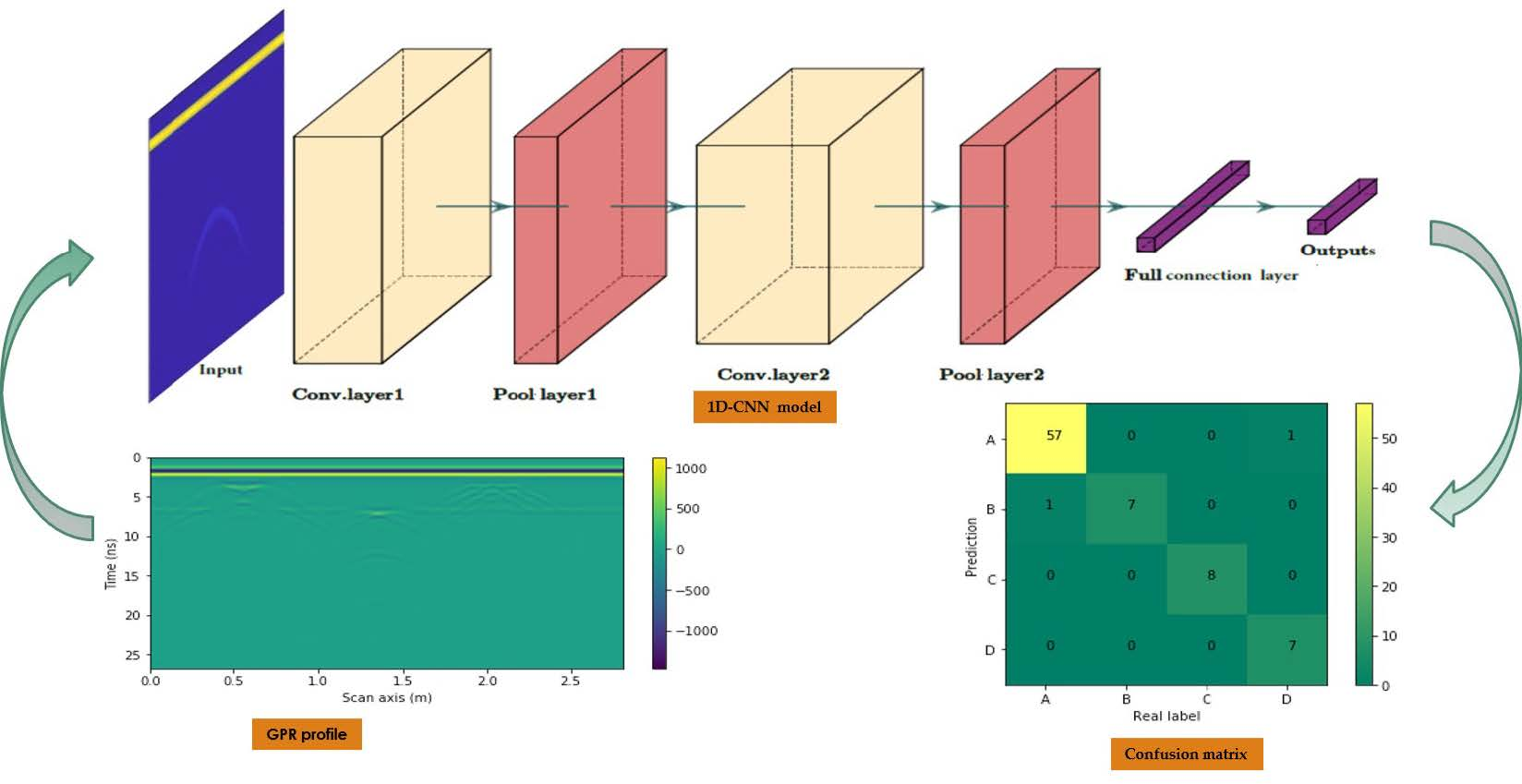
- Unlike the conventional machine learning method based on GPR signal cognition available in the literature, the proposed method directly operates on the raw GPR signal without the need for manual feature extraction. The high-level features of the GPR signal are automatically extracted through the convolutional operation layer of 1D-CNN.
- Conventional machine learning methods applied to GPR signals use manual features that are limited by the specific data set. The proposed CNN-based method uses the optimal features learned by the 1D-CNNs to maximize classification accuracy. It is the critical property that significantly improves classification performance.
- Furthermore, we showed the cognition classification results have high accuracy in one simulation experiment in benchmark pavement GPR detection and one practical pavement detection experiment.
2. Theory and Methodology
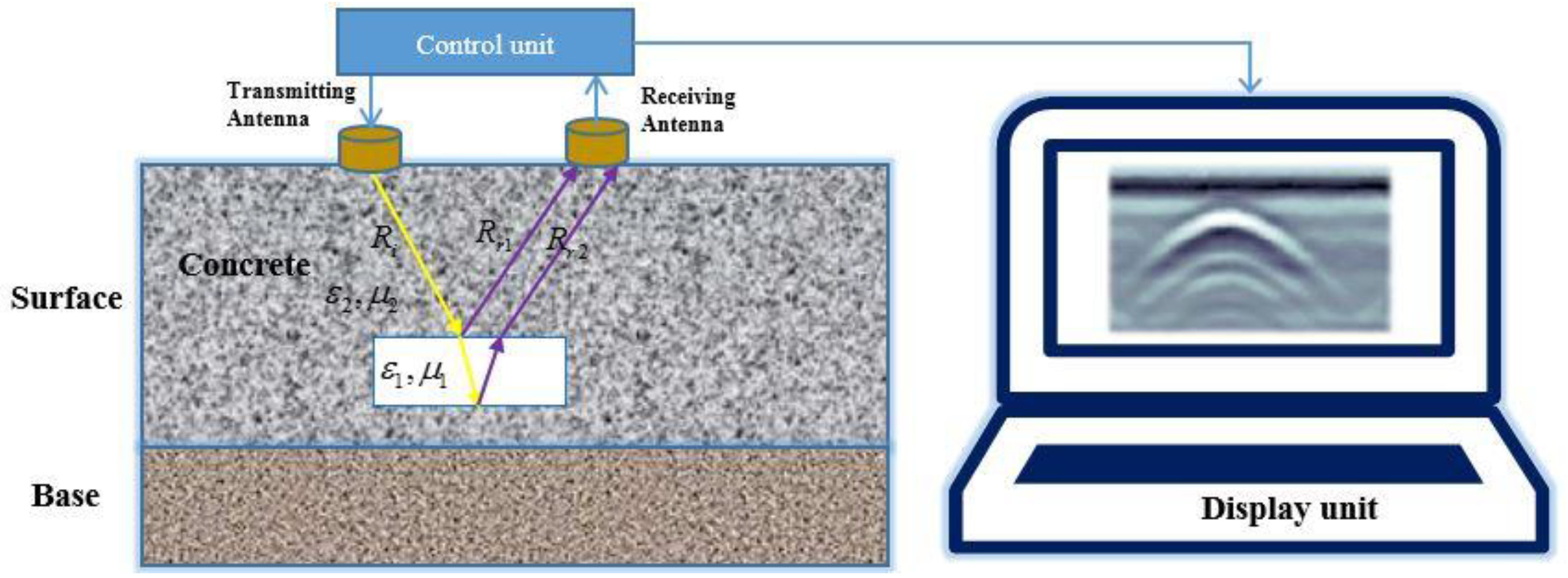
2.1. GPR Detection Concrete Distress Theory
- Data processing includes preprocessing (marking and station correction, etc.) and post-processing. Its primary purpose is to suppress interference and highlight sound signals under the condition of ensuring resolution to make the degree of reflection wave as clear as possible. It can extract various valuable parameters (such as electromagnetic wave velocity, waveform, etc.).
- The purpose of image interpretation is to analyze the processed time profile and interpret the anomalies. In the process of interpretation, the reflection signals are interpreted qualitatively and quantitatively according to the appearance features of the image, such as reflection intensity and phase features, and combining with drilling data and other supporting data.
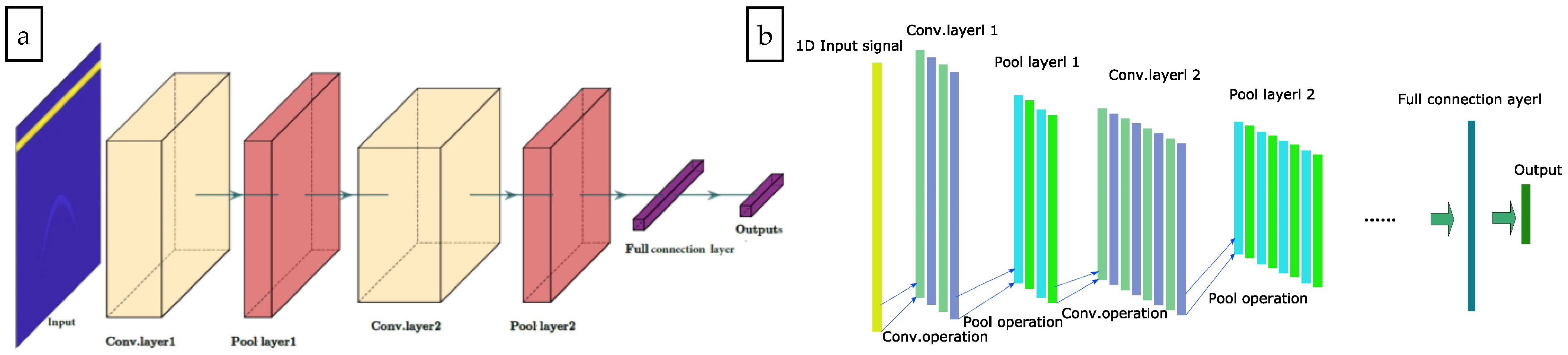
2.2. One-Dimensional Convolution Neural Network
3. GPR Numerical Simulation Model Experiment
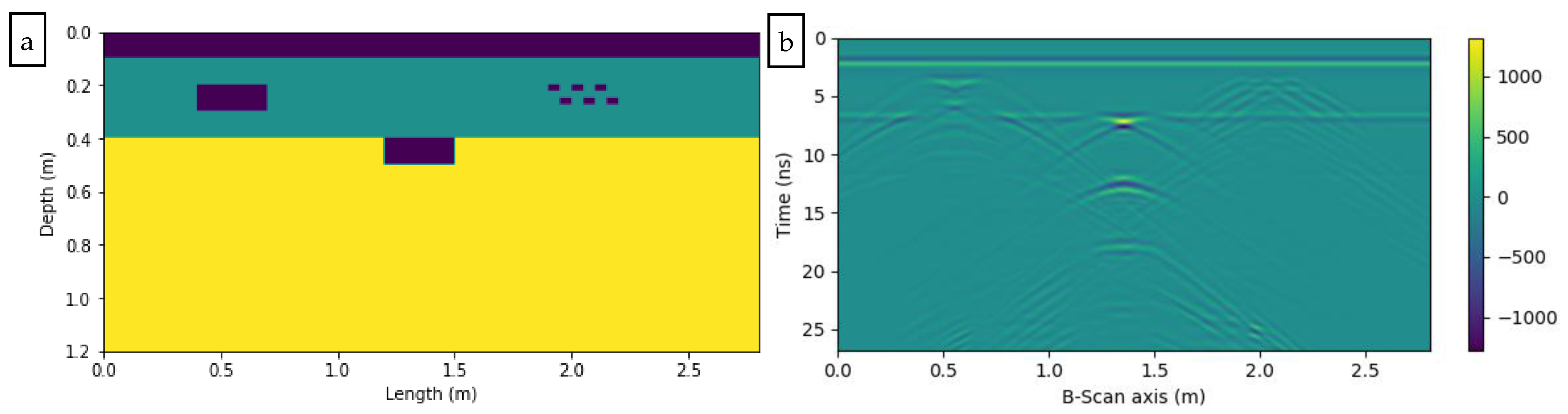
3.1. Pavement GPR Detection Benchmark Simulation
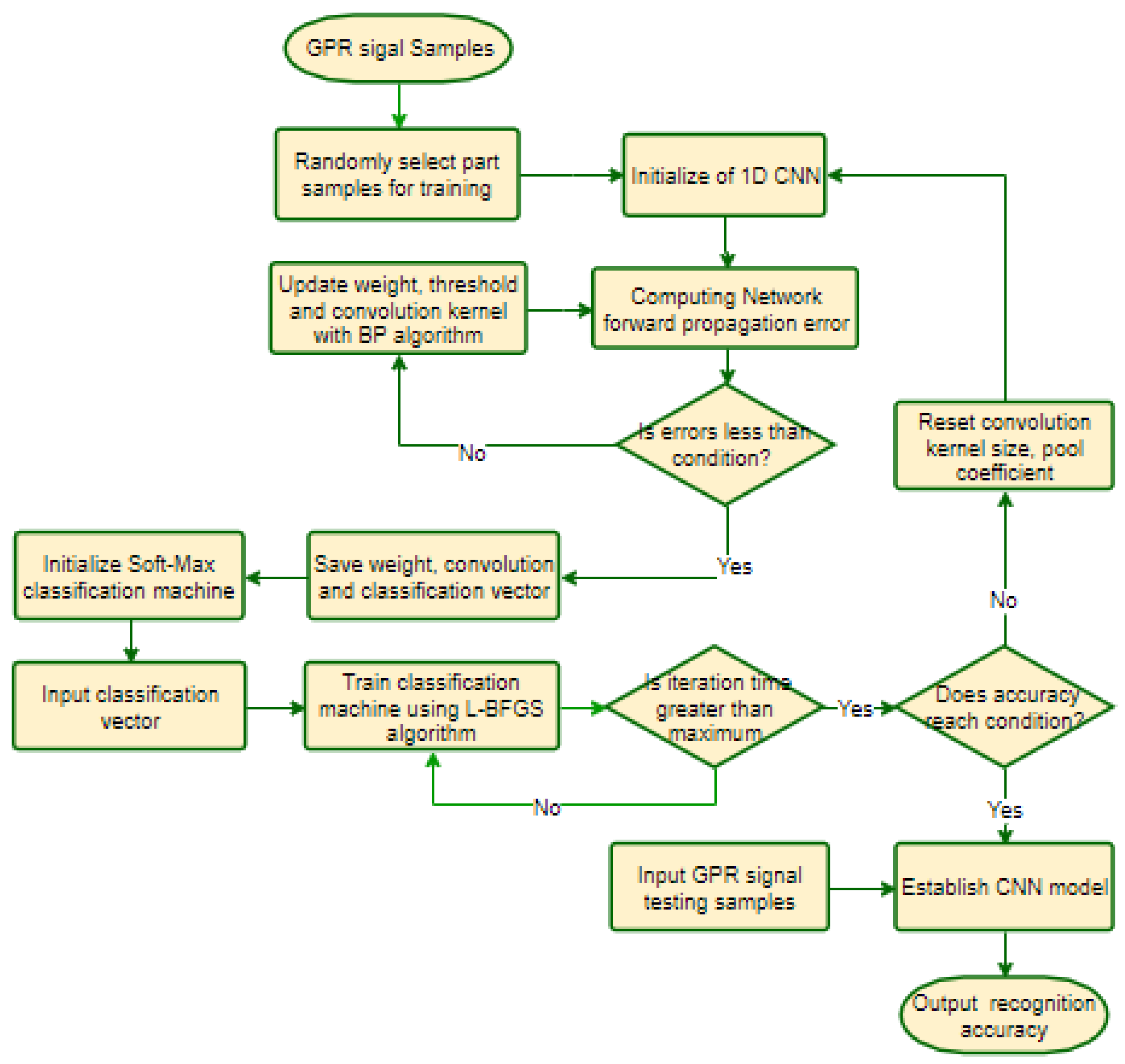
3.2. Design and Hyperparameter Optimization of 1D-CNN
3.2.1. Effect Analysis of the Size of Convolution Layer Neurons
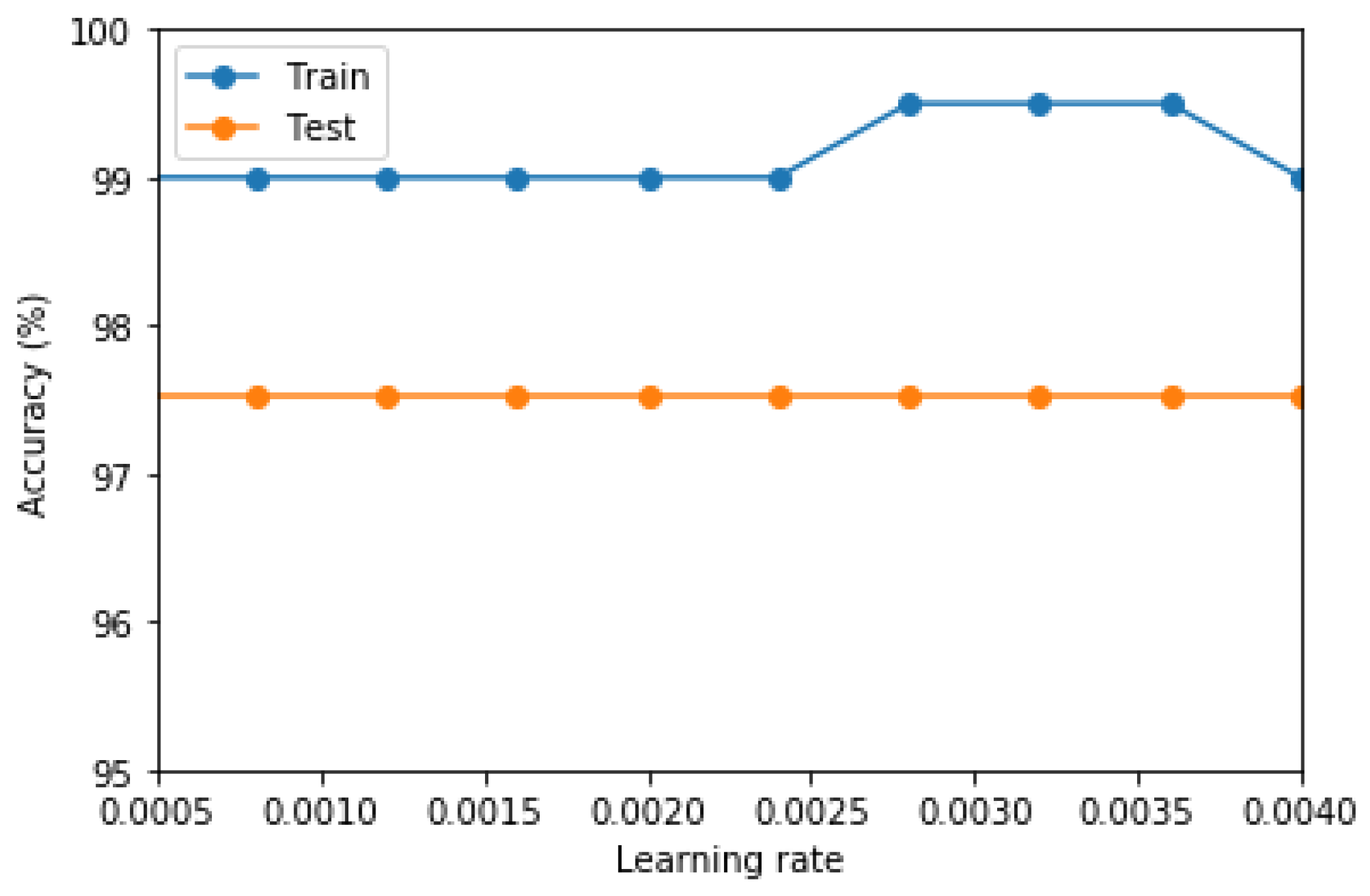
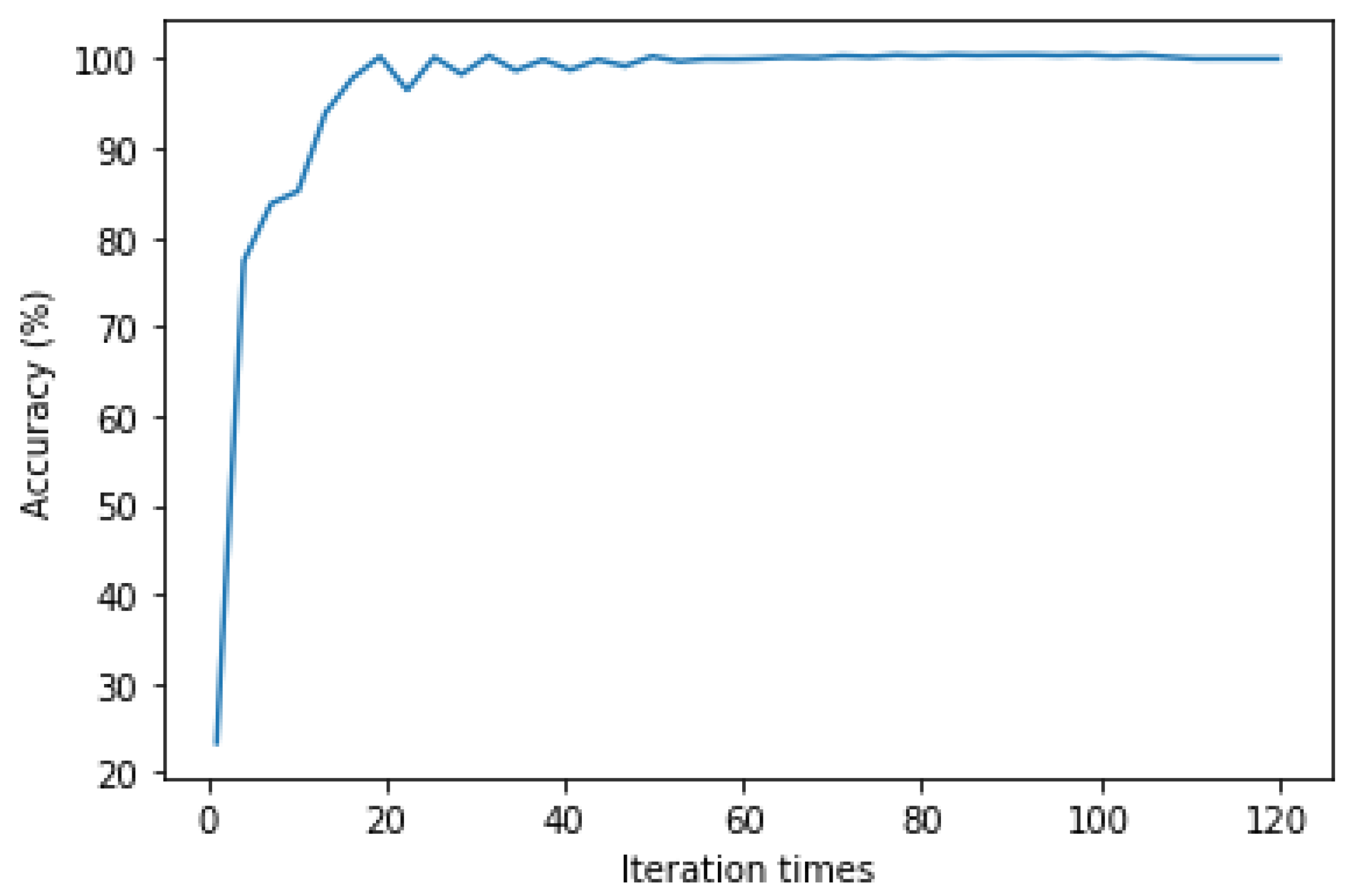
3.2.2. Effect Analysis of the Learning Rate and Training Iterations
3.3. Performance Analysis and Comparison of the 1D-CNN
3.3.1. D-CNN Performance Analysis
3.3.2. Performance Comparison of Different Methods
4. Engineering Application
4.1. Distress Recognization in Pavement Engineering
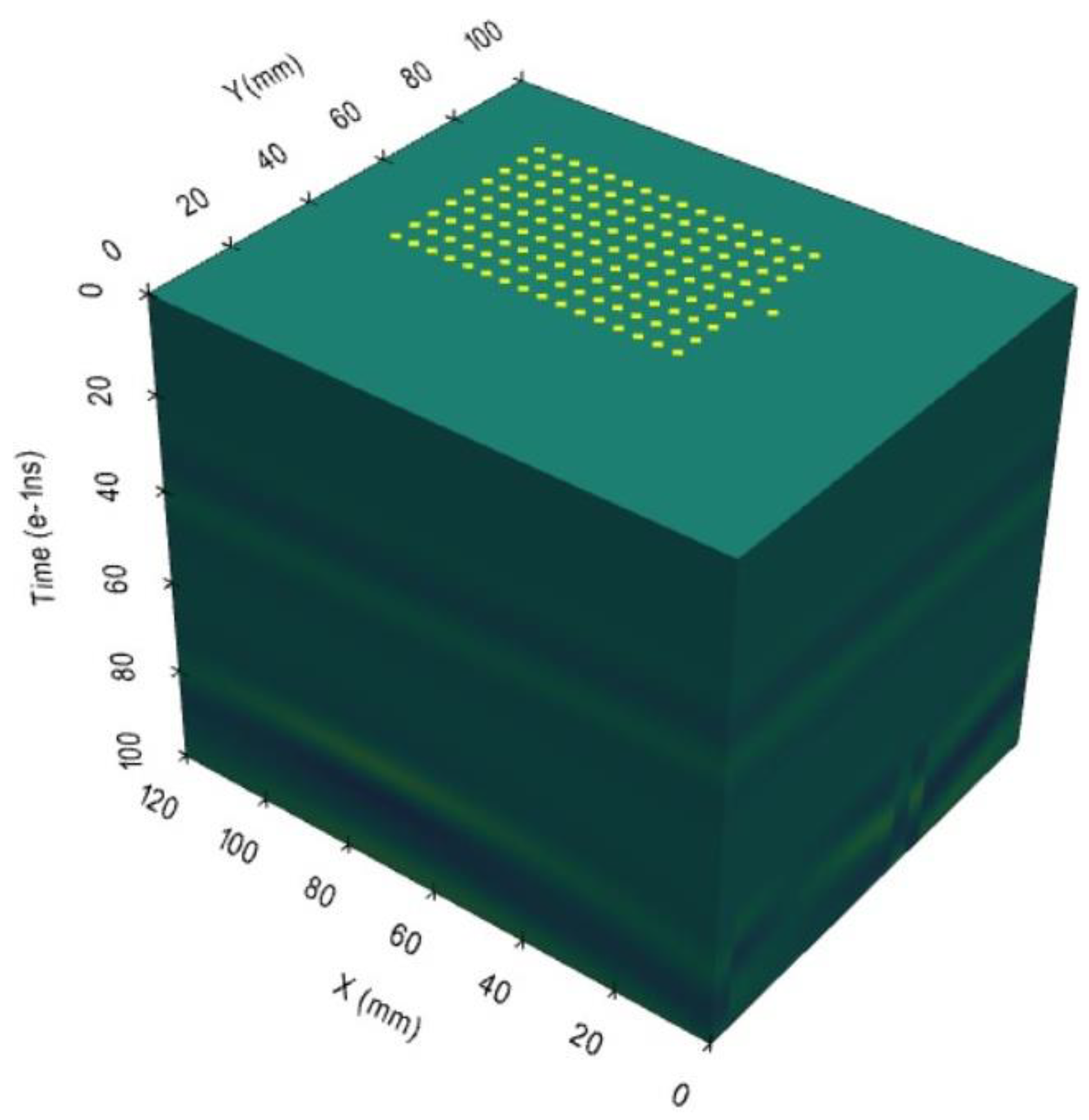
4.2. Interpretation of 3D-GPR Detection
5. Conclusions
- (1)
- The 1D-CNNModel is alternately constituted of 1D convolution layers and pool layers to extract the radar echo signal features. This method solves the problem that conventional CNN has of only fitting to 2D image recognition of GPR. The 1D-CNN directly recognizes the distress in the pavement from the GPR 1D echo signal.
- (2)
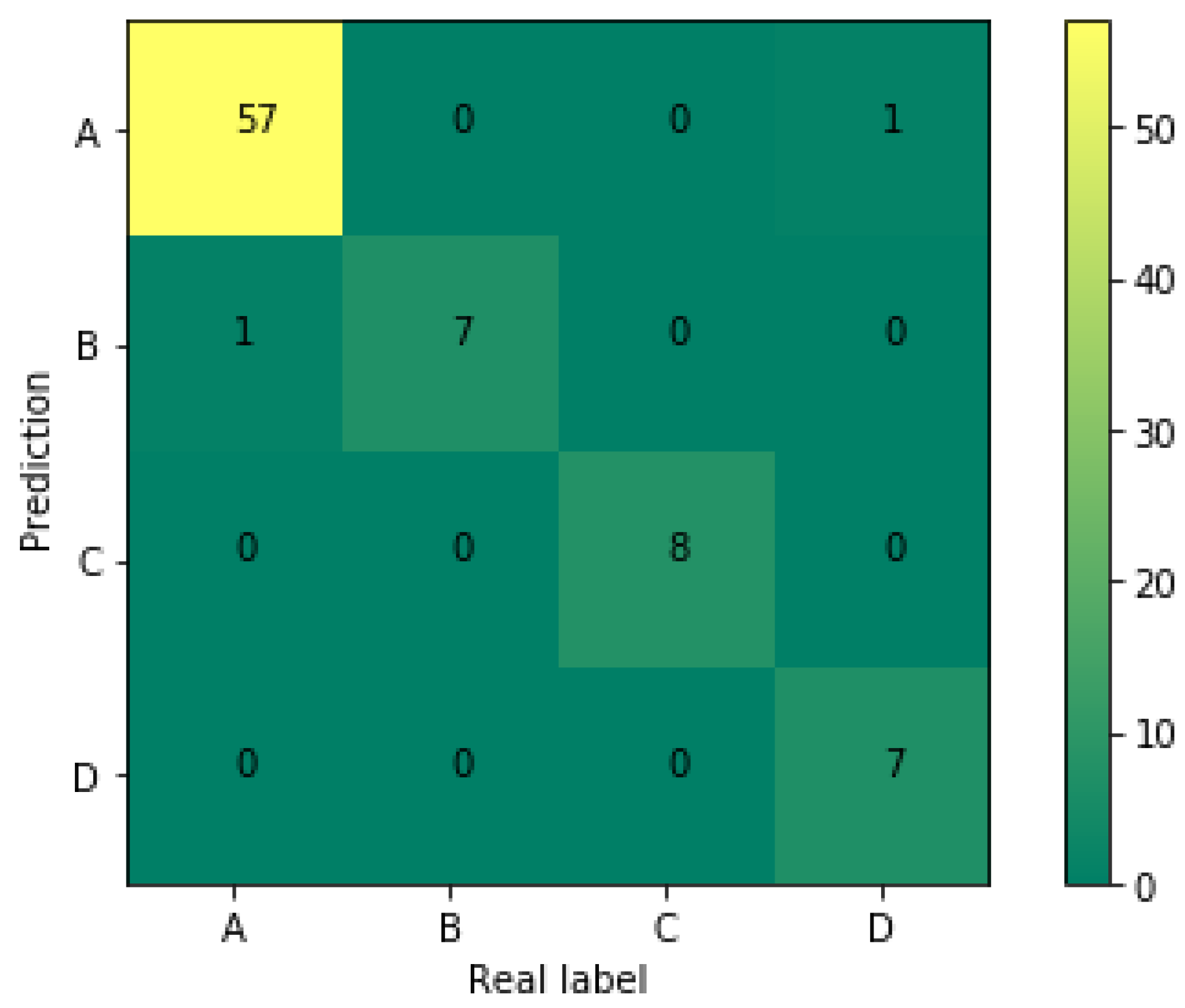
- The 1D-CNNModel not only can effectively recognize the pavement distress using the GPR signal, but also it can correctly identify different types of distress. Its classification accuracy is higher than 96%. It gives a dominant performance in recognition of concrete pavement distress.
- (3)
- Based on the performance comparison of 1D-CNN and several conventional machine learning models, the accuracy of the 1D-CNNModel is the highest and has the best classification effect in the identification of concrete distress.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lai, W.W.-L.; Derobert, X.; Annan, P. A review of Ground Penetrating Radar application in civil engineering: A 30-year journey from Locating and Testing to Imaging and Diagnosis. NDT E Int. 2018, 96, 58–78. [Google Scholar]
- Schnebele, E.; Tanyu, B.; Cervone, G.; Waters, N. Review of remote sensing methodologies for pavement management and assessment. Eur. Transp. Res. Rev. 2015, 7, 7. [Google Scholar] [CrossRef]
- Hoła, J.; Schabowicz, K. State-of-the-art non-destructive methods for diagnostic testing of building structures–anticipated development trends. Arch. Civ. Mech. Eng. 2010, 10, 5–18. [Google Scholar] [CrossRef]
- Annan, A. GPR—History, trends, and future developments. Subsurf. Sens. Technol. Appl. 2002, 3, 253–270. [Google Scholar] [CrossRef]
- Maser, K.; Holland, T.; Roberts, R.; Popovics, J. NDE methods for quality assurance of new pavement thickness. Int. J. Pavement Eng. 2006, 7, 1–10. [Google Scholar] [CrossRef]
- Travassos, X.L.; Avila, S.L.; Ida, N. Artificial neural networks and machine learning techniques applied to Ground penetrating radar: A review. Appl. Comput. Inform. 2018, 17, 296–308. [Google Scholar] [CrossRef]
- Plati, C.; Georgouli, K.; Loizos, A. Review of NDT assessment of road pavements using GPR. In Nondestructive Testing of Materials and Structures; Springer: Berlin/Heidelberg, Germany, 2013; pp. 855–860. [Google Scholar]
- Xu, J.; Lei, B. Data interpretation technology of GPR survey based on variational mode decomposition. Appl. Sci. 2019, 9, 2017. [Google Scholar] [CrossRef]
- Park, B.; Kim, J.; Lee, J.; Kang, M.-S.; An, Y.-K. Underground object classification for urban roads using instantaneous phase analysis of Ground-Penetrating Radar (GPR) Data. Remote Sens. 2018, 10, 1417. [Google Scholar] [CrossRef]
- Dou, Q.; Wei, L.; Magee, D.R.; Cohn, A.G. Real-time hyperbola recognition and fitting in GPR data. IEEE Trans. Geosci. Remote Sens. 2016, 55, 51–62. [Google Scholar] [CrossRef]
- Pasolli, E.; Melgani, F.; Donelli, M. Automatic analysis of GPR images: A pattern-recognition approach. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2206–2217. [Google Scholar] [CrossRef]
- Windsor, C.G.; Capineri, L.; Falorni, P. A data pair-labeled generalized Hough transform for radar location of buried objects. IEEE Geosci. Remote Sens. Lett. 2013, 11, 124–127. [Google Scholar] [CrossRef]
- Ozkaya, U.; Melgani, F.; Bejiga, M.B.; Seyfi, L.; Donelli, M. GPR B scan image analysis with deep learning methods. Measurement 2020, 165, 107770. [Google Scholar] [CrossRef]
- Harkat, H.; Ruano, A.; Ruano, M.G.; Bennani, S.D. GPR target detection using a neural network classifier designed by a multi-objective genetic algorithm. Appl. Soft Comput. 2019, 79, 310–325. [Google Scholar] [CrossRef]
- Sbartaï, Z.; Laurens, S.; Viriyametanont, K.; Balayssac, J.P.; Arliguie, G. Non-destructive evaluation of concrete physical condition using radar and artificial neural networks. Constr. Build Mater. 2009, 23, 837–845. [Google Scholar] [CrossRef]
- Xie, X.; Qin, H.; Yu, C.; Liu, L. An automatic recognition algorithm for GPR images of RC structure voids. J. Appl. Geophys. 2013, 99, 125–134. [Google Scholar] [CrossRef]
- Wang, J.; Hu, J. A robust combination approach for short-term wind speed forecasting and analysis–Combination of the ARIMA (Autoregressive Integrated Moving Average), ELM (Extreme Learning Machine), SVM (Support Vector Machine) and LSSVM (Least Square SVM) forecasts using a GPR (Gaussian Process Regression) model. Energy 2015, 93, 41–56. [Google Scholar]
- Asadi, P.; Gindy, M.; Alvarez, M. A machine learning based approach for automatic rebar detection and quantification of deterioration in concrete bridge deck ground penetrating radar B-scan images. KSCE J. Civ. Eng. 2019, 23, 2618–2627. [Google Scholar] [CrossRef]
- Li, W.; Cui, X.; Guo, L.; Chen, J.; Chen, X.; Cao, X. Tree root automatic recognition in ground penetrating radar profiles based on randomized Hough transform. Remote Sens. 2016, 8, 430. [Google Scholar] [CrossRef]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef]
- Guo, Y.; Liu, Y.; Oerlemans, A.; Lao, S.; Wu, S.; Lew, M.S. Deep learning for visual understanding: A review. Neurocomputing 2016, 187, 27–48. [Google Scholar] [CrossRef]
- Hirschberg, J.; Manning, C.D. Advances in natural language processing. Science 2015, 349, 261–266. [Google Scholar] [CrossRef]
- Kooi, T.; Litjens, G.; Van Ginneken, B.; Gubern-Mérida, A.; Sánchez, C.I.; Mann, R.; den Heeten, A.; Karssemeijer, N. Large scale deep learning for computer aided detection of mammographic lesions. Med. Image Anal. 2017, 35, 303–312. [Google Scholar] [CrossRef]
- Jing, L.; Zhao, M.; Li, P.; Xu, X. A convolutional neural network based feature learning and fault diagnosis method for the condition monitoring of gearbox. Measurement 2017, 111, 1–10. [Google Scholar] [CrossRef]
- Kim, N.; Kim, S.; An, Y.-K.; Lee, J.-J. A novel 3D GPR image arrangement for deep learning-based underground object classification. Int. J. Pavement Eng. 2019, 22, 1–12. [Google Scholar] [CrossRef]
- Xu, J.; Shen, Z. Recognition of the Distress in Concrete Pavement Using Deep Learning Based on GPR Image. In Proceedings of the Structural Health Monitoring 2019, Standford, CA, USA, 10–12 September 2019. [Google Scholar] [CrossRef]
- Chae, J.; Ko, H.-y.; Lee, B.-g.; Kim, N. A Study on the Pipe Position Estimation in GPR Images Using Deep Learning Based Convolutional Neural Network. J. Internet Comput. Serv. 2019, 20, 39–46. [Google Scholar]
- Park, S.; Kim, J.; Kim, W.; Kim, H.; Park, S. A Study on the Prediction of Buried Rebar Thickness Using CNN Based on GPR Heatmap Image Data. J. Korea Inst. Struct. Maint. Insp. 2019, 23, 66–71. [Google Scholar]
- Dinh, K.; Gucunski, N.; Duong, T.H. An algorithm for automatic localization and detection of rebars from GPR data of concrete bridge decks. Autom. Constr. 2018, 89, 292–298. [Google Scholar] [CrossRef]
- Agred, K.; Klysz, G.; Balayssac, J.-P. Location of reinforcement and moisture assessment in reinforced concrete with a double receiver GPR antenna. Constr. Build Mater. 2018, 188, 1119–1127. [Google Scholar] [CrossRef]
- Kim, N.; Kim, K.; An, Y.-K.; Lee, H.-J.; Lee, J.-J. Deep learning-based underground object detection for urban road pavement. Int. J. Pavement Eng. 2018, 21, 1638–1650. [Google Scholar] [CrossRef]
- Song, L.; Wang, X. Faster region convolutional neural network for automated pavement distress detection. Road Mater. Pavement Des. 2019, 22, 23–41. [Google Scholar] [CrossRef]
- Kiranyaz, S.; Ince, T.; Gabbouj, M. Real-time patient-specific ECG classification by 1-D convolutional neural networks. IEEE Trans. Biomed. Eng. 2015, 63, 664–675. [Google Scholar] [CrossRef] [PubMed]
- Acharya, U.R.; Fujita, H.; Lih, O.S.; Adam, M.; Tan, J.H.; Chua, C.K. Automated detection of coronary artery disease using different durations of ECG segments with convolutional neural network. Knowl. Based Syst. 2017, 132, 62–71. [Google Scholar] [CrossRef]
- Cho, H.; Yoon, S.M. Divide and conquer-based 1D CNN human activity recognition using test data sharpening. Sensors 2018, 18, 1055. [Google Scholar]
- Eren, L.; Ince, T.; Kiranyaz, S. A generic intelligent bearing fault diagnosis system using compact adaptive 1D CNN classifier. J. Signal Process. Syst. 2019, 91, 179–189. [Google Scholar] [CrossRef]
- Kiranyaz, S.; Avci, O.; Abdeljaber, O.; Ince, T.; Gabbouj, M.; Inman, D.J. 1D convolutional neural networks and applications: A survey. Mech. Syst. Signal Process. 2021, 151, 107398. [Google Scholar] [CrossRef]
- Liu, D.C.; Nocedal, J. On the limited memory BFGS method for large scale optimization. Math. Program. 1989, 45, 503–528. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Neuron Configuration | Recognition Accuracy (%) | Training Time (s) | |
|---|---|---|---|
| Train | Test | ||
| 16, 8 | 93.00 | 90.12 | 11.75 |
| 32, 8 | 94.50 | 91.19 | 18.06 |
| 32, 16 | 96.00 | 93.83 | 20.78 |
| 64, 16 | 96.50 | 92.59 | 31.92 |
| 64, 32 | 96.50 | 92.59 | 35.57 |
| 128, 32 | 97.00 | 96.30 | 59.64 |
| 128, 64 | 97.00 | 96.30 | 66.38 |
| 256, 64 | 97.00 | 95.06 | 113.30 |
| ML Algorithm | Recognition Accuracy (%) | Training Time (s) | |
|---|---|---|---|
| Train | Test | ||
| BP | 67.00 | 61.72 | 3.8 |
| SVM | 86.50 | 82.50 | 19.61 |
| ELM | 69.50 | 64.20 | 0.0012 |
| Adaboost | 96.00 | 90.12 | 1.34 |
| 1D-CNN | 97.00 | 96.30 | 66.38 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, J.; Zhang, J.; Sun, W. Recognition of the Typical Distress in Concrete Pavement Based on GPR and 1D-CNN. Remote Sens. 2021, 13, 2375. https://doi.org/10.3390/rs13122375
Xu J, Zhang J, Sun W. Recognition of the Typical Distress in Concrete Pavement Based on GPR and 1D-CNN. Remote Sensing. 2021; 13(12):2375. https://doi.org/10.3390/rs13122375
Chicago/Turabian StyleXu, Juncai, Jingkui Zhang, and Weigang Sun. 2021. "Recognition of the Typical Distress in Concrete Pavement Based on GPR and 1D-CNN" Remote Sensing 13, no. 12: 2375. https://doi.org/10.3390/rs13122375
APA StyleXu, J., Zhang, J., & Sun, W. (2021). Recognition of the Typical Distress in Concrete Pavement Based on GPR and 1D-CNN. Remote Sensing, 13(12), 2375. https://doi.org/10.3390/rs13122375