
Roundabout Trajectory Planning: Integrating Human Driving Models for Autonomous Vehicles



Abstract
:1. Introduction
- Reducing human error: AVs are not prone to the same human errors that can lead to accidents, such as distraction, fatigue and drunk driving;
- Improve environmental awareness: AVs can use sensors to recognize road conditions in real time, including friction conditions;
- Adjusting speed and trajectory more efficiently: AVs can use friction data to adjust speed and trajectory more efficiently, reducing the risk of accidents.
- (1)
- Interaction with other vehicles: In contexts where autonomous vehicles have to interact with other vehicles on the roads, human driving models can provide valuable insights into driver behavior and driving dynamics. By studying and learning from human driver data, autonomous vehicles can learn how to behave in complex situations such as standard intersections, roundabouts, or curves. For example, human driving models can provide information on trajectory choices, appropriate speeds in certain situations, and common driving habits. This information can be used by autonomous vehicles to make safer and more predictable decisions during interactions with other vehicles on the road.
- (2)
- Limited interaction scenarios: Even when interactions with other vehicles are rare or limited, human driving models can be useful for autonomous vehicles. For example, in autonomous driving situations in rural areas or areas with low traffic density, vehicles encounter fewer or no vehicles. Nevertheless, human driving models can provide information on how to handle certain road elements with conditional geometry (curves, roundabouts, highway ramps, etc.) or traffic signs or adverse weather conditions. Additionally, human driving models can be used to provide a more comfortable and familiar driving experience for passengers. For instance, if a human driver prefers gradual acceleration or gentle braking in certain situations, the autonomous vehicle can learn such habits and replicate them to provide a more human-like driving experience.
- (a)
- Real-world data: Naturalistic speed profiles are based on real data collected from vehicles in real driving conditions. These data represent the actual behavior of human drivers in real-world situations, allowing the human driving models to learn from authentic experiences. This helps make the models more accurate and adaptable to various road situations.
- (b)
- Contextual variation: Naturalistic speed profiles capture the variations in speed in different driving situations and contexts. This includes information about average speeds, maximum speeds, and typical decelerations/accelerations in certain areas or types of roads. Learning from these variations allows the driving models to guide autonomous vehicles to behave more realistically and consistently with human drivers in different scenarios, improving safety and efficiency in the autonomous driving system.
- (c)
- Consideration of individual preferences: Naturalistic speed profiles can also reflect individual driver preferences regarding speed and driving style. These preferences can be learned and taken into account by the human driving models during the learning process of autonomous vehicles. This enables autonomous vehicles to adapt to the preferences of human drivers or passengers, providing a more familiar and personalized driving experience.
- (d)
- Performance enhancement: Using naturalistic speed profiles can contribute to overall performance improvements in autonomous vehicles. For example, they can be used to fine-tune control algorithms, improve trajectory planning, or optimize acceleration and deceleration strategies. Integrating real driver data into the human driving models helps autonomous vehicles learn from realistic driving examples and develop more effective driving strategies.
- These profiles help autonomous vehicles understand appropriate speeds, acceleration, and deceleration required for safe driving.
- Contextualized speed profiles help autonomous vehicles make more informed decisions based on specific road contexts. For example, they enable speed adjustment based on the presence of other vehicles in roundabouts or traffic conditions.
- Naturalistic speed profiles allow autonomous vehicles to adapt to different roundabout geometries, and to understand and respect the laws of physics governing the dynamic behavior of vehicles. This includes managing centripetal force, optimizing tire friction and grip, and maintaining stability during curves.
- Naturalistic speed profiles can be used for validation and testing of autonomous driving systems. They allow comparing the behavior of autonomous vehicles with known human speed profiles to evaluate the effectiveness of the autonomous system and identify any necessary improvements.
- ➢
- Predictable behavior: The fastest crossing trajectory with no interaction with other road users represents a predictable and safe behavior model that has been solidified by human driver experience. Validation and testing of autonomous vehicles on this route allows them to learn and adopt behaviors that humans recognize as effective.
- ➢
- Safety: crossing roundabouts quickly and efficiently can contribute to road safety. Modeling autonomous vehicles on the fastest crossing route can verify that the autonomous system can maintain an appropriate speed and perform the proper maneuvers to safely traverse the roundabout, avoiding slowdowns and potential hazards.
- ➢
- Optimizing traffic flow: the correct behavior of autonomous vehicles when passing through single-lane roundabouts can help optimize traffic flow. If autonomous vehicles follow the fastest crossing trajectory without interacting with other road users, they can help reduce roundabout crossing times and improve traffic flow.
- ➢
- Adaptation to road conditions: Naturalistic speed profiles based on the fastest crossing trajectory can vary depending on the geometric characteristics of roundabouts. The model to be proposed allows autonomous vehicles to adapt to different roundabout configurations, such as diameter, entry radius, exit radius, deflection angle, and lane width. In this way, autonomous vehicles can learn the appropriate behavior and be able to negotiate single-lane roundabouts safely and efficiently, regardless of the specific geometric specifications.
2. Literature Review
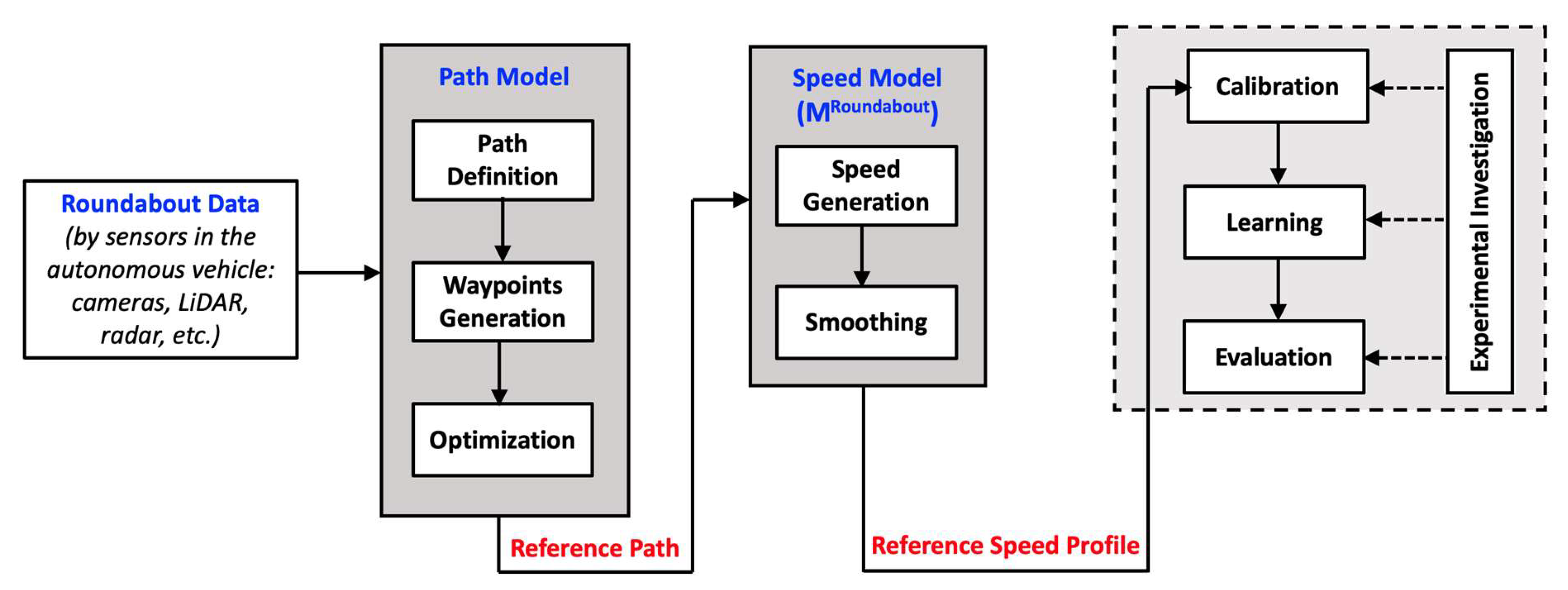
3. Model Design
3.1. Path Model
- (1)
- A priori definition of the path: It is necessary to define in advance the path that the autonomous vehicle must follow to cross the roundabout. The path can be mapped based on appropriate assumptions, e.g., assuming that the vehicle must follow a curved path within the lane, maintaining a constant distance from the inner edges of the circulatory roadway. To achieve this goal, this study uses the fastest path for crossing a single-lane roundabout, as described in accordance with guidance in NCHRP Report 672 [42].
- (2)
- Waypoints generation: The predefined path can be represented by a series of control points (waypoints) that indicate the ideal position of the vehicle along the path. These waypoints can be generated manually or by algorithms that take into account the geometry of the roundabout and the formulated assumptions. The waypoints should be arranged to ensure smooth and safe navigation through the roundabout.
- (3)
- Least squares optimization: Using the Levenberg–Marquardt algorithm, it is possible to optimize the through path based on the least squares formula. In this case, the objective is to minimize the difference between the desired path (represented by the waypoints) and the actual path of the autonomous vehicle. The Levenberg–Marquardt algorithm iteratively updates the model parameters to approach the optimal solution.
- ➢
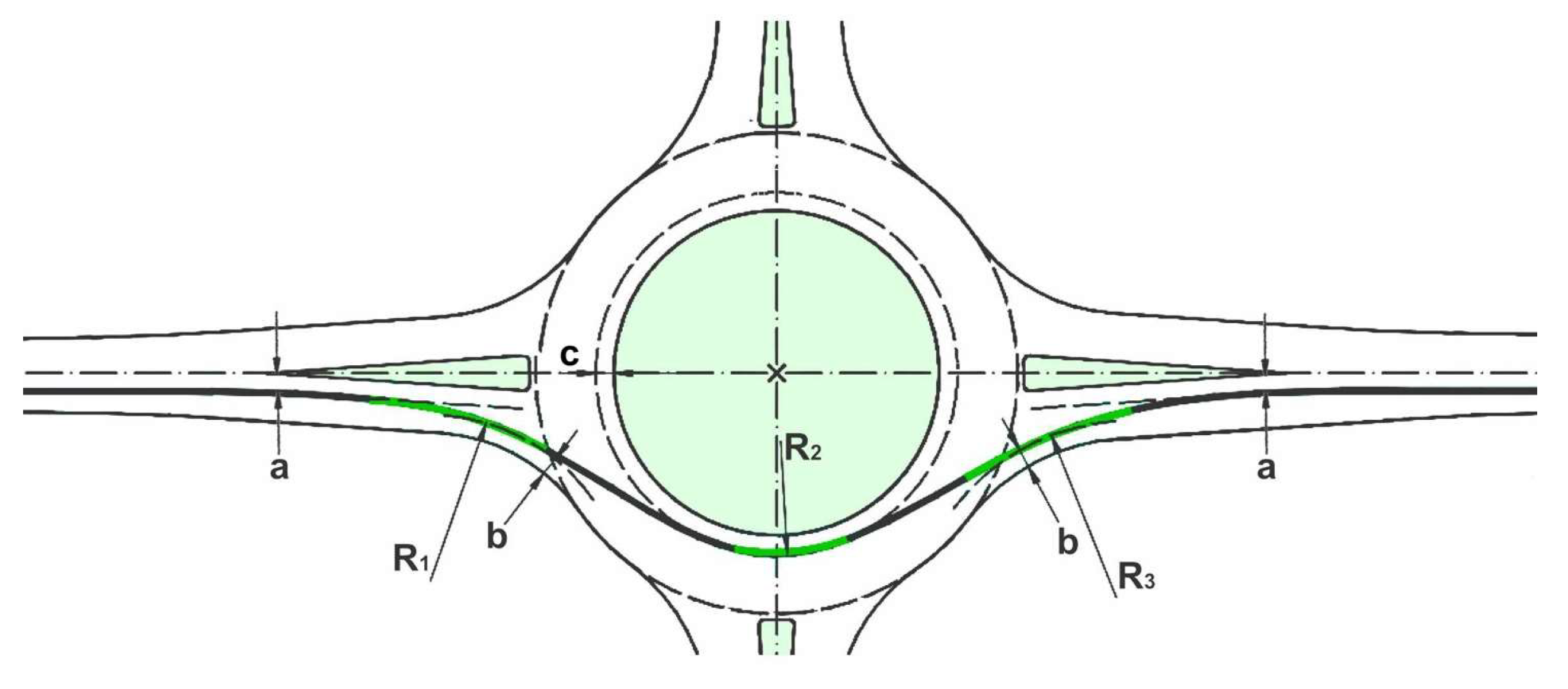
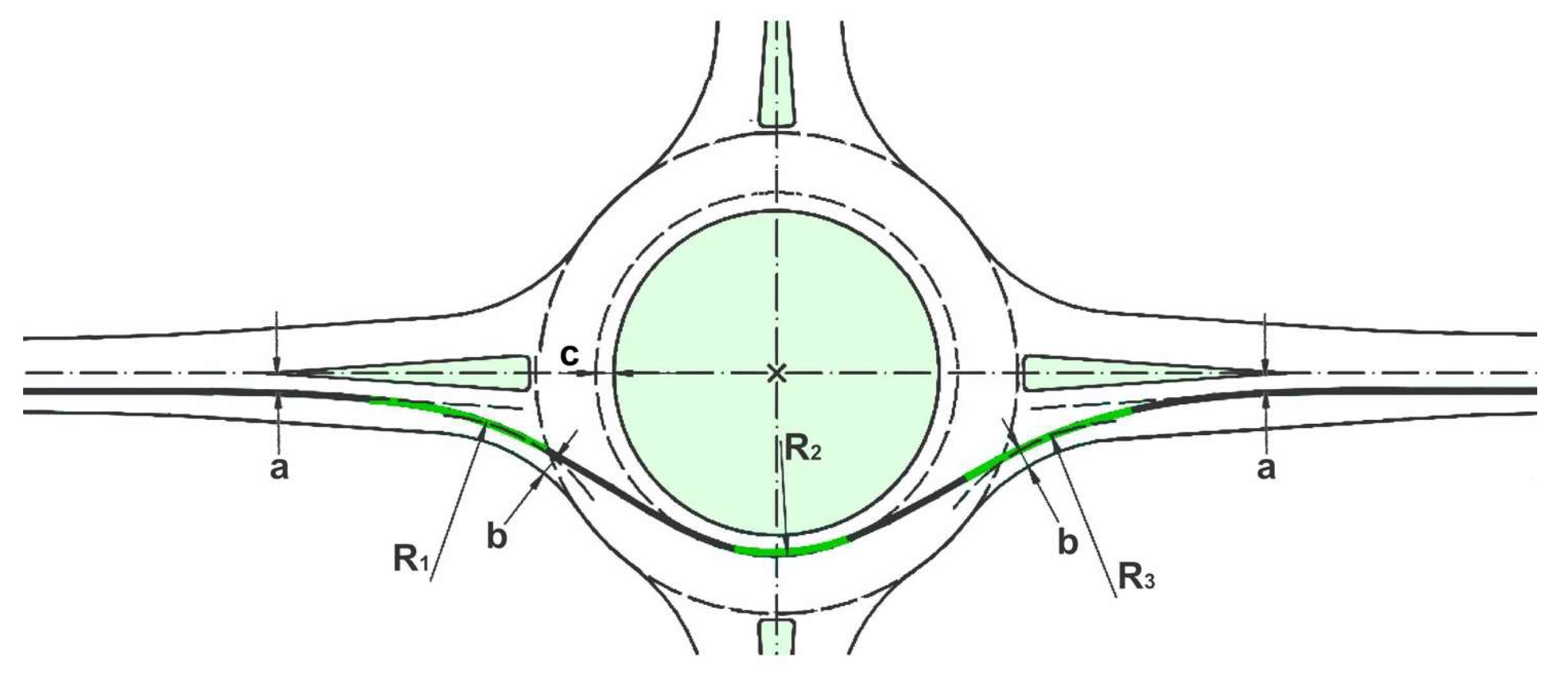
- Path definition: The path for crossing the roundabout is determined following the NCHRP model of path [42]. This model is based on the concept of the “fastest through route”, which is determined by the geometry of the roundabout and sets the negotiation speed for each movement—entry, circulation around the central island and exit. This path represents the smoothest and flattest trajectory possible for a single vehicle, assuming there is no other traffic and the lane markings are disregarded.
- Entry path radius (R1): this is the minimum radius on the fastest through path before reaching the entry line;
- Radius of the circulation path (R2): this is the minimum radius on the fastest through path as the vehicle circulates around the center island;
- Exit path radius (R3): this is the minimum radius on the fastest transit path as the vehicle leaves the island.
- 1.0 m from a painted edge line;
- 1.5 m from a concrete curb;
- 1.5 m from a roadway centerline.
- ➢
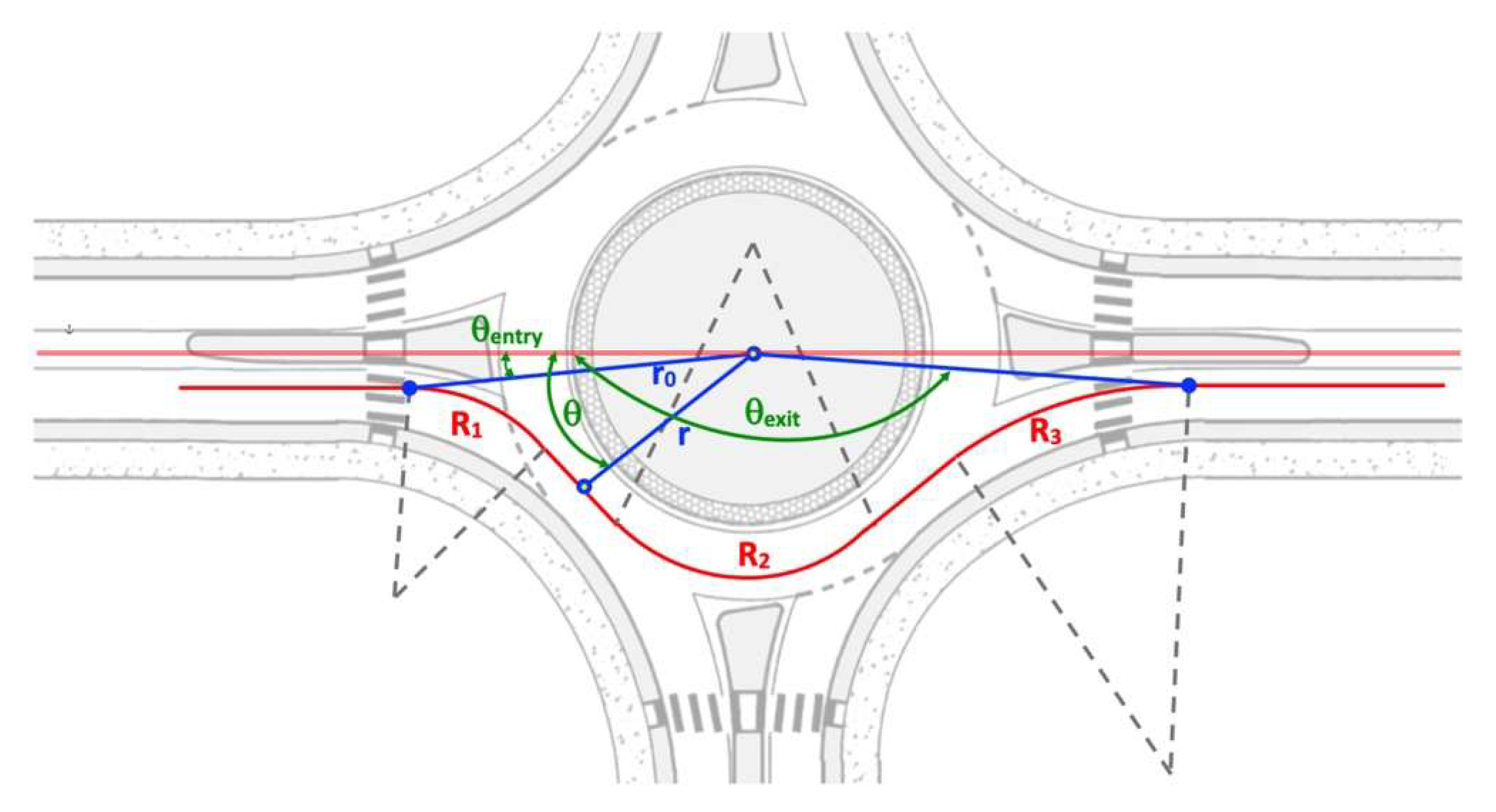
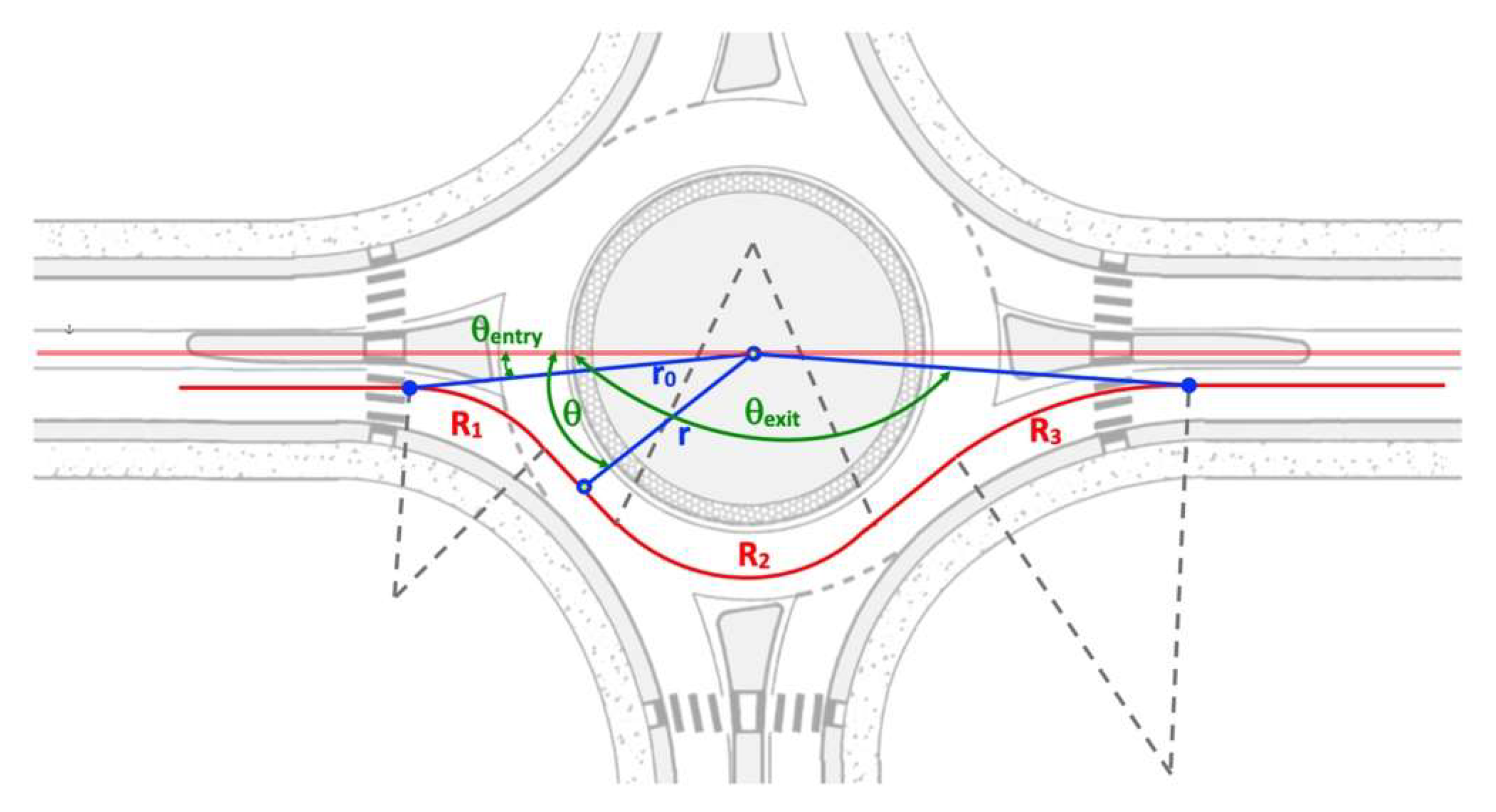
- Parametric representation of the path: To describe the path through the roundabout, a parametric representation is used (Figure 3). In polar coordinates, where r is the radial distance from the center of the roundabout and θ is the angle relative to the horizontal axis, the path is expressed aswhere r0 represents the initial distance from the roundabout, a governs the curvature of the path, and θ varies from the entry angle (θentry) to the exit angle (θexit).r(θ)= r0 + a⋅θ2
- ➢
- Least squares formulation: The objective is to minimize the error between the calculated path (pcalculated) and the desired path (pdesired). The objective function is the sum of squared differences:
- ➢
- Levenberg–Marquardt Algorithm: The Levenberg–Marquardt algorithm is employed to minimize the objective. During iteration k, the model parameters (r0 and a) are updated using the Jacobian matrix of partial gradients. The updates are given by
- ➢
- Iteration and convergence: The Levenberg–Marquardt algorithm continues iteratively until acceptable convergence is achieved or a maximum number of iterations is reached. In each iteration, parameters are updated according to the algorithm’s formulas, and the objective is gradually reduced.
- ➢
- Path Model output: After completing the optimization with the Levenberg–Marquardt algorithm, the optimal values of parameters r0 and a which define the fastest through path of the roundabout are obtained. These parameters constitute the optimized path for the autonomous vehicle. The final output of the path model consists of these optimal values, enabling the vehicle to safely and efficiently cross the roundabout while adhering to the NCHRP model of the path [42].
3.2. Speed Model
- (1)
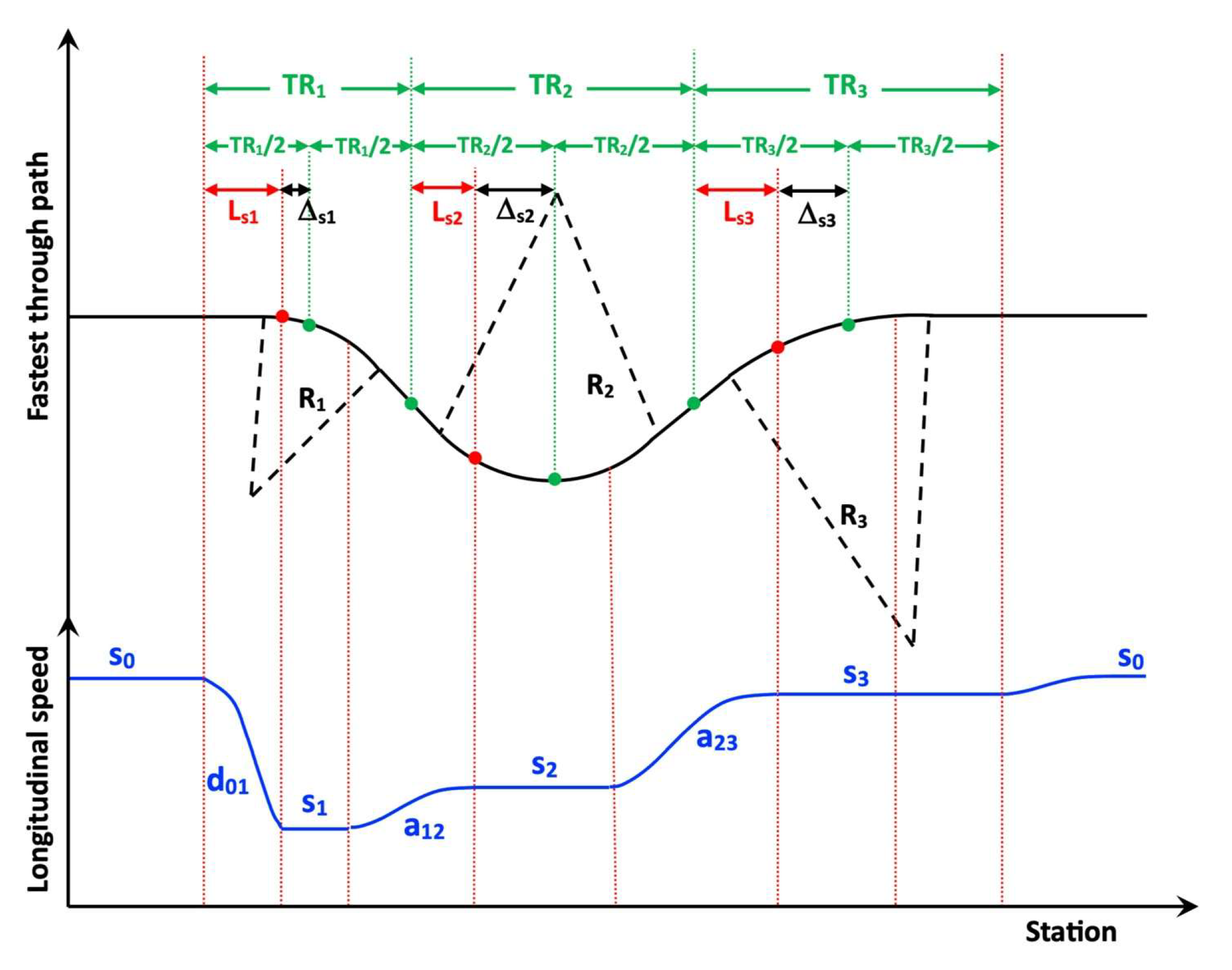
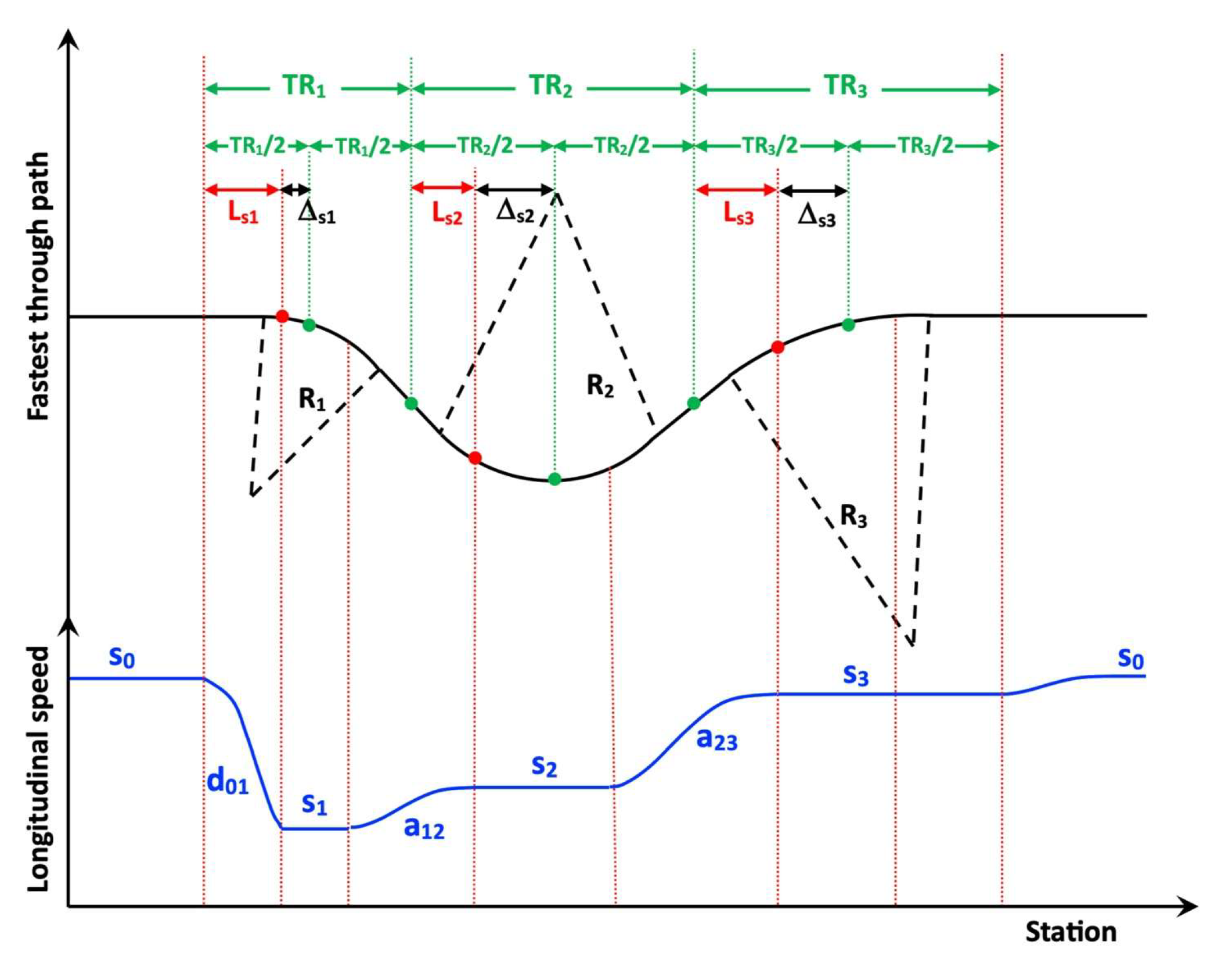
- The entire path is divided into three main “Turning Regions”: TR1 starts at the point before entering the roundabout, from which the vehicle decelerates, and ends in the middle of the section passed under acceleration, between the first and second circular arcs of the path; TR2 starts at the end of the previous region and ends in the middle of the section that is passed under acceleration, between the second and third circular arcs of the path; TR3 starts at the end of the previous region and ends at the point where the user varies their speed (accelerates) after passing the last section with constant curvature of the crossing path.
- (2)
- For each of the “Turning Regions”, the longitudinal distance Lsi is defined (i = 1, 2, 3) between the starting point of the region and the point where the speed value si is reached (with i = 1, 2, 3), which on average remains constant along the maneuver radius within the region itself.
- (3)
- For each of the “Turning Regions”, the longitudinal distanc ∆Si (i = 1, 2, 3) is defined between the central point of the region and the point where the travel starts at constant speed si (i = 1, 2, 3). Thus, ∆Si = TRi/2 − LSi.
- (4)
- In addition:
- s0 = characteristic speed of the road before and after the roundabout. It could also be indicated by vertical signs, and for a particular design there may be other relationships. For example, a curve before the entrance (with radius R0) can determine the speed that can be reached at the entrance. An entry coming from a parking lot may have a much lower speed than an entry coming from a high-speed rural road, even with the same entry geometry [42]. Therefore, the speed s0 may be a constraint that the autonomous vehicle must learn.
- d01 = deceleration from speed s0 to speed s1 typical of the circumference of radius R1 within region TR1.
- a12 = acceleration from speed s1 to speed s2 typical of the circumference of radius R2 within region TR2.
- a23 = acceleration from speed s2 to speed s3 typical of the circumference of radius R3 within region TR3.
- {r(θ)} describes the entire through path;
- Q = [s0, s1, s2, s3, d01, a12, a23, ∆S1, ∆S2, ∆S3]T defines the shape of the speed profile.
4. Model Calibration
5. Experimental Investigation
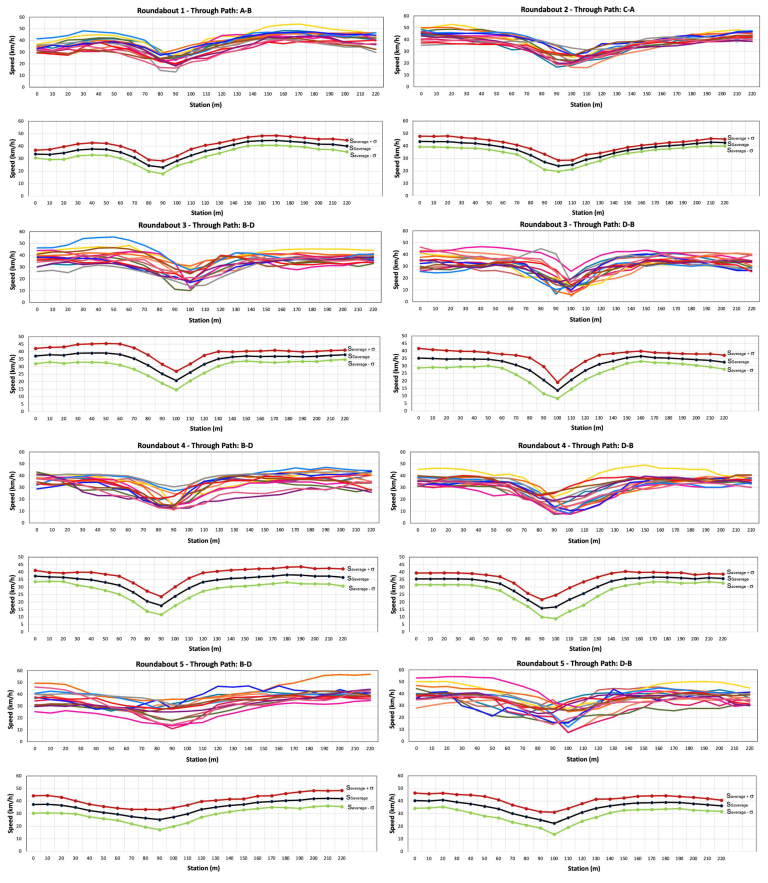
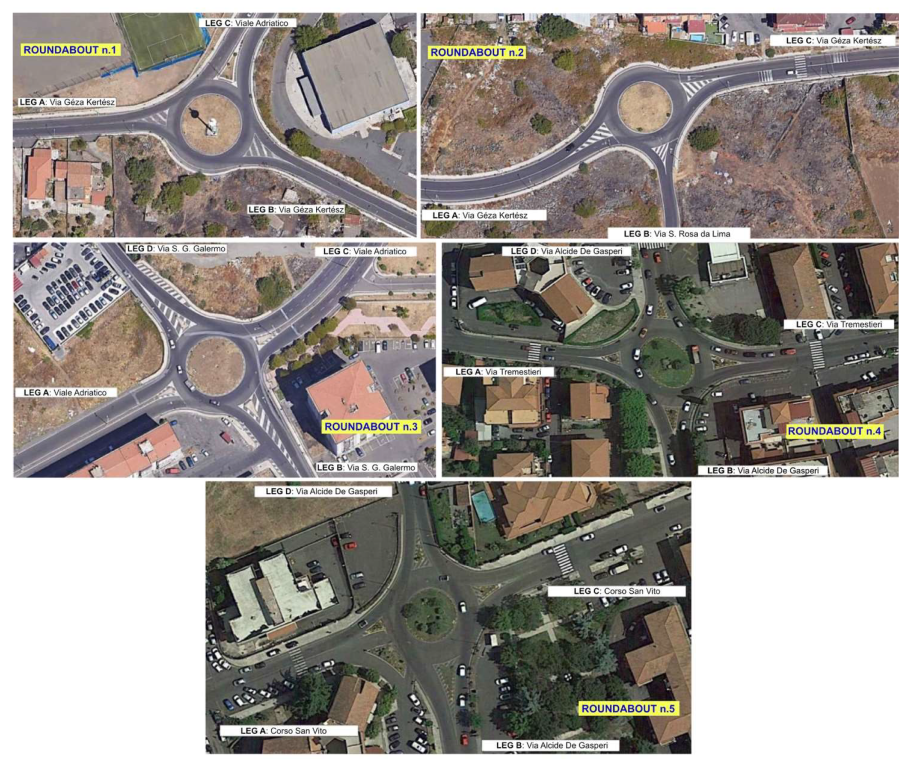
5.1. Selection of Roundabouts
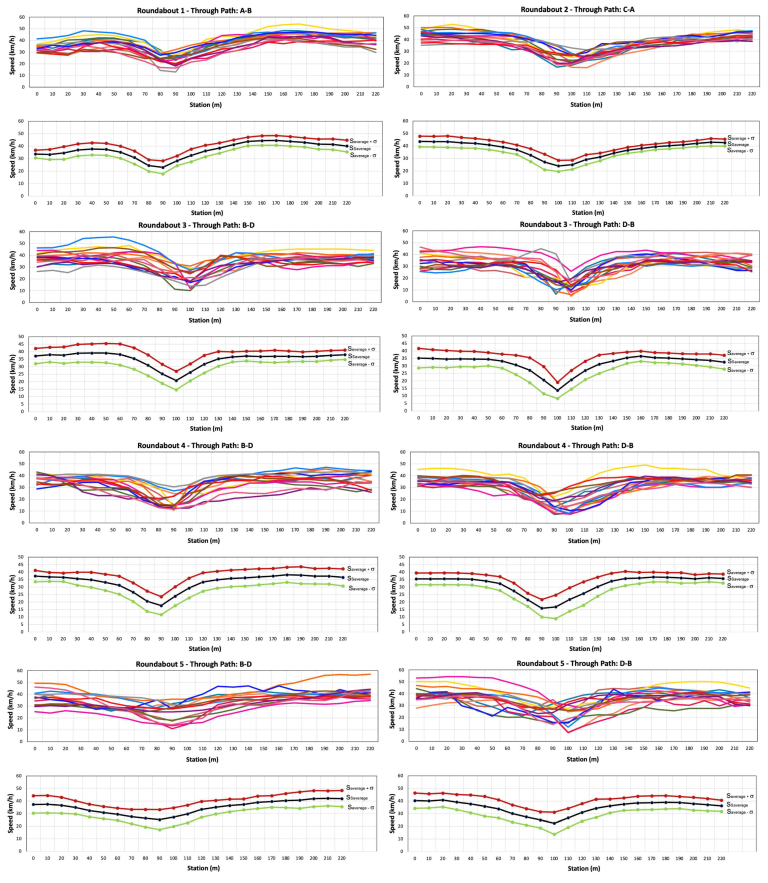
5.2. Data Collection
- ➢
- Each test driver performed all 8 planned crossing maneuvers. The resulting 120 trajectories were considered for the parameter learning phase of the model (see Section 6.1).
- ➢
- Each test driver was asked to repeat one maneuver from those already performed. In this way, the parameters for an additional 15 trajectories were acquired to be used for the evaluation phase of the model (see Section 6.2). These additional maneuvers are adequately specified in Table 2.
6. Results and Discussion
6.1. Learning Results and Discussion
- (1)
- For each of the 120 crossing paths experimentally performed by the test drivers, the three characteristic radii of the path (R1, R2 e R3) that characterize the curvature of the three turning regions (TR1, TR2 e TR3) were evaluated, again as a function of the geometric characteristics of the roundabouts;
- (2)
- With respect to each of the trajectories obtained through the experimental study, the average speed values (s1, s2, s3) corresponding to the radii that make up the turning regions were also obtained;
- (3)
- For each trajectory, the average values of the deceleration (d01) characteristic of the first turning region and of the accelerations (a12 and a13) for the two following turning regions were calculated;
- (4)
- The distances ∆S1, ∆S2 and ∆S3 were also determined starting from the data of the trajectories obtained experimentally, after determining for each trajectory the extent of each turning region and the transition points between the sections covered with deceleration/acceleration and those covered with constant speed;
- (5)
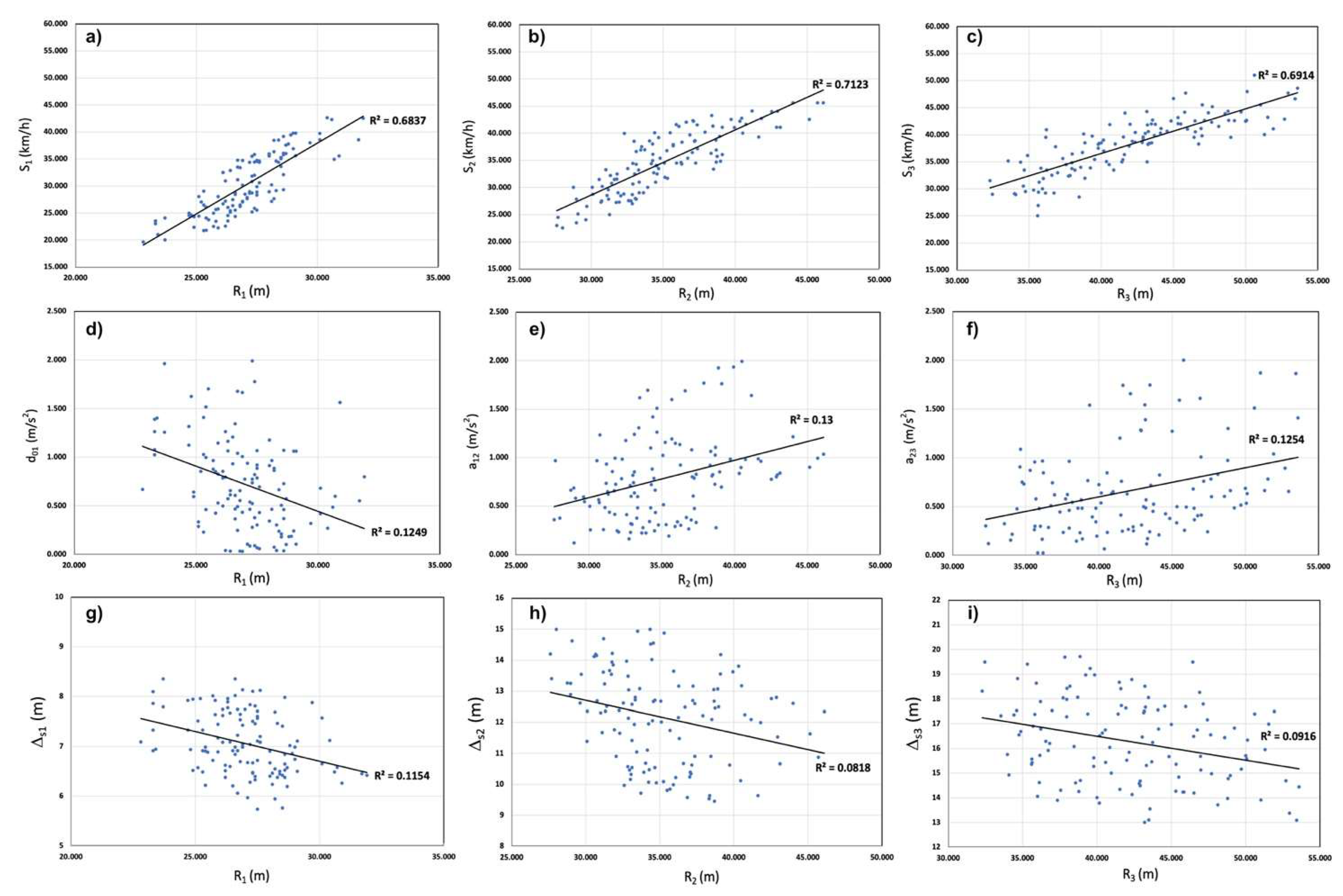
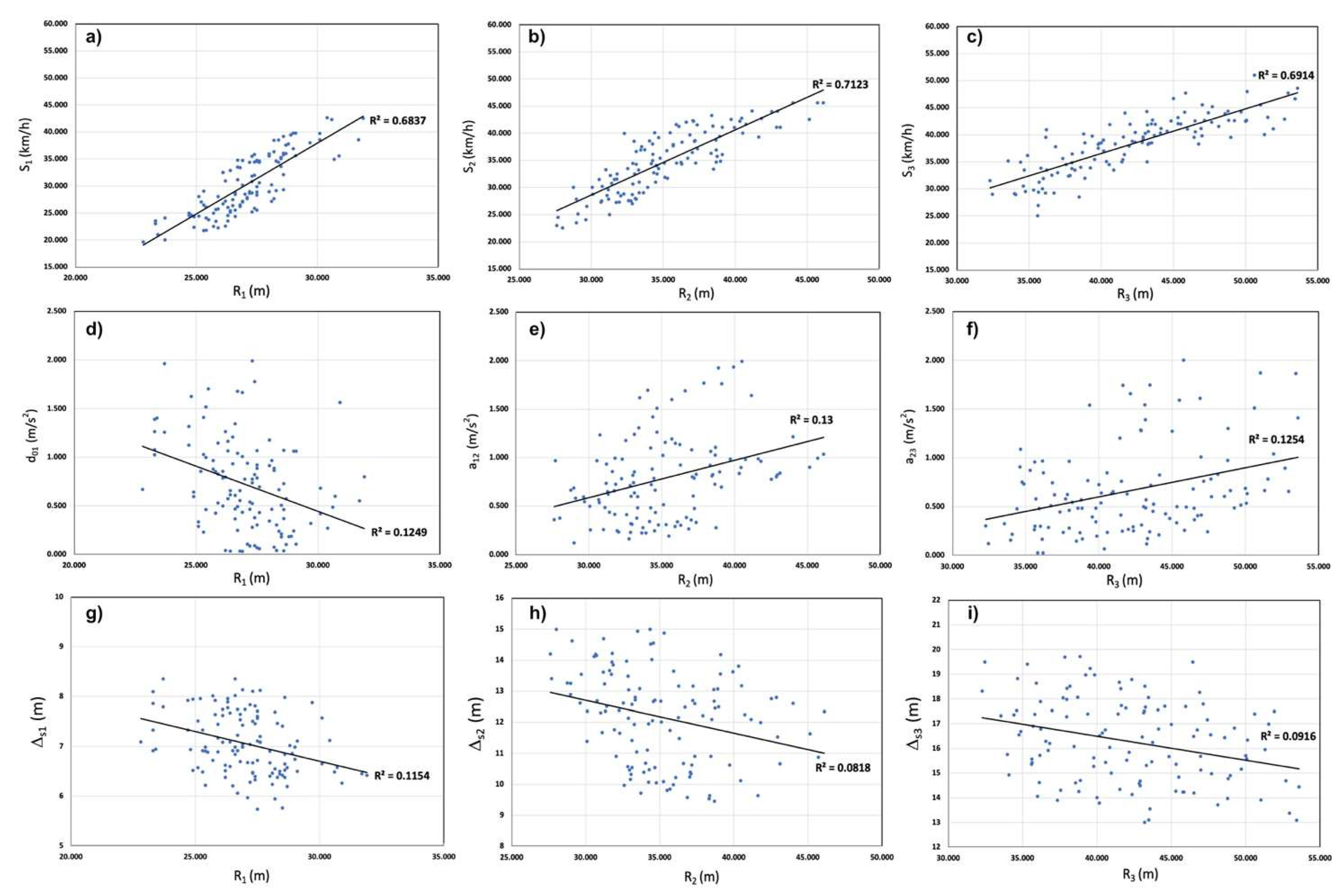
- The nine parameters of the speed model evaluated experimentally for each of the three curve regions were plotted in different scatter plots as a function of the values of the characteristic radii;
- (6)
- Linear regressions were used to learn the correlations between the parameters of interest and, consequently, to explain the formulations describing the variability of the statistically learned parameters.
- ➢
- Strong linearity in s1, s2, and s3: The analysis showed a strong linear correlation between the speeds s1, s2, and s3 and the radii of curvature characterizing the three turning regions. In other words, as logically expected, as the radius of curvature decreased, the speed of execution of the maneuver to also decrease [28,29]. Specifically, it was observed that the highest degree of linearity was evident at speed s1 when the radius values R1 fell within the range of 25 m to 28 m (with a variation of ΔR1 = 3 m). This corresponds to a speed change ranging from 23 km/h to 40 km/h (with a variation of ΔS1 = 17 km/h). With respect to speed s2, the strongest linearity occured for values of R2 between 34 m and 44 m (∆R2 = 10 m), where the speed varied between 27 km/h and 46 km/h (∆S2 = 19 km/h). When examining speed s3, it becomes evident that no pronounced linearity exists within the spectrum of radius values R3 (with a total variation in ΔR3 equivalent to 21 m). As a result, the speed variance in the third turning region spanned the complete range between 25 km/h and 51 km/h (with a total variation of ΔS3 equal to 26 km/h). Thus, it is noteworthy that the ΔS and ΔR intervals, which are linked to the growing significance of the correlations between radii and speed, exhibited substantial expansion as the final turning region was approached. This means that road users felt more influenced on the first approach and therefore adopted a more cautious behavior. Conversely, drivers approaching the last part of the trajectory (the exit part) felt less constrained and therefore tended to adopt variable speeds within a very wide range.
- ➢
- Low linearity in d01, a12, and a23: For the MRoundabout model, there was a low level of linearity observed in the parameters d01, a12, and a23. Moreover, the values of the coefficients of determination R2 for all three correlations were almost identical in the scattering diagrams (d, e, and f) shown in Figure 8. A closer analysis of the three diagrams also shows that in none of the diagrams is there such a density of data that highlights a stronger linearity in one part of the diagram compared to other parts. This result suggests that accelerations/decelerations can vary significantly and may be influenced by factors that are hard to quantify, such as the driver’s mood. This finding aligns with the argument presented in [43].
- ➢
- Weak linear correlation in ∆s1, ∆s2, and ∆s3: The analysis showed a weak linear correlation between ∆s1, ∆s2, ∆s3, and their respective reference radii. This indicates that as the radius of curvature of the crossing trajectory decreased drivers tended to behave more cautiously by slowing down earlier. Essentially, when faced with smaller radii, human drivers tend to exhibit more conservative driving behavior. This also means that drivers are less predictable when navigating through turning regions with small radii. These considerations were stronger in the case of turning maneuvers that took place in the first region. Indeed, Figure 7g shows a lower dispersion of the data and a higher R2 coefficient compared to the behavioral situations described in Figure 7h,i. This confirms that all the correlations found describe more accurately the human behavior in the first approach phase to roundabouts, i.e., in the entry phase.
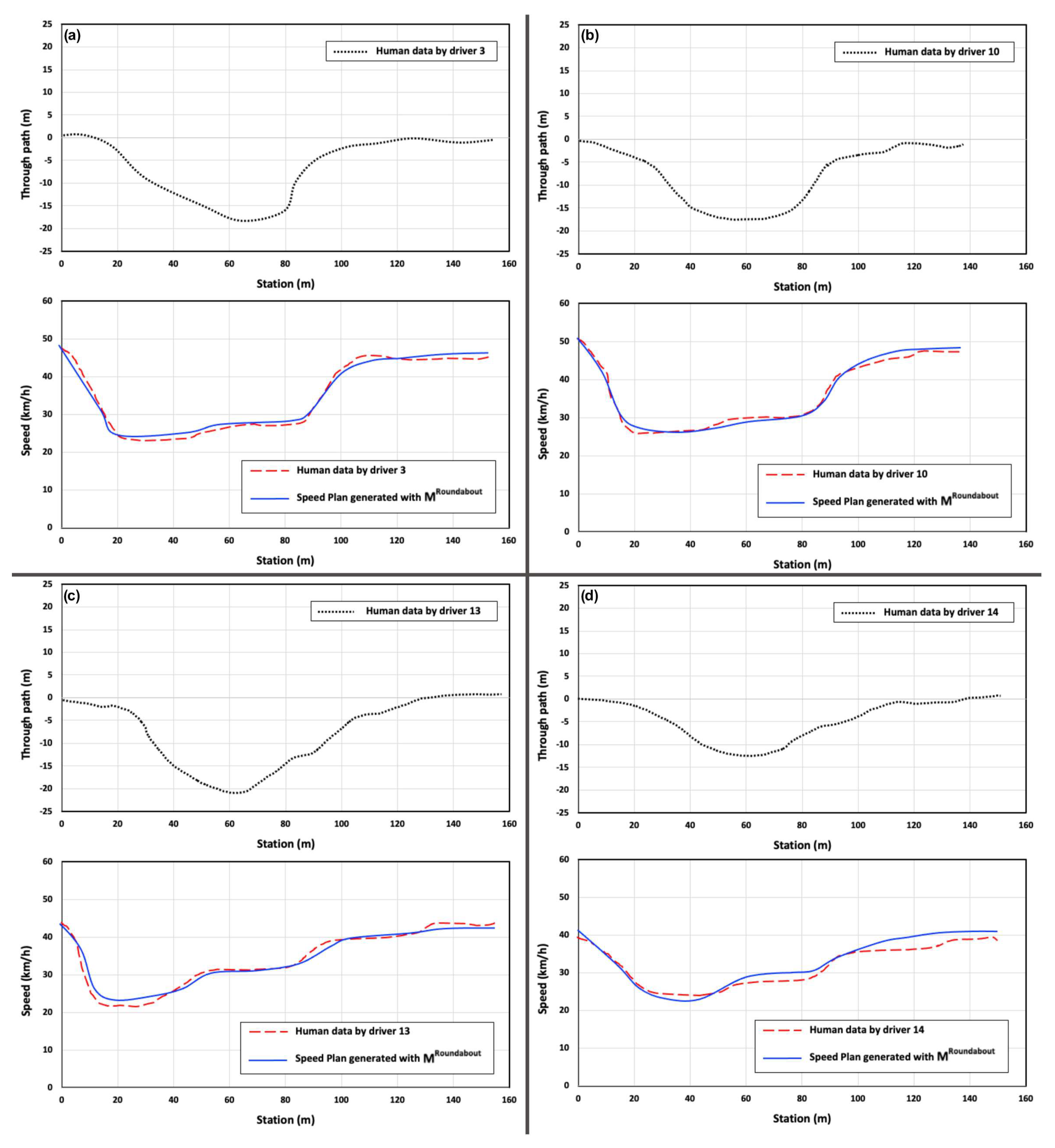
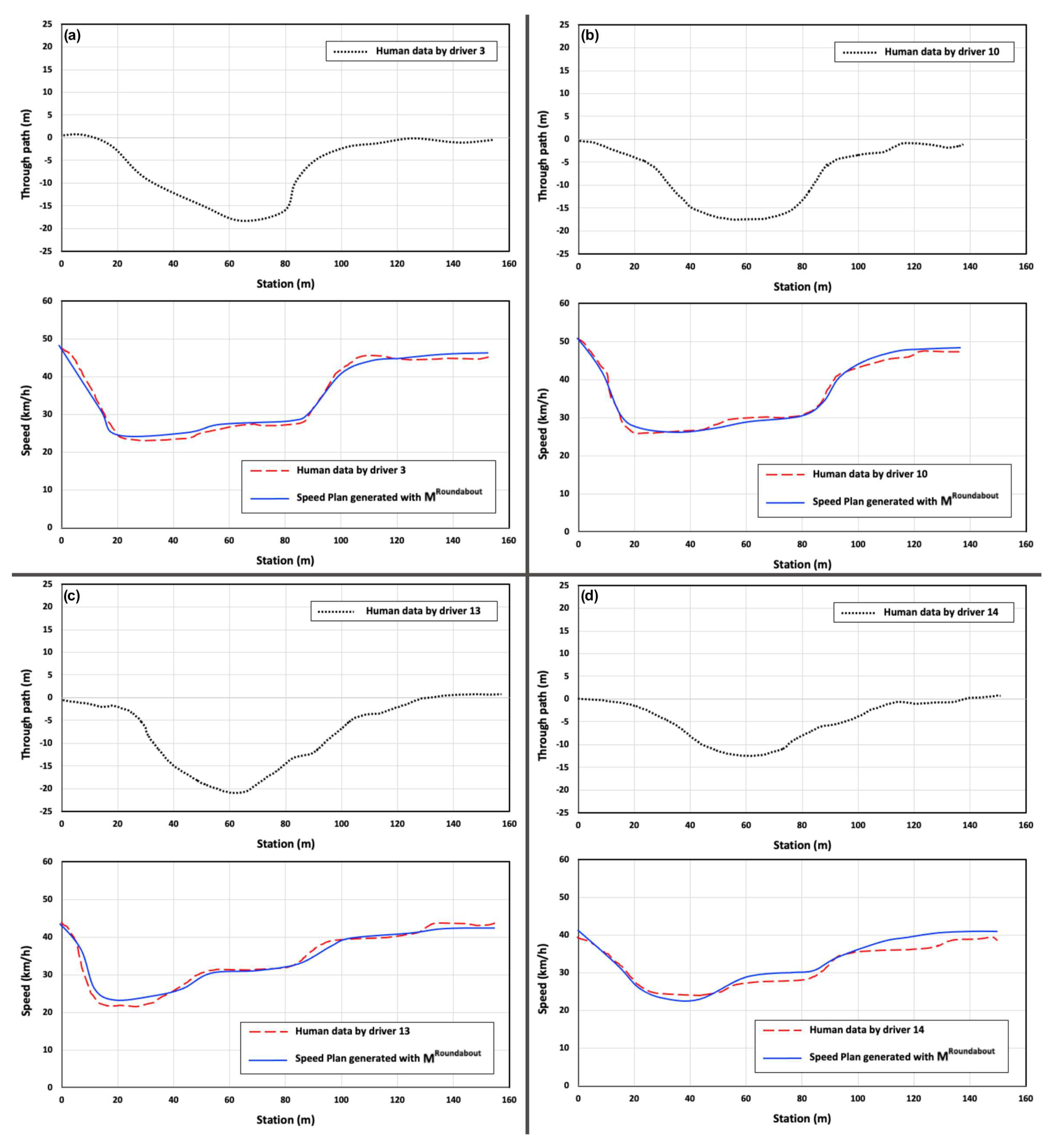
6.2. Speed Model Evaluation and Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ahmed, S.K.; Mohammed, M.G.; Abdulqadir, S.O.; El-Kader, R.G.A.; El-Shall, N.A.; Chandran, D.; Rehman, M.E.U.; Dhama, K. Road traffic accidental injuries and deaths: A neglected global health issue. Health Sci. Rep. 2023, 6, e1240. [Google Scholar] [CrossRef] [PubMed]
- National Highway Traffic Safety Administration (NHTSA). State Traffic Data: Traffic Safety Facts, 2020 Data; DOT HS 813 368. 2022. Available online: https://crashstats.nhtsa.dot.gov/Api/Public/Publication/813368 (accessed on 10 November 2023).
- Istituto Nazionale di Statistica (ISTAT). Incidenti Stradali in Italia. Anno 2022. Report of ISTAT-2023. Roma, Italy. Available online: https://www.istat.it/it/files/2023/07/REPORT_INCIDENTI_STRADALI_2022_IT.pdf (accessed on 10 November 2023). (In Italian).
- Wang, Y.; Hu, J.; Wang, F.; Dong, H.; Yan, Y.; Ren, Y.; Zhou, C.; Yin, G. Tire Road Friction Coefficient Estimation: Review and Research Perspectives. Chin. J. Mech. Eng. 2022, 35, 6–11. [Google Scholar] [CrossRef]
- Tengilimoglu, O.; Carsten, O.; Wadud, Z. Implications of automated vehicles for physical road environment: A comprehensive review. Transp. Res. E Logist. Transp. 2023, 169, 102989. [Google Scholar] [CrossRef]
- Ettinger, S.; Cheng, S.; Caine, B.; Liu, C.; Zhao, H.; Pradhan, S.; Chai, Y.; Sapp, B.; Qi, C.; Zhou, Y.; et al. Large Scale Interactive Motion Forecasting for Autonomous Driving: The Waymo Open Motion Dataset; IEEE: Piscataway, NJ, USA, 2021; pp. 9690–9699. [Google Scholar] [CrossRef]
- Boggs, A.M.; Arvin, R.; Khattak, A.J. Exploring the who, what, when, where, and why of automated vehicle disengagements. Accid. Anal. Prev. 2020, 136, 105406. [Google Scholar] [CrossRef] [PubMed]
- Parkin, J.; Clark, B.; Clayton, W.; Ricci, M.; Parkhurst, G. Understanding Interactions between Autonomous Vehicles and Other Road Users: A Literature Review; Project Report; University of the West of England, Bristol, UK. 2016. Available online: https://uwe-repository.worktribe.com/OutputFile/922231 (accessed on 28 June 2023).
- Xu, D.; Ding, Z.; He, X.; Zhao, H.; Moze, M.; Aioun, F.; Guillemard, F. Learning From Naturalistic Driving Data for Human-Like Autonomous Highway Driving. IEEE Trans. Intell. Transp. Syst. 2020, 7341–7354. [Google Scholar] [CrossRef]
- Grigorescu, S.; Trasnea, B.; Cocias, T.; Macesanu, G. A survey of deep learning techniques for autonomous driving. J. Field Robot. 2020, 37, 362–386. [Google Scholar] [CrossRef]
- Farkas, Z.; Mihály, A.; Gáspár, P. Model Predictive Control Method for Autonomous Vehicles in Roundabouts. Machines 2023, 11, 75. [Google Scholar] [CrossRef]
- Wang, C.; Wang, Y.; Peeta, S. Cooperative Roundabout Control Strategy for Connected and Autonomous Vehicles. Appl. Sci. 2022, 12, 12678. [Google Scholar] [CrossRef]
- Wang, W.; Jiang, L.; Lin, S.; Fang, H.; Meng, Q. Imitation learning based decision-making for autonomous vehicle control at traffic roundabouts. Multimed. Tools Appl. 2022, 81, 39873–39889. [Google Scholar] [CrossRef]
- Cao, H.; Zöldy, M. An Investigation of Autonomous Vehicle Roundabout Situation. Period. Polytech. Transp. Eng. 2019, 48, 236–241. [Google Scholar] [CrossRef]
- Paden, B.; Cap, M.; Yong, S.Z.; Yershov, D.; Frazzoli, E. A Survey of Motion Planning and Control Techniques for Self-Driving Urban Vehicles. IEEE Trans. Intell. Veh. 2016, 1, 33–55. [Google Scholar] [CrossRef]
- Rodrigues, M.; McGordon, A.; Gest, G.; Marco, J. Adaptive Tactical Behaviour Planner for Autonomous Ground Vehicle. In Proceedings of the 2016 UKACC 11th International Conference on Control (CONTROL), Belfast, UK, 31 August–2 September 2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar] [CrossRef]
- Gu, T.; Dolan, J.M. Toward Human-Like Motion Planning in Urban Environments. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium (IV), Dearborn, MI, USA, 8–11 June 2014; IEEE: Piscataway, NJ, USA, 2014. [Google Scholar] [CrossRef]
- Dong, C.; Dolan, J.M.; Litkouhi, B. Interactive ramp merging planning in autonomous driving: Multi-merging leading PGM (MML-PGM). In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar] [CrossRef]
- de Beaucorps, P.; Streubel, T.; Verroust-Blondet, A.; Nashashibi, F.; Bradai, B.; Resende, P. Decision-Making for Automated Vehicles at Intersections Adapting Human-Like Behavior. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar] [CrossRef]
- Rano, I.; Edelbrunner, H.; Schoner, G. Naturalistic Lane-Keeping Based on Human Driver Data. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (IV), Gold Coast City, Australia, 23–26 June 2013; IEEE: Piscataway, NJ, USA, 2013. [Google Scholar] [CrossRef]
- Geng, X.; Liang, H.; Xu, H.; Yu, B.; Zhu, M. Human-Driver Speed Profile Modeling for Autonomous Vehicle’s Velocity Strategy on Curvy Paths. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gotenburg, Sweden, 19–22 August 2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar] [CrossRef]
- Rodrigues, M.; Gest, G.; McGordon, A.; Marco, J. Adaptive Behaviour Selection For autonomous Vehicle through Naturalistic Speed Planning. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar] [CrossRef]
- Fakirah, M.; Leng, S.; Chen, X.; Zhou, J. Visible light communication-based traffic control of autonomous vehicles at multi-lane roundabouts. EURASIP J. Wirel. Commun. Netw. 2020, 2020, 1–14. [Google Scholar] [CrossRef]
- Martin-Gasulla, M.; Elefteriadou, L. Traffic management with autonomous and connected vehicles at single-lane roundabouts. Transp. Res. 2021, 125, 102964. [Google Scholar] [CrossRef]
- Sackmann, M.; Leemann, T.; Bey, H.; Hofmann, U.; Thielecke, J. Multi-Step Training for Predicting Roundabout Traffic Situations. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; IEEE: Piscataway, NJ, USA, 2021. [Google Scholar] [CrossRef]
- Leonardi, S.; Distefano, N.; Pulvirenti, G. Italians’ public opinion on road roundabouts: A web based survey. Transp. Res. Procedia 2020, 45, 293–300. [Google Scholar] [CrossRef]
- Rella Riccardi, M.; Augeri, M.G.; Galante, F.; Mauriello, F.; Nicolosi, V.; Montella, A. Safety Index for evaluation of urban roundabouts. Accid. Anal. Prev. 2022, 178, 106858. [Google Scholar] [CrossRef] [PubMed]
- Distefano, N.; Leonardi, S.; Consoli, F. Drivers’ Preferences for Road Roundabouts: A Study based on Stated Preference Survey in Italy. KSCE J. Civ. Eng. 2019, 23, 4864–4874. [Google Scholar] [CrossRef]
- Ciampa, D.; Diomedi, M.; Giglio, F.; Olita, S.; Petruccelli, U.; Restaino, C. Effectiveness of Unconventional Roundabouts in the Design of Suburban Intersections. Eur. Transp. 2020, 80, 1–16. [Google Scholar] [CrossRef]
- Rodrigues, M.; McGordon, A.; Gest, G.; Marco, J. Autonomous Navigation in Interaction-Based Environments: A Case of Non-Signalized Roundabouts. IEEE Trans. Intell. Veh. 2018, 3, 425–438. [Google Scholar] [CrossRef]
- Wang, W.; Nguyen, Q.A.; Ma, W.; Wei, J.; Hing Chung, P.W.; Meng, Q. Multi-Grid Based Decision Making at Roundabout for Autonomous Vehicles. In Proceedings of the 2019 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Cairo, Egypt, 4–6 September 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar] [CrossRef]
- Medina-Lee, J.F.; Godoy, J.; Artunedo, A.; Villagra, J. Speed Profile Generation Strategy for Efficient Merging of Automated Vehicles on Roundabouts With Realistic Traffic. IEEE Trans. Intell. Veh. 2022, 8, 1–15. [Google Scholar] [CrossRef]
- Deveaux, D.; Higuchi, T.; Ucar, S.; Wang, C.-H.; Harri, J.; Altintas, O. Extraction of Risk Knowledge from Time To Collision Variation in Roundabouts. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; IEEE: Piscataway, NJ, USA, 2021. [Google Scholar] [CrossRef]
- Xu, K.; Cassandras, C.G.; Xiao, W. Decentralized Time and Energy-Optimal Control of Connected and Automated Vehicles in a Roundabout With Safety and Comfort Guarantees. IEEE Trans. Intell. Transp. Syst. 2022, 24, 657–672. [Google Scholar] [CrossRef]
- García Cuenca, L.; Sanchez-Soriano, J.; Puertas, E.; Fernandez Andrés, J.; Aliane, N. Machine Learning Techniques for Undertaking Roundabouts in Autonomous Driving. Sensors 2019, 19, 2386. [Google Scholar] [CrossRef] [PubMed]
- Abnili, M.Z.; Azad, N.L. On-line Situational Awareness for Autonomous Driving at Roundabouts using Artificial Intelligence. J. Mach. Intell. Data Sci. 2021, 2, 17–24. [Google Scholar] [CrossRef]
- Chalaki, B.; Beaver, L.E.; Remer, B.; Jang, K.; Vinitsky, E.; Bayen, A.M.; Malikopoulos, A.A. Zero-Shot Autonomous Vehicle Policy Transfer: From Simulation to Real-World via Adversarial Learning. In Proceedings of the 2020 IEEE 16th International Conference on Control & Automation (ICCA), Singapore, Singapore, 9–11 October 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar] [CrossRef]
- Bosankić, I.; Mehmedović, L.B. Cooperative Intelligence in Roundabout Intersections Using Hierarchical Fuzzy Behavior Calculation of Vehicle Speed Profile. MATEC Web Conf. 2016, 81, 01008. [Google Scholar] [CrossRef]
- Farkas, Z.; Mihály, A.; Gáspár, P. MPC Control Strategy for Autonomous Vehicles Driving in Roundabouts. In Proceedings of the 2022 30th Mediterranean Conference on Control and Automation (MED), Vouliagmeni, Greece, 28 June–1 July 2022; IEEE: Piscataway, NJ, USA, 2022. [Google Scholar] [CrossRef]
- Hidalgo, C.; Lattarulo, R.; Perez, J.; Asua, E. Hybrid trajectory planning approach for roundabout merging scenarios. In Proceedings of the 2019 IEEE International Conference on Connected Vehicles and Expo (ICCVE), Graz, Austria, 4–8 November 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar] [CrossRef]
- Cao, H.; Zoldy, M. MPC Tracking Controller Parameters Impacts in Roundabouts. Mathematics 2021, 9, 1394. [Google Scholar] [CrossRef]
- Crown, R.B.; Guichet, B.; Knudsen, J.; Isebrands, H.; O’Brien, A.; Johnson, M.; Tiesler, C.; Bansen, J.; Lyon, C.; Persaud, B.; et al. Roundabouts—An Informational Guide (2nd Edition): (NCHRP Report 672); Transportation Research Board: 2010. Available online: https://nacto.org/docs/usdg/nchrprpt672.pdf (accessed on 26 June 2023).
- Markelic, I.; Kjaer-Nielsen, A.; Pauwels, K.; Jensen, L.B.W.; Chumerin, N.; Vidugiriene, A.; Tamosiunaite, M.; Rotter, A.; Hulle, M.V.; Kruger, N.; et al. The driving school system: Learning automated basic driving skills from a teacher in a real car. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1135–1146. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Roundabout | Through Path | Number of Legs | Diameter (m) | Circulatory Roadway Width (m) | Entry Width (m) | Exit Width (m) |
|---|---|---|---|---|---|---|
| 1 | Leg A–Leg B | 3 | 40 | 6.70 | 3.70 | 4.10 |
| 2 | Leg C–Leg A | 3 | 30 | 5.50 | 3.40 | 3.70 |
| 3 | Leg B–Leg D | 4 | 40 | 7.50 | 3.70 | 3.90 |
| Leg D–Leg B | 3.60 | 4.50 | ||||
| 4 | Leg B–Leg D | 4 | 35/33 | 7.00 | 4.30 | 4.70 |
| Leg D–Leg B | 4.30 | 4.70 | ||||
| 5 | Leg B–Leg D | 4 | 35 | 8.00 | 4.20 | 5.10 |
| Leg D–Leg B | 4.40 | 6.60 |
| Roundabout | Through Path | Number of Trajectories Acquired | |
|---|---|---|---|
| For Learning | For Evaluation | ||
| 1 | Leg A–Leg B | 15 | 1 |
| 2 | Leg C–Leg A | 15 | 2 |
| 3 | Leg B–Leg D | 15 | 2 |
| Leg D–Leg B | 15 | 1 | |
| 4 | Leg B–Leg D | 15 | 3 |
| Leg D–Leg B | 15 | 1 | |
| 5 | Leg B–Leg D | 15 | 2 |
| Leg D–Leg B | 15 | 3 | |
| Total | 120 | 15 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leonardi, S.; Distefano, N. Roundabout Trajectory Planning: Integrating Human Driving Models for Autonomous Vehicles. Sustainability 2023, 15, 16288. https://doi.org/10.3390/su152316288
Leonardi S, Distefano N. Roundabout Trajectory Planning: Integrating Human Driving Models for Autonomous Vehicles. Sustainability. 2023; 15(23):16288. https://doi.org/10.3390/su152316288
Chicago/Turabian StyleLeonardi, Salvatore, and Natalia Distefano. 2023. "Roundabout Trajectory Planning: Integrating Human Driving Models for Autonomous Vehicles" Sustainability 15, no. 23: 16288. https://doi.org/10.3390/su152316288
APA StyleLeonardi, S., & Distefano, N. (2023). Roundabout Trajectory Planning: Integrating Human Driving Models for Autonomous Vehicles. Sustainability, 15(23), 16288. https://doi.org/10.3390/su152316288