
Dynamic Deformation Monitoring of Offshore Oil Platforms with Integrated GNSS and Accelerometer

Abstract
:1. Introduction
2. Methodology
2.1. CEEMD–Chebyshev Hybrid Filtering
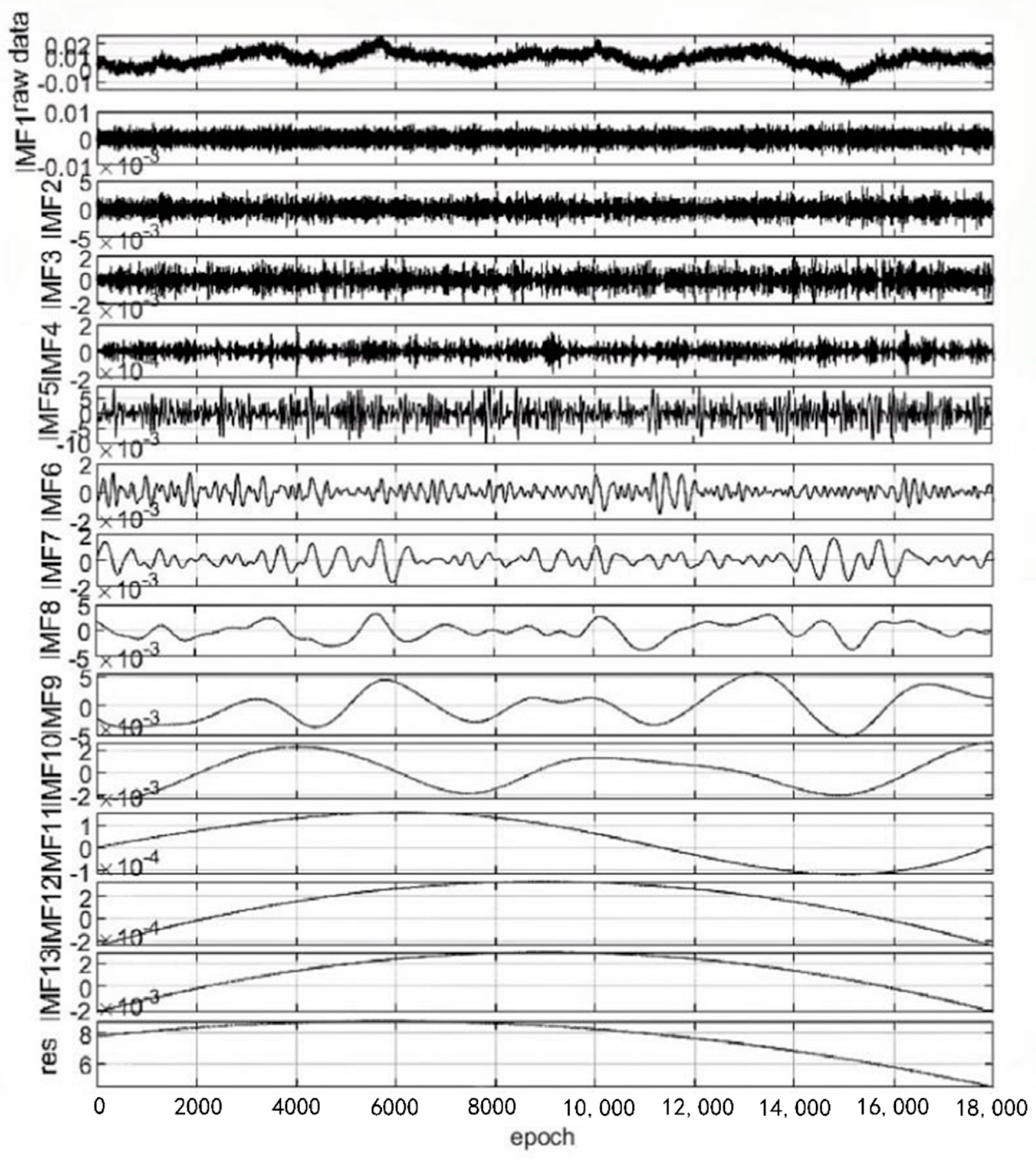
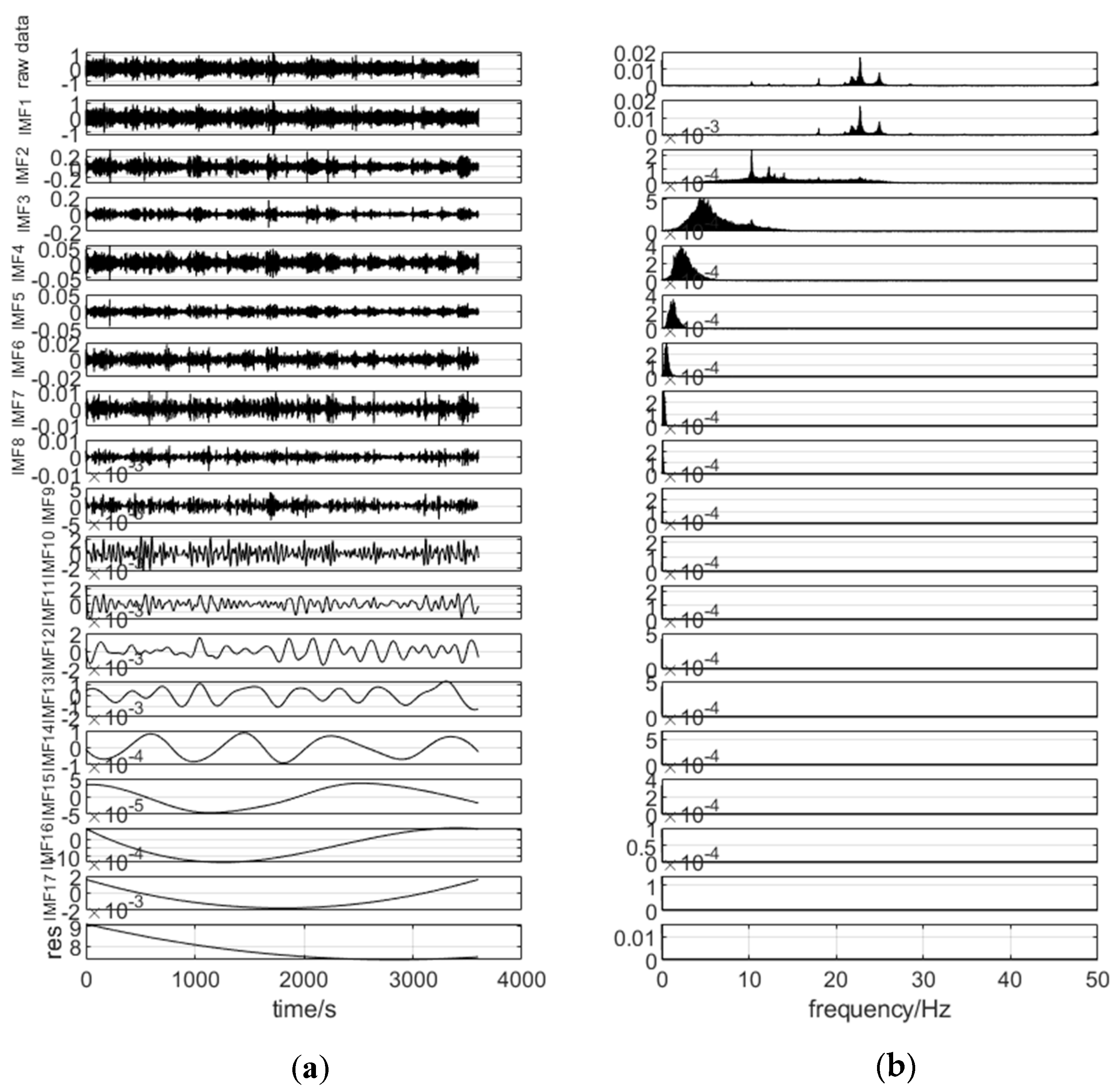
2.1.1. Complementary Ensemble Empirical Mode Decomposition Algorithms
- (1)
- Introduce n sets of complementary and independently and identically distributed white noise N(t) to the original signal F(t), thus obtaining two new sequences A1, A2 with superimposed white noise, the total number of sequences being 2n.
- (2)
- Decompose the obtained sequences A1, and A2 respectively to obtain m IMF components, and denote cij(t) as the jth IMF obtained from the ith decomposition, where i = 1,…, n; j = 1,…, m.
- (3)
- The value of the jth IMF is obtained by averaging cij for each set of IMF components as follows:
- (4)
- The original sequence F(t) eventually decomposes into:where r(t) is the residual trend term.
2.1.2. Chebyshev Filtering
2.2. Frequency Domain Integration
2.3. Overview of Offshore Oil Platforms
3. Results and Discussions
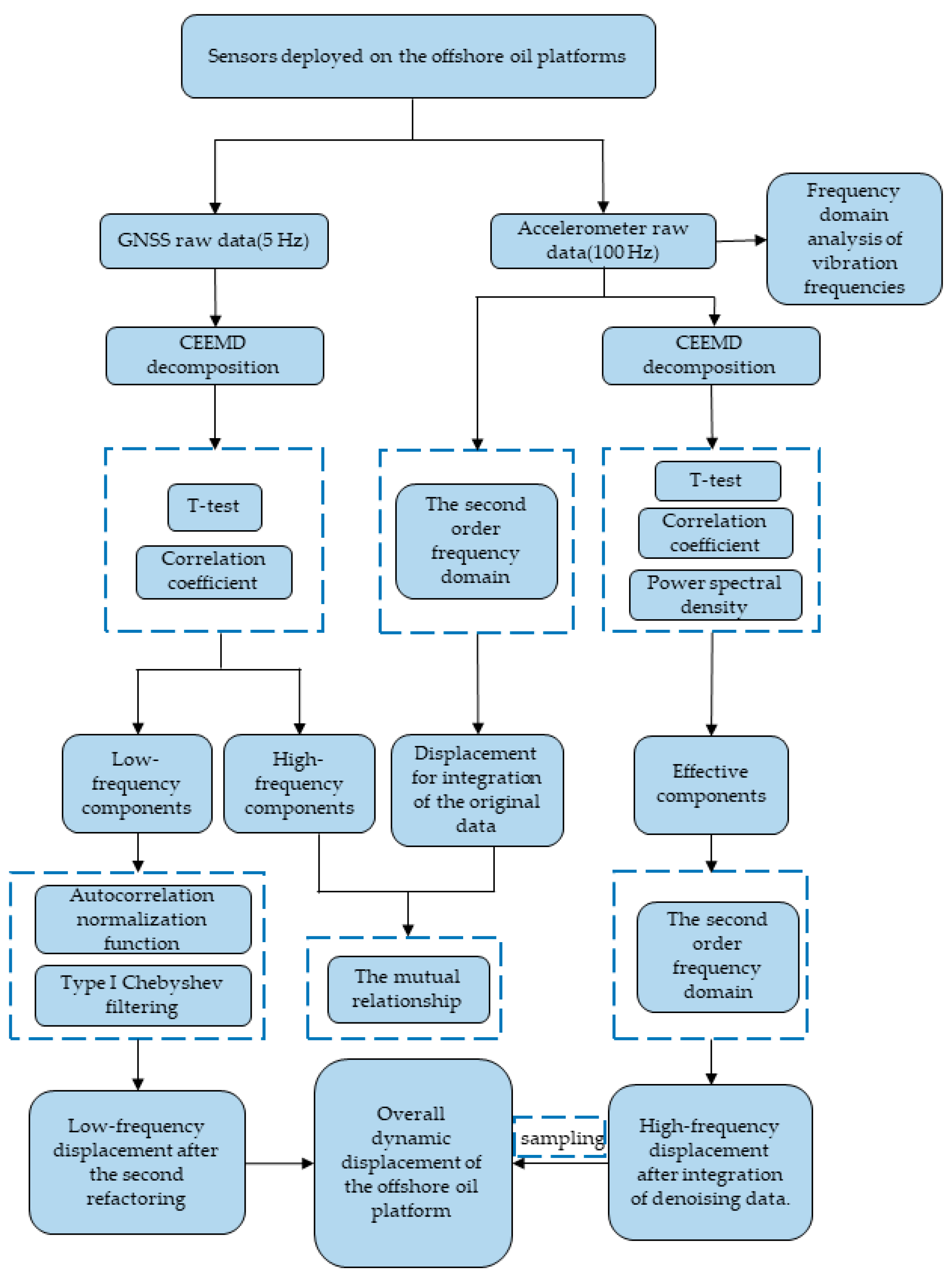
3.1. Overall Displacement Reconfiguration Process
3.2. Data Processing
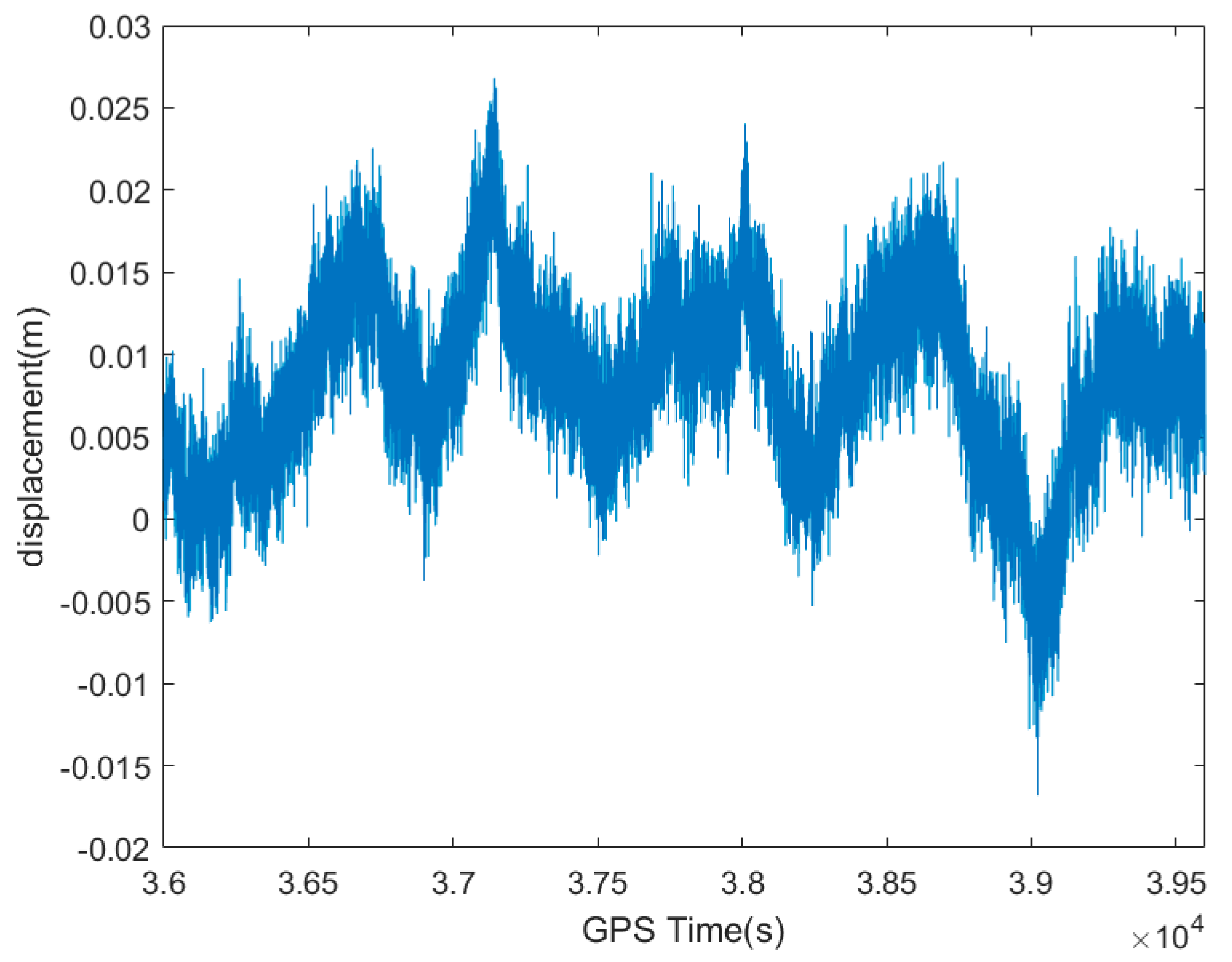
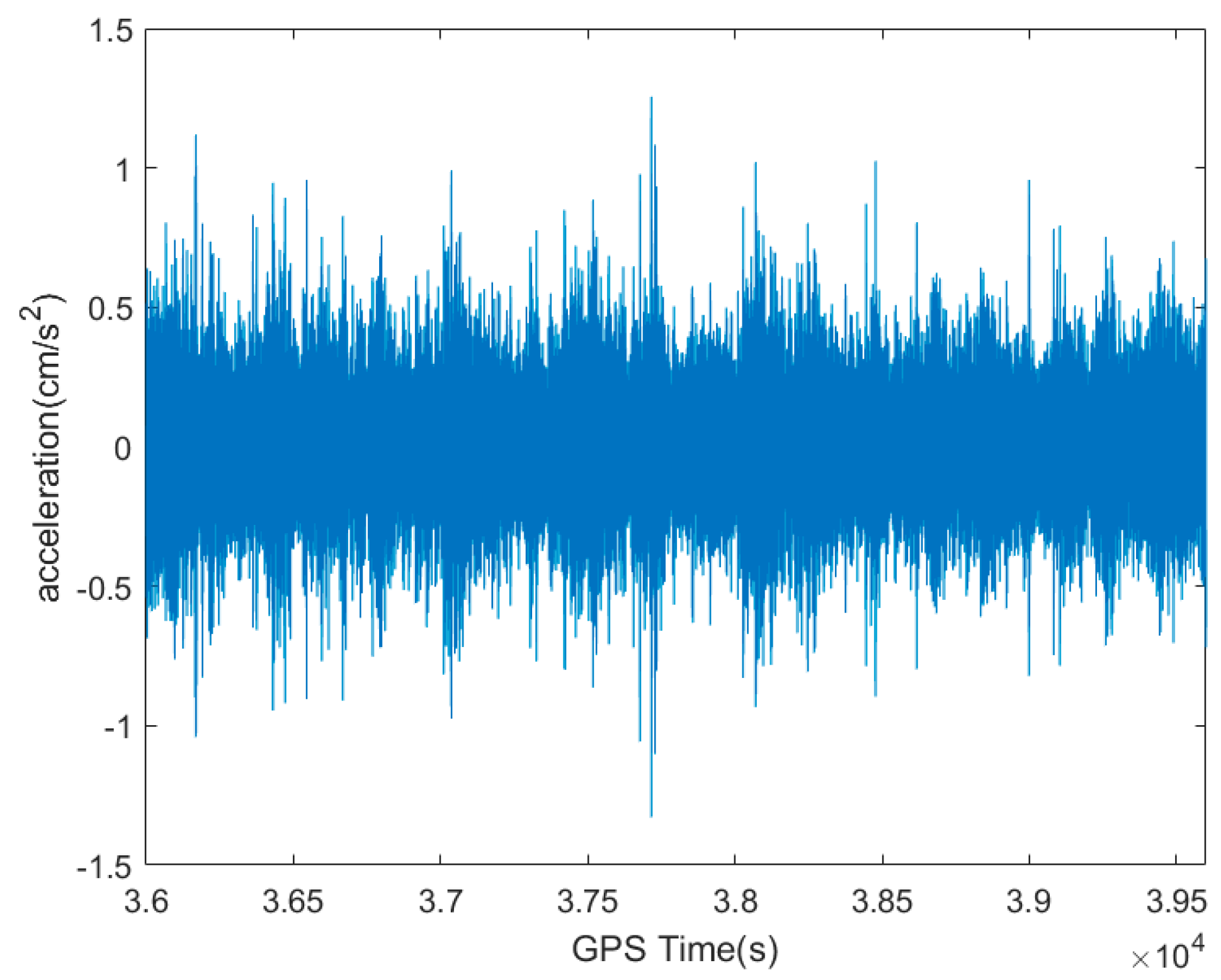
3.2.1. Introduction to the Raw Data
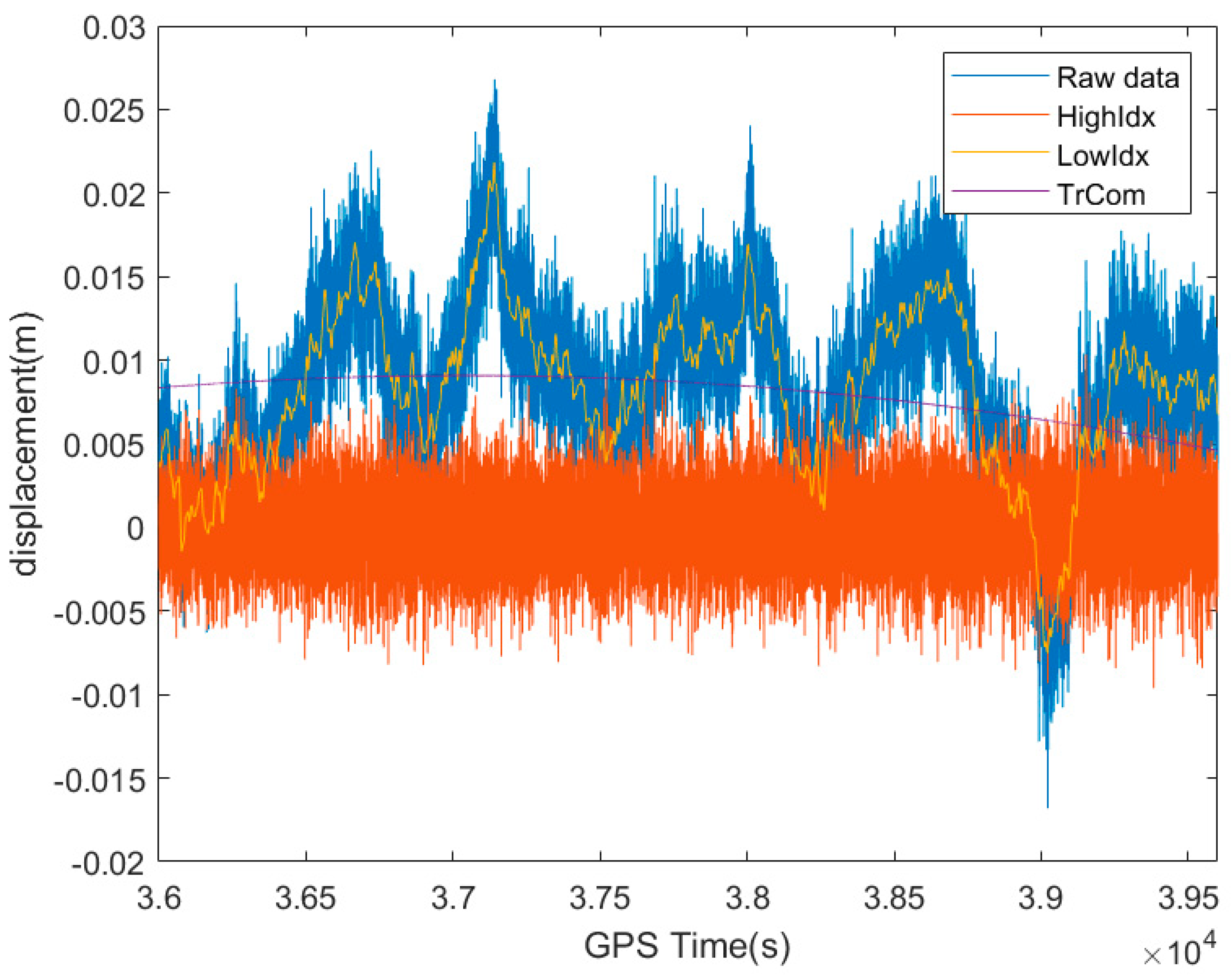
3.2.2. Processing and Analysis of GNSS Data
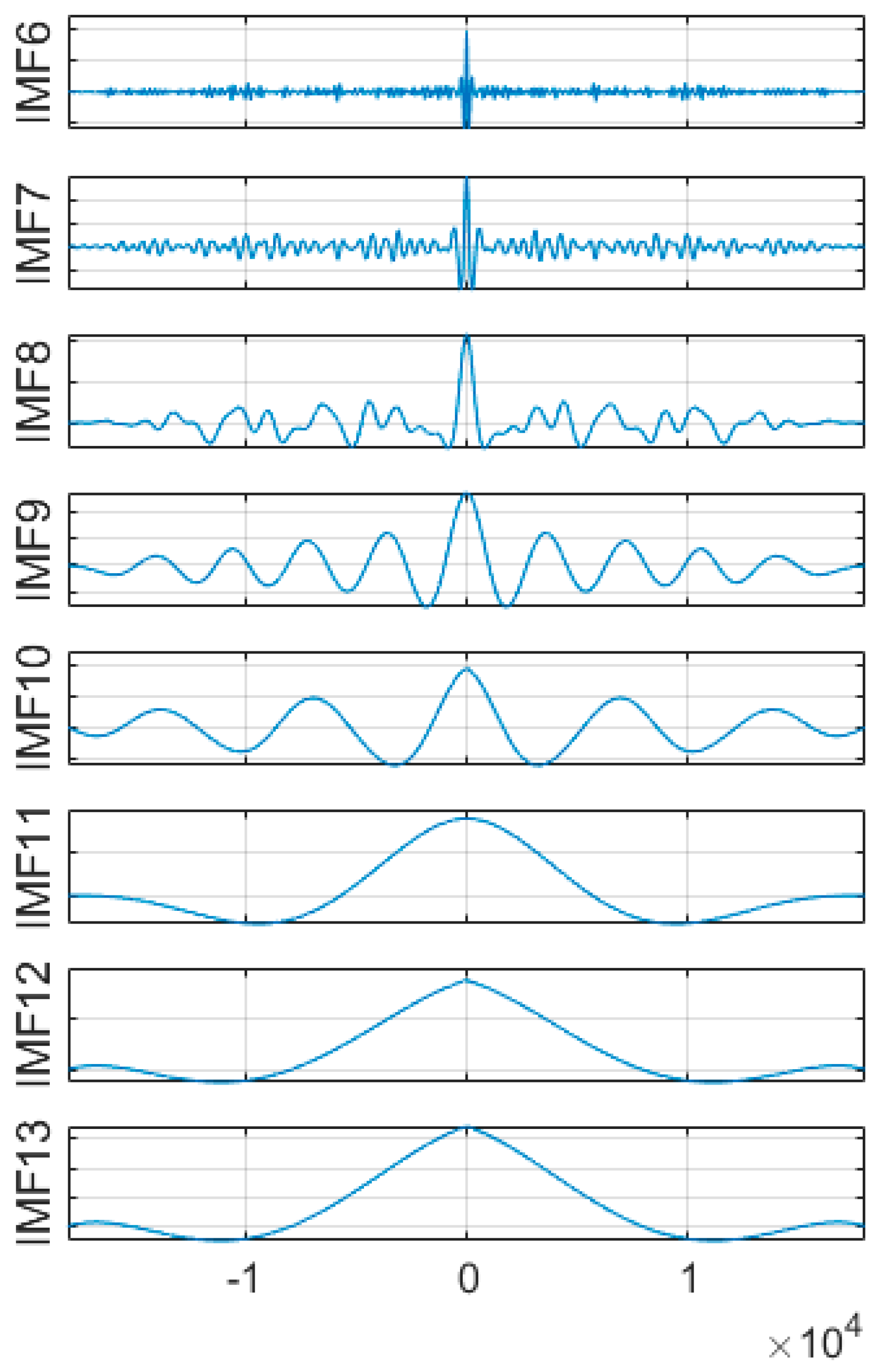
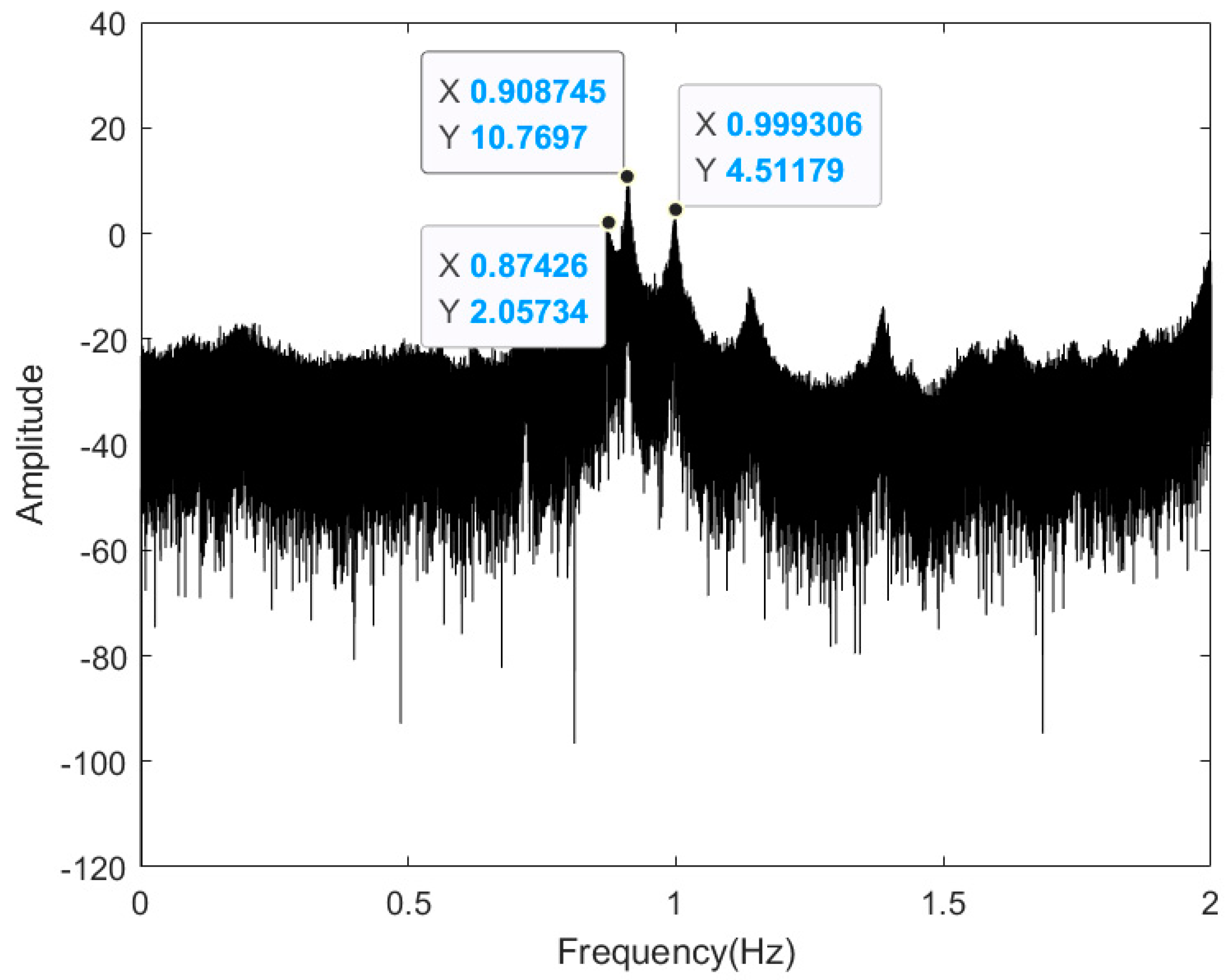
3.2.3. Processing and Analysis of Acceleration Data
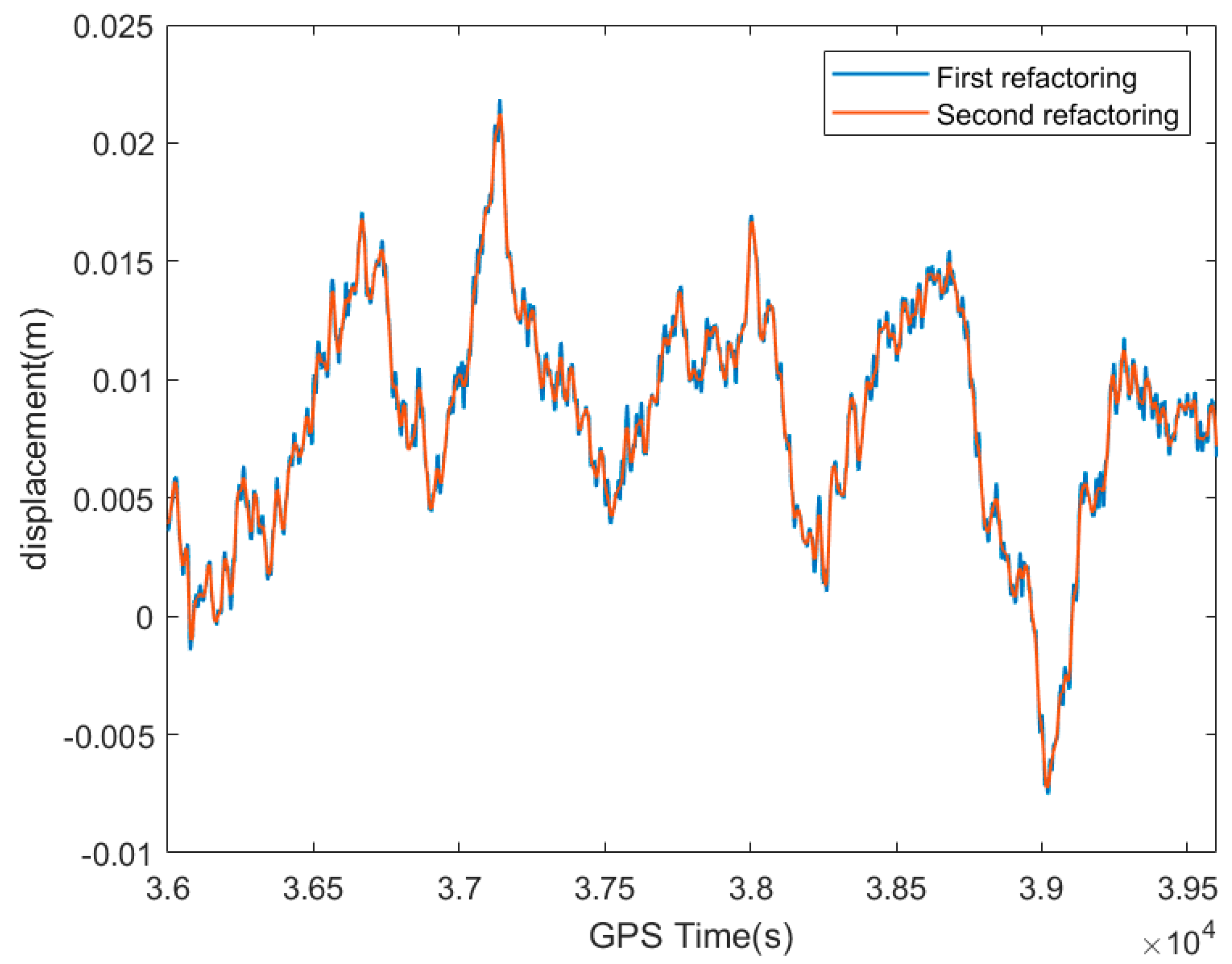
3.2.4. Overall Displacement Reconfiguration
4. Conclusions
- (1)
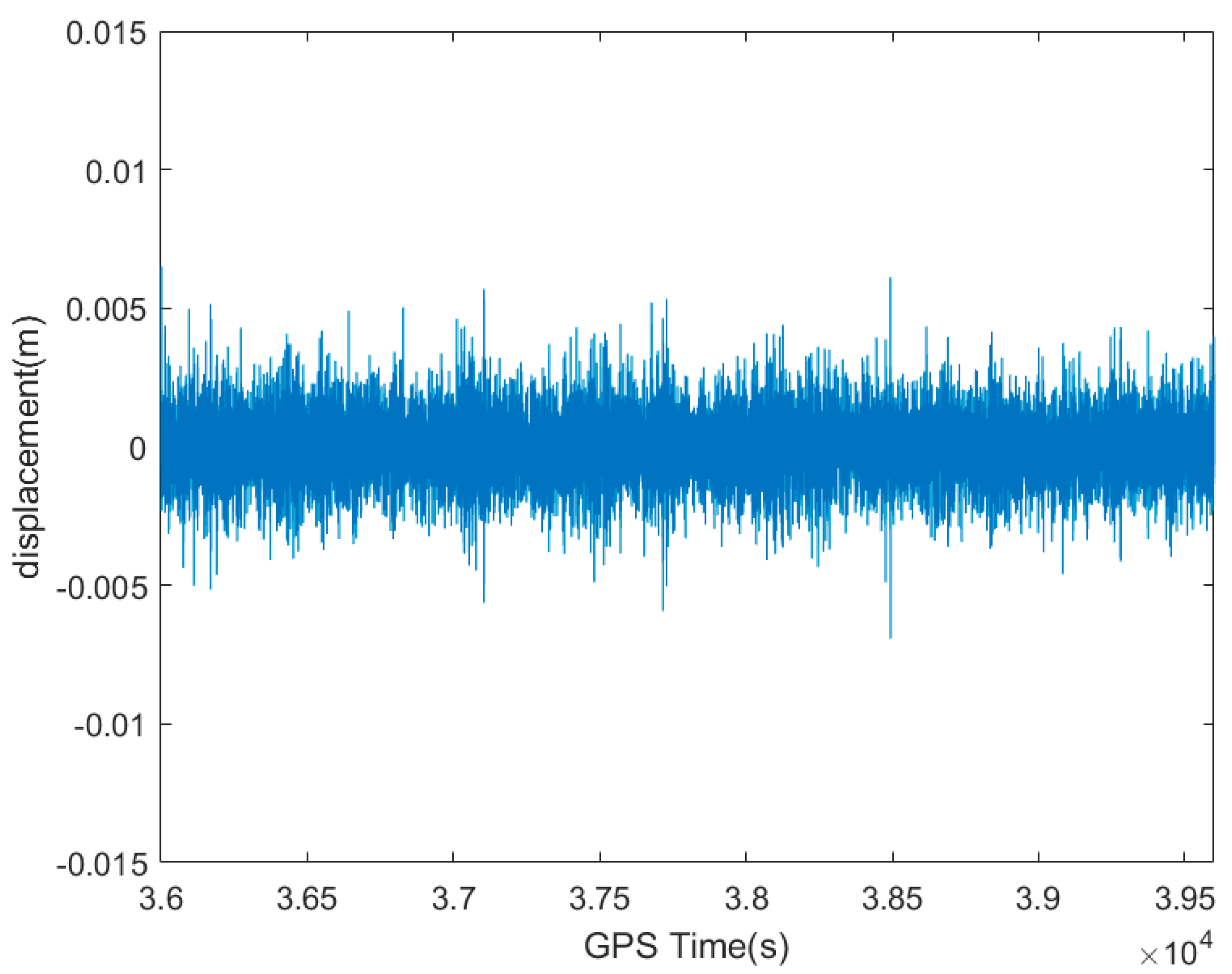
- Based on the selection principles of the t-test and correlation coefficients, the CEEMD–Chebyshev hybrid filter was capable of removing the high-frequency component of the GNSS signal and reducing the noisy part of the low-frequency component, achieving effective extraction of the low-frequency displacement. The maximum displacement amplitude was reduced from 26.79 to 21.22 mm, and the correlation after denoising was 0.8860, with a high degree of correlation.
- (2)
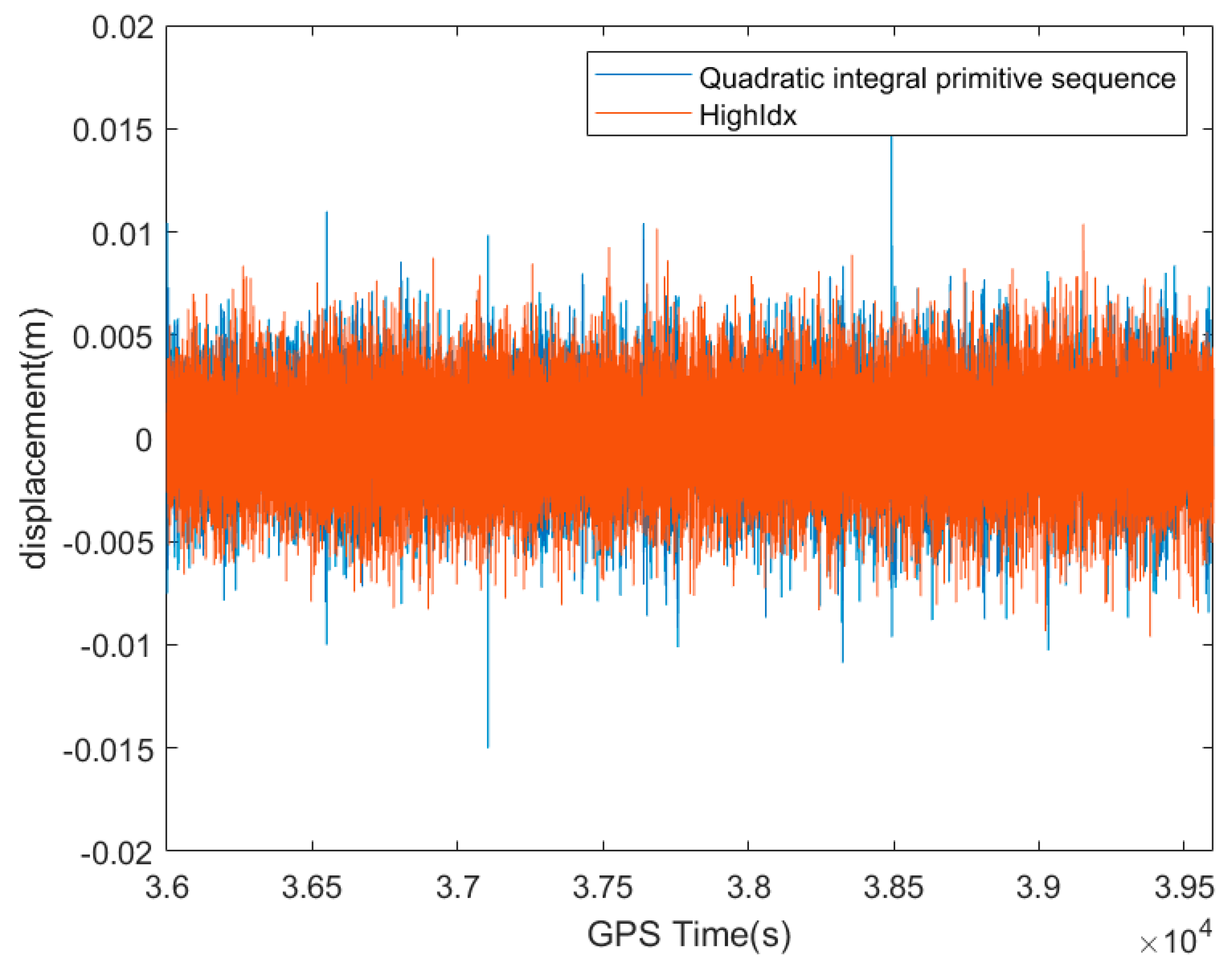
- The integrated displacement of the accelerometer coincided with the high-frequency displacement monitored by GNSS, and the feasibility study indicated that the accelerometer can monitor the high-frequency vibration information of the platform. In addition, the method of frequency domain integration can avoid the influence of the integration trend term to obtain the partial displacement information of the platform.
- (3)
- The hybrid filter was also suitable for the processing of acceleration data when combined with power spectrum identification to filter the appropriate components to reconstruct the acceleration data and frequency domain integration to obtain the high-frequency dynamic displacement of the platform to millimeter precision.
- (4)
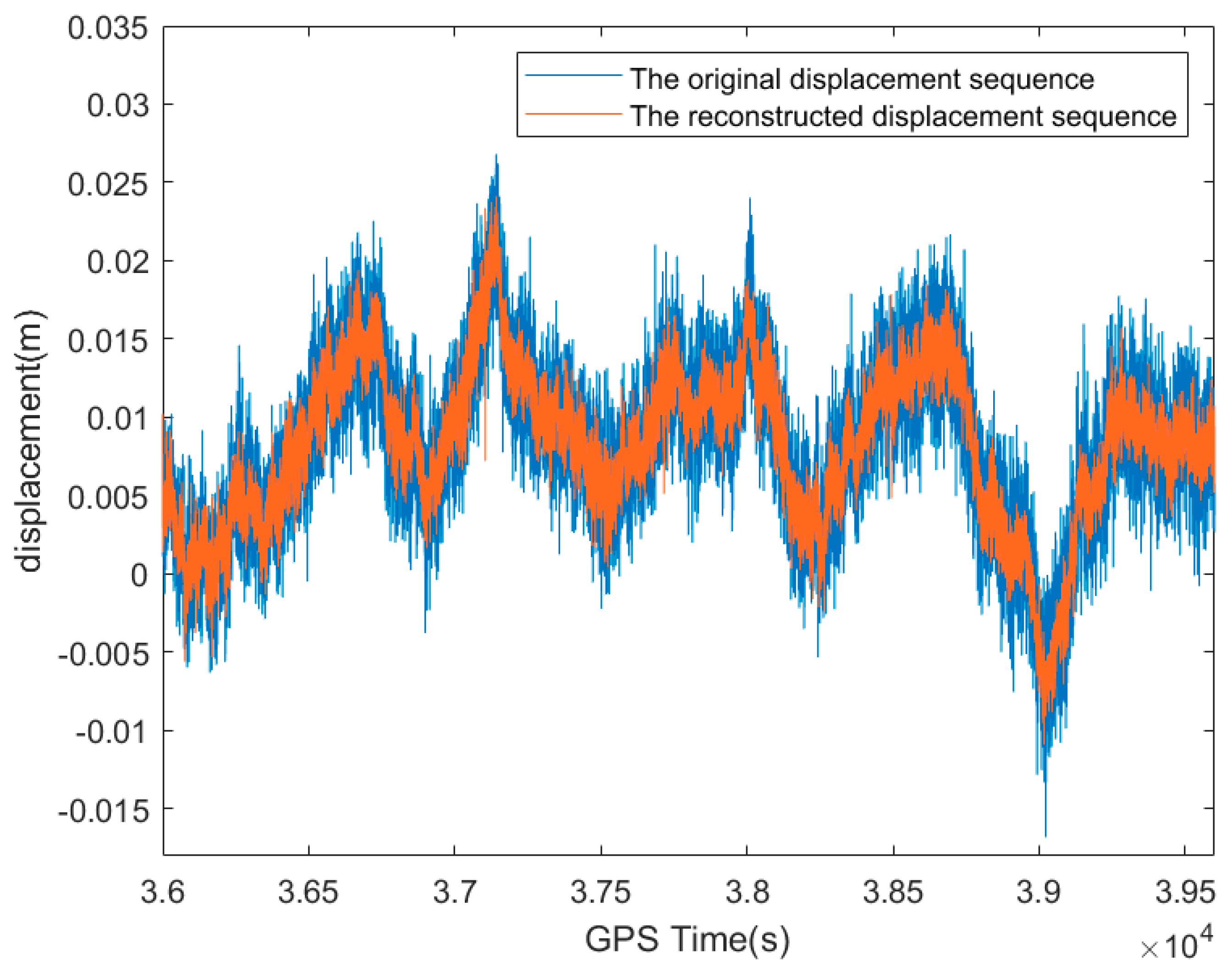
- Integrating low-frequency components from GNSS with high-frequency components from accelerometers yielded the global dynamic displacement. The correlation coefficient with the original GNSS monitoring data was 0.8576, and the signal correlation after denoising and refactoring was greater than 85%, retaining important information components and providing a significant foundation for structural health monitoring of offshore oil platforms. The integrated GNSS and accelerometer monitoring technique has certain practicality and reliability in monitoring the dynamic displacement of offshore oil platforms.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, K.; Zhou, S.S. Safety design analysis for online monitoring of critical equipment failures on offshore oil rigs. Chem. Saf. Environ. 2022, 35, 21–24. [Google Scholar]
- Li, D.; Lyu, B.C.; Wu, W.H.; Li, H. Status and prospect of offshore platform on-site monitoring technology. China Offshore Oil Gas 2022, 34, 165–179. [Google Scholar]
- Sun, L. The Applied Research Based on Wavelet Analysis in Bridge Health Monitoring. Ph.D. Thesis, Chang’an University, Xi’an, China, 2012. [Google Scholar]
- Zhong, P.; Ding, X.L.; Zheng, D.W.; Chen, W.; Xu, Y.L. Filter-based GPS structural vibration monitoring methods and comparison of their performances. Acta Geod. Cartogr. Sin. 2007, 36, 31–36, 42. [Google Scholar]
- Chen, D.Z.; Ye, S.R.; Liu, Y.Y.; Liu, Z. Applied analysis of GPS multipath errors based on observation domain. Geomat. Inf. Sci. Wuhan Univ. 2014, 39, 147–151. [Google Scholar] [CrossRef]
- Qing, C.B. Study on Structural Vibration Frequencies of Bridges Based on GPS and Accelerometer. Master’s Thesis, China University of Mining and Technology, Xuzhou, China, 2016. [Google Scholar]
- Han, H.Z.; Wang, J.; Meng, X.L. Reconstruction of bridge dynamics using integrated GPS and accelerometer. J. China Univ. Min. Technol. 2015, 44, 549–556. [Google Scholar] [CrossRef]
- Roberts, G.W.; Meng, X.L.; Dodson, A.H. Integrating a global positioning system and accelerometers to monitor the deflection of Bridges. J. Surv. Eng. 2004, 130, 65–72. [Google Scholar] [CrossRef]
- Brownjohn, J.; Rizos, C.; Tan, G.H.; Pan, T.C. Real-time long-term monitoring of static and dynamic displacements of an office tower, combining RTK GPS and accelerometer data. J. Beiträge Zum Ausländischen Offentl. Recht Völkerrecht 2004, 118, 3305–3315. [Google Scholar]
- Dai, W.J.; Wu, X.X.; Luo, F.X. Integration of GPS and accelerometer for high building vibration monitoring. J. Vib. Shock 2011, 30, 223–226, 249. [Google Scholar] [CrossRef]
- Yu, J.Y. GNSS and RTS Technologies Based Structural Dynamic Deformation Monitoring of Bridges. Ph.D. Thesis, Hunan University, Changsha, China, 2015. [Google Scholar]
- Li, W.; Wang, J.; Liu, F.; Liu, X. Research on vibration monitoring model of GNSS/accelerometer based on EMD. J. Geod. Geodyn. 2021, 41, 1306–1311. [Google Scholar] [CrossRef]
- Zhang, L.N. Summary of time-frequency analysis method of digital signal processing. Inf. Technol. 2013, 37, 26–28. [Google Scholar] [CrossRef]
- Li, S.M.; Guo, H.D.; Li, D.R. Review of vibration signal processing methods. Chin. J. Sci. Instrum. 2013, 34, 1907–1915. [Google Scholar] [CrossRef]
- Yu, X.; Dong, F.; Ding, E.J.; Wu, S.P.; Fan, C.Y. Rolling bearing fault diagnosis using modified LFDA and EMD with sensitive feature selection. IEEE Access 2018, 6, 3715–3730. [Google Scholar] [CrossRef]
- Xiong, B.; Chen, W.; Zhai, J.S.; Han, L. Dynamic deformation monitoring and the data processing of offshore platform piles based on GNSS RTK technology. Bull. Surv. Mapp. 2019, 102–105. [Google Scholar] [CrossRef]
- Xu, R.; Bai, Y. Study on improved CEEMD–MRSVD denoising method and its application. Aeronaut. Manuf. Technol. 2022, 65, 77–82. [Google Scholar] [CrossRef]
- Wu, Z.S.; Wang, L.X.; Shen, Q.; Li, C.; Li, W.H. Output prediction method of HRG based on CEEMD. Syst. Eng. Electron. 2022, 1–7. Available online: http://kns.cnki.net/kcms/detail/11.2422.TN.20220117.1902.012.html (accessed on 8 August 2022).
- Dai, W.J.; Ding, X.L.; Zhu, J.J.; Chen, Y.Q.; Li, Z.W. EMD filter method and its application in GPS multipath. Acta Geod. Cartogr. Sin. 2006, 321–327. [Google Scholar]
- Zheng, J.D.; Cheng, J.S.; Yang, Y. Modified EEMD algorithm and its applications. J. Vib. Shock 2013, 32, 21–26, 46. [Google Scholar] [CrossRef]
- Chen, R.X.; Tang, B.P.; Ma, J.H. Adaptive de-noising method based on ensemble empirical mode decomposition for vibration signal. J. Vib. Shock 2012, 31, 82–86. [Google Scholar] [CrossRef]
- Wu, X.T.; Yang, M.; Yuan, X.H.; Gong, T.K. Bearing fault diagnosis using EEMD and improved morphological filtering method based on kurtosis criterion. J. Vib. Shock 2015, 34, 38–44. [Google Scholar] [CrossRef]
- Ding, Y.; Xu, D.H.; Cao, L.H.; Guan, X.R. Applicability of the LSTM and ARIMA model in drought prediction based on CEEMD: A case study of Xinjiang. Arid. Zone Res. 2022, 39, 734–744. [Google Scholar] [CrossRef]
- Tian, S.J. Design and Research of X-Band SIW Generalized Chebyshev Super Structure Filter. Master’s Thesis, School of Electronic Science and Engineering, Chengdu, China, 2020. [Google Scholar]
- Liu, X.; Wang, J.; Li, W. A time-frequency extraction model of structural vibration combining VMD and HHT. Geomat. Inf. Sci. Wuhan Univ. 2021, 46, 1686–1692. [Google Scholar] [CrossRef]
- Zhang, X.F. Analysis in Dynamic Deformation of Long Span Bridges Based on RTK-GNSS and Accelerometer Technology. Master’s Thesis, Tianjin University, Tianjin, China, 2019. [Google Scholar] [CrossRef]
- Fang, X.J.; Zu, H.B.; Xiong, Z.Q.; Zhang, K.F.; Gu, H.Y.; Xie, Y.C. Experimental study on flow-induced vibration of multi-span tube bundle with tube support plate. At. Energy Sci. Technol. 2017, 51, 1379–1386. [Google Scholar]
- Wang, Z.Y.; Wu, X.Q.; Wang, X.J.; Zhang, Y.H. Spatio-temporal evolution of mariculture in the Yellow River Delta and its impact on tidal flat wetland resources. J. Agric. Resour. Environ. 2022, 1–16. [Google Scholar] [CrossRef]
- Xiong, C.B.; Chen, W.; Wang, M.; Xiong, A.C.; Han, L.; Yu, L.N. Horizontal displacement monitoring of pile leg structure of offshore platform by RTK-GNSS. J. Tianjin Univ. Sci. Technol. 2021, 54, 781–789. [Google Scholar]
- Qi, S.Z.; Zhao, X.; Tan, X.J. A study on the formation mechanism of Chinese carbon market price based on EEMD model. Wuhan Univ. J. Philos. Soc. Sci. 2015, 68, 56–65. [Google Scholar] [CrossRef]
- Yan, H.N.; Dai, W.J.; Wen, Y.X. A method of processing GNSS displacement time series with t-test and characteristic function. Sci. Surv. Mapp. 2022, 1–9. Available online: http://kns.cnki.net/kcms/detail/11.4415.P.20220713.1845.002.html (accessed on 8 August 2022).
- Zhang, Y.H.; Wang, X.H.; Guo, L.; Zhang, S.H. Partial discharge detection for GIS based on normalized autocorrelation function and similar wavelet soft threshold. High Volt. Appar. 2018, 54, 17–24. [Google Scholar] [CrossRef]
- Wang, Y.R.; Huang, S.X.; Kuang, C.L. Fusion of GNSS and accelerometer monitoring data for dynamic monitoring of high-rise buildings. Bull. Surv. Mapp. 2019, 14–19. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | P1 | Index | P1 |
|---|---|---|---|
| index 1 | 0.6461 | index 8 | 0.0001 |
| index 2 | 0.8844 | index 9 | 2.00 × 10−6 |
| index 3 | 0.8377 | index 10 | 5.94 × 10−16 |
| index 4 | 0.6491 | index 11 | 0 |
| index 5 | 0.9306 | index 12 | 0 |
| index 6 | 0.4012 | index 13 | 0 |
| index 7 | 0.0006 | index 14 | 0 |
| IMF Component | R1 | IMF Component | R1 |
|---|---|---|---|
| IMF1 | 0.3847 | IMF8 | 0.5049 |
| IMF2 | 0.2330 | IMF9 | 0.7003 |
| IMF3 | 0.1598 | IMF10 | 0.4714 |
| IMF4 | 0.1185 | IMF11 | 0.3383 |
| IMF5 | 0.0940 | IMF12 | 0.3470 |
| IMF6 | 0.1339 | IMF13 | 0.3446 |
| IMF7 | 0.2764 | IMF14 | 0.2485 |
| Index | P2 | Index | P2 |
|---|---|---|---|
| index 1 | 0.8528 | index 10 | 0.0009 |
| index 2 | 0.9599 | index 11 | 1.03 × 10−77 |
| index 3 | 0.8528 | index 12 | 1.29 × 10−6 |
| index 4 | 0.9364 | index 13 | 1.81 × 10−72 |
| index 5 | 0.9196 | index 14 | 0.0002 |
| index 6 | 0.7604 | index 15 | 3.14 × 10−6 |
| index 7 | 0.7089 | index 16 | 0 |
| index 8 | 0.2409 | index 17 | 0 |
| index 9 | 0.0001 | index 18 | 0 |
| IMF Component | R2 | IMF Component | R2 |
|---|---|---|---|
| IMF1 | 0.7790 | IMF10 | 0.0018 |
| IMF2 | 0.4726 | IMF11 | 0.0019 |
| IMF3 | 0.3157 | IMF12 | 0.0015 |
| IMF4 | 0.2461 | IMF13 | 0.0010 |
| IMF5 | 0.1775 | IMF14 | 0.0012 |
| IMF6 | 0.2029 | IMF15 | 0.0013 |
| IMF7 | 0.1639 | IMF16 | 0.0011 |
| IMF8 | 0.0844 | IMF17 | 0.0021 |
| IMF9 | 0.0032 | IMF18 | 0.0022 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, S.; Xu, C.; Mi, J.; Gu, S. Dynamic Deformation Monitoring of Offshore Oil Platforms with Integrated GNSS and Accelerometer. Sustainability 2022, 14, 10521. https://doi.org/10.3390/su141710521
Yang S, Xu C, Mi J, Gu S. Dynamic Deformation Monitoring of Offshore Oil Platforms with Integrated GNSS and Accelerometer. Sustainability. 2022; 14(17):10521. https://doi.org/10.3390/su141710521
Chicago/Turabian StyleYang, Songliangzi, Changhui Xu, Jinzhong Mi, and Shouzhou Gu. 2022. "Dynamic Deformation Monitoring of Offshore Oil Platforms with Integrated GNSS and Accelerometer" Sustainability 14, no. 17: 10521. https://doi.org/10.3390/su141710521
APA StyleYang, S., Xu, C., Mi, J., & Gu, S. (2022). Dynamic Deformation Monitoring of Offshore Oil Platforms with Integrated GNSS and Accelerometer. Sustainability, 14(17), 10521. https://doi.org/10.3390/su141710521