Analysis of the Wind System Operation in the Optimal Energetic Area at Variable Wind Speed over Time

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- -
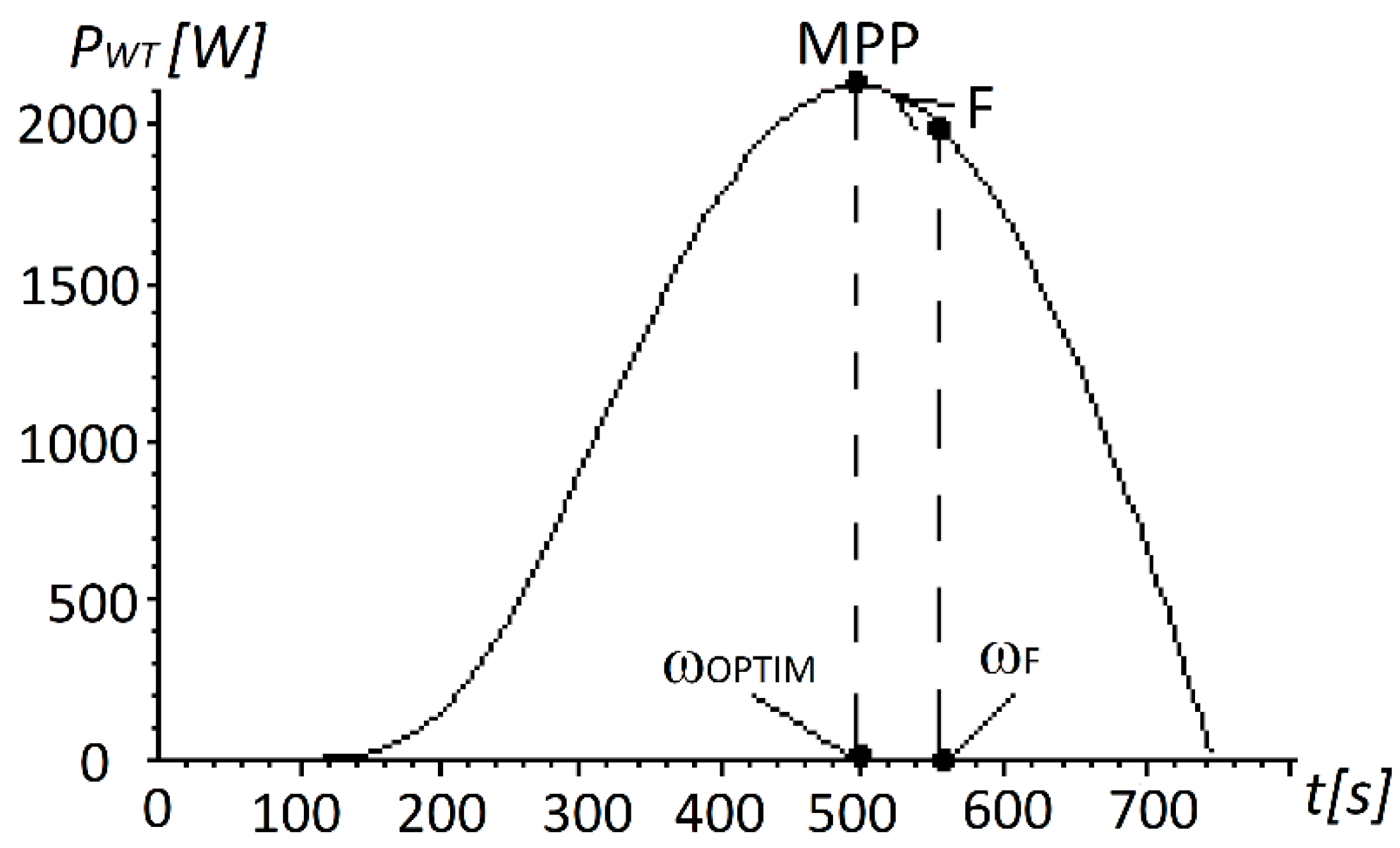
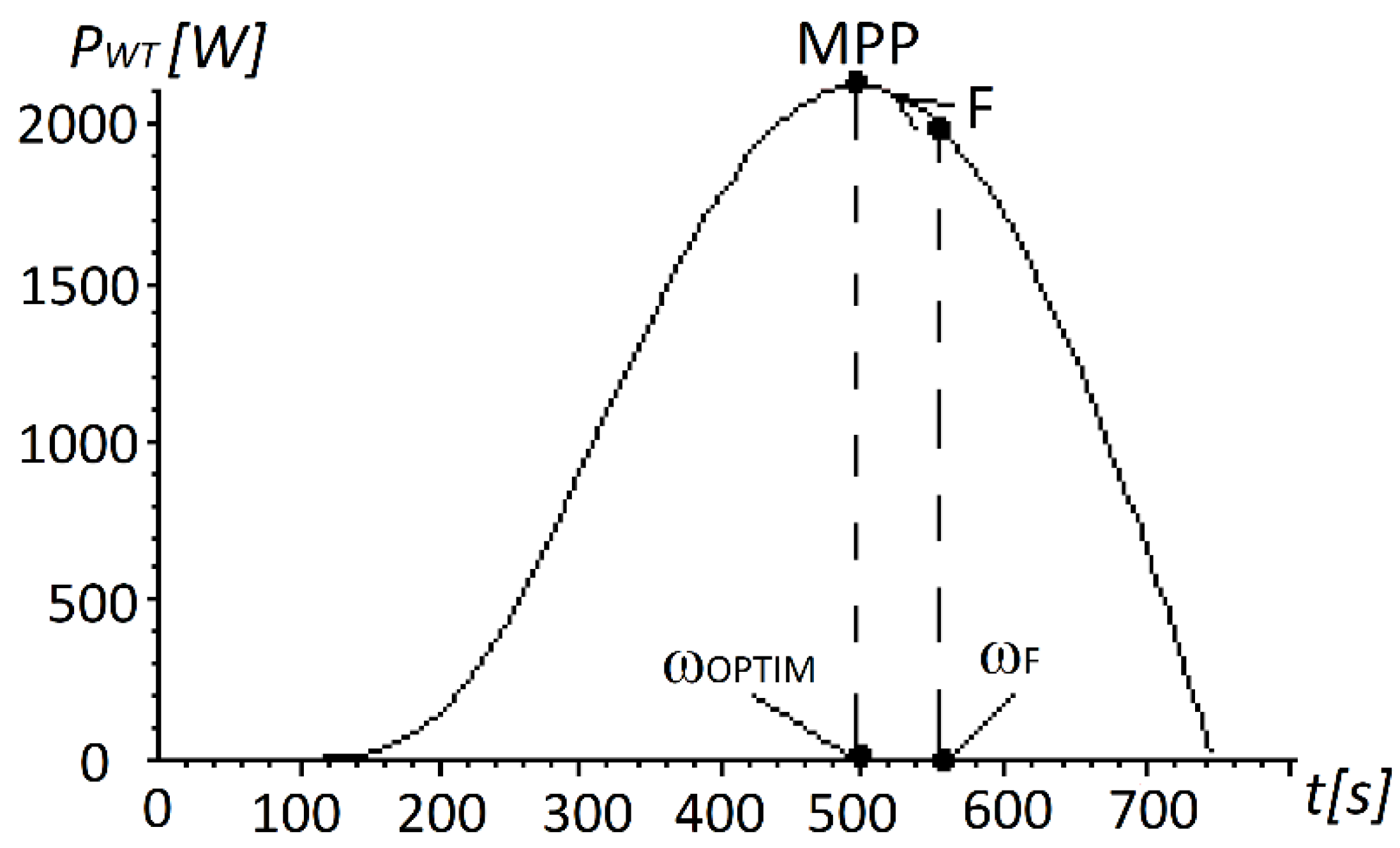
- maximum power point—MPP–with MAV—ωOPTIM; and,
- -
- null power point with maximum MAV—ωMAX.
2. Mathematical Models
2.1. The Mathematical Model of WT, (MM-WT)
2.2. The GSMP Mathematical Model, (MM-GSMP)
- U—stator voltage;
- Id, Iq—d-axis and q-axis stator currents;
- θ—load angle;
- R1—phase resistance of the generator;
- Ld—synchronous reactance after d axis;
- Lq—synchronous reactance after q axis;
- ΨPM—flux permanent magnet;
- MPMSG—PMSG electromagnetic torque; and,
3. Simulation Results at the Time Variable Wind Speed
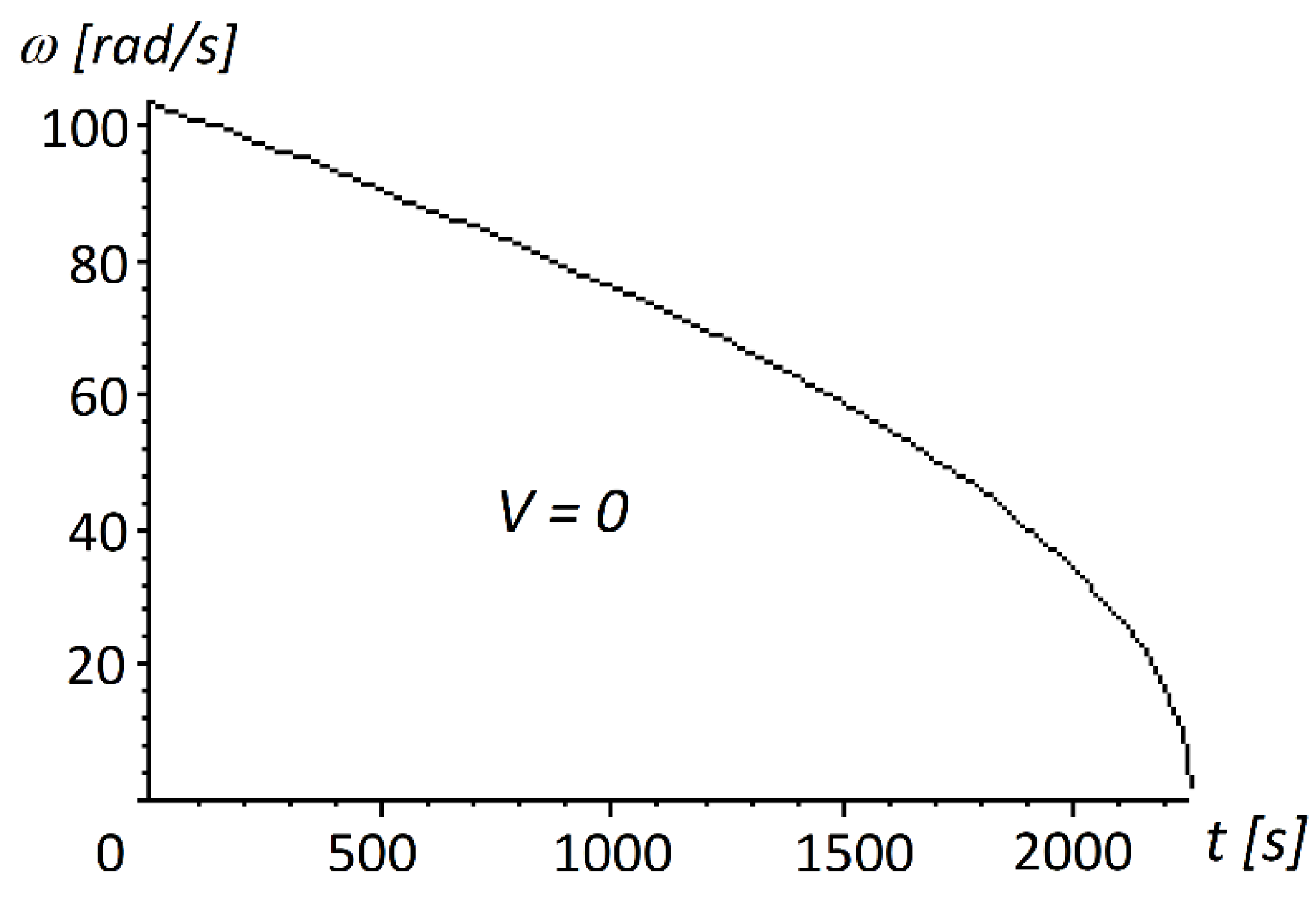
3.1. No-Load Operation of See
3.2. No-Load Operation of WTAUX
3.3. Load Operation of the EES
- (1)
- The estimated value of captured wind energy is based on the use of MM-WT, which is valid only under certain conditions, usually different from the operating conditions.
- (2)
- When calculating the integrity of the WT power, it is necessary to know the time variation of MAV, which is not known in advance. This can only be known later by solving the motion equation or by direct measurements. We can determine the maximum power of the TV corresponding to the wind speed at that time using the relationship:
- (1)
- measure the current MAV value, ωtk, for the PMSG and maximum MAV, ωMAX-tk, from WTAUX;
- (2)
- measure the power at PMSG at the operating point P and obtain the power value at WT, PWT-P; and,
- (3)
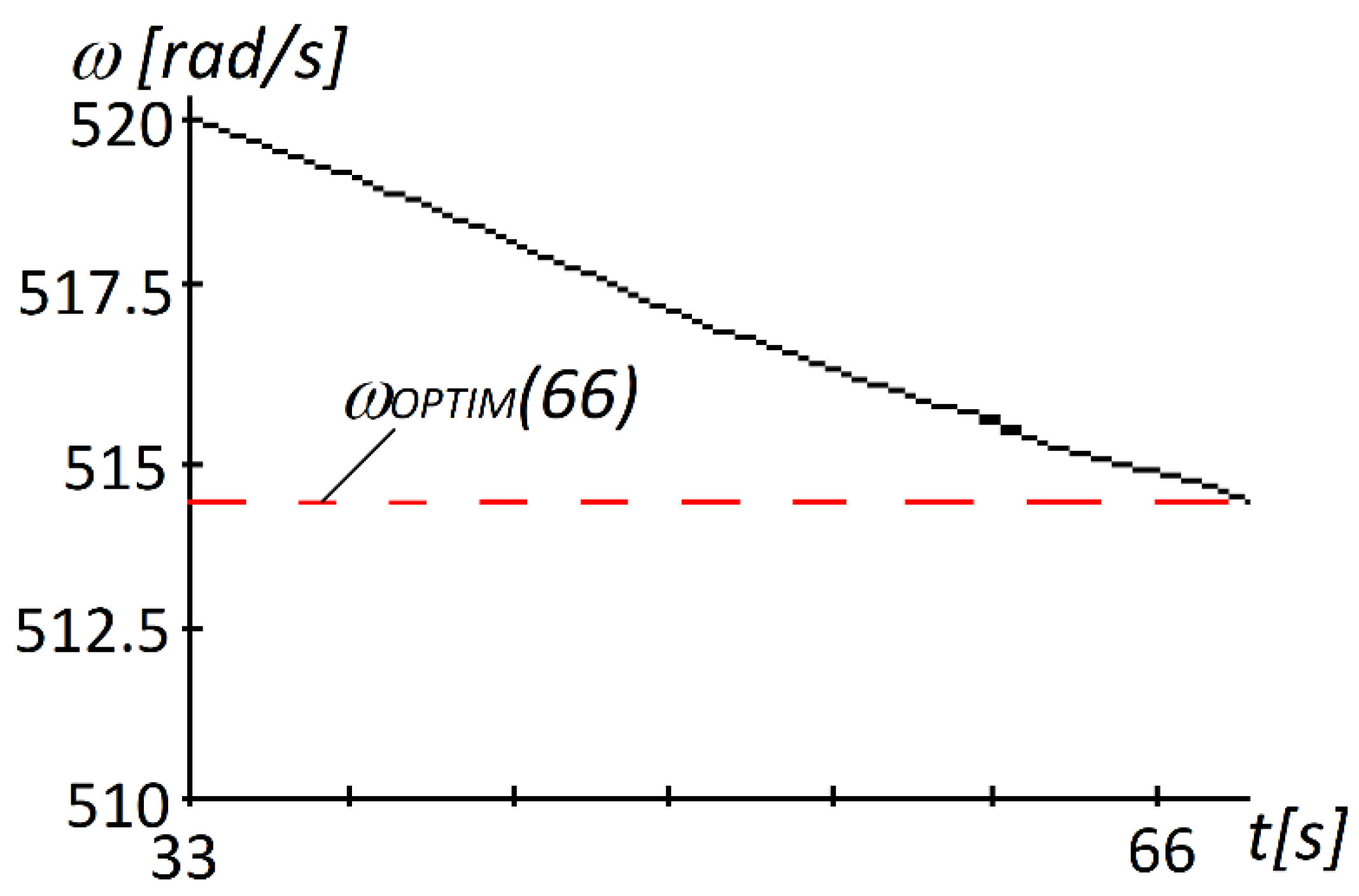
- MPP coordinates at power WT, optimum MAV, ωOPTIM-tk, and maximum power, PWT-MAX, are obtained from ωMAX-tk using the relations:
- (4)
- With the measured MAV, ωtk, measured and ωOPTIM-tk values, the kinetics energy variations are obtained, over time intervals Δt, in the following form:
- (5)
- Calculate the value of the wind energy taken over by the WT, in the time interval Δt, knowing the value of the WT power at the operating point P and the maximum power, PWT-MAX:
- (6)
- Calculate the energy value, WG-REQUIRED, which the generator should debit in the time interval Δt, to reach the optimum MAV, ωOPTIM-tk, in the time interval Δt:
- (7)
- The prescribed power value at the generator to reach the optimal MAV, ωOPTIM-tk, in the time interval Δt, is calculated from the energy value, WG-REQUIRED, as:
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Masukume, P.; Makaka, G.; Mukumba, P. Optimization of the Power Output of a Bare Wind Turbine by the Use of a Plain Conical Diffuser. Sustainability 2018, 10, 2647. [Google Scholar] [CrossRef]
- Aslam, S.; Javaid, N.; Khan, F.; Alamri, A.; Almogren, A.; Abdul, W. Towards Efficient Energy Management and Power Trading in a Residential Area via Integrating a Grid-Connected Microgrid. Sustainability 2018, 10, 1245. [Google Scholar] [CrossRef]
- Wang, B.; Wu, Q.; Tian, M.; Hu, Q. Distributed Coordinated Control of Offshore Doubly Fed Wind Turbine Groups Based on the Hamiltonian Energy Method. Sustainability 2017, 9, 1448. [Google Scholar] [CrossRef]
- Maleki, A.; Rosen, M.; Pourfayaz, F. Optimal Operation of a Grid-Connected Hybrid Renewable Energy System for Residential Applications. Sustainability 2017, 9, 1314. [Google Scholar] [CrossRef]
- Babescu, M.; Borlea, I.; Jigoria-Oprea, D. Fundamental aspects concerning Wind Power System Operation Part.1, Matematical Models. In Proceedings of the IEEE Melecon, Medina, Tunisia, 25–28 March 2012. [Google Scholar]
- Babescu, M.; Borlea, I.; Jigoria-Oprea, D. Fundamental aspects concerning Wind Power System Operation Part.2, Case Study. In Proceedings of the IEEE Melecon, Medina, Tunisia, 25–28 March 2012. [Google Scholar]
- Akpinar, S.; Akpinar, E.K. Wind energy analysis based on maximum entropy principle (MEP) - type distribution function. Energ. Convers. Manag. 2007, 48, 1140–1149. [Google Scholar] [CrossRef]
- Adaramola, M.S.; Krogstad, P.A. Experimental investigation of wake effects on wind turbine performance. Renew. Energ. 2011, 36, 2078–2086. [Google Scholar] [CrossRef]
- Akpinar, S.; Akpinar, E.K. Estimation of wind energy potential using finite mixture distribution models. Energ. Convers. Manag. 2009, 50, 877–884. [Google Scholar] [CrossRef]
- Celik, A.N. Energy output estimation for small-scale wind power generators using Weibull-representative wind data. J. Wind. Eng. Ind. Aerod. 2003, 91, 693. [Google Scholar] [CrossRef]
- Celik, A.N. Weibull representative compressed wind speed data for energy and performance calculations of wind energy systems. Energ. Convers. Manag. 2003, 44, 3057–3072. [Google Scholar] [CrossRef]
- Balog, F.; Ciocârlie, H.; Erdodi, G.; Petrescu, D. Peak Energy Determination by a Sample at Idle Mode Operation. In Proceedings of the IEEE—International Symposion on applied Computational intelligence and informatics-SACI Polytechnic University, Timişoara, Romania, 15–17 May 2014. [Google Scholar]
- Celik, A.N.; Kolhe, M. Generalized feed-forward based method for wind energy prediction. Appl. Energ. 2013, 101, 582–588. [Google Scholar] [CrossRef]
- Babescu, M.; Gana, O.; Clotea, L. Fundamental Problems related to the Control of Wind Energy Conversion Systems-Maximum Power Extraction and Smoothing the Power Fluctuations delivers to the Grid. In Proceedings of the 13th International Conference on Optimization of Electrical and Electronic Equipment, Brasov, Romania, 24–26 May 2012. [Google Scholar]
- Balog, F.; Ciocârlie, H.; Babescu, M.; Erdodi, G.-M. Equivalent speed and equivalent power of the wind systems that works at variable wind speed. In Proceedings of the SOFA, Timişoara, România, 24–26 July 2014. [Google Scholar]
- Musuroi, S.; Sorandaru, C.; Erdodi, G.-M.; Petrescu, D.-I. Wind System with Storage in Electrical Accumulators. In Proceedings of the 9th International Symposium on Advanced Topics in Electrical Engineering, Bucharest, Romania, 7–9 May 2015. [Google Scholar]
- Sorandaru, C.; Musuroi, S.; Ancuti, M.-C.; Erdodi, G.-M.; Petrescu, D.-I. The Control of the Wind Power Systems by Imposing the DC Current. In Proceedings of the 10th Jubilee IEEE International Symposium on Applied Computational Intelligence and Informatics, Timisoara, Romania, 21–23 May 2015; pp. 259–264, ISBN 978-1-4799-9910-1. WOS:0003 80397800048. [Google Scholar]
- Sorandaru, C.; Musuroi, S.; Ancuti, M.-C.; Erdodi, G.-M.; Petrescu, D.-I. Equivalent power for a wind power system. In Proceedings of the IEEE 11th International Symposium on Applied Computational Intelligence and Informatics (SACI), Timisoara, Romania, 12–14 May 2016; pp. 225–228. [Google Scholar]
- Erdodi, G.-M.; Petrescu, D.-I.; Sorandaru, C.; Musuroi, S. The determination of the maximum energetic zones for a wind system, operating at variable wind speeds. In Proceedings of the 18th International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 17–19 October 2014; pp. 256–261. [Google Scholar]


© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sorandaru, C.; Musuroi, S.; Frigura-Iliasa, F.M.; Vatau, D.; Dordescu, M. Analysis of the Wind System Operation in the Optimal Energetic Area at Variable Wind Speed over Time. Sustainability 2019, 11, 1249. https://doi.org/10.3390/su11051249
Sorandaru C, Musuroi S, Frigura-Iliasa FM, Vatau D, Dordescu M. Analysis of the Wind System Operation in the Optimal Energetic Area at Variable Wind Speed over Time. Sustainability. 2019; 11(5):1249. https://doi.org/10.3390/su11051249
Chicago/Turabian StyleSorandaru, Ciprian, Sorin Musuroi, Flaviu Mihai Frigura-Iliasa, Doru Vatau, and Marian Dordescu. 2019. "Analysis of the Wind System Operation in the Optimal Energetic Area at Variable Wind Speed over Time" Sustainability 11, no. 5: 1249. https://doi.org/10.3390/su11051249
APA StyleSorandaru, C., Musuroi, S., Frigura-Iliasa, F. M., Vatau, D., & Dordescu, M. (2019). Analysis of the Wind System Operation in the Optimal Energetic Area at Variable Wind Speed over Time. Sustainability, 11(5), 1249. https://doi.org/10.3390/su11051249