Multi-Spectral Ship Detection Using Optical, Hyperspectral, and Microwave SAR Remote Sensing Data in Coastal Regions


 , and
, and
Abstract
1. Introduction
2. Data
2.1. Hyperspectral Data
2.2. High-Resolution Optical Image
2.3. SAR Image
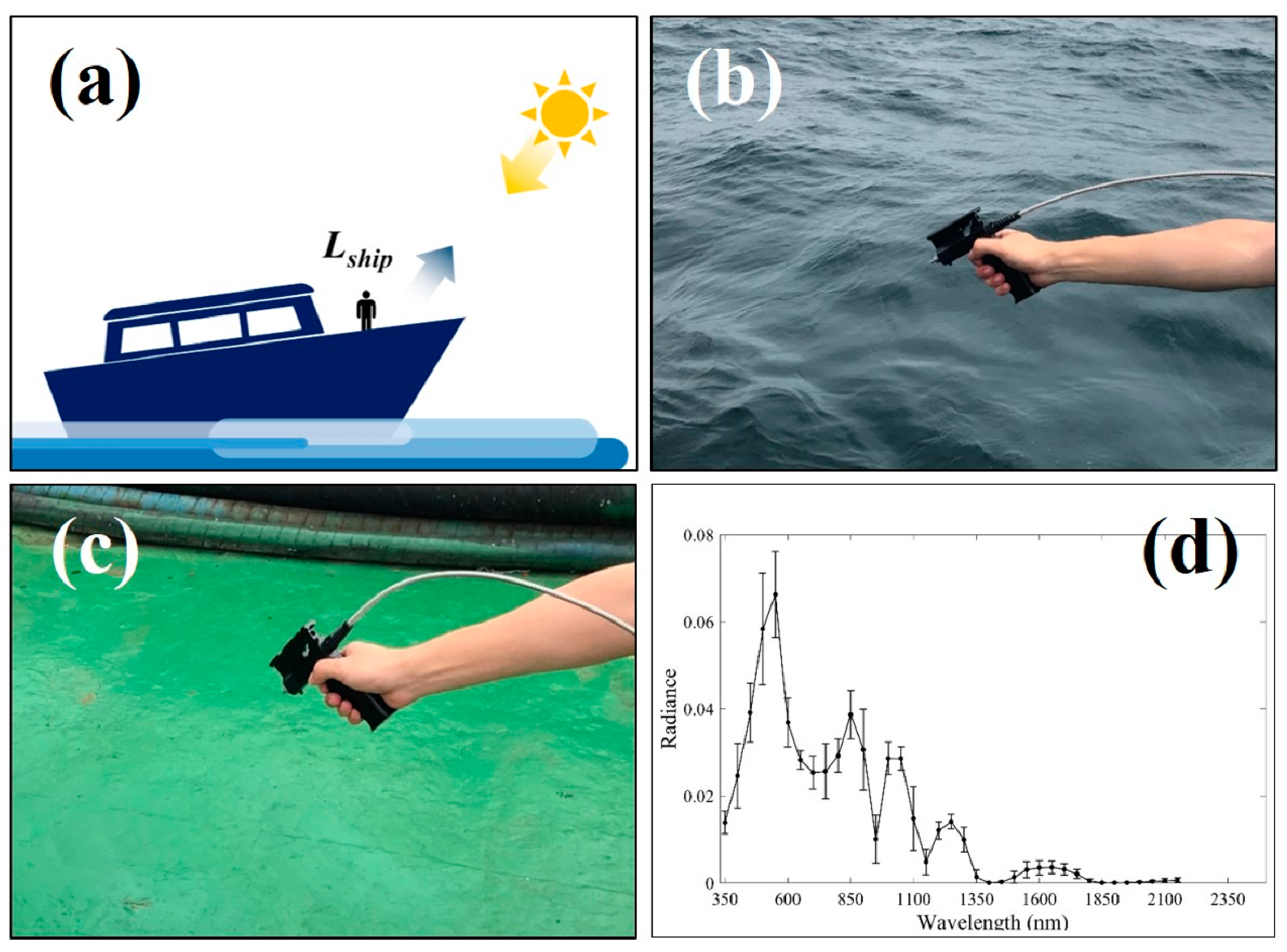
2.4. In-Situ Hyperspectral Measurement
2.5. In-Situ Data of Ship Positions
3. Methods
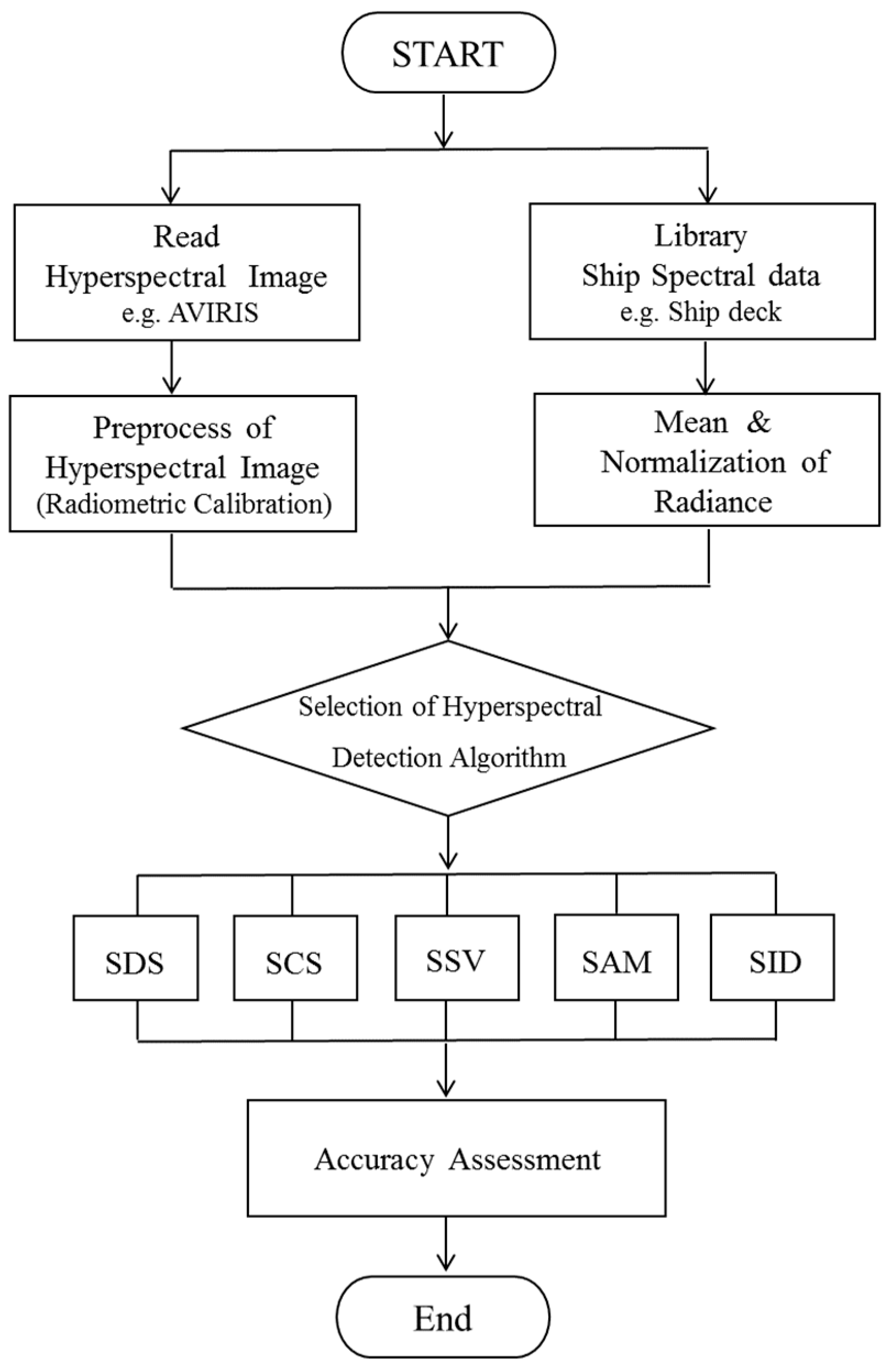
3.1. Ship Detection using Hyperspectral Data
3.1.1. Normalized Irradiance
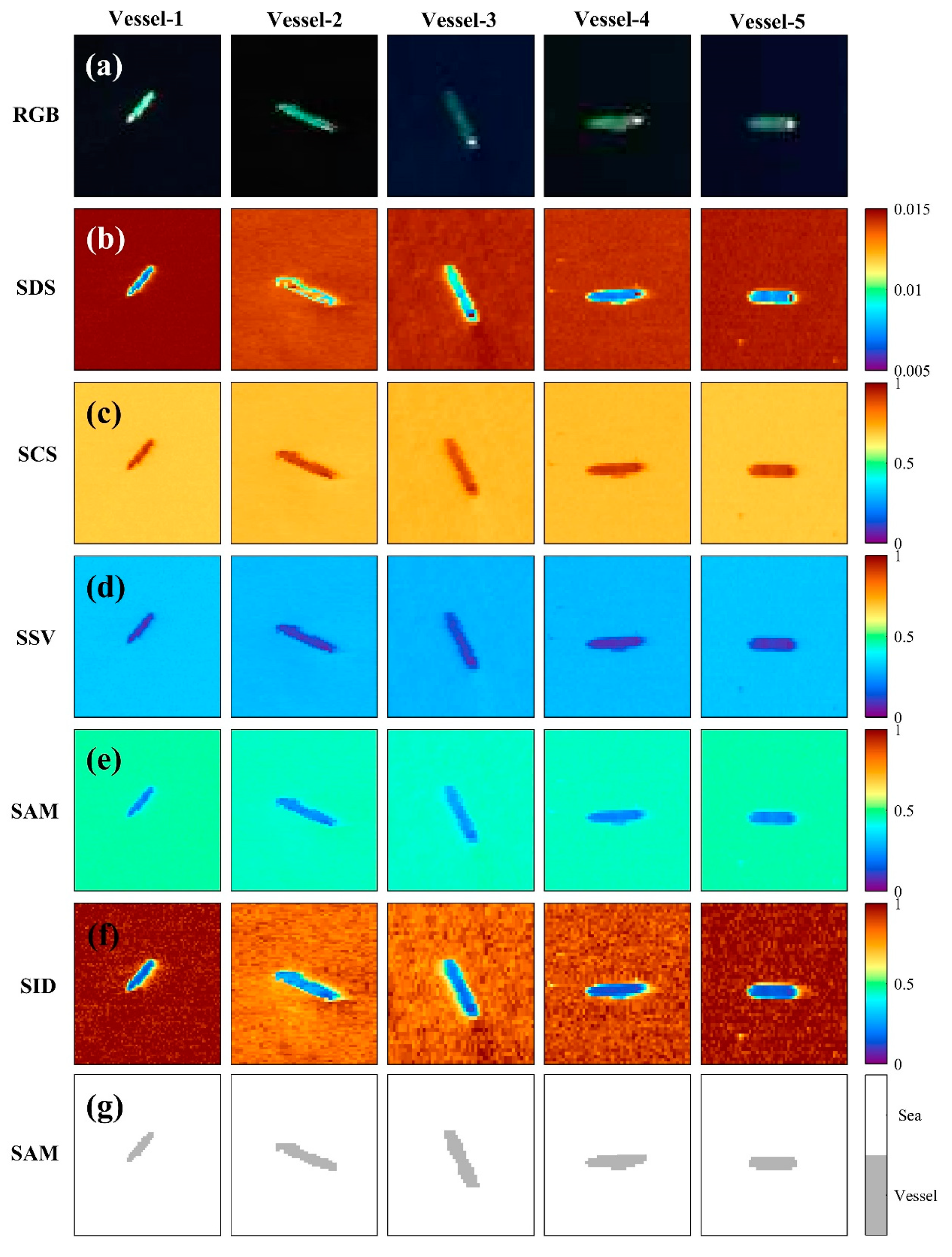
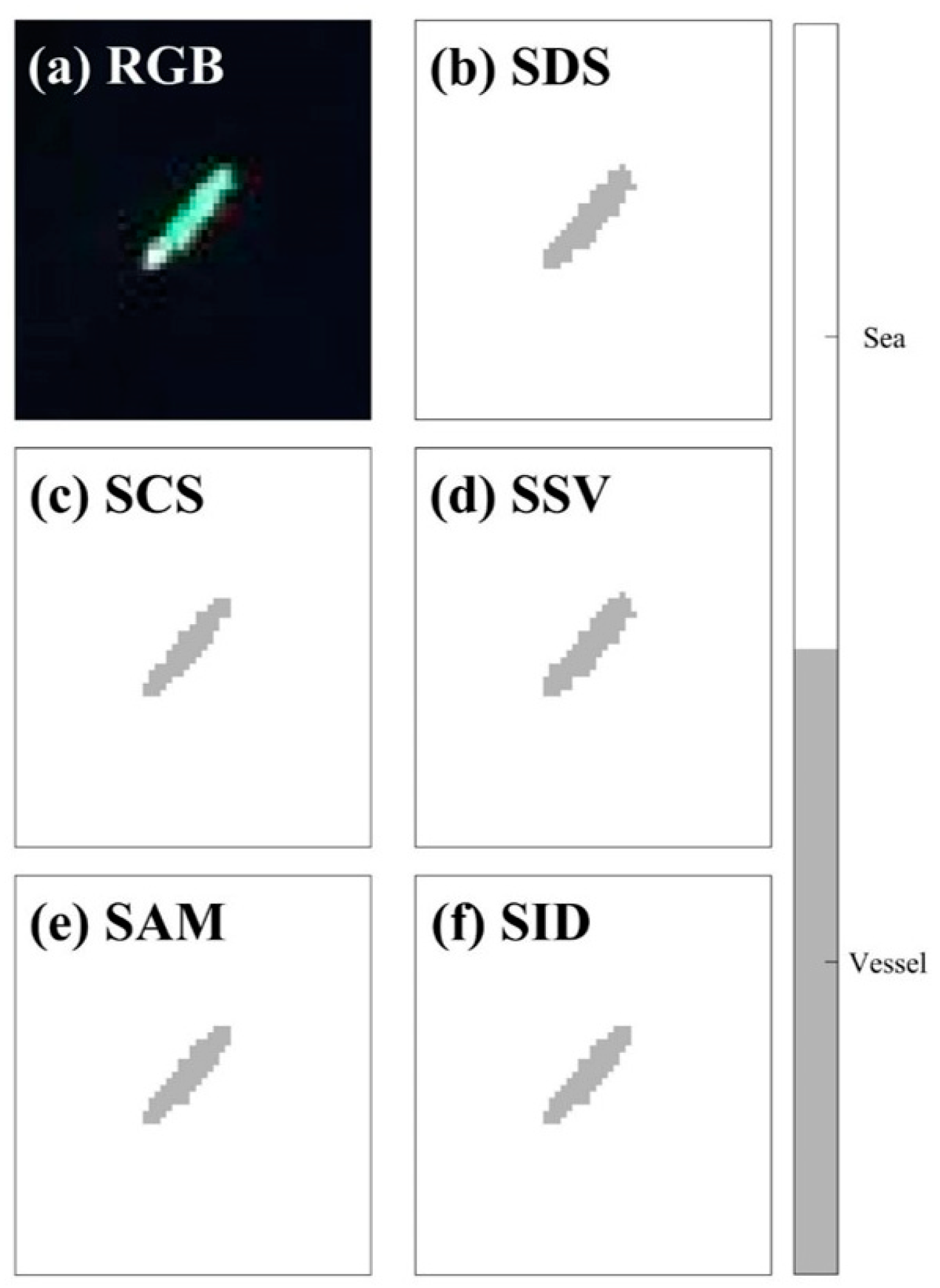
3.1.2. Spectral Similarity Derivation
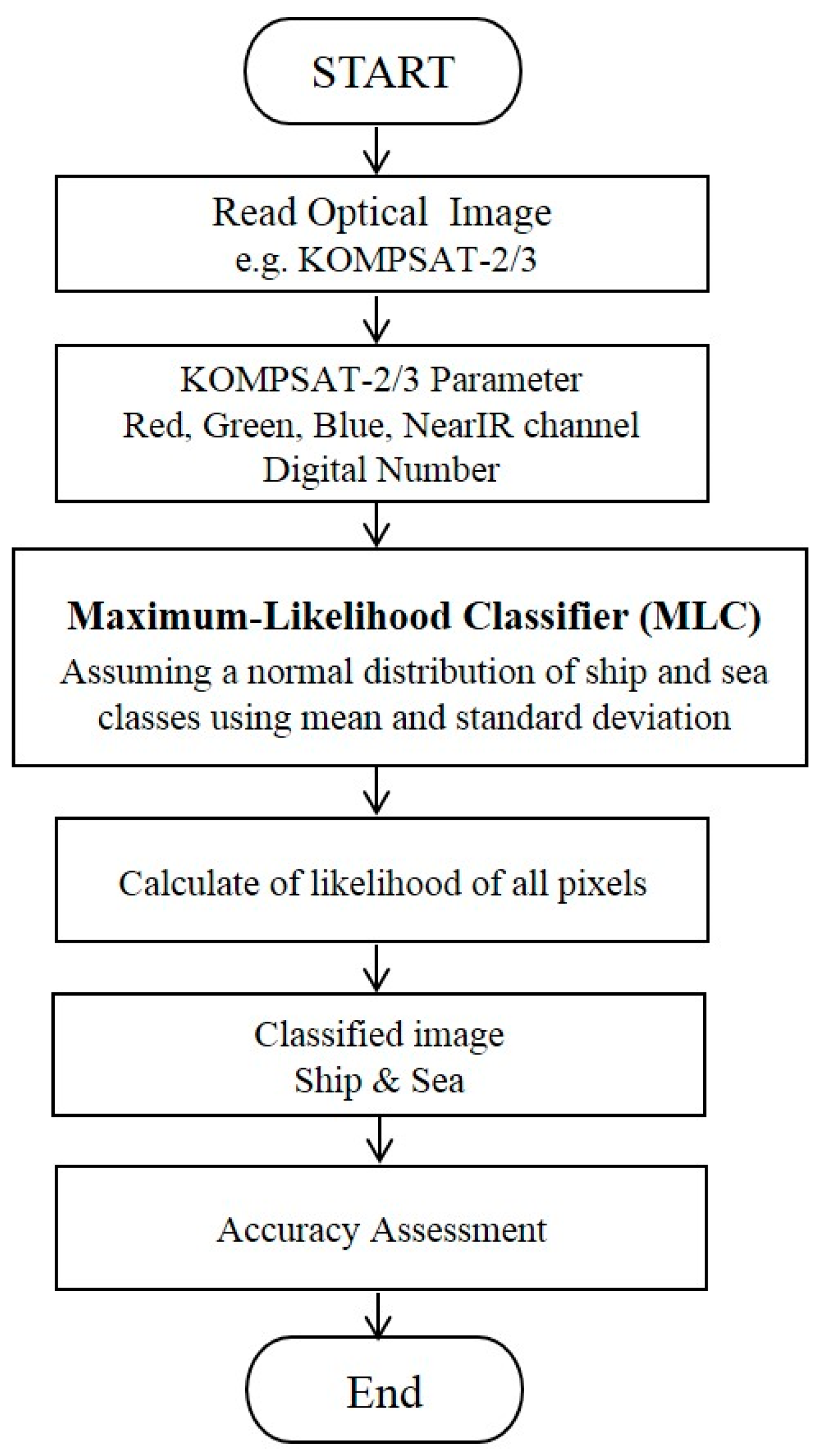
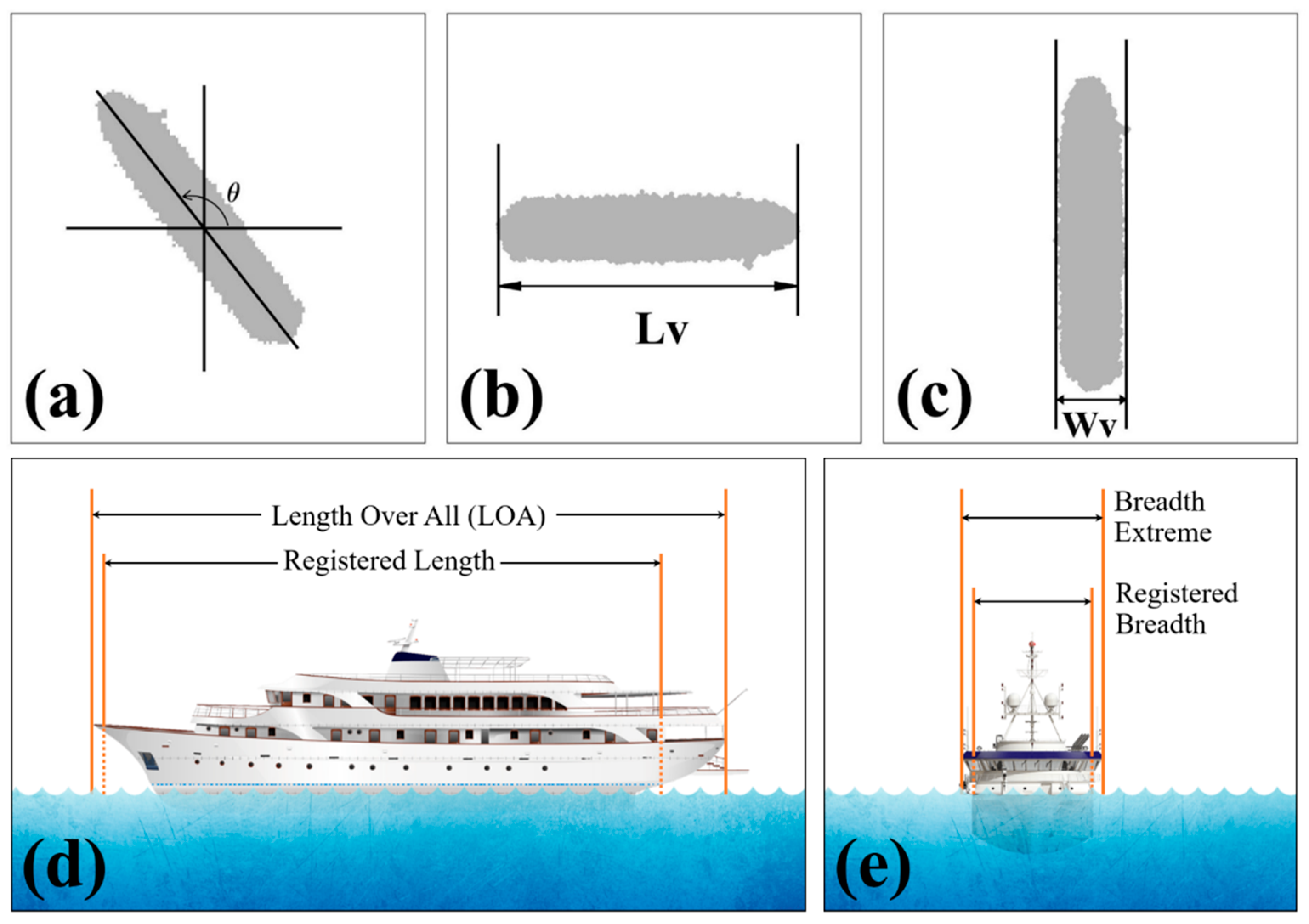
3.2. Ship Detection and Size Size from High-Resolution Optical Image
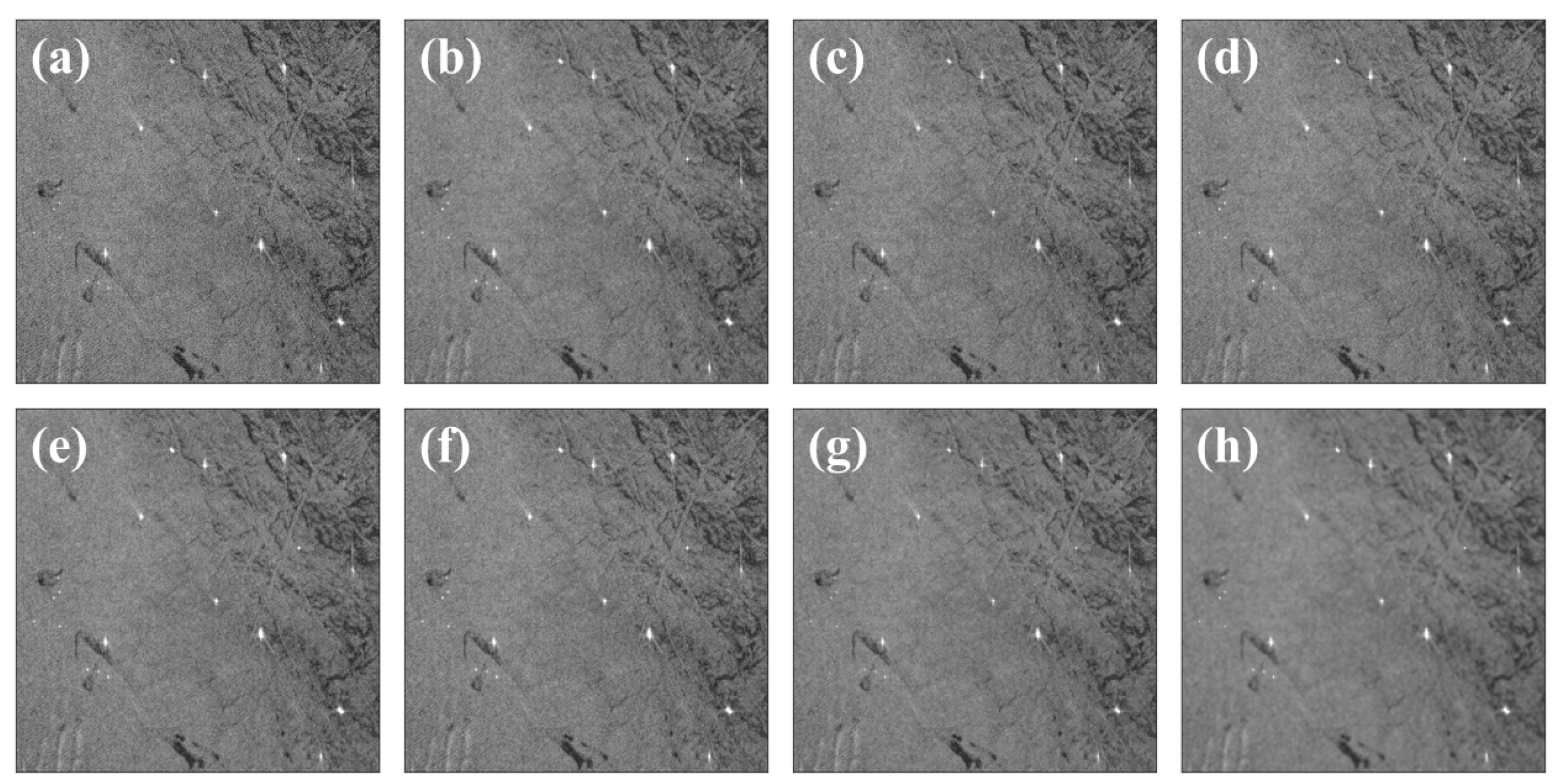
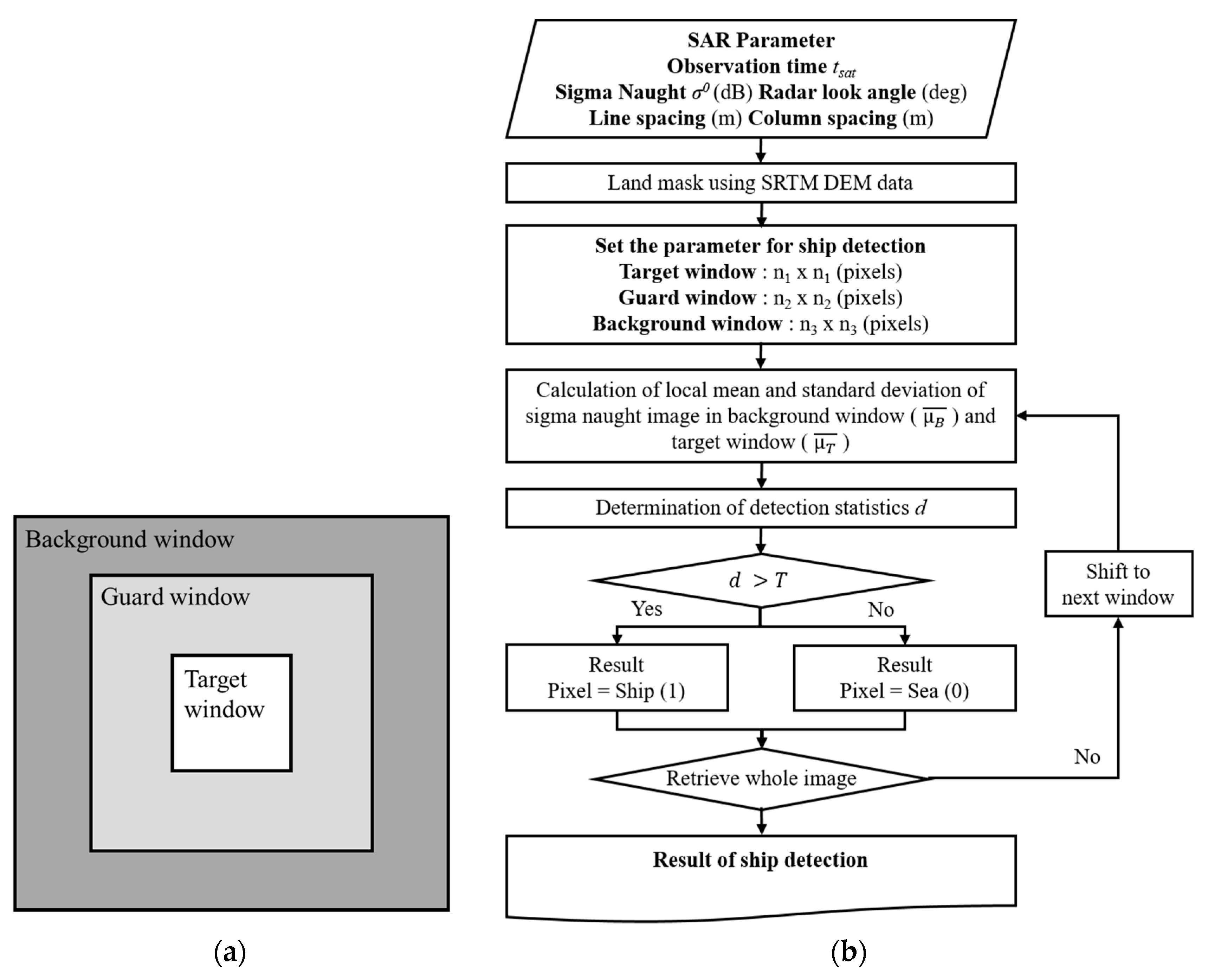
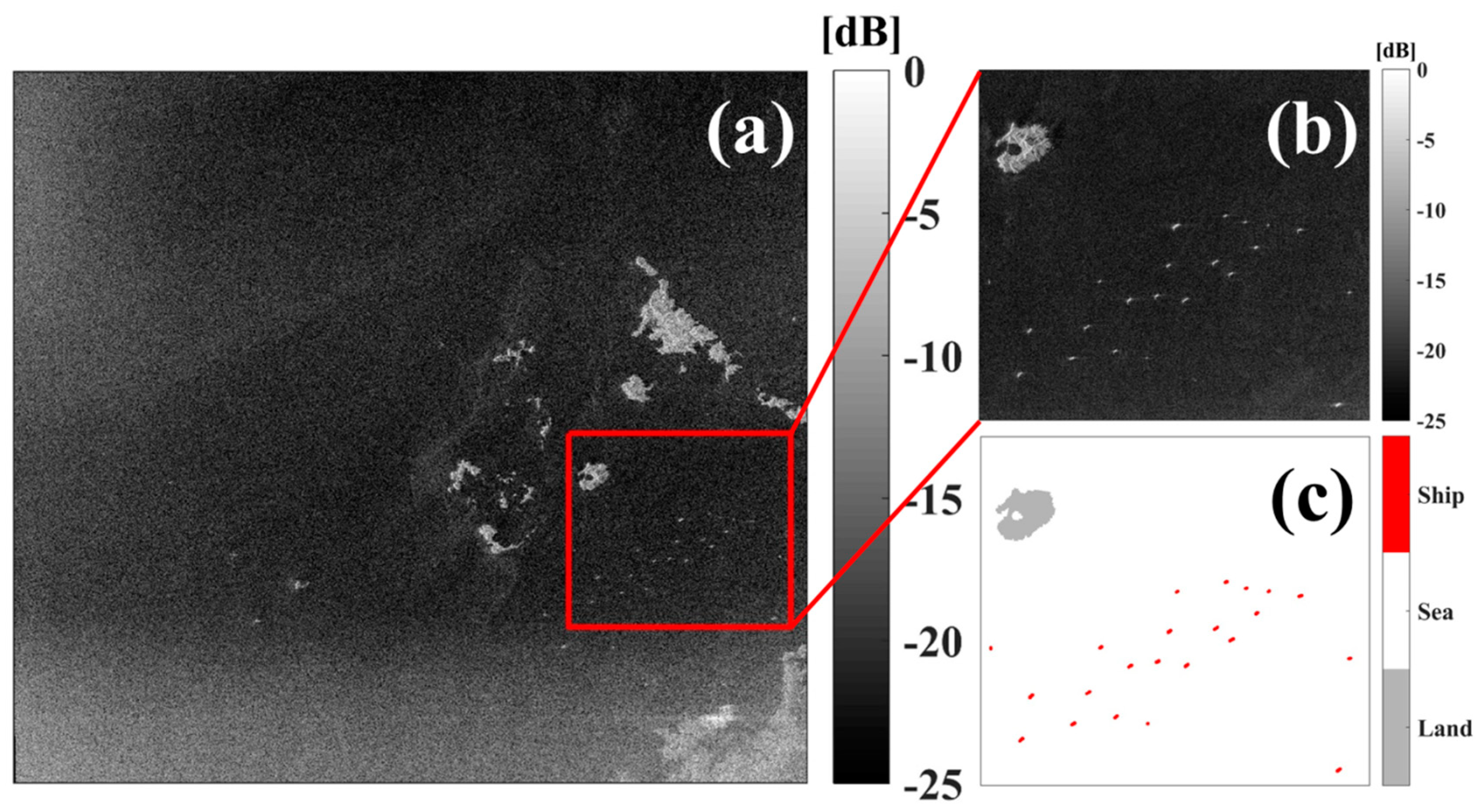
3.3. Ship Detection on SAR Image
4. Results
4.1. Hyperspectral-Based Ship Monitoring
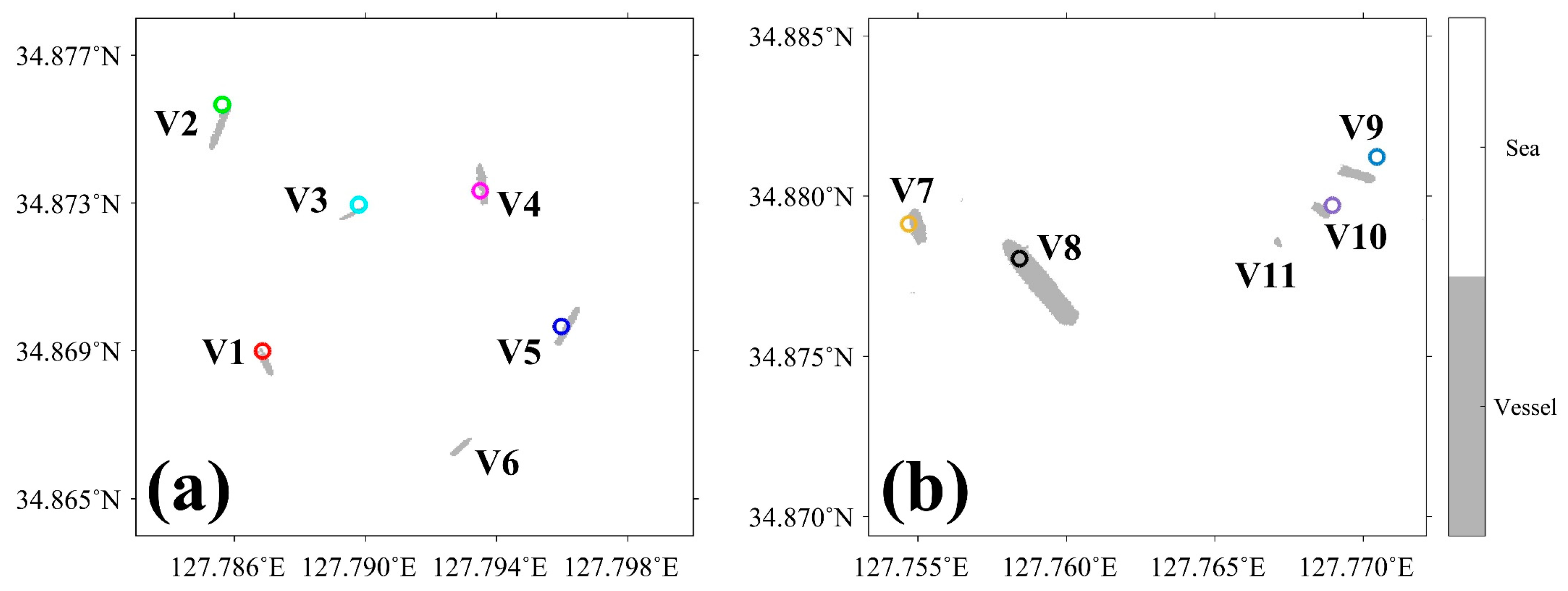
4.2. Optical Ship Monitoring and Validation
4.3. Validation of Estimated Ship Size from Optical Image
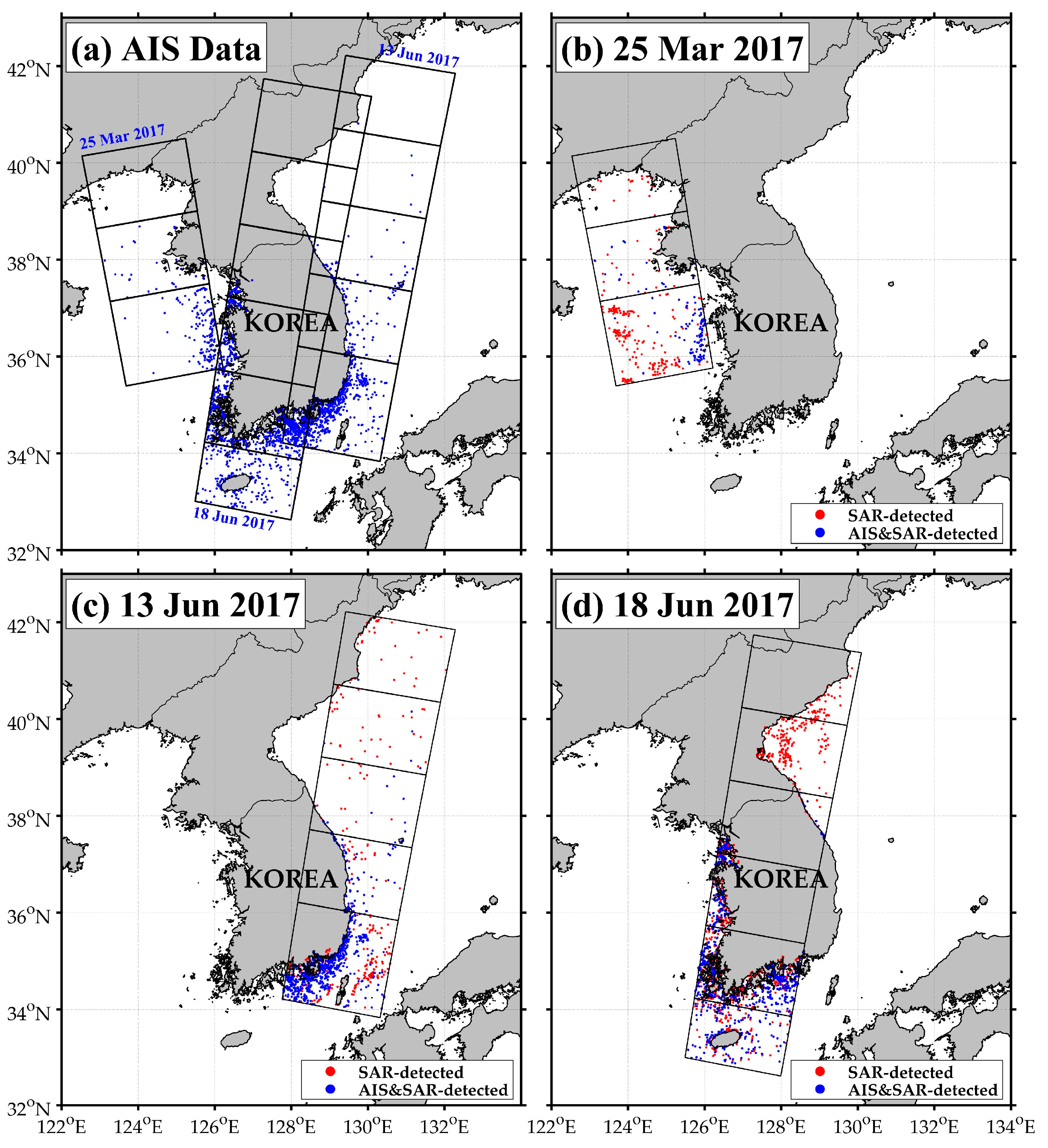
4.4. SAR-Based Ship Monitoring
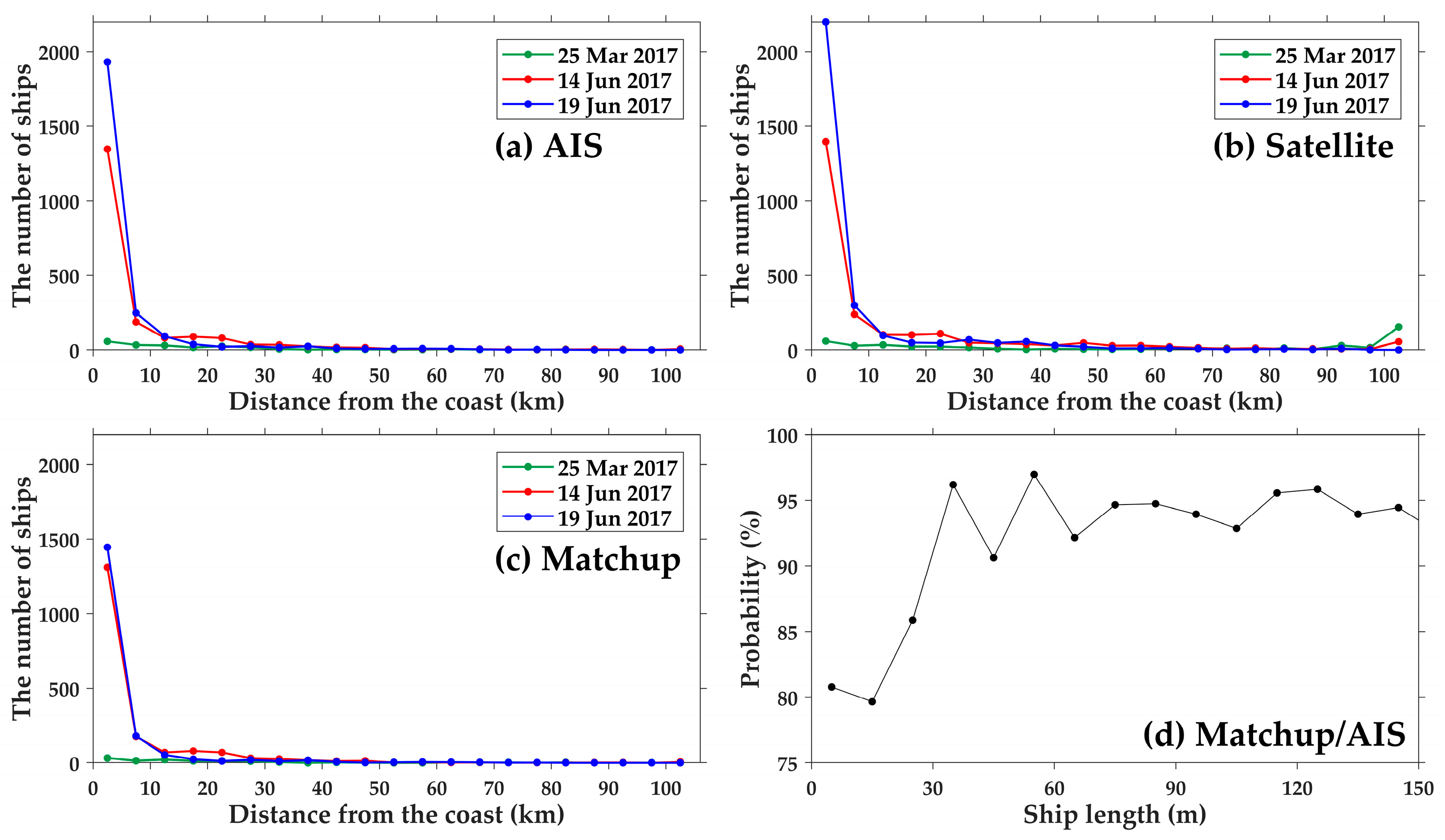
4.5. Validation of SAR-Based Ship Monitoring
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- United Nations. World population prospects: The 2015 revision. U. N. Econ. Soc. Aff. 2015, 33, 1–66. [Google Scholar]
- Sarel, M. Growth in East Asia: What We Can and What We Cannot Infer; International Monetary Fund: Washington, DC, USA, 1996; Volume 1. [Google Scholar]
- Bloom, D.E.; Canning, D.; Malaney, P.N. Population dynamics and economic growth in Asia. Popul. Dev. Rev. 2000, 26, 257–290. [Google Scholar]
- Rodrik, D. The past, present, and future of economic growth. Challenge 2014, 57, 5–39. [Google Scholar] [CrossRef]
- Alpers, W. Theory of radar imaging of internal waves. Nature 1985, 314, 245–247. [Google Scholar] [CrossRef]
- Alpers, W.; Hennings, I. A theory of the imaging mechanism of underwater bottom topography by real and synthetic aperture radar. J. Geophys. Res. 1984, 89, 10529–10546. [Google Scholar] [CrossRef]
- De Loor, G.P. The observation of tidal patterns, currents, and bathymetry with SLAR imagery of the sea. IEEE J. Ocean. Eng. 1981, 6, 124–129. [Google Scholar] [CrossRef]
- De Loor, G.P.; Van Hulten, H.B. Microwave measurements over the North Sea. Bound.-Layer Meteorol. 1978, 13, 113–131. [Google Scholar] [CrossRef]
- Fu, L.L.; Holt, B. Seasat Views Oceans and Sea Ice with Synthetic Aperture Radar; Jet Propulsion Lab.: Pasadena, CA, USA, 1982; pp. 81–120. [Google Scholar]
- Plant, W.J. A relationship between wind stress and wave slope. J. Geophys. Res. 1982, 87, 1961–1967. [Google Scholar] [CrossRef]
- Plant, W.J. A two-scale model of short wind-generated waves and scatterometry. J. Geophys. Res. 1986, 91, 10735–10749. [Google Scholar] [CrossRef]
- Romeiser, R.; Schmidt, A.; Alpers, W. A three-scale composite surface model for the ocean wave-radar modulation transfer function. J. Geophys. Res. 1994, 99, 9785–9801. [Google Scholar] [CrossRef]
- Romeiser, R.; Alpers, W.; Wismann, V. An improved composite surface model for the radar backscattering cross section of the ocean surface: 1. Theory of the model and optimization/validation by scatterometer data. J. Geophys. Res. 1997, 102, 25237–25250. [Google Scholar] [CrossRef]
- Valenzuela, G.R. Theories for the interaction of electromagnetic and ocean waves—A review. Bound. Layer Meteorol. 1978, 13, 61–85. [Google Scholar] [CrossRef]
- Gutiérrez, O.Q.; Filipponi, F.; Taramelli, A.; Valentini, E.; Camus Braña, P.; Méndez Incera, F.J. On the feasibility of the use of wind SAR to downscale waves on shallow water. Ocean Sci. 2016, 12, 39–49. [Google Scholar] [CrossRef]
- Kanjir, U.; Greidanus, H.; Oštir, K. Vessel detection and classification from spaceborne optical images: A literature survey. Remote Sens. Environ. 2018, 207, 1–26. [Google Scholar] [CrossRef] [PubMed]
- Corbane, C.; Marre, F.; Petit, M. Using SPOT-5 HRG data in panchromatic mode for operational detection of small ships in tropical area. Sensors 2008, 8, 2959–2973. [Google Scholar] [CrossRef] [PubMed]
- Wu, G.; de Leeuw, J.; Skidmore, A.K.; Liu, Y.; Prins, H.H. Performance of Landsat TM in ship detection in turbid waters. Int. J. Appl. Earth Obs. Geoinf. 2009, 11, 54–61. [Google Scholar] [CrossRef]
- Proia, N.; Pagé, V. Characterization of a bayesian ship detection method in optical satellite images. IEEE Geosci. Remote Sens. Lett. 2010, 7, 226–230. [Google Scholar] [CrossRef]
- Bi, F.; Zhu, B.; Gao, L.; Bian, M. A visual search inspired computational model for ship detection in optical satellite images. IEEE Geosci. Remote Sens. Lett. 2012, 9, 749–753. [Google Scholar]
- Máttyus, G. Near real-time automatic marine vessel detection on optical satellite images. ISPRS Arch. 2013, 40, 233–237. [Google Scholar] [CrossRef]
- Xu, J.; Sun, X.; Zhang, D.; Fu, K. Automatic detection of inshore ships in high-resolution remote sensing images using robust invariant generalized Hough transform. IEEE Geosci. Remote Sens. Lett. 2014, 11, 2070–2074. [Google Scholar]
- Tang, J.; Deng, C.; Huang, G.B.; Zhao, B. Compressed-domain ship detection on spaceborne optical image using deep neural network and extreme learning machine. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1174–1185. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, M.H.; Xu, P.; Guo, Z.W. SAR ship detection using sea-land segmentation-based convolutional neural network. In Proceedings of the 2017 International Workshop on Remote Sensing with Intelligent Processing (RSIP), Shanghai, China, 18–21 May 2017. [Google Scholar]
- Kang, M.; Leng, X.; Lin, Z.; Ji, K. A modified faster R-CNN based on CFAR algorithm for SAR ship detection. In Proceedings of the 2017 International Workshop on Remote Sensing with Intelligent Processing (RSIP), Shanghai, China, 18–21 May 2017. [Google Scholar]
- Jiang, Q.; Aitnouri, E.; Wang, S.; Ziou, D. Automatic detection for ship target in SAR imagery using PNN-model. Can. J. Remote Sens. 2000, 26, 297–305. [Google Scholar] [CrossRef]
- Gambardella, A.; Nunziata, F.; Migliaccio, M. A physical full-resolution SAR ship detection filter. IEEE Geosci. Remote Sens. Lett. 2008, 5, 760–763. [Google Scholar] [CrossRef]
- Pieralice, F.; Proietti, R.; La Valle, P.; Giorgi, G.; Mazzolena, M.; Taramelli, A.; Nicoletti, L. An innovative methodological approach in the frame of Marine Strategy Framework Directive: A statistical model based on ship detection SAR data for monitoring programmes. Mar. Environ. Res. 2014, 102, 18–35. [Google Scholar] [CrossRef] [PubMed]
- Eldhuset, K. An automatic ship and ship wake detection system for spaceborne SAR images in coastal regions. IEEE Trans. Geosci. Remote Sens. 1996, 34, 1010–1019. [Google Scholar] [CrossRef]
- Wackerman, C.C.; Friedman, K.S.; Pichel, W.G.; Clemente-Colón, P.; Li, X. Automatic detection of ships in RADARSAT-1 SAR imagery. Can. J. Remote Sens. 2001, 27, 568–577. [Google Scholar] [CrossRef]
- Zhang, F.; Wu, B.A. Scheme for ship detection in inhomogeneous regions based on segmentation of SAR images. Int. J. Remote Sens. 2008, 29, 5733–5747. [Google Scholar] [CrossRef]
- Vachon, P.W.; Wolfe, J. Validation of Ship Signatures in Envisat ASAR AP Mode Data Using AISLive; Defence Research And Development: Ottawa, ON, Canada, 2008. [Google Scholar]
- Brusch, S.; Lehner, S.; Fritz, T.; Soccorsi, M.; Soloviev, A.; van Schie, B. Ship surveillance with TerraSAR-X. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1092–1103. [Google Scholar] [CrossRef]
- Pastina, D.; Fico, F.; Lombardo, P. Detection of ship targets in COSMO-SkyMed SAR images. In Proceedings of the Radar Conference (RADAR), Kansas City, MO, USA, 23–27 May 2011. [Google Scholar]
- Wang, C.; Zhang, H.; Wu, F.; Zhang, B.; Tian, S. Ship classification with deep learning using COSMO-SkyMed SAR data. In Proceedings of the Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017. [Google Scholar]
- Vachon, P.W.; Wolfe, J.; Greidanus, H. Analysis of Sentinel-1 marine applications potential. In Proceedings of the Geoscience and Remote Sensing Symposium (IGARSS), Munich, Germany, 22–27 July 2012. [Google Scholar]
- Velotto, D.; Bentes, C.; Tings, B.; Lehner, S. Comparison of Sentinel-1 and TerraSAR-X for ship detection. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015. [Google Scholar]
- Cusano, M.; Lichtenegger, J.; Lombardo, P.; Petrocchi, A.; Zanovello, D. A real time operational scheme for ship traffic monitoring using quick look ERS SAR images. In Proceedings of the Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 24–28 July 2000. [Google Scholar]
- Vachon, P.; Thomas, S.; Cranton, J.; Edel, H.; Henschel, M. Validation of ship detection by the RADARSAT synthetic aperture radar and the ocean monitoring workstation. Can. J. Remote Sens. 2000, 26, 200–212. [Google Scholar] [CrossRef]
- Jiang, Q.; Wang, S.; Ziou, D.; Zaart, A. Automatic detection for ship targets in RADARSAT SAR images from coastal regions. In Proceedings of the Vision Interface, Trois-Rivieres, QC, Canada, 18–21 May 1999. [Google Scholar]
- Greidanus, H.; Clayton, P.; Indregard, M.; Staples, G.; Suzuki, N.; Vachoir, P.; Ringrose, R. Benchmarking operational SAR ship detection. In Proceedings of the Geoscience and Remote Sensing Symposium, Anchorage, AK, USA, 20–24 September 2004. [Google Scholar]
- Marino, A.; Sanjuan-Ferrer, M.J.; Hajnsek, I.; Ouchi, K. Ship detection with spectral analysis of synthetic aperture radar: A comparison of new and well-known algorithms. Remote Sens. 2015, 7, 5416–5439. [Google Scholar] [CrossRef]
- Wang, W.; Ji, Y.; Lin, X. A novel fusion-based ship detection method from Pol-SAR images. Sensors 2015, 15, 25072–25089. [Google Scholar] [CrossRef] [PubMed]
- Gao, G.; Shi, G.; Li, G.; Cheng, J. Performance Comparison Between Reflection Symmetry Metric and Product of Multilook Amplitudes for Ship Detection in Dual-Polarization SAR Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 5026–5038. [Google Scholar] [CrossRef]
- Wang, C.; Liao, M.; Li, X. Ship detection in SAR image based on the alpha-stable distribution. Sensors 2008, 8, 4948–4960. [Google Scholar] [CrossRef] [PubMed]
- Khesali, E.; Enayati, H.; Modiri, M.; Aref, M.M. Automatic ship detection in Single-Pol SAR Images using texture features in artificial neural networks. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 395. [Google Scholar] [CrossRef]
- Touzi, R.; Vachon, P.W. RCM polarimetric SAR for enhanced ship detection and classification. Can. J. Remote Sens. 2015, 41, 473–484. [Google Scholar] [CrossRef]
- Lee, E.-B.; Yun, J.-H.; Chung, S.-T. A study on the development of the response resource model of hazardous and noxious substances based on the risks of marine accidents in Korea. J. Navig. Port Res. 2012, 36, 857–864. [Google Scholar] [CrossRef]
- Kim, M.; Yim, U.H.; Hong, S.H.; Jung, J.-H.; Choi, H.-W.; An, J.; Won, J.; Shim, W.J. Hebei Spirit oil spill monitored on site by fluorometric detection of residual oil in coastal waters off Taean, Korea. Mar. Pollut. Bull. 2010, 60, 383–389. [Google Scholar] [CrossRef] [PubMed]
- Kim, T.-S.; Park, K.-A.; Li, X.; Lee, M.; Hong, S.; Lyu, S.J.; Nam, S. Detection of the Hebei Spirit oil spill on SAR imagery and its temporal evolution in a coastal region of the Yellow Sea. Adv. Space Res. 2015, 56, 1079–1093. [Google Scholar] [CrossRef]
- Lee, M.-S.; Park, K.-A.; Lee, H.-R.; Park, J.-J.; Kang, C.-K.; Lee, M. Detection and dispersion of thick and film-like oil spills in a coastal bay using satellite optical images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 5139–5150. [Google Scholar] [CrossRef]
- Corbane, C.; Najman, L.; Pecoul, E.; Demagistri, L.; Petit, M. A complete processing chain for ship detection using optical satellite imagery. Int. J. Remote Sens. 2010, 31, 5837–5854. [Google Scholar] [CrossRef]
- Vane, G.; Green, R.O.; Chrien, T.G.; Enmark, H.T.; Hansen, E.G.; Porter, W.M. The airborne visible/infrared imaging spectrometer (AVIRIS). Remote Sens. Environ. 1993, 44, 127–143. [Google Scholar] [CrossRef]
- Green, R.O.; Eastwood, M.L.; Sarture, C.M.; Chrien, T.G.; Aronsson, M.; Chippendale, B.J.; Faust, J.A.; Pavri, B.E.; Chovit, C.J.; Solis, M. Imaging spectroscopy and the airborne visible/infrared imaging spectrometer (AVIRIS). Remote Sens. Environ. 1998, 65, 227–248. [Google Scholar] [CrossRef]
- Taramelli, A.; Valentini, E.; Innocenti, C.; Cappucci, S. FHYL: Field spectral libraries, airborne hyperspectral images and topographic and bathymetric LiDAR data for complex coastal mapping. In Proceeding of the Geoscience and Remote Sensing Symposium (IGARSS), Melbourne, Australia, 21–26 July 2013; pp. 2270–2273. [Google Scholar]
- An, K. A Study on the improvement of maritime traffic management by introducing e-navigation. J. Korean Soc. Mar. Environ. Saf. 2015, 21, 164–170. [Google Scholar] [CrossRef]
- Sridhar, B.M.; Vincent, R.K.; Witter, J.D.; Spongberg, A.L. Mapping the total phosphorus concentration of biosolid amended surface soils using LANDSAT TM data. Sci. Total Environ. 2009, 407, 2894–2899. [Google Scholar] [CrossRef] [PubMed]
- Homayouni, S.; Roux, M. Hyperspectral image analysis for material mapping using spectral matching. In Proceeding of the International Symposium on Planetary Remote Sensing and Mapping (ISPRS) Congress, Istanbul, Turkey, 12–23 July 2004. [Google Scholar]
- Kumar, A.S.; Keerthi, V.; Manjunath, A.; van der Werff, H.; van der Meer, F. Hyperspectral image classification by a variable interval spectral average and spectral curve matching combined algorithm. Int. J. Appl. Earth Obs. Geoinf. 2010, 12, 261–269. [Google Scholar] [CrossRef]
- Sweet, J.N. The spectral similarity scale and its application to the classification of hyperspectral remote sensing data. In Proceedings of the Advances in Techniques for Analysis of Remotely Sensed Data, Greenbelt, MD, USA, 27–28 October 2003. [Google Scholar]
- Schwarz, J.; Staenz, K. Adaptive threshold for spectral matching of hyperspectral data. Can. J. Remote Sens. 2001, 27, 216–224. [Google Scholar] [CrossRef]
- Chang, C.-I. Spectral information divergence for hyperspectral image analysis. In Proceedings of the Geoscience and Remote Sensing Symposium (IGARSS), Hamburg, Germany, 28 June–2 July 1999. [Google Scholar]
- Zhu, A.; Liu, F.; Li, B.; Pei, T.; Qin, C.; Liu, G.; Zhou, C. Differentiation of soil conditions over low relief areas using feedback dynamic patterns. Soil Sci. Soc. Am. J. 2010, 74, 861–869. [Google Scholar] [CrossRef]
- Richards, J.A.; Richards, J. Remote Sensing Digital Image Analysis; Springer: Berlin, Germany, 1999; Volume 3. [Google Scholar]
- Rey, M.T.; Tunaley, J.K.; Folinsbee, J.T.; Jahans, P.A.; Dixon, J.A.; Vant, M.R. Application of Radon transform techniques to wake detection in Seasat-A SAR images. IEEE Trans. Geosci. Remote Sens. 1990, 28, 553–560. [Google Scholar] [CrossRef]
- Jafari-Khouzani, K.; Soltanian-Zadeh, H. Radon transform orientation estimation for rotation invariant texture analysis. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 1004–1008. [Google Scholar] [CrossRef] [PubMed]
- Tabbone, S.; Wendling, L.; Salmon, J.P. A new shape descriptor defined on the Radon transform. Comput. Vis. Image Underst. 2006, 102, 42–51. [Google Scholar] [CrossRef]
- Lin, I.; Kwoh, L.K.; Lin, Y.-C.; Khoo, V. Ship and ship wake detection in the ERS SAR imagery using computer-based algorithm. In Proceedings of the Geoscience and Remote Sensing Symposium (IGARSS), Singapore, 3–8 August 1997. [Google Scholar]
- Askari, F.; Zerr, B. An Automatic Approach to Ship Detection in Spaceborne Synthetic Aperture Radar Imagery: An Assessment of Ship Detection Capability Using Radarsat; Saclant Undersea Research Centre: La Spezia, Italy, 2000. [Google Scholar]
- Crisp, D.J. The State-of-the-Art in Ship Detection in Synthetic Aperture Radar Imagery; Defence Science and Technology Organization Salisbury (Australia) Info Sciences Lab.: Sydney, Australia, 2004. [Google Scholar]
- Lee, J.S. Digital image enhancement and noise filtering by use of local statistics. IEEE Trans. Pattern Anal. Mach. Intell. 1980, 2, 165–168. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.S. Digital image smoothing and the sigma filter. Comput. Vis. Graph. Image Process. 1983, 24, 255–269. [Google Scholar] [CrossRef]
- Lee, J.S.; Jurkevich, L.; Dewaele, P.; Wambacq, P.; Oosterlinck, A. Speckle filtering of synthetic aperture radar images A review. Remote Sens. Rev. 1994, 8, 313–340. [Google Scholar] [CrossRef]
- Huang, Y.; Van Genderen, J.L. Evaluation of several speckle filtering techniques for ERS-1&2 imagery. Int. Arch. Photogramm. Remote Sens. 1996, 31, 164–169. [Google Scholar]
- Argenti, F.; Lapini, A.; Bianchi, T.; Alparone, L. A tutorial on speckle reduction in synthetic aperture radar images. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–35. [Google Scholar] [CrossRef]
- Greidanus, H.; Alvarez, M.; Santamaria, C.; Thoorens, F.X.; Kourti, N.; Argentieri, P. The SUMO ship detector algorithm for satellite radar images. Remote Sens. 2017, 9, 246. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vessel | Satellite | AIS | Difference | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Longitude | Latitude | Time | Longitude | Latitude | Time | Distance | Time | ||
| KOMPSAT-2 | V1 | 127.7870° E | 34.8687° N | 15 Mar. 2016 02:02:33 | 127.7869° E | 34.8689° N | 15 Mar. 2016 02:01:12 | 23.93 m | 00:01:21 |
| V2 | 127.7856° E | 34.8751° N | 15 Mar. 2016 02:02:33 | 127.7856° E | 34.8756° N | 15 Mar. 2016 02:05:07 | 49.59 m | 00:02:34 | |
| V3 | 127.7896° E | 34.8727° N | 15 Mar. 2016 02:02:33 | 127.7897° E | 34.8729° N | 15 Mar. 2016 02:03:26 | 20.66 m | 00:00:53 | |
| V4 | 127.7936° E | 34.8736° N | 15 Mar. 2016 02:02:33 | 127.7935° E | 34.8733° N | 15 Mar. 2016 02:03:24 | 29.95 m | 00:00:51 | |
| V5 | 127.7962° E | 34.8697° N | 15 Mar. 2016 02:02:33 | 127.7959° E | 34.8696° N | 15 Mar. 2016 02:03:28 | 27.10 m | 00:00:55 | |
| V6 | 127.7929° E | 34.8664° N | 15 Mar. 2016 02:02:33 | − | − | − | − | − | |
| KOMPSAT-3 | V7 | 127.7550° E | 34.8791° N | 7 Sep. 2014 04:38:33 | 127.7547° E | 34.8791° N | 7 Sep. 2014 04:38:12 | 31.30 m | 00:00:21 |
| V8 | 127.7593° E | 34.8773° N | 7 Sep. 2014 04:38:33 | 127.7584° E | 34.8780° N | 7 Sep. 2014 04:39:02 | 114.4 m | 00:00:29 | |
| V9 | 127.7697° E | 34.8807° N | 7 Sep. 2014 04:38:33 | 127.7705° E | 34.8812° N | 7 Sep. 2014 04:38:45 | 92.60 m | 00:00:12 | |
| V10 | 127.7867° E | 34.8796° N | 7 Sep. 2014 04:38:33 | 127.7690° E | 34.8797° N | 7 Sep. 2014 04:38:55 | 28.70 m | 00:00:22 | |
| V11 | 127.7671° E | 34.8785° N | 7 Sep. 2014 04:38:33 | − | − | − | − | − | |
| No. of Ships from AIS | No. of Ships Detected by SAR | No. of Ships from Matchup | POD | ||
|---|---|---|---|---|---|
| All region | 25 March 2017 | 215 | 802 | 165 | 76.7% |
| 13 June 2017 | 1954 | 2138 | 1748 | 89.5% | |
| 18 June 2017 | 2444 | 3096 | 2105 | 86.1% | |
| Total | 4613 | 6036 | 4018 | 87.1% | |
| Except North Korea | 25 March 2017 | 208 | 536 | 159 | 76.4% |
| 13 June 2017 | 1934 | 2023 | 1735 | 89.7% | |
| 18 June 2017 | 2432 | 2718 | 2093 | 86.1% | |
| Total | 4574 | 5277 | 3987 | 87.2% | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, K.-A.; Park, J.-J.; Jang, J.-C.; Lee, J.-H.; Oh, S.; Lee, M. Multi-Spectral Ship Detection Using Optical, Hyperspectral, and Microwave SAR Remote Sensing Data in Coastal Regions. Sustainability 2018, 10, 4064. https://doi.org/10.3390/su10114064
Park K-A, Park J-J, Jang J-C, Lee J-H, Oh S, Lee M. Multi-Spectral Ship Detection Using Optical, Hyperspectral, and Microwave SAR Remote Sensing Data in Coastal Regions. Sustainability. 2018; 10(11):4064. https://doi.org/10.3390/su10114064
Chicago/Turabian StylePark, Kyung-Ae, Jae-Jin Park, Jae-Cheol Jang, Ji-Hyun Lee, Sangwoo Oh, and Moonjin Lee. 2018. "Multi-Spectral Ship Detection Using Optical, Hyperspectral, and Microwave SAR Remote Sensing Data in Coastal Regions" Sustainability 10, no. 11: 4064. https://doi.org/10.3390/su10114064
APA StylePark, K.-A., Park, J.-J., Jang, J.-C., Lee, J.-H., Oh, S., & Lee, M. (2018). Multi-Spectral Ship Detection Using Optical, Hyperspectral, and Microwave SAR Remote Sensing Data in Coastal Regions. Sustainability, 10(11), 4064. https://doi.org/10.3390/su10114064