Marine Oil Spill Detection Based on the Comprehensive Use of Polarimetric SAR Data



Abstract
1. Introduction
2. Theory and Methods
2.1. Fundamentals of Polarimetric SAR
Quad-Polarimetric SAR Mode
2.2. Polarimetric Filters
2.2.1. Boxcar Filter
2.2.2. Refined Lee
- (a)
- Selecting a nonsquare window to match the direction of edges in the span image;
- (b)
- Applying local statistics filter to the span image based on the multiplicative noise model;
- (c)
- Using the window directions and weight derived in (a) and (b) to filter the whole covariance matrix.
2.2.3. Lopez Filter
2.3. Polarimetric Features for Marine Oil Spills Detection
2.4. Deep Learning Classification Algorithm
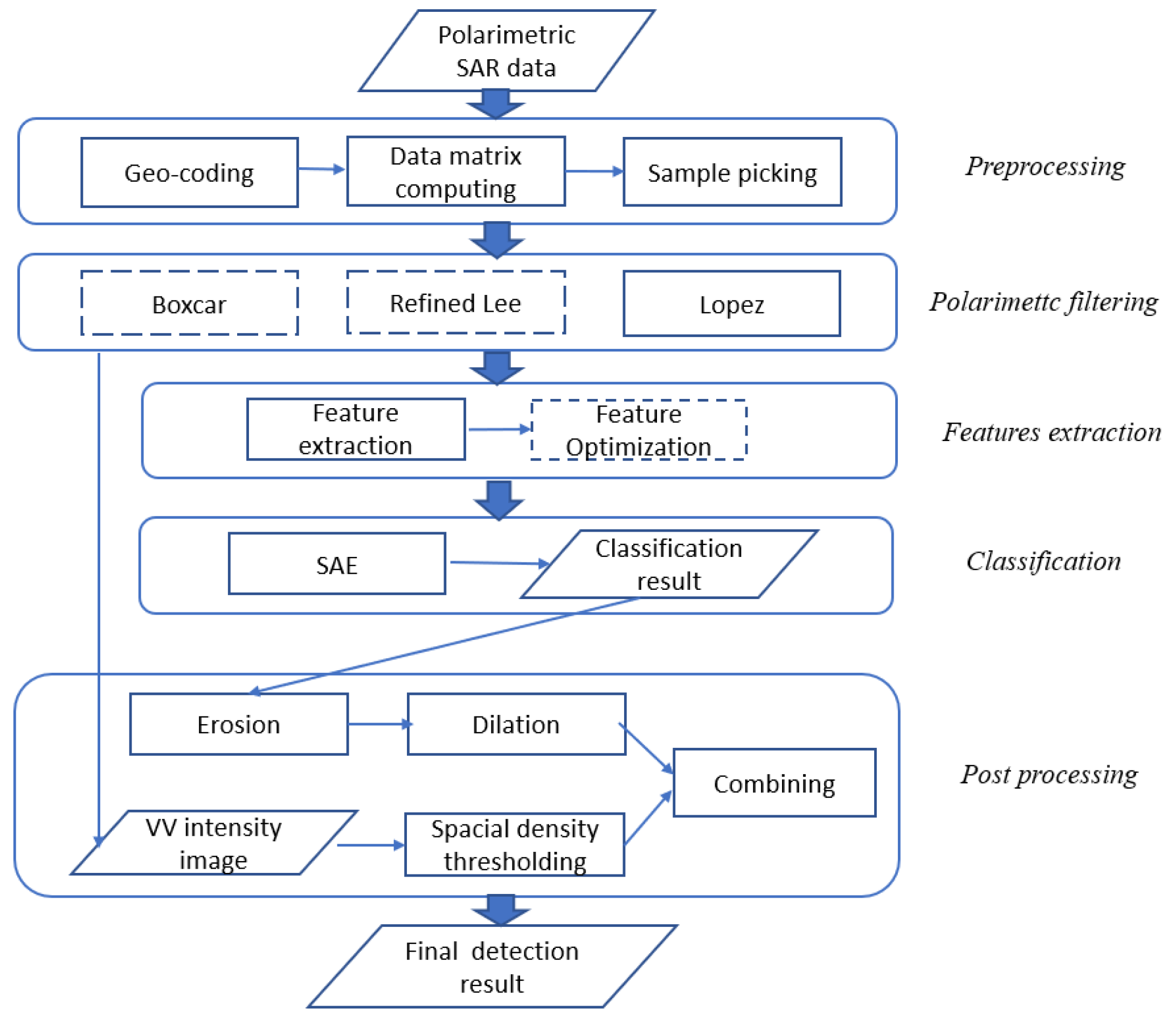
2.5. The Architecture for Marine Oil Spill Detection Based on Polarimetric SAR
2.5.1. Preprocessing
2.5.2. Polarimetric Filtering
2.5.3. Features Extraction
2.5.4. Classification
2.5.5. Post Processing
- Conduct eroding to the classification map to eliminate separate false targets to obtain IErosion
- Conduct dilating to the resulting map to fix holes and link nearby oil slick pieces to obtain IDilation
- Multiply the processed classification map with the output of SDT to take the best advantage of the classification result and precise boundary details and shape information of oil slicks.
3. Experiment and Results
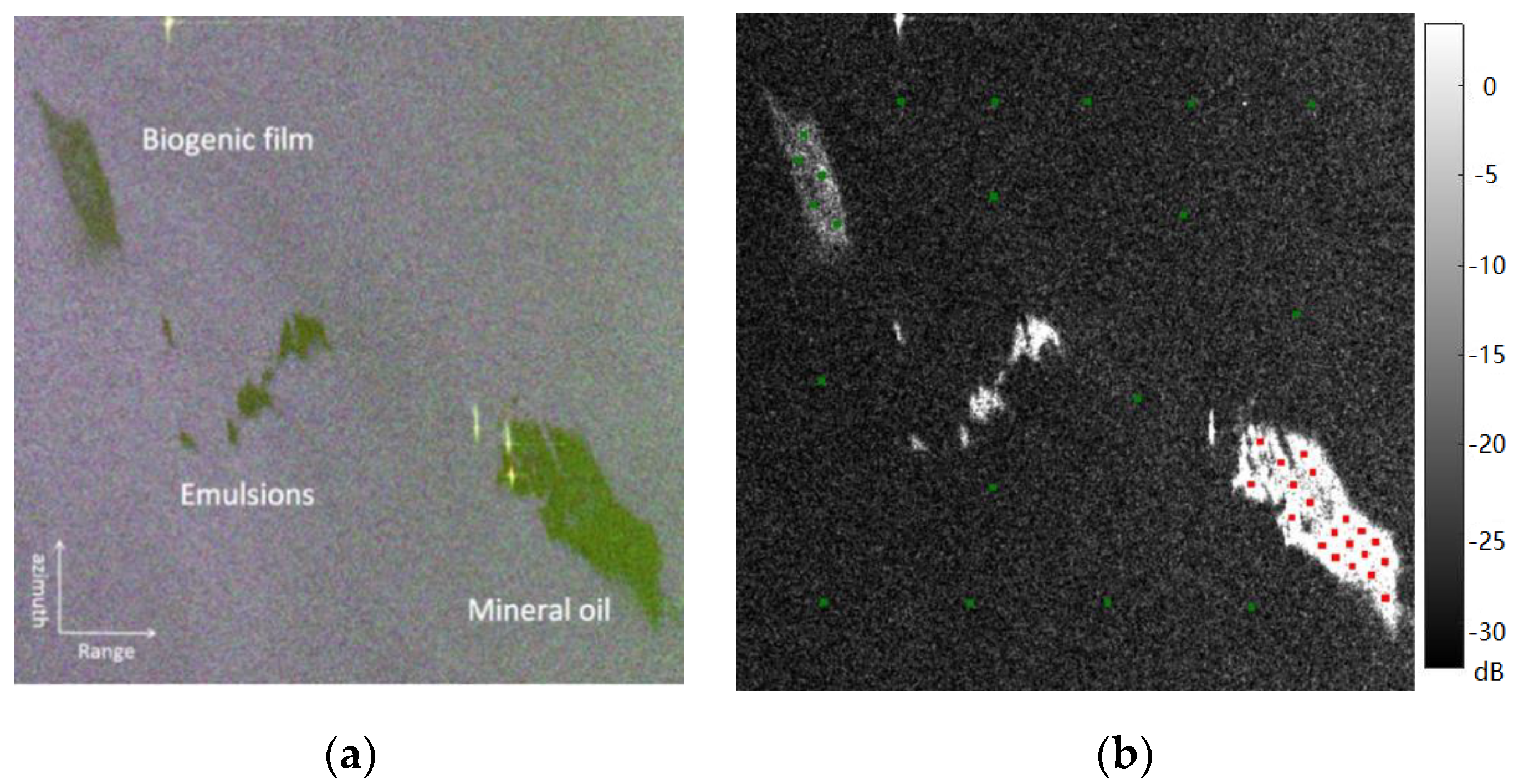
3.1. Study Site and SAR Image
3.2. Oil Spill Detection Experiments
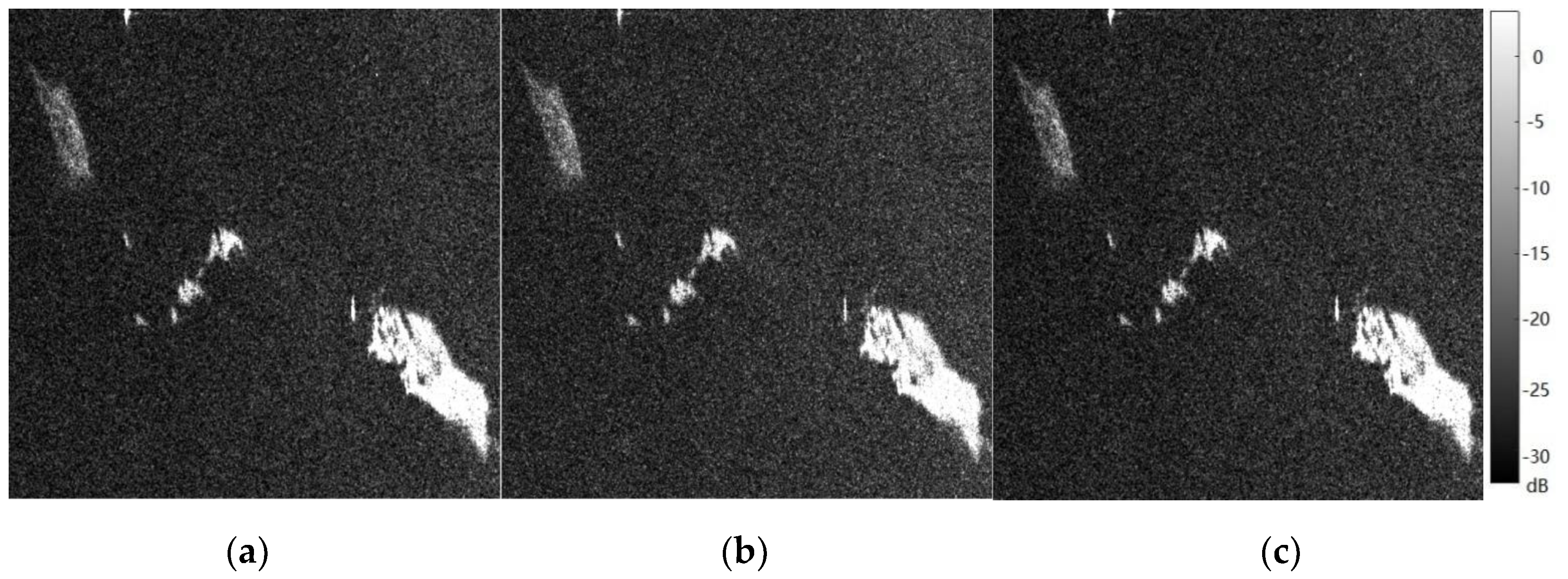
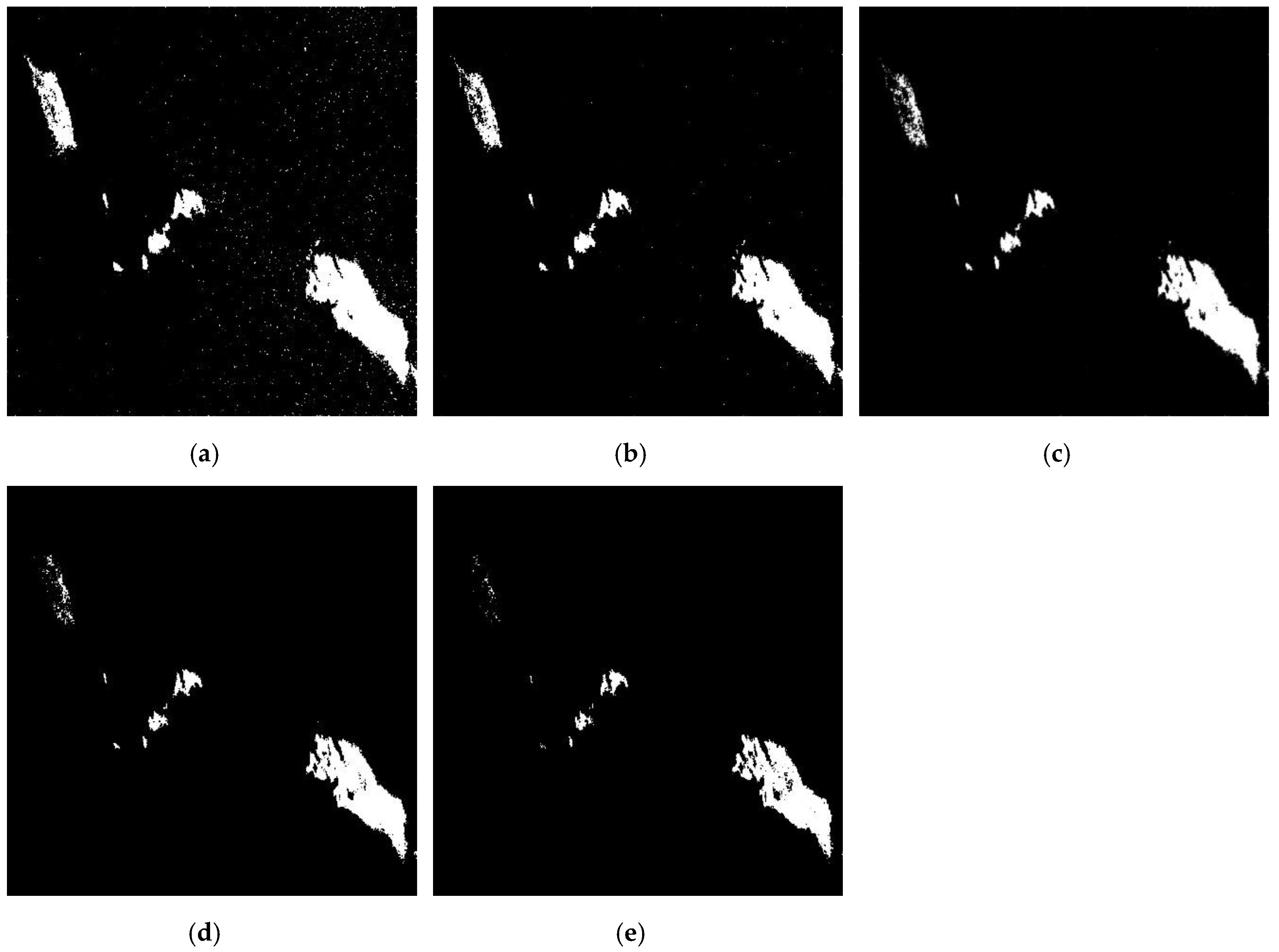
3.2.1. Comparison of Polarimetric SAR Filters
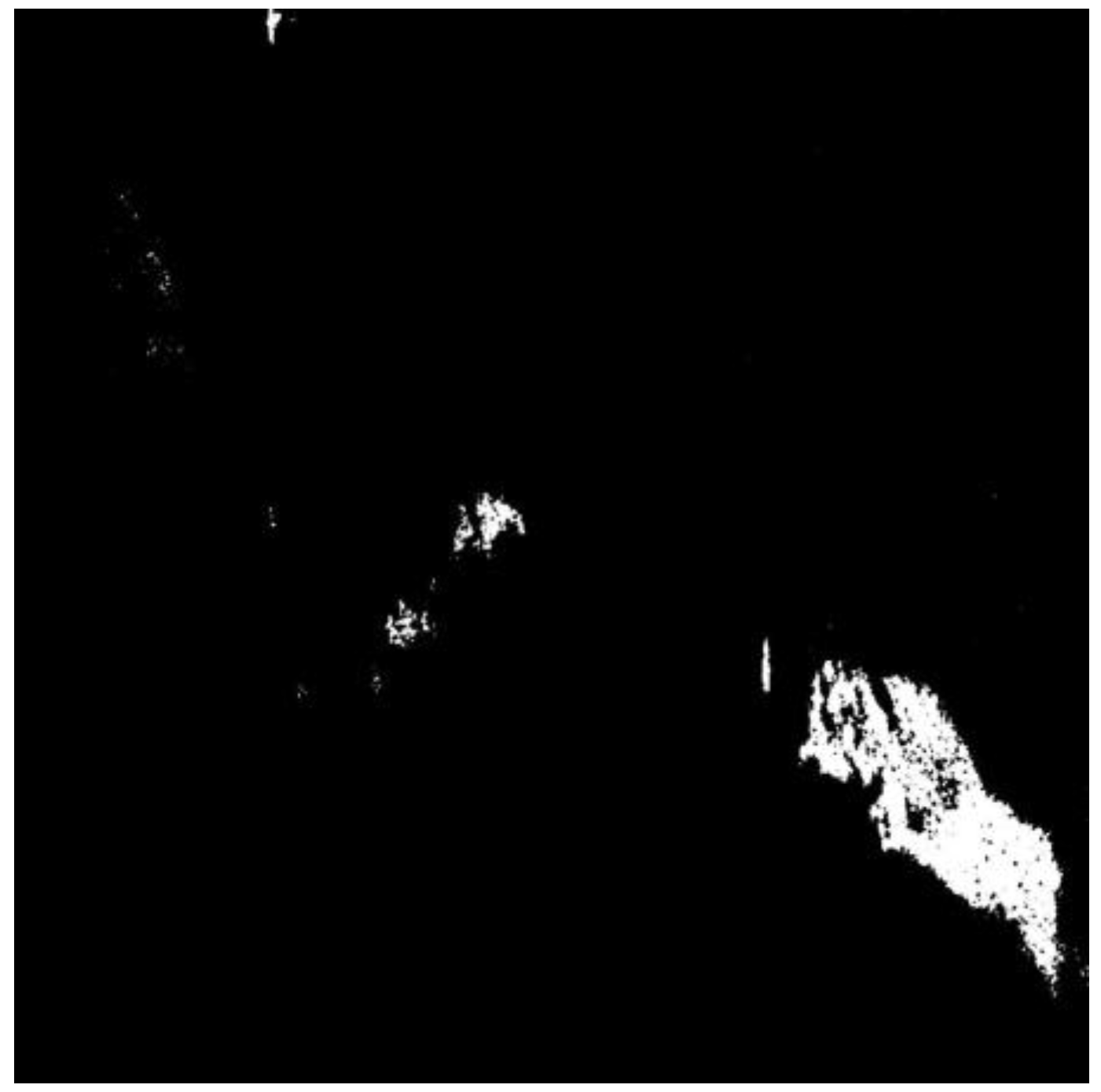
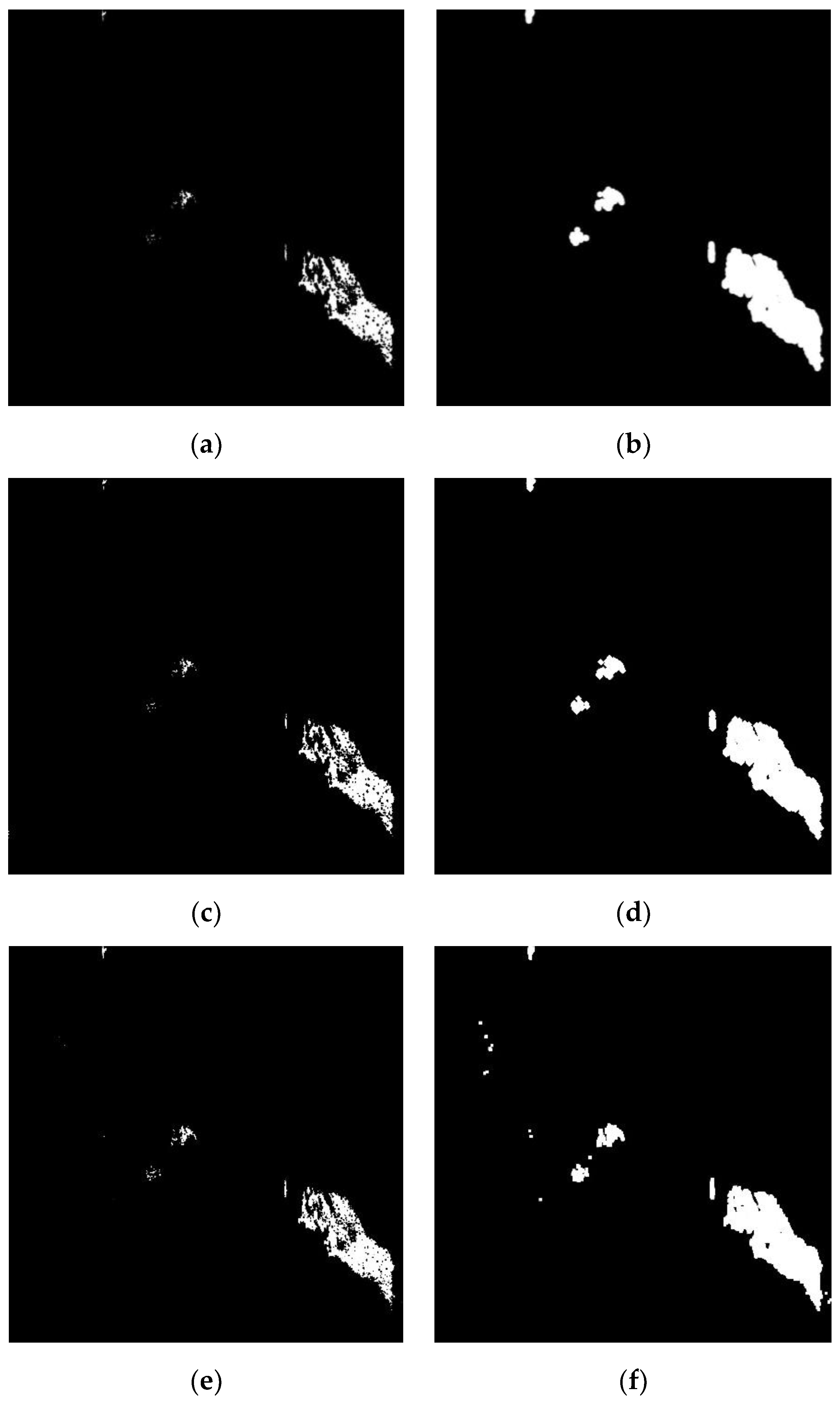
3.2.2. Optimization of Post-Processing Procedures
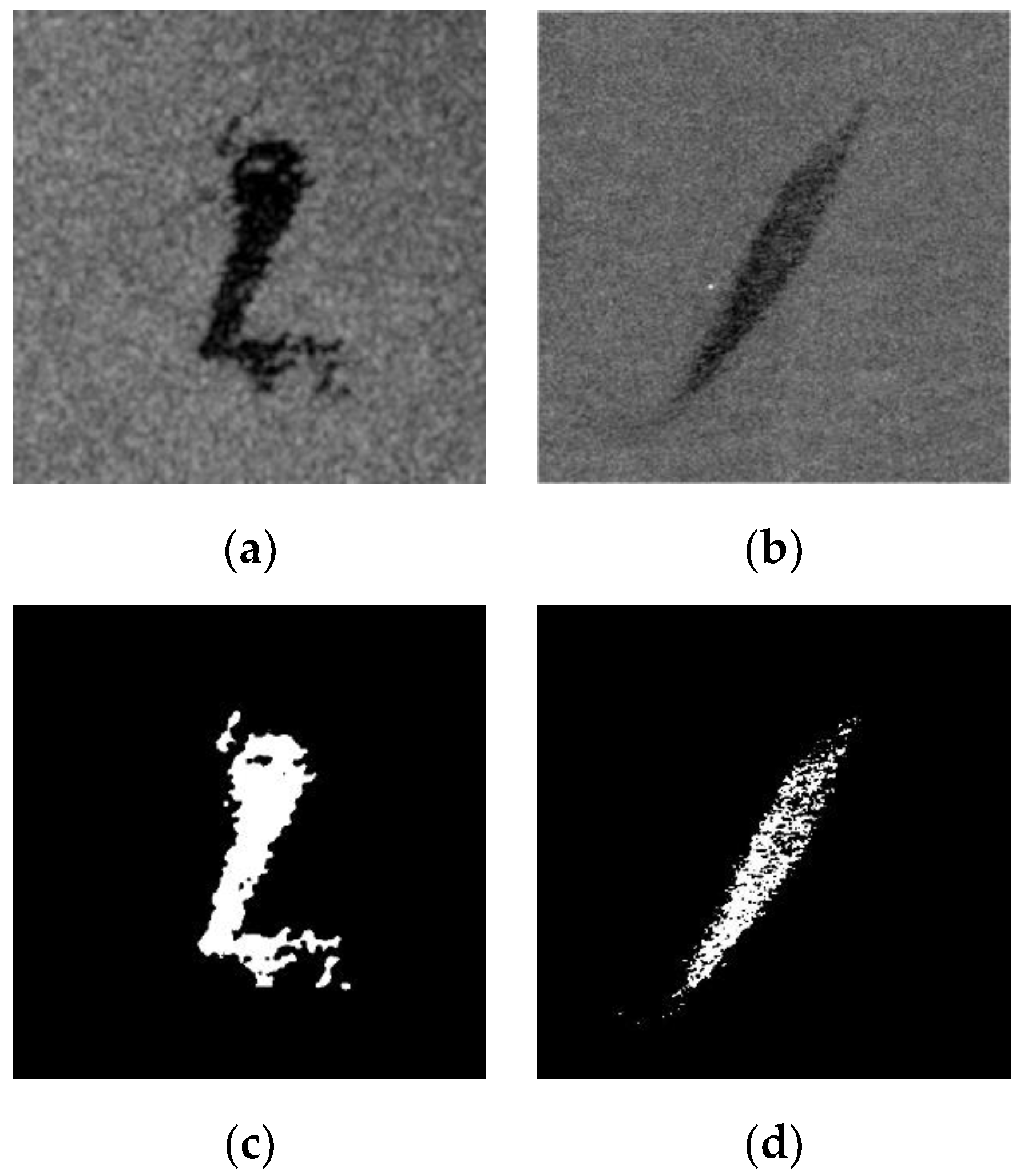
Spacial Density Thresholding (SDT) on VV2 Power Image
Morphological Processing on Classification Result by Polarimetric SAR Features
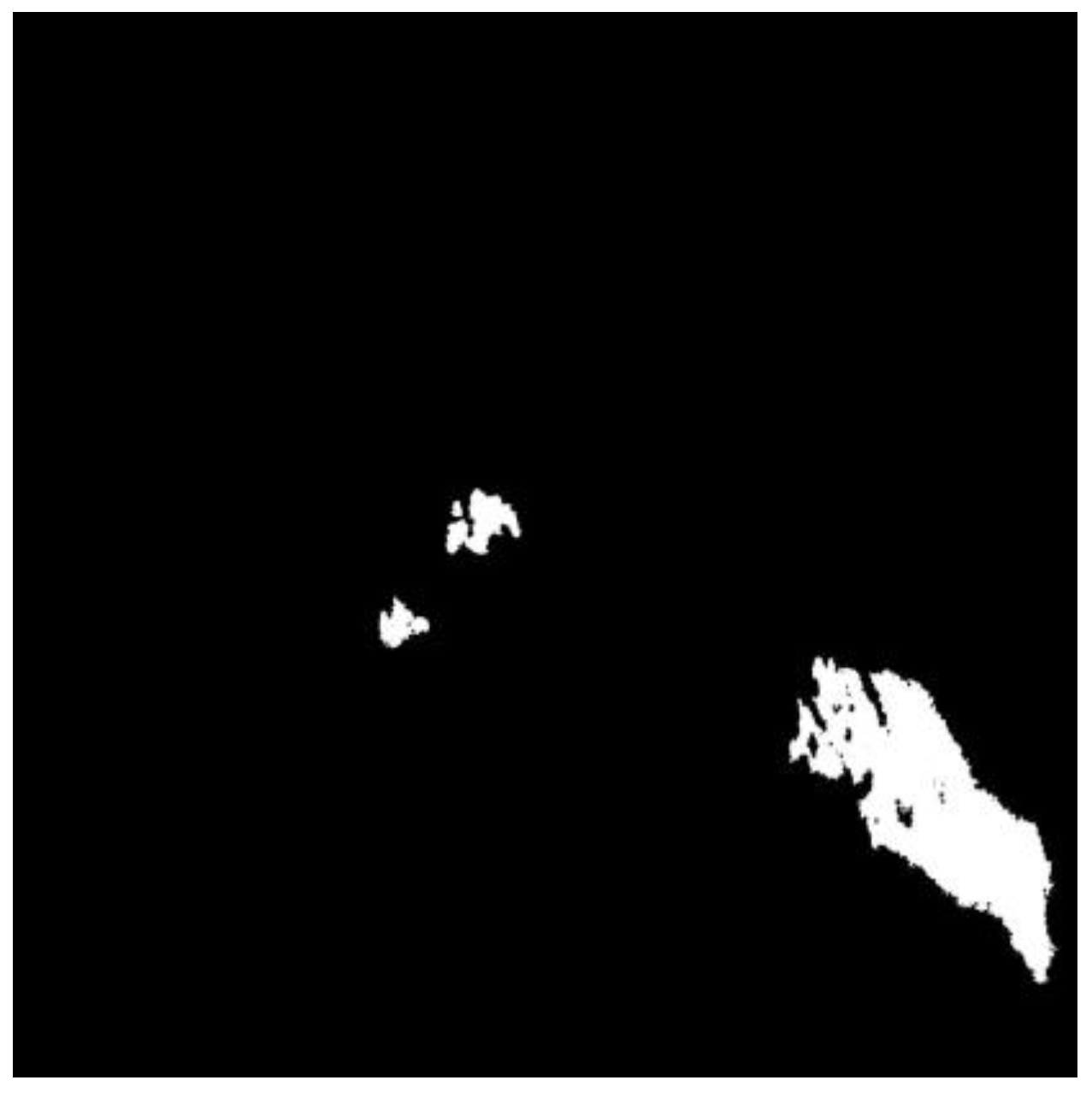
None Crude Oil Spill Masking
4. Discussion
5. Conclusions
- (1)
- By using model-based polarimetric filter, the speckle noise can be effectively suppressed;
- (2)
- By using SAE, the deep neural network is efficiently established given limited data samples;
- (3)
- By using a post-processing step, the intact oil slick piece with high confidence level can be obtained.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fingas, M.; Brown, C. Review of oil spill remote sensing. Mar. Pollut. Bull. 2014, 83, 9–23. [Google Scholar] [CrossRef] [PubMed]
- Brekke, C.; Solberg, A.H.S. Oil spill detection by satellite remote sensing—Review. Remote Sens. Environ. 2005, 95, 1–13. [Google Scholar] [CrossRef]
- Alves, T.M.; Kokinou, E.; Zodiatis, G. A three-step model to assess shoreline and offshore susceptibility to oil spills: The South Aegean (Crete) as an analogue for confined marine basins. Mar. Pollut. Bull. 2014, 86, 443–457. [Google Scholar] [CrossRef] [PubMed]
- Alves, T.M.; Kokinou, E.; Zodiatis, G.; Radhakrishnan, H.; Panagiotakis, C.; Lardner, R. Multidisciplinary oil spill modelling to protect coastal communities and the environment of the Eastern Mediterranean Sea. Sci. Rep. 2016, 6, 36882. [Google Scholar] [CrossRef] [PubMed]
- Alves, T.M.; Kokinou, E.; Zodiatis, G.; Lardner, R.; Panagiotakis, C.; Radhakrishnan, H. Modelling of oil spills in confined maritime basins: The case for early response in the Eastern Mediterranean Sea. Environ. Pollut. 2015, 206, 390–399. [Google Scholar] [CrossRef] [PubMed]
- Solberg, A.H.S. Remote sensing of ocean oil-spill pollution. Proc. IEEE 2012, 100, 2931–2945. [Google Scholar] [CrossRef]
- Chen, J.; Quegan, S. Calibration of Spaceborne CTLR Compact Polarimetric Low-Frequency SAR Using Mixed Radar Calibrators. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2712–2723. [Google Scholar] [CrossRef]
- Alpers, W.; Huhnerfuss, H. The damping of the ocean waves by surface films: A new look at an old problem. J. Geophys. Res. 1989, 94, 6251–6265. [Google Scholar] [CrossRef]
- Marangoni, C. Sul principio della viscosith superficiale dei liquidi stabili. Nuovo Cim. 1872, 5, 239–273. [Google Scholar]
- Del Frate, F.; Petrocchi, A.; Lichtenegger, J.; Calabresi, G. Neural networks for oil spill detection using ERS-SAR data. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2282–2287. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, Y.; Chen, J.; Zhang, H. Improved compact polarimetric SAR Quad-Pol reconstruction algorithm for oil spill detection. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1139–1142. [Google Scholar] [CrossRef]
- Li, Y.; Lin, H.; Zhang, Y.; Chen, J. Comparisons of circular transmit and linear receive compact polarimetric SAR features for oil slicks discrimination. J. Sens. 2015, 2015, 631561. [Google Scholar] [CrossRef]
- Migliaccio, M.; Gambardella, A.; Tranfaglia, M. SAR polarimetry to observe oil spills. IEEE Trans. Geosci. Remote Sens. 2007, 45, 506–511. [Google Scholar] [CrossRef]
- Migliaccio, M.; Nunziata, F.; Gambardella, A. On the co-polarized phase difference for oil spill observation. Int. J. Remote Sens. 2009, 30, 1587–1602. [Google Scholar] [CrossRef]
- Buono, A.; Nunziata, F.; Migliaccio, M.; Li, X. Polarimetric analysis of compact-polarimetry SAR architectures for sea oil slick observation. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5862–5874. [Google Scholar] [CrossRef]
- Nunziata, F.; Gambardella, A.; Migliaccio, M. On the Mueller scattering matrix for SAR sea oil slick observation. IEEE Geosci. Remote Sens. Lett. 2008, 5, 691–695. [Google Scholar] [CrossRef]
- Zhang, Y.; Lin, H.; Liu, Q.; Hu, J.; Li, X.; Yeung, K. Oil-Spill monitoring in the coastal waters of Hong Kong and vicinity. Mar. Geod. 2012, 35, 93–106. [Google Scholar] [CrossRef]
- Minchew, B.; Jones, C.E.; Holt, B. Polarimetric analysis of backscatter from the Deep Water Horizon oil spill using L-Band Synthetic Aperture Radar. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3812–3830. [Google Scholar] [CrossRef]
- Lee, J.-S.; Grunes, M.R.; de Grandi, G. Polarimetric SAR speckle filtering and its implication for classification. IEEE Trans. Geosci. Remote Sens. 1999, 37, 2363–2373. [Google Scholar]
- Lopez-Martinez, C.; Fabregas, X. Model-Based Polarimetric SAR Speckle Filter. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3894–3907. [Google Scholar] [CrossRef]
- Chen, G.; Li, Y.; Sun, G.; Zhang, Y. Application of deep networks to oil spill detection using polarimetric Synthetic Aperture Radar Images. Appl. Sci. 2017, 7, 968. [Google Scholar] [CrossRef]
- Bengio, Y.; Lamblin, P.; Popovici, D.; Larochelle, H. Greedy Layer-Wise Training of Deep Networks. In Advances in Neural Information Processing Systems 19 (NIPS’06); MIT Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Shu, Y.; Li, J.; Yousif, H.; Gomes, G. Dark-spot detection from SAR intensity imagery with spatial density thresholding for oil-spill monitoring. Remote Sens. Environ. 2010, 114, 2026–2035. [Google Scholar] [CrossRef]
- Skrunes, S.; Brekke, C.; Eltoft, T.; Kudryavtsev, V. Comparing near coincident C- and X-band SAR acquisitions of marine oil spills. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1958–1975. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | Definition | For Crude Oil | For Biogenic Slicks | For Clean Sea Surface |
|---|---|---|---|---|
| VV intensity | Lower | low | High | |
| Entropy (H) | , | High | Low | Lower |
| Alpha (α) | High | Low | Lower | |
| The degree of Polarization (DoP) | Low | High | High | |
| Ellipticity () | Positive | Negative | Negative | |
| Pedestal Height (PH) | High | Low | Lower | |
| Standard Deviation of CPD | High | Low | Lower | |
| Conformity Coefficient (Conf. Co.) | Negative | Positive | Positive | |
| Correlation Coefficient (Corr. Co.) | Low | High | Higher | |
| Coherence Coefficient (Coh. Co.) | Low | High | Higher |
| Parameters | Configurations |
|---|---|
| Sensor | RadarSAT-2 |
| Acquisition mode | Quad-polarization: HH, HV, VH, VV |
| Incidence angle | 34.5°–36.1° |
| Special resolution | Range: around 4.7; Azimuth: 4.8 meters |
| Acquisition time | 8th June 2011 UTC, 17:27 |
| Location | 59°59′ N, 2°27′ E |
| Confusion Matrix | Crude Oil (Truth) | Biogenic Slicks and CLEAN Sea Surface (Truth) | Total |
|---|---|---|---|
| Crude oil (Classification) | 1604 | 9 | 1613 |
| Biogenic slicks and Clean sea surface (Classification) | 15 | 1572 | 1587 |
| Total | 1619 | 1581 | 3200 |
| Confusion Matrix | Crude Oil (Truth) | Biogenic Slicks and Clean Sea Surface (Truth) | Total |
|---|---|---|---|
| Crude oil (Classification) | 1593 | 21 | 1614 |
| Biogenic slicks and Clean sea surface (Classification) | 25 | 1561 | 1586 |
| Total | 1618 | 1582 | 3200 |
| Confusion Matrix | Crude Oil (Truth) | Biogenic Slicks and Clean Sea Surface (Truth) | Total |
|---|---|---|---|
| Crude oil (Classification) | 1589 | 5 | 1594 |
| Biogenic slicks and Clean sea surface (Classification) | 16 | 1590 | 1606 |
| Total | 1605 | 1505 | 3200 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Zhang, Y.; Yuan, Z.; Guo, H.; Pan, H.; Guo, J. Marine Oil Spill Detection Based on the Comprehensive Use of Polarimetric SAR Data. Sustainability 2018, 10, 4408. https://doi.org/10.3390/su10124408
Li Y, Zhang Y, Yuan Z, Guo H, Pan H, Guo J. Marine Oil Spill Detection Based on the Comprehensive Use of Polarimetric SAR Data. Sustainability. 2018; 10(12):4408. https://doi.org/10.3390/su10124408
Chicago/Turabian StyleLi, Yu, Yuanzhi Zhang, Zifeng Yuan, Huaqiu Guo, Hongyuan Pan, and Jingjing Guo. 2018. "Marine Oil Spill Detection Based on the Comprehensive Use of Polarimetric SAR Data" Sustainability 10, no. 12: 4408. https://doi.org/10.3390/su10124408
APA StyleLi, Y., Zhang, Y., Yuan, Z., Guo, H., Pan, H., & Guo, J. (2018). Marine Oil Spill Detection Based on the Comprehensive Use of Polarimetric SAR Data. Sustainability, 10(12), 4408. https://doi.org/10.3390/su10124408