
Study on Lane-Change Replanning and Trajectory Tracking for Intelligent Vehicles Based on Model Predictive Control


Abstract
:1. Introduction
2. Intelligent Vehicle Lane-Change Trajectory Planning
3. Lane-Change Replanning Based on Model Predictive Control
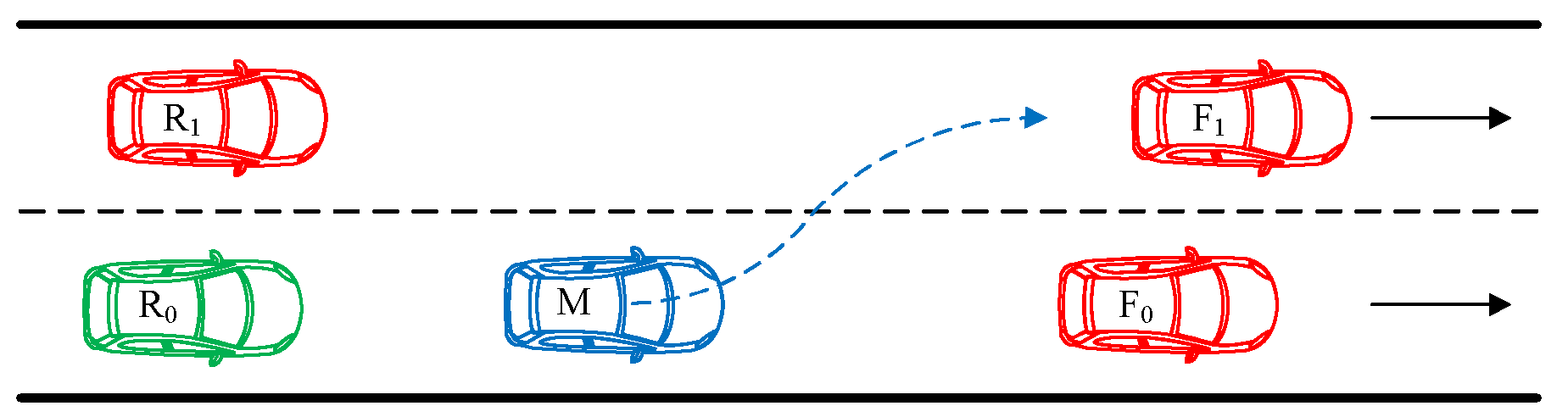
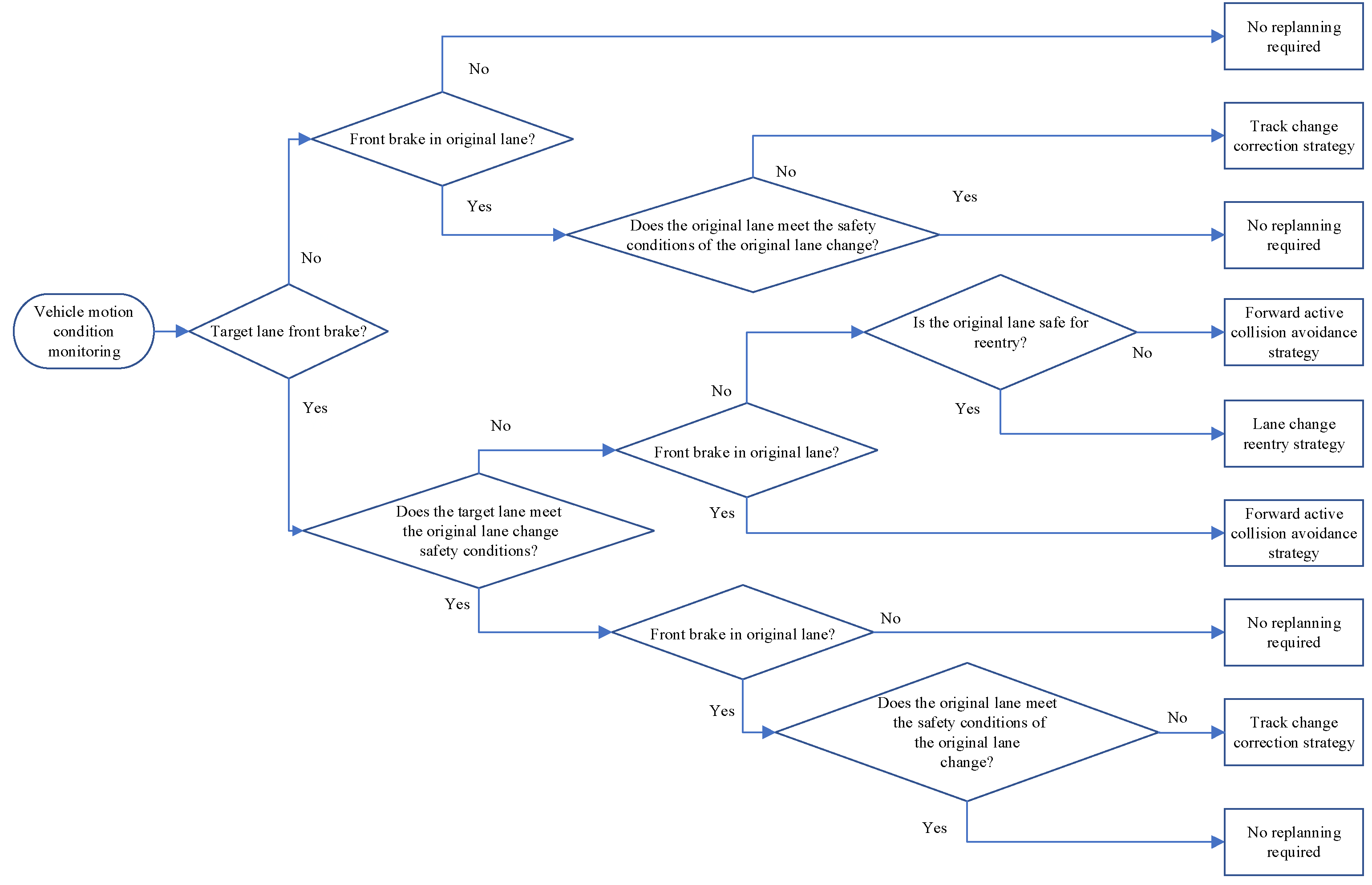
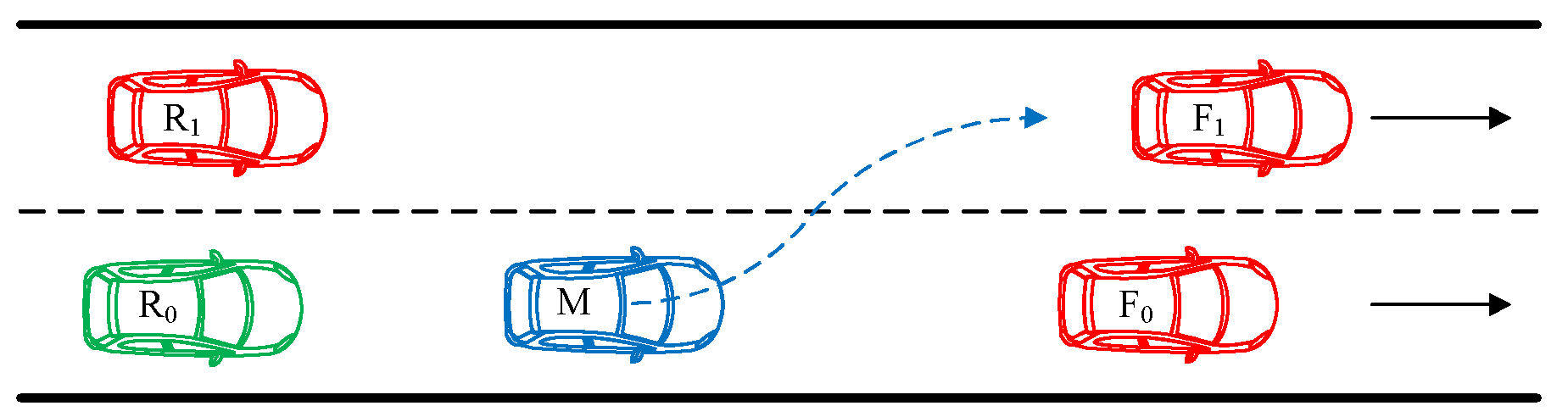
3.1. Lane-Change Replanning Strategy
- (1)
- F0 is braking and the state of F1 is unchanged.
- (2)
- The state of F0 is unchanged and F1 is braking.
- (3)
- F0 and F1 are braking.
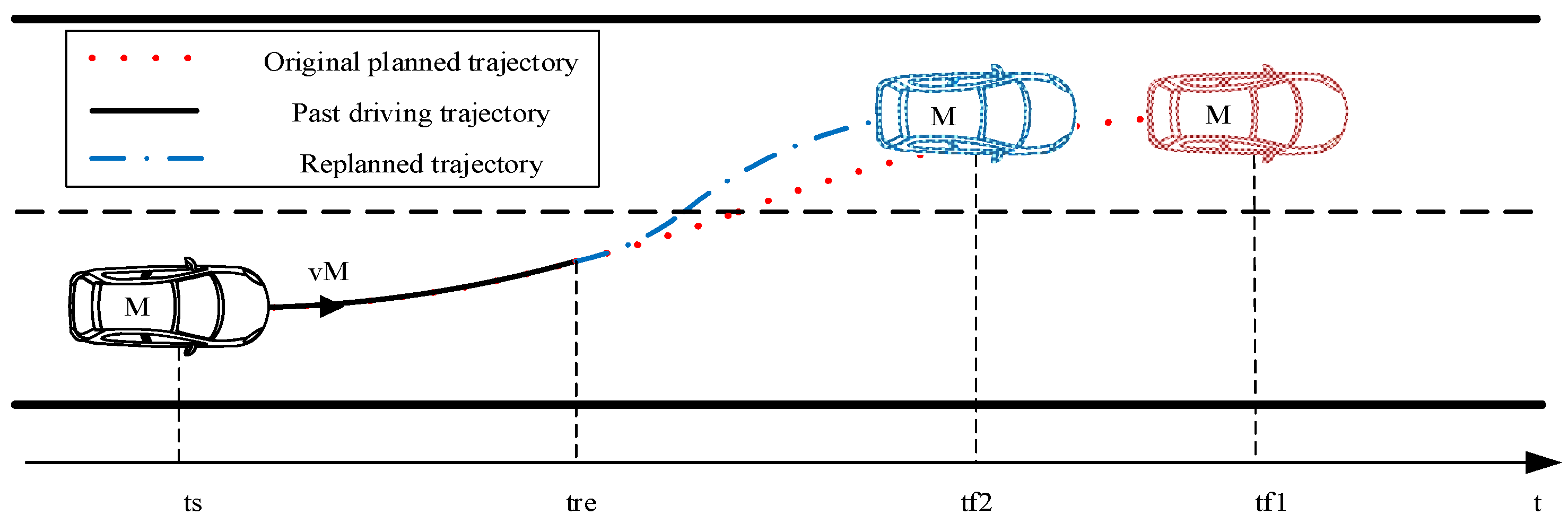
3.2. Lane-Change Trajectory Correction Based on MPC
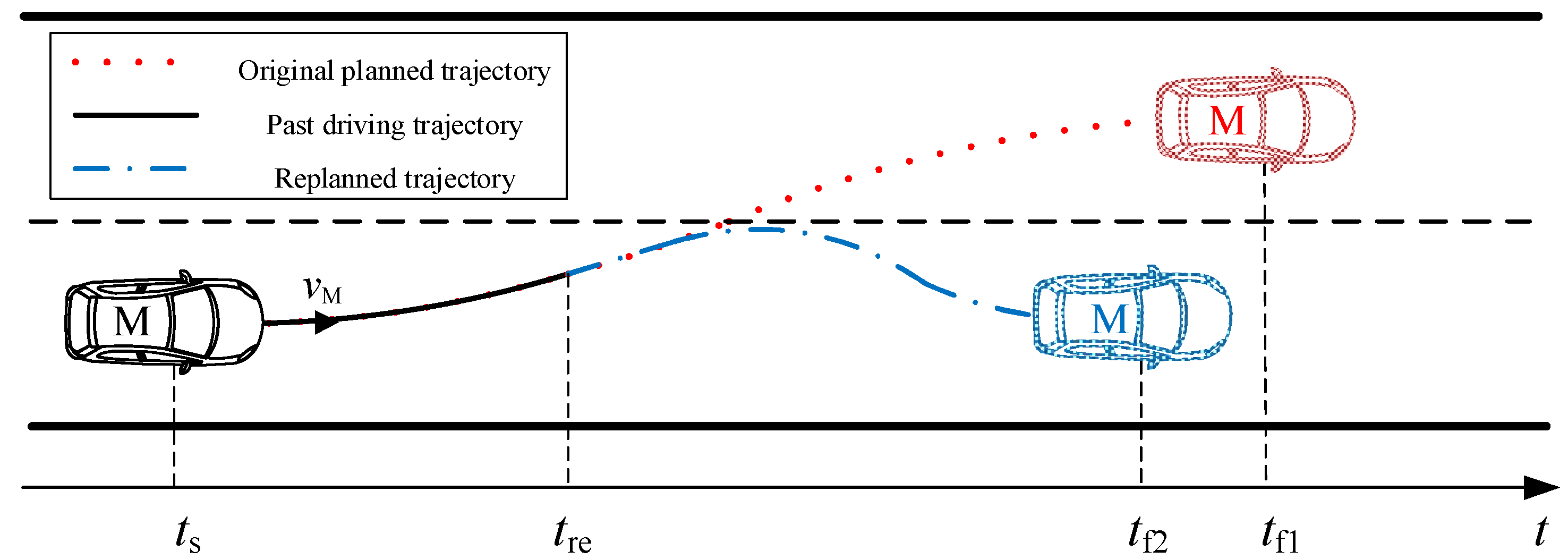
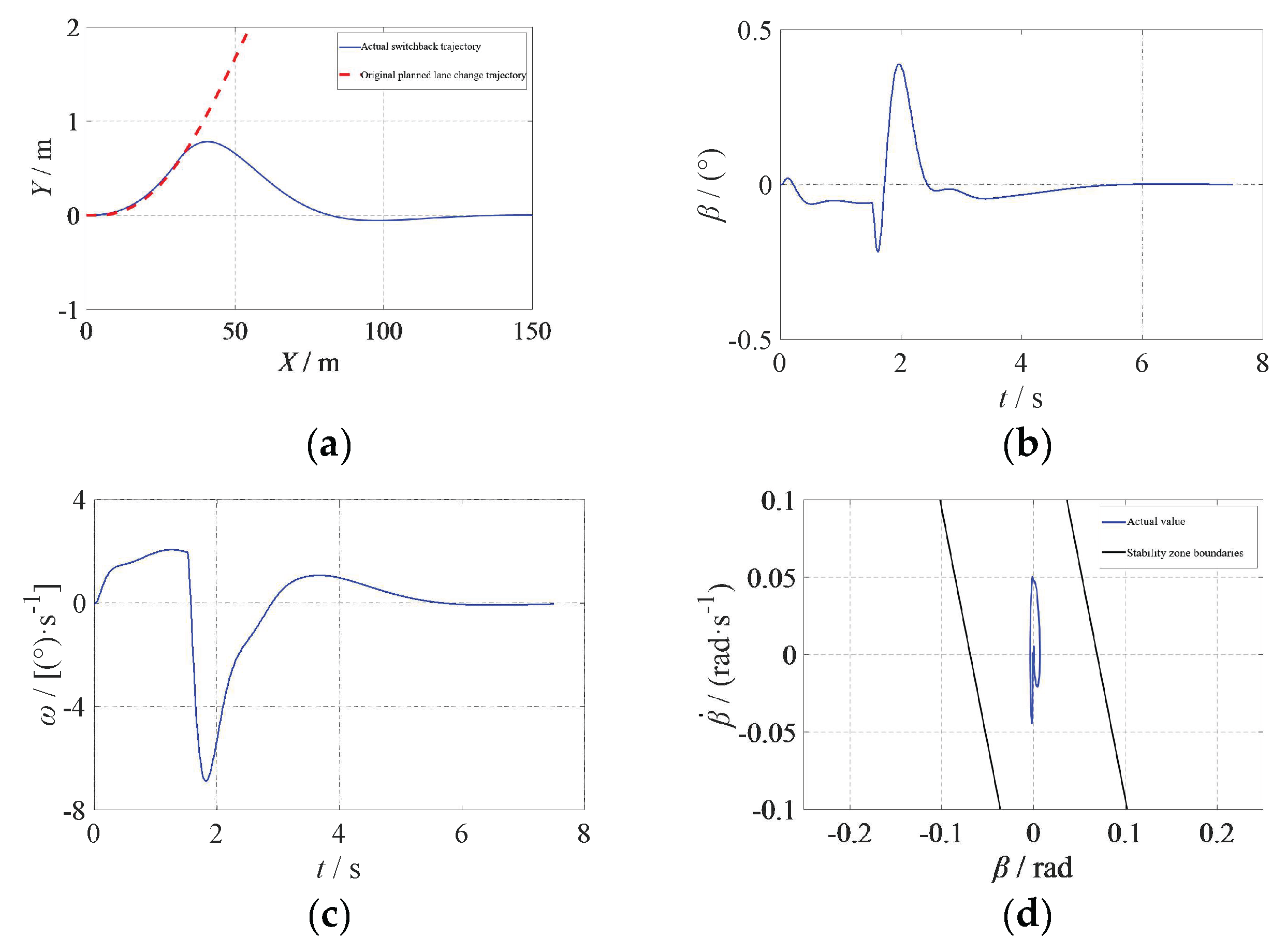
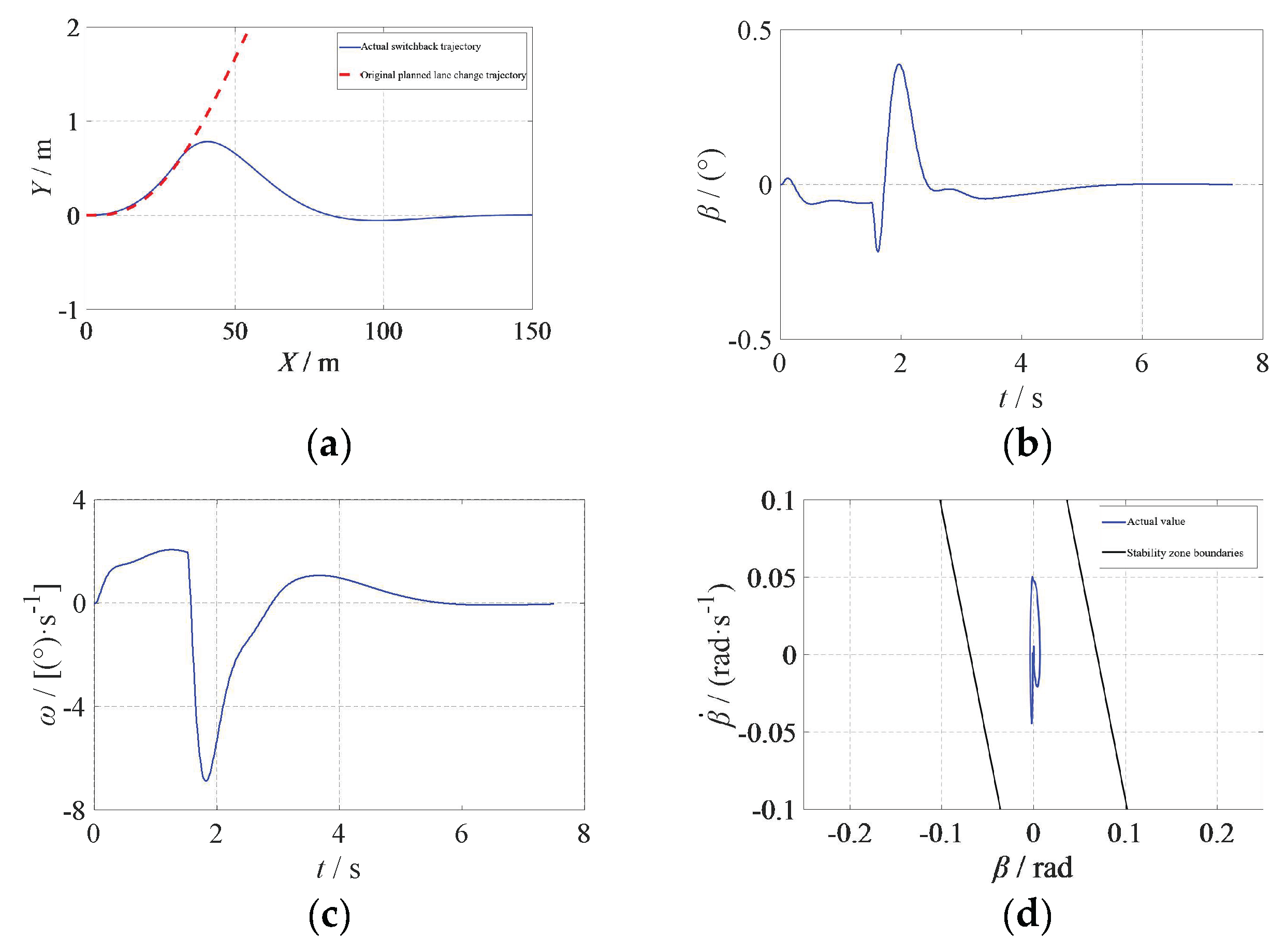
3.3. Changing Lanes and Turning Back Based on MPC
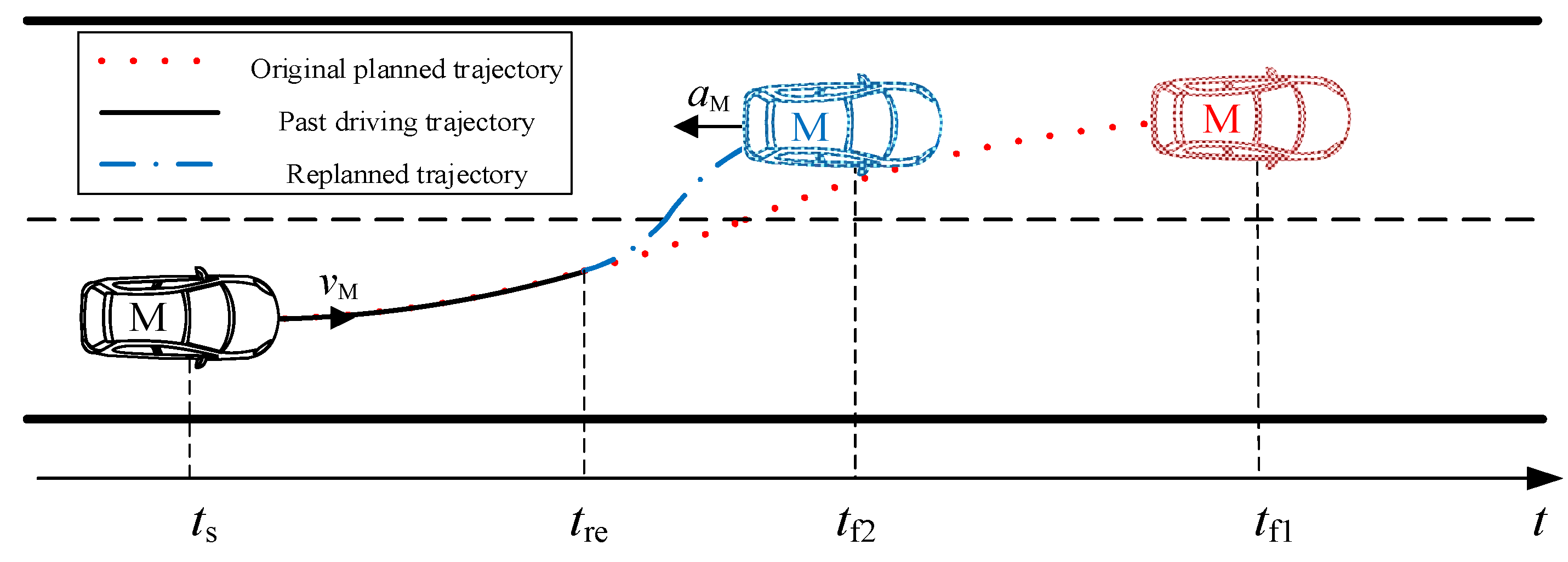
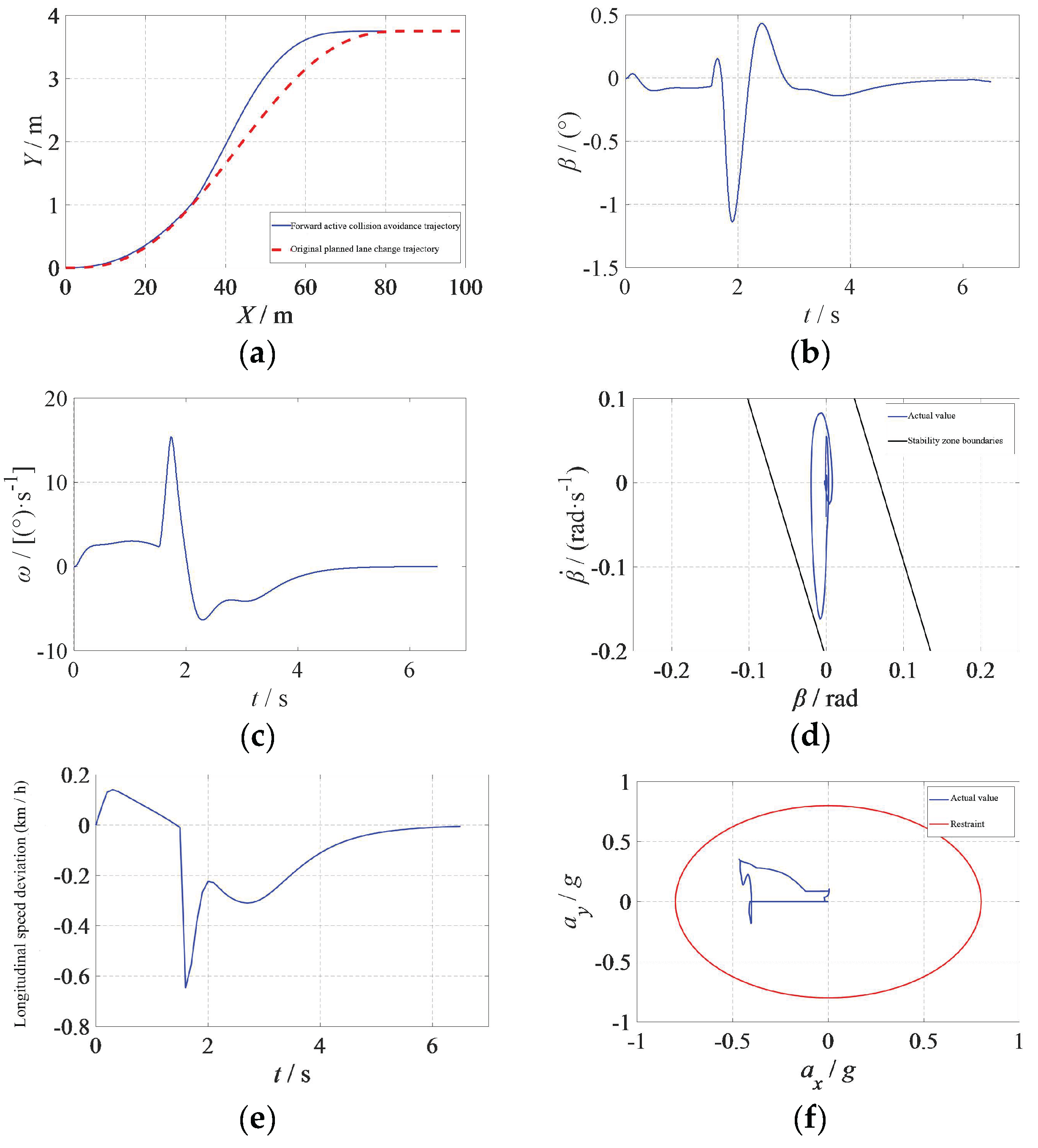
3.4. Forward Active Collision Avoidance Based on MPC
4. Trajectory Tracking Based on Model Predictive Control
4.1. Lateral Motion Controller Based on MPC
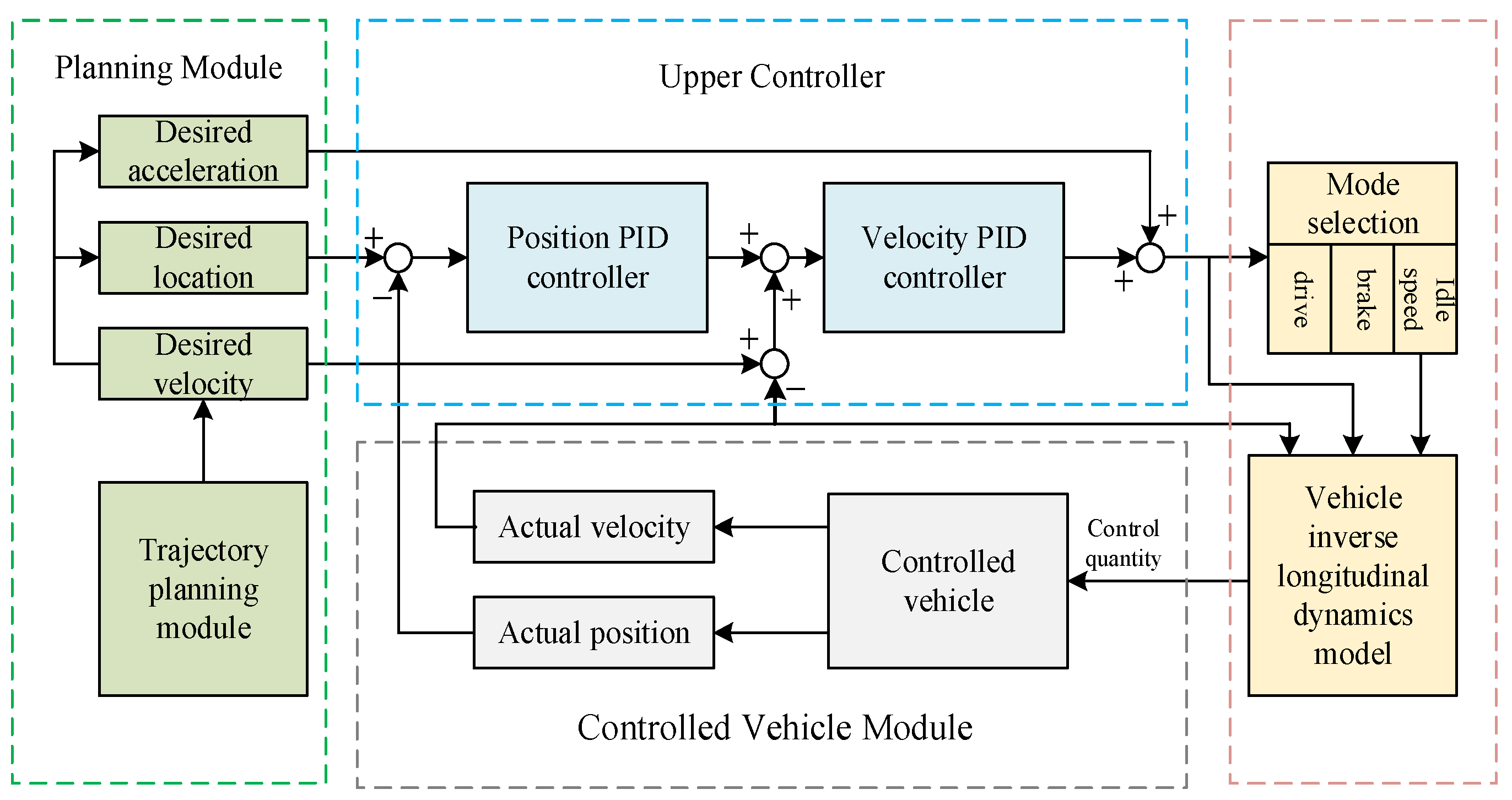
4.2. Longitudinal Motion Controller Based on Double PID
4.3. Integrated Lateral and Longitudinal Controller
5. Integrated Simulation Verification
5.1. Lane-Change Trajectory Correction Verification
5.2. Lane-Change Turnback Verification
5.2.1. No Risk of Collision in the Original Lane
5.2.2. Original Lane at Risk of Collision
5.3. Forward Active Collision Avoidance Verification
6. Conclusions
- (1)
- In an intelligent vehicle lane-change process, other traffic vehicles’ driving state changing will increase the risk of collision, so there is a need to carry out lane-change replanning. According to different traffic conditions, lane-change replanning is carried out for lane-change trajectory correction, lane-change turnback and forward active collision avoidance operation. All three operation strategies were implemented based on model predictive control, and different objective functions were designed according to the specific requirements of different strategies to obtain the optimal control volume under different working conditions, and the replanning trajectory was fitted based on the quintuple polynomial, which was input to the trajectory tracking control module, and the optimal control value continued to be solved at the next replanning moment to achieve rolling replanning.
- (2)
- We established a lateral controller based on model predictive control and on the three-degrees-of-freedom model of the vehicle. We also established a vehicle longitudinal motion controller based on double PID. Taking the longitudinal vehicle velocity as the joint point and adding constraints, we established an integrated lateral and longitudinal controller for the whole vehicle to achieve accurate tracking of the reference trajectory.
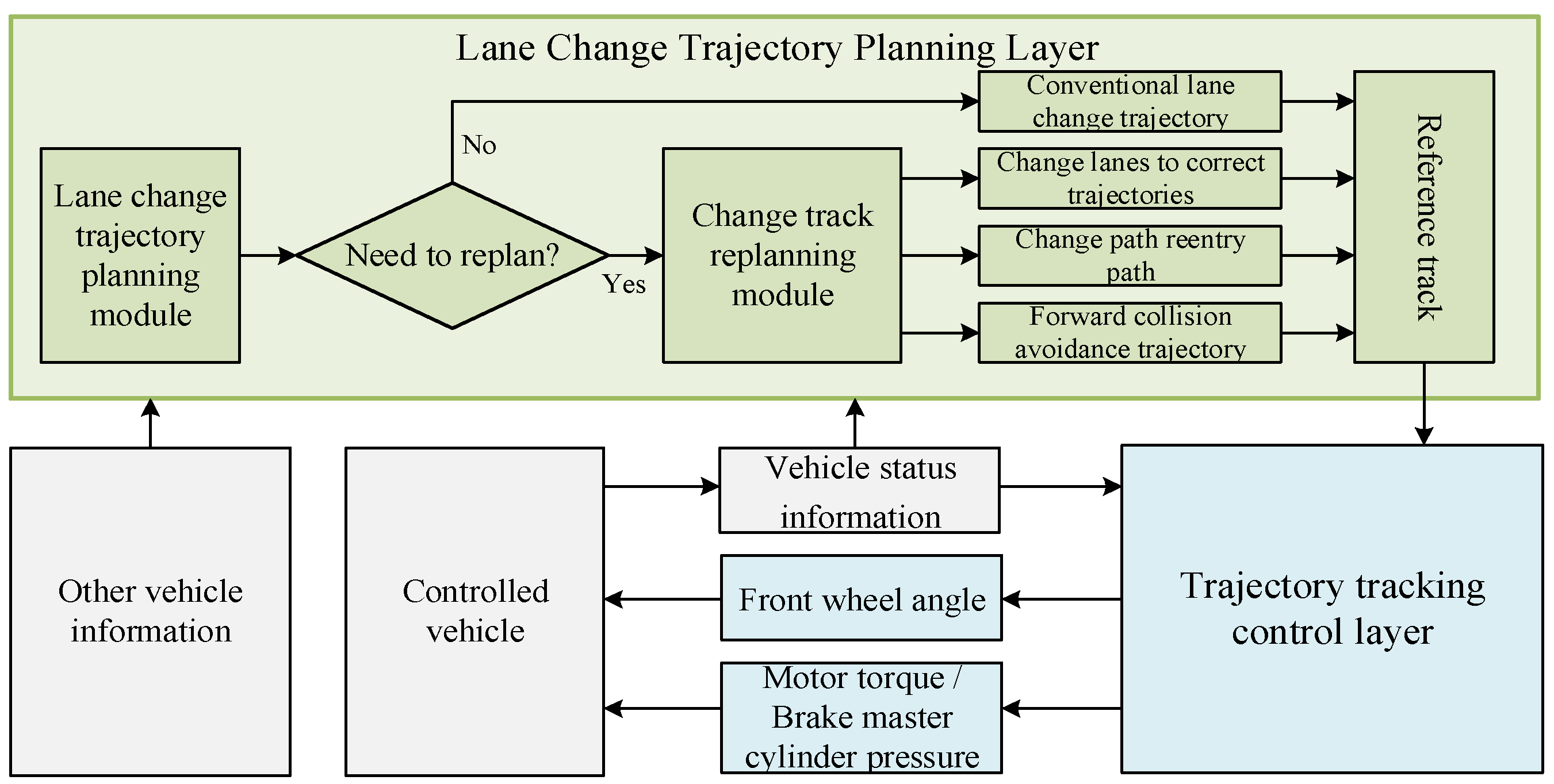
- (3)
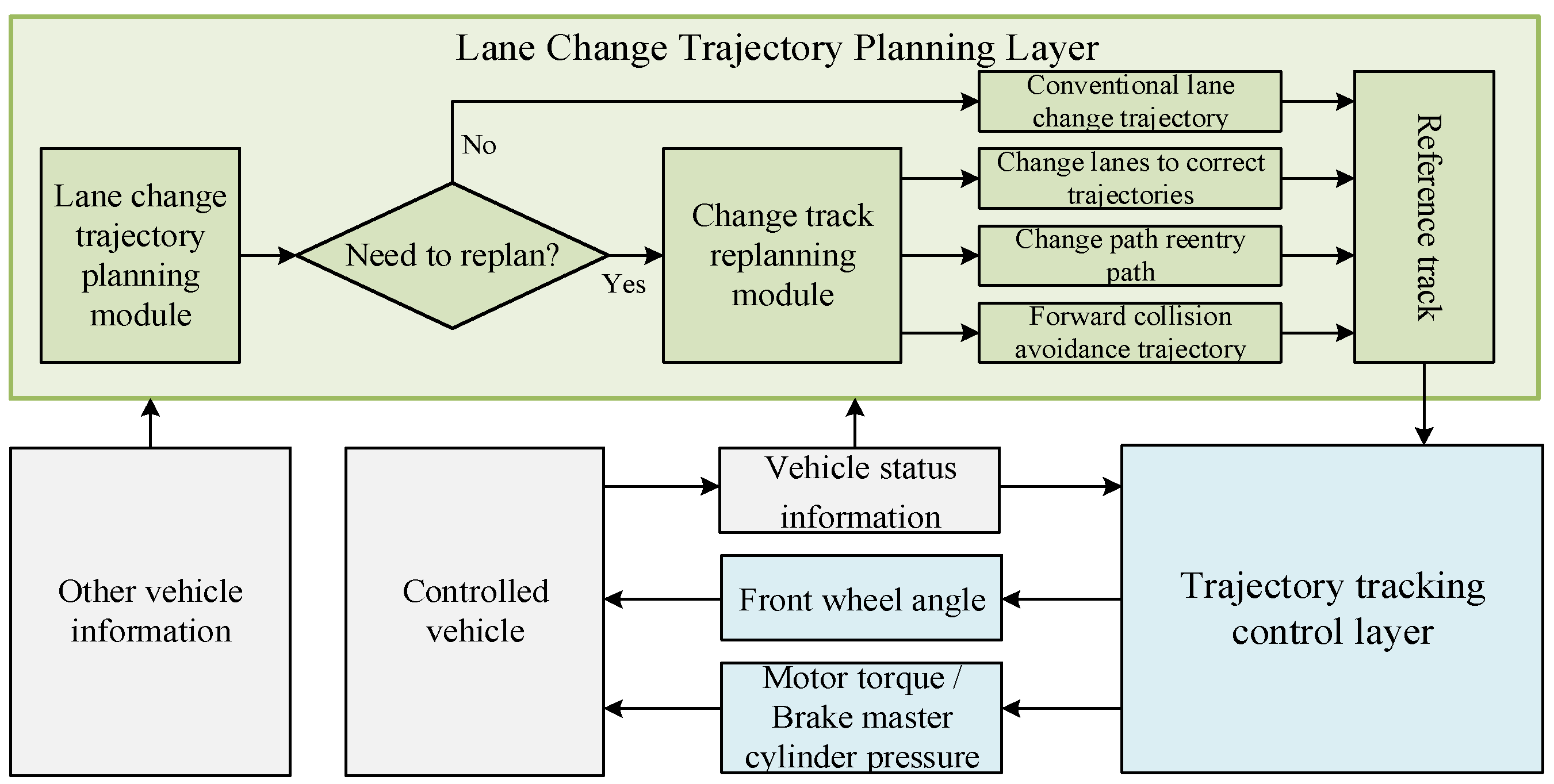
- We designed an integrated controller which contained a lane-change trajectory planning layer and trajectory tracking control layer. The upper layer of the integrated controller carried out the trajectory planning based on the quintuple polynomial and the trajectory replanning based on MPC; the lower layer of the integrated controller consisted of the vehicle lateral motion controller based on MPC and the vehicle longitudinal motion controller based on double PID. The joint simulation results showed that the trajectory replanning strategy can achieve vehicle collision avoidance in the corresponding scenario while ensuring the driving stability of the vehicle, and the trajectory tracking layer can achieve accurate tracking of the conventional lane-change trajectory while ensuring good driving stability and driving comfort.
- (4)
- The lane-change scenarios studied in this paper were based on a design with same-direction dual lanes, and certain idealization assumptions were made; the driving environment faced by vehicles in actual traffic scenarios will be more complex, for example, the scenario where vehicles in other lanes cut into the lane in question. Further research will continue to improve the lane-change trajectory planning strategy so that it can adapt to more complex traffic conditions.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gonzalez, D.; Perez, J.; Milanes, V.; Nashashibi, F. A Review of Motion Planning Techniques for Automated Vehicles. IEEE Trans. Intell. Transp. Syst. 2015, 17, 1135–1145. [Google Scholar] [CrossRef]
- Hoang, V.D.; Seo, D.; Kurnianggoro, L.; Jo, K.H. Path planning and global trajectory tracking control assistance to autonomous vehicle. In Proceedings of the 2014 11th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Kuala Lumpur, Malaysia, 12–15 November 2014; pp. 646–650. [Google Scholar]
- Li, Y.H.; Liu, Y.; Feng, Q.L.; Nan, Y.F.; He, J.; Fan, J.K. Path tracking control for an intelligent commercial vehicle based on optimal preview and model predictive. J. Automot. Safety Energy 2020, 11, 462–469. (In Chinese) [Google Scholar]
- Liu, M.; Zhao, F.; Yin, J.; Niu, J.; Liu, Y. Reinforcement-Tracking: An Effective Trajectory Tracking and Navigation Method for Autonomous Urban Driving. IEEE Trans. Intell. Transp. Syst. 2021, 23, 6991–7007. [Google Scholar] [CrossRef]
- Wang, C.; Du, Y. Lane-Changing Strategy Based on a Novel Sliding Mode Control Approach for Connected Automated Vehicles. Appl. Sci. 2022, 12, 11000. [Google Scholar] [CrossRef]
- An, H.Y.; Choi, W.S.; Choi, S.G. Real-Time Path Planning for Trajectory Control in Autonomous Driving. In Proceedings of the 2022 24th International Conference on Advanced Communication Technology (ICACT), PyeongChang, Republic of Korea, 13–16 February 2022; pp. 154–159. [Google Scholar]
- Corno, M.; Gimondi, A.; Panzani, G.; Roselli, F.; Alessandretti, A.; Savaresi, S.M. A Non-Optimization-Based Dynamic Path Planning for Autonomous Obstacle Avoidance. IEEE Trans. Control. Syst. Technol. 2022, 31, 722–734. [Google Scholar] [CrossRef]
- Leon, F.; Gavrilescu, M. A Review of Tracking and Trajectory Prediction Methods for Autonomous Driving. Mathematics 2021, 9, 660. [Google Scholar] [CrossRef]
- Gao, L.; Beal, C.; Mitrovich, J.; Brennan, S. Vehicle model predictive trajectory tracking control with curvature and friction preview. IFAC PapersOnLine 2022, 55, 221–226. [Google Scholar] [CrossRef]
- Li, H.; Wu, C.; Chu, D.; Lu, L.; Cheng, K. Combined Trajectory Planning and Tracking for Autonomous Vehicle Considering Driving Styles. IEEE Access 2021, 9, 9453–9463. [Google Scholar] [CrossRef]
- Yuan, T.; Zhao, R. LQR-MPC-Based Trajectory-Tracking Controller of Autonomous Vehicle Subject to Coupling Effects and Driving State Uncertainties. Sensors 2022, 22, 5556. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Fan, J.; Liu, Y.; Wang, X. Path Planning and Path Tracking for Autonomous Vehicle Based on MPC with Adaptive Dual-Horizon-Parameters. Int. J. Automot. Technol. 2022, 23, 1239–1253. [Google Scholar] [CrossRef]
- Vosahlik, D.; Turnovec, P.; Pekar, J.; Hanis, T. Vehicle Trajectory Planning: Minimum Violation Planning and Model Predictive Control Comparison. In Proceedings of the 2022 IEEE Intelligent Vehicles Symposium (IV), Aachen, Germany, 4–9 June 2022; pp. 145–150. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, Y.; Hu, Y. Lane-change trajectory planning method for driverless vehicles based on trajectory prediction. In Proceedings of the Sixth International Conference on Traffic Engineering and Transportation System (ICTETS 2022), Guangzhou, China, 16 February 2023; SPIE: Washington, DC, USA, 2023; Volume 12591, pp. 541–549. [Google Scholar] [CrossRef]
- Liu, Z.Q.; Jia, H.J.; Wang, P.; Zhou, G.L. A study on active collision avoidance model based on deceleration. China Saf. Sci. J. 2015, 25, 76–80. (In Chinese) [Google Scholar]
- John, S.; Jeffrey, C.H. Estimating lateral stability region of nonlinear 2 degree-of-freedom vehicle. In Proceedings of the International Congress and Exposition; SAE: Detroit, MI, USA, 1998; pp. 1–7. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Name | Parameters | Name |
|---|---|---|---|
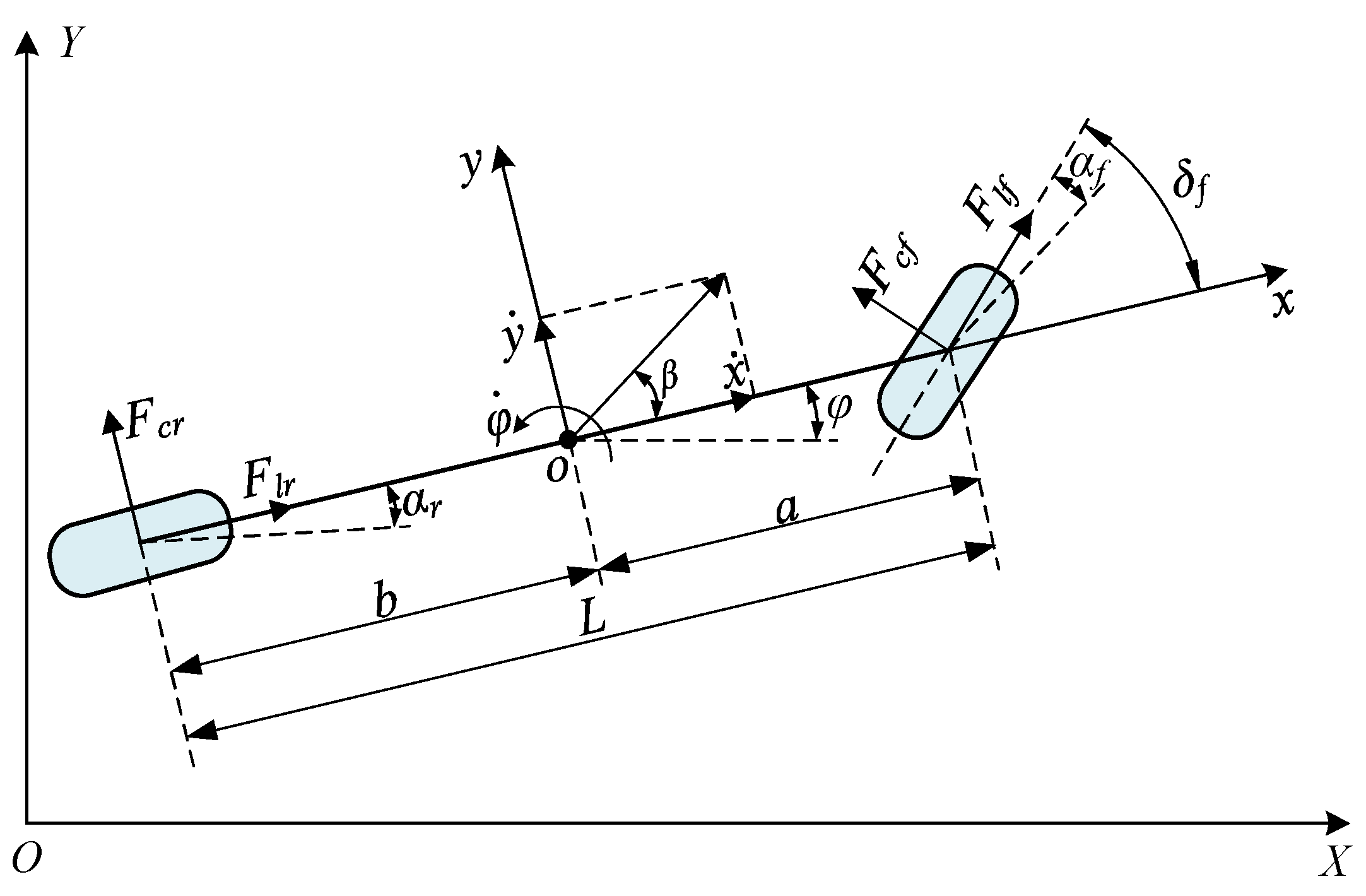
| m | Vehicle mass | Fcr | Rear tire lateral force |
| L | Wheelbase | Flr | Rear tire longitudinal force |
| a | Front wheelbase | αf | Front tire slip angle |
| b | Rear wheelbase | αr | Rear tire slip angle |
| φ | Yaw angle | sf | Front tire slip ratio |
| δf | Steering angle | sr | Rear tire slip ratio |
| Iz | Yaw inertia | Ccf | Front tire lateral stiffness |
| β | Side slip angle | Ccr | Rear tire lateral stiffness |
| Fcf | Front tire lateral force | Clf | Front tire longitudinal stiffness |
| Flf | Front tire longitudinal force | Clr | Rear tire longitudinal stiffness |
| Parameter Name | Parameter Value | Parameter Name | Parameter Value |
|---|---|---|---|
| Vehicle mass m/kg | 1723 | Lateral stiffness of rear axle Ccr/(Nꞏrad−1) | −62,700 |
| Vehicle length L/m | 4.70 | Tire size | 225/60 R18 |
| Vehicle width B/m | 1.80 | Yaw inertia Iz/(kgꞏm2) | 3234 |
| Front wheelbase Bf/m | 1.23 | Air drag coefficient ρ | 0.34 |
| Rear wheelbase Br/m | 1.47 | Frontal area A/m2 | 2.35 |
| Lateral stiffness of front axle Ccf/(Nꞏrad−1) | −66,900 | Rolling drag coefficient f | 0.015 |
| Parameter Name | Parameter Value | Parameter Name | Parameter Value |
|---|---|---|---|
| Sampling time Ts/ms | 100 | Weight matrix R | 200 |
| Predict horizon NP | 20 | Weight matrix Q | 10 |
| Control horizon NC | 2 |
| Parameter Name | Parameter Value | Parameter Name | Parameter Value |
|---|---|---|---|
| Sampling time Ts/ms | 20 | Slack factor weight coefficient ρ | 1000 |
| Predict horizon NP | 30 | Output volume bias weight matrix R | |
| Control horizon NC | 1 | Control volume bias weight matrix Q |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Zhai, D.; Fan, J.; Dong, G. Study on Lane-Change Replanning and Trajectory Tracking for Intelligent Vehicles Based on Model Predictive Control. World Electr. Veh. J. 2023, 14, 234. https://doi.org/10.3390/wevj14090234
Li Y, Zhai D, Fan J, Dong G. Study on Lane-Change Replanning and Trajectory Tracking for Intelligent Vehicles Based on Model Predictive Control. World Electric Vehicle Journal. 2023; 14(9):234. https://doi.org/10.3390/wevj14090234
Chicago/Turabian StyleLi, Yaohua, Dengwang Zhai, Jikang Fan, and Guoqing Dong. 2023. "Study on Lane-Change Replanning and Trajectory Tracking for Intelligent Vehicles Based on Model Predictive Control" World Electric Vehicle Journal 14, no. 9: 234. https://doi.org/10.3390/wevj14090234
APA StyleLi, Y., Zhai, D., Fan, J., & Dong, G. (2023). Study on Lane-Change Replanning and Trajectory Tracking for Intelligent Vehicles Based on Model Predictive Control. World Electric Vehicle Journal, 14(9), 234. https://doi.org/10.3390/wevj14090234