

Energy Cost Analysis and Operational Range Prediction Based on Medium- and Heavy-Duty Electric Vehicle Real-World Deployments across the United States


Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials and Data
2.2. Methods
2.2.1. Energy Efficiency Comparison and Energy Cost Savings Analyses
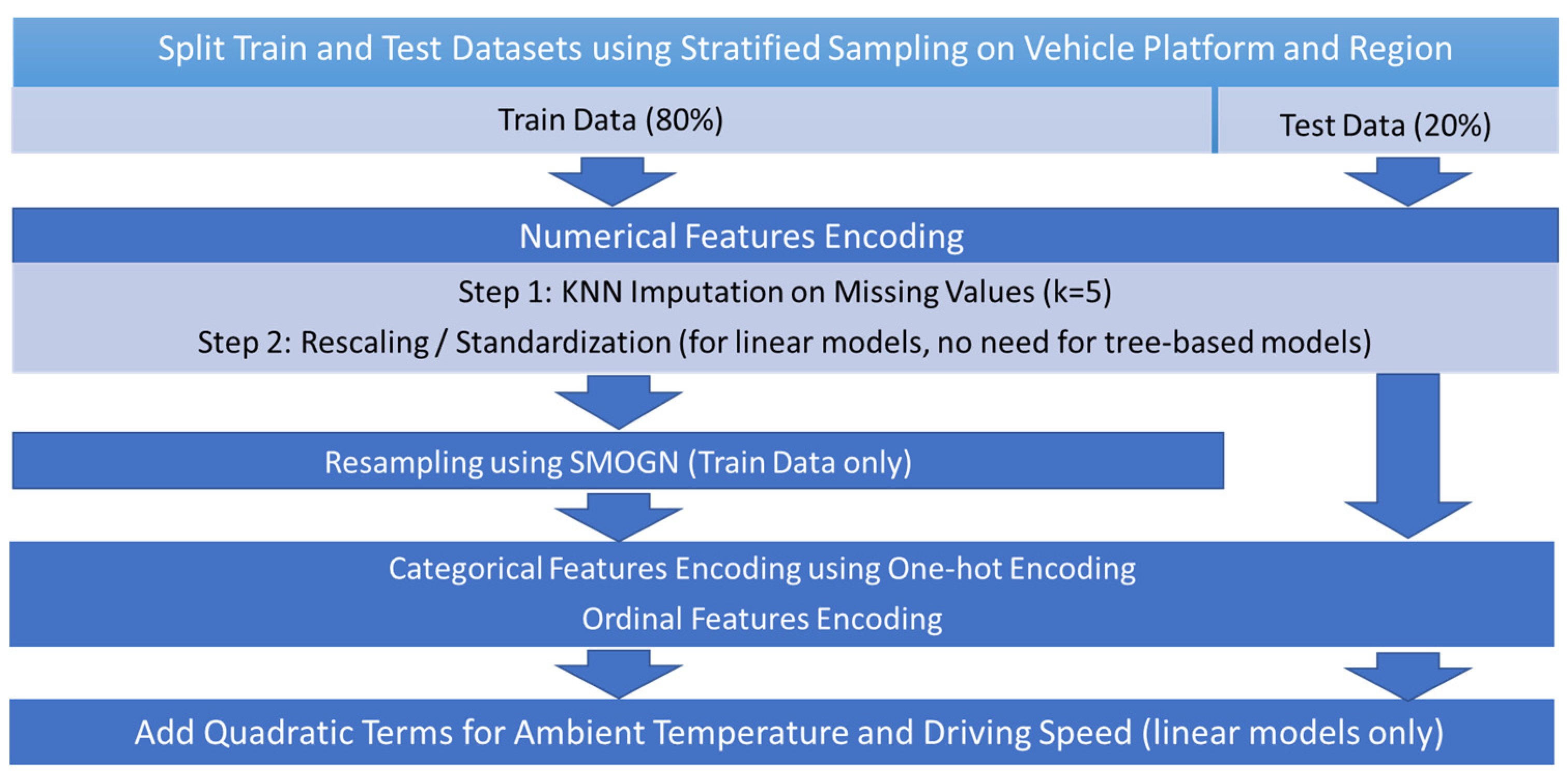
2.2.2. Vehicle Efficiency Prediction: Model Selection, Feature Engineering and Model Training
2.2.3. Operational Range Prediction: One Year of Duty Cycle Simulation and Range Forecast
Battery State of Charge Buffer (%)
3. Results and Discussion
3.1. Energy Efficiency Advantages Indicate Energy Cost Savings
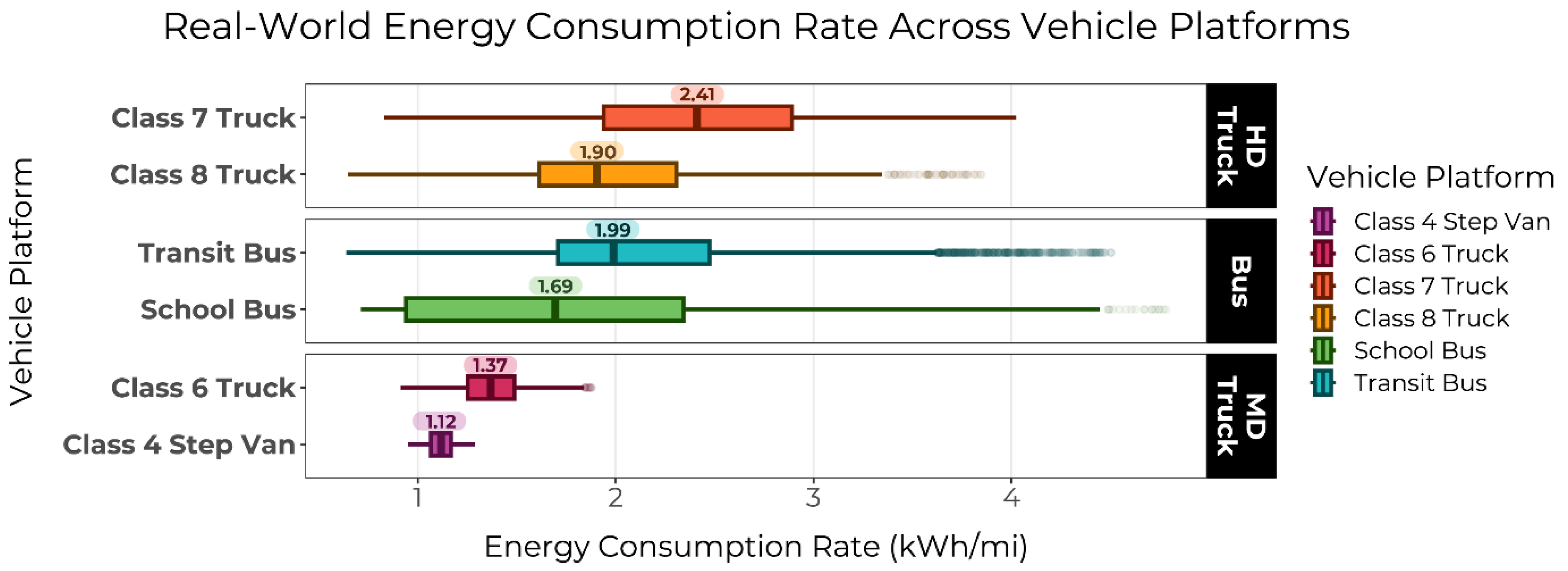
3.1.1. Energy Efficiency Comparison Analysis
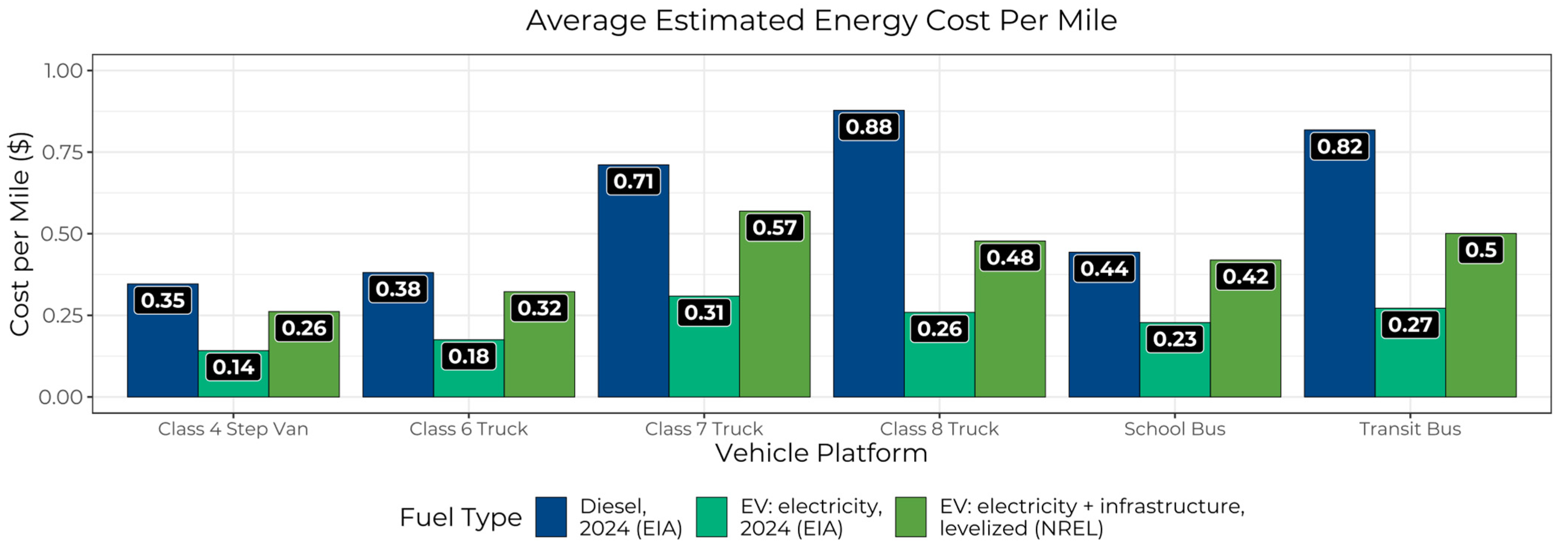
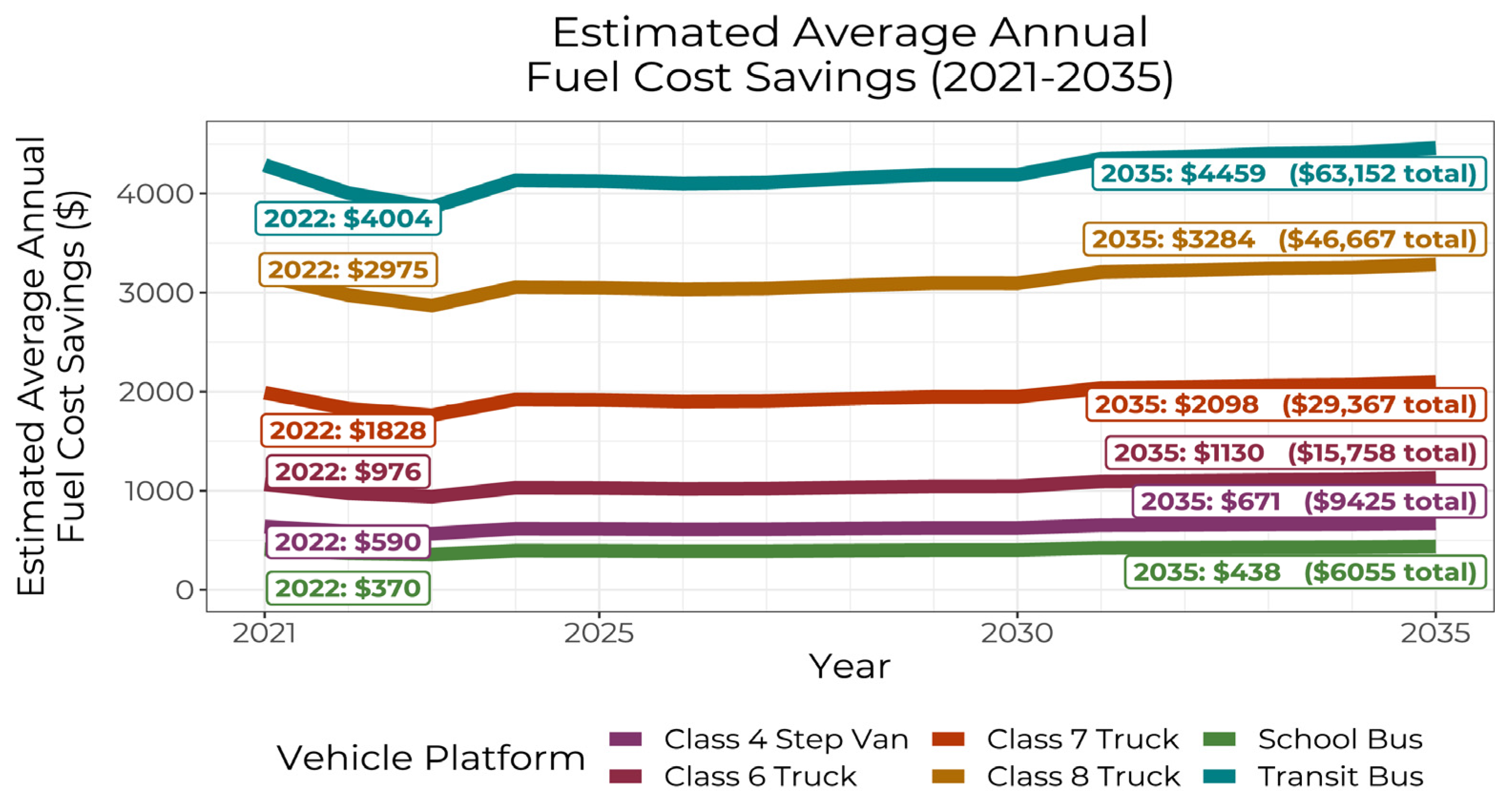
3.1.2. Energy Cost Savings Comparison Analysis
3.2. Vehicle Efficiency Predictions Based on Known Real-World Factors
3.2.1. Model Performance Evaluation
3.2.2. Model Result Analysis
3.3. Operational Range Predictions
4. Conclusions
4.1. Energy Efficiency Comparison and Energy Cost Savings Analyses
4.2. Vehicle Efficiency Prediction and Year-round Operational Range Forecast
- Because temperature and congestion can significantly impact EVs’ efficiency and range, fleets should select vehicle models that can satisfy most of their range needs throughout an entire year, while extending operational range in colder months and congested areas by applying energy-saving practices. For example, fleets should plan to pre-heat vehicle cabin and keep vehicle doors closed as much as possible, charge midday on extremely cold days, and optimize routes and schedules to avoid heavy traffic where possible.
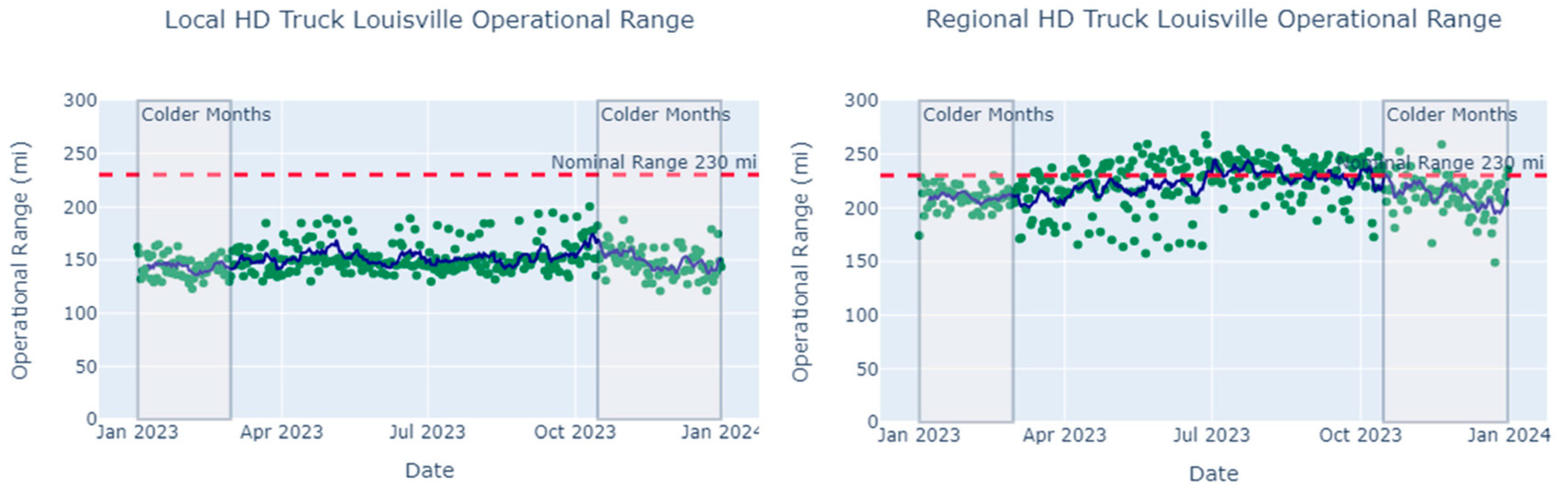
- Due to variations in duty cycle characteristics, local-haul operations (less than 100 miles daily) can have 25% lower operational range than regional-haul operations (100–300 miles daily), despite using the same vehicle model in the same example city. Furthermore, local HD truck fleets may need to deploy trucks with a nominal range nearly double their expected maximum daily range to meet route needs under more extreme driving conditions, such as colder temperatures, and local duty cycle requirements, such as the high idling time percentage and traffic levels found in urban delivery duty cycles. Alternatively, fleets can consider downsizing HD trucks to MD trucks or vans if they have sufficient payload.
4.3. Limitations and Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sato, S.; Jiang, Y.J.; Russell, R.L.; Miller, J.W.; Karavalakis, G.; Durbin, T.D.; Johnson, K.C. Experimental driving performance evaluation of battery-powered medium and heavy duty all-electric vehicles. Int. J. Electr. Power Energy Syst. 2022, 141, 108100. [Google Scholar] [CrossRef]
- Forrest, K.; Mac Kinnon, M.; Tarroja, B.; Samuelsen, S. Estimating the technical feasibility of fuel cell and battery electric vehicles for the medium and heavy duty sectors in California. Appl. Energy 2020, 276, 115439. [Google Scholar] [CrossRef]
- CALSTART. Zero-Emission Truck and Bus Market Update. October 2022. Available online: https://globaldrivetozero.org/zeti-data-explorer/ (accessed on 20 October 2022).
- Prasad, S.L.; Gudipalli, A. Range-Anxiety Reduction Strategies for Extended-Range Electric Vehicle. Int. Trans. Electr. Energy Syst. 2023, 2023, 7246414. [Google Scholar] [CrossRef]
- Chakraborty, P.; Parker, R.; Hoque, T.; Cruz, J.; Du, L.; Wang, S.; Bhunia, S. Addressing the range anxiety of battery electric vehicles with charging en route. Sci. Rep. 2022, 12, 5588. [Google Scholar] [CrossRef] [PubMed]
- Giuliano, G.; Dessouky, M.; Dexter, S.; Fang, J.; Hu, S.; Miller, M. Heavy-duty trucks: The challenge of getting to zero. Transp. Res. Part D Transp. Environ. 2021, 93, 102742. [Google Scholar] [CrossRef]
- Smith, D.; Ozpineci, B.; Graves, R.L.; Jones, P.T.; Lustbader, J.; Kelly, K.; Walkowicz, K.; Birky, A.; Payne, G.; Sigler, C.; et al. Medium- and Heavy-Duty Vehicle Electrification: An Assessment of Technology and Knowledge Gaps (No. ORNL/SPR-2020/7); Oak Ridge National Laboratory (ORNL): Oak Ridge, TN, USA; Available online: https://doi.org/10.2172/1615213 (accessed on 29 April 2022).
- CALSTART. California HVIP Total Cost of Ownership Estimator. Available online: https://californiahvip.org/tco/ (accessed on 24 October 2022).
- CARB. Battery Electric Truck and Bus Energy Efficiency Compared to Conventional Diesel Vehicles, May 2018. Available online: https://ww2.arb.ca.gov/sites/default/files/2018-11/180124hdbevefficiency.pdf (accessed on 20 March 2023).
- U.S. DOE Alternative Fuels Data Center. Average Retail Fuel Prices in the United States, October 2022. Available online: https://afdc.energy.gov/fuels/prices.html (accessed on 24 October 2022).
- CALSTART. MHD EV Data Visualization Dashboard Version 1.5. Available online: https://calstart.org/projects/medium-heavy-duty-ev-deployment-data/ (accessed on 11 October 2023).
- Nykvist, B.; Olsson, O. The feasibility of heavy battery electric trucks. Joule 2021, 5, 901–913. [Google Scholar] [CrossRef]
- Perugu, H.; Collier, S.; Tan, Y.; Yoon, S.; Herner, J. Characterization of battery electric transit bus energy consumption by temporal and speed variation. Energy 2023, 263, 125914. [Google Scholar] [CrossRef]
- Fetene, G.M.; Kaplan, S.; Mabit, S.L.; Jensen, A.F.; Prato, C.G. Harnessing big data for estimating the energy consumption and driving range of electric vehicles. Transp. Res. Part D Transp. Environ. 2017, 54, 1–11. [Google Scholar] [CrossRef]
- Ahmed, M.; Mao, Z.; Zheng, Y.; Chen, T.; Chen, Z. Electric Vehicle Range Estimation Using Regression Techniques. World Electr. Veh. J. 2022, 13, 105. [Google Scholar] [CrossRef]
- Qi, X.; Wu, G.; Boriboonsomsin, K.; Barth, M.J. Data-driven decomposition analysis and estimation of link-level electric vehicle energy consumption under real-world traffic conditions. In Proceedings of the 14th World Conference of Transport-Research-Society (WCTRS), Shanghai, China, 10–15 July 2016; pp. 36–52. [Google Scholar]
- Xu, X.; Aziz, H.A.; Liu, H.; Rodgers, M.O.; Guensler, R. A scalable energy modeling framework for electric vehicles in regional transportation networks. Appl. Energy 2020, 269, 115095. [Google Scholar] [CrossRef]
- Ullah, I.; Liu, K.; Yamamoto, T.; Zahid, M.; Jamal, A. Electric vehicle energy consumption prediction using stacked generalization: An ensemble learning approach. Int. J. Green Energy 2021, 18, 896–909. [Google Scholar] [CrossRef]
- Modi, S.; Bhattacharya, J.; Basak, P. Estimation of energy consumption of electric vehicles using Deep Convolutional Neural Network to reduce driver’s range anxiety. ISA Trans. 2019, 98, 454–470. [Google Scholar] [CrossRef] [PubMed]
- Weiss, M.; Cloos, K.C.; Helmers, E. Energy efficiency trade-offs in small to large electric vehicles. Environ. Sci. Eur. 2020, 32, 46. [Google Scholar] [CrossRef]
- Yuksel, T.; Michalek, J.J. Effects of Regional Temperature on Electric Vehicle Efficiency, Range, and Emissions in the United States. Environ. Sci. Technol. 2015, 49, 3974–3980. [Google Scholar] [CrossRef] [PubMed]
- Qiu, Y.; Dobbelaere, C.; Song, S. Real-world Energy Efficiency Analysis and Implications: Medium- and Heavy-Duty EV Deployments Across the U.S. In Proceedings of the 36th International Electric Vehicle Symposium and Exhibition, Sacramento, CA, USA, 11–14 June 2023; Available online: http://evs36.com/wp-content/uploads/finalpapers/FinalPaper_Qiu_Yin_Dobbelaere_Cristina.pdf (accessed on 1 October 2023).
- U.S. DOE Alternative Fuels Data Center. Average Fuel Economy by Major Vehicle Category, February 2020. Available online: https://afdc.energy.gov/data/10310 (accessed on 22 February 2023).
- U.S. EIA. Short-Term Energy Outlook, November 2021. Available online: https://www.eia.gov/analysis/projection-data.php#annualproj (accessed on 20 January 2023).
- National Renewable Energy Laboratory. Estimating the Breakeven Cost of Delivered Electricity to Charge Class 8 Electric Tractors. 2022. Available online: https://www.nrel.gov/docs/fy23osti/82092.pdf (accessed on 9 March 2023).
- CALSTART. Drive to Zero’s Zero-Emission Technology Inventory (ZETI) Tool Version 8.2. 2023. Available online: https://globaldrivetozero.org/tools/zero-emission-technology-inventory/ (accessed on 11 October 2023).
- NOAA. Global Historical Climatology Network Daily (GHCNd). Available online: https://www.ncei.noaa.gov/products/land-based-station/global-historical-climatology-network-daily (accessed on 26 October 2022).
- NASA. NLDAS-2: North American Land Data Assimilation System Forcing Fields. Available online: https://developers.google.com/earth-engine/datasets/catalog/NASA_NLDAS_FORA0125_H002 (accessed on 26 October 2022).
- Muñoz Sabater, J. ERA5-Land Monthly Averaged Data from 1981 to Present. 2023. Available online: https://developers.google.com/earth-engine/datasets/catalog/ECMWF_ERA5_LAND_HOURLY (accessed on 6 February 2023).
- Lovelace, R.; Felix, R.; Talbot, J. Slopes package v1.0.0. Available online: https://ropensci.github.io/slopes/index.html (accessed on 13 January 2023).
- OpenStreetMap Data Extracts. Available online: https://download.geofabrik.de/index.html (accessed on 13 January 2023).
- Texas A&M Transportation Institute. Urban Mobility Report. 2021. Available online: https://mobility.tamu.edu/umr/congestion-data (accessed on 10 January 2023).
- USGS, TNM Download v2.0. Available online: https://apps.nationalmap.gov/downloader/ (accessed on 13 January 2023).
- CALSTART. Drive to Zero’s Zero-Emission Technology Inventory Data Explorer Version 3.3. 2023. Available online: https://globaldrivetozero.org/zeti-data-explorer/ (accessed on 11 October 2023).
- Urban Bus Toolkit. Percent Seated Capacity. Available online: https://ppiaf.org/sites/ppiaf.org/files/documents/toolkits/UrbanBusToolkit/assets/1/1c/1c27.html (accessed on 28 January 2023).
- Branco, P.; Torgo, L.; Ribeiro, R. SMOGN: A Pre-Processing Approach for Imbalanced Regression. Proc. Mach. Learn. Res. 2017, 74, 36–50. Available online: http://proceedings.mlr.press/v74/branco17a/branco17a.pdf (accessed on 1 February 2023).
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. Available online: https://scikit-learn.org/stable/index.html (accessed on 23 March 2023).
- Qiu, Y.; Leong, K.; Ichien, D.; Dobbelaere, C.; LeCroy, C. A Cross-Country Analysis of Medium-Duty and Heavy-Duty Electric Vehicle Deployments. In Proceedings of the 35th International Electric Vehicle Symposium and Exhibition, Oslo, Norway, 11–15 June 2022; Available online: https://calstart.org/wp-content/uploads/2023/11/EVS35Paper_DOE_v2.pdf (accessed on 29 November 2023).
- Lundberg, S.M.; Erion, G.; Chen, H.; DeGrave, A.; Prutkin, J.M.; Nair, B.; Katz, R.; Himmelfarb, J.; Bansal, N.; Lee, S.-I. From local explanations to global understanding with explainable AI for trees. Nat. Mach. Intell. 2020, 2, 56–67. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Literature | Model | Features That Significantly Impacted Light-Duty EV Energy Efficiency |
|---|---|---|
| Qi et al., 2017 [16] | PCA, decision tree, ANN | Negative kinetic energy, positive kinetic energy, speed, traffic |
| Fetene et al., 2017 [14] | Regression | Speed, acceleration, trip distance, season, rush hour, battery level when trip starts, temperature, precipitation, wind speed, visibility |
| Modi et al., 2019 [19] | CNN | Significant features not specified, but the selected model used the following features: speed, road elevation, tractive effort |
| Weiss et al., 2020 [20] | Regression | Vehicle weight |
| Xu et al., 2020 [17] | Simulation-based inference model | Speed, road type |
| Ahmed et al., 2022 [15] | Regression | Speed, acceleration, vehicle weight |
| Vehicle Platform | Gross Vehicle Weight Rating (lbs.) | Number of Vehicles in Analysis | Number of Vehicle-Days in Analysis |
|---|---|---|---|
| Transit Bus | >33,000 | 90 | 28,093 |
| Type C School Bus | >33,000 | 17 | 1809 |
| Class 8 Day Cab Tractor | >33,000 | 14 | 1269 |
| Class 7 Box Truck | 26,001–33,000 | 7 | 1144 |
| Class 6 Box Truck | 19,501–26,000 | 6 | 2025 |
| Class 4 Step Van | 14,001–16,000 | 10 | 3012 |
| Total | 144 | 37,352 |
| Feature Groups | Features | Sources | |
|---|---|---|---|
| Duty Cycle | Average Driving Speed, Total Distance, Total Run Time, Driving Time, Idling Time Percentage | MHD EV Data Collection (CALSTART, 2023) | |
| Vehicle Configuration | Manufacturer, Model Name, Model Year, Weight Class, Vehicle Platform, Body Style, Rated Energy, Nominal Range, Estimated Payload | MHD EV Data Collection (CALSTART, 2023); ZETI Database (CALSTART, 2023) [26] | |
| Use Case | Vocation, Sector | MHD EV Data Collection (CALSTART, 2023) | |
| Geography | Region, State | MHD EV Data Collection (CALSTART, 2023) | |
| City Profile | Climate | Average Ambient Temperature, Average Precipitation | NOAA daily average temperatures [27]; NLDAS-2 hourly dataset [28]; ERA-5-Land hourly dataset [29] |
| Road | Average Road Grade | R package {slopes} [30] applied on OpenStreetMap network [31] | |
| Congestion | Annual Hours of Delay (general, highway) | Urban Mobility Report Congestion Data (Texas A&M Transportation Institute, 2021) [32] | |
| Vehicle Type | Vehicle Platform | Average EV Energy Efficiency (MPDGe) | Average Baseline Fuel Economy (MPDG) | Energy Efficiency Ratio (EER) |
|---|---|---|---|---|
| Medium-Duty Truck | Class 4 Step Van | 34.18 (±0.22) | 9.04 | 3.8 |
| Class 6 Truck | 28.09 (±0.18) | 8.21 | 3.4 | |
| Heavy-Duty Truck | Class 7 Truck | 16.89 (±0.35) | 4.40 | 3.8 |
| Class 8 Truck | 20.58 (±0.40) | 3.56 | 5.8 | |
| Bus | Type C School Bus | 27.16 (±0.73) | 7.06 | 3.8 |
| 35–40-ft Transit Bus | 19.07 (±0.08) | 3.83 | 5.0 |
| Regression Models | R2 | Mean Absolute Error (MAE) | Mean Squared Error (MSE) | Root Mean Squared Error (RMSE) |
|---|---|---|---|---|
| Lasso (L1 Regularization) | 0.550 | 0.351 | 0.236 | 0.486 |
| Ridge (L2 Regularization) | 0.567 | 0.339 | 0.227 | 0.476 |
| Gradient Boosted Trees (GBR) | 0.694 | 0.252 | 0.161 | 0.401 |
| Random Forest (RFR) | 0.699 | 0.255 | 0.158 | 0.397 |
| XGBoost (XGB) | 0.702 | 0.253 | 0.156 | 0.396 |
| Top Features | XGBoost | Random Forest | Gradient Boosted Trees |
|---|---|---|---|
| Average driving speed | #1 | #2 | #3 |
| Average ambient temperature | #2 | #3 | #1 |
| Manufacturer Proterra | #3 | #1 | #6 |
| Total distance | #4 | #5 | #5 |
| Congestion hour delay | #5 | #6 | #2 |
| Vehicle Type | Total Distance (miles) | Driving Time (hours) | Total Run Time (hours) | Average Driving Speed (mph) | Idling Time Percentage (%) |
|---|---|---|---|---|---|
| Transit bus | 83.5 (±3.8) | 5.6 (±0.2) | 8.4 (±0.4) | 15.6 (±0.7) | 25.2 (±2.6) |
| Local HD truck | 45.3 (±1.4) | 2.8 (±0.1) | 4.1 (±0.2) | 18.0 (±0.9) | 28.5 (±2.0) |
| Regional HD truck | 71.3 (±4.0) | 3.2 (±0.2) | 4.3 (±0.2) | 22.7 (±1.3) | 23.3 (±1.5) |
| City | Average Ambient Temperature (°F) | Precipitation (Inches) | Congestion Hour Delay (h) | Average Road Grade (%) |
|---|---|---|---|---|
| Los Angeles, CA | 65.7 (±1.0; 46–86) | 0.002 (±0.0004) | 952,183,000 | 2.1 |
| Louisville, KY | 59.6 (±1.7; 22–86) | 0.006 (±0.0005) | 30,610,000 | 1.7 |
| Missoula, MT | 41.8 (±1.6; 6–74) | 0.003 (±0.0002) | 2,263,000 | 1.4 |
| Chicago, IL | 53.2 (±2.0; 10–85) | 0.005 (±0.0005) | 331,657,000 | 0.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiu, Y.; Dobbelaere, C.; Song, S. Energy Cost Analysis and Operational Range Prediction Based on Medium- and Heavy-Duty Electric Vehicle Real-World Deployments across the United States. World Electr. Veh. J. 2023, 14, 330. https://doi.org/10.3390/wevj14120330
Qiu Y, Dobbelaere C, Song S. Energy Cost Analysis and Operational Range Prediction Based on Medium- and Heavy-Duty Electric Vehicle Real-World Deployments across the United States. World Electric Vehicle Journal. 2023; 14(12):330. https://doi.org/10.3390/wevj14120330
Chicago/Turabian StyleQiu, Yin, Cristina Dobbelaere, and Shuhan Song. 2023. "Energy Cost Analysis and Operational Range Prediction Based on Medium- and Heavy-Duty Electric Vehicle Real-World Deployments across the United States" World Electric Vehicle Journal 14, no. 12: 330. https://doi.org/10.3390/wevj14120330
APA StyleQiu, Y., Dobbelaere, C., & Song, S. (2023). Energy Cost Analysis and Operational Range Prediction Based on Medium- and Heavy-Duty Electric Vehicle Real-World Deployments across the United States. World Electric Vehicle Journal, 14(12), 330. https://doi.org/10.3390/wevj14120330