
A State-of-Charge Estimation Method Based on Multi-Algorithm Fusion




Abstract
:1. Introduction
2. Modelling and Parameter Identification
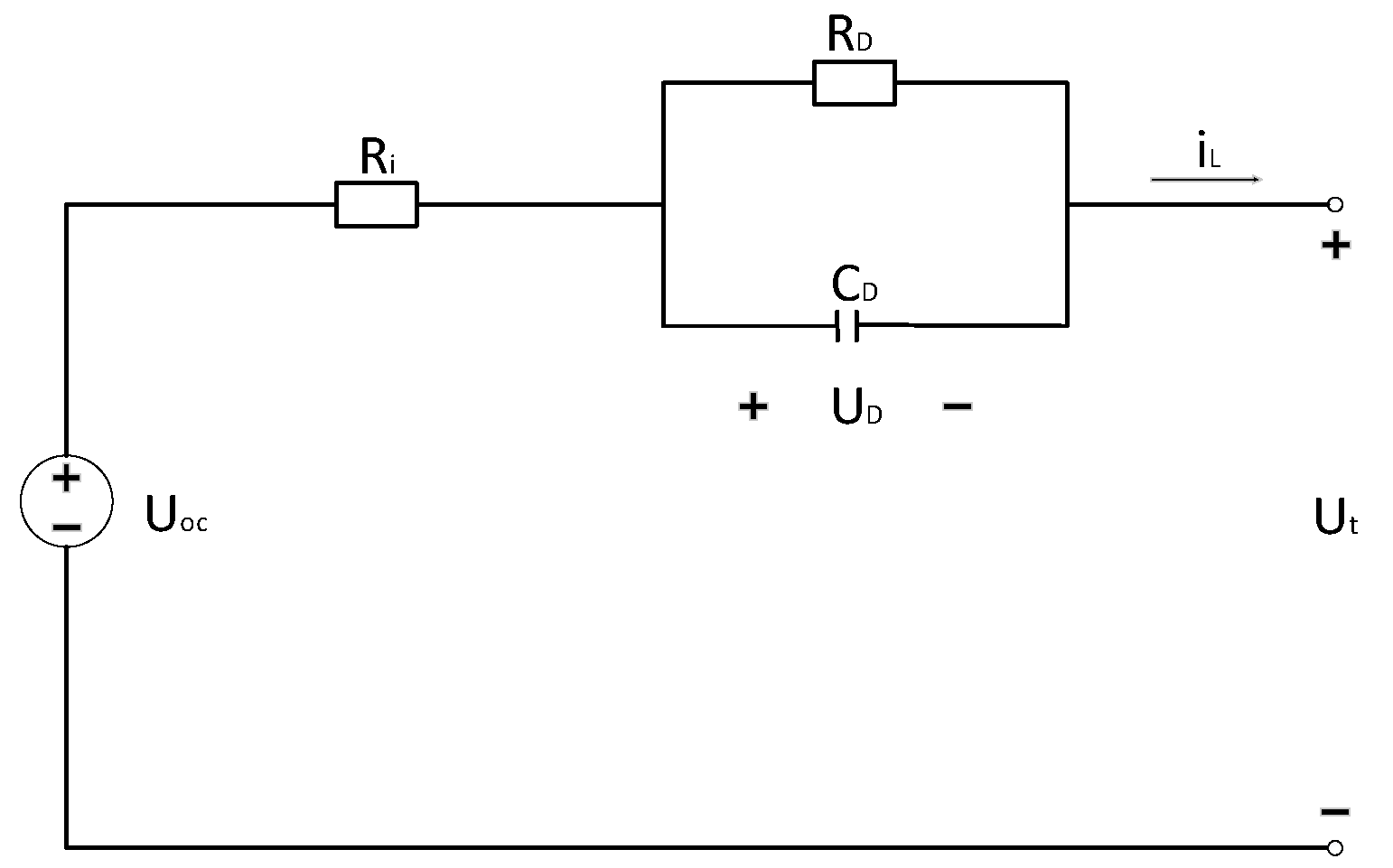
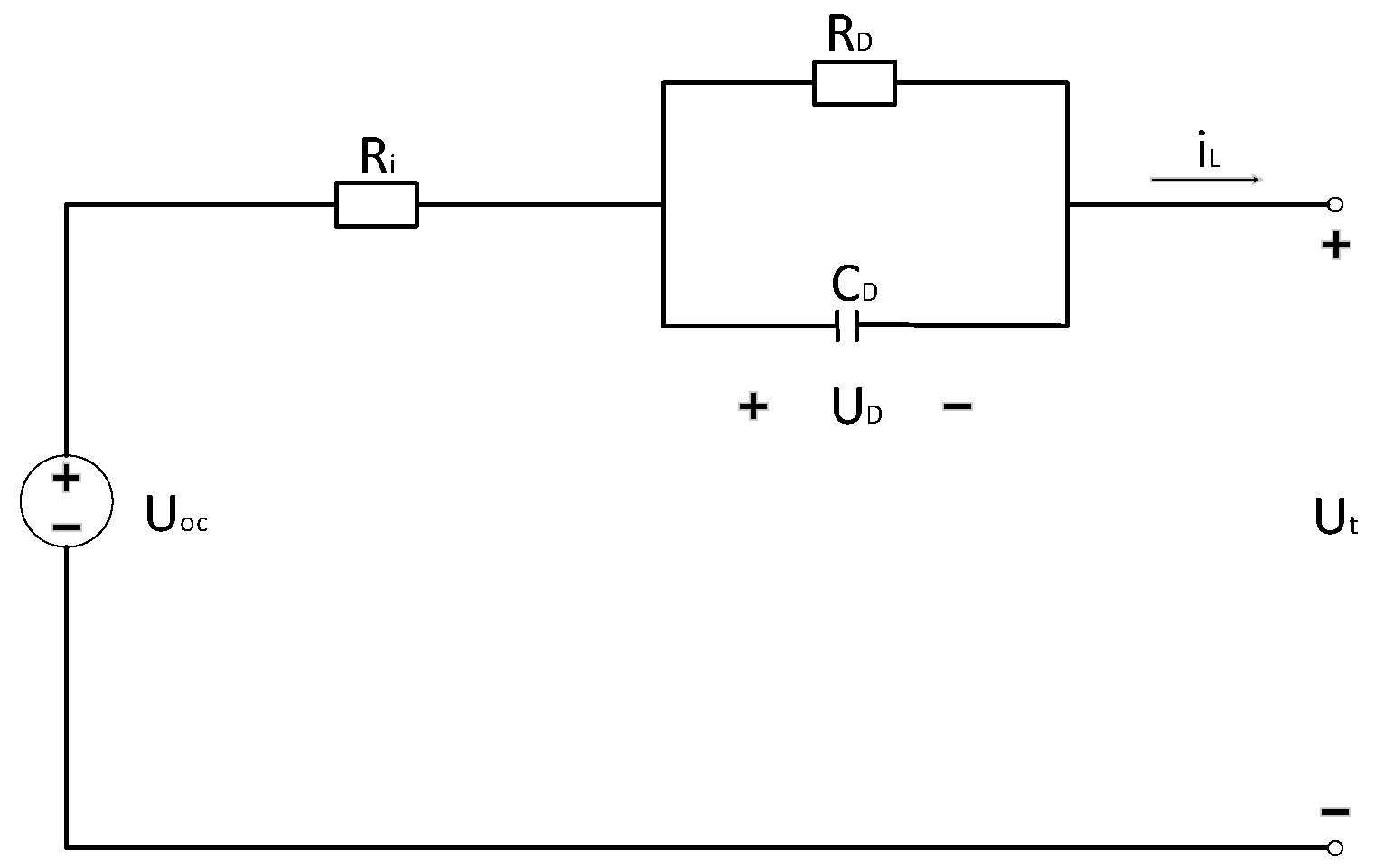
2.1. Modelling for Lithium-Ion Batteries
2.2. OCV-SOC Curve
- The battery is fully charged through the standard constant current and constant voltage (CC-CV) charging method. After standing for 5 h, the terminal voltage was measured. This value is regarded as the open circuit voltage value of SOC = 100%.
- Discharge with standard current and constant current. The cutoff condition is that the discharge capacity reaches 5% of the maximum available capacity, or the battery voltage drops to the discharge cutoff voltage. After standing for 5 h, measure the terminal voltage.
- Repeat step 2 until the power battery reaches the discharge cutoff voltage.
2.3. Parameter Identification
- Fully charge the two batteries with the CC-CV charging method.
- Let stand for 5 h.
- Load the mixed pulse current excitation sequence, discharge the battery with constant current for a certain period of time, and then let it stand for 1 h. (Constant current discharge of battery to ensure 10% SOC interval between two times).
- Repeat step 3 until the discharge reaches the cutoff voltage.
3. State of Charge Estimation
3.1. State of Charge Definition
3.2. Extended Kalman Filter Estimation Method
3.3. SOC Estimation Algorithm with Adaptive Extended Kalman Filter Method
3.4. H Infinity Filter SOC Estimation Algorithm
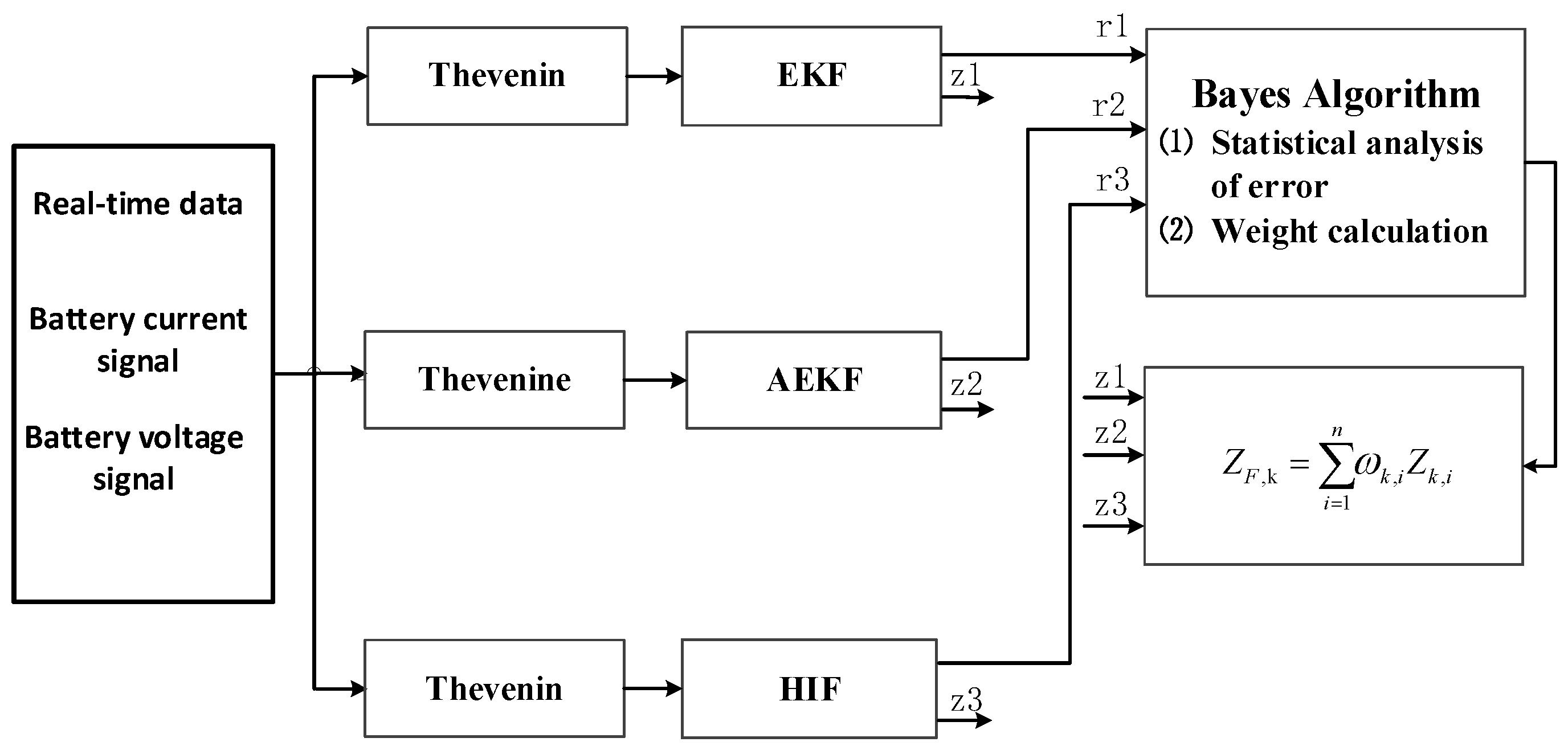
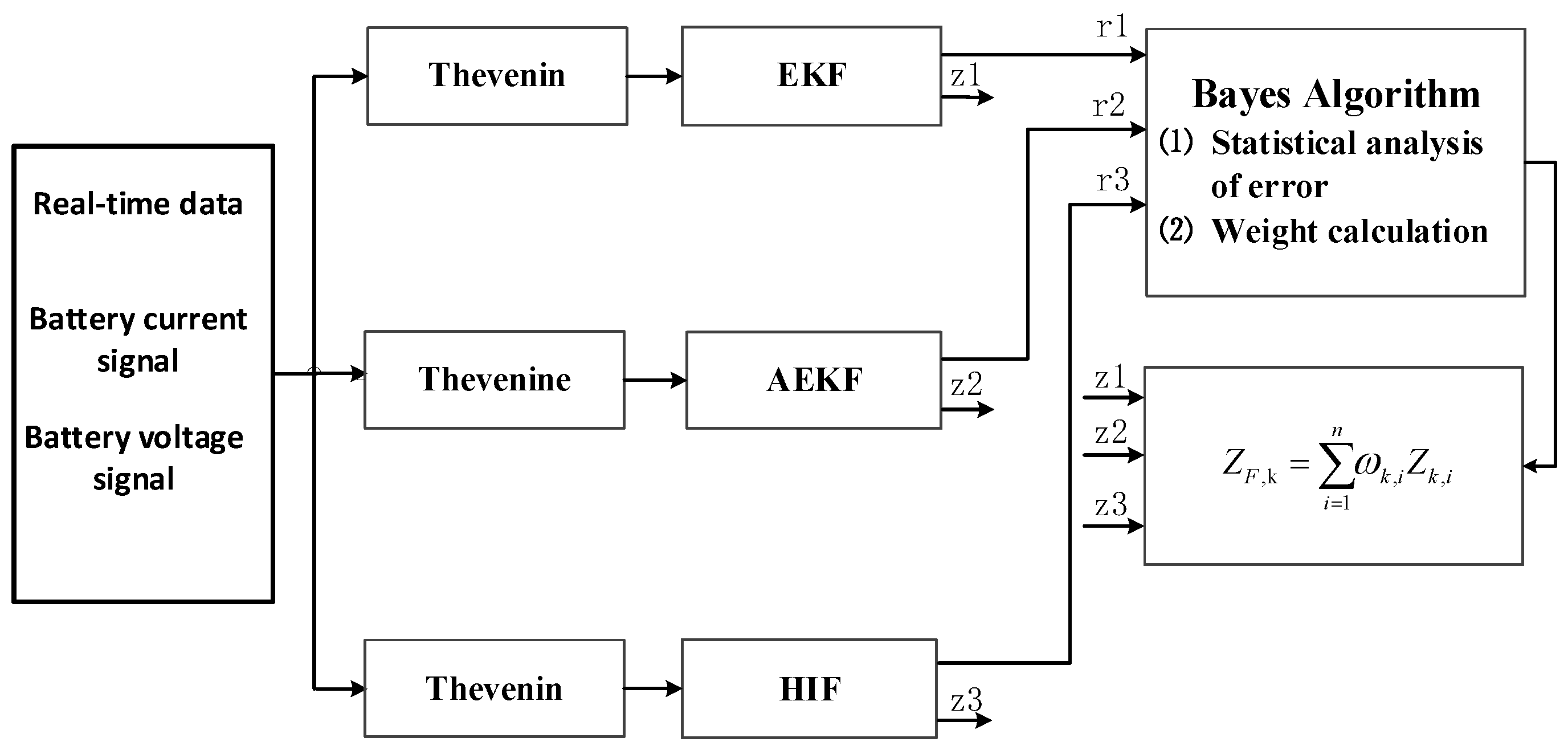
3.5. Multi-Algorithm Fusion SOC Estimation
- 1.
- Import the terminal voltage residuals of the previous three algorithms.
- 2.
- Calculate the residual mean and variance of each algorithm. ( = 1,2,3, corresponding to the three algorithms).
- 3.
- Calculate the conditional probability density function at time k for each algorithm.
- 4.
- Calculate the weight of each algorithm at time k, where n is the number of algorithms.
- 5.
- Obtain the SOC estimated value of the fusion algorithm according to the weight.
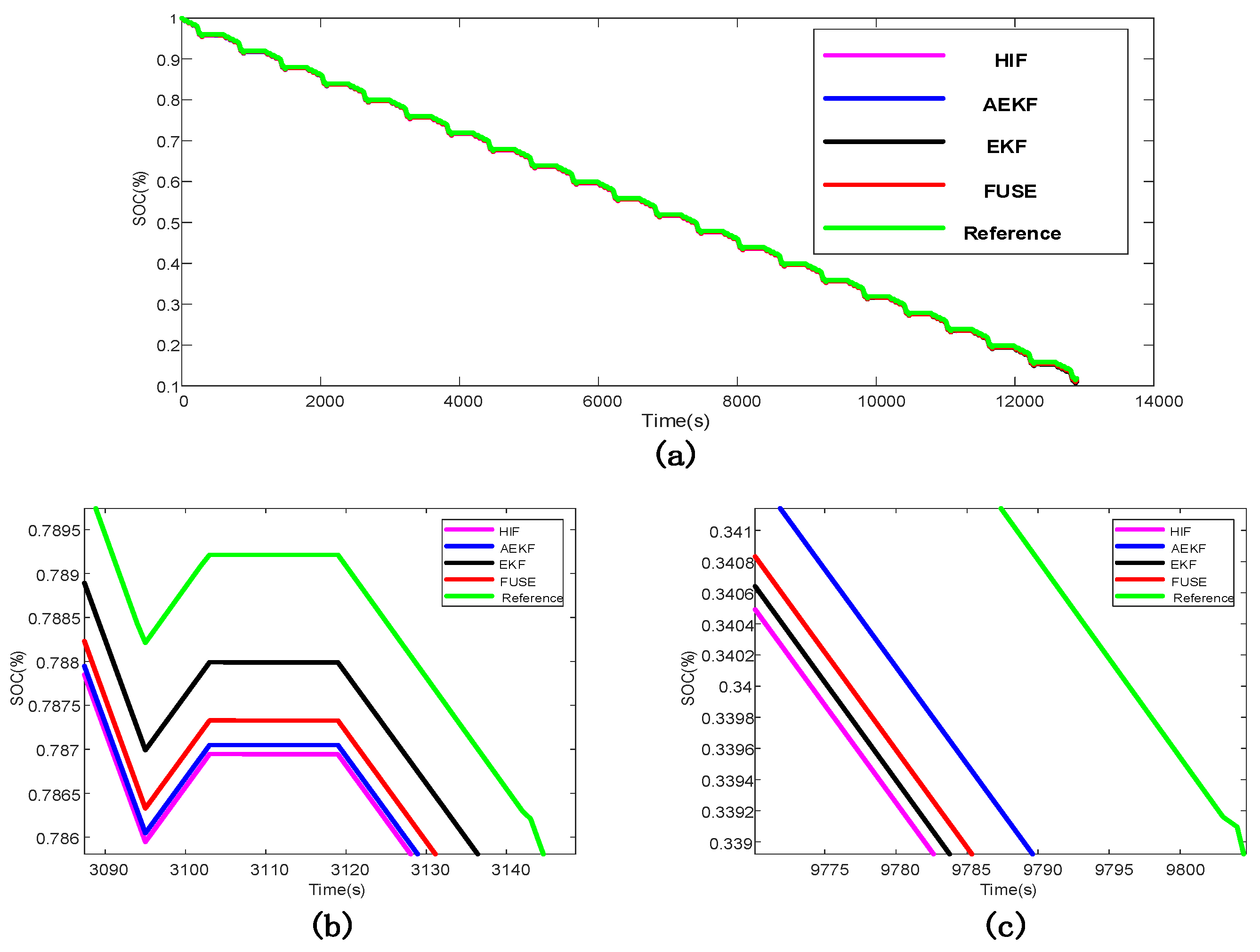
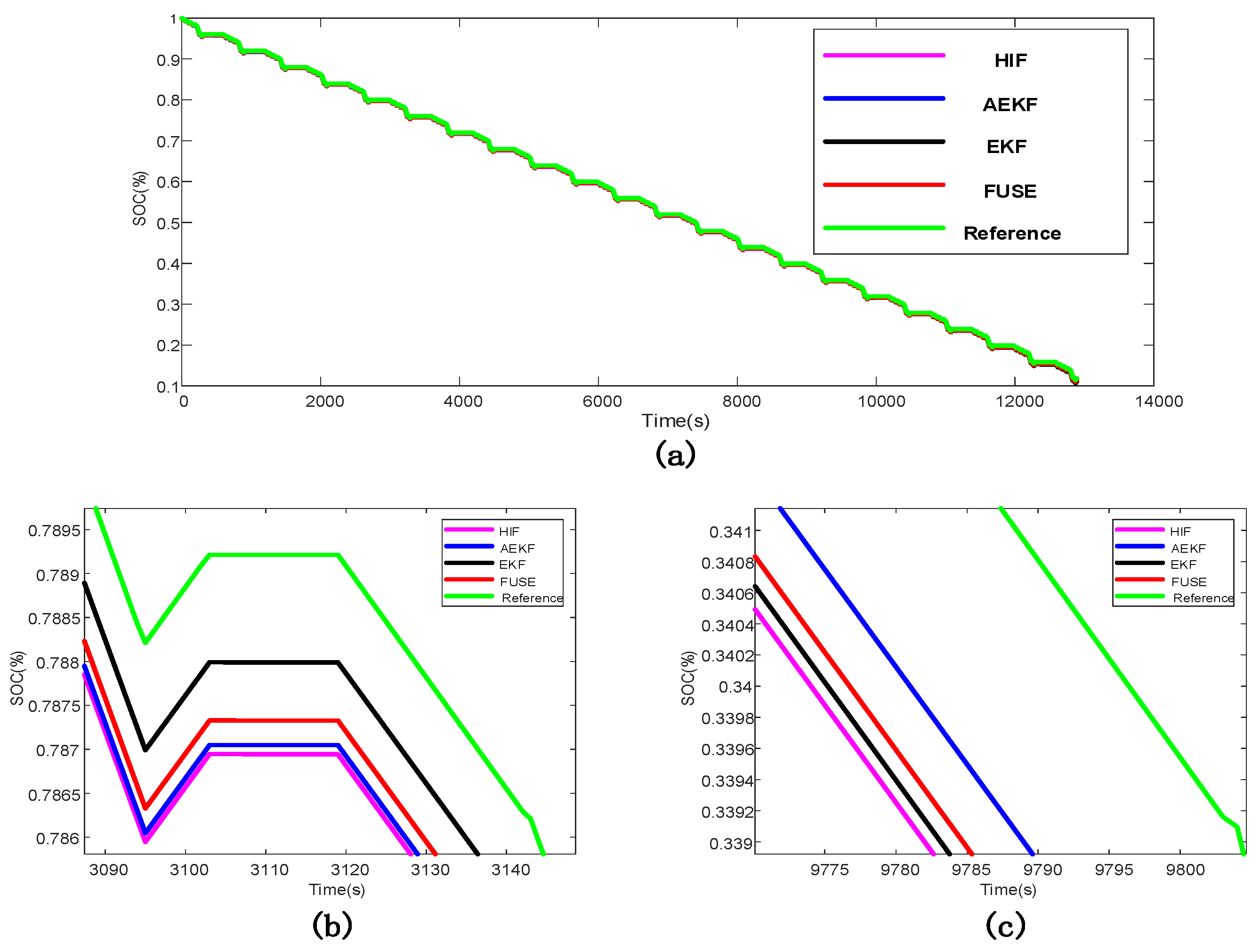
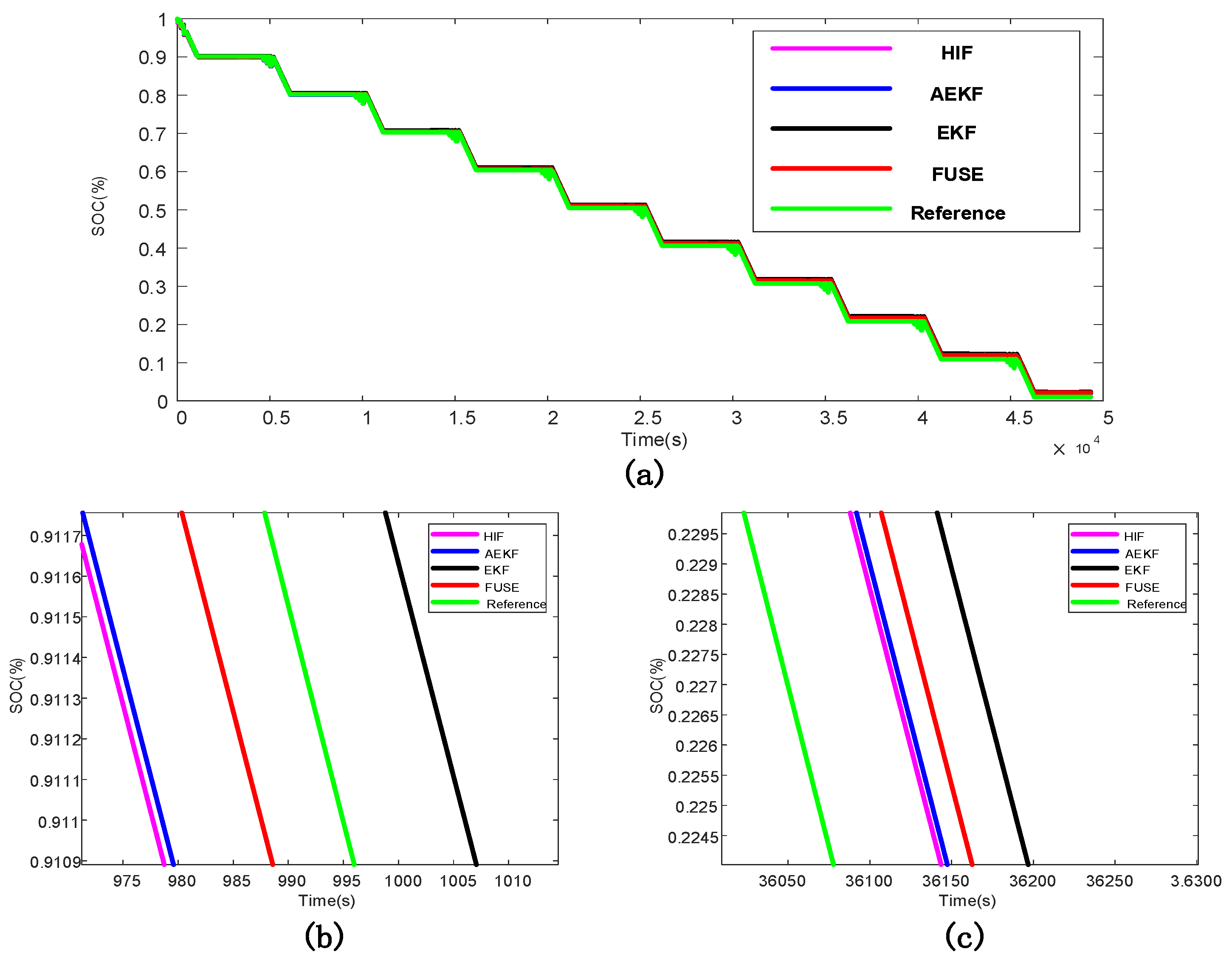
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| EV | Electric vehicle |
| SOC | State of charge |
| EKF | Extended Kalman filter |
| AEKF | Adaptive extended Kalman filter |
| HIF | H infinite filter |
| BMS | Battery management system |
| ECM | Equivalent circuit model |
| KF | Kalman filter |
| PF | Particle filter |
| NARXNN | Nonlinear autoregressive algorithm with exogenous neural network |
| AWCPF | Adaptive weighted volume particle filter |
| DP | Dual polarization |
| AIC | Akaike Information Criterion |
| CC-CV | Constant current and constant voltage |
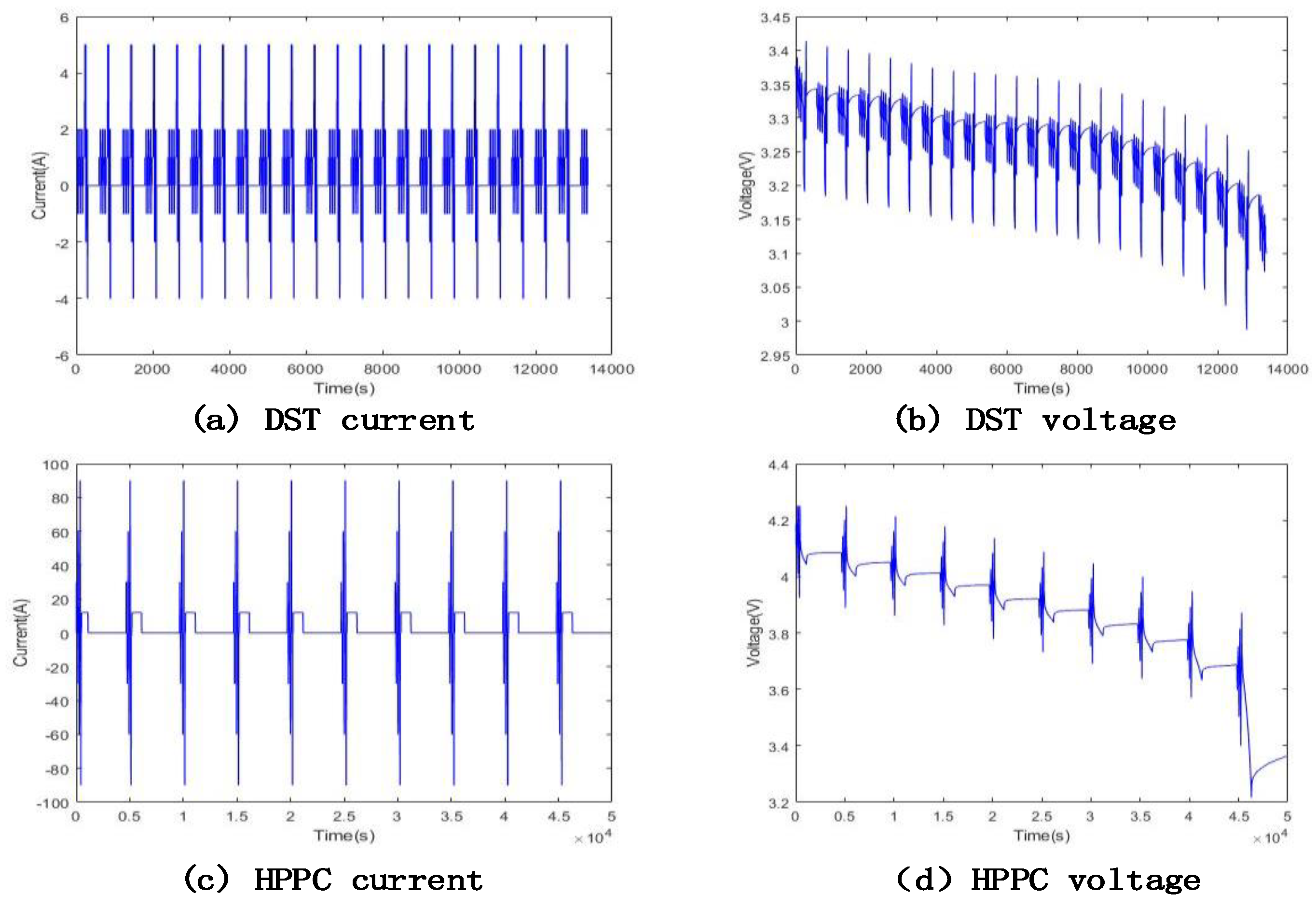
| HPPC | Hybrid Pulse Power Characterization |
| DST | Dynamic Stress Test |
| OCV | Open circuit voltage |
| ME | Mean error |
| MAE | Mean absolute error |
| RMSE | Root mean square error |
References
- Li, C.R.; Xiao, F.; Fan, Y.X. A Hybrid Approach to Lithium-Ion Battery SOC Estimation Based on Recurrent Neural Network with Gated Recurrent Unit and Huber-M Robust Kalman Filter. Trans. China Electrotech. Soc. 2020, 35, 2051–2062. [Google Scholar]
- Meng, J.; Ricco, M.; Luo, G.; Swierczynski, M.J.; Stroe, D.-I.; Stroe, A.-I.; Teodorescu, R. An Overview and Comparison of Online Implementable SOC Estimation Methods for Lithium-Ion Battery. IEEE Trans. Ind. Appl. 2017, 54, 1583–1591. [Google Scholar] [CrossRef]
- Wang, Y.; Tian, J.; Sun, Z.; Wang, L.; Xu, R.; Li, M.; Chen, Z. A Comprehensive Review of Battery Modeling and State Estimation Approaches for Advanced Battery Management Systems. Renew. Sustain. Energy Rev. 2020, 131, 110015. [Google Scholar] [CrossRef]
- Hu, X.; Jiang, H.; Feng, F.; Liu, B. An Enhanced Multi-State Estimation Hierarchy for Advanced Lithium-Ion Battery Management. Appl. Energy 2020, 257, 114019. [Google Scholar] [CrossRef]
- Shrivastava, P.; Soon, T.K.; Idris, M.Y.I.B.; Makhilef, S.; Adnan, S.B.R.S. Combined State of Charge and State of Energy Estimation of Lithium-Ion Battery Using Dual Forgetting Factor-Based Adaptive Extended Kalman Filter for Electric Vehicle Applications. IEEE Trans. Veh. Technol. 2021, 99, 1. [Google Scholar] [CrossRef]
- Yang, X.; Wang, S.; Xu, W.; Qiao, J.; Yu, C.; Fernandez, C. Fuzzy Adaptive Singular Value Decomposition Cubature Kalman Filtering Algorithm for Lithium-Ion Battery State-of-Charge Estimation. Int. J. Circuit Theory Appl. 2021, 50, 614–632. [Google Scholar] [CrossRef]
- Ye, Y.; Li, Z.; Lin, J.; Wang, X. State-Of-Charge Estimation with Adaptive Extended Kalman Filter and Extended Stochastic Gradient Algorithm for Lithium-Ion Batteries. J. Energy Storage 2021, 47, 103611. [Google Scholar] [CrossRef]
- Xiong, R.; Yu, Q.; Wang, L.Y.; Lin, C. A Novel Method to Obtain the Open Circuit Voltage for the State of Charge of Lithium Ion Batteries in Electric Vehicles by Using H Infinity Filter. Appl. Energy 2017, 207, 346–353. [Google Scholar] [CrossRef]
- He, H.; Xiong, R.; Zhang, X.; Sun, F.; Fan, J. State-of-Charge Estimation of the Lithium-Ion Battery Using an Adaptive Extended Kalman Filter Based on an Improved Thevenin Model. IEEE Trans. Veh. Technol. 2011, 60, 1461–1469. [Google Scholar] [CrossRef]
- Yao, J.; Ding, J.; Cheng, Y.; Feng, L. Sliding Mode-Based H-Infinity Filter for SOC Estimation of Lithium-Ion Batteries. Ionics 2021, 27, 5147–5157. [Google Scholar] [CrossRef]
- Shen, X.; Zhu, W.; Yang, Y.; Xie, J.; Huang, L. A State of Charge Estimation Method Based on APSO-PF for Lithium-ion Battery. In Proceedings of the IEEE 4th International Electrical and Energy Conference (CIEEC), Wuhan, China, 28–30 May 2021; pp. 1–6. [Google Scholar]
- Ye, M.; Guo, H.; Cao, B. A Model-Based Adaptive State of Charge Estimator for a Lithium-Ion Battery Using an Improved Adaptive Particle Filter. Appl. Energy 2017, 190, 740–748. [Google Scholar] [CrossRef]
- Misyris, G.S.; Doukas, D.I.; Papadopoulos, T.A.; Labridis, D.P.; Agelidis, V.G. State-of-Charge Estimation for Li-Ion Batteries: A More Accurate Hybrid Approach. IEEE Trans. Energy Convers. 2018, 34, 109–119. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Zou, C.; Fernandez, C.; Wang, S.; Fan, Y.; Liu, D. A Novel State of Charge Estimation for Energy Storage Systems Based on the Joint Narx Network and Filter Algorithm. Int. J. Electrochem. Sci. 2021, 16, 211213. [Google Scholar] [CrossRef]
- Xiong, R.; Wang, J.; Shen, W.; Tian, J.; Mu, H. Co-Estimation of State of Charge and Capacity for Lithium-Ion Batteries with Multi-Stage Model Fusion Method. Engineering 2021, 7, 1469–1482. [Google Scholar] [CrossRef]
- Zhang, K.; Ma, J.; Zhao, X.; Zhang, D.; He, Y. State of Charge Estimation for Lithium Battery Based on Adaptively Weighting Cubature Particle Filter. IEEE Access 2019, 7, 166657–166666. [Google Scholar] [CrossRef]
- Liaw, B.Y.; Nagasubramanian, G.; Jungst, R.G.; Doughty, D.H. Modeling of Lithium Ion Cells—A Simple Equivalent-Circuit Model Approach. Solid State Ion. 2004, 175, 835–839. [Google Scholar]
- Wei, Z.; Zhao, J.; Ji, D.; Tseng, K.J. A Multi-Timescale Estimator for Battery State of Charge and Capacity Dual Estimation Based on an Online Identified Model. Appl. Energy 2017, 204, 1264–1274. [Google Scholar] [CrossRef]
- Xiong, R. Estimation of Battery Pack State of Electric Vehicles Using Model-Data Fusion Approach. Ph.D. Thesis, Beijing Institute of Technology, Beijing, China, June 2014. [Google Scholar]
- Li, Z.; Shi, X.; Shi, M.; Wei, C.; Di, F.; Sun, H. Investigation on the Impact of the HPPC Profile on the Battery ECM Parameters’ Offline Identification. In Proceedings of the 2020 Asia Energy and Electrical Engineering Symposium (AEEES), Chengdu, China, 29–31 May 2020; pp. 753–757. [Google Scholar]
- Feng, T.; Yang, L.; Zhao, X.; Zhang, H.; Qiang, J. Online Identification of Lithium-Ion Battery Parameters Based on an Improved Equivalent-Circuit Model and Its Implementation on Battery State-Of-Power Prediction. J. Power Sources 2015, 281, 192–203. [Google Scholar] [CrossRef]
- Barcellona, S.; Piegari, L. Lithium Ion Battery Models and Parameter Identification Techniques. Energies 2017, 10, 2007. [Google Scholar] [CrossRef] [Green Version]
- Xu, B.R.; Wang, X.C.; Zhang, Q.; Wang, L.; Wang, D.F. Adaptive Extended Kalman Filter for Estimating the Charging State of Battery. J. Harbin Inst. Technol. 2021, 53, 7. [Google Scholar]
- Wang, Z.; Li, R.; Li, X. SOC Estimation of Li-Ion Battery Based on Mixed AUKF and H∞F. Battery Bimon. 2021, 51, 5. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SOC | Ri | RD | CD |
|---|---|---|---|
| 0.9 | 0.0200678 | 0.0280174 | 6005.6549 |
| 0.8 | 0.0198582 | 0.0295043 | 5975.013 |
| 0.7 | 0.0198537 | 0.0291771 | 6244.846 |
| 0.6 | 0.0198369 | 0.0250574 | 6376.551 |
| 0.5 | 0.0198402 | 0.0272475 | 6077.899 |
| 0.4 | 0.0201856 | 0.0312714 | 45,796.440 |
| 0.3 | 0.0203209 | 0.0322185 | 65,557.043 |
| 0.2 | 0.0206306 | 0.0360988 | 55,199.546 |
| 0.1 | 0.020996 | 0.0429594 | 44,303.6293 |
| Establish the Linear Discretization Equation of Thevenin Model. | |
|---|---|
| Initialization | Set the Initial Value of the State Observer: |
| System state estimation: |
| HIF feature matrix estimation: | |
| Innovation matrix: |
| Gain matrix: | |
| System status correction: | |
| Feature matrix correction: | |
| Take the state and covariance matrix at time as the final output, prepare the state estimate at time (k + 1). |
| Algorithms | ME (%) | MAE (%) | RMSE (%) | Run Time (ms) |
|---|---|---|---|---|
| EKF | 0.97 | 0.27 | 0.30 | 75 |
| HIF | 0.58 | 0.29 | 0.30 | 141 |
| AEKF | 0.25 | 0.20 | 0.20 | 150 |
| FUSE | 0.46 | 0.23 | 0.24 | 103 |
| Algorithms | ME (%) | MAE (%) | RMSE (%) | Run Time (ms) |
|---|---|---|---|---|
| EKF | 1.41 | 0.82 | 0.92 | 180 |
| HIF | 0.97 | 0.42 | 0.52 | 430 |
| AEKF | 1.01 | 0.45 | 0.55 | 455 |
| FUSE | 1.12 | 0.53 | 0.64 | 382 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, A.; Gong, P.; Li, J.; Zhang, K.; Zhou, Y.; Zhang, Z. A State-of-Charge Estimation Method Based on Multi-Algorithm Fusion. World Electr. Veh. J. 2022, 13, 70. https://doi.org/10.3390/wevj13040070
Tang A, Gong P, Li J, Zhang K, Zhou Y, Zhang Z. A State-of-Charge Estimation Method Based on Multi-Algorithm Fusion. World Electric Vehicle Journal. 2022; 13(4):70. https://doi.org/10.3390/wevj13040070
Chicago/Turabian StyleTang, Aihua, Peng Gong, Jiajie Li, Kaiqing Zhang, Yapeng Zhou, and Zhigang Zhang. 2022. "A State-of-Charge Estimation Method Based on Multi-Algorithm Fusion" World Electric Vehicle Journal 13, no. 4: 70. https://doi.org/10.3390/wevj13040070
APA StyleTang, A., Gong, P., Li, J., Zhang, K., Zhou, Y., & Zhang, Z. (2022). A State-of-Charge Estimation Method Based on Multi-Algorithm Fusion. World Electric Vehicle Journal, 13(4), 70. https://doi.org/10.3390/wevj13040070