1. Introduction
In September 2020, China put forward the “double carbon” goal, namely, to strive to achieve peak carbon levels by 2030 and become carbon neutral by 2060 [
1]. To this end, it is urgent to further promote the transformation of the energy structure and to form a new power system led by new energy sources, supported by the interaction of source, grid, storage, and multi-energy complementarity [
2].
Distributed generation, energy storage systems, and controllable loads can be aggregated and coordinated, and optimized through the utilization of virtual power plants, which is an important way to build a new type of power system [
3,
4]. However, virtual power plants are subject to many uncertainties in operation, and how to adopt effective dispatching strategies to ensure their integrated operation quality is a challenge that needs to be solved [
5,
6].
To date, scholars have conducted research on the problem of optimal scheduling of virtual power plants accounting for uncertainty factors. In terms of methods, they can be broadly classified into several categories.
Firstly, there is the probability-based approach. Reference [
7] used random parameters to portray the variability of user response behavior and constructed a fuzzy set of random variables based on Wasserstein distance to propose a two-stage distributed robust optimization model for virtual power plants. References [
8,
9] used information gap decision theory and a fuzzy satisfaction method to describe uncertainty and constructed a zero-carbon optimal operation model. Reference [
10] used fuzzy normalization to deal with uncertainty and introduced an improved chaotic mapping particle swarm algorithm to achieve economic dispatch of microgrid power. Reference [
11] used a combination of phase space reconstruction and a data-driven approach to predict uncertainty and proposed a two-stage day-ahead dispatch model. Reference [
12] formed a typical scenario set based on Kantorovich distance for reduction of the original scenario, and this type of method can describe uncertainty better. However, it requires a known probability distribution or its affiliation function, which is often difficult to obtain in engineering practice.
Secondly, there are methods based on time-domain rolling optimization or multiple time scales. In [
13], a hybrid time-scale strategy was used to optimize the system intra-day and day-ahead. In [
14], a hybrid seasonal autoregressive integrated shift-averaging model SARIMA model and Kalman filter KF algorithm were proposed to predict the uncertain parameters of the system and optimize the scheduling of the virtual power plant based on rolling time-domain optimization and feedback correction. In [
15,
16], a virtual power plant day-ahead and real-time optimal scheduling model was established and an adaptive particle swarm algorithm was used to solve it in the real-time stage, which gives better results but has the disadvantages of a complex process and high dependence on power prediction results.
Thirdly, there are robust optimization methods based on multiple scenarios. In [
17], by calculating the correlation covariance matrix of power output at different moments of the scenery and using the simultaneous backgeneration elimination method to reduce the number of scenarios, a typical set of scenarios is generated to characterize the uncertainty, and a virtual power plant optimization model is established to verify its effectiveness. In [
18], by generating continuous-time scenarios through Latin hypercube sampling and using the simultaneous backgeneration elimination method to reduce the generated scenarios, a virtual power plant optimal scheduling model was built. Reference [
19] used robust optimization to find the optimal solution that makes the system worst in the fluctuation range of uncertain variables and transformed it into a deterministic problem by pairwise comparison. Reference [
20] used an adaptive neuro-fuzzy inference system and spectral clustering method to generate scenarios, established the concept of uncertainty measure to characterize uncertainty, and built a two-stage robust schedulable model. References [
21,
22] used robust optimization to deal with the uncertainty parameter scenario set described by confidence interval and solved by an improved fuzzy equilibrium coordination model. Reference [
23] considered the user endowment effect and environmental awareness established an uncertainty scenario set and built a two-stage robust optimization model. This type of method has the feature of good robustness, but the optimal scheduling result depends on whether the typical scenario has a good representation.
Finally, there are combinatorial optimization methods. References [
24,
25,
26] proposed a two-stage robust optimization scheduling model, in which the uncertainty of the robust model is optimized in the first stage and the worst operation scenario is found within the optimized uncertainty set in the second stage. Reference [
27] considered the uncertainty factor, built a two-stage model of robust optimization based on affine rules, and used mixed integer linear programming to solve it. Reference [
28], under the probabilistic scenario based on the CVaR risk measure, a typical probabilistic scenario approach is used to transform the stochastic problem. Reference [
29] proposes a multi-stage robust pairwise dynamic programming algorithm for uncertainty, and the combined optimization method can synthesize the advantages of a single optimization method, but there are disadvantages such as a complex optimization process and not being easy to implement.
From the engineering application point of view, there is a lack of an optimal scheduling strategy for virtual power plants that can overcome uncertainty but is simple and feasible. The advantages and disadvantages of the different methods are summarized in
Table 1. Unlike other methods, the interval number method can describe uncertainty and has a simple form, which only needs to grasp the upper and lower bounds or midpoints and radii of uncertainties. Moreover, it can transform random variables into interval numbers through confidence level and fuzzy numbers through intercept level, which has good generality. The following comparison table represents a summary of the advantages and disadvantages of each approach to uncertainty and indicates the advantages of interval numbers to describe uncertainty factors.
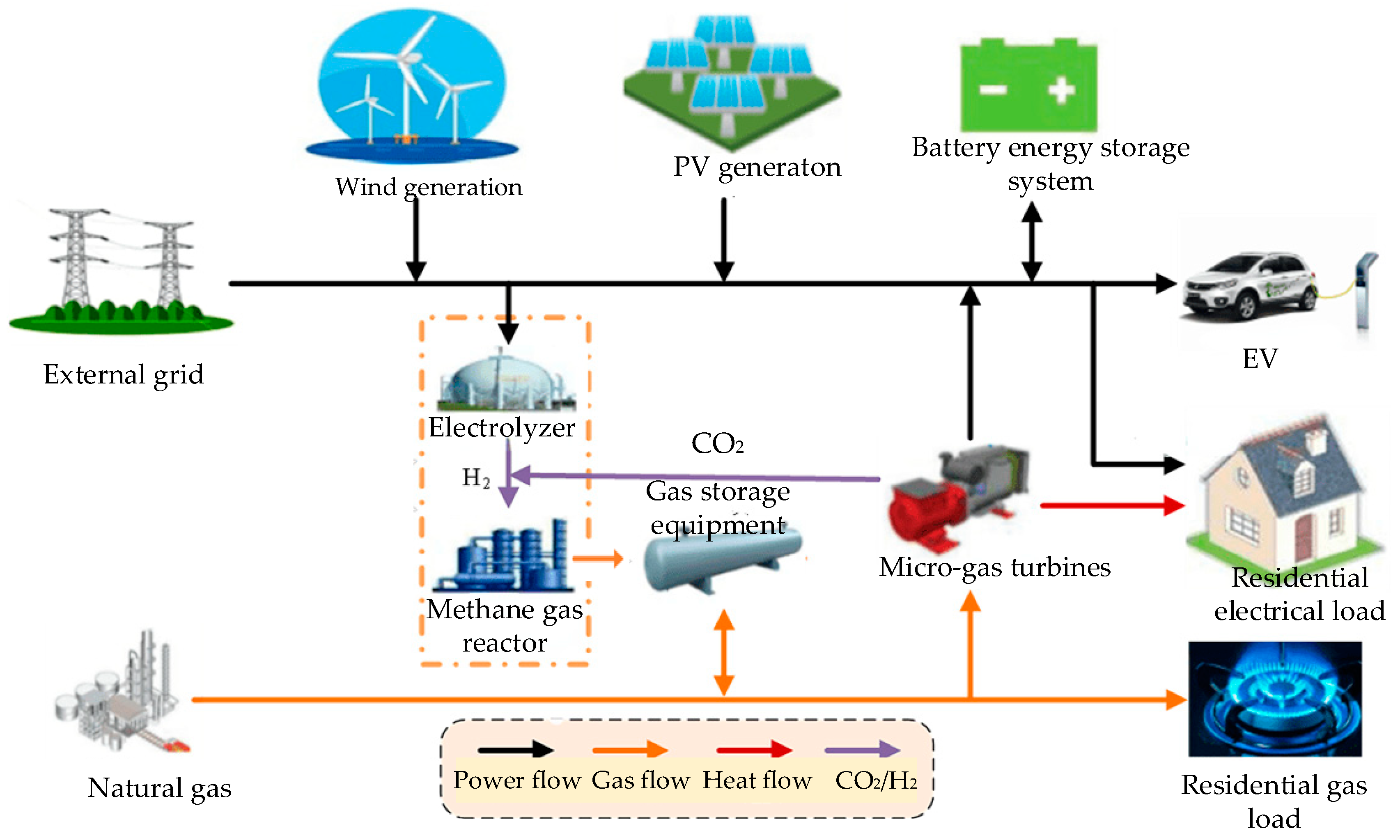
In this paper, considering the engineering applications, the interval number method is adopted as it is an extremely simple and efficient way to deal with uncertainties and is suitable for a large number of engineering practice scenarios. The interval number method is considered for introduction into the optimal scheduling problem of virtual power plants to ensure the feasibility of engineering applications. Specifically, for the virtual power plant incorporating electric vehicles, the interval number is used to describe the stochastic fluctuations of system uncertainties, and the optimization objectives are to improve the operating economy, environmental protection, and grid load smoothing, and to build a multi-objective interval optimal dispatching model considering the constraints of electric-vehicle characteristics and power balance. The optimal scheduling scheme is obtained by using the improved NSGA-II algorithm to perform genetic iterations to obtain the Pareto solution set and hierarchical analysis.
4. Scheduling Solution
The interval multi-objective optimization model developed in this paper is essentially a two-level optimization problem that requires an efficient solution algorithm to obtain the Pareto solution set of the scheduling scheme [
43].
4.1. Outer Layer Optimization Model Solving
The genetic algorithm NSGA-II with elite strategy for non-dominated ranking is one of the best methods for solving multi-objective optimization problems. In this paper, the NSGA-II algorithm is used to solve the outer optimization model [
44], but it needs to be improved to solve the following three problems due to the inclusion of more interval numbers in the objective function and constraints:
- (1)
How to determine whether an individual satisfies the interval constraint.
- (2)
How to define the predominance relation of feasible and infeasible solutions.
- (3)
How to calculate the crowding distance of individuals when comparing individuals with the same ordinal value.
In this paper, we solve problems (1) and (2) by introducing interval credibility and problem (3) by introducing interval overlap.
- (1)
Interval credibility
Consider the intervals
and
, whose widths are denoted as
w(
a) and
w(
b), respectively, then
a is said to be greater than or equal to
b (denoted as
a b) with interval confidence as:
Individuals satisfy the
gj(
x,
c)
j, the confidence level of the constraint is:
Then the individual does not satisfy the
gj(
x, c)
j, the confidence of the constraint is:
When gj(x, c) j satisfies , then x is said to be a feasible solution and vice versa. For two non-feasible solutions, with , this paper will determine the dominance relation by comparing the sum of their violations in overall constraints, i.e., if there exists () < (), then it is said that dominates ; if there exists () > (), then it is said that dominates ; if there exists () = (), then it is said that are mutually exclusive.
- (2)
Interval overlap degree
For two evolved individuals with the same ordinal values,
and
, their
i-th objective function values are
(
,
c) and
(
,
c),
i = 1, 2, 3, …,
M. If we construct an interval
(
,
c)
(
,
c), and the width of this interval is
w(
(
,
c)
(
,
c)), then the overlap of these two evolved individuals with the same ordinal value is:
In multi-objective optimization problems, distributivity is an important indicator of the degree of dispersion of the Pareto optimal solution set in the objective space, and it is necessary to define the crowding distance of individuals to obtain a uniformly distributed Pareto front [
45].
m(
(
,
c)) is the midpoint of
(
,
c), assuming that the volume of the objective function super body of
x1 is
V(
), then the distance between these two evolved individuals with the same ordinal value is:
Assuming that the two closest evolved individuals with the same ordinal value with
x1 are
and
, then the larger
D(
,
) and
D(
,
) are, the less crowded the degree of
is; therefore, the individual crowding distance of
is:
4.2. Inner Layer Optimization Model Solving
When solving the inner optimization model, the maximum and minimum values of each objective are obtained by analyzing the direction of the action of each uncertain element fluctuation on each objective and determining the corresponding extreme scenarios.
- (1)
Economic goals
According to the economic target function, when the residential load, gas load, interactive power with the grid, and interactive power with the gas network take the upper boundary of the interval, and the photovoltaic power and wind power take the lower boundary of the interval, the economic target takes the maximum value; conversely, when the residential load, gas load, interactive power with the grid, and interactive power with the gas network take the lower boundary of the interval, and the photovoltaic power and wind power take the upper boundary of the interval, the economic target takes the minimum value.
- (2)
Environmental Goals
According to the environmental protection objective function, the fluctuation of the power exchange between the virtual power plant and the grid and the gas network directly affects the environmental protection objective.
- (3)
Grid load smoothing target
According to the grid load smoothing target function, the fluctuation of residential electricity load, photovoltaic power generation, and wind power generation affect the grid load smoothing target. When taking the upper boundary of residential electricity load and the lower boundary of photovoltaic power generation and wind power generation, the grid load smoothing target takes the maximum value; conversely, when taking the lower boundary of residential electricity load and the upper boundary of photovoltaic power generation and wind power generation, the grid load smoothing target takes the minimum value.
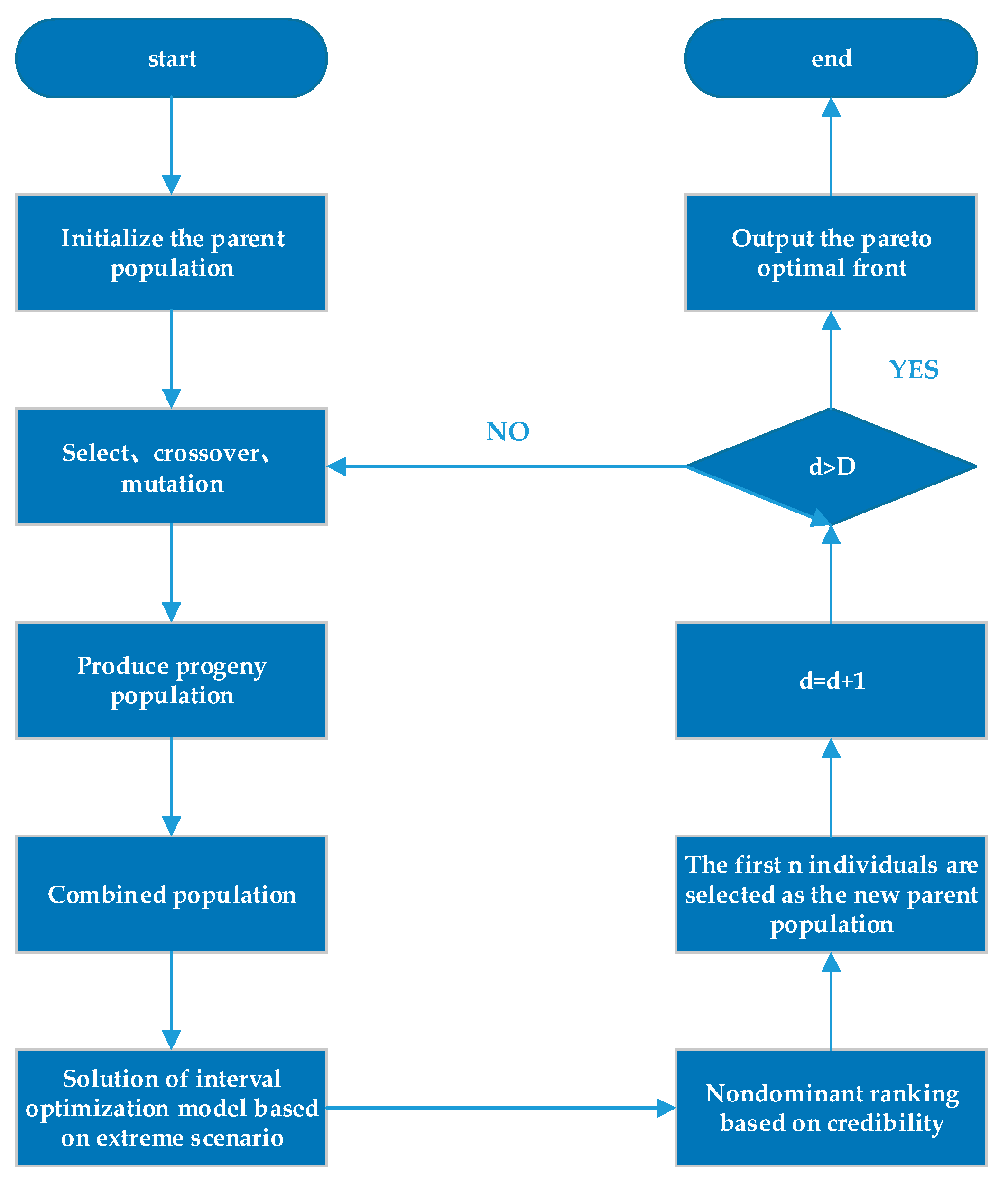
4.3. Nested Solutions of Inner and Outer Optimization Models
In this paper, an improved NSGA-II algorithm incorporating the extreme scenario method is formed by nested solutions of the inner and outer optimization models, and its flow is shown in
Figure 6.





 ,
, 



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}