
A Review of Hybrid Vehicles Classification and Their Energy Management Strategies: An Exploration of the Advantages of Genetic Algorithms

 ,
, 
Abstract
1. Introduction
- A comprehensive review and analysis of the classification of hybrid vehicles and their associated EMSs. This section presents the structural features, operating principles, and performance advantages and disadvantages of each type of hybrid vehicle, based on their classification. This provides readers with a clear understanding of the basic classification of hybrid vehicles.
- The paper will delve into the classification and application of EMSs. The EMS is the cornerstone of hybrid vehicle technology, determining the power performance, fuel economy, and emission levels of the vehicle. This paper compiles and examines the main categories of contemporary energy management technologies, including rule-based and optimization-based approaches. Furthermore, the paper presents the advantages, disadvantages, and applications of these different approaches.
- The paper focuses specifically on the optimization effectiveness of GA-based EMSs. As a review, the paper provides an overview of the potential and current status of GA applications in optimization, offering readers a comprehensive perspective on the research dynamics and trends in the field. The objective of this paper is to provide readers with a comprehensive understanding of the classification methods and energy management techniques of hybrid vehicles, while also serving as a reference and inspiration for further research and applications in related fields.
2. Classification of HEVs
2.1. HEV Classification by Hybridization Rate
- ◆
- Braking Regenerative: During coasting or braking, regenerative braking restores energy normally lost.
- ◆
- Drive/Assist Electric Motor: In order to help the engine accelerate, move, or hill climb, the electric motor provides power. This enables the use of a smaller, more efficient engine.
- ◆
- Stop/Start Automatic: When the car comes to a halt, the engine automatically shuts off and restarts when the accelerator is pressed. It minimizes wasted energy from idling.
2.2. HEV Powertrain Configuration
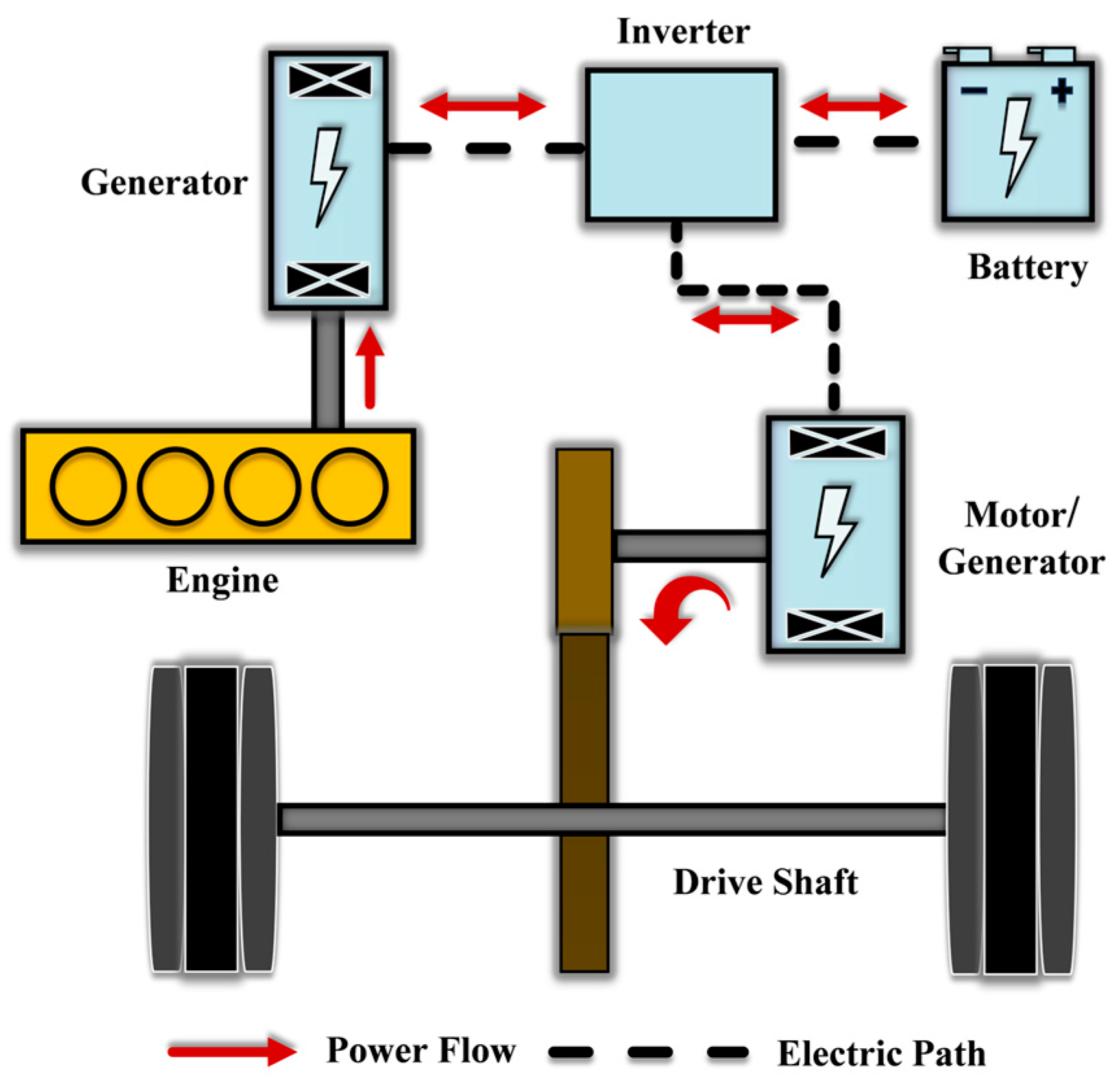
2.2.1. Series Hybrid Powertrain
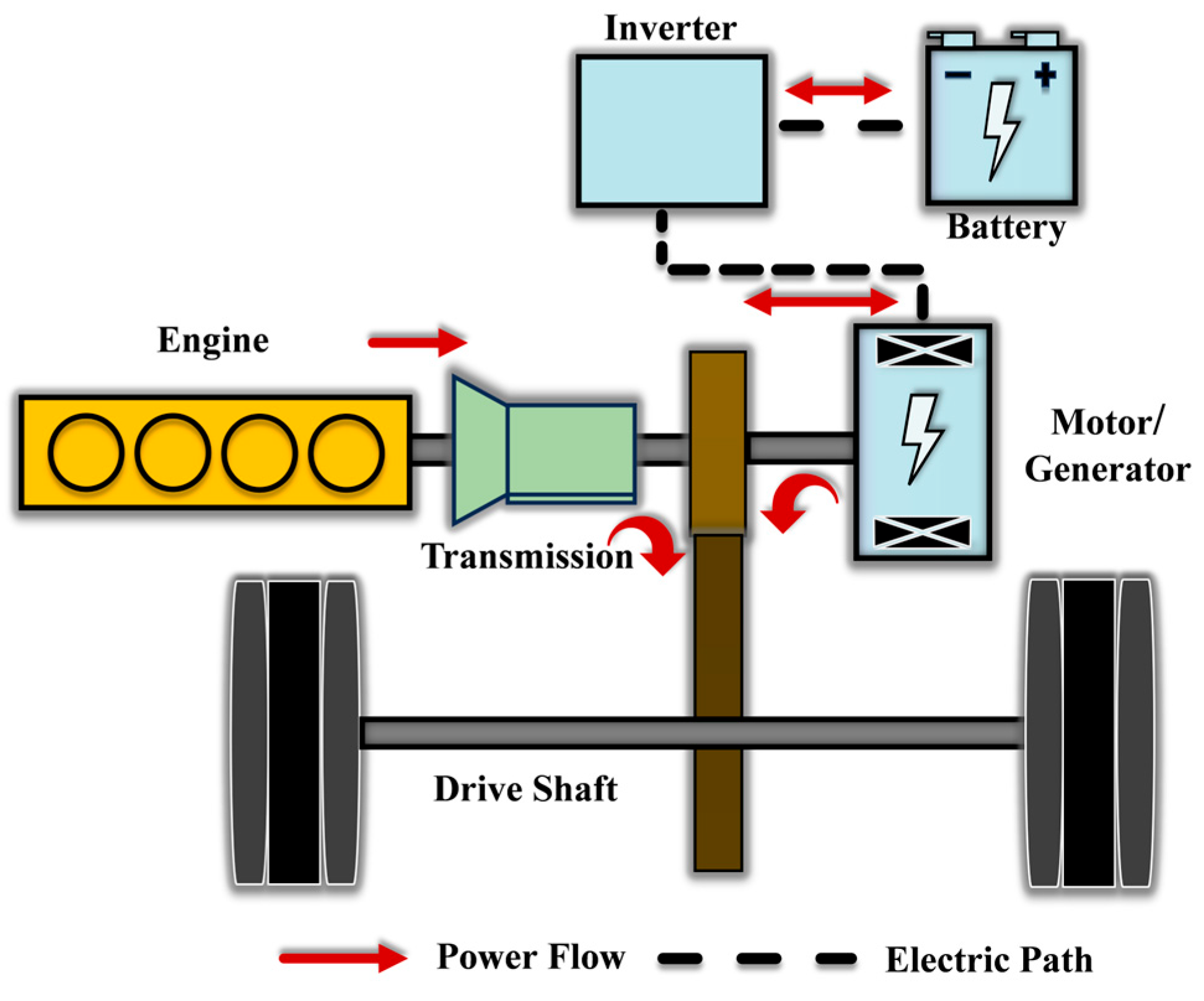
2.2.2. Parallel Hybrid Powertrain
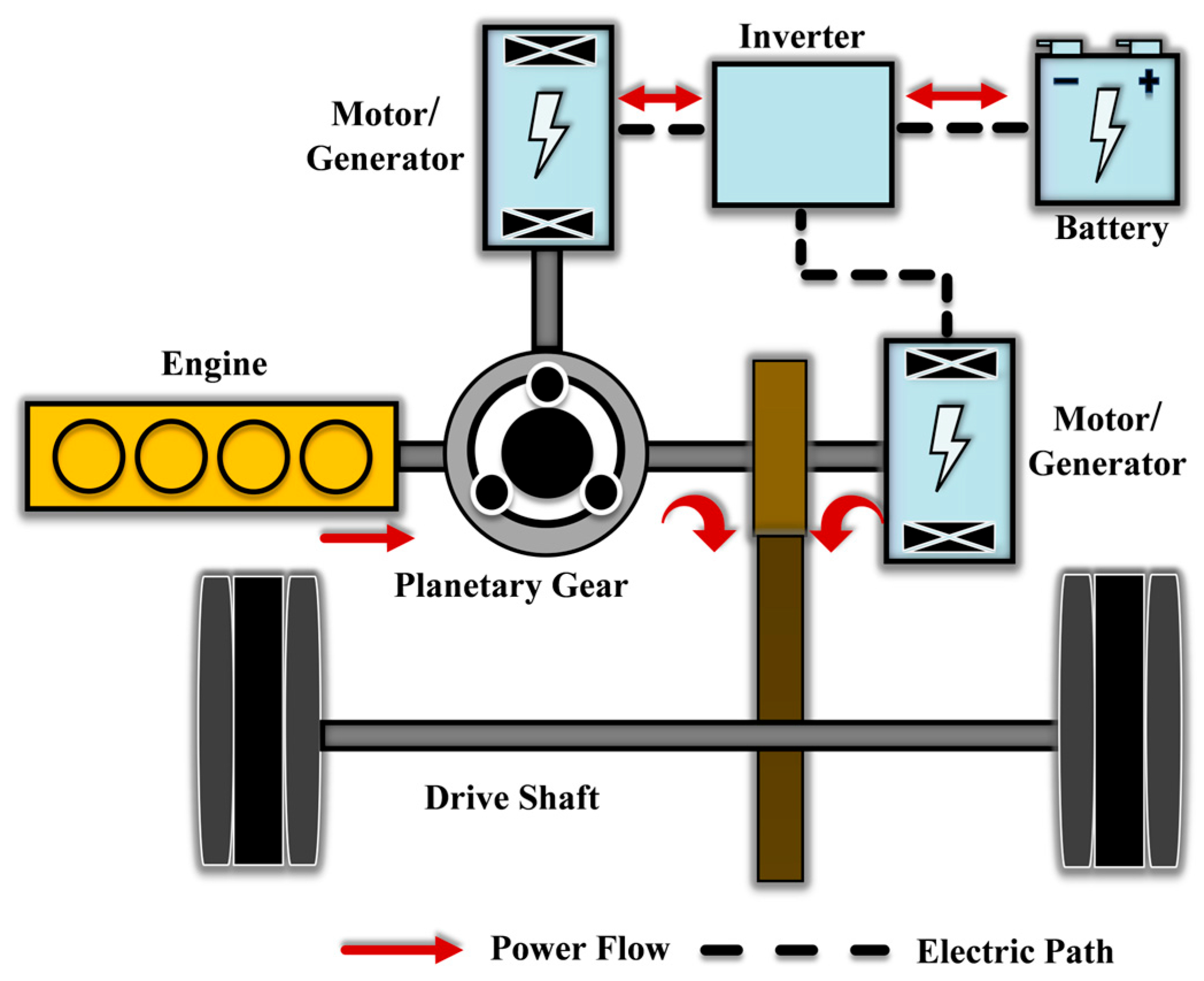
2.2.3. Power-Split Powertrain
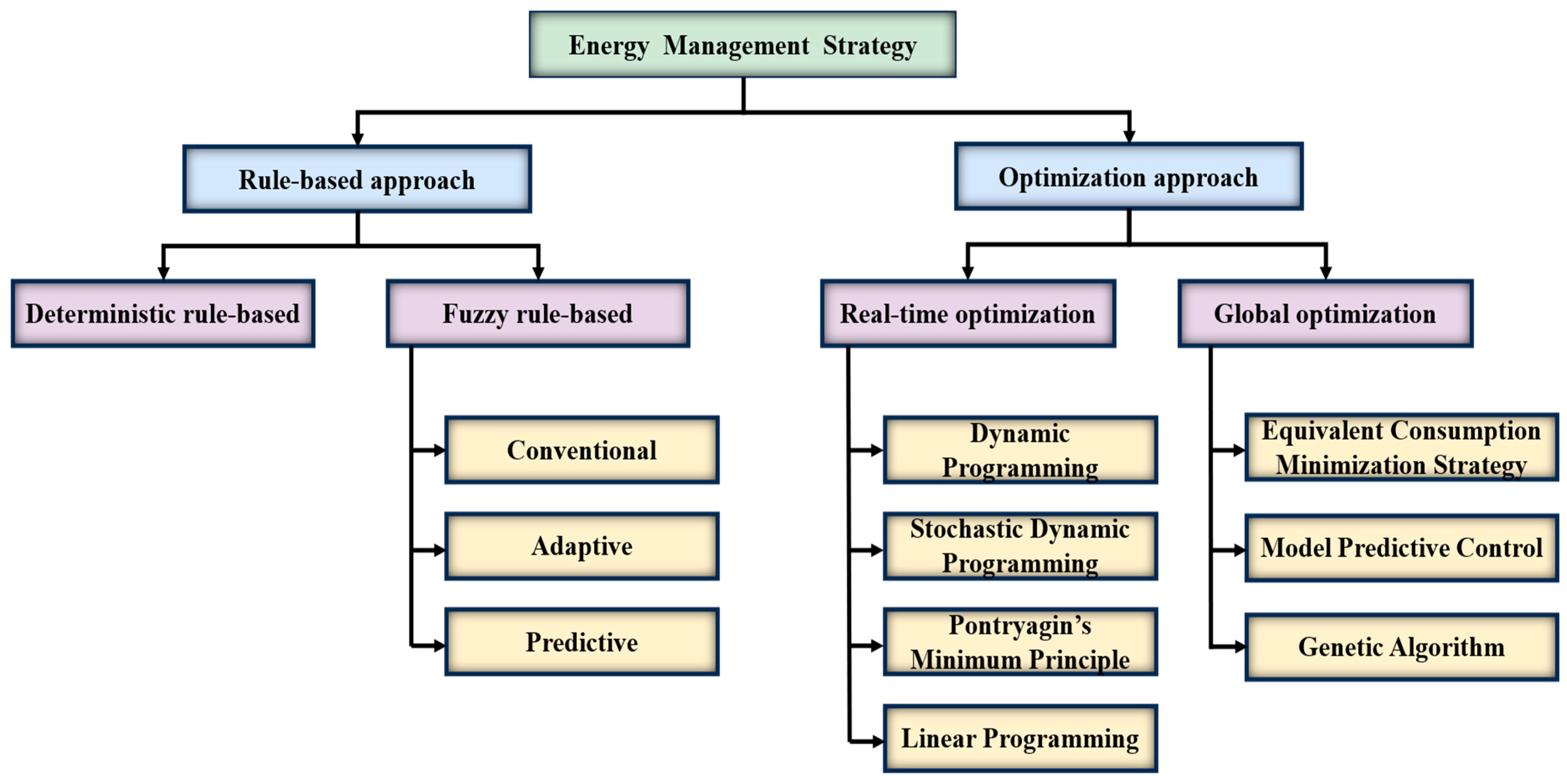
3. Energy Management Strategies for HEVs
3.1. Rule-Based Control Strategies
3.1.1. Deterministic Rule-Based Control Strategy
3.1.2. Fuzzy Rule-Based Control Strategy

3.2. Optimization-Based Control Strategy
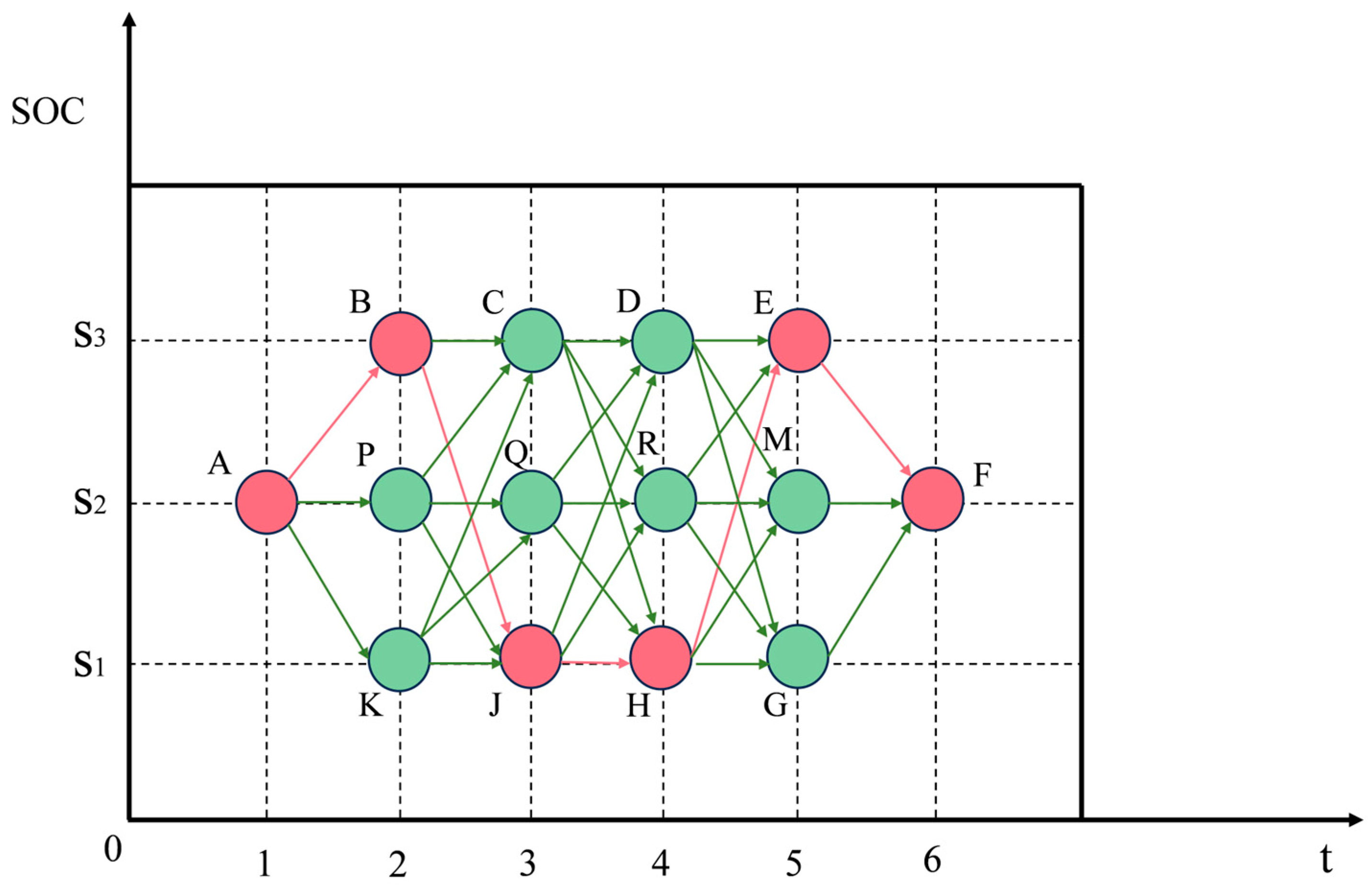
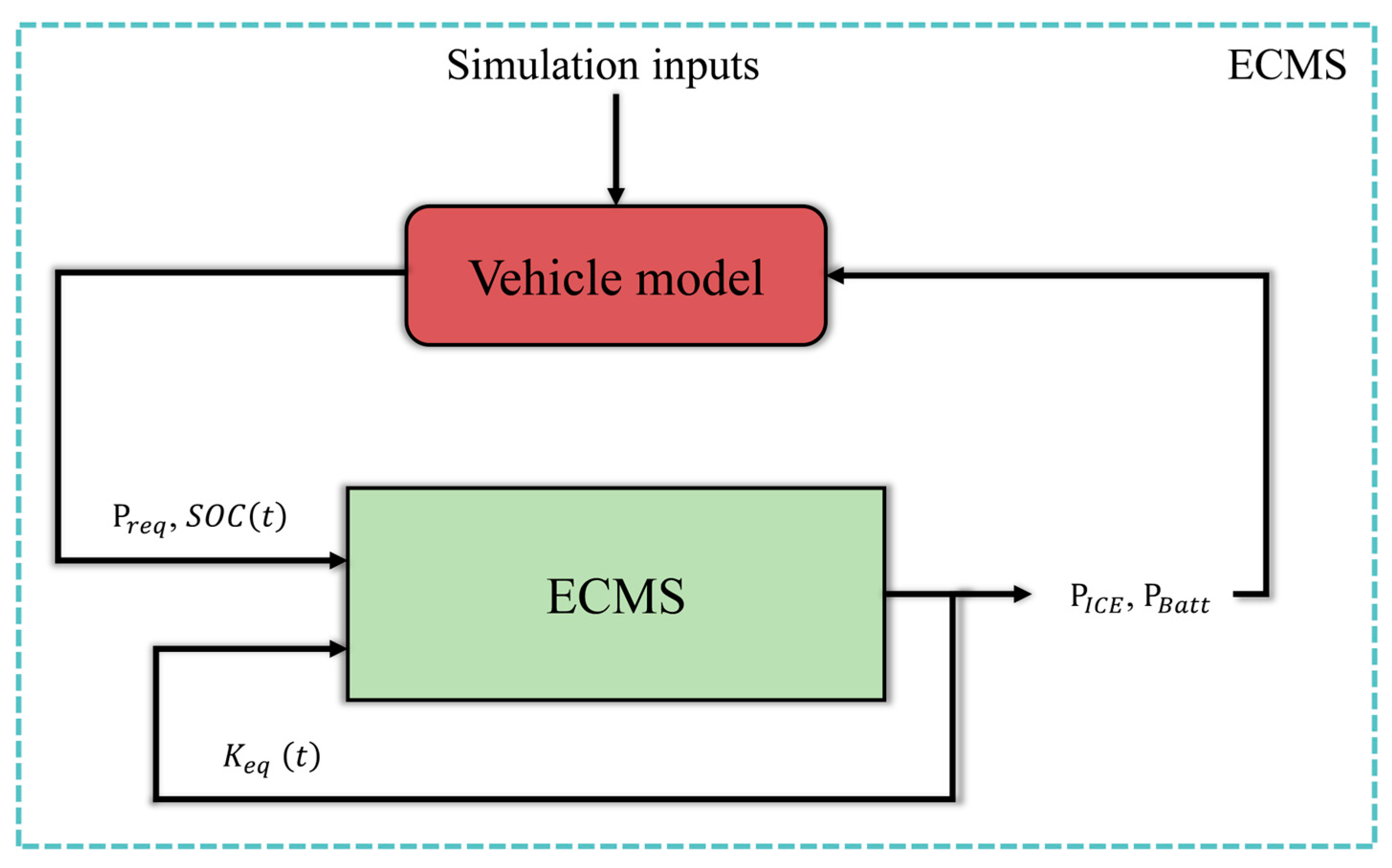
3.2.1. Global Optimization
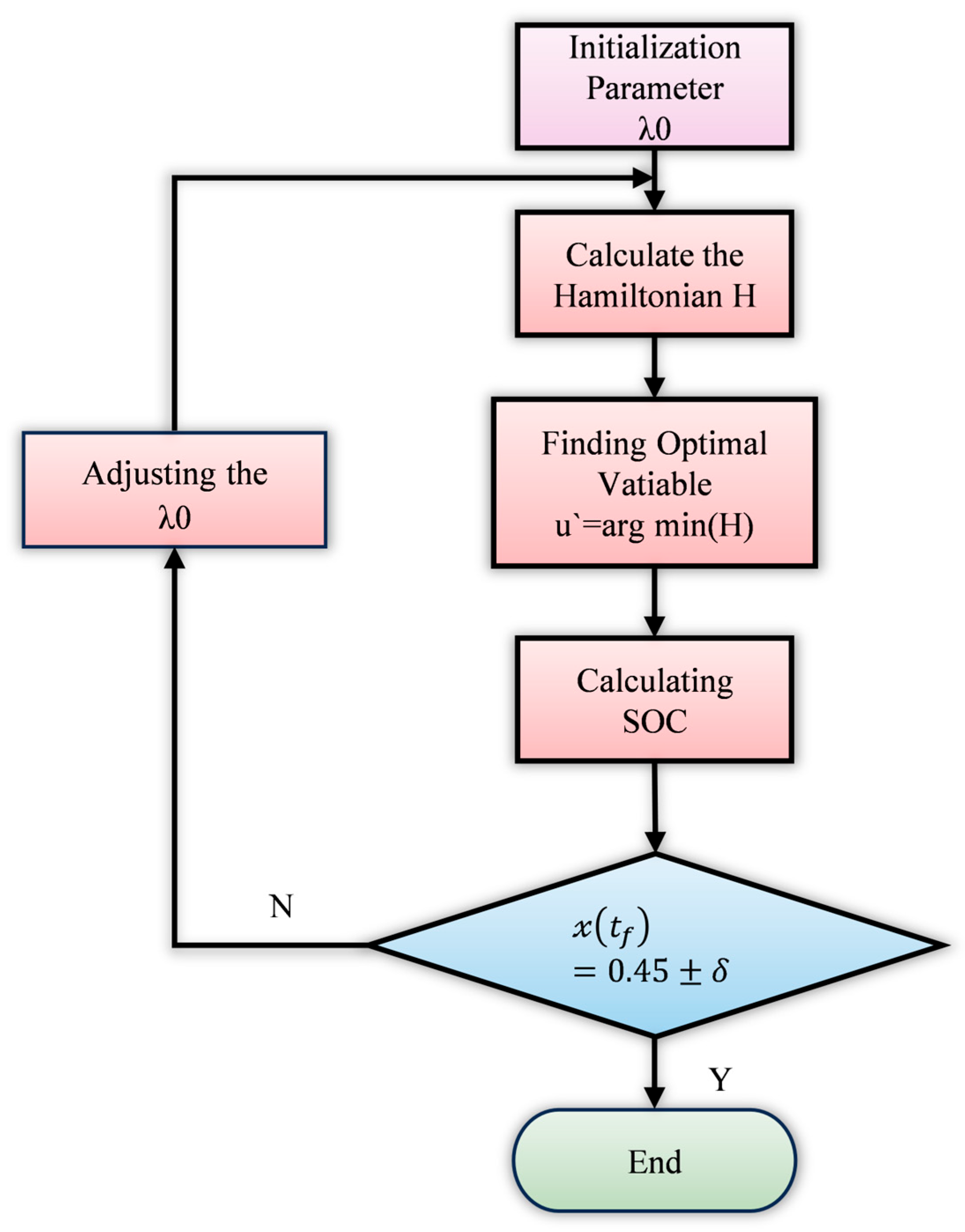
3.2.2. Real-Time Optimization
4. An Exploration of the Advantages of Genetic Algorithms
4.1. The Mathematical Mechanism of the Primitive GA
4.2. The Multi-Objective Optimization Method
4.2.1. Weighted Method
4.2.2. Non-Normalized Method
4.3. Application of GA-Based Energy Management for HEVs
- (1)
- Global search capability: with its parallel search characteristics, GAs can explore the whole parameter space, effectively avoid local optimization, and ensure to find the global optimal EMS, which is much better than traditional optimization methods, as well as fully release the performance potential of hybrid vehicles.
- (2)
- Multi-objective and multi-constraint processing ability: GAs can simultaneously cope with multiple objectives and constraints, such as energy consumption, emissions, driving performance, etc., to find the optimal balance point, while the traditional strategy is often difficult to take into account, resulting in impaired performance.
- (3)
- Adaptability and flexibility: GAs can adaptively adjust their strategies according to the driving conditions and demands, adapting to a variety of road conditions, and efficiently utilizing energy in both congestion and cruising. Traditional fixed strategies are difficult to cope with changing environments.
- (4)
- Improve energy efficiency and driving performance: The GA optimizes the strategy to accurately control the energy flow, improve fuel economy and reduce emissions, while optimizing the driving experience to achieve both comfort and efficiency.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Thomas, S. Transportation options in a carbon-constrained world: Hybrids, plug-in hybrids, biofuels, fuel cell electric vehicles, and battery electric vehicles. Int. J. Hydrogen Energy 2009, 34, 9279–9296. [Google Scholar] [CrossRef]
- Badin, F.; Scordia, J.; Trigui, R.; Vinot, E.; Jeanneret, B. Hybrid electric vehicles energy consumption decrease according to drive train architecture, energy management and vehicle use. In Proceedings of the IET—The Institution of Engineering and Technolgy Hybrid Vehicle Conference 2006, Coventry, UK, 12–13 December 2006; pp. 213–223. [Google Scholar]
- Mierlo, J.V.; Maggetto, G.; Lataire, P. Which energy source for road transport in the future? A comparison of battery, hybrid and fuel cell vehicles. Energy Convers. Manag. 2006, 47, 2748–2760. [Google Scholar] [CrossRef]
- Rezaei, H.; Abdollahi, S.E.; Abdollahi, S.; Filizadeh, S. Energy management strategies of battery-ultracapacitor hybrid storage systems for electric vehicles: Review, challenges, and future trends. J. Energy Storage 2022, 53, 105045. [Google Scholar] [CrossRef]
- Ragab, A.; Marei, M.I.; Mokhtar, M. Comprehensive Study of Fuel Cell Hybrid Electric Vehicles: Classification, Topologies, and Control System Comparisons. Appl. Sci. 2023, 13, 13057. [Google Scholar] [CrossRef]
- Ehsani, M.; Singh, K.V.; Bansal, H.O.; Mehrjardi, R.T. State of the art and trends in electric and hybrid electric vehicles. Proc. IEEE 2021, 109, 967–984. [Google Scholar] [CrossRef]
- Urooj, A.; Nasir, A. Review of intelligent energy management techniques for hybrid electric vehicles. J. Energy Storage 2024, 92, 112132. [Google Scholar] [CrossRef]
- Tran, D.D.; Vafaeipour, M.; El Baghdadi, M.; Fernandez, R.B.; Mierlo, J.V.; Hegazy, O. Thorough state-of-the-art analysis of electric and hybrid vehicle powertrains: Topologies and integrated energy management strategies. Renew. Sustain. Energy Rev. 2020, 119, 109596. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, H.; Xiong, R.; Shen, W.; Liu, B. Energy management strategy of connected hybrid electric vehicles considering electricity and oil price fluctuations: A case study of ten typical cities in China. J. Energy Storage 2021, 36, 102347. [Google Scholar] [CrossRef]
- Aouzellag, H.; Amrouche, B.; Iffouzar, K.; Aouzellag, D. Proposed hysteresis energy management strategy based on storage system efficiency for hybrid electric vehicle. J. Energy Storage 2022, 54, 105259. [Google Scholar] [CrossRef]
- Trovao, J.P.; Pereirinha, P.G.; Jorge, H.M.; Antunes, C.H. A multi-level energy management system for multi-source electric vehicles—An integrated rule-based meta-heuristic approach. Appl. Energy 2013, 105, 304–318. [Google Scholar] [CrossRef]
- Moura, S.J.; Callaway, D.S.; Fathy, H.K.; Stein, J.L. Tradeoffs between battery energy capacity and stochastic optimal power management in plug-in hybrid electric vehicles. J. Power Sources 2010, 195, 2979–2988. [Google Scholar] [CrossRef]
- Chen, Z.; Xiong, R.; Wang, C.; Cao, J. An on-line predictive energy management strategy for plug-in hybrid electric vehicles to counter the uncertain prediction of the driving cycle. Appl. Energy 2017, 185, 1663–1672. [Google Scholar] [CrossRef]
- He, H.; Guo, X. Multi-objective optimization research on the start condition for a parallel hybrid electric vehicle. Appl. Energy 2018, 227, 294–303. [Google Scholar] [CrossRef]
- Lin, C.C.; Peng, H.; Grizzle, J.W.; Kang, J.M. Power management strategy for a parallel hybrid electric truck. IEEE Trans. Control Syst. Technol. 2003, 11, 839–849. [Google Scholar]
- Yang, Y.; Pei, H.; Hu, X.; Liu, Y.; Hou, C.; Cao, D. Fuel economy optimization of power split hybrid vehicles: A rapid dynamic programming approach. Energy 2019, 166, 929–938. [Google Scholar] [CrossRef]
- Peng, J.; He, H.; Xiong, R. Rule based energy management strategy for a series-parallel plug-in hybrid electric bus optimized by dynamic programming. Appl. Energy 2016, 185, 1633–1643. [Google Scholar] [CrossRef]
- Sciarretta, A.; Back, M.; Guzzella, L. Optimal control of parallel hybrid electric vehicles. IEEE Trans. Control Syst. Technol. 2004, 12, 352–363. [Google Scholar] [CrossRef]
- Sun, C.; Sun, F.; He, H. Investigating adaptive-ECMS with velocity forecast ability for hybrid electric vehicles. Appl. Energy 2017, 185, 1644–1653. [Google Scholar] [CrossRef]
- Hu, X.; Murgovski, N.; Johannesson, L.; Bo, E. Energy efficiency analysis of a series plug-in hybrid electric bus with different energy management strategies and battery sizes. Appl. Energy 2013, 111, 1001–1009. [Google Scholar] [CrossRef]
- Xie, S.; Hu, X.; Xin, Z.; Brighton, J. Pontryagin’s minimum principle based model predictive control of energy management for a plug-in hybrid electric bus. Appl. Energy 2019, 236, 893–905. [Google Scholar] [CrossRef]
- Borhan, H.; Vahidi, A.; Phillips, A.M.; Kuang, M.L.; Kolmanovsky, I.V.; Phillips, A.; Cairano, S.D. MPC-based energy management of a power-split hybrid electric vehicle. IEEE Trans. Control Syst. Technol. 2012, 20, 593–603. [Google Scholar] [CrossRef]
- Li, L.; You, S.X.; Yang, C.; Yan, B.; Song, J.; Chen, Z. Driving-behavior-aware stochastic model predictive control for plug-in hybrid electric buses. Appl. Energy 2016, 162, 868–879. [Google Scholar] [CrossRef]
- Li, L.; You, S.X.; Yang, C. Multi-objective stochastic MPC-based system control architecture for plug-in hybrid electric buses. IEEE Trans. Ind. Electron. 2016, 99, 4752–4763. [Google Scholar] [CrossRef]
- Liu, T.; Hu, X.; Li, S.E.; Cao, D. Reinforcement learning optimized look-ahead energy management of a parallel hybrid electric vehicle. IEEE/ASME Trans. Mechatron. 2017, 22, 1497–1507. [Google Scholar] [CrossRef]
- Tian, H.; Li, S.E.; Wang, X.; Huang, Y.; Tian, G. Data driven hierarchical control for online energy management of plug-in hybrid electric city bus. Energy 2018, 142, 55–67. [Google Scholar] [CrossRef]
- He, H.; Niu, Z.; Wang, Y.; Huang, R.; Shou, Y. Energy management optimization for connected hybrid electric vehicle using offline reinforcement learning. J. Energy Storage 2023, 72, 108517. [Google Scholar] [CrossRef]
- Ye, Y.; Zhang, J.; Pilla, S.; Rao, A.M.; Xu, B. Application of a new type of lithium-sulfur battery and reinforcement learning in plug-in hybrid electric vehicle energy management. J. Energy Storage 2023, 59, 106546. [Google Scholar] [CrossRef]
- Wu, Y.; Huang, Z.; Zhang, R.; Huang, P.; Gao, Y.; Li, H.; Liu, Y.; Peng, J. Driving style-aware energy management for battery/supercapacitor electric vehicles using deep reinforcement learning. J. Energy Storage 2023, 73, 109199. [Google Scholar] [CrossRef]
- Liu, R.; Wang, C.; Tang, A.; Zhang, Y.; Yu, Q. A twin delayed deep deterministic policy gradient-based energy management strategy for a battery-ultracapacitor electric vehicle considering driving condition recognition with learning vector quantization neural network. J. Energy Storage 2023, 71, 108147. [Google Scholar] [CrossRef]
- Sulaiman, N.; Hannan, M.A.; Mohamed, A.; Ker, P.J.; Majlan, E.H.; Daud, W.R.W. Optimization of energy management system for fuel-cell hybrid electric vehicles: Issues and recommendations. Appl. Energy 2018, 228, 2061–2079. [Google Scholar] [CrossRef]
- Jiang, P.; Li, R.; Li, H. Multi-objective algorithm for the design of prediction intervals for wind power forecasting model. Appl. Math. Model. 2019, 67, 101–122. [Google Scholar] [CrossRef]
- Xie, J.; Ma, J.; Bai, K. State-of-charge estimators considering temperature effect, hysteresis potential, and thermal evolution for LiFePO4 batteries. Int. J. Energy Res. 2018, 42, 2710–2717. [Google Scholar] [CrossRef]
- Zhou, L.; Zheng, Y.; Ouyang, M.; Lu, L. A study on parameter variation effects on battery packs for electric vehicles. J. Power Sources 2017, 364, 242–252. [Google Scholar] [CrossRef]
- Jondhle, H.; Nandgaonkar, A.B.; Nalbalwar, S.; Jondhle, S. An artificial intelligence and improved optimization-based energy management system of battery-fuel cell-ultracapacitor in hybrid electric vehicles. J. Energy Storage 2023, 74, 109079. [Google Scholar] [CrossRef]
- Saleem, S.; Ahmad, I.; Ahmed, S.H.; Rehman, A. Artificial intelligence based robust nonlinear controllers optimized by improved gray wolf optimization algorithm for plug-in hybrid electric vehicles in grid to vehicle applications. J. Energy Storage 2024, 75, 109332. [Google Scholar] [CrossRef]
- Wieczorek, M.; Lewandowski, M. A mathematical representation of an energy management strategy for hybrid energy storage system in electric vehicle and real time optimization using a genetic algorithm. Appl. Energy 2017, 192, 222–233. [Google Scholar] [CrossRef]
- Wang, C.; Liu, R.; Tang, A. Energy management strategy of hybrid energy storage system for electric vehicles based on genetic algorithm optimization and temperature effect. J. Energy Storage 2022, 51, 104314. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, Y.; Zhang, C.; Zhou, J.; Hu, D.; Yi, F.; Fan, Z.; Zeng, T. Genetic algorithm-based fuzzy optimization of energy management strategy for fuel cell vehicles considering driving cycles recognition. Energy 2023, 263, 126112. [Google Scholar] [CrossRef]
- Mazouzi, A.; Hadroug, N.; Alayed, W.; Hafaifa, A.; Hafaifa, A.; Kouzou, A. Comprehensive optimization of fuzzy logic-based energy management system for fuel-cell hybrid electric vehicle using genetic algorithm. Int. J. Hydrogen Energy 2024, 81, 889–905. [Google Scholar] [CrossRef]
- Tinós, R.; Zhao, L.; Chicano, F.; Whitley, D. NK Hybrid Genetic Algorithm for Clustering. IEEE Trans. Evol. Comput. 2018, 22, 748–761. [Google Scholar] [CrossRef]
- Akopov, A.S.; Beklaryan, L.A. Evolutionary Synthesis of High-Capacity Reconfigurable Multilayer Road Networks Using a Multiagent Hybrid Clustering-Assisted Genetic Algorithm. IEEE Access 2025, 13, 53448–53474. [Google Scholar] [CrossRef]
- Cardoso, D.S.; Fael, P.O.; Espírito-Santo, A. A review of micro and mild hybrid systems. Energy Rep. 2020, 6, 385–390. [Google Scholar] [CrossRef]
- Zhuang, W.; Li, S.; Zhang, X.; Kum, D.; Song, Z.; Yin, G.; Ju, F. A survey of powertrain configuration studies on hybrid electric vehicles. Appl. Energy 2020, 262, 114553. [Google Scholar] [CrossRef]
- Enang, W.; Bannister, C. Modelling and control of hybrid electric vehicles (A comprehensive review). Renew. Sustain. Energy Rev. 2017, 74, 1210–1239. [Google Scholar] [CrossRef]
- Mizushima, N.; Oguma, M. Energy conversion analysis for mild hybrid electric vehicles equipped with an electric supercharged SI engine via multi-domain acausal modeling. Energy Convers. Manag. 2023, 286, 117054. [Google Scholar] [CrossRef]
- Qu, S.; Gohlke, D.; Lin, Z. Quantifying the impacts of micro- and mild- hybrid vehicle technologies on fleetwide fuel economy and electrification. eTransportation 2020, 4, 10058. [Google Scholar]
- Malikopoulos, A.A. Supervisory power management control algorithms for hybrid electric vehicles: A survey. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1869–1885. [Google Scholar] [CrossRef]
- Requia, W.J.; Adams, M.D.; Arain, A.; Koutrakis, P.; Ferguson, M. Carbon dioxide emissions of plug-in hybrid electric vehicles: A life-cycle analysis in eight Canadian cities. Renew. Sustain. Energy Rev. 2017, 78, 1390–1396. [Google Scholar] [CrossRef]
- Yang, Y.; Ali, K.A.; Roeleveld, J.; Emadi, A. State-of-the-art electrified powertrains hybrid, plug-in, and electric vehicles. Int. J. Powertrains 2016, 5, 1. [Google Scholar] [CrossRef]
- Shojaei, S.; Robinson, S.; McGordon, A.; Marco, J. Passengers vs. Battery: Calculation of Cooling Requirements in a PHEV.; SAE Technical Paper 2016-01-0241; SAE International: Warrendale, PA, USA, 2016. [Google Scholar]
- Fletcher, T.; Kalantzis, N.; Ahmedov, A.; Yuan, R.; Ebrahimi, K.; Dutta, N.; Price, C. Holistic Thermal Energy Modelling for Full Hybrid Electric Vehicles (HEVs); SAE Technical Paper; Society of Automotive Engineers (SAE International): Warrendale, PA, USA, 2020. [Google Scholar]
- Das, H.S.; Tan, C.W.; Yatim, A.H.M. Fuel cell hybrid electric vehicles: A review on power conditioning units and topologies. Renew. Sustain. Energy Rev. 2017, 76, 268–291. [Google Scholar] [CrossRef]
- Chen, Z.; Hu, H.; Wu, Y.; Zhang, Y.; Li, G.; Liu, Y. Stochastic model predictive control for energy management of power-split plug-in hybrid electric vehicles based on reinforcement learning. Energy 2020, 211, 118931. [Google Scholar] [CrossRef]
- Chen, Z.; Wu, S.; Shen, S.; Liu, Y.; Guo, F.; Zhang, Y. Co-optimization of velocity planning and energy management for autonomous plug-in hybrid electric vehicles in urban driving scenarios. Energy 2023, 263, 126060. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, L.; Li, M.; Chen, Z. A review of key issues for control and management in battery and ultra-capacitor hybrid energy storage systems. eTransportation 2020, 4, 100064. [Google Scholar] [CrossRef]
- Lü, X.; Wu, Y.; Lian, J.; Zhang, Y.; Chen, C.; Wang, P.; Meng, L. Energy management of hybrid electric vehicles: A review of energy optimization of fuel cell hybrid power system based on genetic algorithm. Energy Convers. Manag. 2020, 205, 112474. [Google Scholar] [CrossRef]
- Shi, K.; Yuan, X.; Liu, L. Model predictive controller-based multi-model control system for longitudinal stability of distributed drive electric vehicle. ISA Trans. 2018, 72, 44–55. [Google Scholar] [CrossRef]
- Zhang, L.P.; Liu, W.; Qi, B. Innovation design and optimization management of a new drive system for plug-in hybrid electric vehicles. Energy 2019, 186, 115823. [Google Scholar] [CrossRef]
- Verma, S.; Mishra, S.; Gaur, A.; Chowdhurya, S.; Mohapatraa, S.; Dwivedia, G.; Verma, P. A comprehensive review on energy storage in hybrid electric vehicle. J. Traffic Transp. Eng. (Engl. Ed.) 2021, 8, 621–637. [Google Scholar] [CrossRef]
- Lyati, M.M. Hybrid Electric Vehicles (HEV): Classification, configuration, and vehicle control. J. SA Electron. 2021, 1, 1–10. [Google Scholar]
- García, A.; Monsalve-Serrano, J. Analysis of a series hybrid vehicle concept that combines low temperature combustion and biofuels as power source. Results Eng. 2019, 1, 100001. [Google Scholar] [CrossRef]
- Sivertsson, M.; Eriksson, L. Optimal powertrain lock-up transients for a heavy duty series hybrid electric vehicle. IFAC-Pap. 2017, 50, 7842–7848. [Google Scholar] [CrossRef]
- Kim, D.M.; Benoliel, P.; Kim, D.K.; Lee, T.H.; Park, J.W.; Hong, J.P. Framework development of series hybrid powertrain design for heavy-duty vehicle considering driving conditions. IEEE Trans. Veh. Technol. 2019, 68, 6468–6480. [Google Scholar] [CrossRef]
- Husain, I. Electric and Hybrid Vehicles: Design Fundamentals; CRC Press: Boca Raton, FL, USA, 2021. [Google Scholar]
- Sabri, M.F.M.; Danapalasingam, K.A.; Rahmat, M.F. A review on hybrid electric vehicles architecture and energy management strategies. Renew. Sustain. Energy Rev. 2016, 53, 1433–1442. [Google Scholar] [CrossRef]
- Zhao, C.; Zu, B.; Xu, Y.; Wang, Z.; Zhou, J.; Liu, L. Design and analysis of an engine-start control strategy for a single-shaft parallel hybrid electric vehicle. Energy 2020, 202, 117621. [Google Scholar] [CrossRef]
- Panday, A.; Bansal, H.O. A review of optimal energy management strategies for hybrid electric vehicle. Int. J. Veh. Technol. 2014, 2014, 160510. [Google Scholar] [CrossRef]
- Anselma, P.G.; Belingardi, G.; Falai, A.; Maino, C.; MIRETTI, F.; Misul, D.; Spessa, E. Comparing parallel hybrid electric vehicle powertrains for real-world driving. In Proceedings of the 2019 AEIT International Conference of Electrical and Electronic Technologies for Automotive (AEIT AUTOMOTIVE), Turin, Italy, 2–4 July 2019; IEEE: New York, NY, USA, 2019; pp. 1–6. [Google Scholar]
- Al-Samari, A. Study of emissions and fuel economy for parallel hybrid versus conventional vehicles on real world and standard driving cycles. Alex. Eng. J. 2017, 56, 721–726. [Google Scholar] [CrossRef]
- Congress, G.C. Volkswagen launches new Passat GTE plug-in hybrid in Europe. In Green Car Congress; 2015; Volume 14, Available online: https://www.greencarcongress.com/2015/07/20150714-passatgte.html (accessed on 13 May 2025).
- Liu, J.; Peng, H. Modeling and control of a power-split hybrid vehicle. IEEE Trans. Control Syst. Technol. 2008, 16, 1242–1251. [Google Scholar]
- Pei, H.; Hu, X.; Yang, Y.; Tang, X.; Hou, C.; Cao, D. Configuration optimization for improving fuel efficiency of power split hybrid powertrains with a single planetary gear. Appl. Energy 2018, 214, 103–116. [Google Scholar] [CrossRef]
- Miller, J.M. Hybrid electric vehicle propulsion system architectures of the e-CVT type. IEEE Trans. Power Electron. 2006, 21, 756–767. [Google Scholar] [CrossRef]
- Zhang, X.; Peng, H.; Sun, J. A near-optimal power management strategy for rapid component sizing of multimode power split hybrid vehicles. IEEE Trans. Control Syst. Technol. 2014, 23, 609–618. [Google Scholar] [CrossRef]
- Kabalan, B.; Vinot, E.; Yuan, C.; Cheng, Y.; Trigui, R.; Dumand, C.; El-Hajji, T. Efficiency improvement of a series–parallel hybrid electric powertrain by topology modification. IEEE Trans. Veh. Technol. 2019, 68, 11523–11531. [Google Scholar] [CrossRef]
- Yue, H.; Lin, J.; Dong, P.; Chen, Z.; Xu, X. Configurations and Control Strategies of Hybrid Powertrain Systems. Energies 2023, 16, 725. [Google Scholar] [CrossRef]
- Yang, H.; Kim, B.; Park, Y.; Lim, W.; Cha, S. Analysis of planetary gear hybrid powertrain system part 2: Output split system. Int. J. Automot. Technol. 2009, 10, 381–390. [Google Scholar] [CrossRef]
- Yang, L.; Hu, M.; Qin, D.; Fu, C. Analysis and optimization of a novel power-split hybrid powertrain. IEEE Trans. Veh. Technol. 2019, 68, 10504–10517. [Google Scholar] [CrossRef]
- Kim, H.; Kum, D. Comprehensive design methodology of input-and output-split hybrid electric vehicles: In search of optimal configuration. IEEE/ASME Trans. Mechatron. 2016, 21, 2912–2923. [Google Scholar] [CrossRef]
- Qin, Z.; Luo, Y.; Zhuang, W.; Pan, Z.; Li, K.; Peng, H. Simultaneous optimization of topology, control and size for multi-mode hybrid tracked vehicles. Appl. Energy 2018, 212, 1627–1641. [Google Scholar] [CrossRef]
- Gu, J.; Zhao, Z.; Chen, Y. Integrated optimal design of configuration and parameter of multimode hybrid powertrain system with two planetary gears. Mech. Mach. Theory 2020, 143, 103630. [Google Scholar] [CrossRef]
- Zhang, F.; Yang, F.; Xue, D.; Cai, Y. Optimization of compound power split configurations in PHEV bus for fuel consumption and battery degradation decreasing. Energy 2019, 169, 937–957. [Google Scholar] [CrossRef]
- Wang, F.; Xia, J.; Xu, X.; Cai, Y.; Ni, S.; Que, H. Torsional vibration-considered energy management strategy for power-split hybrid electric vehicles. J. Clean. Prod. 2021, 296, 126399. [Google Scholar] [CrossRef]
- Tang, X.; Zhang, J.; Cui, X.; Lin, X. Multi-objective design optimization of a novel dual-mode power-split hybrid powertrain. IEEE Trans. Veh. Technol. 2021, 71, 282–296. [Google Scholar] [CrossRef]
- Bao, S.; Sun, P.; Zhu, J.; Ji, Q.; Liu, J. Improved Multi-dimensional Dynamic Programming Energy Management Strategy for A Vehicle Power-split Hybrid Powertrain. Energy 2022, 256, 124682. [Google Scholar] [CrossRef]
- Zhao, Z.; Tang, P.; Li, H. Generation, screening, and optimization of powertrain configurations for power-split hybrid electric vehicle: A comprehensive overview. IEEE Trans. Transp. Electrif. 2021, 8, 325–344. [Google Scholar] [CrossRef]
- Zhang, F.; Wang, L.; Coskun, S.; Pang, H.; Cui, Y.; Xi, J. Energy management strategies for hybrid electric vehicles: Review, classification, comparison, and outlook. Energies 2020, 13, 3352. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, H.; Guo, Q. Varying-domain optimal management strategy for parallel hybrid electric vehicles. IEEE Trans. Veh. Technol. 2014, 63, 603–616. [Google Scholar] [CrossRef]
- Torreglosa, J.P.; Garcia-Triviño, P.; Vera, D.; López-García, D.A. Analyzing the improvements of energy management systems for hybrid electric vehicles using a systematic literature review: How far are these controls from rule-based controls used in commercial vehicles? Appl. Sci. 2020, 10, 8744. [Google Scholar] [CrossRef]
- Rana, L.B.; Shrestha, A.; Phuyal, S.; Mali, B.; Lakhey, O. Design and performance evaluation of series hybrid electric vehicle using backward model. J. Eng. 2020, 2020, 1095–1102. [Google Scholar] [CrossRef]
- Hwang, H.Y. Develo** equivalent consumption minimization strategy for advanced hybrid system-II electric vehicles. Energies 2020, 13, 2033. [Google Scholar] [CrossRef]
- Reddy, D. Optimum Energy Control of a Robotic Electric Vehicle at Time with Improved Control Assignment Approaches. Turk. J. Comput. Math. Educ. (TURCOMAT) 2021, 12, 1292–1299. [Google Scholar]
- Won, H.W. Development of a hybrid electric vehicle simulation tool with a rule-based topology. Appl. Sci. 2021, 11, 11319. [Google Scholar] [CrossRef]
- Wu, B.; Lin, C.C.; Filipi, Z.; Peng, H.; Assanis, D. Optimal power management for a hydraulic hybrid delivery truck. Veh. Syst. Dyn. 2004, 42, 23–40. [Google Scholar] [CrossRef]
- Xiang, C.; Ding, F.; Wang, W.; He, W. Energy management of a dual-mode power-split hybrid electric vehicle based on velocity prediction and nonlinear model predictive control. Appl. Energy 2017, 189, 640–653. [Google Scholar] [CrossRef]
- Lian, R.; Peng, J.; Wu, Y.; Tan, H.; Zhang, H. Rule-interposing deep reinforcement learning based energy management strategy for power-split hybrid electric vehicle. Energy 2020, 197, 117297. [Google Scholar] [CrossRef]
- Dextreit, C.; Kolmanovsky, I.V. Game theory controller for hybrid electric vehicles. IEEE Trans. Control Syst. Technol. 2013, 22, 652–663. [Google Scholar] [CrossRef]
- Kim, J.; Kim, T.; Min, B.; Hwang, S.; Kim, H. Mode control strategy for a two-mode hybrid electric vehicle using electrically variable transmission (EVT) and fixed-gear mode. IEEE Trans. Veh. Technol. 2011, 60, 793–803. [Google Scholar] [CrossRef]
- Lee, H.; Song, C.; Kim, N.; Cha, S.W. Comparative analysis of energy management strategies for HEV: Dynamic programming and reinforcement learning. IEEE Access 2020, 8, 67112–67123. [Google Scholar] [CrossRef]
- Tang, X.; Chen, J.; Pu, H.; Liu, T.; Khajepour, A. DDPG-based decision-making strategy of adaptive cruising for heavy vehicles considering stability. IEEE Access 2020, 8, 59225–59246. [Google Scholar]
- Tang, X.; Chen, J.; Pu, H.; Liu, T.; Khajepour, A. Double deep reinforcement learning-based energy management for a parallel hybrid electric vehicle with engine start–stop strategy. IEEE Trans. Transp. Electrif. 2021, 8, 1376–1388. [Google Scholar] [CrossRef]
- Hu, B.; Li, J. An adaptive hierarchical energy management strategy for hybrid electric vehicles combining heuristic domain knowledge and data-driven deep reinforcement learning. IEEE Trans. Transp. Electrif. 2021, 8, 3275–3288. [Google Scholar] [CrossRef]
- Huang, K.D.; Nguyen, M.-K.; Chen, P.-T. A rule-based control strategy of driver demand to enhance energy efficiency of hybrid electric vehicles. Appl. Sci. 2022, 12, 8507. [Google Scholar] [CrossRef]
- Liu, W. Introduction to Hybrid Vehicle System Modeling and Control; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Huynh, Q.V.; Dat, L.V.; Le, K.T. An intelligent regenerative braking strategy for power-split hybrid electric vehicle. Int. J. Mech. Eng. Appl. 2020, 8, 27. [Google Scholar] [CrossRef]
- Dao, H.V.; To, X.D.; Truong, H.V.A.; Do, T.C.; Ho, C.M.; Dang, T.D.; Ahn, K.K. Optimization-based fuzzy energy management strategy for PEM fuel cell/battery/supercapacitor hybrid construction excavator. Int. J. Precis. Eng. Manuf. -Green Technol. 2021, 8, 1267–1285. [Google Scholar] [CrossRef]
- Chen, L.; Liao, Z.; Ma, X. Nonlinear model predictive control for heavy-duty hybrid electric vehicles using random power prediction method. IEEE Access 2020, 8, 202819–202835. [Google Scholar] [CrossRef]
- Sarvaiya, S.; Ganesh, S.; Xu, B. Comparative analysis of hybrid vehicle energy management strategies with optimization of fuel economy and battery life. Energy 2021, 228, 120604. [Google Scholar] [CrossRef]
- Luo, X.; Deng, B.; Gan, W. Research on fuzzy control strategy and genetic algorithm optimization for parallel hybrid electric vehicle. J. Phys. Conf. Ser. 2021, 1986, 012106. [Google Scholar] [CrossRef]
- Jia, Q.; Zhang, H.; Zhang, Y.; Yang, J.; Wu, J. Parameter matching and performance analysis of a master-slave electro-hydraulic hybrid electric vehicle. Processes 2022, 10, 1664. [Google Scholar] [CrossRef]
- Bai, M.; Yang, W.; Zhang, R.; Kosuda, M.; Korba, P.; Hovanec, M. Fuzzy-based optimal energy management strategy of series hybrid-electric propulsion system for UAVs. J. Energy Storage 2023, 68, 107712. [Google Scholar] [CrossRef]
- Xue, Q.; Zhang, X.; Teng, T.; Zhang, J.; Feng, Z.; Lvt, Q. A comprehensive review on classification, energy management strategy, and control algorithm for hybrid electric vehicles. Energies 2020, 13, 5355. [Google Scholar] [CrossRef]
- Bellman, R.; Kalaba, R. Dynamic programming and statistical communication theory. Proc. Natl. Acad. Sci. USA 1957, 43, 749–751. [Google Scholar] [CrossRef]
- He, H.; Zhang, J.; Li, G. Model predictive control for energy management of a plug-in hybrid electric bus. Energy Procedia 2016, 88, 901–907. [Google Scholar] [CrossRef]
- Patil, R.M.; Filipi, Z.; Fathy, H.K. Comparison of supervisory control strategies for series plug-in hybrid electric vehicle powertrains through dynamic programming. IEEE Trans. Control Syst. Technol. 2013, 22, 502–509. [Google Scholar] [CrossRef]
- Murphey, Y.L.; Park, J.; Kiliaris, L.; Kuang, M. Intelligent hybrid vehicle power control—Part II: Online intelligent energy management. IEEE Trans. Veh. Technol. 2012, 62, 69–79. [Google Scholar] [CrossRef]
- Wang, H.; Oncken, J.; Chen, B. Receding horizon control for mode selection and powertrain control of a multi-mode hybrid electric vehicle. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019; IEEE: New York, NY, USA, 2019; pp. 1–5. [Google Scholar]
- Zhu, H.; Song, Z.; Hou, J.; Hofmann, H. Simultaneous identification and control using active signal injection for series hybrid electric vehicles based on dynamic programming. IEEE Trans. Transp. Electrif. 2020, 6, 298–307. [Google Scholar] [CrossRef]
- Kasture, A. A Power Management Strategy for a Parallel Through-the-Road Plug-in Hybrid Electric Vehicle Using Genetic Algorithm. Master’s Thesis, Purdue University, West Lafayette, IN, USA, 2020. [Google Scholar]
- Zhang, H.; Shi, D.; Cai, Y.; Zhout, W. Research on Transmission Efficiency Oriented Predictive Control of Power Split Hybrid Electric Vehicle. Math. Probl. Eng. 2020, 2020, 8507. [Google Scholar]
- Inuzuka, S.; Shen, T.; Kojima, T. Dynamic programming based energy management of HEV with three driving modes. IOP Conf. Ser. Mater. Sci. Eng. 2020, 715, 012063. [Google Scholar] [CrossRef]
- Maino, C.; Misul, D.; Musa, A.; Spessa, E. Optimal mesh discretization of the dynamic programming for hybrid electric vehicles. Appl. Energy 2021, 292, 116920. [Google Scholar] [CrossRef]
- Zhu, Q.; Prucka, R. Transient hybrid electric vehicle powertrain control based on iterative dynamic programing. J. Dyn. Syst. Meas. Control 2022, 144, 021003. [Google Scholar] [CrossRef]
- Zhou, Q.; Du, C. A two-term energy management strategy of hybrid electric vehicles for power distribution and gear selection with intelligent state-of-charge reference. J. Energy Storage 2021, 42, 103054. [Google Scholar] [CrossRef]
- Bae, J.W.; Kim, K.-K.K. Gaussian process approximate dynamic programming for energy-optimal supervisory control of parallel hybrid electric vehicles. IEEE Trans. Veh. Technol. 2022, 71, 8367–8380. [Google Scholar] [CrossRef]
- Anselma, P.G. Dynamic programming based rapid energy management of hybrid electric vehicles with constraints on smooth driving, battery state-of-charge and battery state-of-health. Energies 2022, 15, 1665. [Google Scholar] [CrossRef]
- Liu, C.; Li, X.; Chen, Y.; Wei, C.; Liu, X.; Li, K. Real-time energy management strategy for fuel cell/battery vehicle based on speed prediction DP solver model predictive control. J. Energy Storage 2023, 73, 109288. [Google Scholar] [CrossRef]
- Han, R.; He, H.; Zhang, Z.; Quan, S.; Chen, J. A multi-objective hierarchical energy management strategy for a distributed fuel-cell hybrid electric tracked vehicle. J. Energy Storage 2024, 76, 109858. [Google Scholar] [CrossRef]
- Leroy, T.; Malaizé, J.; Corde, G. Towards real-time optimal energy management of HEV powertrains using stochastic dynamic programming. In Proceedings of the 2012 IEEE Vehicle Power and Propulsion Conference, Seoul, Republic of Korea, 9–12 October 2012; IEEE: New York, NY, USA, 2012; pp. 383–388. [Google Scholar]
- Ko, J.; Ko, S.; Son, H.; Yoo, B. Development of brake system and regenerative braking cooperative control algorithm for automatic-transmission-based hybrid electric vehicles. IEEE Trans. Veh. Technol. 2014, 64, 431–440. [Google Scholar] [CrossRef]
- Lee, H.; Cha, S.W.; Kim, H.; Kim, S.-J. Energy Management Strategy of Hybrid Electric Vehicle Using Stochastic Dynamic Programming; No. 2015-01-0019. SAE Technical Paper; SAE International: Warrendale, PA, USA, 2015. [Google Scholar]
- Zeng, X.; Wang, J. A parallel hybrid electric vehicle energy management strategy using stochastic model predictive control with road grade preview. IEEE Trans. Control Syst. Technol. 2015, 23, 2416–2423. [Google Scholar] [CrossRef]
- Liu, B.; Li, L.; Wang, X.; Cheng, S. Hybrid electric vehicle downshifting strategy based on stochastic dynamic programming during regenerative braking process. IEEE Trans. Veh. Technol. 2018, 67, 4716–4727. [Google Scholar] [CrossRef]
- Jiao, X.; Li, Y.; Xu, F.; Jing, Y. Real-time energy management based on ECMS with stochastic optimized adaptive equivalence factor for HEVs. Cogent Eng. 2018, 5, 1540027. [Google Scholar] [CrossRef]
- Li, Y.; Jiao, X. Real-time energy management for commute HEVs using modified A-ECMS with traffic information recognition. IET Intell. Transp. Syst. 2019, 13, 729–737. [Google Scholar] [CrossRef]
- Aubeck, F.; Mertes, S.; Lenz, M.; Pischinger, S. A stochastic particle filter energy optimization approach for power-split trajectory planning for hybrid electric autonomous vehicles. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 19 October–13 November 2020; IEEE: New York, NY, USA, 2020; pp. 1364–1369. [Google Scholar]
- Ulmer Marlin, W. Horizontal combinations of online and offline approximate dynamic programming for stochastic dynamic vehicle routing. Cent. Eur. J. Oper. Res. 2020, 28, 279–308. [Google Scholar] [CrossRef]
- Yang, N.; Han, L.; Xiang, C.; Liu, H.; Ma, T.; Ruan, S. Real-time energy management for a hybrid electric vehicle based on heuristic search. IEEE Trans. Veh. Technol. 2022, 71, 12635–12647. [Google Scholar] [CrossRef]
- Pontryagin, L.S. Mathematical Theory of Optimal Processes; Routledge: London, UK, 2018. [Google Scholar]
- Zhang, N.; Ma, X.; Jin, L. Energy management for parallel HEV based on PMP algorithm. In Proceedings of the 2017 2nd International Conference on Robotics and Automation Engineering (ICRAE), Shanghai, China, 29–31 December 2017; IEEE: New York, NY, USA, 2017; pp. 177–182. [Google Scholar]
- Xu, K.; Qiu, B.; Liu, G.; Chen, Q. Energy management strategy design of plug-in hybrid electric bus based on Pontryagin’s minimum principle. In Proceedings of the 2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; IEEE: New York, NY, USA, 2014; pp. 1–6. [Google Scholar]
- Liu, T.; Zou, Y.; Liu, D.; Sun, F. Real-time control for a parallel hybrid electric vehicle based on Pontryagin’s minimum principle. In Proceedings of the 2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; IEEE: New York, NY, USA, 2014; pp. 1–5. [Google Scholar]
- Li, T.; Liu, H.; Zhao, D.; Wang, L. Design and analysis of a fuel cell supercapacitor hybrid construction vehicle. Int. J. Hydrogen Energy 2016, 41, 12307–12319. [Google Scholar] [CrossRef]
- Zhu, M.; Wu, X.; Xu, M. Adaptive Optimal Management Strategy for Hybrid Vehicles Based on Pontryagin’s Minimum Principle; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2020. [Google Scholar]
- Liang, B.; Guo, H.; Zhang, K. A robust co-state predictive model for energy management of plug-in hybrid electric bus. J. Clean. Prod. 2020, 250, 119478. [Google Scholar]
- Guo, H.; Hou, D.; Du, S.; Zhao, L.; Wu, J.; Yan, N. A driving pattern recognition-based energy management for plug-in hybrid electric bus to counter the noise of stochastic vehicle mass. Energy 2020, 198, 117289. [Google Scholar] [CrossRef]
- Yi, F.; Lu, D.; Wang, X.; Pan, C.; Tao, Y.; Zhou, J.; Zhao, C. Energy management strategy for hybrid energy storage electric vehicles based on pontryagin’s minimum principle considering battery degradation. Sustainability 2022, 14, 1214. [Google Scholar] [CrossRef]
- Ritter, A.; Widmer, F.; Duhr, P.; Onder, C.H. Long-term stochastic model predictive control for the energy management of hybrid electric vehicles using Pontryagin’s minimum principle and scenario-based optimization. Appl. Energy 2022, 322, 119192. [Google Scholar] [CrossRef]
- Hou, D.; Dong, Q.; Zhou, Y. Taguchi robust design for adaptive energy management of plug-in fuel cell electric bus. J. Energy Storage. 2022, 53, 105038. [Google Scholar] [CrossRef]
- Ma, Z.; Luan, Y.X.; Zhang, F.Q.; Xie, S.B.; Coskun, S. A data-driven energy management strategy for plug-in hybrid electric buses considering vehicle mass uncertainty. J. Energy Storage. 2024, 77, 109963. [Google Scholar] [CrossRef]
- Onat, N.C.; Aboushaqrah, N.N.; Kucukvar, M.; Tarlochan, F.; Hamouda, A.M. From sustainability assessment to sustainability management for policy development: The case for electric vehicles. Energy Convers. Manag. 2020, 216, 112937. [Google Scholar] [CrossRef]
- Afrashi, K.; Bahmani-Firouzi, B.; Nafar, M. Multicarrier energy system management as mixed integer linear programming. Iran. J. Sci. Technol. Trans. Electr. Eng. 2021, 45, 619–631. [Google Scholar] [CrossRef]
- Zhang, B.; Xu, F.; Zhang, J.; Shen, T. Real-time control algorithm for minimising energy consumption in parallel hybrid electric vehicles. IET Electr. Syst. Transp. 2020, 10, 331–340. [Google Scholar] [CrossRef]
- De Pascali, L.; Biral, F.; Onori, S. Aging-aware optimal energy management control for a parallel hybrid vehicle based on electrochemical-degradation dynamics. IEEE Trans. Veh. Technol. 2020, 69, 10868–10878. [Google Scholar] [CrossRef]
- Robuschi, N.; Salazar, M.; Viscera, N.; Braghin, F.; Onder, C.H. Minimum-fuel energy management of a hybrid electric vehicle via iterative linear programming. IEEE Trans. Veh. Technol. 2020, 69, 14575–14587. [Google Scholar] [CrossRef]
- Ghandriz, T.; Jacobson, B.; Murgovski, N.; Nilsson, P.; Laine, L. Real-time predictive energy management of hybrid electric heavy vehicles by sequential programming. IEEE Trans. Veh. Technol. 2021, 70, 4113–4128. [Google Scholar] [CrossRef]
- Vafaeipour, M.; El Baghdadi, M.; Van Mierlo, J.; Hegazy, O.; Verbelen, F.; Sergeant, P. An ECMS-based approach for energy management of a HEV equipped with an electrical variable transmission. In Proceedings of the 2019 Fourteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 8–10 May 2019; IEEE: New York, NY, USA, 2019; pp. 1–9. [Google Scholar]
- Yu, H.; Zhang, F.; Xi, J.; Cao, D. Mixed-integer optimal design and energy management of hybrid electric vehicles with automated manual transmissions. IEEE Trans. Veh. Technol. 2020, 69, 12705–12715. [Google Scholar] [CrossRef]
- Zhou, B.; Burl, J.B.; Rezaei, A. Equivalent consumption minimization strategy with consideration of battery aging for parallel hybrid electric vehicles. IEEE Access 2020, 8, 204770–204781. [Google Scholar] [CrossRef]
- Han, L.; Jiao, X.; Zhang, Z. Recurrent neural network-based adaptive energy management control strategy of plug-in hybrid electric vehicles considering battery aging. Energies 2020, 13, 202. [Google Scholar] [CrossRef]
- Yang, S.; Wang, J.; Zhang, F.; Xi, J. Self-adaptive equivalent consumption minimization strategy for hybrid electric vehicles. IEEE Trans. Veh. Technol. 2020, 70, 189–202. [Google Scholar] [CrossRef]
- Zhang, F.; Hu, X.; Liu, T.; Xu, K.; Duan, Z.; Pang, H. Computationally efficient energy management for hybrid electric vehicles using model predictive control and vehicle-to-vehicle communication. IEEE Trans. Veh. Technol. 2020, 70, 237–250. [Google Scholar] [CrossRef]
- Hao, L.; Wang, Y.; Bai, Y.; Zhou, Q. Energy management strategy on a parallel mild hybrid electric vehicle based on breadth first search algorithm. Energy Convers. Manag. 2021, 243, 114408. [Google Scholar] [CrossRef]
- Mounica, V.; Obulesu, Y.P. Hybrid power management strategy with fuel cell, battery, and supercapacitor for fuel economy in hybrid electric vehicle application. Energies 2022, 15, 4185. [Google Scholar] [CrossRef]
- Hu, J.; Zhu, P.; Wu, Z.; Tian, J. A real-time multi-objective optimization method in energy efficiency for plug-in hybrid electric vehicles considering dynamic electrochemical characteristics of battery and driving conditions. J. Energy Storage 2024, 84, 110779. [Google Scholar] [CrossRef]
- Huang, Y.; Wang, H.; Khajepour, A.; He, H.; Ji, J. Model predictive control power management strategies for HEVs: A review. J. Power Sources 2017, 341, 91–106. [Google Scholar] [CrossRef]
- Hu, X.; Zhang, X.; Tang, X.; Lin, X. Model predictive control of hybrid electric vehicles for fuel economy, emission reductions, and inter-vehicle safety in car-following scenarios. Energy 2020, 196, 117101. [Google Scholar] [CrossRef]
- Xu, F.; Shen, T. Look-ahead prediction-based real-time optimal energy management for connected HEVs. IEEE Trans. Veh. Technol. 2020, 69, 2537–2551. [Google Scholar] [CrossRef]
- Madsen, A.K.; Trimboli, M.S.; Perera, D.G. An optimized FPGA-based hardware accelerator for physics-based EKF for battery cell management. In Proceedings of the 2020 IEEE International Symposium on Circuits and Systems (ISCAS), Seville, Spain, 12–14 October 2020; IEEE: New York, NY, USA, 2020; pp. 1–5. [Google Scholar]
- Sotoudeh, S.M.; HomChaudhuri, B. A robust MPC-based hierarchical control strategy for energy management of hybrid electric vehicles in presence of uncertainty. In Proceedings of the 2020 American Control Conference (ACC), Denver, CO, USA, 1–3 July 2020; IEEE: New York, NY, USA, 2020; pp. 3065–3070. [Google Scholar]
- Zhao, S.; Amini, M.R.; Sun, J.; Mi, C.C. A two-layer real-time optimization control strategy for integrated battery thermal management and hvac system in connected and automated hevs. IEEE Trans. Veh. Technol. 2021, 70, 6567–6576. [Google Scholar]
- Al-Saadi, Z.; Van, D.P.; Amani, A.M.; Fayyazi, M.; Sajjadi, S.S.; Pham, D.B.; Jazar, R.; Khayyam, H. Intelligent driver assistance and energy management systems of hybrid electric autonomous vehicles. Sustainability 2022, 14, 9378. [Google Scholar] [CrossRef]
- Lü, X.; Li, S.; He, X.H.; Xie, C. Hybrid electric vehicles: A review of energy management strategies based on model predictive control. J. Energy Storage 2022, 56, 106112. [Google Scholar] [CrossRef]
- Liu, X.; Yang, C.; Meng, Y.; Zhu, J.; Duan, Y.; Chen, Y. Hierarchical energy management of plug-in hybrid electric trucks based on state-of-charge optimization. J. Energy Storage 2023, 72, 107999. [Google Scholar] [CrossRef]
- Essa Mohamed El-Sayed, M.; M Elhalawany, B.; Abd-Elwahed, M.E.K.; Elsisi, M.; Victor, W. Lotfy, J.; Rabie, K. Low-cost hardware in the loop for intelligent neural predictive control of hybrid electric vehicle. Electronics 2023, 12, 971. [Google Scholar] [CrossRef]
- Tao, Z.; Guozhi, P.; Yanwei, Z.; Shaobo, X. Economic-social-oriented energy management of plug-in hybrid electric vehicles including social cost of carbon. J. Energy Storage 2024, 90, 111767. [Google Scholar] [CrossRef]
- Ding, N.; Prasad, K.; Lie, T.T. Design of a hybrid energy management system using designed rule-based control strategy and genetic algorithm for the series-parallel plug-in hybrid electric vehicle. Int. J. Energy Res. 2021, 45, 1627–1644. [Google Scholar] [CrossRef]
- Konak, A.; Coit, D.W.; Smith, A.E. Multi-objective optimization using genetic algorithms: A tutorial. Reliab. Eng. Syst. Saf. 2006, 91, 992–1007. [Google Scholar] [CrossRef]
- Huang, B.; Wang, Z.; Xu, Y. Multi-objective genetic algorithm for hybrid electric vehicle parameter optimization. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; IEEE: New York, NY, USA, 2006; pp. 5177–5182. [Google Scholar]
- Song, P.; Lei, Y.; Fu, Y. Multi-objective optimization and matching of power source for PHEV based on genetic algorithm. Energies 2020, 13, 1127. [Google Scholar] [CrossRef]
- Min, D.; Song, Z.; Chen, H.; Wang, T.; Zhang, T. Genetic algorithm optimized neural network based fuel cell hybrid electric vehicle energy management strategy under start-stop condition. Appl. Energy 2022, 306, 118036. [Google Scholar] [CrossRef]
- Li, Y.; Wang, S.; Duan, X.; Liu, S.; Liu, J.; Hu, S. Multi-objective energy management for Atkinson cycle engine and series hybrid electric vehicle based on evolutionary NSGA-II algorithm using digital twins. Energy Convers. Manag. 2021, 230, 113788. [Google Scholar] [CrossRef]
- Tang, D.; Zhang, Z.; Hua, L.; Pan, J. Prediction of cold start emissions for hybrid electric vehicles based on genetic algorithms and neural networks. J. Clean. Prod. 2023, 420, 138403. [Google Scholar] [CrossRef]
- Montazeri-Gh, M.; Poursamad, A.; Ghalichi, B. Application of genetic algorithm for optimization of control strategy in parallel hybrid electric vehicles. J. Frankl. Inst. 2006, 343, 420–435. [Google Scholar] [CrossRef]
- Xu, Y.; Zhang, H.; Yang, Y.; Zhang, J.; Yang, F.; Yan, D.; Yang, H.; Wang, Y. Optimization of energy management strategy for extended range electric vehicles using multi-island genetic algorithm. J. Energy Storage 2023, 61, 106802. [Google Scholar] [CrossRef]
- Zhao, S.; Guo, M. Electric vehicle power system in intelligent manufacturing based on soft computing optimization. Heliyon 2024, 10, e38946. [Google Scholar] [CrossRef] [PubMed]
- Yuan, H.B.; Zou, W.J.; Jung, S.; Kim, Y.B. Optimized rule-based energy management for a polymer electrolyte membrane fuel cell/battery hybrid power system using a genetic algorithm. Int. J. Hydrogen Energy 2022, 47, 7932–7948. [Google Scholar] [CrossRef]
- Kemper, N.; Heider, M.; Pietruschka, D.; Hähnert, J. A comparative study of multi-objective and neuroevolutionary-based reinforcement learning algorithms for optimizing electric vehicle charging and load management. Appl. Energy 2025, 391, 125890. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function or Component Parameters | Types of HEV | |||
|---|---|---|---|---|
| Micro | Mild | Full | Plug-In | |
| Idle Stop/Start | ● | ● | ● | ● |
| Electric Torque Assistance | ● | ● | ● | |
| Energy Recuperation | ● | ● | ● | |
| Electric Drive | ● | ● | ||
| Battery Charging | ● | ● | ||
| Battery Charging (from Grid) | ● | |||
| Battery Voltage (V) | 12 | 48–160 | 200–300 | 300–400 |
| Electric Machine Power (kW) | 2–3 | 10–15 | 30–50 | 60–100 |
| EV Mode Range (km) | 0 | 0 | 5–10 | >10 |
| CO2 Estimated Benefit | 5–6% | 7–12% | 15–20% | >20% |
| Rule Category | Design Basis | Implementation Method | Representative Studies |
|---|---|---|---|
| Load-Zone Partitioning Rules | Division of engine efficiency map into high/medium/low-efficiency zones | Matching demanded power with optimal load zones | Wu et al. (2004) [95] |
| Mode Shift Rules | Co-optimization of gear ratio and SOC | Decoupling engine speed through multi-mode transmissions | Gu et al. (2020) [82] |
| Dynamic Compensation Rules | Rate of change in accelerator pedal position | Predictive adjustment of motor compensation power | Xiang et al. (2017) [96] |
| Expert Knowledge-Integrated Rules | Encoding engineering experience into DRL reward functions | Embedding rule constraints in DDPG algorithms | Lian et al. (2020) [97] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, Y.; Zhong, K.; Xie, Y.; Pan, M.; Guan, W.; Li, L.; Liu, C.; Man, X.; Zhang, Z.; Li, M. A Review of Hybrid Vehicles Classification and Their Energy Management Strategies: An Exploration of the Advantages of Genetic Algorithms. Algorithms 2025, 18, 354. https://doi.org/10.3390/a18060354
Pan Y, Zhong K, Xie Y, Pan M, Guan W, Li L, Liu C, Man X, Zhang Z, Li M. A Review of Hybrid Vehicles Classification and Their Energy Management Strategies: An Exploration of the Advantages of Genetic Algorithms. Algorithms. 2025; 18(6):354. https://doi.org/10.3390/a18060354
Chicago/Turabian StylePan, Yuede, Kaifeng Zhong, Yubao Xie, Mingzhang Pan, Wei Guan, Li Li, Changye Liu, Xingjia Man, Zhiqing Zhang, and Mantian Li. 2025. "A Review of Hybrid Vehicles Classification and Their Energy Management Strategies: An Exploration of the Advantages of Genetic Algorithms" Algorithms 18, no. 6: 354. https://doi.org/10.3390/a18060354
APA StylePan, Y., Zhong, K., Xie, Y., Pan, M., Guan, W., Li, L., Liu, C., Man, X., Zhang, Z., & Li, M. (2025). A Review of Hybrid Vehicles Classification and Their Energy Management Strategies: An Exploration of the Advantages of Genetic Algorithms. Algorithms, 18(6), 354. https://doi.org/10.3390/a18060354